Embed Size (px)
Citation preview

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 1MAE 323 Lecture 5 Putting It All Together
Part I:
A Quadratic Serendipity
Plane Stress Element

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 2MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods
•The first energy method to be used with FEM was the Rayleigh-Ritz
method. This method is based on the idea of minimizing the total
energy in a system by minimizing it’s variation, δ. This can be seen
in the example below
x0 x2
u(x0,0)
u(x2,0)
x1
u(x1,δ)=u(x1,0)+δu u(x1,δ)
u(x1,0)
A smoothly varying
function, u over the
domain x0≤x≤x2 may
be found by
minimizing all
smooth functions
u(x,δ) which equal
u(x,0) at x0 and x2
u(x1,0)
δu

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 3MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods
•The parameter, δ may be thought of as a “virtual function” (or variation), and the
function, u is a function of this parameter (thus u(x,δ)-u(x,0)=δu(x) may be thought of as
a virtual displacement), as well as distance x
•Mathematically, the problem may be stated as:
Find the function, u for which the variation of the line integral, I for fixed x0,x2 is zero:
2
0
( ) ( , ',... ) 0x
xI x L u u x dxδ δ= =∫
OR:
0
0dI
d δδ =
=
(13)
(14)
•Applying (14) to (13) and integrating by parts leads to:
2
0 '
x
x
dI L d L udx
d u dx uδ δ
∂ ∂ ∂ = −
∂ ∂ ∂ ∫ (15)
where ' /u u x=∂ ∂
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 4MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods
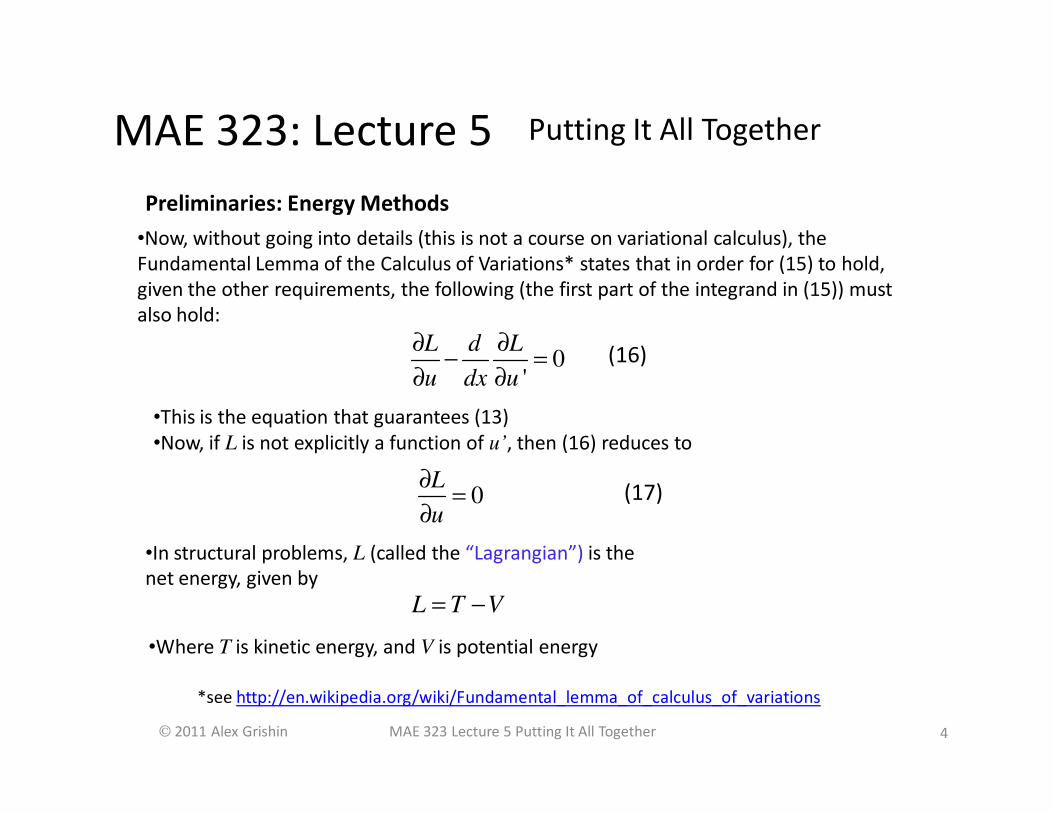
•Now, without going into details (this is not a course on variational calculus), the
Fundamental Lemma of the Calculus of Variations* states that in order for (15) to hold,
given the other requirements, the following (the first part of the integrand in (15)) must
also hold:
•This is the equation that guarantees (13)
•Now, if L is not explicitly a function of u’, then (16) reduces to
0'
L d L
u dx u
∂ ∂− =
∂ ∂
(17)
(16)
0L
u
∂=
∂
•In structural problems, L (called the “Lagrangian”) is the
net energy, given by
L T V= −
•Where T is kinetic energy, and V is potential energy
*see http://en.wikipedia.org/wiki/Fundamental_lemma_of_calculus_of_variations
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 5MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods
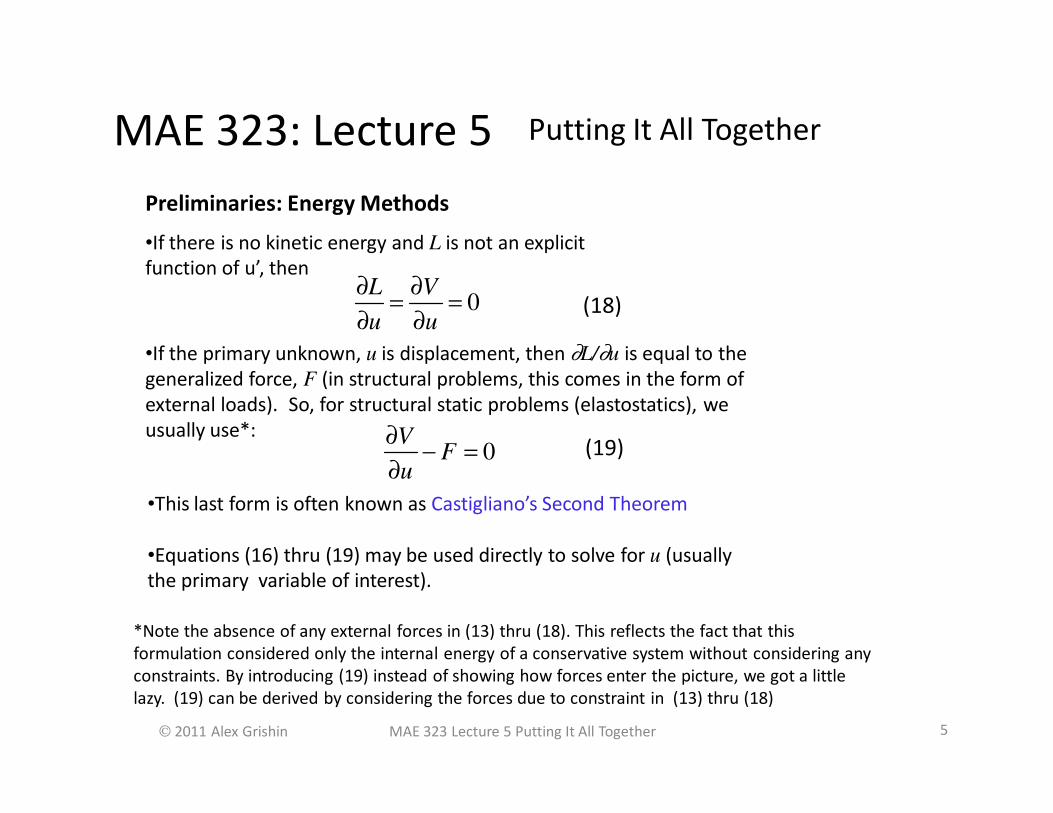
•If there is no kinetic energy and L is not an explicit
function of u’, then
(18)0L V
u u
∂ ∂= =
∂ ∂
•This last form is often known as Castigliano’s Second Theorem
•Equations (16) thru (19) may be used directly to solve for u (usually
the primary variable of interest).
•If the primary unknown, u is displacement, then ∂L/∂u is equal to the
generalized force, F (in structural problems, this comes in the form of
external loads). So, for structural static problems (elastostatics), we
usually use*:0
VF
u
∂− =
∂(19)
*Note the absence of any external forces in (13) thru (18). This reflects the fact that this
formulation considered only the internal energy of a conservative system without considering any
constraints. By introducing (19) instead of showing how forces enter the picture, we got a little
lazy. (19) can be derived by considering the forces due to constraint in (13) thru (18)

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 6MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods
•To see how equation (19) is used, consider the simple case of a
spring, fixed at one end with an applied load F on the other
•First, write the expression for the potential energy:
•Now, substitute into equation (19):
21
2V ku=
0v
F ku Fu
∂− = − =
∂
•Hooke’s Law is recovered, and we can solve for u. In continuum and
reduced continuum problems, equation (19) will be an integral equation
(the energy distribution in a continuum is continuous!)

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 7MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods . The Rayleigh-Ritz Method
•So, the Rayleigh-Ritz method is used by first finding an expression for the
potential energy of the discrete or continuous problem under investigation.
Then you plug into equation (19) and solve for u
•Below are some common expressions of potential energy found in structural
mechanics
2
0 2
L M dxV
EI= ∫
2
0 2
L S dxV
GA= ∫
2
0 2
L F dxV
EA= ∫
2
0 2
L T dxV
GJ= ∫
Symbols:M->Bending moment
S->Shear force
F->Tensile force
T->Torsion
A->Cross section area
E->Younng’s Modulus
G->Shear Modulus
{ε}->strain tensor in vector form*
{σ}->stress tensor in vector form*
A beam in bending A beam in shear A bar in tension A bar in torsion
{ } { }0 0 0
TW L T
dzdydxε σ∫ ∫ ∫
An elastic continuum*
* Here, second rank stress and strain tensors are expressed as vectors by
exploiting symmetry. This is often referred to as Voigt notation

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 8MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Rayleigh-Ritz Method
•Let’s try to reproduce Equation (8) – The equilibrium equations for a truss
element by using the Rayleigh-Ritz Method
•Start with the expression for potential energy in a bar (truss)2
0 2
L F dxV
EA= ∫
•Now, substitute the expressions for stress and strain (4a and 6a):
2
0 2
L
EAdudx
dxV
EA
= ∫
•Substitute your trial or shape functions*:
1 2
1
( ) 1n
i i
i
x xu x N u u u
L L=
= = − +
∑
*This is a major distinguishing feature of approximating energy methods. Instead of solving a
differential equation for u, we assume a polynomial solution a priori. This particular set of shape
functions happens to be the exact solution for the truss, but this is not a general requirement.

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 9MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Rayleigh-Ritz Method
•Apply Castigliano’s Theorem (19) to obtain:
•Now evaluate using:
2
1 21 2
0 2
L
N NEA u u dx
x xV
EA
∂ ∂ +
∂ ∂ = ∫
( ) ( )( )' ' ' '
1 1 1 1 2 2 10
1
LVEA N N u N N u dx F
u
∂= + =
∂ ∫
( ) ( )( )' ' ' '
2 1 1 2 2 2 20
2
LVEA N N u N N u dx F
u
∂= + =
∂ ∫
'
1
'
2
1
1
NL
NL
−=
=
•Making the substitution:
1 1
2 2
1 1
1 1
u FEA
u FL
− =
−

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 10MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Rayleigh-Ritz Method
•At this point, the student may not think anything has been gained (is the Rayleigh-
Ritz procedure really easier than the direct method?). However, we can omit
some steps if we observe that Castigiano’s Theorem always produces an equation
of the form*:
for one-dimensional elements, where C is the constitutive law, Ni, and Nj are
shape functions, and uj are the nodal coefficients
•This now provides a rule which can be easily (naively) used to generate algebraic
equations, which can then be solved numerically. Most importantly for us, it is
easily programmed
' '
1
n
i j j i
ji L
VN CN u F
u =
∂= =
∂∑∫ (20)
*Once again, note that there are no body loads in this formulation. Those must be
dealt with separately, or alternatively, one could use the Galerkin Method,
discussed next

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 11MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Rayleigh-Ritz Method
T
V
V∂= ⋅ ⋅ =
∂ ∫∆ C ∆ d Fu
•In the most general case – that of an elastic continuum, we start with a
full strain matrix, and so, for a given element, Castigliano’s Theorem has
the form*:
where, for 3 dimensional isotropic materials, B , C, u and F are given by*:
0 0
0 0
0 0
0
0
0
x
y
z
y x
z y
z x
∂ ∂
∂ ∂
∂ ∂
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂
u
v
w
x
y
z
F
F
F
C ∆∆∆∆ d F
1 0 0 0
1 0 0 0
1 0 0 0
0 0 0 (1 2 ) / 2 0 0(1 )(1 2 )
0 0 0 0 (1 2 ) / 2 0
0 0 0 0 0 (1 2 ) / 2
E
ν ν ν
ν ν ν
ν ν ν
νν ν
ν
ν
−
− −
++ − −
−
(21)
*Students should recognize this as a matrix version of equation (2) of lecture 4 after
substitution of the Generalized Hooke’s Law
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 12MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Galerkin Method
•As we’ve seen, the Rayleigh-Ritz Method provides a formula, or template, for
generating stiffness matrices. For structural problems, it will always work.
However, for other types of boundary value problems, we may not always be able
to generate a Lagrangian (L) with all the required mathematical properties to
satisfy equations (16) thru (18)
•For these types of problems, another type of approximate energy method is
available. This method is more general than the Rayleigh-Ritz Method and is
equivalent to it in such situations when a proper Lagrangian function CAN be
obtained. This method involves constructing the weak form of the governing
differential equation.
•Because of it’s broad applicability and popularity, we will discuss this method next.
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 13MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Galerkin Method
•Consider an arbitrary one-dimensional differential equation given by:
on x≤x≤L
Where u(p) stands for the pth derivative of u with respect to x, and C is a scalar
constitutive relation. Let’s assume the boundary conditions are u=0 at x=0, and
Cu(p/2)=F at x=L. The function b(x) may be considered a body load over L. Next,
multiply both sides by a trial function, w(x) which equals zero at essential boundary
conditions:
•Integrate over L:
( )( ) ( )
pCu x b x= −
( )( ) ( ) ( )
pCu x w x bw x= −
( )
0 0( ) ( ) ( ) ( )
L Lp
Cu x w x dx b x w x dx= −∫ ∫
(22)
(23)
•Equation (23) is the Weak Form of equation (22). Solving this equation instead of
(22) offers several advantages because it weakens the restrictions on admissible
solutions. In particular, the definite integral implies that solutions only have to
solve (22) in an average sense – smoothing over discontinuities and singularities.

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 14MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Galerkin Method
•Next, use integration by parts:
(24)
•But, by the Fundamental Theorem of Calculus, the first term above is just equal to
the surface loads or tractions (remembering that w=0 at x=0):
•Substitute (24) into (23):
•Finally, this leaves us with:
(25)
( ) dxuxwxuxwdx
ddxxwxu
ppp
p
pp )2/()2/()2/(
2/
2/)(
)()()()()( ∫∫∫ −=
( ) ∫ ∫∫ −=−L L
ppL
p
p
p
dxxwxbdxxuxCwdxxuxwdx
dC
0 0
)2/()2/(
0
)2/(
2/
2/
)()()()()()(
( ) FLwxuxCwdxxuxwdx
dC
Lp
Lp
p
p
)()()()()(0
)2/(
0
)2/(
2/
2/
==∫
∫∫ +=LL
pp FLwdxxwxbdxxuxCw00
)2/()2/()()()()()(

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin
( ) ( ) ( ) FLNdxuxbNdxuxCNuxN i
L
iij
p
j
n
j
L
i
p
i )(0
)2/(
10
)2/(+= ∫∑∫
=
15MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Galerkin Method
•For the discretized solution, we therefore substitute our chosen shape functions
for BOTH u and w:
Here, we go back to the notational shortcut, f(x) = f:
1
( ) ( )n
i i
i
u x N x u=
=∑
•In the Galerkin Method, the trial function, w is assumed to take the same form as
the solution, u
If there is no body load and (22) was a second order equation, we would have :
(26)
FLNdxbNdxuCNN i
L
ij
p
j
n
j
Lp
i )(0
)2/(
10
)2/( += ∫∑∫=
FLNdxuCNN ijj
n
j
L
i )('
10
' =∑∫=

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 16MAE 323 Lecture 5 Putting It All Together
Preliminaries: Energy Methods. The Galerkin Method
•Thus, we see that the Galerkin procedure does indeed produce algebraic systems
equivalent to the Rayleigh-Ritz Method (at least for first-order differential
equations in one dimension).
•However, note a subtle difference produced by our assumptions. Let’s put the two
equations side-by-side:
•The difference appears in the external force vector on the RHS. In the Rayleigh-Ritz
Method, we started out with the assumption that all external tractions occur as nodal
point loads (via Castigliano’s Theorem). This is one way in which the Galerkin form is
more general in that it can accommodate any force vector, F distributed anywhere
within the domain (not just at nodes)!
•Multiplying such a vector by the shape function automatically weights it (lumps it) at
nodes. This is convenient for higher order, or higher dimensional problems
' '
1
n
i j j i
ji L
VN CN u F
u =
∂= =
∂∑∫ Rayleigh-Ritz
GalerkinFLNdxuCNN ijj
n
j
L
i )('
10
' =∑∫=
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 17MAE 323 Lecture 5 Putting It All Together
A Quadratic Serendipity Plane Stress Rectangular Element
•In Chapter 2, we learned two different energy-based methods of:
1. Turning differential equations into integral (or energy)
equations
2. Using this form of the equations to generate discrete
approximations using shape functions
•In Chapter 3, we learned how certain shape functions may be derived
•In Chapter 4, we learned some basic results from elasticity theory.
Namely, the form of the stress equilibrium equation and how stress
relates to strain via some form of Hooke’s Law
•In This chapter, we’d like to put all these ideas together to see how the
finite element method is used in a continuum problem
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 18MAE 323 Lecture 5 Putting It All Together
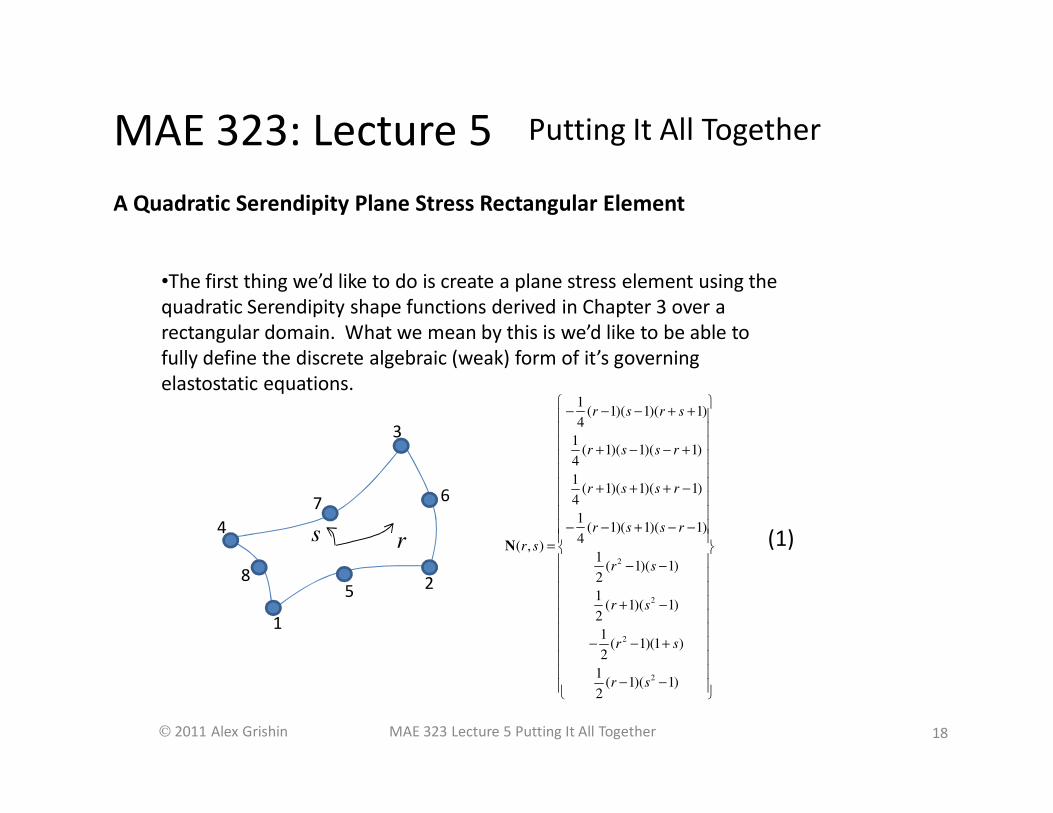
A Quadratic Serendipity Plane Stress Rectangular Element
•The first thing we’d like to do is create a plane stress element using the
quadratic Serendipity shape functions derived in Chapter 3 over a
rectangular domain. What we mean by this is we’d like to be able to
fully define the discrete algebraic (weak) form of it’s governing
elastostatic equations.
2
2
2
2
1( 1)( 1)( 1)
4
1( 1)( 1)( 1)
4
1( 1)( 1)( 1)
4
1( 1)( 1)( 1)
4( , )
1( 1)( 1)
2
1( 1)( 1)
2
1( 1)(1 )
2
1( 1)( 1)
2
r s r s
r s s r
r s s r
r s s r
r s
r s
r s
r s
r s
− − − + + + − − + + + + −
− − + − −
= − − + −
− − +
− −
N (1)
2
1
rs
3
4
5
67
8

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 19MAE 323 Lecture 5 Putting It All Together
•Formally, the way we’d do this is to start with the differential equation
(from Chapter 4 – remembering that the indices range over spatial
coordinates):
,0
ij j ibσ + =
•Then, using the Galerkin formulation*, we would multiply this with a
trial function. In this context, it would be a vector-valued trial function,
wi
*Alternatively, we could integrate the strain energy density and equate this to the work
done by external nodal forces (i.e. the Rayleigh-Ritz Method)
( ),0
ij j i ib wσ + =
•Then integrate over an element volume
( ),0
ij j i i
V
b w dVσ + =∫
A Quadratic Serendipity Plane Stress Rectangular Element

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 20MAE 323 Lecture 5 Putting It All Together
A Quadratic Serendipity Plane Stress Rectangular Element
•Now, we won’t go through the complete derivation because it involves
some mathematics most students haven’t seen yet (mostly concepts
from Advanced Calculus). This is only because we are now working in
two spatial dimensions. We will just give the resulting weak form:
ij ij i i i i
V V S
t dV t b w t F w dSσ δε = +∫ ∫ ∫
where: ( ), ,
1
2ij i j j i
w wδε = +(see chapter 4 for the
definition of strain)
•And t is the thru-thickness (normal to the plane) of the domain.
Now replace the stress and strain tensors with their vector
counterparts (as well as the forces), as we saw in Chapter 4, and let’s
assume a unit thickness for t:
T
V V S
dV w wdSδ = +∫ ∫ ∫σ ε b F (2)
Stress
vector
Strain
vector
Body Load
vector
External surface
load vector

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 21MAE 323 Lecture 5 Putting It All Together
•Now, recall that the Serendipity elements are isoparametric, which
means that if we are going to perform the integrals in (2), we need an
explicit mapping between the isoparametric coordinates and the global
coordinates
A Quadratic Serendipity Plane Stress Rectangular Element
rs
x
y
•For the strain matrix, this mapping is supplied
by the Jacobian of (x,y) with respect to (r,s):
x y
r r
x y
s s
∂ ∂ ∂ ∂
= ∂ ∂ ∂ ∂
J
such that:i ii
i ii
N NN x y
x xr r r
N NN x y
y ys ss
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
= = ∂ ∂∂ ∂ ∂
∂ ∂ ∂ ∂∂
J (3)
1
2
3
4
5
67
8
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 22MAE 323 Lecture 5 Putting It All Together
A Quadratic Serendipity Plane Stress Rectangular Element
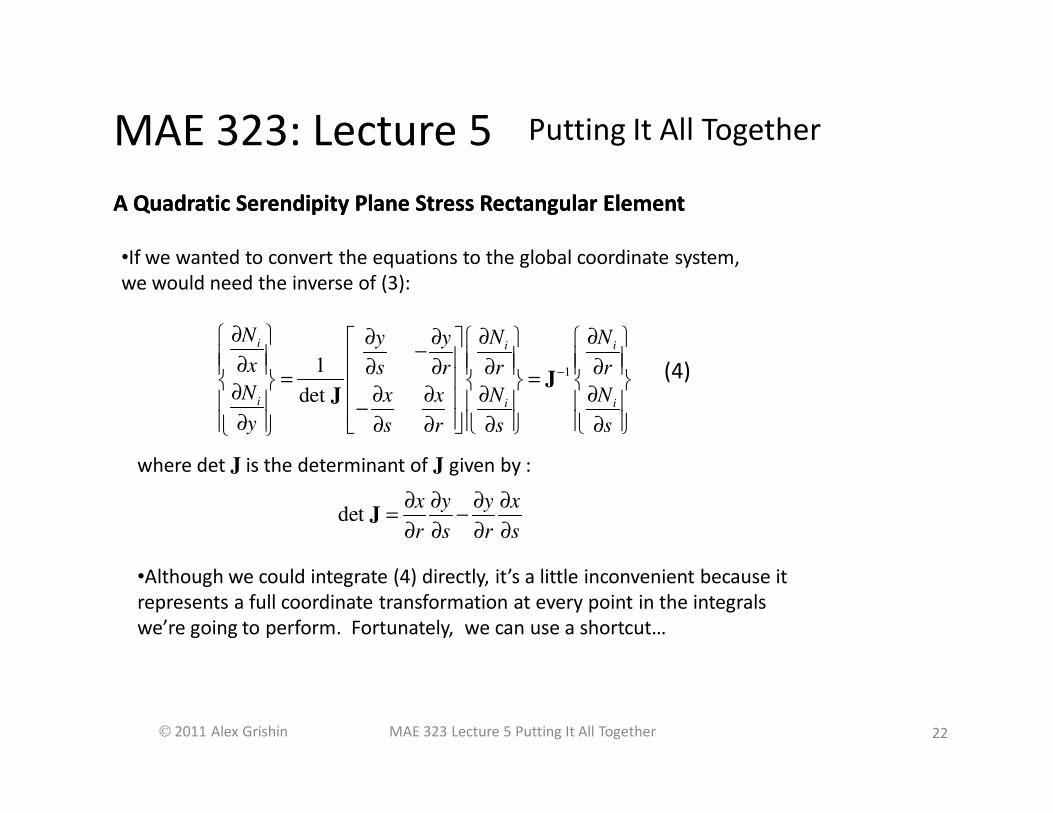
•If we wanted to convert the equations to the global coordinate system,
we would need the inverse of (3):
A Quadratic Serendipity Plane Stress Rectangular Element
where det J is the determinant of J given by :
11
det
i i i
i i i
N N Ny y
x s r r r
N x x N N
y s r s s
−
∂ ∂ ∂∂ ∂ − ∂ ∂ ∂ ∂ ∂
= = ∂ ∂ ∂ ∂ ∂ −
∂ ∂ ∂ ∂ ∂
JJ
det x y y x
r s r s
∂ ∂ ∂ ∂= −
∂ ∂ ∂ ∂J
(4)
•Although we could integrate (4) directly, it’s a little inconvenient because it
represents a full coordinate transformation at every point in the integrals
we’re going to perform. Fortunately, we can use a shortcut…
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 23MAE 323 Lecture 5 Putting It All Together
A Quadratic Serendipity Plane Stress Rectangular ElementA Quadratic Serendipity Plane Stress Rectangular Element
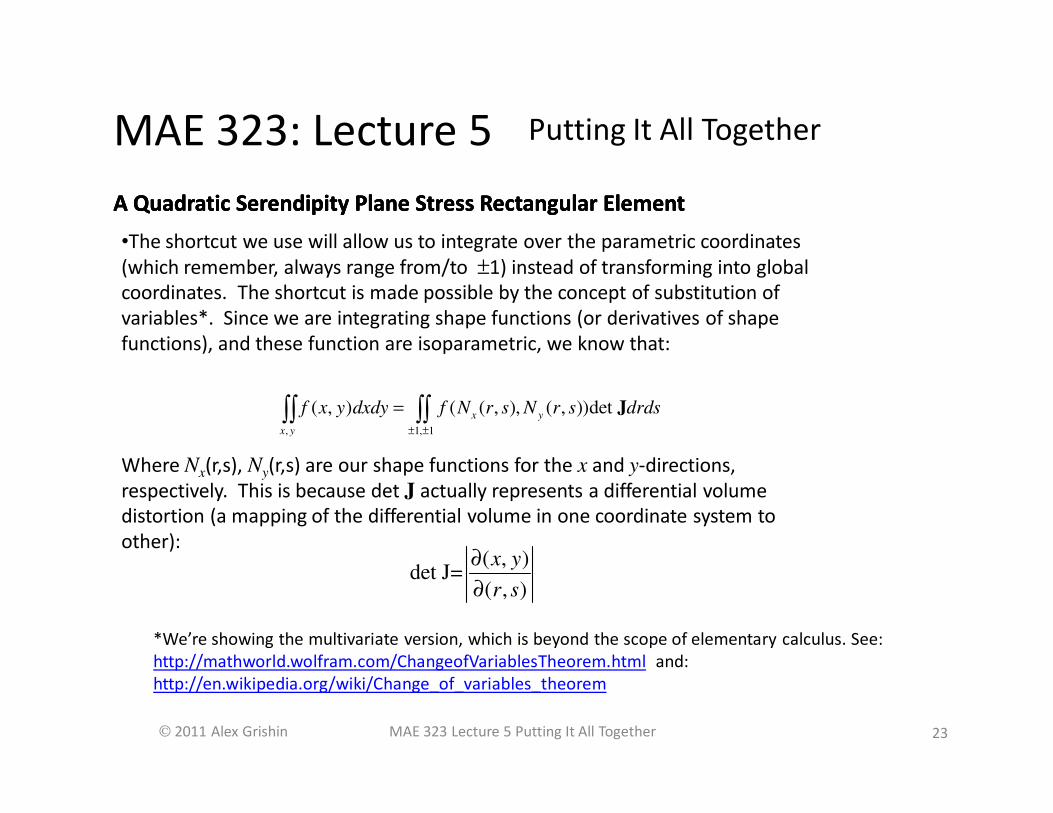
•The shortcut we use will allow us to integrate over the parametric coordinates
(which remember, always range from/to ±1) instead of transforming into global
coordinates. The shortcut is made possible by the concept of substitution of
variables*. Since we are integrating shape functions (or derivatives of shape
functions), and these function are isoparametric, we know that:
A Quadratic Serendipity Plane Stress Rectangular Element
Where Nx(r,s), Ny(r,s) are our shape functions for the x and y-directions,
respectively. This is because det J actually represents a differential volume
distortion (a mapping of the differential volume in one coordinate system to
other):
, 1, 1
( , ) ( ( , ), ( , ))det x y
x y
f x y dxdy f N r s N r s drds± ±
=∫∫ ∫∫ J
( , )det J=
( , )
x y
r s
∂
∂
*We’re showing the multivariate version, which is beyond the scope of elementary calculus. See:
http://mathworld.wolfram.com/ChangeofVariablesTheorem.html and:
http://en.wikipedia.org/wiki/Change_of_variables_theorem

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 24MAE 323 Lecture 5 Putting It All Together
•Now, returning to the governing equations:
A Quadratic Serendipity Plane Stress Rectangular Element
( )e e
e T e e
SV V
dV w wdSδ = +∫ ∫ ∫σ ε b F
•We are going to discretize this equation with our shape functions. We have
now attached a superscript e to all terms which will be evaluated on an element
basis. Before doing so, we make use of Hooke’s Law for an isotropic material to
convert the stress in the LHS to strain (we want the equation in terms of a single
primary unknown variable. In our case, this will be displacement):
( )e e
ee T e
SV V
dV wdV wdSδ = +∫ ∫ ∫ε C ε b F
•So, we need to write the strain vector in terms of shape functions. You already
got a hint of how we will do in this in Chapter 2. We’re going to write the strain
vector in term of a strain shape function matrix times displacement:
e e e e= ⋅ = ⋅ε B u ∆ d (6)
(5)

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 25MAE 323 Lecture 5 Putting It All Together
•B is the strain shape function matrix, and it is defined by:
•Where, ∆e is a strain operator. In the three dimensions, it is given as:
0 0
0 0
0 0
0
0
0
e
x
y
z
x y
z y
z x
∂ ∂
∂ ∂
∂ ∂
= ∂ ∂
∂ ∂
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂
∆
e
u
v
w
=
d
e e e= ⋅B ∆ N (7)
e
=
N 0 0
N 0 N 0
0 0 N
A Quadratic Serendipity Plane Stress Rectangular Element

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 26MAE 323 Lecture 5 Putting It All Together
•In two dimensions:
A Quadratic Serendipity Plane Stress Rectangular Element
u
v
=
d
0
0e
x
y
y x
∂ ∂
∂ = ∂
∂ ∂ ∂ ∂
∆
•Substituting in our shape functions and converting to parametric coordinates:
0
0e
r
s
s r
∂ ∂
∂ = ∂
∂ ∂ ∂ ∂
∆
1
1
( , )
( , )
n
i i
ie
n
i i
i
N r s u
N r s v
=
=
=
∑
∑d
e⋅
= = ⋅
N u N 0 ud
N v 0 N vOr
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 27MAE 323 Lecture 5 Putting It All Together
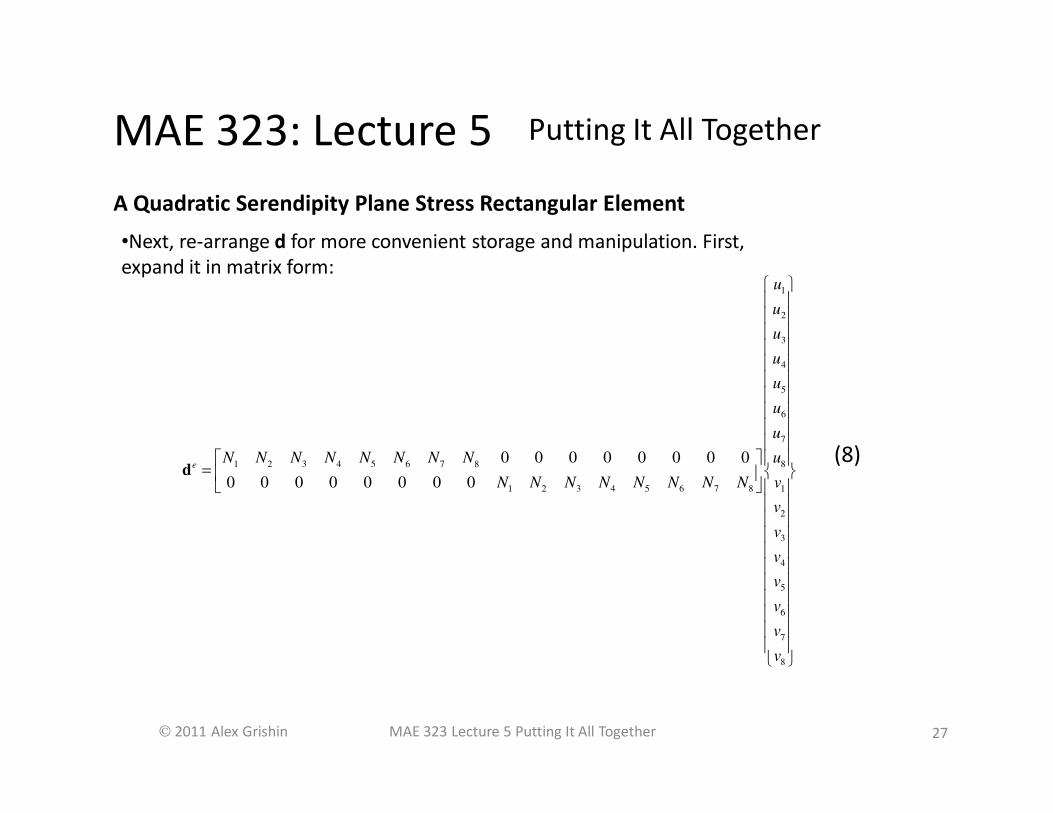
•Next, re-arrange d for more convenient storage and manipulation. First,
expand it in matrix form:
A Quadratic Serendipity Plane Stress Rectangular Element
1
2
3
4
5
6
7
1 2 3 4 5 6 7 8 8
1 2 3 4 5 6 7 8 1
2
3
4
5
6
7
8
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
e
u
u
u
u
u
u
u
N N N N N N N N u
N N N N N N N N v
v
v
v
v
v
v
v
=
d(8)
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 28MAE 323 Lecture 5 Putting It All Together
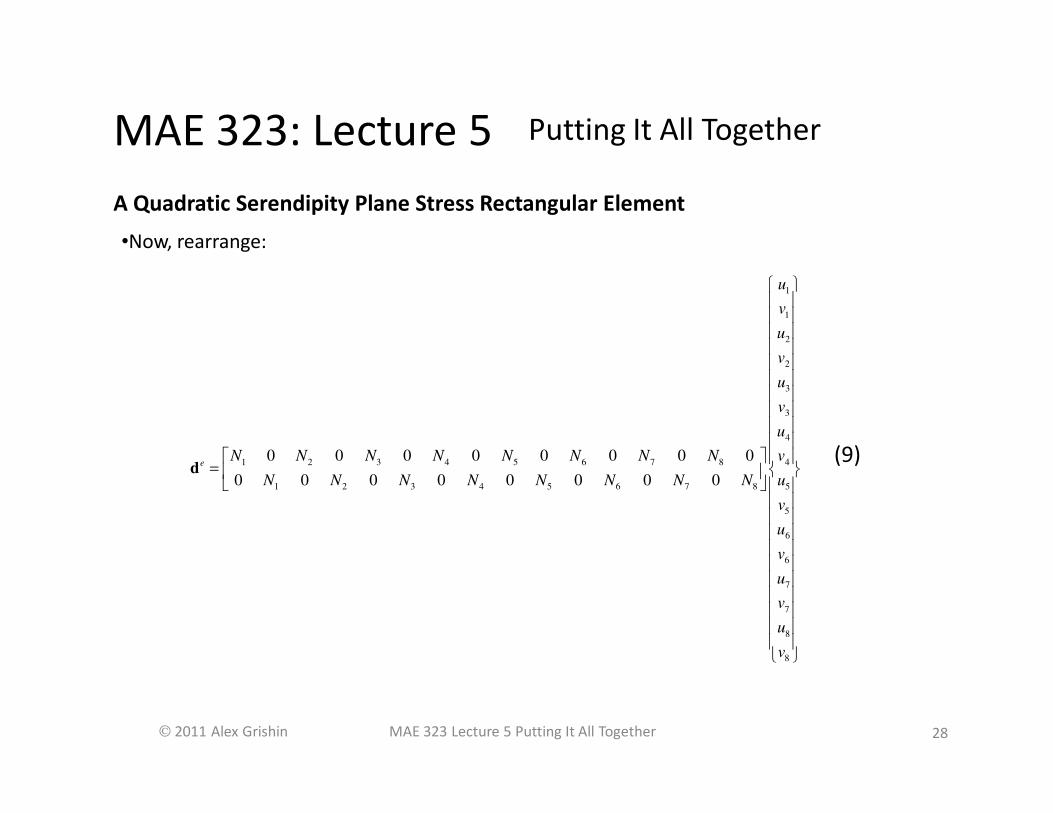
•Now, rearrange:
A Quadratic Serendipity Plane Stress Rectangular Element
1
1
2
2
3
3
4
1 2 3 4 5 6 7 8 4
1 2 3 4 5 6 7 8 5
5
6
6
7
7
8
8
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
e
u
v
u
v
u
v
u
N N N N N N N N v
N N N N N N N N u
v
u
v
u
v
u
v
=
d(9)
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 29MAE 323 Lecture 5 Putting It All Together
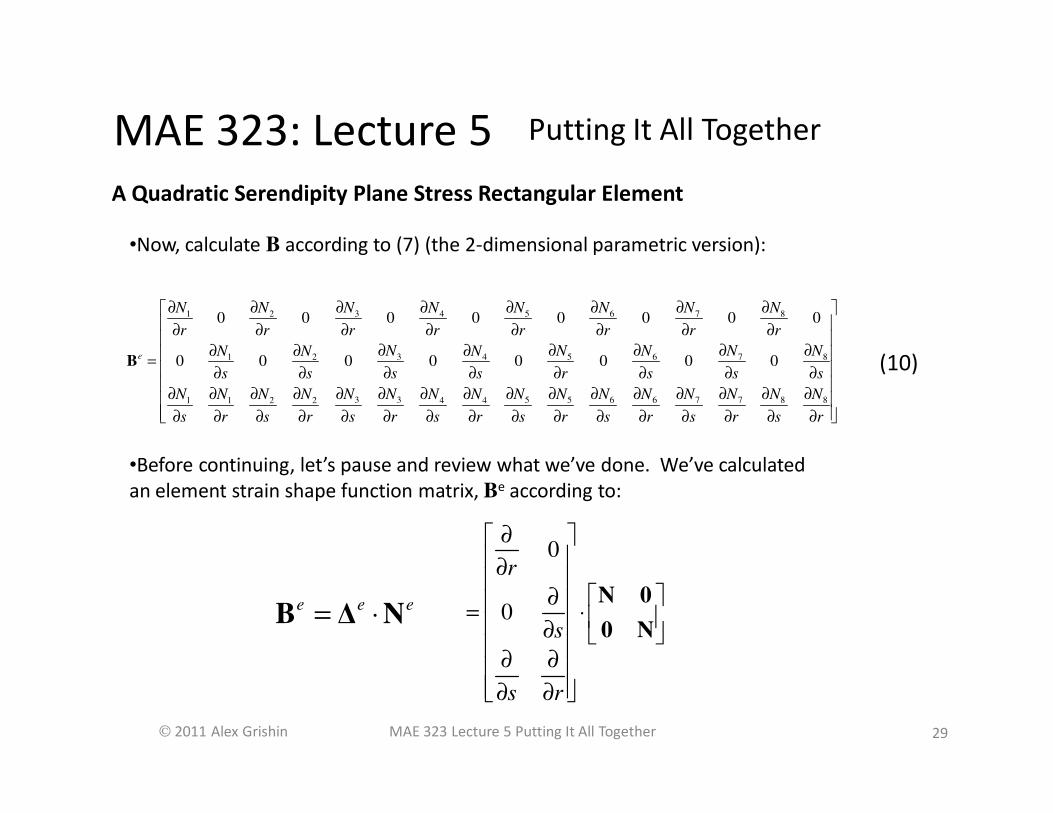
•Now, calculate B according to (7) (the 2-dimensional parametric version):
A Quadratic Serendipity Plane Stress Rectangular Element
3 5 6 7 81 2 4
3 5 6 7 81 2 4
3 3 5 5 6 6 7 7 8 81 1 2 2 4 4
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0e
N N N N NN N N
r r r r r r r r
N N N N NN N N
s s s s r s s s
N N N N N N N N N NN N N N N N
s r s r s r s r s r s r s r s r
∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂∂ ∂ ∂ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
B
•Before continuing, let’s pause and review what we’ve done. We’ve calculated
an element strain shape function matrix, Be according to:
e e e= ⋅B ∆ N
0
0
r
s
s r
∂ ∂
∂ = ⋅ ∂
∂ ∂ ∂ ∂
N 0
0 N
(10)

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 30MAE 323 Lecture 5 Putting It All Together
•So, we now have an expression of strain in terms of local parametric shape
functions:
A Quadratic Serendipity Plane Stress Rectangular Element
•So, let’s go back to equation (5) and plug in what we’ve got so far:
e e e e e e= ⋅ = ⋅ ⋅ε B u ∆ N u
0
0
r
s
s r
∂ ∂
∂ = ⋅ ⋅ ∂
∂ ∂ ∂ ∂
N 0 u
0 N v
( ) ( ) ( )( ) det det det e e
ee e T e e e e e e
s
SV V
dV dV dS⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ + ⋅ ⋅∫ ∫ ∫B u C B u J b N u J F N u J
( )e e
ee T e
SV V
dV wdV wdSδ = +∫ ∫ ∫ε C ε b F
(11)
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 31MAE 323 Lecture 5 Putting It All Together
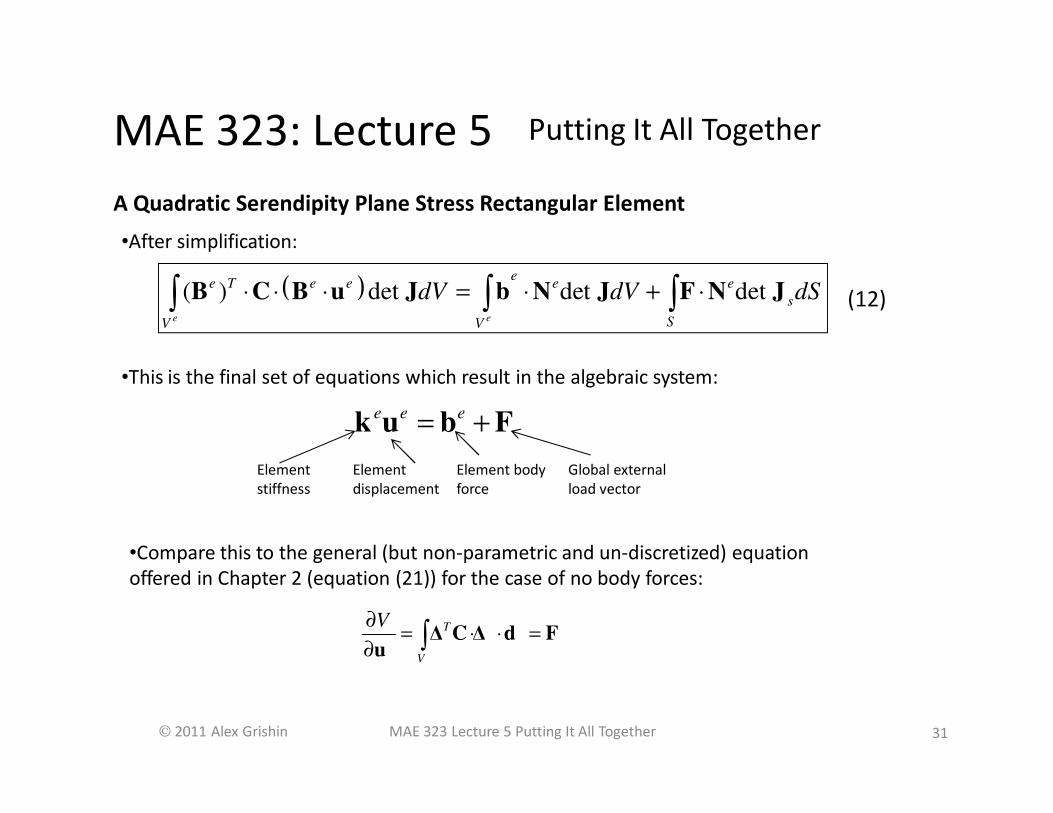
•After simplification:
A Quadratic Serendipity Plane Stress Rectangular Element
( )( ) det det det e e
ee T e e e e
s
SV V
dV dV dS⋅ ⋅ ⋅ = ⋅ + ⋅∫ ∫ ∫B C B u J b N J F N J
•This is the final set of equations which result in the algebraic system:
e e e= +k u b F
Element
stiffness
Element
displacement
Element body
force
Global external
load vector
•Compare this to the general (but non-parametric and un-discretized) equation
offered in Chapter 2 (equation (21)) for the case of no body forces:
T
V
V∂= ⋅ ⋅ =
∂ ∫∆ C ∆ d Fu
(12)
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 32MAE 323 Lecture 5 Putting It All Together
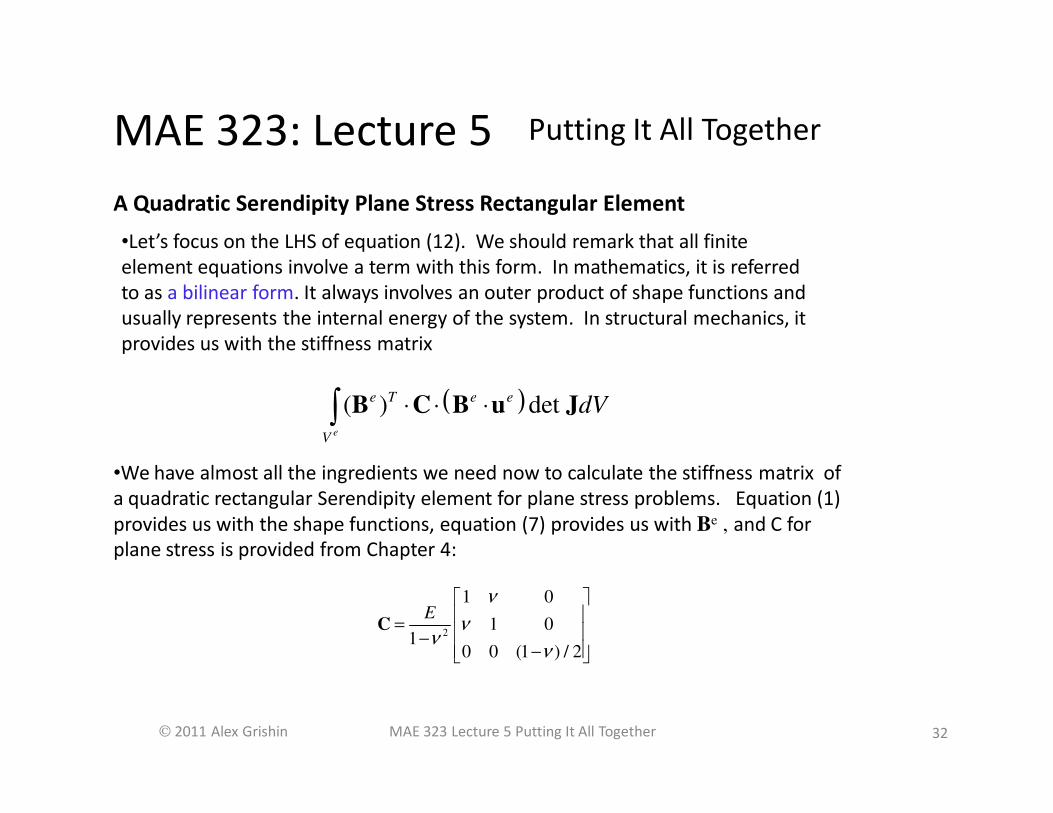
•Let’s focus on the LHS of equation (12). We should remark that all finite
element equations involve a term with this form. In mathematics, it is referred
to as a bilinear form. It always involves an outer product of shape functions and
usually represents the internal energy of the system. In structural mechanics, it
provides us with the stiffness matrix
A Quadratic Serendipity Plane Stress Rectangular Element
( )( ) det e
e T e e
V
dV⋅ ⋅ ⋅∫ B C B u J
•We have almost all the ingredients we need now to calculate the stiffness matrix of
a quadratic rectangular Serendipity element for plane stress problems. Equation (1)
provides us with the shape functions, equation (7) provides us with Be , and C for
plane stress is provided from Chapter 4:
2
1 0
1 01
0 0 (1 ) / 2
Eν
νν
ν
= − −
C

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 33MAE 323 Lecture 5 Putting It All Together
•There’s still one thing missing! How do we calculate the integral over the
domain shown below?
A Quadratic Serendipity Plane Stress Rectangular Element
( )( ) det e
e T e e
V
dV⋅ ⋅ ⋅∫ B C B u J
•This actually can be done analytically. Either manually or with a Computer Algebra
System (CAS). However, both techniques are too slow in general. What is needed is
a very accurate and robust (easily programmed and widely applicable) method of
doing this – even if it’s still only approximate.
•Historically, the method almost universally adopted is called Gaussian Quadrature,
which tends to give very good results for the integrals of smooth (or piecewise
smooth) functions
rs

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 34MAE 323 Lecture 5 Putting It All Together
•Gaussian Quadrature (sometimes called Legendre-Gauss Quadrature*) works
by sampling the integrand at points prescribed over the domain by the
quadrature rule. These points are then weighted and summed, producing the
an approximation of the integral.
A Quadratic Serendipity Plane Stress Rectangular Element
Gaussian Quadrature
( ) ( )1 1
( ) det ( , ) ( , ) det ( , )e
n nT
e T e e e e
i j i j i j i j
i jV
dV r s r s r s w w= =
⋅ ⋅ ⋅ ≈ ⋅ ⋅∑∑∫ B C B u J B C B J
•The two-dimensional quadrature rule is generated by taking the outer product of
one-dimensional rules. Thus, if a three-point rule is used, the one dimension
locations, ri and corresponding weights, wi are found (looked up from a table or
calculated). The two dimensional points and weights are then found by the taking
the outer product of each (thus a three point rule results in nine points in two
dimensions, and 27 points in three dimensions).
*http://mathworld.wolfram.com/Legendre-GaussQuadrature.html

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 35MAE 323 Lecture 5 Putting It All Together
r
s
•Quadrature points are usually given on the interval -1<ri<1, and so this is
another convenience provided by the isoparametric coordinates
•Below the coordinates for a two-point rule are shown
A Quadratic Serendipity Plane Stress Rectangular Element
Gaussian Quadrature
s
r
1/ 3s =
1/ 3s = −
1/ 3r = − 1/ 3r =

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 36MAE 323 Lecture 5 Putting It All Together
rs
•Below are the points for a three-point quadrature
A Quadratic Serendipity Plane Stress Rectangular Element
Gaussian Quadrature
s
r
s
s
r=0.0
s
3 / 5s =
3 / 5s = −
3 / 5r =3 / 5r = −

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 37MAE 323 Lecture 5 Putting It All Together
•Below is a table of quadrature points and corresponding weights 2-point and 3-
point quadrature
A Quadratic Serendipity Plane Stress Rectangular Element
Gaussian Quadrature
Point Locations Weights
2 -0.5773503 1.0000000
0.5773503 1.0000000
3 -0.7745967 0.5555556
0.0000000 0.8888889
0.7745967 0.5555556
•So, how do we know how many points to use when we integrate using
Gaussian Quadrature? The rules are derived (in one dimension) so as to
integrate all polynomials up to degree 2m-1 exactly, where m is the number of
points used in the quadrature! So, in principle, a 2-point rule would integrate
2nd and 3rd degree functions exactly.
1/ 3−
1/ 3
3 / 5−0
3 / 5
1
1
5 / 9
8 / 9
5 / 9
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 38MAE 323 Lecture 5 Putting It All Together
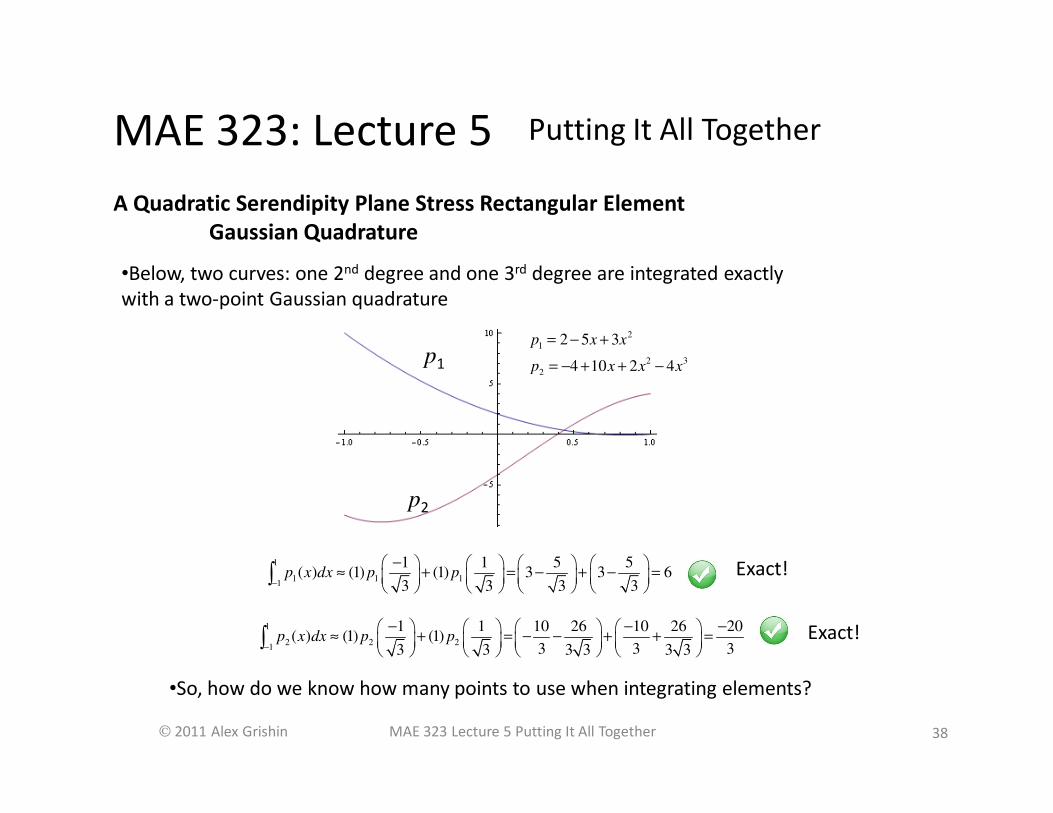
•Below, two curves: one 2nd degree and one 3rd degree are integrated exactly
with a two-point Gaussian quadrature
A Quadratic Serendipity Plane Stress Rectangular Element
Gaussian Quadrature
•So, how do we know how many points to use when integrating elements?
p1
p2
2
1
2 3
2
2 5 3
4 10 2 4
p x x
p x x x
= − +
= − + + −
1
1 1 11
1 1( ) (1) (1) 3 3 6
3 3 3
5 5
3p x dx p p
−
− ≈ + = − + − =
∫
1
2 2 21
1 1 10 10 20( ) (1) (1)
3 3 33 3 3
26
3 3
26
3p x dx p p
−
− − − ≈ + = − − + + =
∫
Exact!
Exact!
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 39MAE 323 Lecture 5 Putting It All Together
•The guideline for exact integration is usually not followed in finite elements.
One reason is that for 2nd and 3rd degree shape functions, the preceding
formula would only be reliable if the sides of the rectangle were straight (if the
mid-side nodes lay on a straight line connecting corner nodes). When this is not
the case, we have a Jacobian with different values at all points within the
domain – this introduces error into the integral. Other reasons have to do with
mesh instabilities (which we’ll discuss later) and matrix assembly efficiency.
•In practice, a two-point quadrature rule is usually used for linear elements,
whereas a three-point rule is frequently used for quadratic elements.
A Quadratic Serendipity Plane Stress Rectangular Element
Gaussian Quadrature

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 40MAE 323 Lecture 5 Putting It All Together
Part II:
Element Shape Quality
Metrics
Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 41MAE 323 Lecture 5 Putting It All Together
•Element Distortion
•Whether creating a finite element mesh manually or using an automated program,
domain geometries which depart radically from the underlying element parent shape will
invariably lead to distorted elements (elements which themselves depart from their
parent shapes). This, in turn may lead to solution errors. The main reason for this lies in
the fact that the matrices for such elements become ill-conditioned. There are several
measures of element distortion. Some of the more common ones are:
•Aspect Ratio: A direct measure of departure from parent shape
•Angle Deviation: For quadrilateral and hexahedral elements. Measures
departure from 90 degree angle
•Parallel Deviation : Quadrilaterals and hexahedra only (dot product
between opposite edges calculated - must be close to zero)
•Maximum Corner Angle: For triangles, best possible max. angle in 60
degrees. For quadrilaterals, it’s 90 degrees.
•Jacobian Ratio: Jacobians determinants calculated at Gauss points,
corner nodes and centroid
•Warping Factor: A measure of twist for shell elements, but also for
solids

Putting It All TogetherMAE 323: Lecture 5
2011 Alex Grishin 42MAE 323 Lecture 5 Putting It All Together
•Element Distortion
•The metric outlined in the previous slide are all used by ANSYS.
A description of how the code implements these metrics (as well
as explanations of the metrics themselves) can be found in the
ANSYS help documentation under Mechanical APDL->Theory
Reference->13. Element Shape Testing