Embed Size (px)
Citation preview

Universidad Nacional de San Juan
Facultad de Ingeniería
Departamento de Electrónica, Automática y Bioingeniería
Carrera de Bioingeniería
Asignatura “Biomecánica”
Unidad Nº 2: “Biomecánica Postural”
Parte 1: Análisis geométrico de la postura
Dra. Ing. Silvia E. Rodrigo
2018
UNIDAD 2: BIOMECÁNICA POSTURAL
• Análisis de la postura corporal desde el punto de vista geométrico y cinético.
Conceptos de estabilidad, balance y equilibrio. Biomecánica de las posturas de
bipedestación y sedestación. Aplicación a la Ergonomía.

¿Cómo se describe la postura y el movimiento humano?
Mencionamos que desde el punto de vista de la mecánica de cuerpos
rígidos, el sistema motor humano es una estructura compuesta por un
sistema de palancas articuladas sobre el que actúan fuerzas de tracción
controladas y reguladas por el sistema nervioso, posibilitando que el
cuerpo humano adopte diferentes posturas y realice distintos
movimientos o actividades.

En mecánica, este sistema de palancas articuladas es equivalente a una cadena cinemática
(cuerpos rígidos vinculados por juntas cinemáticas), en donde cada cuerpo rígido representa un
segmento corporal y las juntas cinemáticas simbolizan a las articulaciones anatómicas que los
vinculan. Esto permite describir la postura relativa o el movimiento relativo entre segmentos
corporales contiguos (p. e., los tres segmentos de la extremidad superior o inferior). Este sistema
también puede representar a un manipulador robótico o a un sistema exoesquelético.

Video 2

• Las cadenas cinemáticas pueden ser de lazo abierto o de lazo cerrado.
• Dependiendo de si la cadena cinemática es de lazo abierto o cerrado, serán los grados de
libertad del sistema.
Cadenas cinemática durante las actividades del cuerpo humano. La figura izquierda muestra una cadena
abierta y las cadenas cerradas ABCDEA y dff1d1. La figura derecha muestra un movimiento de una cadena
cerrada. En una cadena cerrada, los movimientos angulares de las articulaciones están acoplados.

• Punto en 2D: 2 GDL Punto en 3D: 3 GDL
• Cuerpo rígido libre en 2D: 3 GDL Cuerpo rígido libre en 3D: 6 GDL
• Sistema de N cuerpos rígidos en 2D sin restricciones: 3N GDL
• Sistema articulado de N cuerpos rígidos en 3D sin restricciones: 6N GDL
• Sistema articulado de N cuerpos rígidos en 3D con m restricciones: (6N – m) GDL
• El número total de GDL y el tipo de cadena cinemática (abierta o cerrada) define
su movilidad.
Grados de libertad (GDL) en 2D y 3D

Cadena cinemática representada por un sistema de 3 cuerpos rígidos vinculados por juntas cinemáticas
rotacionales. A: en una cadena cinemática abierta, si cada cuerpo tiene 1 grado de libertad (GDL), el
sistema tiene un total de 3 GDL. B: cuando el punto P está rígidamente ligado al suelo, el sistema se
comporta como un mecanismo de 4 cuerpos rígidos que tiene un 1 GDL.

Grados de libertad de la cadena cinemática representada por el cuerpo humano completo.
Mencionamos también que lo que permite que el cuerpo humano adquiera distintas
posturas y realice distintas actividades es el movimiento articular.

Articulación Tipo de Movimiento Representación Rotación (grados)
Rodilla Flexión
125
Flexión
102
Hiperextensión
45
Cadera
Abducción/Aducción
53/31
Excursión angular de las articulaciones de la extremidad inferior
¿cómo se relaciona
la movilidad
articular con los
GDL mencionados
anteriormente?

Articulación Tipo de Movimiento Representación Rotación (grados)
Rotación Medial/Lateral
39/34
Flexión/Dorsiflexión
20/35
Tobillo Inversión/Eversión
35/25
Abducción/Aducción
5/5
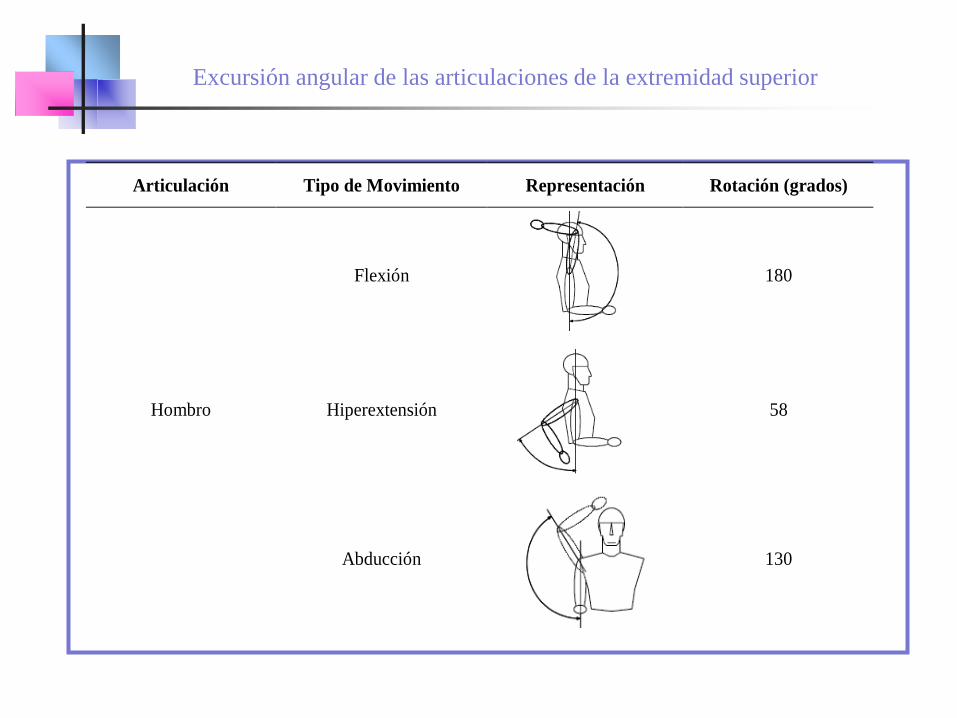
Articulación Tipo de Movimiento Representación Rotación (grados)
Flexión
180
Hombro Hiperextensión
58
Abducción
130
Excursión angular de las articulaciones de la extremidad superior

Articulación Tipo de Movimiento Representación Rotación (grados)
Codo
Flexión
141
Pronación/Supinación
90/90
Flexión/Extensión
70
Muñeca
Hiperextensión
30

A partir de la consideración del cuerpo humano (completo o una extremidad)
como una cadena cinemática, describimos en el espacio 2D o 3D la postura o el
movimiento corporal, utilizando:
• sistema de ejes coordenados coincidente con los ejes anatómicos,
• planos de referencia (sagital, frontal y transversal),
• posición de partida o neutra (bipedestación).

PLANO TRANVERSAL (ROTACIÓN INTERNA -
EXTERNA)
PLANO SAGITAL (FLEXIÓN - EXTENSIÓN)
EJE ANTEROPOSTERIOR
EJE MEDIOLATERAL
EJE LONGITUDINAL
PLANO FRONTAL (ABDUCCIÓN - ADUCCIÓN)
La postura y el movimiento articular
proyectado en estos planos de
referencia se descompone en:
- flexo-extensión (plano sagital),
- abducción-aducción (p. frontal),
- rotación interna-externa (p. horizontal).

Desde el punto de vista geométrico, la postura se define como la disposición
espacial (posición relativa) de todos los segmentos corporales entre sí.
Existen dos tipos de postura: estática y dinámica.
La postura estática es aquella en la que se mantienen los ángulos relativos entre
los distintos segmentos corporales.
La postura dinámica es la composición alternada y secuencial de distintas
posturas estáticas.
Concepto geométrico de postura corporal
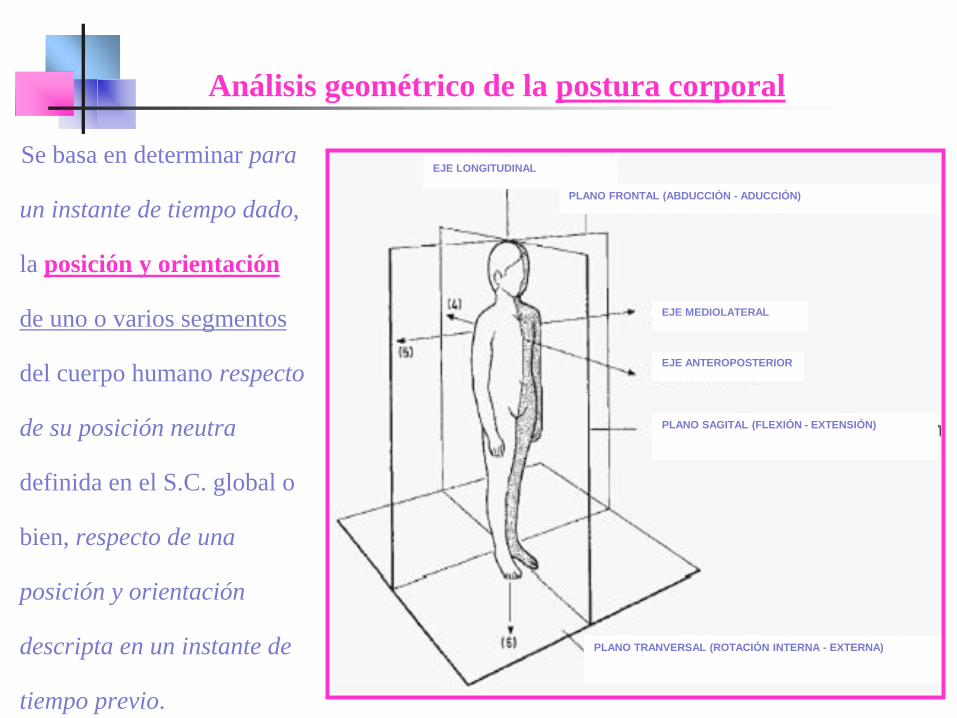
Se basa en determinar para
un instante de tiempo dado,
la posición y orientación
de uno o varios segmentos
del cuerpo humano respecto
de su posición neutra
definida en el S.C. global o
bien, respecto de una
posición y orientación
descripta en un instante de
tiempo previo.
PLANO TRANVERSAL (ROTACIÓN INTERNA - EXTERNA)
PLANO SAGITAL (FLEXIÓN - EXTENSIÓN)
EJE LONGITUDINAL
PLANO FRONTAL (ABDUCCIÓN - ADUCCIÓN)
EJE ANTEROPOSTERIOR
EJE MEDIOLATERAL
Análisis geométrico de la postura corporal

Para describir posturas del cuerpo humano en el plano (2D) o en el espacio (3D),
se realizan las siguientes consideraciones:
1) se utiliza un sistema de coordenadas global (SCG) fijo en el espacio para
describir la posición y orientación absolutas de uno o más segmentos anatómicos,
2) por cada segmento anatómico o articulación, se emplea un sistema de
coordenadas local (SCL), que se mueve o rota solidario con el segmento (centro de
masa del segmento) o articulación (centro articular), y que permite describir la
posición y/o rotación de un punto que pertenezca al segmento o articulación.

3) Para describir la posición y/u orientación absolutas de un segmento o articulación
respecto del S. C. global, se determina el cambio en posición y/o el cambio en
rotación del S.C. local respecto de la posición neutra en el S. C. global;
4) Para describir la posición y/u orientación relativas de un segmento o articulación 2
respecto de otro segmento o articulación 1 contiguo, se determina el cambio en
posición y/o cambio en rotación del S. C. local 2 respecto del S. C. local 1.

X Z
Y
Según el caso, entre
segmentos anatómicos
contiguos puede existir
un cambio de posición,
de orientación o bien, de
posición y orientación
en forma simultánea.
Sistemas de Coordenadas locales
Sistema de
Coordenadas
Global
¿Qué opciones existen para describir la
traslación y rotación final de la tibia en
2 respecto de su posición inicial en 1?
y’
z’
z’’
x’’
y’’
x’
Posición y orientación en 2D para extremidad inferior
1
2
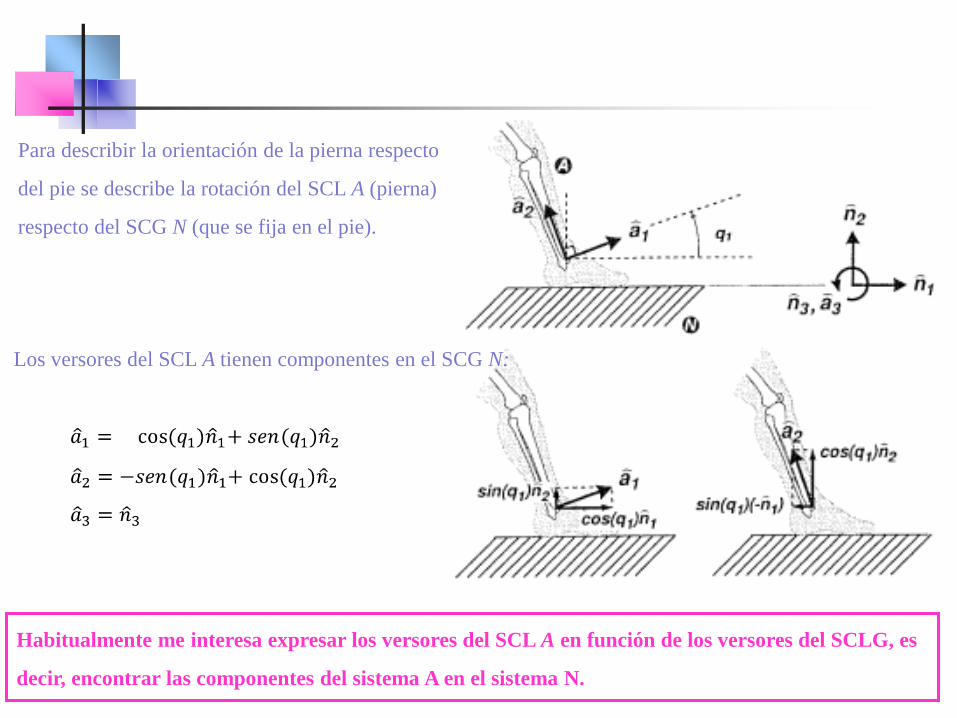
Para describir la orientación de la pierna respecto
del pie se describe la rotación del SCL A (pierna)
respecto del SCG N (que se fija en el pie).
Habitualmente me interesa expresar los versores del SCL A en función de los versores del SCLG, es
decir, encontrar las componentes del sistema A en el sistema N.
Los versores del SCL A tienen componentes en el SCG N:

La tabla de cosenos directores define en el SCG N, las componentes n1, n2 y n3 de los versores a1, a2 y a3
del SCL A, y viceversa. Dado que ambos conjuntos de versores son ortonormales, la tabla o matriz N[R]A
de cosenos directores también es ortonormal.
^ ^ ^ ^ ^ ^
- ¿Cuántos grados de libertad tiene el sistema?
- ¿Sobre qué eje rota la articulación del tobillo?

Para analizar el movimiento absoluto y relativo de los tres segmentos de la extremidad inferior
(considerados como una cadena cinemática cerrada cuando el pie está apoyado sobre el suelo), se asocia
un SCL a cada segmento (A, B y C), ubicando en este caso, su origen de coordenadas en el centro de masa
de cada segmento.
Versores asociados al SCG (N) fijo en el suelo y a los SCL (A, B y C) vinculados a los segmentos muslo, pierna y pie,
que describen la postura de la extremidad inferior en dos instantes de tiempo consecutivos.

Versores asociados al SCG (N) fijo en el suelo
y a los SCL (A y B) vinculados a las
articulaciones de tobillo y rodilla, utilizados
para obtener los cosenos directores entre N y
A, entre A y B y entre N y B.
En este otro caso, los SCL A y B están asociados a las articulaciones de
tobillo y rodilla. Para describir la posición de la rodilla en el SCG N,
describo primero la postura relativa entre la rodilla y el tobillo
(obteniendo las componentes de los versores del SCL B en el SCL A) y
luego expreso estas componentes en el SCG N.

Obtengo la rotación compuesta entre N y B según el procedimiento anterior:
1°) Describo las componentes del SCL B en el SCG A
3°) Describo las comp. del SCL B (expresadas en SCL A), en el SCG N
Por lo tanto, la tabla de cosenos directores entre N y B se expresa como:
2°) Describo las componentes del SCL A en el SCG N

4°) Para describir la rotación externa-interna de la cadera (alrededor del eje vertical), aplico el mismo
procedimiento anterior, describiendo primero la rotación relativa entre la cadera y la rodilla, es decir,
obtengo en el SCL B las componentes de los versores del SCL C.
5°) Expreso ahora estos versores del SCL B (expresados antes
en el SCL A) en el SCG N, según lo obtenido en el 3° paso
Describo ahora la rotación de la cadera en el SCG N
Sobre qué eje rota la cadera?

Reordenando, obtengo finalmente las coordenadas del SCL C en el SCG N, que se expresan como:
equivalente al producto de matrices:
N

Dos propiedades muy útiles de las matrices de rotación ortonormales consideradas, son:
La matriz de rotación de B a A (BRA), se determina fácilmente a través de la traspuesta de ARB:
BRA=(ARB)T
La inversa de una matriz ortonormal es también su transpuesta:
(ARB)-1= (ARB)T

La posición y
orientación inicial (1) de
un punto P en el brazo
se describe a partir del
vector posición r0’ del
origen del SCL asociado
al brazo respecto del SCG
en el torso, y de la
rotación del SCL respecto
del SCG multiplicado por
el vector posición r’ de P
en el SCL.
Posición y orientación en 2D para extremidad superior
r´ rr 1R' 01
O`
O``
O X
Y
x`
r 0 `
r 2
P
P
p
r 1
p
y``
x``
r 0 ``
x`
y`
θ ̀ `
X
Y
θ ̀
y`
O X
Y
x`
r 0 ´
r2
P
r´
r1
x´´ y`
P y´´
r´´ r ́´ 0
1
2
1
2 Denominamos
al ángulo que
describe el SCL
respecto del SCG
Brazo en la posición 2
Brazo en la posición 1
Torso (se fija el SCG)

La posición y orientación final (2) del punto P en el brazo se describe a partir del
desplazamiento de P respecto de la posición inicial (1) y de la rotación entre los sistemas de
coordenadas global (torso) y local (brazo).
r´ rr
r´ rr
2
1
R''
R'
02
01
¿Cuánto valen θ1 y θ2?
¿Qué características tiene el vector
r´ que describe a P en el SCL?
O`
O``
O X
Y
x`
r 0 ̀
r 2
P
P
p
r 1
p
y``
x``
r 0 ̀
`
x`
y`
θ ̀ `
X
Y
θ ̀
y`
O X
Y
x`
r 0 ´
r2
P
r´
r1
x´´ y`
P y´´
r´´ r ́´ 0
1
2
1
2
Brazo en la posición 2
Brazo en la posición 1
Torso (se fija el SCG)

La figura representa la postura de un manipulador robótico o una extremidad superior en reposo,
caracterizado por una cadena cinemática abierta de 2 eslabones de longitudes l1, y l2, que forman
ángulos α1 (entre el eje X0 y el eslabón l1) y α2 (entre los eslabones l1 y l2). Describir la posición del
punto extremo P en el sistema de coordenadas global X0-Y0 a partir de:
las proyecciones de los eslabones o segmentos sobre los ejes X0 e Y0,
la postura o posición relativa entre los eslabones o segmentos contiguos.
a1
P
X0
Y0
l 1
l 2 a2
Ejemplo: postura en un instante de tiempo determinado,
de un manipulador de 2 segmentos
Denominamos a al ángulo que
describe el SCL2 respecto del
SCL1 (el caso de a 2), o bien al
ángulo que describe el SCL 1
respecto del SCG (el caso de a 1)

Obtengo las coordenadas (X1, Y1) y (XP , YP) de los puntos 1 y P, respectivamente, a partir de
las proyecciones de los eslabones sobre los ejes X0 e Y0:
x1 = l1 cos (a1) xP = l1 cos (a1) + l2 cos (a1+ a2)
y2 = l1 sen (a1) yP = l1 sen (a1) + l2 sen (a1+ a2)
a1
P
X0
Y0
l1
l2
a2
1
Proyecciones de los eslabones o segmentos sobre los ejes X0 e Y0
Denominamos al ángulo que
describen los sistemas de
coordenadas locales (SCL 1 y
SCL2) respecto del SCG. Es
decir, 1= a 1 y 2= a1 + a2.

1) Utilizo la expresión genérica:
2) Defino los SCL 1 y 2 (en la dirección del eje del eslabón respectivo y en su dirección perpendicular)
y describo la rotación del SCL 2 respecto del SCL 1 a partir de la matriz de rotación ARB y la rotación
del SCL 1 respecto del SCG a partir de la matriz de rotación NRA :
Coordenadas (XP , YP) de P a partir de la posición relativa entre eslabones o segmentos contiguos:
a1
P
X0
Y0
l1
l2
a2
x1
y1
â2
â1
x2 b1
^
b2
^
y2
PL0GPG r rr aR
1
Postura o posición relativa entre los eslabones o segmentos contiguos

3) Describo la posición del punto P en el SCL 1 a partir de la matriz de rotación ARB:
a1
P
X0
Y0
l1
l2
a2
x1
y1
â2
â1
x2 b1
^
b2
^
y2
4) Describo la posición del punto P en el SCG a partir de la matriz de rotación NRA:

5) Realizo el producto de matrices:
a1
P
X0
Y0
l1
l2
a2
x1
y1
â2
â1
x2 b1 ^
b2 ^
y2
6) Utilizo las identidades trigonométricas:
Resultando:
que es equivalente a las coordenadas (xP, yP) obtenidas en el SCG.

Ejemplo: cambio de postura de una cadena cinemática
a1
P´
X0
Y0
a2
x1´
y1´
â2
â1
x2 b1
^
b2
^ y2
P´´
y1´´ x1´´
y2´´
x2´´
Que es equivalente a: 𝑥𝑃𝑦𝑃
=𝑙1 cos 𝜃1 + 𝑙2cos𝜃2𝑙1 sen 𝜃1 + 𝑙2sen𝜃2
, siendo 1=a1 y 2= a1+ a2
Para cada postura analizada se aplica la expresión genérica:
𝑥𝑃𝑦𝑃
=𝑙1 cosa1 + 𝑙2cos(a1 + a2)𝑙1 sena1 + 𝑙2sen(a1 + a2)

Si l1=10, l2=7, a1=[0, /2] y a 2=[0, /2], mediante Matlab se logra obtener la sucesión de
posiciones y orientaciones de los segmentos 1 y 2 del manipulador:
l1
l1
l2
l2 Pf´
Pf´´
Pf´´´
P1´
P1´´
P1´´´
P1 y Pf describen los puntos
extremos de los segmentos 1 y 2