Embed Size (px)
Citation preview

1
DEVELOPMENT OF A DESIGN GUIDELINE FOR BRIDGE PILE FOUNDATIONS SUBJECTED TO LIQUEFACTION-INDUCED LATERAL SPREADING
Arash Khosravifar, Assistant Professor, Portland State University, Portland, OR, [email protected] Jonathan Nasr, Graduate Student Researcher, Portland State University, Portland, OR [email protected]
ABSTRACT
Effective-stress nonlinear dynamic analyses (NDA) were performed for piles in liquefiable sloped ground to assess how inertia and liquefaction-induced lateral spreading combine in long-duration vs. short-duration motions. A parametric study was performed using input motions from subduction and crustal earthquakes covering a wide range of motion durations. The NDA results showed that the pile demands increased due to liquefaction-induced lateral spreading compared to nonliquefied conditions. The NDA results were used to evaluate the accuracy of the equivalent static analysis (ESA) recommended by Caltrans/ODOT for estimating pile demands. Finally, the NDA results were used to develop new ESA methods to combine inertial and lateral spreading loads for estimating elastic and inelastic pile demands.
Keywords: Pile, Liquefaction, Lateral Spreading
1. INTRODUCTION
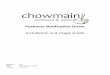
Past earthquakes indicate that liquefaction-induced lateral spreading is a major cause of collapse of pile foundations. Current design codes require that foundations be designed to sustain both lateral spreading load (kinematic) and superstructure load (inertia) during shaking as shown on Figure 1. However, recommendations vary on how to combine these two loads in design. For example, AASHTO (2014) recommends designing piles for simultaneous effects of inertia and lateral spreading only for large magnitude earthquakes (M>8). ASCE/COPRI 61 (2014) assumes independent effects of these loads for port facilities, although it recommends evaluating this assumption on a project-specific basis. Caltrans (2012) and ODOT (Ashford et al. 2012) recommend combining 100% lateral spreading with 50% inertia. WSDOT (2015), on the other hand, recommends 100% lateral spreading with 25% inertia.
The purpose of this study is to evaluate the effects of long-duration subduction earthquakes on inelastic deformations of piles subjected to combined inertia and liquefaction-induced lateral spreading. These effects are particularly important in the Pacific Northwest where the expected magnitude 9 Cascadia Subduction Zone earthquake is estimated to produce motions with duration as long as 4 minutes. This paper will, first, present the development of ground motions for two representative sites in Oregon with contributions from the Cascadia Subduction Zone (expected to produce long-duration motions) and crustal sources (expected to produce short-duration motions). Then, the development of a 2-D finite-element dynamic model will be presented. The FE model will be used in a parametric study to perform Nonlinear Dynamic Analyses (NDA) covering a range of ground motions. The pile demands from NDA will be used to evaluate current Equivalent Static Analysis (ESA) procedures by Caltrans/ODOT. The NDA results will then be used to develop new ESA procedures for design.
The approach adopted in this study was to perform NDA to evaluate the accuracy of ESA procedures. The NDA were performed on a large diameter (2-meter) RC pile in liquefying/nonliquefying soils. The maximum pile head displacement was used as a representative of pile performance to compare the results of ESA against those of NDA.
Figure 1. Piles subjected to the combined lateral spreading and inertia
Stiff crust
Loose liquefiable sand
Dense sand
Deformedsoil profile
Inertia
Lateral spreadingforce

2
2. NONLINEAR DYNAMIC ANALYSIS (NDA)
2.1 FINITE-ELEMENT (FE) MODEL
Two-dimensional effective-stress nonlinear dynamic analyses (NDA) were performed in OpenSees Finite-Element (FE) software (Mazzoni et al. 2009). The FE model included three components (Figure XYZ):
(1) A 2-D soil column was used to simulate the free-field site response. The soil was modeled using Pressure-Dependent-Multi-Yield (PDMY02) constitutive model for sand and Pressure-Independent-Multi-Yield (PIMY) for clay, in conjunction with the 9-4-Quad-UP elements (Yang et al. 2003). The primary focus of the calibration process was to capture liquefaction triggering and post-liquefaction accumulation of shear strains based on empirical or mechanics-based correlations by Idriss and Boulanger (2008). The soil column was assigned a large thickness to preclude the effects of soil-pile reactions on the site response, thus capturing the free-field soil behavior. More details on the calibration of the FE model and input parameters are provided in Khosravifar et al. (2014a). The ground motions were applied as outcrop motions at the base of the soil column using the compliant-base procedure per Mejia and Dawson (2006).
(2) The RC shaft (CIDH pile) was modeled using fiber sections and nonlinear-beam-column elements with nonlinear stress-strain behavior for reinforcing steel, confined concrete, and unconfined concrete. This model is capable of capturing the nonlinear behavior of RC piles and the formation of a plastic hinge at any depth.
(3) The soil-pile interface was simulated using py, tz and qz soil springs to model lateral, side-friction and end-bearing interface behaviors. The soil spring parameters were obtained based on API (2000). A special type of py and tz springs were used in the liquefied layer (implemented as pyLiq and tzLiq in OpenSees) where the strength and stiffness of the springs change in proportion to the excess-pore-water pressure ratio in the adjacent soil element. These models have proven to be effective in capturing the first-order effects of liquefaction during dynamic analyses (Brandenberg et al. 2013).
The subsurface condition analyzed in this study consisted of a typical three-layer profile: a 5-meter nonliquefying crust with undrained shear strength of Su = 40 kPa, overlying a 3-meter loose liquefying sand with (N1)60 = 5, overlying a nonliquefying dense sand with (N1)60 = 35. The RC pile was 2 meters in diameter with 20-meter embedment and 5-meter height above the ground. The pile head to superstructure connection was free to rotate. The concrete strength was f’c = 44.8 MPa. The superstructure dead load was 7 MN, corresponding to approximately 5% f’c*Ag. The dynamic analyses (NDA) were performed for two conditions: (1) liquefied sloped-ground condition, and (2) nonliquefied level-ground condition where pore-water pressure generation was precluded. In the liquefied sloped-ground condition, a static shear stress was applied to the soil model to simulate 10% ground slope (α = 0.1).
2.2 GROUND MOTIONS
Seismic hazard analyses were conducted for two different sites in Oregon, the coastal city of Astoria and the downtown region of Portland. Based on the USGS seismic hazard deaggregation tool the seismic hazard in Astoria is almost entirely dominated by a single source, the Cascadia Subduction Zone (CSZ), while the seismic hazard in Portland is dominated by a combination of the CSZ and a nearby crustal fault known as the Portland Hills Fault (PHF). For each site, two design spectra were developed: a 975-year design spectrum per AASHTO (2014) and an MCER spectrum per ASCE 7-10. The target spectra were developed for site class B/C (Vs30 760 m/s) as input for the site-specific NDA.
Figure 2. Schematic of the finite-element (FE) model

3
Seven (7) ground motions were selected for each site, considering factors such as fault mechanism, magnitude, shear wave velocity, and source to site distance. In the case of the Portland site and the PHF, the probability of pulse motions was considered based on the work of Hayden et al. (2014). As a result, 2 of the 4 selected crustal motions contained velocity pulses. Each suite of seven motions was scaled to collectively match the respective target spectrum. In addition to the ground motion scaling, the selected ground motions for the Portland site were spectrally matched to both target spectra specifically to evaluate the effects of motion duration as part of the parametric study. The characteristics of the selected motions and their response spectra are provided in Appendix A.
2.3 NDA RESULTS
Representative NDA results for one ground motion are provided in Appendix B as an example. The input motion used in the example is the 2010 Maule earthquake (STL station) scaled to the AASHTO design spectra developed for the Portland site (PGA = 0.27 g). This is a subduction earthquake with a significant duration, D5-95, of 40.7 seconds. The long-duration characteristics of this motion increased the chances of inertial and kinematic demands to interact constructively during shaking. The time of maximum pile head displacement (0.17 meter downslope) is marked by a vertical dashed line in Figure B1. At this time, the superstructure inertia is 75% of its maximum and the lateral spreading force (crust load) is 70% of its maximum. Note that at this time liquefaction has already triggered (ru=100%), and the lateral spreading load has almost fully mobilized. The relative displacement between soil and pile is 0.35 meters; 0.4 meters of relative displacement is required to fully mobilize the passive force in the clay crust.)
Figure 3 shows aggregated NDA results from all 42 input motions. The figure compares the maximum pile head displacements between liquefied sloped-ground conditions (combined inertial and kinematic demands) and nonliquefied level-ground conditions (inertia only). The fact that all pile demands are larger in the liquefied condition compared to the nonliquefied condition indicates that demands cannot be enveloped by merely accounting for the effects of inertia only or lateral spreading only (i.e. treating them separately). This finding is contrary to the recommendations of MCEER/ATC (2003) that suggests designing piles for the envelope of inertia and kinematics separately. Furthermore, these findings are aligned with the results of other recent studies such as Tokimatsu et al. (2005), Boulanger et al. (2007), Caltrans (2012), and Khosravifar et al. (2014a).
Figure 3. Comparison of maximum pile head displacements in liquefied sloped-ground conditions versus nonliquefied level-ground conditions from nonlinear dynamic analyses (NDA)
0 0.2 0.4 0.6 0.8 1 1.2
Disp (m) - Nonliquefied
0
0.2
0.4
0.6
0.8
1
1.2
Dis
p (
m)
- L
iqu
efie
d
Portland MCER Matched
Portland AASHTO Matched
Portland MCER Scaled
Portland AASHTO Scaled
Astoria MCER Scaled
Astoria AASHTO Scaled
Max Pile Head DisplacementNonlinear Dynamic Analysis (NDA)

4
3. EQUIVALENT STATIC ANALYSIS (ESA)
The equivalent static analysis (ESA) was performed using the p-y method in LPILE (Ensoft 2016). The accuracy of the ESA method in estimating pile demands was measured by comparing the maximum pile head displacements from ESA to those from NDA. Therefore, it was important that the soil and pile models in the ESA and NDA were comparable. The pile in the ESA was modeled by user-defined nonlinear moment-curvature behavior that replicated the FE model used in the NDA. Similarly, the p-y springs in the ESA model were nearly identical to the ones used in the NDA FE model (i.e. Matlock springs for Clay and O’Neill springs for Sand, per API 2000).
The Caltrans/ODOT ESA method consists of, first, performing pushover analysis for nonliquefied conditions to get the inertial demands, and then performing pushover analysis for liquefied conditions combining inertial and kinematic demands. The remainder of this section covers the steps involved in performing the Caltrans/ODOT ESA and discusses the accuracy of the method. Once the relative accuracy of the Caltrans/ODOT ESA method was evaluated, the NDA results were used to propose an improved ESA method.
3.1 NONLIQUEFIED CONDITIONS
Performing the ESA for nonliquefied condition, consists of the following steps: (1) Perform pushover analysis with nonliquefied (regular) p-y springs. (2) Estimate the equivalent lateral stiffness and the natural period of the soil-pile system. Caltrans recommends using the first-rebar-yield point to calculate the equivalent stiffness. However, Khosravifar and Boulanger (2012) found that 75% of the ultimate pushover force better represents the equivalent stiffness; therefore, this method was used in this study. (3) Find the elastic inertia using the elastic design spectrum (5% damping) developed for the ground-surface in the nonliquefied condition. (4) Use the R-μ-T relationships to convert elastic inertial demands to inelastic demands. Equal-displacement assumption can be applied for long-period structure (ATC-32 1996). Figure 4 shows the comparison of the maximum pile head displacements obtained from NDA and those estimated from ESA, both in the nonliquefied condition. This figure shows that the ESA adequately estimates the pile demands in nonliquefied conditions. The residuals between the ESA and NDA results have a standard deviation of 0.15 assuming a log-normal distribution.
Figure 4. Comparison of maximum pile head displacements in nonliquefied conditions estimated from equivalent static analysis (ESA) and those computed from nonlinear dynamic analysis (NDA)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Disp (m) - NDA
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Dis
p (
m)
- E
SA
Portland MCER Matched
Portland AASHTO Matched
Portland MCER Scaled
Portland AASHTO Scaled
Astoria MCER Scaled
Astoria AASHTO Scaled
Max Pile Head Displacement(Nonliquefied Conditions)

5
3.2 LIQUEFIED CONDITIONS
3.2.1 Evaluate ESA Method by Caltrans/ODOT
The Caltrans/ODOT method (Caltrans 2012 and Ashford et al. 2012) outlines ESA procedures to estimate pile demands due to liquefaction-induced lateral spreading. The method consists of three primary steps: (1) Estimate kinematic demands by calculating liquefaction-induced lateral spreading displacements. (2) Estimate the inertial load in liquefied conditions that coincides with the kinematic demands by taking 50% of the maximum inertial load in nonliquefied conditions. (3) Combine 100% of kinematic demands and 50% of inertia in ESA.
3.2.1.1 Estimate Liquefaction-Induced Lateral Spreading
The soil displacements were estimated using the simplified procedures by Idriss and Boulanger (2008). The factor of safety (FOS) against liquefaction in the loose sand layer was found to be 0.1 and 0.15 for the AASHTO and MCER seismic demands at both sites, respectively, indicating that liquefaction will trigger under design level shaking. The free-field lateral spreading displacements were estimated as 1.5 meters for both levels of seismic demands using the simplified LDI method. While the Caltrans/ODOT method allows designers to take advantage of pile-pinning effects to reduce the soil displacements within embankments, the slope in this study was assumed to be infinite and pile-pinning effects were not considered. The soil displacement profile was assumed constant through the clay crust and linearly reduced to zero through the liquefied layer. The calculated pile head displacement due to the lateral spreading only (i.e. kinematic demand) was 0.04 meters. The ratio of the lateral spreading induced bending moment to the plastic moment of the RC section was MLS/Mp = 30% (Mp = 30 MN.m).
3.2.1.2 Estimate Inertial Load in Liquefied Conditions
The elastic inertial loads in nonliquefied conditions were multiplied by 50% per the Caltrans/ODOT guideline which accounts for two main effects: 1) the change in site response due to liquefaction, and 2) the portion of inertia that is likely to coincide with the kinematic loads during the critical cycle. The critical cycle is defined here as the loading cycle during which the pile head displacement is maximum.
3.2.1.3 Combine Kinematic and Inertial Demands in a Pushover Analysis for Liquefied Conditions
The pushover analysis was performed by, first, modifying the p-y curves in the liquefied layer. The p-multiplier in the loose liquefiable layer in this study was calculated as 0.05 per Caltrans (2012). The p-multipliers were linearly increased to 1.0 at a distance equal to one pile diameter (2 m) above and below the liquefying layer to account for the weakening effects of the liquefying layer on the overlying and underlying nonliquefied layers (McGann et al. 2011). Second, the lateral spreading displacements were applied to the end-nodes of p-y springs (kinematic demand). Finally, 50% of the inertial load was applied at pile head. The pushover curve in the liquefied conditions is shown on Figure 5. The pushover curve in the nonliquefied condition is shown for comparison.
Figure 5. Pushover curve in liquefied and nonliquefied conditions

6
3.2.1.4 Comparison of Pile Demands from Caltrans/ODOT ESA Method and NDA Results
Figure 6 shows the accuracy of the Caltrans/ODOT method in estimating pile demands by comparing pile head displacements estimated from ESA with those computed from NDA. For cases where the inertial load in liquefied conditions (50% of inertia in nonliquefied conditions) was smaller than the ultimate pushover load (i.e. 1290 kN), the Caltrans/ODOT method slightly underestimated pile demands. This is evident from the data points plotted just below the 1:1 line on Figure 6. However, those cases where the inertial load exceeded the ultimate pushover load (inelastic piles) could not be analyzed. This is because the application of inertia in the Caltrans/ODOT method is load-based. These cases are all plotted at 1 meter on Figure XYZ for plotting purposes. While most design codes prohibit inelastic deformations in piles under the ground (e.g. ODOT GDM 2014), this performance criterion is costly and sometimes impossible to achieve. This is especially true in cases where a thick non-liquefiable crust overlies a liquefiable layer. In the next section, a new ESA method is proposed to estimate inelastic demands in piles, specifically for long-duration earthquakes.
Figure 6. Comparison of the maximum pile head displacement in liquefied condition estimated from the Caltrans/ODOT equivalent static analysis (ESA) method (100% kinematic + 50% inertia) with the results of nonlinear dynamic analysis (NDA)
3.2.2 Proposed ESA Method
3.2.2.1 Extension of the ESA to Inelastic Demands
As described in the previous section, the application of the Caltrans/ODOT method is limited to elastic piles, i.e. cases where 50% of inertia is smaller than the ultimate pushover force in liquefied conditions. To extend the ESA to inelastic piles, a similar approach to the one used in the nonliquefied conditions was adopted in this study and its effectiveness was evaluated against NDA results. The initial stiffness of the liquefied pushover curve was linearized using the point corresponding to 75% of the ultimate pushover force, from which an elastic displacement demands are calculated. The elastic displacement demands were then converted to inelastic displacement demands following the equal-displacement assumption for long-period structures (ATC-32 1996). This process is shown on Figure 7 and formulated in Equation 1:
∆ ∆multiplier elastic inertia innonliq.case
initial linear stiffness of pushover curve (1)
Dis
p (
m)
- E
SA

7
where, ΔLiq is the pile head displacement in the liquefied condition due to the combination of lateral spreading and inertial demands, and ΔLS is the pile head displacement due to kinematic demands only. The multiplier in the equation above denotes the fraction of inertia that should be combined with kinematic demands. This multiplier is equal to 50% in the Caltrans/ODOT method and 60%/75% in the proposed ESA method as described in the next section.
Figure 7. Estimating inelastic demands from liquefied pushover curve using the equal-displacement assumption for long-period structures
3.2.2.2 The Choice of Inertia Multiplier
As described earlier, the Caltrans/ODOT method combines 100% of kinematics with 50% of inertia. The inertia multipliers were back-calculated from the NDA results using Equation 1 and are plotted on Figure 8. The figure shows the dependence of inertia multiplier to the ground motion duration (D5-95). The geometric mean of the back-calculated multipliers was approximately 60% for the crustal motions (with D5-95 < 20 sec) and 75% for the subduction motions (with D5-95 > 20 sec).
Figure 8. Dependence of the inertia multiplier (back-calculated from dynamic analyses) to ground motion duration (D5-95) for subduction and shallow crustal earthquakes
0 20 40 60 80 100
Duration, D5-95 (sec)
0
0.5
1
1.5
2
Bac
k-ca
lcu
late
d In
erti
a M
ult
iplie
r
Crustal (pulse)
Crustal
Subduction (intraslab)
Subduction (interface) Mean value for subductionearthquakes (medium tolong duration) ~0.75
Mean value for crustal earthquakes(short duration) ~0.6

8
3.2.2.3 Proposed ESA
The proposed ESA method consists of the following steps: (1) Apply kinematic demands by imposing soil displacements to the end-nodes of p-y springs to get ΔLS. Soil displacements can be estimated from simplified procedures, e.g. Idriss and Boulanger (2008). Modify the p-y springs in the liquefied layer, and adjacent layers, using p-multipliers obtained from Caltrans (2012). (2) Estimate the target displacement in the liquefied condition (ΔLiq) from Equation 1. (3) Perform ESA by combining inertia and kinematics as following:
100% Kinematic + 60% Inertial (for crustal earthquakes with short duration) 100% Kinematic + 75% Inertial (for subduction earthquakes with medium to long duration)
3.2.2.4 Comparison of Pile Demands Estimated using the Proposed ESA Method and the NDA Results
Figure 9 shows the comparison of estimated pile demands using the proposed ESA approach with those computed from the dynamic analyses (NDA). This comparison provides a measure of accuracy for the proposed ESA method. The primary improvement of the proposed ESA method over the Caltrans/ODOT method is the adoption of the equal-displacement approach to convert elastic demands to inelastic demands. While the ESA results compare reasonably well with the NDA results for displacements smaller than 0.4 meter, the ESA estimates are unconservative for displacements larger than 0.4 meter. The threshold of 0.4 meter corresponds to the ultimate pushover force in the liquefied condition, beyond which the pile behavior is inelastic (Figure 7). When the displacements are pushed beyond the peak (yield) point on the pushover curve, the pile response becomes very unstable. It is believed that the monotonic nature of the lateral spreading force (crust load) combined with large cyclic inertial loads could excessively, and irrecoverably, deform the pile beyond the yield displacement. Therefore, it is recommended to use the proposed ESA method only for cases where the estimated pile head displacement is smaller than the displacement corresponding to the ultimate pushover force in liquefied conditions (i.e. 0.4 m in this study).
While the proposed ESA method becomes unconservative for displacements beyond the yield point, the method estimates pile demands reasonably well for elastic piles, including a number of cases that performed well in the NDA but could not be analyzed using the Caltrans/ODOT method (i.e. data points on Figure 6 plotted between 0.2 to 0.4 meter on the horizontal axis and at 1 meter on the vertical axis). Additionally, the proposed ESA method provides a means to identify deformations beyond which the pile response becomes unstable and potentially unconservative. For these cases, an equivalent static analysis (ESA) does not accurately predict the pile demands and nonlinear dynamic analysis (NDA) is required.
Figure 9. Comparison of the maximum pile head displacements estimated using the proposed equivalent static analysis (ESA) method with the nonlinear dynamic analysis (NDA) results.
0 0.2 0.4 0.6 0.8 1 1.2
Disp (m) - NDA
0
0.2
0.4
0.6
0.8
1
1.2
Dis
p (
m)
- E
SA
Portland MCER Matched
Portland AASHTO Matched
Portland MCER Scaled
Portland AASHTO Scaled
Astoria MCER Scaled
Astoria AASHTO Scaled
Max Pile Head Displacement in Liq. Condition(using Proposed ESA)

9
4. DISCUSSION
The back-calculated inertia multipliers that are shown in Figure 8 provide a quantifiable measure of how inelastic pile demands increase due to the combination of inertia and kinematics. Two cases are selected to illustrate the effects of motion duration on the inertia multiplier. Case A corresponds to 1992 Cape Mendocino EQ (CPM station) which is a crustal short-duration motion (D5-95 = 5 sec). Case B corresponds to 2011 Tohoku EQ (MYGH06 station) which is a subduction long-duration motion (D5-95 = 77 sec). Both motions were spectrally matched to MCER design spectra for the Portland site. Therefore, both motions have similar PGA (0.5 g) and similar spectral ordinates at the natural period of the structure (Sa(T=1.36 sec) = 0.28 g). As a result, both motions result in similar maximum inertial load (2260 kN in MYGH06 and 2350 kN in CPM) and similar maximum pile head displacements in the nonliquefied NDA (0.15 m in MYGH06 and 0.19 m in CPM). However, the maximum pile head displacement in liquefied conditions is amplified in the case of MYGH06 (0.27 m) compared to CPM (0.22 m). This amplification results in a larger inertia multiplier for MYGH06 compared to CPM (80% vs. 60%, back-calculated from Equation 1 using ΔLS = 0.04 m). The larger inertia multiplier implies that some constructive interaction between inertial and kinematic loads amplifies pile demands, specifically in long-duration motions. This effect is shown on Figure 10 by comparing the moment-curvature response in the plastic hinge for CPM motion (short duration) and MYGH06 (long duration). This figure shows how the incremental yielding in pile amplifies inelastic demands during long-duration motions. The increased inelastic demand is accounted for by using inertia multiplier = 75% for subduction earthquakes in the proposed ESA method.
Figure 10. Comparison of moment-curvature behavior in the plastic hinge for a long and short duration motions both spectrally matched to the MCER design spectrum developed for the Portland site
5. CONCLUSIONS
Effective-stress, nonlinear dynamic analyses (NDA) were performed for a large-diameter (2 meters) RC shaft in sloped liquefying ground. The NDA were performed for a suite of subduction and crustal earthquake motions covering a wide range of durations to evaluate how inertia and lateral-spreading loads combine in short vs. long duration earthquakes. The dynamic analyses were performed for both nonliquefiable conditions (without pore-water-pressure generation) and liquefied conditions (with PWP generation and liquefaction-induced lateral spreading). The NDA results were used to evaluate current equivalent static analysis (ESA) method by Caltrans/ODOT and develop a new ESA method.
The NDA results showed that pile demands increase in liquefied conditions compared to nonliquefied conditions due to the interaction of inertia (from superstructure) and kinematics (from liquefaction-induced lateral spreading). Comparing pile demands estimated from ESA recommended by Caltrans/ODOT with those computed from NDA showed that the guidelines by Caltrans/ODOT (100% kinematic combined with 50% inertia) slightly underestimates demands for piles that remain elastic (where 50% of inertia is less than the ultimate pushover force in liquefied conditions). A new ESA method was developed to extend the application of the Caltrans/ODOT method to inelastic piles. The inertia multiplier
Acc
. (g
)
Mo
men
t (k
N.m
)
Acc
. (g
)

10
was back-calculated from the NDA results and new multipliers were proposed: 100% Kinematic + 60% Inertia for crustal earthquakes and 100% Kinematic + 75% Inertia for subduction earthquakes. The proposed ESA compared reasonably well against the NDA results for elastic piles. It also made possible to estimate demands in piles that performed well in the dynamic analyses but could not be analyzed using Caltrans/ODOT method (i.e. inelastic piles that remained below Fult on the liq pushover curve). However, it was observed that the pile demands became unpredictable for cases where the pile head displacement exceeded the displacement corresponding to the ultimate pushover force in liquefied conditions. Nonlinear dynamic analysis is required for these cases to adequately estimate pile demands.
6. ACKNOWLEDGEMENTS
Funding was provided by the Deep Foundation Institute. The authors appreciate the comments by the project advisory board: Dr. Zia Zafir, Dr. Azadeh Bozorgzadeh and Professor Anne Lemnitzer.
7. REFERENCES AASHTO (2014). “Guide Specifications for LRFD Seismic Bridge Design.” Second Edition with 2014
Interim, AASHTO, Washington, D.C. American Petroleum Institute (2000). “Recommended Practice for Planning, Designing, and Constructing
Fixed Offshore Platforms.” API recommended practice 2A-WSD (RP 2AWSD), 21st Edition, API. ASCE/COPRI 61-14 (2014). “Seismic Design of Piers and Wharves, prepared by the ASCE Standards
Comm. on Seismic Design of Piers and Wharves.” ASCE, Reston, VA. Ashford, S.A., Scott, M.H., and Rayamajhi, D., (2012). “Reducing Seismic Risk to Highway Mobility:
Assessment and Design Examples for Pile Foundations Affected by Lateral Spreading”, ODOT Report. Boulanger, R.W., Chang, D., Brandenberg, S.J., Armstrong, R.J., and Kutter, B.L. (2007). “Seismic design
of pile foundations for liquefaction effects.” 4th International Conference on Earthquake Geotechnical Engineering, The Netherlands, 277-302.
Brandenberg, S.J., Zhao, M., Boulanger, R.W., and Wilson, D.W. (2013). “p-y Plasticity Model for Nonlinear Dynamic Analysis of Piles in Liquefiable Soil.” ASCE JGGE, 139(8), 1262-1274.
California Department of Transportation (Caltrans) (2012). “Guidelines for Foundation Loading and Deformation Due to Liquefaction Induced Lateral Spreading.” Sacramento, CA.
Idriss, I. M., and Boulanger, R. W., (2008). Soil liquefaction during earthquakes, Monograph MNO-12. Earthquake Engineering Research Institute, Oakland, CA, 261 pp.
Khosravifar, A., and Boulanger, R. W., (2010). Inelastic Response of Extended Pile Shafts in Laterally Spreading Ground during Earthquakes. Deep Foundation Institute J. 4, 2, 41-53.
Khosravifar, A., Boulanger, R.W., and Kunnath, S.K. (2014a). “Effects of Liquefaction on Inelastic Demands of Bridge Pile Shafts.” Earthquake Spectra, 30 (4), pp, 1749-1773.
Mazzoni, S., McKenna, F., Scott, M. H., and Fenves, G. L., (2009). Open system for earthquake engineering simulation user manual. University of California, Berkeley.
MCEER/ATC (2003) “Recommended LRFD Guidelines for the Seismic Design of Highway Bridges.” MCEER/ACT 49, Multidisciplinary Center for Earthquake Engineering/Applied Technology Council Joint Venture, University at Buffalo, Buffalo, NY.
McGann, C. R., Arduino, P., and Mackenzie-Helnwein, P., (2011). “Applicability of conventional p-y relations to the analysis of piles in laterally spreading soil.” J. Geotech. Geoenv. Eng. 137, 6, 557-567.
Mejia, L.H., and Dawson, E.M. (2006). “Earthquake Deconvolution for FLAC.” Proceedings of Fourth International FLAC Symposium on Numerical Modeling in Geomechanics, Madrid, Spain.
Oregon Dept. of Transportation (2014). Geotechnical Design Manual. Tech. Services Branch, Salem, OR Tokimatsu, K., Suzuki, H., Sato, M. (2005). “Effects of inertial and kinematic interaction on seismic
behavior of pile with embedded foundation.” Soil Dyn. Earthquake Eng. 25, 753-762. Washington Dept. of Transportation (WSDOT) (2015). “Geotech Design Manual.” M 46-03.11, May 2015 Yang, Z., Elgamal, A., and Parra, E., (2003). “Computational model for cyclic mobility and associated
shear deformation.” J. Geotech. Geoenviron. Eng, 129, 12, 1119-1127.

11
APPENDIX A: GROUND MOTIONS
A.1. SELECTED GROUND MOTIONS
Table A1: Selected Ground Motions for the Portland (OR) Site
2011
Tohoku, Japan
2010 Maule, Chile
2001 El Salvador
1978 Tabas, Iran
1985 Nahanni, Canada
1992 Cape Mendocino,
CA
1989 Loma Prieta, CA
Station Tajiri
(MYGH06)
Cerro Santa Lucia (STL)
Acajutla Cepa (CA)
Tabas (TAB)
Site 1 Cape
Mendocino (CPM)
Los Gatos-Lex. Dam
(LEX)
Component NS 360 90 T1 1280 00 90
Magnitude 9.0 8.8 7.7 7.35 6.76 7.01 6.93
Rupture Distance
(km) 63.8 64.9 151.8* 2.05 9.6 6.96 5.02
Vs30 (m/s)
593 1411 Intermediate
Intrusive Rock
767 605 568 1070
Rupture Mechanism
Subduction (Interface)
Subduction (Interface)
Subduction (Intraslab)
Crustal (Reverse)
Crustal (Reverse)
Crustal (Reverse)
Crustal (Reverse Oblique)
Seed Motion D5-
95 (sec) 85.5 40.7 27.2 16.5 7.5 9.7 4.3
Seed Motion PGA(g)
0.27 0.24 0.10 0.87 1.25 1.51 0.41
MCER Scale
Factor 1.38 1.85 3.61 0.51 0.42 0.32 1.11
AASHTO Scale
Factor 0.86 1.16 2.26 0.32 0.26 0.2 0.69
*hypocentral distance

12
Table A2: Selected Ground Motions for the Astoria (OR) Site
2011
Tohoku, Japan
2011 Tohoku, Japan
2010 Maule, Chile
2010 Maule, Chile
1985 Mexico City,
Mexico
2015 Illapel, Chile
2001 Arequipa,
Peru
Station Tajiri
(MYGH06) Matsudo
(CHB002)
Cien Agronomica
s (ANTU)
Cerro Santa Lucia (STL)
La Union (UNIO)
Talagante (TAL)
Moquegua (MOQ)
Component NS NS NS 360 N00W 90 NS
Magnitude 9.0 9.0 8.8 8.8 8.0 8.3 8.4
Rupture Distance
(km) 63.8 356.0* 64.6 64.9 83.9* 140.9 76.7
Vs30 (m/s)
593 325** 621 1411 Meta-
Andesite Breccia
1127 573
Rupture Mechanism
Subduction (Interface)
Subduction (Interface)
Subduction (Interface)
Subduction (Interface)
Subduction (Interface)
Subduction (Interface)
Subduction (Interface)
Seed Motion D5-95 (sec)
85.5 47.1 38.5 40.7 24.2 76.4 36.0
Seed Motion PGA(g)
0.27 0.29 0.23 0.24 0.17 0.065 0.22
MCEr Scale Factor
2.35 3.00 2.75 3.00 4.50 10.20 3.10
AASHTO Scale Factor
1.40 1.60 1.80 1.80 2.75 6.50 1.90
*hypocentral distance **Vs20

13
A.2. TARGET DESIGN SPECTRA DEVELOPED PER AASHTO (975-YEAR) AND ASCE 7-10 (MCER) FOR SITE 1 (PORTLAND, OR) AND SITE 2 (ASTORIA, OR)
Figure A1. Comparison of Final MCER and AASHTO Target Spectra for Site 1 (Portland) and Site 2 (Astoria)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
0.01 0.1 1 10
Sa
(g)
Period (s)
Portland MCEr Target
Portland AASHTO Target
Astoria MCEr Target
Astoria AASHTO Target
5% dampingVs=760 m/s

14
A.3. ACCELERATION RESPONSE SPECTRA FOR SCALED AND MATCHED GROUND MOTIONS
Figure A2. Individual ground motion spectra, scaled to the MCER (left) and AASHTO (right) target spectra for the Portland Site
Figure A3. Individual ground motion spectra, scaled to the MCER (left) and AASHTO (right) target spectra for the Astoria Site
0.001
0.01
0.1
1
10
0.01 0.1 1 10
Sa
(g)
Period (s)
MCEr Target MYGH06 NS
STL 360 CA 90
TAB T1 Site 1 1280
CPM 00 LEX 90
GeoMean MCEr Target +15%
Portland MCER Scaled
5% dampingVs=760 m/s
0.001
0.01
0.1
1
10
0.01 0.1 1 10S
a (g
)
Period (s)
AASHTO Target MYGH06 NS
STL 360 CA 90
TAB T1 Site 1 1280
CPM 00 LEX 90
GeoMean AASHTO Target+15%
AASHTO Target-15%
5% dampingVs=760 m/s
Portland AASHTO Scaled
0.01
0.1
1
10
0.01 0.1 1 10
Sa
(g)
Period (s)
MCEr Target MOQ NS
GeoMean MYGH06 NS
TAL 90 ANTU NS
STL 360 CHB002 NS
Union N00W MCEr Target +15%
MCEr Target-15%
5% dampingVs=760 m/s
Astoria MCER Scaled
0.01
0.1
1
10
0.01 0.1 1 10
Sa
(g)
Period (s)
AASHTO Target MOQ NS
GeoMean MYGH06 NS
TAL 90 ANTU NS
STL 360 CHB002 NS
Union N00W AASHTO Target+15%
AASHTO Target-15%
5% dampingVs=760 m/s
Astoria AASHTO Scaled

15
Figure A4. Individual ground motion spectra, spectrally matched to the MCER (left) and AASHTO (right) target spectra for the Portland Site
0.001
0.01
0.1
1
10
0.01 0.1 1 10
Sa
(g)
Period (s)
Target Port-MCER (g)
'MYGH06-NS'
'STL-360'
'CA-90'
'TAB-T1'
'Site1-1280'
'CA-90'
'LEX-90'
Geomean
Target + 15%
Target - 15%
5% dampingVs=760 m/s
Portland MCER Matched
0.001
0.01
0.1
1
0.01 0.1 1 10
Sa
(g)
Period (s)
Target Port-AASHTO (g)
'MYGH06-NS'
'STL-360'
'CA-90'
'TAB-T1'
'Site1-1280'
'CA-90'
'LEX-90'
Geomean
Target + 15%
Target - 15%
5% dampingVs=760 m/s
Portland AASHTO Matched

16
APPENDIX B: EXAMPLE NONLINEAR DYNAMIC ANALYSIS (NDA) RESULTS
Figure B1. Representative Nonlinear Dynamic Analysis (NDA) results for the 2010 Maule EQ (Station STL) scaled by a factor of 1.16 for the AASHTO design spectrum developed for the Portland site.
Dis
p. (
m)
Lo
ad (
kN)
r uA
cc. (
g)
Dis
p. (
m)
Lo
ad (
kN)

COMPARISON OF BOREHOLE ULTRASOUND AND BOREHOLE RADAR IN EVALUATING THE LENGTH OF TWO UNKNOWN BRIDGE FOUNDATIONS Joseph T. Coe, Temple University, Philadelphia, Pennsylvania Behnoud Kermani, The Pennsylvania State University, University Park, Pennsylvania Lorraine Sybrandy, Temple University, Philadelphia, Pennsylvania Peter H. Berg, The Pennsylvania Department of Transportation, King of Prussia, Pennsylvania Sarah E. McInnes, The Pennsylvania Department of Transportation, King of Prussia, Pennsylvania
Foundation length is an important parameter when assessing bridge vulnerability to failures related to scour hazards. As a result, multiple non-destructive testing (NDT) methods have been developed to evaluate the geometry of unknown foundations, each with their own advantages and disadvantages. Subsurface methods that rely on measurements from boreholes alongside the foundation are often the most robust when evaluating foundation length, particularly for complex foundations (e.g. footings supported on piles). In this study, such a system was developed to evaluate the length of foundations at two bridge sites in Philadelphia using ultrasound acoustic waves (i.e. P-waves). Characteristics of the foundations and the site conditions are summarized as well as the ultrasound system components. The system was lowered in a borehole alongside each foundation as 100 kHz P-waves were generated to develop a reflection image of the pile-soil interface. Foundation length was evaluated based on discontinuity of the reflected signals with depth. This ultrasound system was developed to address inadequacies with borehole radar testing in similar applications related to unknown foundations. In particular, borehole radar has limited capabilities in clayey soil profiles, where high values of electrical conductivity limit radar signal strength. A commercial borehole radar system (MALÅ 250MHz ProEx) was therefore utilized at both bridge sites to provide a comparison of results using both systems.
Introduction Arneson et al. (2012) estimates that there are more than 40,000 bridges across the United States with unknown foundations. Various characteristics of these foundations may be unknown, including geometry, material type, and/or load carrying capabilities. As such, these bridges present a unique challenge to engineers, particularly with regards to estimating scour vulnerability. Moreover, foundations are often reused in cases where bridges are rehabilitated or widened. Finally, as sustainable engineering practices continue to increase in importance, there is growing interest in the reuse of foundation to decrease the environmental footprint of projects and to save on material costs. In each of these cases, the costs and difficulties of evaluating foundation characteristics via excavations (i.e. “positive discovery”) often render this approach impractical. As a result, non-destructive testing (NDT) methods have been typically utilized to
evaluate unknown foundations. The most comprehensive of NDT studies for unknown foundations was summarized by Olson et al. (1998) and Olson and Aouad (2001). Since Olson and Aouad (2001), the Federal Highway Administration (FHWA) has implemented policies that categorize unknown foundations bridges as “Scour Critical” and subject to development of an appropriate Plan of Action (POA) for inspections, scour monitoring, potential installation of scour countermeasures, and instructions for bridge closures if necessary. Risk-based approaches have been implemented by several states to develop these management plans (e.g. McLemore et al. 2010). However, for critical structures, the high risks associated with potential scour failures may necessitate field investigations to evaluate foundation properties, particularly the depth to bottom. As a result, these recent FHWA policies have prompted a resurgence of studies regarding NDT methods to address deficiencies in predictions of foundation characteristics (e.g. Jo et al., 2003;

Jalinoos et al., 2006; Hertlein and Walton, 2007; Yu et al., 2007; Robinson and Webster, 2008; Descour and Kabir, 2010; Briaud et al., 2012). Previous NDT studies have often demonstrated that subsurface methods in boreholes alongside the foundation are the most robust when evaluating foundation length, particularly for complex foundations (e.g. footings supported on piles). The most common subsurface methods include Parallel Seismic (PS), Cross-Hole Sonic Logging (CSL), Borehole Magnetometer (BM), Induction Field (IF), and Borehole Radar (BHR). Wightman et al. (2003) provides a good summary of the theoretical background and necessary layout/equipment for these methods. Very few studies have focused on the potential use of P-wave reflection imaging within a single borehole for foundation characterization, despite potential key advantages it holds over these other common subsurface NDT methods. For example, CSL is a similar application, but it is more complex, time-consuming, and costly since it relies on measurements from multiple boreholes on either side of the foundation. The PS method suffers when there is no direct access to impact the foundation element in question, particularly at sites with high background seismic noise (e.g. nearby traffic). BM and IF are only useful when the foundation contains a significant amount of continuously connected steel. Finally, BHR is ineffective in clay soils as clays have high electrical conductivity, which increases attenuation of the radar waves. In this study, we developed a Borehole Ultrasound (BHU) system was developed to potentially address several of the issues with the aforementioned NDT methods. The system utilizes 100 kHz P-waves to develop a reflection image of the foundation element (Figure 1). The system operates within a single borehole, locates the source and receiver at the same depth to increase signal-to-noise ratio (SNR), can potentially sense reflections from all foundation materials (e.g. steel, timber, concrete), and can operate in clayey soils. In this study, the BHU system was initially tested in the laboratory to mimic potential field conditions and ensure appropriate operation. The system was then deployed at two field sites to evaluate its effectiveness in characterizing depth to foundation bottom. The results using the BHU system was compared to similar testing using a commercial BHR system at each of the site. The BHR system was selected as it represents the current state of practice and is most similar in
operation to the BHU system.
Figure 1. Schematic of borehole ultrasonic (BHU) P-wave imaging system. P-wave Reflection Imaging The use of P-waves is well documented in fields ranging from medical ultrasound to exploratory geophysics. However, despite their use in civil engineering NDT applications, few studies have focused on the use of P-waves for direct geotechnical purposes, including for imaging bridge substructures. The primary geotechnical application of P-waves has often been limited to shallow geophysical explorations with lower frequency waves (e.g. Grandjean, 2006; Kase and Ross, 2004; and Nichols et al., 1988). In the case of unknown foundations, Olson and Aouad (2001) documented two borehole P-wave systems that were developed to operate at the sonic range of frequencies (i.e. less than 20 kHz). One was based on an OYO Corporation P-S suspension logging system and another was a custom solenoid hammer and geophone system developed at the University of Texas. In both cases, the results were largely ineffective. The OYO system was better suited for its original intended purpose of measuring P- and S-wave velocities along the borehole wall because the majority of the energy was directed downward along the borehole wall instead of horizontally to the foundation (Olson et al., 1998). The University of Texas system generated low frequency waves that were only capable of detecting reflections from very large diameter [i.e. 3 m (10 ft)] foundation elements (Olson et al., 1998). In terms of more promising results, Descour and Kabir (2010) showed that pile bottoms could be identified using

tomographic inversion of reflected P-wave signals from a custom borehole system consisting of a swept frequency seismic source and a string of hydrophones. Coe and Brandenberg (2012) demonstrated the use of ultrasonic 100 kHz P-waves to image the vertical profile of a cast-in-steel-shell concrete pile. These previous studies demonstrate that the use of P-waves shows promise in applications for unknown foundations. However, factors related to P-wave propagation in soils must be addressed, particularly as related to system resolution and wave propagation distance. For example, the results from Olson et al. (1998) demonstrated that higher frequency P-waves are desirable to increase system resolution and detect reflections from smaller foundation elements [e.g. less than 0.5 m (1.6 ft) diameter]. Descour and Kabir (2010) also supported this conclusion as the results from their tomographic inversion of low frequency P-waves fused the multi-pile structure in their study into a larger monolithic feature. An added benefit of the increased resolution offered by high frequency (e.g. ultrasonic) P-waves is the potential ability to assess foundation material type, integrity, and geometry in addition to length. For example, Coe and Brandenberg (2012) used 100 kHz P-waves and were able to deduce pile drift and/or batter based on the acquired reflection signals. However, the fundamental drawback to high frequency P-waves is that they attenuate drastically over shorter distances in soils, rendering them incapable of propagating long distances. In this study, development was continued for the custom ultrasonic P-wave system discussed in Coe and Brandenberg (2012) to evaluate its effectiveness in unknown foundation investigations. In particular, the system was modified to allow it to be lowered into a PVC-cased, water-filled borehole instead of pushed into the ground by a cone penetration testing (CPT) rig. Since the transducers will be in direct contact with water within the borehole, this revised field protocol should address previous limitations with transducer coupling that negatively affected the results in Coe and Brandenberg (2012). Additionally, as there is a tradeoff between resolution and signal penetration, part of the goals of this study were to examine the limits of wave propagation for ultrasonic P-waves. The primary system components include a pair of ultrasonic
transducers (100 kHz), a source pulser, a miniature direct current/direct current (DC-to-DC) converter, a receiver amplifier, a receiver analog filter, a terminal block (SCB-68), a data acquisition cards mounted in a National Instruments PXIe chassis, and a personal computer. More details about the specifications of each system component and the command chain flow are provided in Coe and Brandenberg (2012). Laboratory Testing Prior to field deployment, a set of laboratory tests on saturated soil models were performed as a proof-of-concept effort to examine the propagation distances of 100 kHz waves. The results from Coe and Brandenberg (2012) showed that the waves were capable of propagating a two-way distance of 0.8 m (2.6 ft) in the field. However, the limits for this propagation distance were not investigated. Moreover, the additional PVC interface in this study relative to Coe and Brandenberg (2012) can potentially decrease the amplitude of input and received signals. This is because the additional interface presents another impedance contrast where the waves can be partially reflected prior to input into the surrounding soils. As a result, laboratory tests provided guidance regarding selection of borehole location so that the ultrasound probe was located an appropriate distance away from the foundation elements. Figure 2 presents the experimental setup and vacuum chamber in which the laboratory soil model in this study was constructed and saturated. Multiple items were embedded in the sand model during construction. Cross section AA’, which will be the focus of this paper, contained two steel plates at different depths within the container (Figure 2). A 0.6 cm (0.25 in) PVC sheet was placed on the sand to mimic the interface within the PVC-cased borehole in the field. The ultrasound probe was dragged horizontally along the surface to produce vertically propagating P-waves. A vertical propagation direction was selected because the vertical dimension was largest for the vacuum container. This assured we were testing the limits of P-wave propagation in this model. This laboratory test setup mimics the field setup if rotated by 90 degrees.

(a)
(b)
Figure 2. Laboratory testing: (a) experimental setup and vacuum chamber with soil model; and (b) cross section AA’. Figure 3 presents the results from laboratory testing on cross section AA’. The raw signals were linearly mapped into a pseudocolor (checkerboard) plot using a red/blue colormap. The resulting image was then adjusted for contrast, which corresponds to eliminating data below a certain threshold to focus on amplitude spikes. Signal stacking was used to increase SNR. In order to better compare the results from this laboratory testing to the field tests, the figure presents propagation distance away from the transducer faces (i.e. depth) on the x-axis (i.e. the results are rotated by 90 degrees). The results have been band-pass filtered between approximately 75 – 110 kHz to focus on the
central operating frequency of the transducers. Additionally, automatic gain control (AGC) has been applied to normalize signal amplitudes from distant reflectors. A number of items can be noted from the results in Figure 3. Both the PVC/soil interface and the embedded steel plates are clearly visible. The edges of the embedded steel plates are estimated to be located at approximately 0.25 m and 0.34 m along the scan axis, which correspond well to the actual locations from construction notes (i.e. 0.235 m and 0.362 m). This demonstrates that the depth to foundation bottom can potentially be resolved to within centimeters, though this will be limited by the coarser measurement interval selected for the scan axis in field testing. Nevertheless, the limitation in the field will be related to data acquisition parameters and not the transducer hardware itself. Finally, a set of reflection signals is noted at approximately 0.9 m from the transducers. These signals likely represent the bottom of the container since the transducer distance axis is approximated using an assumed composite P-wave velocity of 1500 m/s for all materials through which the wave propagate. This represents a two-way travel distance of approximately 1.8 m (5.9 ft), more than double what was seen in Coe and Brandenberg (2012) despite the additional PVC interface. Moreover, when plotting the results for much farther distances from the transducers (not shown in Figure 3), there is some evidence to suggest that reflections are present in the records. These reflections may represent wave signals that travel back and forth through the model multiple instances. However, these reflections signals are very difficult to distinguish above the noise threshold. Thus the 1.7 m (5.6 ft) two-way travel distance can be considered a good lower bound estimate for the max propagation distance of 100 kHz P-waves in this model and for potential field applications. Field Testing Once the proof-of-concept laboratory studies were complete and demonstrated the viability of the method, the ultrasound P-wave system was deployed at two bridge sites to estimate foundation lengths. Each site was operated by the Pennsylvania Department of Transportation (PennDOT) and located in Philadelphia along Interstate 95 (Figure 4).

Figure 3. Laboratory test results along cross section AA’. Unfortunately, due to the size of the ultrasound probe, augers could not be utilized to create the single borehole for testing alongside the foundation at each site. Augers would result in either a hole that was too small for the necessary 140 mm (5.5 in) Schedule 40 PVC casing or a hole that required an excessive amount of backfill for the space between the pipe and borehole wall. As a result, the boreholes were drilled by advancing a 150 mm (6 in) outer-diameter steel casing attached to a hollow coring bit. Drilling fluid was flushed inside the hollow center of the casing to flush away spoils. The use of a large coring bit and the presence of loose sands at the site resulted in difficult drilling conditions, particularly after the hole was left partially installed overnight. Unfortunately, this resulted in terminating the boreholes short of the desired 3.0 m (10.0 ft) embedment into bedrock. At the Betsy Ross Bridge Interchange (BR0) field site, this meant the installed borehole was likely short of the depth to foundation bottom. At the Girard Avenue Interchange (GR3), the borehole was closer to the bottom of the tested foundation, though likely too short to be able to notice breaks in the continuity of the P-wave and radar signals used in field testing. Therefore, field testing was expected to provide lower bound estimates of depths to foundation bottom at both sites. At BR0 the final location of the borehole was approximately 0.5 m (1.8 ft) away from the pile cap in between two of the battered outer
piles. The target pile was located approximately 2.1 m (7.0 ft) away from the final borehole location. This site represented the extreme limits of potential 100 kHz P-wave propagation based on the results from laboratory testing. At GR3 the final location of the borehole was approximately 0.6 m (2.0 ft) away from the pile cap in line with the outer pile on the pier column centerline. The target pile was located approximately 0.9 m (3.0 ft) away from the final borehole location, well within the established range of wave propagation for the 100 kHz signals as tested in laboratory conditions. Figure 5 provides a schematic of the foundation and borehole geometry at both test sites. Field testing at both sites consisted of data acquisition with both the custom BHU system developed in this study and a commercial BHR system. The commercial BHR system was a 250 MHz MALÅ Geoscience borehole antenna with a ProEx control unit. BHR was selected as it generates data comparable to the ultrasonic P-wave system, except radar waves are utilized. Thus, BHR allows a good comparison of the relative merits of the P-wave system based on the current standard-of-practice. Moreover, since the true foundation depths were not completely known at both sites, it proved necessary to utilize multiple methods to corroborate results.

(a)
(b)
(c)
(d)
Figure 4. Field test sites: (a) BR0 location (courtesy of Google Maps ®); (b) BR0 foundation; (c) GR3 location (courtesy of Google Maps ®); (d) GR3 foundation.
(a)
(b)
Figure 5: Locations of boreholes for field testing: (a) BR0; and (b) GR3. Results and Analysis Figure 6 illustrates the results from P-wave BHU testing. All signal traces were acquired at depths below the water table at each site. An average P-wave velocity of 1500 m/s (4920 ft/s) was assumed for these saturated soils. Data was acquired at a 0.3 m (1.0 ft) depth interval, except at GR3 where the interval was switched to 0.75 m (2.5 ft) at a depth of 10.7 m (35.0 ft) due to
time constraints. The strong reflection signal in the initial segment of the record is a result of the direct arrival and multiple reflections from the PVC wall that lined the borehole. As soil is highly attenuative, it is extremely beneficial to ensure as much energy as possible is transferred into the soil surrounding the borehole. For that reason, signal stacking was utilized to increase SNR. A total of 1200 stacks were generated at each trace depth. As in the

laboratory, a band-pass filter was applied to the results to highlight the strongest frequency band of the system (i.e. approximately 75 kHz – 110 kHz). Both records show evidence of potential reflections from foundation elements, though the results are more promising at GR3 than BR0. For example, note the series of reflection traces located approximately 0.75 m (2.5 ft) away from the transducers between depths of 2 m – 4 m (6.6 ft – 13.1 ft) and at 0.85 m (2.8 ft) between depths of 6 m – 9 m (1.8 ft – 2.75 ft) at GR3. Compare those results to BR0 where there is limited evidence of faint reflections at approximately 4.5 m (14.8 ft) and 8 m (26.3 ft) depth and 1.8 m (5.9 ft) and 1.7 m (5.6 ft) away from the transducers, respectively. These reflection signals are extremely difficult to interpret over noise in the record, signifying that propagation limits were reached at BR0 as was expected based on the lower bound laboratory results. Based on these results, lower bound estimates for the depth to foundation bottom at BR0 and GR3 can be interpreted as 8 m (26 ft) and 9 m (30 ft), respectively. Though these predictions grossly under predict the foundation lengths (as will be noted in the discussion of BHR results), the results still demonstrate how useful information can be generated using this system for engineers who may be interested in either foundation reuse or scour. Even a lower bound knowledge can be extremely beneficial, particularly when distinguishing a spread footing from a pile cap with an underlying pile group. At both sites the P-wave reflection signals do not line up to form obvious continuous reflectors as would be expected for a long linear feature like a pile (e.g. compare Figures 3 and 6). In fact, very little reflection data is obvious for a large number of the recordings. There are a number of potential reasons for these results. The inconsistent distance of the reflection signal may be attributed to rotation of the probe. It was possible that small probe rotations resulted in reflection signals from other piles in the group or caused the input waves to miss the foundation completely. It’s also possible that the anticipated distance between the borehole and test piles was inaccurate since foundation plans can sometimes vary from as-built conditions. Though the results show some promise if the borehole can be located within approximately 1 – 2 m from the test pile, it is evident that multiple items need to be addressed before this method is ready for long term implementation as an unknown foundation NDT tool. For example,
omni-directional transducers should be explored to reduce the sensitivity to transducer direction and probe rotation. Other improvements include utilizing a pulser rated for higher power so that the source transducer is excited with higher energy and inputs wave energy more effectively into the domain of interest. If possible, a mudded open borehole should be tested to note the effects on signal amplitude. The results from BHR testing at both sites are illustrated in Figure 7. The BHR antenna was lowered at a constant 0.05 m (0.16 ft) interval and data was recorded automatically by the control unit. All data was filtered using a band pass filter with a range of 200 MHz – 300 MHz and normalized in amplitude using AGC. At BR0 the resulting reflection signals form a continuous linear feature that represents the tested foundation element. There is a small transition in travel time between 4.2 m – 4.7 m in depth, which corresponds to a transition in the propagation medium outside the borehole from unsaturated soil to saturated soil below the water table. The results at GR3 exhibit some unique features, particularly the gap in reflection information between approximately 2 m – 5 m (6.6 ft – 16.4 ft) in depth and the overall smaller signal amplitudes. The likely explanation for these features is that the soil profile at GR3 was more clay rich, particularly at the depths where no reflections signals were recorded. The omni-directional nature of this source-receiver antenna pair means that there may be some overlapping information from other elements within the pile group at both sites [e.g. note the earlier reflectors in the GR3 results at 11 m (36 ft) depth]. However, we are confident that a foundation length prediction can be generated from the BHR results at both sites, even if some of the reflections signals are from other elements within the foundation group. In both cases, it is evident that the borehole was not drilled sufficiently deep to ascertain the foundation bottom. However, as before with the BHU results, a lower bound estimate can be made of 9.5 m at BR0 and 12.0 m at GR3. Comparing these results with BHU, we find that the BHU system is currently overly conservative in its predictions, which was expected given the current developmental status of the BHU system and the lengths of the boreholes drilled at both sites.

(a)
(b)
Figure 6. Field BHU test results: (a) BR0; and (b) GR3. Conclusions An ultrasonic P-wave imaging system (BHU) was implemented at two bridge sites to determine the length of the foundation elements. The results from P-wave testing were compared to BHR, which represents an established method within the state-of-practice for unknown foundation NDT. Based on these results, the BHU system currently shows limited potential for
imaging the foundation. Depth to foundations bottom predictions at BR0 and GR3 were overly conservative compared to BHR, primarily resulting from the fact that the P-wave reflection signals were not measured consistently. In the laboratory, reflection signals were recorded from as far away as 0.9 m (one-way travel distance) from the transducers and centimeter resolution was possible for reflector positions.

(a)
(b)
Figure 7. Field BHR test results: (a) BR0; and (b) GR3. The 0.9 m one-way travel distance was double what was previously recorded in earlier ultrasonic P-wave geotechnical studies (e.g. Coe and Brandenberg, 2012) and it represents a lower bound limit for 100 kHz P-wave propagation in saturated soils. In the field, reflection signals were recorded from potential reflector positions located as far away as approximately 1.8 m (5.9 ft) from the transducers (one-way distance). Additionally, BHU was successful in recording reflections at GR3 over a depth range that proved impossible for BHR due to high clay content. However, issues related to transducer directivity and the limitations of ultrasonic wave propagation distance prevented accurate assessment of reflector positions and foundation depth at both sites. It is recommended that future revisions to the system incorporate omni-directional transducers and a stronger source pulser to ensure transmission of P-wave energy into the soil surroundings. As an established method, BHR proved more successful at estimating
foundation lengths. However, as previously mentioned high clay contents limited the effectiveness of BHR at one of the sites, though a lower bound estimate of the foundation length was still possible. Given the development status of the BHU system and its performance in relation to BHR, BHU is only recommended for research applications at this time. Acknowledgments This work was sponsored by the Pennsylvania Department of Transportation and the U.S. Department of Transportation, Federal Highway Administration. The contents of this paper reflect the views of the authors, who are responsible for the facts and the accuracy of the data presented herein. The contents do not necessarily reflect the official views or policies of the Federal Highway Administration, U.S. Department of Transportation, or the Commonwealth of Pennsylvania at the time of publication. This paper does not constitute a standard,

specification, or regulation. The authors gratefully appreciate the support of Lisa Tarson of the Pennsylvania Department of Transportation. The authors acknowledge the support from TRC Engineers, Inc., Exploration Instruments, LLC, Northwest Geophysics, and Amber Onufer at MALA Geoscience in Charleston, SC. REFERENCES Arneson, L.A., Zevenbergen, L.W., Lagasse,
P.F., and Clopper, P.E. (2012). “Evaluating Scour at Bridges," Hydraulic Engineering Circular No. 18, Fifth Edition, Publication No. FHWA-HIF-12-003, Federal Highway Administration, Washington, D.C.
Briaud, J., Medina-Cetina, Z., Hurlebaus, S., Everett, T., Tucker, S., Yousefpour, N., and Arjwech, R. (2012) “Unknown Foundation Determination for Scour.” Report No. FHWA/TX-12/0-6604-1, Texas Department of Transportation, Austin, TX.
Coe, J. T. and Brandenberg, S. J. (2010). “P-wave Reflection Imaging of Submerged Soil Models Using Ultrasound.” Journal of Geotechnical & Geoenviromental Engineering, Vol. 136, No. 10, 1358-1367.
Coe, J.T. and Brandenberg, S.J. (2012). “Cone Penetration Test–Based Ultrasonic Probe for P-Wave Reflection Imaging of Embedded Objects.” Journal of Bridge Engineering, Vol. 17, No. 6, 940-950.
Descour, J.M., and Kabir, J.J. (2010) “Imaging Piles in Bridge Foundations Using Tomography and Horizontal Seismic Reflector Tracing.” Proceedings Geo-Florida 2010, West Palm Beach, FL.
Grandjean, G. (2006). “A seismic multi-approach method for characterizing contaminated sites.” J. Appl. Geophys., 58(2), 87 – 98.
Hertlein, B.H., and Walton, W.H. (2007). “Project Experience in Assessment and Reuse of Old Foundations.” Proceedings of Geo-Denver 2007, Denver, CO.
Jalinoos, F., Gibson, A., Diehl, J., Hadfield, P. and Gordon, G. (2006). “Determination of Unknown Length of Sheet Piles Using Three Geophysical Logging Methods” 2006 Highway Geophysics NDE Conference, St. Louis, MO.
Jo, C.H., Cha, Y.H., and Choi, J.H. (2003). “A Borehole Magnetic Logging Tool for Estimating Unknown Foundation Depths.”
2003 Highway Geophysics NDE Conference, Orlando, FL.
Kase, E. J., and Ross, T. A. (2004). “Seismic imaging to characterizesubsurface ground conditions in civil construction.” Proc., Geo-Trans ASCE Special Publication 126, ASCE, Reston, VA, 1823 – 1831.
Lee, J. S., and Santamarina, J. C. (2005). “P-wave reflection imaging.” ASTM Geotechnical Testing Journal, Vol. 28, No. 2, 197–206.
McLemore, S., Zendegui, S., Whiteside, J., Sheppard, M., Gosselin, M., Demir, H., Passe, P., and Hayden, M. (2010). “Unknown Foundation Bridges Pilot Study.” Federal Highway Administration & Florida Department of Transportation.
Nichols, T. C., Jr., King, K. W., Collins, D. S., and Williams, R. A. (1988). “Seismic-re fl ection technique used to verify shallow rebound fracture zones in the Pierre Shale of South Dakota.” Can. Geotech. J., 25(2), 369 – 374.
Olson, L.D., and Aouad, M.F. (2001). “Unknown Subsurface Bridge Foundation Testing, NCHRP Project 21-05(2) Final Report.” National Cooperative Highway Research Program (NCHRP), Transportation Research Board, Washington, D.C.
Olson, L., Jalinoos, F., and Aouad, M.F. (1998). “Determination of Unknown Subsurface Bridge Foundations: A Summary of the NCHRP 21-5 Interim Report.” Geotechnical Engineering Notebook, Geotechnical Guideline No. 16, Federal Highway Administration, Washington, D.C.
Robinson, B., and Webster, S. (2008). “Successful Testing Methods for Unknown Bridge Foundations.” Proceedings of The Fifth Highway Geophysics NDE Conference, Charlotte, NC.
Wightman, W.E., Jalinoos, F., Sirles, P., and Hanna, K. (2003) “Application of Geophysical Methods to Highway Related Problems.” Federal Highway Administration, Central Federal Lands Highway Division, Lakewood, CO.
Yu, X., Fang, J., Zhang, B., Adams, J. and Lin, G. (2007). “Unknown Foundation Testing: A Case Comparison of Different Geophysical Methods.” FMGM 2007: Seventh International Symposium on Field Measurements in Geomechanics, Boston, MA.