Embed Size (px)
Citation preview

Sebenta de Física I Capítulo V – Cinemática
1. Objectivo fundamental da cinemática
A cinemática (termo que deriva do grego “kinema” que quer dizer movimento) é um dosvários ramos da Mecânica, cujo objectivo é o de estudar o movimento. A cinemática não oexplica, apenas o descreve. Como? Recorrendo à selecção de um referencial apropriadoregista, matematicamente, as sucessivas posições que o objecto em estudo ocupa ao longo dotempo. Ora isto não é mais do que conhecer a posição que num determinado instante de tempoo corpo irá ocupar desde que se conheçam as características actuais do movimento dessecorpo.
2. Descrição do movimento de uma partícula material
Para caracterizar o movimento de uma partícula (móvel de dimensões desprezáveis faceás dimensões da trajectória) requere-se o uso de um referencial, relativamente ao qual sedescreve a posição da partícula ao longo do tempo. Este referencial (de eixos perpendicularesentre si) é ortonormado e de base .,, kji
Na figura 1 encontram-se representados os vectores posição 21, rr
da partícula em doisinstantes de tempos (t1, t2). Matematicamente, e como já sabemos da análise vectorial,podemos escrever:
krjrirrrrr zyxzyx
1111111 ++=++= (1)
krjrirrrrr zyxzyx
2222222 ++=++= (2)
Figura 1 – Vectores posição da partícula nos instantes de tempo t1 e t2
Os vectores zyxzyx rrrrrr 222111 ,,,,,
são designados por componentes vectoriais , axiais ousimplesmente como vectores componentes. Este vectores são resultado do produto de umescalar algébrico zyxzyx rrrrrr 222111 ,,,,, pelos versores dos eixos. Os valores
zyxzyx rrrrrr 222111 ,,,,, são designados por componentes (componentes escalares).Um facto de relevância num sistema de eixos como o da figura 1 é a coincidência das
coordenadas da posição do móvel e das componentes do vector posição, dado que a origem dovector posição é também a origem do referencial.
Pág. 1/21
x
y
z
x i
x
x x P(t2)
x
P(t1)
x

Sebenta de Física I Capítulo V – Cinemática
Ora, como a posição da partícula varia com o tempo, o vector posição é igualmente função dotempo, isto é:
kzjyixr ++=1 (3)
e consequentemente x,y,z também são funções do tempo,( )( )( )
===
tfz
tfy
tfx
3
2
1
(equações paramétricas do movimento) (4)
Então, conclui-se que o conhecimento do vector posição ao longo do tempo permitedeterminar:
• o vector deslocamento, num dado intervalo de tempo;• a equação da trajectória;• a velocidade instantânea;• a aceleração instantânea.
2.1Equação da trajectória do movimento
A determinação da trajectória do movimento resulta da eliminação do tempo no sistemade equações paramétricas do movimento (equações 4).
Exemplo 1. A posição de uma dada partícula é dada por: ( ) jtitr
233 2 ++= . Determine:a) a equação da trajectória;b) a posição da partícula nos instantes t=1s, 2s e 3s;c) represente graficamente a posição da partícula nos instantes de tempo da alínea
anterior.Resolução
a) ( )
−
=⇒
=
=⇔
== 2
22
4
3
2
23
2
3 yxy
t
yx
ty
txequação de uma parábola;
b) ( ) jistr
261 +== ou ( )( ) ( )2,6, 1 == styx
( ) jistr
4152 +== ou ( )( ) ( )4,15, 2 == styx
( ) jistr
6303 +== ou ( )( ) ( )6,30, 3 == styx
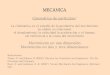
c)
Figura 2 – Representação gráfica da trajectória da partícula. Para obter o vector posição da partículapara um dado instante basta unir a origem do sistema de eixos com a posição da partícula nesse
instante
Pág. 2/21
0
1
2
3
4
5
6
0 5 10 15 20 25 30x [m ]
y [m ]

Sebenta de Física I Capítulo V – Cinemática
2.2Algumas definições
Para caracterizar o movimento recorre-se aos conceitos de deslocamento, velocidade eaceleração (média e instantânea).
2.2.1 Vector deslocamento e deslocamento escalar
Chama-se vector deslocamento de uma partícula, num dado intervalo de tempo( )12 ttt −=∆ ao vector ( )r
∆ que une as posições ocupadas pela partícula nesses instantes.(ver Figura 3)
Figura 3 – Vectores deslocamento da partícula nos instantes de tempo t1 e t2
Assim, verifica-se que:( ) ( ) =+−+=−=∆ jrirjrirrrr yxyx
112212
( ) ( ) . 1212 jrrirr yyxx
−+−= (5)
Não se deve confundir o vector deslocamento com o deslocamento escalar - s∆ . Odeslocamento escalar, num dado intervalo de tempot∆ , é determinado pela diferença deposições sobre a trajectória, ( ) ( )21 tstss −=∆ .
Na figura anterior pode-se observar que a diferença entre os vectores posição das duastrajectórias (azul e roxo) é constante e independente da trajectória seguida pelo corpo, porémo deslocamento escalar não é o mesmo em ambas as trajectórias, isto é:
( ) ( )roxorazulr ∆=∆
( ) ( )roxosazuls ∆≠∆ .
2.2.2 Velocidade média e velocidade instantânea
Definiu-se no ponto anterior o deslocamento num dado intervalo de tempo. A velocidademédia é definida como a variação da posição na unidade de tempo, isto é,
t
rvm ∆
∆=
(6)
e mede a “rapidez” com que ocorre essa variação.Se se considerar que os intervalos de tempo são muito pequenos (tendem para zero)
obtém-se a velocidade instantânea,
t
rvv
tm
t ∆∆==
→∆→∆
00limlim . (7)
Pág. 3/21
y
xx
x
x
x
P(t2)
x
P(t1)
x
0
x r∆

Sebenta de Física I Capítulo V – Cinemática
Matematicamente, a expressão anterior corresponde à definição de derivada do vectorposição relativamente ao tempo, logo,
dt
rdv
= . (8)
Da própria definição de derivada resulta que o vector velocidade instantânea é sempretangente à trajectória no ponto considerado.
Figura 4 – Posição relativa do vector velocidade e trajectória
2.2.3 Aceleração média e aceleração instantânea
A aceleração média que uma dada partícula sofre num dado intervalo de tempo, t∆ , éigual à taxa média da variação da velocidade na unidade de tempo,
t
vam ∆
∆=
(9)
logo, a aceleração instantânea resulta da aceleração média quando tomamos o limite daexpressão anterior e fazemos t∆ tender para zero,
2
2
0lim
dt
rd
dt
rd
dt
d
dt
vd
t
va
t
=
==∆∆=
→∆, (10)
ou seja, conclui-se que a aceleração instantânea corresponde à derivada da velocidaderelativamente ao tempo ou à segunda derivada do vector posição face ao tempo. A aceleraçãoexiste desde que varie a direcção da velocidade ou o seu módulo.
Exemplo 2. A posição de uma dada partícula é dada por: ( ) ( ) jttittr
43223 232 +−++= .Determine:
a) o vector velocidade;b) o vector aceleração;c) o vector deslocamento entre os instantes de tempo t=1s e t=3s;d) a posição do móvel no instante inicial (t=0s).
Resolução
a) ( ) ( ) [ ]12 ms6626 −−++== jttitdt
rdv
;
b) ( ) ( ) [ ]2ms6126 −−+== jtidt
vda
;
c) ( ) jistr
351 +==
( ) jistr
31333 +==
⇒ ( ) ( ) ( ) ( ) ( ) jijijirrstr stst
282835313331 14 −=+−+=−=÷=∆ == ;
Pág. 4/21
x
y
0
x
x x
x

Sebenta de Física I Capítulo V – Cinemática
d) ( ) [ ].m40 jstr ==
2.2.4 Componentes normal e axial da aceleração
Considere-se uma partícula que descreve uma trajectória curvilínea (Figura 5).
a) b)Figura 5 – a) Determinação do vector resultante da diferença de velocidades;
b) componentes normal e tangencial da aceleração
Constata-se que na figura 5 – a) o vector resultante da diferença de velocidades em doispontos (A e B) aponta para o interior da trajectória, verificando-se o mesmo com o vectoraceleração média. Ora o vector aceleração instantânea também estará orientado para a partecôncava da trajectória, sendo por isso possível de ser decomposto como o vector da figura 5 –b). Nesta figura, o vector aceleração resulta da soma de dois vectores perpendiculares entre si:
• um é tangente à trajectória e designa-se por aceleração tangencial;• o outro é normal ao anterior e denomina-se aceleração normal, encontrando-se
sempre dirigido para o interior da trajectória.Então, o vector aceleração é:
nt aaa += . (11)
Como determinar ta
e na
? Considerando que os versores nas direcções tangencial e
normal são respectivamente ta
e na
vem que
nntt uauaa += .
Dado que tuvv = e
( ).
dt
udvu
dt
dv
dt
uvd
dt
vda n
tt
+===
Esta última expressão mostra que a aceleração tangencial se encontra relacionada com avariação do módulo da velocidade enquanto que a aceleração normal depende da direcção davelocidade,
.2
ntnntt uR
vu
dt
dvuauaa
+=+= (12)
A análise desta expressão permite retirar as seguintes conclusões:• se
constante0 =⇒= vat ;
• se⇒= 0na a trajectória é rectilínea (R→∝), isto é, a direcção de v
não varia;
Pág. 5/21
A B
x
y
0
A
AA
A
A
x
y
0
A
A
A
A
A
A

Sebenta de Física I Capítulo V – Cinemática
• se 0 <( ) 90^ ≤av
e v
e a
têm o mesmo sentido então o movimento é acelerado;• se 90<( )av
^ <180e v
e a
têm sentidos opostos então o movimento é retardado;
• se( ) 90^ =av
e ta
é nula então o movimento é uniforme.
Exemplo 3. A posição de uma dada partícula é dada por:( ) ( ) jttittr
33123 23 +−+−+−= .Determine:
a) o vector velocidade;b) o vector aceleração;c) o vector deslocamento entre os instantes de tempo t=1s e t=5s;d) as componentes do vector aceleração instante t=10s.
Resolução
a) ( ) ( ) [ ]12 ms3229 −−++−== jtitdt
rdv
;
b) ( ) ( ) [ ]2ms218 −+−== jitdt
vda
;
c) como ( ) jistr +−== 21 e ( ) jistr
+−== 92 vem que:
( ) ( ) ( ) ( ) [ ]m 72912 ijijirrr stst
−=+−−+−=−=∆ == ;
d) ( ) [ ]2222 ms4324218 −+=+−= tta
( ) ( ) ( )
( ) [ ]2
2
2
ms181043242
648
104324
1010
−≅=+
=
==+====
stt
t
stdt
tdst
dt
adstat
( ) ( ) ( ) [ ]( ) [ ]22
2
ms1804180
ms21802101810
−
−
≅+−=⇒
⇒+−=+×−==
a
jijista
de
222nt aaa += vem que: [ ]22222 ms1,17918180 −≅−=−= tn aaa
logo, [ ].ms1,17918 2−+= tt uua
3. Estudo dos movimentos
O estudo dos movimentos pode efectuar-se de diferentes formas. Uma delas consiste emabordar em primeiro lugar os movimentos que têm como trajectória uma linha recta e deseguida os que têm uma trajectória curva.
Dentro de cada uma destas divisões podemos considerar os movimentos uniformes e osuniformemente variados (acelerados ou retardados). Seguidamente abordam-se ascomposições de movimentos, nomeadamente o lançamento de projécteis.
Pág. 6/21

Sebenta de Física I Capítulo V – Cinemática
3.1Movimento rectilíneo
Considere-se um corpo que descreve uma trajectória rectilínea como a exibida pela figuraseguinte.
Figura 6 – Trajectória de um movimento rectilíneo
Sabendo que ivv = e
( )dt
idvi
dt
dv
dt
ivd
dt
vda
+=== e dado que no movimento rectilíneo
0
=dt
id obtém-se, iai
dt
dva t
== ou taa = .
3.1.1 Movimento rectilíneo uniforme
Característica
Os deslocamentos r∆ da partícula efectuam-se sobre a mesma recta, não mudam de
sentido e os seus módulos são proporcionais aos tempos em que ocorrem, logo,
.constante==∆∆
mvt
r
(13)
Lei das velocidades
Como constantelim0
==→∆ m
tvv
então, a velocidade é constante (em módulo, direcção e
sentido).
Lei das velocidades
Se a partícula tiver abcissa x0 no instante t=0s e x no instante genérico t, tem-se que:
logo,0
00
t
rr
t
rr
t
rv
−
=−−
=∆∆=
.0 tvrr += (equação geral do movimento) (14)
e por conseguinte,.0 vtxx += (equação das posições) (15)
Pág. 7/21
x
xx
0

Sebenta de Física I Capítulo V – Cinemática
Dado que o espaço percorrido, s, coincide com o módulo do deslocamento (x-x0) vem que:.0 tvsxx ==− (16)
Representação gráfica das leis do movimento rectilíneo uniforme
0
2
4
6
8
10
12
0 1 2 3 4 5t [s]
s [m]
0
1
2
3
4
5
0 1 2 3 4 5t [s]
v [m/s]
a) b)Figura 7 – Representação gráfica da a) lei dos espaços e b) da velocidade de um movimento rectilíneo
3.1.2 Movimento rectilíneo uniformemente variado
Característica
As variações de velocidade deslocamentos v∆ da partícula efectuam-se sempre na
mesma direcção e são, em módulo, proporcionais aos tempos em que ocorrem, logo,
.constante==∆∆
mat
v
(17)
Lei das velocidades
Como constantelim0
==→∆ m
taa
então, a aceleração é constante (em módulo, direcção e
sentido).
Lei das velocidades
Seja 0v
a velocidade no instante inicial e v
a velocidade da partícula num instantegenérico. Então, da definição de aceleração vem que:
t
vv
t
vv
t
va 00
0
−
=−−
=∆∆=
logo,
Pág. 8/21

Sebenta de Física I Capítulo V – Cinemática
.0 tavv += (equação vectorial da velocidade) (18)
e por conseguinte,.0 atvv += (equação escalar da velocidade) (19)
portanto, o valor da velocidade varia linearmente no tempo.
Lei dos espaços:
Sabendo que:dt
rdv
= , a determinação do espaço percorrido é efectuada através da
integração da velocidade, isto é, rddtv = e consequentemente
( ) ⇔+=⇔=⇔= ∫∫∫∫tr
r
tr
r
dttavrddtvrddtvrd0
0
000
tatvrr
2
100 ++=⇔ (equação geral do movimento) (20)
attvxx2
100 ++=⇔ (equação das posições) (21)
Representação gráfica das leis do movimento rectilíneo uniformemente variado
a)
b) c)
Pág. 9/21
-50
-30
-10
10
30
50
70
0 1 2 3 4 5t [s]
s[m]
-10
-50
5
1015
20
2530
35
0 1 2 3 4 5t [s]
v[ms-1]
4
6
8
10
12
14
16
0 1 2 3 4 5s [m]
v[ms-1]

Sebenta de Física I Capítulo V – Cinemática
Figura 8 – Representação gráfica da a) lei dos espaços; b) da velocidade de um movimento rectilíneo;c) da variação da velocidade com o espaço
Nota: a aceleração tem um valor algébrico. Todavia, o vector aceleração pode ter o sentido domovimento ou opor-se a ele. Conforme os casos a aceleração será positiva ou negativarespectivamente, logo uma forma mais geral das leis deste movimento será:
Lei dos espaços: attvs2
10 ±= (22)
Lei as velocidades: atvv ±= 0 (23)Lei das acelerações: constante=a (24)
Ora, quando a aceleração é positiva tem o mesmo sentido que o movimento e estediz-se uniformemente acelerado, enquanto que quando se opõe ao movimento é negativa eaquele diz-se uniformemente retardado.
Por vezes tem muito interesse obter uma relação entre a velocidade e a aceleração semfazer intervir a variável tempo. A forma de a obter consiste em eliminar o tempo nas equaçõesanteriores, isto é:
⇒
+−+
−=
⇒
−+
−=
−=
⇔
+=
+=
2
200
22002
000
0
20
0
2
2
1
_____
2
12
1
a
vvvva
a
vvvs
a
vva
a
vvvs
a
vvt
attvs
atvv
−=⇒
+−+−=⇒
(25) 2
_____
2222
_____20
2200
2200 vvasvvvvvvvas
Um caso particular deste tipo de movimento é a queda de uma corpo ou grave (Figura8). Considere-se um corpo de massa m que deixado cair desde uma altura h. Como parte dorepouso a velocidade inicial é nula enquanto que a aceleração do movimento é a gravíticag=9.81 m/s2, que é constante, logo o movimento é uniformemente acelerado. As leis domovimento para este caso são:
−=−=
−=
jga
jgtv
gthh
20 2
1
(26)
Pág. 10/21x
y
0g
h0

Sebenta de Física I Capítulo V – Cinemática
Figura 9 – Queda de um grave
Comparando as equações anteriores com as leis gerais do movimento uniformementevariado constata-se que estas últimas equações foram obtidas das primeiras substituindo a
por g
e s por h0 (altura da qual se deixa cair o grave).3.3 Composição de movimentos. Lançamento de projécteis
O movimento de um projéctil lançado com velocidade inicial 0v
, que forma com ahorizontal um dado ângulo θ pode ser visto como o resultado da sobreposição de doismovimentos, sendo um deles um movimento uniforme e outro uniformemente acelerado.
Nestas notas não serão considerados os efeitos da resistência do ar nem do movimentode rotação da Terra.
De seguida aborda-se o lançamento oblíquo ( )0≠θ de um projéctil considerando-se
posteriormente o lançamento horizontal ( ).0=θ
Lançamento oblíquo
Exemplos de lançamentos oblíquos:
• Lançamento de uma bola de baseball;• Lançamento de uma bola de golf;• Movimento de uma bala;• Etc.
Característica principal – a aceleração do movimento é g
(constante), tem a direcçãovertical e sentido de cima para baixo ⇒ a componente horizontal da aceleração é nula. Porisso, o projéctil tem uma velocidade xv0
constante (a aceleração é-lhe normal) e a velocidade
yv0
é variável e vai depender da aceleração (porque têm a mesma direcção). Logo, este
movimento pode ser considerado como a sobreposição de dois movimentos:• um movimento rectilíneo uniforme segundo a horizontal ( ( )θcos00 vv x = =const.); • um movimento rectilíneo uniformemente variado segundo a vertical comvelocidade inicial ( )θsen00 vv y = e aceleração jga
−= .
Equações paramétricas do movimento
É facilmente verificável que a posição do projéctil num dado instante de tempo é dadapor:
Pág. 11/21

Sebenta de Física I Capítulo V – Cinemática
−+=
+=
200
00
2
1gttvyy
tvxx
y
x
(equações paramétricas do movimento) (27)
logo, a equação geral do movimento é:
( ) jgttvyitvxjyixr yx
−+++=+= 20000 2
1. (28)
Consequentemente, a velocidade do projéctil é:
( ) jgtvivjvivjdt
dyi
dt
dx
dt
rdv yxyx
−+=+=+== 00 , (29)
onde se constata que a componente da velocidade segundo x se mantém constante e acomponente da velocidade segundo y varia (diminui até que o projéctil atinja a altura máximae aumenta desde esse instante até atingir o solo). O ângulo que a velocidade faz com ahorizontal também varia e é dado por:
=
x
y
v
varctgθ . (30)
Definições
Alcance – Distância horizontal percorrida pelo projéctil no tempo de voo,ALCANCE== voooxtvx
Tempo de voo – tempo que o projéctil demora a atingir o alcance;Altura máxima – altura máxima alcançada pelo projéctil. Neste ponto tem-se sempre
que a componente da velocidade segundo y é nula, isto é, 0 =yv e jga
−= , logo,
o tempo decorrido até que se atinja a altura máxima é dado por:
g
vtgtvv y
yy0
0 00 =⇔=−⇔= e a altura máxima é obtida substituindo o valor de
t na equação de y,
( );
22
122
g
vy
g
vg
g
vvyy oy
ooyoy
oyomax +=
−+=
Velocidade inicial – velocidade do projéctil no momento do lançamento, isto é,( ) ( ) .sencos 00000 jvivjvivv yx
θθ +=+=
Pág. 12/21
Alcance x
y
0
Altura máxima
Vo
θθθθ
Vox
Voy

Sebenta de Física I Capítulo V – Cinemática
Figura 10 – Representação de um lançamento oblíquo
Exemplo 4. Um morteiro dispara um projéctil com velocidade inicial de 75 ms-1 fazendo umângulo de 35º com a horizontal. Determine: a) a velocidade do projéctil nos seguintes instantes de tempo: t=1,5,10,15,20s;b) a aceleração do projéctil para os instantes de tempo da alínea anterior;c) as componentes tangencial e normal da aceleração para t=1,5,10,15,20s;d) tempo de voo;e) o alcance do projéctil;f) a altura máxima atingida pelo projéctil e o instante de tempo em que a atinge;
Resolução
a) ( ) ( ) jtijgtvivv oyox
81,935sen7535cos75 −+=−+=
t [s] v
[m/s]1 ji
21,3344,61 +
5 ji
03,644,61 −10 ji
08,5544,61 −
15 ji
13,10444,61 −20 ji
18,15344,61 −
b) [ ]2ms81,9 −−=−= jjga
;
c) nntt uauaa +=
( ) ( ) ( ) ( ) ( )( ) ( )22
2222
gtvv
gtvg
dt
gtvvd
dt
vvd
dt
vda
oyox
oyoyoxyx
t
−+
−−=
−+=
+==
( ) ( ) ( )2222tnnt aaaaaa −=⇔+= , logo constrói-se um quadro semelhante ao da
alínea a)
t [s]ta [m/s2] na [m/s2] a [m/s2]
1 -4,67 8,63 9,815 0,96 9,76 9,8110 6,55 7,30 9,8115 8,45 4,99 9,8120 9,11 3,65 9,81
d) Se o disparo for efectuado a um nível constante (Figura 10) verifica-se que quando oprojéctil embate no solo a sua coordenada segundo y é nula. Então, se na equação daposição se considerar y=0, determinam-se dois valores do tempo: o nulo corresponde aoinstante do lançamento e o diferente de zero corresponde ao instante em que embate nosolo, isto é, ao tempo de voo.
sgg
vtstgtvtgttv y
yy 770,835sen7522
002
1
2
100 0
02
0 =⋅⋅==∨=⇔=
−⇔−+=
Nota:Se o lançamento for efectuado de um ponto com uma dada cota (y0≠0) é necessáriosubstituir y0 pelo seu valor e y será a cota do ponto de impacto.
Pág. 13/21

Sebenta de Física I Capítulo V – Cinemática
e) O alcance é determinado através da equação paramétrica segundo x, substituindo t pelotempo de voo,
mtvx vooox 82,53877,835cos57 =⋅⋅==f) No instante em que o projéctil atinge a altura máxima verifica-se que a componente da
velocidade segundo y é nula, logo
sgg
vtgtvv y
yy 385,435sen75
00 00 =⋅==⇔=−⇔=
e a altura máxima é calculada substituindo o valor de t na equação paramétrica domovimento segundo y,
( ) ( )m
gg
v
g
vg
g
vvy oyoyoy
oymax 321,942
35sen75
22
1 222
=⋅
⋅==
−=
Nota: Neste caso o tempo de voo é duas vezes o tempo que o projéctil demora a atingir aaltura máxima, porque a trajectória é simétrica. Se o lançamento for efectuado de umponto com uma dada cota (y0≠0) já não se verifica essa conclusão.
Lançamento horizontal
Este lançamento pode ser deduzido do lançamento oblíquo fazendo 0=θ , logo asequações que o regem assumem a seguinte forma:
−=
+=
20
00
2
1gtyy
tvxx
(equações paramétricas do movimento) (31)
=+= jyixr
( ) jgtyitvx
−++= 2000 2
1 (equação geral do movimento) (32)
Consequentemente, a velocidade do projéctil é:
( ) jgtivjvivjdt
dyi
dt
dx
dt
rdv xy
−+=+=+== 00 , (33)
onde se constata que a componente da velocidade segundo x se mantém constante e acomponente da velocidade segundo y varia (aumenta desde esse instante até atingir o solo). Oângulo que a velocidade faz com a horizontal também varia e é dado por:
=
x
y
v
varctgθ . (34)
Característica principal – a aceleração do movimento é g
(constante), tem a direcçãovertical e sentido de cima para baixo ⇒ a componente horizontal da aceleração é nula. Porisso, p projéctil tem uma velocidade xv0
constante (a aceleração é-lhe normal) e a velocidade
yv0
é variável e vais depender da aceleração (porque têm a mesma direcção). Logo, este
movimento pode ser considerado como a sobreposição de dois movimentos:• um movimento rectilíneo uniforme segundo a horizontal ( 00 vv x = =constante);
Pág. 14/21

Sebenta de Física I Capítulo V – Cinemática
• um movimento rectilíneo uniformemente variado segundo a vertical com
velocidade inicial jgtvy
−= e aceleração jga −= .
Exemplo 5. Um berlinde rola sem escorregar sobre o tampo de uma mesa de altura 1,29 m.Após perder o contacto com o tampo percorre uma distância 1,56 m medida na horizontal.Calcule: a) tempo de voo;b) a velocidade inicial;c) a velocidade do projéctil nos seguintes instantes de tempo: t=0,1; 0,2; 0,3; 0,4; 0,5 e
tvoo;d) a aceleração do projéctil para os instantes de tempo da alínea anterior;e) as componentes tangencial e normal da aceleração para os instantes de tempo da alínea
c).
Resolução
a) [ ]stg
yt
gty
gtyy 513,0
81,9
29,122
20
20
2
0
2
0 =⋅±=⇔±=⇔−=⇔−=
b) [ ]100 ms04,3
513,0
56,1 −===⇔=t
xvtvx
c) jgtivv o
−=
t [s] v [m/s]0,1 ji
981,004,3 −
0,2 ji
962,104,3 −0,3 ji
943,204,3 −
0,4 ji
924.304,3 −0,5 ji
905.404,3 −
0,513 ji
033.504,3 −
d) jga −= (ver tabela abaixo)
e) ( ) ( ) ( ) ( )2222tnnt aaaaaa −=⇔+=
( ) ( )
( ) ( ) ( ) ( )220
220
220
2
2
gtv
gt
gtv
gt
dt
gtvd
dt
vdat
−+
−
−+
−=
−+
==
t [s]ta [m/s2] na [m/s2] a [m/s2]
0,1 -0,307 9,805 9,810,2 -0,543 9,795 9,810,3 -0,696 9,785 9,810,4 -0,791 9,778 9,810,5 -0,850 9,773 9,81
0,513 -0,856 9,7726 9,81
Pág. 15/21

Sebenta de Física I Capítulo V – Cinemática
Pág. 16/21

Sebenta de Física I Capítulo V – Cinemática
3. 2 Movimento curvilíneo
A figura 12 mostra um ponto P a mover-se ao longo de uma circunferência de raio r.Em dois instantes de tempo (t2>t1) ocupa as posições P2 e P1, respectivamente.
Figura 12 – Representação do movimento curvilíneo de um móvel
A caracterização deste movimento assenta no conhecimento de parâmetros lineares (s,v, at e an) e parâmetros angulares (θ, ω, α) e das relações entre eles.
Os parâmetros lineares do movimento são:• Arco descrito s – é o arco descrito pelo ponto no seu movimento: ( )tfs 1=
• Velocidade linear v – relaciona o arco descrito com a variável tempo: dt
dsv =
• Aceleração tangencial at – só existe quando varia o módulo da velocidade:
dt
dvat =
• Aceleração normal an – existe sempre nos movimentos curvilíneos, mesmo quesejam uniformes visto que depende da variação da direcção do vector velocidade.
Orienta-se sempre para o centro da trajectória, R
van
2
= .
Os parâmetros angulares do movimento são:• Ângulo ao centro θ – é o arco descrito pelo ponto no seu movimento: ( )tf2=θ• Velocidade angular ω – se o móvel consome um tempo 12 ttt −=∆ para se
deslocar de P1 a P2 tem-se que a velocidade angular média é: t
wm ∆∆= θ
e que a
velocidade angular instantânea é dada por: dt
dwm
θ= ;
• Aceleração angular α – sejam ω1 e ω2 duas velocidades angulares instantâneascorrespondentes a P1 e P2. Durante um certo intervalo de tempo ∆t=t2-t1 verifica-
se uma variação na velocidade angular: dt
dw=α
Pág. 17/21
O
P1
P2
r
θ∆
v

Sebenta de Física I Capítulo V – Cinemática
Como se relacionam os parâmetros lineares com os angulares?
Relação entre s e θθrs =
Relação entre v e wwrv =
Relação entre ta e αrat α=
3.1.3 Movimento curvilíneo uniforme
Neste tipo de movimento a velocidade (agora angular) é constante, 0=w
Logo o deslocamento é dado por uma função do tipo: wt+= 0θθ em que 0θ é odeslocamento inicial (para t=0).
Exemplo 6. Uma partícula descreve uma trajectória circular de raio 4 [m], sendo a suaposição dada, em unidades S.I., por: 484 2 ++= tts . Determine: a) A velocidade angular do movimento no instante t=2 s;b) a aceleração angular do movimento;c) a aceleração linear ao fim de 1 s;
Resoluçãoa) A lei angular do movimento é: θrs = , logo: 124484 22 ++=⇔=++ tttt θθ .
A velocidade angular é: 22 +== tdt
dw
θ e para t=2 [s] toma o valor
( ) [ ]rad/s622 2 =+= = sttw
b) [ ]1rads2 −==dt
dwα
c) 22nt aaa += e como [ ]1rads824 −=⋅== αrat e ( ) 422 22 ⋅+== twan vem que para
t=1 s ( ) [ ]-122 rads644212 =⋅+⋅== wan , logo: [ ]222 ms5,64648 −=+=a
Exemplo 7. A lei de um movimento circular de raio10 [cm] é, em unidades S.I.,254 3 −−= tts . Determine as expressões das componentes cartesianas do vector
velocidade.
Resolução
A velocidade linear é: 512 2 −== tdt
dsv , logo θθ 1,0512 2 =−⇔= trs , e portanto:
501201,0
5124484 2
22 −=−=⇔=++ t
ttt θθ .
Então, a as componentes da cartesianas da velocidade, são determinadas de acordocom a figura seguinte através das seguintes relações:
Pág. 18/21

Sebenta de Física I Capítulo V – Cinemática
( ) ( )50120coscos 2 −== tvvvy θ e ( ) ( )50120sensen 2 −== tvvvx θ .
A classificação dos movimentos em uniformes, uniformemente variados ou variadospode ser efectuada considerando as componentes normal e tangencial da aceleração, tal comose evidencia no seguinte quadro.
Movimentos rectilíneos Movimentos curvilíneos
Movimentosuniformes
00
0
=∴⇒
=
=a
a
a
t
n n
t
n aaa
a
=∴⇒
=
≠
0
0
Movimentosuniformemente
variados constante é
0
0
t
t
t
n
a
aaa
a
=∴⇒
≠
=
constante é
0
0
t
nt
t
n
a
aaaa
a
+=∴⇒
≠
≠
Movimentosvariados
constante- não é
0
0
t
t
t
n
a
aaa
a
=∴⇒
≠
=
constante - não é
0
0
t
nt
t
n
a
aaaa
a
+=∴⇒
≠
≠
Nota: Nos movimentos rectilíneos o raio da trajectória, R, é infinito, logo: 02
→∞
= van . Por
outro lado, nos movimentos uniformes a velocidade é constante , logo: 0==dt
dvat .
3. 3 Movimento relativo
Observando a figura 12 constata-se que a posição do ponto P ao longo do tempo é
descrita pelos sucessivos vectores Pr . Porém, ao utilizar o sistema de eixos móvel '''' Ozyx a
posição do ponto P pode ser descrita pela soma de dois vectores: Ar e APr / , que traduzem a
variação da posição da origem do referencial auxiliar (móvel) – ponto A e a variação daposição de P relativamente ao referencial móvel, logo:
APAP rrr /
+= . (??)
Pág. 19/21
O
Pr v
θ
θ yv
xv
x
y

Sebenta de Física I Capítulo V – Cinemática
Figura 12 – Representação de um movimento relativo
Derivando a expressão anterior relativamente ao tempo, obtém-se a expressão dasvelocidades, isto é,
dt
rd
dt
rd
dt
rd APAP /
+= ou APAP vvv /
+= (??)
onde Pv
e AP vv = são velocidades absolutas (são determinadas a partir do sistema fixo de
referência) enquanto que APv /
é uma velocidade relativa (determinada relativamente ao
sistema móvel).
Derivando novamente em relação ao tempo determina-se a equação que relaciona asacelerações absoluta e relativa,
APAP aaa /
+= (??)
A análise destas equações permite concluir que “... o movimento absoluto de P pode ser obtido através da combinação do movimento de A e do movimento de P em relaçãoao sistema móvel ligado a A....” (Beer e Johnston, Mecânica vectorial para Engenheiros –Dinâmica, ;McGraw-Hill, 1980, S. Paulo, Brasil)
Convém referir que o sistema de eixos móvel mantém a mesma orientação enquanto sedesloca solidário com o ponto A, isto é, está animado de movimento de translacção.
Exemplo 8. De uma torneira caem gotas de água à taxa de 5 gotas por segundo. Determine adistância vertical entre duas gotas consecutivas se a primeira a cair já atingiu umavelocidade de 3 [ms-1].
Pág. 20/21
O
z
x
y
A
z’
x’
y’ P
Ar
APr /
Pr

Sebenta de Física I Capítulo V – Cinemática
Pág. 21/21

Sebenta de Física I Capítulo V – Cinemática
Bibliografia
1. “The Feynman Lectures on Physics”, Volume 1, Feynman, R.P., Leigthon, R. B. and Sands, M., Addison-Wesley, 1977, 6th edition2. “Mecânica – dinâmica”, Hibbeler, R. C., LTC, Rio de Janeiro,19983. “Física 10º Ano”, Natário, José, Edições ASA, 1984, 2ª edição4. “Física 12º Ano”, Cabeças, M. M., Edições ASA, 2000, 2ªedição5. “Exercícios de Física 12º Ano”, Arieiro, M. Elisa e Lucas,Jaime, Porto Editora, 1997,6. “Física 12º Ano”, Silva, Daniel M. da, Lisboa Editora, 19977. “Física”, Sears, Francis, Zemansky, M. W. and Young, H. DLTC, Rio de Janeiro, 1995, 2ª edição8. “Engineering Mechanics - Statics”, Volume 1, Meriam, J.L.,and Henderson, J.M., John Wiley and SonsAddison-Wesley, 1992, 3rd edition9. “Engineering Mechanics - Statics”, Volume 2, Meriam, J.L.,and Henderson, J.M., John Wiley and SonsAddison-Wesley, 1992, 3rd edition10. “Física – um curso universitário”, Alonso, Marcelo e Finn, E.J., Editora Edgard Blutcher Lda, S. Paulo, 1981, 3ª edição11. “Mecânica Vectorial para Engenheiros - Dinâmica”, Beer,Ferdinand, e Johnston, E. R., Mcgraw-Hill, S. Paulo, 1980, 3ª edição
Pág. 22/21

Sebenta de Física I Capítulo V – Cinemática
Um caso muito particular de um movimento relativo é o movimento de um mecanismo deroldanas (movimento dependente), por exemplo. Na figura seguinte encontra-se representadoum mecanismo desse tipo que envolve o movimento de duas partículas (corpos) A e B.
Pág. 23/21

Sebenta de Física I Capítulo V – Cinemática
Movimento rectilíneo
1. Uma partícula desloca-se sobre uma linha recta, sendo a sua posição dada para qualquerinstante de tempo por: 2038 2 +−= tts .Determine:
a) a velocidade e a aceleração da partícula para qualquer instante de tempo;b) o tempo para o qual a velocidade é nula;c) a distância percorrida até ao instante em que a velocidade é nula;d) a aceleração para o instante de tempo da alínea b).
2. A velocidade da luz no vazio é de 300 000 km/s. Sabendo que a luz demora a atingir aTerra cerca de 8 minutos, determine a distância entre a Terra e a Sol.
3. Um corpo animado de movimento rectilíneo uniforme percorre 72 km em meia hora.a) Calcule a velocidade do corpo;b) Escreva a equação horária do movimento
4. O gráfico da Figura 1 representa a lei horária de um corpo de um corpo animado demovimento uniforme e rectilíneo.
a) a velocidade deste movimento;b) escreva a lei horária deste movimento;c) qual o módulo do vector deslocamento correspondente ao percurso entre osinstantes 3 e 5 s.
5. Um corpo parte do repouso e do ponto considerado origem da trajectória com velocidadeconstante percorrendo 10 m em 5 s. Após este percurso permanece parado durante 4 segundosao que se segue uma nova etapa percorrendo agora em movimento uniforme 20 m em 5 s.
a) Desenhe o gráfico deste movimento;b) Desenhe o correspondente gráfico de velocidades.
6. Um automóvel encontra-se parado num sinal vermelho. Ao acender-se o verde arranca esimultaneamente passa por ele um segundo automóvel com velocidade constante,encontrando-se representados na figura 2 as velocidades dos dois carros. Analise-os eresponda às seguintes questões:
a) Quanto tempo decorreu até que o carro A atingiu o carro B?;b) Qual a aceleração do carro A no instante do arranque?;c) Qual a distância entre os carros quando as velocidades dos dois automóveis são iguais?;d) Calcule a distância percorrida pelos automóveis desde o arranque até ao instante em quese reencontraram.
7. A figura representa o gráfico da variação dos espaços em função do tempo do movimentode um dado móvel, em trajectória rectilínea.
a) Qual a posição do móvel quando se iniciou a contagem do tempo;b) Classifique o movimento;c) calcule o módulo do vector deslocamento entre os instantes 5 e 10 s;d) a velocidade é maior no intervalo 0-1s ou no intervalo 5-6s?
Pág. 24/21

Sebenta de Física I Capítulo V – Cinemática
8. A posição de uma partícula animada de movimento rectilíneo em função do tempo érepresentada na figura 4.
a) Caracterize o movimento nos intervalos 0-2s, 2-4 s, 4-8 s;b) Caracterize a velocidade entre os instantes 0-2s, 2-4 s, 4-8 s;c) Caracterize o deslocamento correspondente ao intervalo 0-8 s;d) Determine o espaço percorrido nos primeiros 8 s;e) Desenhe os gráficos da velocidade e aceleração em função do tempo.
Figura 1 Figura 2
Pág. 25/21

Sebenta de Física I Capítulo V – Cinemática
Movimento curvilíneo
9. A posição de uma partícula é dada por: ( ) ( ) jtittr
133 22 ++−= . 2 do livro resumoDetermine:a) a velocidade e a aceleração da partícula;b) a aceleração tangencial e normal;c) o raio da trajectória;d) caracterize o movimento da partícula.
10. As equações paramétricas do movimento de uma partícula são:
−=+=1
53
ty
tx. 1 do livro resumo
a) A trajectória é rectilínea ou curvilínea?;b) Determine a velocidade média da partícula entre os instantes 0 e 2s;c) Determine a velocidade e aceleração da partícula no instante t=3s;
11. Num dado instante, o ângulo formado pela velocidade e aceleração é 120º. Sabendo queos módulos da velocidade e aceleração são respectivamente 2,0 ms-1 e 8,0 ms-2, determine oraio de curvatura da trajectória nesse momento e diga se o movimento é acelerado ouretardado. 4 do livro resumo
12. Uma partícula move-se numa trajectória circular de raio 10 cm, com aceleração tangencialde módulo constante, tendo partido do repouso. No momento em que a completa a segundavolta, o módulo da sua velocidade é 50 cms-1. Determine:. 5 do livro resumo
a) O módulo da aceleração tangencial da partícula;b) O módulo da velocidade média da partícula, no intervalo de tempo em que efectua a
primeira meia volta.
13. Num dado instante, o ângulo formado pela velocidade e aceleração é 120º. Sabendo queos módulos da velocidade e aceleração são respectivamente 2,0 ms-1 e 8,0 ms-2, determine oraio de curvatura da trajectória nesse momento e diga se o movimento é acelerado ouretardado. 4 do livro resumo
Problemas propostos:
1. Demonstrar que um lançamento oblíquo (vo e θ) tem uma trajectória parabólica.2. Qual o valor de θ para que o alcance seja máximo.
Pág. 26/21

Sebenta de Física I Capítulo V – Cinemática
Pág. 27/21