-
8/18/2019 Curso Analisis 2016
1/62
An´alisis Matem´ atico I. Notas de Clase
Sánchez Garrido José L.
4 de abril de 2016
1
-
8/18/2019 Curso Analisis 2016
2/62
1. Espacios Métricos
1.1. Denici´ on y Ejemplos
Denici´ on 1.1. Un espacio métrico es un par ( X, d), donde X
es un conjunto (la reservade puntos), y d una función (la
distancia, o métrica ) d : X ×X → R+ que cumple lassiguientes
propiedades:
1. d(x, y) ≥ 0, y d(x, y) = 0 ⇔ x = y (no negatividad ).2. d(x,
y) = d(y, x) (simetŕıa ).
3. d(x, y) ≤ d(x, z ) + d(z, y) ∀x,y,z ∈ X (desigualdad del tri´
angulo).Por lo regular, y siempre que no se preste a confusi´on, se
escribirá śımplemente X .
Ejemplo 1.1. Sean X arbitrario, y
d(x, y) = 0 si x = y.1 si x ̸= y.A esta métrica se le conoce
como métrica discreta .
Ejemplo 1.2. X = R, y d(x, y) = |x −y|.Ejemplo 1.3. X = Rn , x =
( x1, . . . , x n ), y = ( y1, . . . , yn ).
d(x, y) = n
k=1
(xk
−yk)2
1/ 2
Ejemplo 1.4. X = Rn , x = ( x1, . . . , x n ), y = ( y1, . . . ,
yn ).
d1(x, y) =n
k=1|xk −yk|
Ejemplo 1.5. X = Rn , x = ( x1, . . . , x n ), y = ( y1, . . . ,
yn ).
d0(x, y) = m áx1≤k≤n |xk −yk|
Ejemplo 1.6. Vamos a considerar un ejemplo m ás elaborado. Sea
( X, d), con X el
conjunto de todas las funciones continuas sobre el intervalo [
a, b], X = {f : [a, b] →R | f es continua}, y: d(f, g ) = supx∈[a,b
]
|f (x) −g(x)|A esta métrica se le conoce como la métrica del
supremo . Cuando veamos convergencia,se verá que la convergencia
puntual en este espacio coincide con la convergencia uniformede
funciones.
2
-
8/18/2019 Curso Analisis 2016
3/62
Ejemplo 1.7. (X, d) un espacio métrico arbitrario. La funci´ on
ρ(x, y) = d(x, y)1 + d(x, y)
es
una métrica.
Ejemplo 1.8. Una familia innita de distancias para un mismo
espacio. Sean X = Rn , p ≥ 1, yd p(x, y) =
n
k=1|xk −yk|
p1/p
El interés en esta familia, consiste en que d1 coincide con la
del ejemplo 1.4 , d2 es lamétrica euclideana (ejemplo 1.3 ).
Además, es un ejercicio interesante demostrar que
ĺım p→∞
n
k=1|xk −yk|
p1/p
está bien denido, y coincide con la métrica del ejemplo 1.5
.
Hasta ahora no hemos demostrado que las funciones distancia
enunciadas en los ejemploscumplan, en efecto, con la denici ón 1.1
. Vamos entonces a demostrar la desigualdad deltri ángulo para las
distancias d p de este ejemplo. Fijemos p > 1. Mostraremos
que:
n
k=1|xk −yk|
p1/p
≤ n
k=1|xk −z k|
p1/p
+ n
k=1|z k −yk|
p1/p
(1.1)
La desigualdad (1.1) es muy importante, y recibe el nombre de
desigualdad de Minkowsky .
Probaremos primero la desigualdad de H¨ older (1.2), en donde p
> 1, q > 1, y además1 p +
1q = 1:
n
k=1|xkyk| ≤
n
k=1|xk|
p1/p n
k=1|yk|
q1/q
(1.2)
Para probar (1.2), primero se observa que la desigualdad es
homogénea , es decir, si secumple para x, y ∈Rn , entonces
también se cumple para λx, µy, con λ, µ ∈R. Por tanto,y sin
pérdida de generalidad, supongamos que
n
k=1 |xk| p
=
n
k=1 |yk|q
= 1 . (1.3)
Mostraremos que en este caso,n
k=1|xkyk| ≤ 1. (1.4)
3
-
8/18/2019 Curso Analisis 2016
4/62
Para la demostraci´on de (1.4), vamos a utilizar la siguiente
desigualdad: Si a, b ≥ 0, p, q > 1 con 1 p + 1q = 1,
entoncesab
≤
a p
p +
bq
q (1.5)
Sean ahora a = |xk|, b = |yk|, y consideremos la suma sobre
k:
n
k=1|xkyk| ≤
1 p
n
k=1|xk|
p + 1q
n
k=1|yk|
q =
q n
k=1|xk|
p + pn
k=1|yk|
q
pq = 1
Con esto, queda demostrada (1.4), y por tanto, (1.2). Ahora
bien, si a, b ≥ 0, es inmediatala identidad:(a + b) p = a(a + b)
p−1 + b(a + b) p−1
Sean ak = xk −z k , bk = z k −yk . Al sumar sobre k, y aplicar
(1.2) (y dado que ( p−1)q = p):n
k=1|ak|+ |bk|
p =n
k=1|ak| |ak|+ |bk|
p−1 +n
k=1|bk| |ak|+ |bk|
p−1
≤ n
k=1|ak|
p1/p
+ n
k=1|bk|
p1/p n
k=1|ak|+ |bk|
p1/q
⇐⇒ n
k=1|ak|+ |bk|
p1/p
≤ n
k=1|ak|
p1/p
+ n
k=1|bk|
p1/p
(1.6)
Finalmente, es un ejercicio sencillo ver que (1.6) implica
(1.1). Con los ejemplos mostrados,resulta evidente que a una misma
reserva de puntos la podemos dotar con diferentesmétricas.
Denici´ on 1.2. Sea X un conjunto, y d1, d2 dos métricas.
Diremos que las métricas sonequivalentes si existen constantes
positivas c1 y c2 tales que para todos x, y ∈ X :
c1d1(x, y) ≤ d2(x, y) ≤ c2d1(x, y)Ejemplo 1.9. En Rn , las
métricas euclideana y d1 son equivalentes. En efecto, comod(x, y)
2 = ( x1 −y1)2 + . . . +( xn −yn )2, es claro que para 1 ≤ k ≤ n,
|xk −yk| ≤ d(x−y),y por tanto,
∑nk=1 |xk −yk| ≤ nd(x −y). Por otra parte,
n
k=1|xk −yk|
2=
n
k=1|xk −yk|2 + 2
k ̸= j|xk −yk| |x j −y j | ≥
n
k=1
xk −yk2∴
1n
n
k=1|xk −yk| ≤ d(x, y) ≤
n
k=1|xk −yk|
No es dif́ıcil ver que también son equivalentes las métricas
euclideana y d0.
4
-
8/18/2019 Curso Analisis 2016
5/62
Denici´ on 1.3. Sea (X, d) un espacio métrico, y Y ⊆ X .
Diremos que (Y, d|Y ×Y ), cond|Y ×Y : Y ×Y →R+ (la restricci ón de
d en Y ) es un subespacio métrico.Denici´ on 1.4. Dados x
∈ X y r > 0, denimos la bola abierta, o vecindad B(x, r )
con
centro en x y radio r como el conjunto de las y ∈ X tales que
d(x, y) < r .De la misma forma, la bola cerrada B(x, r ) con
centro en x y radio r es el conjunto de lasy ∈ X tales que d(x, y)
≤ r.Finalmente, la bola o vecindad agujerada con centro en x y
radio r B̊ (x, r ) es el conjuntode las y ∈ X tales que 0 < d(x,
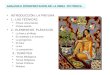
y) < r .En cálculo nos acostumbramos a ver las bolas como
intervalos, discos, o esferas. En general,la forma geométrica de
las bolas depender´a de la métrica. En la gura 1 se muestran
lasbolas centro en x y radio 1 bajo distintas métricas d p.
1
d1 (x, y )d5 / 4 (x, y )d2 (x, y )d3 (x, y )d∞ (x, y )
x
Figura 1: Forma geométrica de las bolas en R2 bajo distintas
métricas
1.2. Topoloǵıa de los espacios métricos
Denici´ on 1.5. Sean X un espacio métrico, x ∈ X , y A ⊆ X .(i)
x es un punto interior de A si existe r > 0 tal que la bola con
centro en x y radio
r está totalmente contenida en A, es decir
B(x, r ) ⊆ A(ii) Si todo x ∈ A es punto interior de A, diremos
que el conjunto A es abierto en X .
(iii ) Un punto x ∈ X es punto ĺımite de A ⊆ X si cualquier
vecindad de X contiene unpunto y ∈ A, con x ̸= y, es decir B̊ (x, r
) ∩A ̸= ∅.5
-
8/18/2019 Curso Analisis 2016
6/62
(iv ) Si x ∈ X no es punto ĺımite, diremos que x es punto
aislado.(v) A es cerrado si todo punto ĺımite de A pertenece a
A.
(vi ) A es perfecto si A es cerrado y todo x ∈ A es punto
ĺımite.(vii ) A es acotado si existe M > 0 y x ∈ A tales que A
⊆ B(x, M ).
(viii ) A es denso en X si todo punto de X es punto ĺımite de
A, o punto de A.
Teorema 1.1. Toda bola abierta es un abierto.
Demostraci ón . Sean A = B(x, r ), e y ∈ A, es decir, d(x, y) =
h < r . Ahora, para todoz tal que d(y, z ) < r −h se tiene
que:d(x, z )
≤ d(x, y) + d(z, y) = h + r
−h = r
y z ∈ A. Por tanto, todo punto y ∈ A es punto interior.Teorema
1.2. Si x ∈ X es punto ĺımite de A ⊆ X , entonces todo abierto de
x contiene una innidad de puntos de A.Demostraci ón . Dado x, y un
abierto que lo contiene, supongamos que s ólo contieneun número
nito de puntos de A. Sean x1, x2 . . . , x n , y consideremos bolas
con centros enestos puntos, y radios rk . Consideremos ahora r =
mı́n
1≤k≤n{r k}. Entonces
B̊ (x, r )
∩A =
∅Pero en este caso, x no es punto ĺımite de A.Teorema 1.3. Un
conjunto A ⊆ X es abierto si y s´ olo śı su complemento Ac = X
\Aes cerrado.Demostraci ón . ⇐) Ac cerrado, y x ∈ A. Como Ac es
cerrado, x no es punto ĺımite deAc, por lo que existe B(x, r ), r
> 0, tal que B(x, r ) ∩Ac = ∅, y por lo tanto, B(x, r ) ⊆ A,por
lo que x es punto interior de A, y A es abierto.⇒) Supongamos que A
es abierto, y sea x punto ĺımite de A
c. Para todo r > 0, B̊ (x, r ) ∩Ac̸
=
∅, y x no puede ser punto interior de A, ∴ x
∈ Ac y además es punto ĺımite de Ac,
y Ac es cerrado.
El siguiente resultado es el que nos permite hablar de
topoloǵıas en espacios métricos.
Teorema 1.4. (i) Para toda colecci´ on {Gα |α ∈ Λ} de conjuntos
abiertos,α∈Λ
Gα es
abierto.
6
-
8/18/2019 Curso Analisis 2016
7/62
(ii) Para toda colecci´ on nita {Gk|1 ≤ k ≤ n} de conjuntos
abiertos,n
k=1
Gk es abierto.
Demostraci ón . (i) Sean G =α∈Λ
Gα , y x ∈ G. Entonces x ∈ Gα para algún α ∈ Λ, ycomo Gα es
abierto, x es punto interior de Gα , por lo que existe r > 0 tal
que B(x, r ) ⊆ Gα ,y por tanto, x es punto interior de G.(ii) Sean
G =
n
k=1
Gk , y x ∈ G. Existen r1, r 2, . . . , r n > 0 tales que B(x,
r k) ⊆ Gk , parak = 1, . . . n . Sea r = mı́n {r 1, r 2, . . . r
n}. Es claro que r > 0, y que B(x, r ) ⊆ Gk para1 ≤ k ≤ n, por
lo que B (x, r ) ⊆ G, y x es punto interior de G.El teorema (1.4)
tiene el siguiente corolario inmediato.
Corolario 1.5. (i) Para toda colecci´ on {Gα |α ∈ Λ} de
conjuntos cerrados, el conjuntoα∈Λ
Gα es cerrado.
(ii) Para toda colecci´ on nita {Gk|1 ≤ k ≤ n} de conjuntos
cerrados,n
k=1
Gk es cerrado.
La demostraci ón se sigue directamente del teorema (1.3), y de
las leyes de D’Morgan:
α
Gαc
=α
Gcαα
Gαc
=α
Gcα
Por supuesto, en el teorema (1.4 (ii)) (o en su corolario), no
podemos prescindir de lapalabra nito, como se muestra en el
siguiente ejemplo t́ıpico.
Ejemplo 1.10. Para cada k ∈ N, denamos los abiertos Gk = −1k , 1
+ 1k . Entonces laintersecci ón numerable
∞
k=1
Gk = [0, 1] es cerrado en R.
Denici´ on 1.6. Sean X espacio métrico, y A ⊆ X . El conjuntoA′
=
{x
∈ X
|x es punto ĺımite de X
}recibe el nombre de conjunto derivado de X . Al conjunto Ā =
A∪A′ se le llama cerradura (o adherencia ) de A.Teorema 1.6. Sea A
⊆ X . Entonces:
(i) Ā es cerrado.
7
-
8/18/2019 Curso Analisis 2016
8/62
(ii) Ā = A si y s´ olo śı A es cerrado.
(iii ) Ā ⊆ B para cualquier B ⊆ X cerrado tal que A ⊆ B.El
teorema (1.6 (iii)) se suele expresar de la siguiente manera: La
cerradura de A es elmı́nimo de todos los conjuntos cerrados que lo
contienen.
Demostraci ón . i) Sea x ∈ X , x /∈ Ā, es decir, x /∈ A, x /∈
A′, por lo que existe r > 0 talque B (x, r ) ⊆ Āc, y x es punto
interior de Āc. Por tanto, Āc es abierto ⇔ Ā es cerrado.ii) A =
Ā ⇔ A∪A′ = Ā ⇔ A′ ⊆ A ⇔ A es cerrado.iii ) Como B es cerrado, y A
⊆ B, entonces A′ ⊆ B ′ ⊆ B , de donde se sigue que A∪A′ =Ā ⊆
B.Denici´ on 1.7. Dados A, B
∈ X espacio métrico. Se dice que A es denso en B si B
⊆ Ā.
Además, se dice que A ⊆ X es denso en ninguna parte (o que es
nunca denso ) si A no esdenso en ninguna bola B (x, r ).Denici´ on
1.8. Un espacio métrico X se llama separable si existe un conjunto
numerableA ⊆ X denso en X , esto es, X = Ā.Ejemplo 1.11. En X =
(Rn , d p), A el conjunto de todos vectores de coordenadas
racio-nales.
Ejemplo 1.12. En C [a, b] = {f : [a, b] → R}, con d x(t), y(t) =
supt∈[a,b]{|x(t) −y(t)|}, A
el conjunto de todos los polinomios con coecientes
racionales.
Por supuesto, no todos los espacios métricos son separables,
como se muestra en el si-guiente ejemplo:
Ejemplo 1.13. Sea X el conjunto de todas las sucesiones acotadas
de n´umeros reales:
X = x = ( x1, x2, . . . , x n , . . . )| |xn | < M, M >
0con la métrica d(x, y) = sup
n∈N|xn −yn |. Sea A = x ∈ X |xn ∈ {0, 1} . Es fácil ver que
A es no numerable (su cardinalidad es 2 ℵ0 ). Para cada x ∈ A,
consideremos la bola concentro en x y radio 12, B x, 1
2. Ahora bien, si x, y
∈ A, con x
̸
= y, d(x, y) = 1, lo queimplica que
B x, 12 ∩B y, 12 = ∅ siempre que x ̸= y.Supongamos ahora que
tenemos un conjunto denso B ⊆ X . Cualquiera que sea esteconjunto,
debe contener, necesariamente, al menos un punto en B x, 12 para
toda x ∈ A,por lo que dicho conjunto B no puede ser numerable.
8
-
8/18/2019 Curso Analisis 2016
9/62
La estructura de los abiertos y cerrados en espacios métricos
arbitrarios puede ser muycomplicada. Incluso en Rn podemos
encontrar muy dif́ıcil el dar una descripci´ on geométri-ca. Sin
embargo, en R con la métrica euclideana, la estructura de los
abiertos es particu-larmente simple.
Teorema 1.7. Todo abierto en R es la uni´ on de un n´ umero a lo
m´ as numerable de intervalos ajenos.
Demostraci ón . Sea G ∈R un abierto, y x ∈ G. Como x es punto
interior de G, existenecesariamente un intervalo abierto B(x, r ),
con r > 0, totalmente contenido en G, esdecir, B (x, r ) ⊆ G.
Denimos para x el siguiente conjunto:
I x = B(y, r ) ⊂ G|x ∈ B(y, r )En palabras, denimos a I x como
la unión de todos los intervalos abiertos que contienena x, y que
están totalmente contenidos en G. Sean ahora a = ı́nf I x , b =
sup I x (puedesuceder que a = −∞, b = ∞). Tenemos que demostrar que
I x es en śı un intervalo, dehecho, I x = ( a, b).La primera parte
es clara, I x ⊆ (a, b). Sea ahora y ∈ (a, b), y supongamos, sin
pérdidade generalidad, que a < y < x . En esta situaci´on,
existe y′ ∈ G tal que a < y ′ < y , ypor tanto, existe un
intervalo ( x1, x2) ⊆ G que contiene tanto a x como a y′, y
además,y ∈ (x1, x2). Pero esto último implica que y ∈ I x . Por
tanto, ( a, b) ⊆ I x .Ahora bien, dados x ̸= y ∈ G, los intervalos
correspondientes I x e I y son ajenos o coinci-den. Y G puede
escribirse como una uni ón de intervalos abiertos G =
x
∈
G
. Para demostrar
que esta uni ón es a lo más numerable, podemos poner en
correspondencia a cada I x conun subconjunto propio de los
racionales, esto es, para cada I x elegimos q x ∈ I x ∩Q, y
launión anterior es a lo más numerable.
1.2.1. Compacidad
Denici´ on 1.9. Sean Y ⊆ X espacios métricos. Un conjunto E ⊆ Y
es abierto relativoen Y si y sólo śı E = Y ∩G, para alg ún
subconjunto abierto G ⊂ X .Denici´ on 1.10. Sea A ⊆ X . Una
cubierta abierta de E es una colección {Gα |α ∈ Λ}de abiertos en X
tales que E ⊆α∈Λ G
α .
Denici´ on 1.11. Diremos que un subconjunto K ∈ X , X espacio
métrico, es compactosi toda cubierta abierta de K contiene una
subcubierta nita.
9
-
8/18/2019 Curso Analisis 2016
10/62
Es pertinente observar que los conceptos de subconjuntos
abiertos y cerrados son relativos,es decir, dependen del espacio
métrico en donde se encuentran. Por otra parte, el conceptode
compacidad es hasta cierto punto, independiente del espacio
métrico, como muestra elsiguiente resultado.
Teorema 1.8. Sean X, Y espacios métricos, y K ⊆ Y ⊆ X . K es
compacto en Y si y s´ olo śı K es compacto en X .Demostraci ón .
⇒) Sea {Gα |α ∈ Λ}una cubierta abierta de K en X . Para cada
abiertoGα ⊆ X , el conjunto V α = Y ∩ Gα es abierto relativo en Y ,
y dene una cubiertaabierta de K en Y . Ahora, como K ⊆ Y es
compacto, podemos extraer una subcubiertanita V α 1 , V α 2 , . . .
, V α n tal que K ⊆
n
k=1
V α k . Pero entonces, como ∪nk=1 V α k ⊆
n
k=1
Gα k ,
Gα 1 , Gα 2 , . . . , G α n es una subcubierta nita de K ⊆ X , y
por tanto, K es compacto enX .⇐) Consideremos ahora una cubierta
abierta de K en Y , {V α |α ∈ Λ}. Los subconjuntosV α son abiertos
relativos en Y , por lo que existen subconjuntos abiertos Gα ⊆ X
tales queV α = Y ∩Gα . Ahora, y dado que K ⊆ X es compacto, podemos
extraer una subcubiertanita Gα 1 , Gα 2 , . . . , G α n tal que K
⊆
n
k=1
Gα k . Pero entonces
K = K ∩Y ⊆n
k=1
Gα k ∩Y =n
k=1
V α k
y V α 1 , V α 2 , . . . , V α n es una subcubierta nita de K en
Y , y K es compacto en Y .
Teorema 1.9. Si un subconjunto K de un espacio métrico X es
compacto, entonces es cerrado.
Demostraci ón . Vamos a demostrar que el complemento de K en X
es abierto. Conside-remos x ∈ X \K = K c, y para cada y ∈ K , sea
ry = 12 d(x, y), y construimos las siguientesbolas: Gy = B(y, r y),
V y = B(x, r y). Por la elección de r y , es claro que Gy ∩V y =
∅. Dadoque la colección {Gy|y ∈ K } es una cubierta abierta de K ,
podemos extraer un n´umeronito de puntos y1, y2, . . . , yn tales
que K ⊆ G =
n
k=1
Gyk . Pero entonces, V =n
k=1
V yk es
abierto, y
G ∩V = n
k=1
Gyk n
k=1
V yk =n
k=1
Gykn
k=1
V yk ⊆
n
k=1
Gyk ∩V yk = ∅por lo que cada x ∈ K c es punto interior de K c, y
por tanto, K c es abierto.
10
-
8/18/2019 Curso Analisis 2016
11/62
Teorema 1.10. Sea A ⊆ K cerrado, K compacto. Entonces A es
compacto.Demostraci ón . A es cerrado. Consideremos Γ = {Gα |α ∈
Λ} una cubierta abierta deA. Si a Γ le agregamos K
\A (que es abierto en K ), obtenemos una cubierta abierta de K ,
y
dado que K es compacto, podemos extraer una subcubierta nita {Gα
1 , Gα 2 . . . , Gα n , K \A} tal que K ⊆
n
k=1
Gα k ∪K \A. Pero si de esta subcubierta nita quitamos K \A,
nosqueda una subcubierta nita para A.
El siguiente resultado es consecuencia inmediata de los dos
teoremas anteriores.
Corolario 1.11. Si A es cerrado y K compacto, entonces A ∩K es
compacto.Teorema 1.12. Sea {K α |α ∈ Λ} es una colecci´ on
arbitraria de subconjuntos compactos no vacios en un espacio
métrico X , con la propiedad de que la intersecci´ on de cualquier
subcolecci´ on nita de ellos es no vacia, entonces
α∈Λ
K α ≠ ∅Demostraci ón . Fijemos K ∈ {K α}, y consideremos
los abiertos Gα = X \K α . Supon-gamos que ningún x ∈ K está
en
α
K α (esto es, suponemos queα∈Λ
K α = ∅). En estasituaci ón, es claro que {Gα |α ∈ Λ} es una
cubierta abierta de K 1, y por tanto existenGα 1 , Gα 2 , . . . , G
α n tales que K
⊆
n
k=1
Gα k =n
k=1
X
\K α k . Pero esta última igualdad implica
que la intersecci ón nita, n
k=1
K α k ∩K = ∅, en contra del supuesto original.
Corolario 1.13. Si {K n |n ∈ N} es una colecci´ on numerable de
compactos no vacios,tales que K n +1 ⊆ K n , entonces
∞
n =1
K n ≠ ∅.
Demostraci ón . Sea K n 1 , K n 2 , . . . , K n k una
subcolección nita de compactos en la co-lección numerable. Si es
necesario, reordenamos los ı́ndices de manera que n1 < n 2 <
. . . <
nk . Por hip ótesis, K n r ⊆ K n s si nr < n s , por lo que
la colección nita tiene intersecci´onno vacia. Como se cumplen las
hip ótesis del teorema 1.12 , se sigue el corolario.Teorema 1.14.
Si A ⊆ K es innito, entonces A tiene un punto ĺımite x ∈ K .
1 X = ∅c = ∩α ∈ Λ K αc
=∪
α ∈ Λ K c
α =∪
α ∈ Λ G α
11
-
8/18/2019 Curso Analisis 2016
12/62
Demostraci ón . Supongamos que ningún x ∈ K es punto ĺımite
de A. Entonces, paratodo x ∈ K , existen bolas abiertas B (x, r x)
tales que B̊ (x, r x ) ∩A = ∅, esto es B (x, r x ) ∩A = {x} si x ∈
A, y B (x, r x ) ∩A = ∅ si x /∈ A. Pero la colección B (x, r x )
es una cubiertaabierta de K , y en esta situaci ón no podemos
extraer una cubierta nita que cubra a A,ni a K , lo cual contradice
la compacidad de K .
1.3. Continuidad
Denici´ on 1.12. Sean X e Y dos espacios métricos, y f : X → Y
. Diremos que f es continua en x0 ∈ X si para todo ε > 0 existe
δ > 0 tal que para todo x ∈ X condX (x0, x) < δ , entonces dY
(f (x0), f (x)) < ε . Además, si f es continua para todo x ∈ X
,diremos que f es continua en X .Ejemplo 1.14. Sea X = Y = Rn , X
con la métrica discreta, e Y con la métrica eucli-deana. Entonces
no importa como se dena f : X → Y , f es continua.Teorema 1.15.
Dados X, Y espacios métricos, y f : X → Y . Son equivalentes:
(i) f es continua en X
(ii) Para todo A ⊆ Y abierto, f −1(A) es abierto en X .(iii )
Para todo A ⊆ Y cerrado, f −1(A) es cerrado en X .Demostraci ón .
Por el teorema 1.3 , (ii) e (iii ) son equivalentes.
(i) ⇒ (ii)) Supongamos f continua, y sea A ⊆ Y abierto, e y ∈ f
−1(A), esto es, f (y) ∈ A.Ahora bien, A es abierto, por lo que
existe ε > 0 tal que B(f (y), ε) ⊆ A, y como f es continua,
podemos elegir δ > 0 tal que, para cualquier x con d(y, x) <
δ , entoncesd(f (y), f (x)) < ε , y por tanto, f (x) ∈ A, de
donde se sigue que x ∈ f −1(A), es decir, xes punto interior de f
−1(A).(i) ⇒ (ii)) Sean x ∈ X yε > 0, y consideremos la bola A =
B(f (x), ε) ⊆ Y , que es abiertoen Y . Por hip ótesis, f −1(A) ⊆ X
es abierto, y existe δ > 0 tal que si y cumple d(x, y) < δ
,entonces f (y) ∈ A, es decir, d(f (x), f (y)) < ε , por lo que
f es continua en x.Observaci´ on 1.1. El teorema arma que f es
continua si f −1(A) es abierto (cerrado)siempre que A sea abierto
(cerrado). No menciona a la imagen directa. En efecto, lafunción f
: R → R, f (x) = x0 es continua. Sin embargo, manda a todo
intervalo abierto(a, b) a un sólo punto (que es cerrado).Otro
contraejemplo lo constituye la funci´ on f : R2 → R, f (x, y) = x
(la proyección enla primera coordenada), que manda el conjunto
{(x, y) ∈ R2|xy = 1} (cerrado) en R \ 0(abierto).
12
-
8/18/2019 Curso Analisis 2016
13/62
Teorema 1.16. Sean X,Y,Z espacios métricos. Si f : X → Y es
continua en x, y g : Y → Y es continua en f (x), entonces g ◦ f es
continua en x.Si f es continua en X , y g es continua en Y ,
entonces g ◦ f es continua en X .Demostraci ón . Supongamos que f
e continua en x, y g es continua en y = f (x),y sea ε > 0. Por
la continuidad de g en y, existe δ ′ > 0 tal que si dY (y, y1)
< δ ′,entonces dZ (g(y), g(y1)) < ε . Para la δ ′ anterior,
existe δ > 0 tal que si dX (x, x 1) < δ ,entonces dY (f (x),
f (x1)) < δ ′. Pero lo anterior siginica que si dX (x, x 1) <
δ , entoncesdz(g ◦f (x), g ◦f (x1) < ε , y por tanto, g ◦f es
continua en x. Finalmente, y dado quex ∈ X fue arbitraria, de aqúı
se sigue la segunda parte del teorema.Denici´ on 1.13. f : X → Y es
uniformemente continua si para todo ε > 0. existe δ > 0tal
que para todos los x, y ∈ X que cumplan dX (x, y) < δ , entonces
dY (f (x), f (y)) < ε .Denici´ on 1.14.
Una función entre espacios métricos f : X → Y biyectiva,
continua ycon inversa continua es un homeomorsmo, y se denota X ≈ Y
.Si la función f : X → Y es biyectiva, uniformemente continua y
con inversa uniforme-mente continua, diremos que X e Y son
uniformemente homeomorfos , y lo denotaremosX
u
≈ Y .A priori , existe la inversa. Sin embargo, no
necesariamente es continua, como se muestraenseguida.
Ejemplo 1.15. Sean X = Y = Rn , con dX la métrica discreta, y
dY la métrica euclideana.La función I d : X
→ Y es biyectiva, continua, pero la inversa no es continua.
Ejemplo 1.16. Sea f : [0, 1) → S1, donde S1 = {x ∈ R2|x21 + x22
= 1}, y f la funciónf (t) = (cos 2 πt, sin2πt ). Es claramente
continua, biyectiva, y la inversa no es continua en(1, 0). En
efecto, las imágenes de vecindades del (1, 0) son intervalos
ajenos.
Ejemplo 1.17. Ahora veamos un homeomorsmo uniforme. Sean X = Y =
Rn , condX = d1, dY = d2, y la identidad (como conjunto de puntos)
de Rn . En el ejemplo 1.9demostramos la siguiente desigualdad,
válida para todos x, y ∈ X :
1n
d1(x, y) ≤ d2(x, y) ≤ d1(x, y) ≤ nd2(x, y)
Con estas desigualdades, podemos demostrar que X u≈ Y . En
efecto, dado ε > 0, entonces,para todos x, y ∈ X , d2(f (x), f
(y)) = d2(x, y) < ε implica que 1n d1(x, y) ≤ d2(x, y).
Siescribimos δ = nε, esto muestra que id : X → Y es uniformemente
continua.Si ahora consideramos f −1 = f , dado ε > 0, para todos
x, y ∈ Y , d1(f (x), f (y)) =d1(x, y) < ε implica que d2(x, y) ≤
d1(x, y). Por tanto, δ = ε muestra que la inversa esuniformemente
continua.
13
-
8/18/2019 Curso Analisis 2016
14/62
Ejemplo 1.18. Consideremos para este ejemplo a X = Y = Rn , con
dX la métricaeuclideana, y dY la métrica denida por dY (x, y)
=
dX (x, y)1 + dX (x, y)
. La función entre los
espacios es de nuevo la identidad. Consideremos adem´as que,
para x
≥ 0, la función
x → x1 + x es estrictamente creciente, por lo que al aplicarla a
una desigualdad, la respeta,es decir, si x < y , entonces
x1 + x
< y1 + y
. Además, la inversa es x → x1 −x
, que tambíen
es creciente.
x
y
1
x
1+ x
1
x
1− x
Figura 2: x → x1 + x
, x → x1 −x
Sean ahora ε > 0 y x ∈ Y . Entonces, para todo y ∈ Y tal que
dY (f (x), f (y)) < ε , setiene:dY (f (x), f (y)) = dY (x, y) =
dX (x, y)1 + dX (x, y)
< ε =⇒dX (x,y )
1+ dX (x,y )
1 − dX (x,y )1+ dX (x,y )= dX (x, y) <
ε1 −ε
por lo que, si consideramos δ = mı́n {1, ε1−ε}, se tiene que f
es continua.Para la inversa, sean x ∈ X y ε > 0. Para todo y ∈ X
tal que dX (f −1(x), f −1(y)) < ε ,entonces
dX (f −1(x), f −1(y)) = dX (x, y) < ε =⇒
dY (x, y) = dX (x, y)
1 + dX (x, y) <
ε
1 + ε < ε
Y si hacemos δ = ε1+ ε , lo anterior muestra que f −1 es
continua. Por tanto, X ≈ Y .Con base en estos ejemplos, podemos
volver a enunciar (y renar) de nuevo la denici´on1.2 .
14
-
8/18/2019 Curso Analisis 2016
15/62
Denici´ on 1.15. Sean d1, d2 dos métricas en un espacio
métrico X . Diremos que d1 esequivalente a d2 si id : (X, d 1), →
(X, d 2) es un homeomorsmo.Además, d1 es uniformemente equivalente
a d2 si id : (X, d 1), → (X, d 2) es un homeomor-smo
uniforme.Denici´ on 1.16. Sean X , Y dos espacio métricos. Una
funci ón f : X → Y es unaisometŕıa si para todos x, y ∈ X , dX
(x, y) = dY (f (x), f (y)). En esta situaci´on, diremosque X e Y
son isométricos .Si dos espacios métricos son isométricos,
signica que todas las relaciones métricas coin-ciden, y sólo la
naturaleza de sus elementos es diferente. Desde el punto de vista
de lateoŕıa, los espacios son indistinguibles.
Ejemplo 1.19. X = R2 con la métrica euclideana, es isométrico
a C, con la métricainducida por la norma:
∥z
∥
= √ z ̄z , es decir, dC(z, w) =√
(z
−w)(z
−w). La isometrı́a
es (x, y) → x + iy.El concepto de compacidad, cuando se une al
de continuidad, nos proporciona resultadosútiles.
Teorema 1.17. Si f : X → Y es continua, X, Y espacios métricos,
y X compacto,entonces f (X ) es compacto.Demostraci ón . Sea {Gα
|α ∈ Λ} una cubierta abierta de f (X ). Como f es conti-nua, se
sigue del teorema 1.15 que f −1(Gα ) es abierto en X , y {f −1(Gα
)} es una cu-bierta abierta de X . Por la compacidad de X , podemos
extraer una subcubierta nitaf −1(Gα 1 ), . . . , f −1(Gα 1 ) tal
que X =
n
k=1
f −1(Gα k ). Por tanto,
f (X ) = f n
k=1
f −1(Gα k ) =n
k=1
f f −1(Gα k ) =n
k=1
Gα k
y Gα 1 , . . . , G α 1 es una subcubierta nita de f (X ), y por
tanto, f (X ) es compacto.
Teorema 1.18. Si f : X → Y , X, Y espacios métricos compactos,
y f continua y biyec-tiva, entonces X ≈ Y .
Demostraci ón . Como hemos comentado antes, el que f sea
biyectiva nos asegura laexistencia de la inversa. Tenemos que
mostrar que la inversa, f −1, es continua en Y . SeanA ⊆ X cerrado,
y f (A) su imagen en A. Por ser A cerrado en un compacto, es
compacto(teorema 1.10 ), y por el teorema 1.17 , f (A) es compacto,
y por tanto cerrado en Y (denuevo por el teorema 1.10 ). Esto es,
la imagen inversa (y aqúı estamos usando a f comola inversa de f
−1) de un cerrado A ⊆ X es cerrado en Y . Se sigue del teorema 1.15
quef −1 es continua, y por tanto, f es un homeomorsmo entre X e Y
.
15
-
8/18/2019 Curso Analisis 2016
16/62
1.4. Convergencia
Denici´ on 1.17. Una sucesi´ on en un espacio métrico es una
una funci´on a : N → X .Por lo regular, denotaremos a las
sucesiones por sus im´agenes, y en lugar de utilizar lanotaci ón
funcional, usaremos sub́ındices, {an}.Denici´ on 1.18. Diremos que
una sucesi ón {an} ⊆ X converge si existe x ∈ X tal quepara todo ε
> 0, existe N > 0 tal que si n ≥ N , entonces dX (x, a n )
< ε .Si {an} no converge, diremos entonces que diverge .Notaci´
on. Para denotar que la sucesi´on {an} converge, utilizaremos de
manera indistintalas siguientes notaciones:
an → xan → x cuando n → ∞ĺımn→∞an = x
De manera an áloga, será indistinto decir {an} converge hacia
x, o que x es el ĺımite de{an}.Teorema 1.19. Sea {an} ⊆ X .
(i) {an}converge hacia x ∈ X si y s´ olo śı toda vecindad de x
contiene todos los términos de {an} salvo un n´ umero nito de
ellos.
(ii) Si an → x y an → y, entonces x = y.(iii ) Si an converge,
entonces {an} es acotado.(iv ) Si A ⊆ X y x es punto ĺımite de de
A, existe una sucesi´ on {an} ⊆ A para la cual an → x.
Demostraci ón . (i) ⇒) Sea A un abierto que contiene a x. Por
ser x punto interior,existe una bola con centro en x de radio ε
> 0 tal que B(x, ε) ⊆ A. Pero por hip ótesis,{an} converge a x,
por lo que existe N > 0 tal que si n ≥ N , d(x, a n ) < ε ,
por lo que,necesariamente, an ∈ B(x, ε) ⊆ A siempre que n ≥ N .(i)
⇐) Sean ε > 0, A = B(x, ε). Denamos ahora N = m áx{n ∈N|an /∈
A}. Tal N existey es nito, dado que por hip ótesis sólo un
número nitos de términos de la sucesi´on noestán en A. Por
tanto, si n ≥ N , d(x, x n ) < ε , y por tanto, ĺımn→∞an =
x(ii) Sea ε > 0. Como {an} → x, existe N 1 > 0 tal que si n ≥
N 1, d(x, a n ) < ε . Además,{an} → y, por lo que existe N 2
> ) tal que si n ≥ N 2. Sea ahora N = m áx{N 1, N 2}, y sin ≥ N
, d(x, y) ≤ d(x, a n ) + d(y, a m ) < 2ε. Pero esto último
implica que x = y.
16
-
8/18/2019 Curso Analisis 2016
17/62
(iii ) Sea ε > 0, y dado que {an} converge a x, existe N >
0 tal que si n ≥ N , entoncesd(x, a n ) < ε . Consideremos M = m
áx1≤k≤N {d(x, a n )}. Se sigue de lo anterior que {an} ⊆
B(x, r ), donde r = m áx{M, ε}.(iv ) Para cada n ∈ N,
consideremos B̊ x, 1n . Se sigue del teorema 1.2 que hay unainnidad
de puntos de A en B̊ x, 1n ∩A ̸= ∅. Por tanto, para cada n, podemos
elegir andistinto de ak , para 1 ≤ k < n . Sea ahora ε > 0, y
N > 0 tal que N > 1ε . Si n ≥ N ,an ∈ B̊ x, 1n ∩ A por la
construcci ón anterior, es decir, d(x, a n ) ≤ 1n ≤ 1N < ε , y
portanto, an → x.Teorema 1.20. Sean X, Y espacios métricos. f : X
→ Y es continua si y s´ olo śı siempre que an → x, entonces f (an
) → f (x).Demostraci ón . ⇒) Sea ε > 0. Como f es continua,
existe δ > 0 tal que siempreque d(x, y) < δ , entonces d(f
(x), f (y)) < ε . Además, an → x, por lo que dada δ >
0,existe N > 0 tal que si n ≥ N , d(x, a n ) < δ , y por la
primera parte, se sigue qued(f (x), f (an )) < ε .⇐) La
demostraci ón es indirecta. Supongamos que an → x, y que f no es
continua, esdecir, existe ε > 0 tal que para todo δ > 0, si
d(x, y) < δ , entonces d(f (x, f (y)) ≥ ε. Peroesto quiere decir
que aunque d(x, a n ) < δ , d(f (x), f (an )) ≥ ε, por lo que
suponer que f no es continua, muestra que {f (an )} no converge a f
(x).Con la teoŕıa de conjuntos compacto que hemos visto, podemos
probar el siguiente resul-tado:
Teorema 1.21. Si K ⊆ X es compacto, entonces toda sucesi´ on
{an} ⊆ K tiene una subsucesi´ on {an k } que converge a x ∈ K
.Demostraci ón . {an} ⊆ K es innito, y por el teorema 1.14 , tiene
un punto de acu-mulación x ∈ K . Y por el teorema 1.19 , existe
una sucesi ón {an k } ⊆ {an} tal quean k → x.De hecho, el teorema
1.21 puede enunciarse como una equivalencia. Por el momento,no
contamos con las herramientas para demostrar esta equivalencia,
pero más adelanteregresaremos a ésta.
17
-
8/18/2019 Curso Analisis 2016
18/62
2. Convergencia Uniforme
2.1. Criterio de Cauchy
Denici´ on 2.1. Una sucesión {an} ⊆ X es fundamental (o de
Cauchy ) si y sólo śı paratodo ε > 0 existe N > 0 tal que
si n, m ≥ N , entonces d(an , am ) < ε .A continuaci ón se
muestran algunas propiedades importantes de las sucesiones
fundamen-tales.
Proposici´ on 2.1. (i) Una sucesion {an} ⊆ X convergente a x es
fundamental.(ii) Una sucesion fundamental {an} ⊆ X es acotada.
(iii ) Si f : X
→ Y es uniformemente continua, y
{an
} ⊆ X es fundamental, entonces
{f (an )} ⊆ Y es fundamental.(iv ) Si {an} ⊆ X es fundamental, y
existe una subsucesi´ on {an k } ⊆ {an} tal que an k →x, entonces
an → x.
Demostraci ón . (i) Por ser la sucesi ón convergente a x, dado
ε > 0, existe N > 0 talque si n ≥ N , entonces d(x, a n )
< ε . Sean por tanto n, m ≥ N :
d(an , am ) ≤ d(an , x) + d(am , x) < 2ε(ii) Es un ejercicio
sencillo (vea el Teorema 1.19 , iii).
(iii ) Supongamos que f es u. c., y sea ε > 0. Existe δ >
0 tal que para todas x, y ∈ X quecumplan con dX (x, y) < δ ,
entonces dY (f (x), f (y)) < ε . Y dado que {an} es
fundamental,por lo que para la δ > 0 dada, existe N > 0 tal
que si n, m ≥ N , entonces dX (an , am ) < δ .Pero esto último
implica que dY (f (an ), f (am )) < ε .(iv ) También es un
ejercicio sencillo.
Por supuesto, el converso de 2.1 i no es cierto.
Ejemplo 2.1. Sea Q ⊆ R, con la métrica inducida como subespacio
de R. La sucesióndenida por:a1 = 2an = an−1 +
1n!
es una sucesión fundamental en Q. En efecto, el n –ésimo
término de la sucesi´on es:
an = 2 + 12!
+ 13!
+ 14!
+ . . . + 1n!
18
-
8/18/2019 Curso Analisis 2016
19/62
que es racional. Pero la sucesi ón aśı construida no converge
en Q. Mostremos que esfundamental. Sea ε > 0, y N sucientemente
grande tal que
1N !
< ε . Entonces, si n, m ≥N , podemos suponer sin pérdida de
generalidad que n > m , y si tenemos en cuenta que
en esta situaci ón:
n! = n(n −1)(n −2) · · ·(m + 2) m! > m n−m m! =⇒|an −am |
=
1(m + 1)!
+ 1
(m + 2)! +
1(m + 3)!
+ . . . + 1n!
= 1
(m + 1)! +
1(m + 2)( m + 1)!
+ . . . + 1
n(n −1) · · ·(m + 1)!≤
1(m + 1)!
+ 1
m(m + 1)! +
1m2(m + 1)!
+ . . . + 1
mn−m (m + 1)!
= 1
(m + 1)! 1 + 1m +
1m2 + . . . +
1mn−m =
1(m + 1)!
1
− 1
m m − n +1
1 − 1m≤
1(m + 1)!
11 − 1m
= 1
(m + 1)!m
m −1 ≤ 1
(m −1)m!≤
1(m −1)N ! ≤
ε(m −1)
< ε
2.2. Espacios métricos Completos
Denici´ on 2.2. Un espacio métrico X es completo si y sólo śı
cualquier sucesi ón funda-mental
{an
} ⊆ X converge a x
∈ X .
Ejemplo 2.2. Muchos de los espacios métricos que vimos en la
sección correspondienteson completos. Por ejemplo, X = C [a, b]
(el espacio de todas las funciones continuas delintervalo [a, b] a
R), con la métrica del supremo d(f, g ) = sup
t∈[a,b]|f (t) −g(t)| es completo.
Para checar esta armaci´ on, sea ε > 0, y una sucesión
fundamental {f n} ⊆ C [a, b]. Paracada t ∈ [a, b], |f n (t) −f m
(t)| ≤ d(f n , f m ) < ε , lo que implica que la sucesión {f n
(t)}es una sucesión fundamental en R. Si denimos f (t) = ĺım n→∞f
n (t), el razonamientoanterior nos muestra que f n (t)
u
→ f (t). Y es un resultado conocido de c álculo que el
ĺımiteuniforme de una sucesi ón de funciones continua es
continua.Proposici´ on 2.2. Sea X un espacio métrico compacto.
Entonces X es completo.
Demostraci ón . Sea {am} ⊆ X fundamental en un métrico
compacto. Por el teorema1.21 , existe una subsucesi ón {an k } ⊆
{an} que converge a x ∈ X , y por el teorema 2.1 ,se sigue qeu {an}
converge a x. Por tanto, X es completo.Proposici´ on 2.3. (i) Sean
Y ⊆ X , Y completo. Entonces Y es cerrado.
19
-
8/18/2019 Curso Analisis 2016
20/62
(ii) Sean Y ⊆ X , Y cerrado y X completo. Entonces Y es
completo.Demostraci ón . (i) Supongamos que Y es completo, y sea x
∈ Y ′. Por el teorema 1.19iv , podemos construir uns sucesi ón
{an
} ⊆ Y tal que an
→ x. Como la sucesión converge,
es fundamental, y dado que Y es completo, {an} → y ∈ Y . De
nuevo, por 1.19 ii, x = y,por lo que x ∈ Y , e Y es cerrado.(ii)
Supongamos que Y ⊆ X , X completo. Sea {an} ⊆ Y ⊆ X fundamental.
Como X escompleto, an → x, por lo que x ∈ Y ′. Por otra parte, Y es
cerrado, por lo que x ∈ Y ′ ⊆ Y ,y se sigue que Y es completo.De
los resultados en la sección de topoloǵıa, vimos que si f : X → Y
es un homeomorsmo,entonces X es compacto si y sólo śı Y es
compacto. Sin embargo, con los espacios completoses necesario pedir
una condici ón más fuerte.
Teorema 2.4. Sean X e Y uniformemente homeomorfos. Entonces X es
completo si y s´ olo śı Y es completo.
Demostraci ón . Supongamos X completo, y sea {yn} ⊆ Y
fundamental. Dado que lainversa de f , f −1 es uniformemente
continua, {f −1(yn )} ⊆ X es fundamental ( 2.1 , iii).Ahora X es
completo, por lo que f −1(yn ) → x ∈ X . Finalmente, como f es
continua, sesigue de f f −1(yn ) = yn → f (x) ∈ Y , por lo que Y es
completo.Teorema 2.5. Sean A ⊆ X denso, Y completo y f : A → Y
uniformemente continua.Entonces existe una ´ unica funci´ on
uniformemente continua F : X → Y tal que F (x) =f (x) para todo
x
∈ A.
Antes de probar el teorema, demostramos el siguiente lema, mismo
que nos permitir´ ademostrar la unicidad de tal funci´on.
Lema 2.6. Sean A ⊆ X denso, f , g : X → Y continuas. Si f (x) =
g(x) para toda x ∈ A,entonces f = g.Demostraci ón . Si A ⊆ X es
denso, para cualquier x ∈ X podemos construir unasucesión {an} ⊆ A
tal que an → x. Además, an → x implica, por el teorema 1.21 , quef
(an ) → f (x) y g(an ) → g(x). Dado ε > 0,
dY (f (x), g(x)) < d Y (f (x), f (an )) + dY (f (an ), g(an
)) + dY (g(an ), g(x))
Y observamos que dY (f (x), f (an )) y dY (g(x), g(an )) los
podemos hacer tan pequeos comoqueramos, por la convergencia de f
(an ) y g(an ), mientras que dY (f (an ), g(an )) = 0
porhipótesis. Por tanto, f (x) = g(x) para todo x ∈ X .
20
-
8/18/2019 Curso Analisis 2016
21/62
Demostracio ń (Teorema 2.5 ) . Existencia Sean {an} ⊆ A
convergente a x ∈ X , yε > 0. Por ser f uniformemente continua
en A, existe δ > 0 tal que siempre que x, y ∈ Acon dX (x, y)
< δ , entonces dY (f (x), f (y)) < ε . Ahora, para δ > 0
existe N > 0 tal que sin, m
≥ N , entonces dX (an , am ) < δ , y por lo anterior, dY (f
(an ), f (am )) < ε , por lo que
{f (an )} ⊆ Y es fundamental, y adem´as, Y es completo, por lo
que f (an ) → y.Denimos F (x) = y = ĺım
n→∞an .
Para demostrar que la funci´on F está bien denida, consideremos
otra sucesi´on {bn} ⊆ Aconvergente a x. La sucesión c2n = bn ,
c2n−1 = an converge a x, por lo que {f (cn )} ={f (a1), f (b1), f
(a2), f (b2), . . .} es una sucesión fundamental en Y . Pero la
subsucesi ón{f (c2n−1)} = {f (an )} converge a y. Por tanto, tanto
la sucesi´ on {cn} como la subsucesión{bn} convergen a y, y F no
depende de la sucesión convergente que elijamos.Si x ∈ A, la
sucesión constante an = x para todo n converge a x, por lo que F
(x) = f (x)para todo x
∈ A.
Para probar la continuidad uniforme, sean x, x′ ∈ X , y {xn},
{y′n} ⊆ A tales que xn → x,x′n → y′. Por lo anterior,F (x) = y =
ĺım
n→∞f (xn )
F (x′) = y′ = ĺımn→∞
f (x′n ) =⇒dY (y, y′) ≤ dY (y, f (xn )) + dY (f (xn ), f (x′n ))
+ dY (f (x′n ), y′)
Y cada término lo podemos hacer menor a ε3
. El primero y el tercero, por la forma en quedenimos F ,
mientras que el segundo término, debido a que f es uniformemente
continua
en A.Unicidad Aplicación directa del lema 2.6 .
Teorema 2.7 (Lema de Urisohn) . Sean S, T ⊂ X subespacios
cerrados, ajenos no vacios.Entonces existe una funci´ on f : X →R
continua tal qeu f (S ) = 0 , f (T ) = 1 .Para demostrar este
teorema, vamos a probar un lema que contiene algunas
propiedadesinteresantes de la funci´on ρ(x, A) = ı́nf
y∈A{d(x, y)}.Lema 2.8. (i) S ⊆ X es cerrado si y sólo si ρ(x, S
) > 0 para todo x ∈ X \S .
(ii) Si T
⊆ X es cerrado no vacio, entonces para todo x, y
∈ X ,
|ρ(x, T )
−ρ(y, T )
| ≤d(x, y)(iii ) Si S ⊆ X es cerrado no vacio, entonces f : X →
R, f (x) = ρ(x, S ) es uniforme-mente continua.(iv ) Si S, T ⊆ X
son cerrados, ajenos no vacios, entonces ρ(x, S ) + ρ(x, T ) > 0
para todo x ∈ X .
21
-
8/18/2019 Curso Analisis 2016
22/62
Demostraci´ on. (i) ⇒) Si S ⊆ X es cerrado, entonces su
complemeto X \S es abierto, ycualquier punto x ∈ X \S es punto
interior, por lo que existe r > 0 tal que B(x, r ) ⊆ X \S .Por
tanto, ρ(x, S ) ≥ r > 0.
⇐) Si ρ(x, S ) = r > 0, B(x,r/ 2) ⊆ X \S , por lo que x es
punto interior de X \S . Portanto, X \S es abierto, y S es
cerrado.(ii) Sean x, z ∈ X \S .
ρ(x, S ) = ı́nf y∈S {d(x, y)} ≤́ınf y∈S {d(x, z ) + d(z, y)} =
d(x, z ) + ı́nf y∈S {d(z, y)}
= d(x, z ) + ρ(z, S ) ⇒ ρ(x, S ) −ρ(z, S ) ≤ d(x, z )De manera
an áloga, ρ(z, S ) −ρ(x, S ) ≤ d(x, z ).(iii ) Sea ε > 0, y x,
y ∈ X tales d(x, y) < ε . Por ( ii),
d(f (x), f (y)) = |ρ(x, S ) −ρ(y, S )| ≤ d(x, y) < εy f es
uniformemente continua.
(iv ) Si x ∈ S , x ∈ X \T , que es abierto, y por ( i), ρ(x, T )
> 0. De la misma forma, six ∈ T , entonces ρ(x, S ) > 0.
Finalmente, si x /∈ S ∪T , x ∈ S c ∩T c, que es abierto. Portanto,
d(x, S ) > 0 y d(x, T ) > 0.Demostraci ón, Lema de Urisohn .
Sea f : X →R:
f (x) = ρ(x, S )
ρ(x, S ) + ρ(x, T )
Por el lema anterior, tenemos un cociente de funciones
uniformemente continuas, y adem´ asel denominador nunca se anula,
por lo que f ası́ denida es continua. Adem´as, es inmediatovericar
que si x ∈ S , entonces f (x) = 0, y si x ∈ T , entonces f (x) =
1.Denici´ on 2.3. Sea X un espacio métrico. Un espacio métrico
completo X ∗ es unacompletaci´ on de X si:
1. X ⊆ X ∗2. X es denso en X ∗.
El siguiente teorema es muy importante en la teoŕıa. La
demostraci´ on, aunque extensa,es directa.
Teorema 2.9. Todo espacio métrico X posee una completaci´ on, y
ésta es ´ unica dalvoisometrı́as que mandan a X en si mismo.
22
-
8/18/2019 Curso Analisis 2016
23/62
Demostraci ón (Existencia) . Sean {an}, {bn} ⊆ X sucesiones
fundamentales. Dire-mos que {an}y {bn} son equivalentes si y sólo
si ĺımn→∞d(an , bn ) = 0. La relaci ón esde equivalencia, como se
puede probar f ácilmente. Por tanto, esta relaci´ on induce
unapartici ón en el conjunto de todas las sucesiones fundamentales
en X :
R = {{an} es sucesión fundamental }Consideremos X ∗ = R/ ∼,
esto es, X ∗ consiste de las clases de sucesiones
fundamentalesequivalentes. Ahora, denimos ρ : X ∗×X ∗ →R+
mediante:
ρ(x∗, y∗) = ĺımn→∞
d(xn , yn )
en donde {xn} ∈ x∗, {yn} ∈ y∗ son representantes de las clases
de equivalencia x∗, y∗ ∈ X ∗.Tenemos que mostrar que ρ está bien
denida, es decir, que existe el ĺımite anterior, yademás, no
depende de los representantes que elijamos. Sean {xn} ∈ x∗, {yn} ∈
y∗.Entonces
|d(xn , yn ) −d(xm , ym )| = |d(xn , yn ) −d(xn , ym ) + d(xn ,
ym ) −d(xm , ym )|≤ |d(xn , yn ) −d(xn , ym )|+ |d(xn , ym ) −d(xm
, ym )|≤ d(yn , ym ) + d(xn , xm ) < 2ε
pues las sucesiones {xn} e {yn} son fundamentales. Estas
desigualdades implican que lasucesión {d(xn , yn )} ⊆R es
fundamental, y R es completo, por lo que tiene sentido hablardel
ĺımite. Si consideramos ahora {xn}, {x′n} ∈ x∗, {yn}, {y′n} ∈
y∗:|d(xn , yn ) −d(x′n , y′n )| = |d(xn , yn ) −d(x′n , yn ) +
d(x′n , yn ) −d(x′n , y′n )|
≤ |d(xn , yn ) −d(x′n , yn )|+ |d(x′n , yn ) −d(x′n , y′n )|≤
d(xn , x′n ) + d(yn , y′n ) < 2εy esto quiere decir que la
diferencia entre d(xn , yn ) y d(xm , ym ) la podemos hacer
tanpequeña como queramos, siempre que {xn}, {x′n} ∈ x∗, {yn},
{y′n} ∈ y∗.La vericación de los axiomas de distancia es inmediata,
y s´olo es ligeramente dif́ıcil ladesigualdad del tri ángulo. Si
{xn} ∈ x∗, {yn} ∈ y∗ y {z n} ∈ z ∗, para todo n se tiene que:
d(xn , yn ) ≤ d(xn , z n ) + d(z n , yn ) ⇒ĺım
n→∞d(xn , yn ) ≤ ĺımn→∞d(xn , z n ) + ĺımn→∞d(z n , yn )
⇒ρ(x∗, y∗) ≤ ρ(x∗, z ∗) + ρ(z ∗, y∗)Por tanto, X ∗ es un espacio
métrico.
Veamos ahora que X ⊆ X ∗. A cada x ∈ X le ponemos en
correspondencia la clase desucesiones equivalentes que convergen a
él, es decir, {xn} tales que xn → x. Entonces,para x, y ∈ X ,
ρ(x∗, y∗) = ĺımn→∞
d(xn , yn )
23
-
8/18/2019 Curso Analisis 2016
24/62
Y por otra parte,
|d(x, y) −d(xn , yn )| = |d(x, y) −d(y, x n ) + d(y, x n ) −d(xn
, yn )|≤ |
d(x, y)
−d(y, x n )
|+
|d(y, x n )
−d(xn , yn )
|≤ d(x, x n ) + d(y, yn ) < 2εlo qcual implica que X → X ∗, x
→ x∗ es una isometrı́a, e identicando a X con su imagenen X ∗, se
tiene que X ⊆ X ∗.Para ver que X ⊆ X ∗ es denso, sean x∗ ∈ X ∗, ε
> 0, y {xn} ∈ x∗. Dado ε > 0, existeN > 0 tal que si n, m
≥ N , entonces d(xn , xm ) < ε . Pero en este caso:
ρ(xn , x∗) = ĺımm→∞
d(xn , xm ) ≤ εy esto signica que cualquier vecindad de x∗
contiene innitos puntos xm ∈ X . Aśı, x∗ espunto ĺımite de X
.Falta únicamente demostrar que X ∗ es completo. Sea {x∗n} ⊆ X ∗
una sucesión funda-mental (obsérvese que cada x∗n es una clase de
equivalencia de sucesiones fundamentales).Dado que X ⊆ X ∗ es
denso, para cada x∗n ∈ {x∗n}, podemos escoger x′n ∈ X tal queρ(x′n
, x∗n ) <
1n
. Por tanto:
ρ(x′n , x′m ) ≤ ρ(x′n , x∗n ) + ρ(x∗n , x∗m ) + ρ(x∗m , x′m
)<
1n
+ ε + 1m
< 3ε
y la sucesión {x′n} ⊆ X es fundamental, por lo que existe x∗ ∈
X ∗ tal que x′n → x∗.Faltaŕıa mostrar que x∗n → x∗. Peroρ(x∗n ,
x∗) ≤ ρ(x∗n , x′n ) + ρ(x′n , x∗) < 2ε
con lo que queda demostrada la existencia de la completaci´
on.
Unicidad . Sean X ∗, X ∗∗ dos completaciones de X . Por
demostrar que existe ϕ : X ∗ →X ∗∗ isometrı́a tal que ϕ(x) = x para
todo x ∈ X . Sea x∗ ∈ X . Existe {xn} ∈ X talque xn → x∗. Además,
{xn} es fundamental en x∗. Y cada xn ∈ X ∗∗. Además, es claroque
{xn} es fundamental en X ∗∗, y dado que X ∗∗ es completo, existe
x∗∗ ∈ X ∗∗ tal quexn → x∗∗. Por otra parte, x∗∗ es independiente de
la sucesi ón {xn}2Denamos ϕ(x∗) = x∗∗. Es claro que ϕ(x) = x si x
∈ X . Ahora, dadas sucesionesfundamentales {xn}, {yn} tales que xn
→ x∗, yn → y∗, y xn → x∗∗, yn → y∗∗, se tiene,por una parte
ρX ∗(x∗, y∗) = ĺımn→∞d(xn , yn )
2 Si {x ′n } es otra sucesi ón tal que x n → x∗∗ , entonces d(x
n , x ′n ) ≤ ρ2 (x n , x ∗∗) + ρ2 (x ′n , x ∗∗) < 2ε paran
sucientemente grande.
24
-
8/18/2019 Curso Analisis 2016
25/62
y por otra:ρX ∗∗(x∗∗, y∗∗) = ĺımn→∞
d(xn , yn )
Por tanto, ρX ∗(x∗, y∗) = ρX ∗∗(x∗∗, y∗∗), y ϕ es una
isometrı́a.
Teorema 2.10. Un espacio métrico X es completo si y s´ olo śı
cualquier sucesi´ on de bolas cerradas, anidadas y cuyos radios
tiendan a cero, tiene intersecci´ on no vacia.
Demostraci ón . ⇒) Sean B1, B 2, . . . bolas cerradas tales que
Bk+1 ⊆ Bk (esto es, Bk =B(xk , r k)), y cuyos radios tienden a
cero. La sucesi ón formada por los centros de las bolases
fundamental, daso que si n > m , Bn ⊆ Bm , y como ĺımn→∞
1n
= 0, d(xn , xm ) < r n . ComoX es completo, existe x ∈ X tal
que xn → x. Esto nos dice que x es punto ĺımite de cadaBn , y Bn
es cerrado, por lo que x ∈ Bn para toda n, de donde x ∈
∞
n =1
Bn , y la intersección
es no vacia.
⇐) Sea {xn} una sucesión fundamental. Dado ε1 = 12
, existe N 1 > 0 tal que si n ≥ N 1,d(xn , n1) < ε 1. Y
hacemos B1 = B(xn 1 , 1). Ahora, para ε2 =
122
, existe n2 > 0, tal que si
n ≥ n2, d(xn , xn 2 ) < ε 2, y tomamos B2 = B(xn 2 , 12
). Una vez elegidos xn 1 , xn 2 , . . . , x n k , y
dado εk+1 = 12k+1
, podemos elegir xn k +1 de manera que si n ≥ nk+1 , d(xn , xn k
+1 ) < ε k+1 ,y considerar Bk+1 = B(xn k +1 ,
12k
). De esta manera, construimos una sucesi´ on de bolas
cerradas, anidadas, y cuyos radio 12k → 0 si k → ∞. Sea x
∈∞k=1
Bk . Por la construcci ón,
x es punto ĺımite de la subsucesi´on xn k , que es subsucesión
de una sucesión de Cauchy, ypor tanto, xn → x, y se sigue que X es
completo.Para nalizar la sección, enunciamos y probamos el teorema
de la Categoŕıa de Baire.
Teorema 2.11 (Baire) . Un espacio métrico completo X no es la
unión numerable de conjuntos nunca densos.
Demostraci ón . Supongamos que X =
∞
n =1 An , donde cada an es nunca denso. Sea B0una bola cerrada
de radio 1. Como A1 es nunca denso en B0, existe una bola cerrada
B1cerrada, de radio menor a
12
, tal que B1 ⊆ B0, y Ai ∩B1 = ∅. Ahora bien, A2 es nuncadenso en
B1, por lo que existe una bola cerrada B2 de radio menor a 13 2 tal
que B2 ⊆ B1,y A2 ∩B2 = ∅. Procediendo de esta manera, construimos
una sucesi´ on de bolas cerradas
25
-
8/18/2019 Curso Analisis 2016
26/62
{Bn}, anidadas, y tales que sus radios rn = 1n + 1 → 0 cuando n
→ ∞, y tales que
An ∩Bn = ∅. Por el teorema 2.10 , y dado que X es completo,
existe x ∈∞
n =0
Bn . Pero por
la construcci ón, x /∈∞
n =1
An , y por tanto, X ⊈∞
n =1
An , lo cual es una contradicci ón.
2.3. Convergencia Uniforme
En esta secci ón, a diferencia del enfoque que se le ha dado al
curso, nos limitaremos aestudiar sucesiones de funciones de R (o de
un subconjunto A ⊆R) en R.Denici´ on 2.4. Consideremos una sucesi
ón de funciones {f n |f n : A ⊆ R → R}, dondecada sucesión {f n
(x)} converge (es decir, {f n (x)} es fundamental) para todo x ∈
A.Podemos por tanto denir una funci´ on f : A ⊆R →R con regla de
correspondencia
f (x) = ĺımn→∞
f n (x)
y diremos que f es la funcíon ĺımite , o que f n converge
puntualmente a f .
Es natural preguntarnos que propiedades tiene f . Si cada f n es
(uniformemente) continua,integrable, diferenciable, ¿ f es
(uniformemente) continua, integrable, diferenciable? ¿Bajo
que condiciones se cumple, por ejemplo, que ĺımn→∞∫ f n = ∫
ĺımn→∞f n = ∫ f ?, ¿o que
ĺımn→∞f ′n = ĺımn→∞f n ′ = f ′?Por ejemplo, para que f sea
continua en x se debe cumplir que ĺım
t→xf n (t) = f (x). Y esto
es equivalente a que el siguiente ĺımite doble se pueda
intercambiar:
ĺımt→x
f n (t) = ĺımt→x
ĺımn→∞
f n (t) = ĺımn→∞
ĺımt→x
f n (t) = ĺımn→∞
f n (x)
Antes de establecer las condiciones sucientes para garantizar el
intercambio del ĺımitecon la integral o la derivada, o ambos
lı́mites en el caso de la continuidad, mostraremosuna serie de
ejemplos que demuestran que, en general, no podemos realizar la
operaci´ on.
Ejemplo 2.3. Consideremos, para n ∈Z+ , f n : R →R, f n (x) =
x2
1 + x2 n , y
gn (x) = f 0(x) + f 1(x) + . . . + f n (x) ⇒g(x) = ĺım
n→∞gn (x) = ĺım
n→∞
n
k=0
x2
1 + x2 k = x2 ĺım
n→∞
n
k=0
11 + x2 k
(2.1)
26
-
8/18/2019 Curso Analisis 2016
27/62
Es claro que si x = 0, gn (0) = 0, y por tanto, g(0) = 0. Sin
embargo, si x ̸= 0, la fórmula(2.1) dene una serie geométrica de
raz´on (1 + x2)−1 < 1, multiplicada por x2. Entonces
g(x) = x2
ĺımn→∞
n
k=0
1
1 + x2 k = x2
ĺımn→∞1
−(1 + x2)−n−1
1 −(1 + x2)−1= x2
11+ x2 −11+ x2
= x21 + x2
x2 = 1 + x2
con lo que vemos que la función ĺımite de una sucesi´on
convergente de funciones continuasno necesariamente es
continua.
Ejemplo 2.4. Consideremos ahora, para n ∈ N, f n : R → R, f n
(x) = sen nx
√ n . Primeroobservamos que, dado ε > 0, podemos escoger N
> 0 tal que
1√ N < ε . Entonces, si
n ≥ N , para toda x,sen nx
√ n ≤ 1
√ n < ε , lo que implica que f n (x) → 0. Además:
|f n (x) −f n (y)| ≤sen nx√ n −
sen ny√ n ≤
sen ny√ n +
sen ny√ n ≤
1√ n +
1√ n < 2ε
Si bien todav́ıa no hemos denido la convergencia uniforme,
veremos m´ as adelante que estadesigualdad implica que f n converge
uniformemente a f (x) = 0. En particular, f ′(x) = 0.Sin embargo, f
′n (x) = √ n cos nx , y
ĺımn→∞
f ′n (0) = ĺımn→∞√ n
no existe (o bien, el ĺımite tiende a
∞). Es decir, si aceptamos por un momento que
f nu
→ 0, ni siquiera la convergencia uniforme nos garantiza la
convergencia de la derivada.Ejemplo 2.5. Para n ∈ N, sea f n : [0,
1] → R, f n (x) = nx(1 − x2)n . Si 0 < x ≤ 1,ĺımn→∞
f n (x) = 0 3, y además, f n (0) = 0, por tanto,
ĺımn→∞
f n (x) = 0 ∀x ∈ [0, 1]Ahora bien, si hacemos el cambio de
variable u = 1 −x2, du = −2xdx, y
∫ 1
0x(1 −x2)n dx =
12 ∫
1
0un du =
12
un +1
n + 1
1
0=
12(n + 1) ⇒
ĺımn→∞∫ 1
0 f n (x)dx = ĺımn→∞n
2(n + 1) = 12
Y por otra parte, ∫ 1
0ĺım
n→∞f n (x) dx = 0.
3 Esta armaci´on, aunque no muy obvia, se sigue del hecho de que
ĺımn →∞
n α
(1 + p)n= 0, para α > 0,
p > 0
27
-
8/18/2019 Curso Analisis 2016
28/62
Con estos ejemplos es claro que no podemos intercambiar
libremente los śımbolos de ĺımitecon el de otro ĺımite, o con la
derivada o la integral. Necesitamos por tanto un tipo
deconvergencia m ás estricto.
Denici´ on 2.5. Diremos que una sucesión de funciones {f n |f n
: A ⊆ R → R}, convergeuniformemente en A a una función f si para
todo ε > 0, existe un entero N > 0 tal quesi n ≥ N ,
entonces
|f n (x) −f (x)| < εpara todo x ∈ A.Toda sucesi ón de
funciones uniformemente convergente es convergente, pero como
quedaclaro de los ejemplos anteriores, la implicaci ón es en una
sola dirección.
El siguiente es el criterio de Cauchy para convergencia
uniforme.
Teorema 2.12. Una sucesi´ on de funciones {f n}, f n : A ⊆ R → R
converge uniforme-mente en A si y s´ olo si para todo ε > 0
existe un N > 0 tal que si n, m ≥ N ,|f n (x) −f m (x)| <
ε
para todo x ∈ A.Demostraci ón . ⇒) Si f n converge
uniformemente a f , dado ε > 0, existe N > 0 talque si n ≥ N
, |f n (x) −f (x)| < ε para todo x ∈ A. Entonces
|f n (x) −f m (x)| ≤ |f n (x) −f (x)|+ |f m (x) −f (x)| <
2εsiempre que n, m ≥ N , y para todo x ∈ A. ⇐) La condición de
Cauchy implica que, paracada x ∈ A, {f n (x)}es una sucesión de
Cauchy en R, y podemos denir f (x) = ĺımn→∞f n (x).Dado ε > 0,
existe N > 0 tal que si n, m ≥ N , entonces |f n (x) −f m (x)|
< ε . Ahora, paracada x ∈ A, existe nx ≥ N , tal que |f n (x) −f
(x)| < ε . Por tanto, si n ≥ N y x ∈ A,
|f n (x) −f (x)| ≤ |f n (x) −f n x (x)|+ |f n x (x) −f (x)| <
2εy se sigue que f n converge uniformemente a f en A.
Teorema 2.13. Sea {f n : A ⊆ R → R}, tal que f n converge
uniformemente. Sea x un punto ĺımite de A, y sup´ ongase que
ĺımt→x
f n (t) = yn . Entonces la sucesi´ on
{yn
} converge, y
ĺımt→x
f (t) = ĺımn→∞
yn .
Demostraci ón . Sea ε > 0. Dado que f n converge
uniformemente a f , existe N > 0 talque, para todo t ∈ A, |f n
(t) −f m (t)| < ε . Ahora,
|yn −ym | ≤ |yn −f n (t)|+ |f n (t) −f m (t)|+ |f m (t) −ym |
< 3ε
28
-
8/18/2019 Curso Analisis 2016
29/62
pues tanto f n (t) → yn , y f m (t) → ym . Por tanto, {yn} es
fundamental en R, por lo queconverge a algún y ∈R. Ahora:
|f (t)
−y
| ≤ |f (t)
−f n (t)
|+
|f n (t)
−yn
|+
|yn
−y
|Obsérvese que |f (t) −f n (t)| < ε por la convergencia
uniforme, |yn −y| < ε , que es lo queacabamos de demostrar.
Finalmente, |f n (t) −yn | < ε , donde t ≠ x (x es punto
ĺımite deA). Por tanto, |f (t) −y| < 3ε, lo cual implica que
ĺımt→x f (t) = ĺımn→∞yn .Con este resultado, tenemos como
corolario inmediato el resultado que nos indica quela convergencia
uniforme es una condici ón suciente para la continuidad de la
funci´ onĺımite 4
Corolario 2.14. Si {f n : A ⊆ R → R} es una sucesi´ on de
funciones continuas que converge uniformemente a f , entonces f es
continua.La demostraci ón se sigue directamente del teorema
anterior.
No obstante lo anterior, bajo condiciones espećıcas, la
convergencia puntual nos implicar´ ala convergencia uniforme. Por
ejemplo:
Teorema 2.15. Si K ⊆R es compacto, y {f n : K →R} sucesi´ on de
funciones continuas,y adem´ as:i {f n} converge puntualmente a una
funci´ on continua f en K .
ii f n (x)
≥ f n +1 (x) para todo x
∈ K , n
∈N.
Entonces {f n} converge uniformemente a f en K .Demostraci ón .
Consideremos gn = f n −f . gn es continua, converge puntualmente a
0,t y gn ≥ gn +1 . Por demostrar que gn converge uniformemente a
0.Sean ε > 0, y K n = {x ∈ K |gx (x) ≥ ε}. Cada K n ⊆ K es
cerrado (teorema 1.15 , iii),y por tanto, compacto (teorema 1.10 ).
Y dado que gn ≥ gn +1 , entonces K n +1 ⊆ K . Seax ∈ K jo. Como por
hipótesis, gn (x) converge a 0, existe N > 0 tal que si n ≥ N
,entonces x /∈ K n , y por tanto, x /∈∩K n . Se sigue que ∩K n = ∅.
Esto implica que existeN > 0 tal que K N = ∅ (teorema 1.12 ).
Por tanto, 0 ≤ gn (x) < ε siempre que n ≥ N , ypara todo x ∈ K .
Por tanto, gn → 0 uniformemente.En diversas ocasiones se ha
mencionado que la convergencia uniforme de funciones esequivalente
a la convergencia puntual bajo la métrica del supremo. El
siguiente resultadonos precisa esta equivalencia.
4 La condici ón no es necesaria. En el ejemplo 2.5 , la
sucesión de funciones f n = nx (1 −x 2 )n convergepuntualmente a
la funci´ on idénticamente 0, que es continua.
29
-
8/18/2019 Curso Analisis 2016
30/62
Teorema 2.16. Sean {f n : A ⊆ R → R} una sucesi´ on de funciones
tal que f n converge a f , y M n = supx∈A
{|f n (x) −f (x)|}. Entonces f n converge uniformemente a f si y
s´ olo śı ĺım
n
→∞
M n → 0.Demostraci ón . ⇒) Si f n converge uniformemente a f ,
dado ε > 0, existe N > 0 tal quesi n ≥ N , para toda x ∈ A,
|f n (x) −f (x)| < ε . Pero esto último implica que ε es una
cotasuperior de |f n (x) −f (x)|, y por tanto, supx∈A |
f n (x) −f (x)| ≤ ε, o de forma equivalente,ĺım
n→∞supx∈A
M n = 0.
⇐) Sea M n = supx∈A{|f n (x) −f (x)|}, con ĺımn→∞M n = 0, es
decir, dado ε > 0, existe N > 0 tal
que si n ≥ N , supx∈A{|f n (x) −f (x)|} < ε . , es decir,
siempre que n ≥ N , |f n (x) −f (x)| < ε
para para todo x ∈ A. Por tanto, f n converge uniformemente a f
.
2.3.1. Convergencia Uniforme e Integrací on
Ahora estamos listos para probar la condici´ on suciente para
que podamos intercambiarlos signos de ĺımite con el de
integral.
Teorema 2.17. Sea {f n : [a, b] ⊆R →R}una sucesi´ on de
funciones Riemann-integrables.Si f n converge uniformemente a f en
[a, b], entonces f es Riemann-integrable en [a, b], y ĺım
n→∞∫ b
af n (x)dx = ∫
b
a [ĺımn→∞f n (x) dx = ∫ b
af (x)dx
Demostraci ón . Sea εn = supx∈[a,b]
{|f n (x) −f (x)|}. De esta desigualdad, se tiene que, paratodo
x ∈ [a, b], εn ≥ f n (x) −f (x) y εn ≥ f (x) −f n (x), de donde
f n (x) −εn ≤ f (x) ≤ f n (x) + εn ⇒∫
b
a(f n (x) −εn )dx ≤∫
b
af (x)dx ≤∫
b
a(f n (x) + εn )dx ⇒
∫ b
a(f n (x) −εn )dx ≤∫
b
af (x)dx ≤∫
b
af (x)dx ≤∫
b
a(f n (x) + εn )dx ⇒ (2.2)
0 ≤∫ b
af (x)dx −∫
b
af (x)dx ≤ 2εn (b−a)
y esto implica la existencia de la integral de f . También, de
(2.2) se sigue que
∫ b
af (x)dx −∫
b
af n (x) ≤ ε(b−a)
30
-
8/18/2019 Curso Analisis 2016
31/62
Y por tanto, ∫ b
af (x)dx = ĺım
n→∞∫ b
af n (x)dx.
2.3.2. Convergencia Uniforme y Diferenciaci´ on
El ejemplo 2.4 se vió que ni siquiera la convergencia uniforme
nos garantiza la convergenciade la derivada. Se requiere ser m ás
estricto.
Teorema 2.18. Sea {f n : [a, b] → R} una sucesi´ on de funciones
diferenciables en [a, b].Sup´ ongase que {f n (x0)} converge para
algun x0 ∈ [a, b]. Si {f ′n} converge uniformemente en [a, b],
entonces {f n} converge uniformemente en [a, b] a una funci´ on f ,
y f ′(x) = ĺım
n→∞f ′n (x)
para todo x
∈ [a, b].
Demostraci ón . Sea ε > 0. Por la convergencia de {f n (x0)}
y la convergencia uniformede {f ′n}, existe N > 0 tal que, si n,
m ≥ N
|f n (x0) −f m (x0)| < ε2
|f ′n (t) −f ′m (t)| < ε
2(b−a) (2.3)
Y la segunda desigualdad es v álida para todo t ∈ [a, b]. Al
aplicar el terorema del valormedio a la función f n −f m 5 en el
intervalo [x, t ] (o [t, x ]), se obtiene, para alg ún τ ∈ [x, t
]:|f n (x) −f m (x) −f n (t) + f m (t)| = |x −t| |f ′n (τ ) −f ′m
(τ )|
≤ |x −t|ε
2(b−a) ≤ ε2
(2.4)
y la desigualdad (2.4), que es consecuencia de (2.3), es v
álida para todos x, t ∈ [a, b]. Deaquı́ se sigue que:|f n (x) −f m
(x)| ≤ |f n (x) −f m (x) −f n (x0) + f m (x0)|+ |f n (x0) −f m
(x0)| < ε
Y por tanto, f n converge uniformemente. Entonces tiene sentido
denir, para todo x ∈[a, b], f (x) = ĺımn→∞
f n (x).
Ahora, para x jo, denimos las siguientes funciones:
ϕn (t) = f n (t) −f n (x)
t −x ϕ(t) =
f (t) −f (x)t −x
5 Teorema del valor medio Si f : [a, b ] → R, f diferenciable en
( a, b ), existe un punto t ∈ [a, b ] talque f (b) −f (a ) = f ′
(t)(b −a ).
31
-
8/18/2019 Curso Analisis 2016
32/62
con a ≤ t ≤ b, t ≠ x. Dado que cada f n es diferenciable,
es claro que ĺımt→x ϕn (t) = f ′n (x).Por otra parte, por
(2.4),|ϕn (t) −ϕm (t)| ≤
ε2(b
−a)
siempre que n, m ≥ N , por lo que {ϕn} converge uniformemente si
t ̸= x. Además, y dadoque f n → f uniformemente, ĺımn→∞ϕn (t) =
ϕ(t) si t ̸= x. Ahora, aplicamos el teorema 2.13a la sucesión
{ϕn}, y como x es un punto ĺımite de [ a, b],ĺımt→xϕ(t) =
ĺım
t→xĺım
n→∞ϕn (t) = ĺım
n→∞ĺımt→xϕn (t) = ĺım
n→∞f ′n (x)
y ĺımt→xϕ(t) = f ′(x), por la denición de ϕ.
2.4. Teorema de Punto Fijo
Regresamos a espacios métricos generales. En esta secci´on,
consideraremos aplicacionesde un espacio métrico en śı mismo.
Denici´ on 2.6. Diremos que una funci ón f : X → X es una
contracci´ on si existe0 < M < 1 tal qued(f (x), f (y)) ≤ M
d(x, y)
Es fácil checar que si f es una contracci ón, entonces f es
uniformemente continua.
Teorema 2.19. Sea f : X → X una contracci´ on, X espacio
métrico completo. Entonces f tiene un punto jo, y éste es ´
unico.El teorema puede ser formulado en los siguientes términos:
Si f : X → X es una contrac-ción, y X es completo, entonces la
ecuaci ón f (x) = x tiene solución única.Demostraci ón . Sea x0
∈ X , y denamos la siguiente sucesión: {xn = f n (x0)}. Paratoda n
∈N
d(xn , xn +1 ) = d(f n (x0), f n (f (x0))) ≤ M n d(x0, f (x0)) =
M n d(x0, x1)La sucesión {xn} es fundamental. En efecto, sea ε
> 0, y consideremos N > 0 tal queM N 1
−M
d(x0, x1) < ε . Supongamos sin pérdida de generalidad que N
≤ m ≤ n, entoncesd(xm , xn ) ≤ d(xm , xm +1 ) + d(xm +1 , xm +2 ) +
· · ·+ d(xn−1, xn )
≤ M m d(x0, x1) + M m +1 d(x0, x1) . . . + M n−1d(x0, x1)= M m 1
+ M + M 2 + . . . + M n−m−1 d(x0, x1)
≤ M N 1
1 −M d(x0, x1) < ε
32
-
8/18/2019 Curso Analisis 2016
33/62
Dado que X es completo, existe ξ ∈ X tal que xn → ξ , y f es
continua, por lo que sesigue del teorema 1.20 que:f (ξ ) = f
ĺım
n→∞xn = ĺım
n→∞f (xn ) = ĺım
n→∞xn +1 = ξ
lo cual demuestra la existencia del punto jo. Para demostrar la
unicidad, supongamosque ζ ∈ X también es punto jo. Por la denici´
on de contracci ón:
d(ξ, ζ ) = d(f (ξ ), f (ζ )) ≤ M d(ξ, ζ )y dado que M < 1,
esto implica que d(ξ, ζ ) = 0, o ξ = ζ .
Como puede verse, la demostraci´on del teorema anterior es
directa, y proporciona unmétodo para encontar el punto jo. En
ocasiones se reere al teorema anterior como elmétodo de
“aproximaciones sucesivas”. El teorema en si admite la siguiente
generalizaci´ on.
Teorema 2.20. Sea f : X → X funci´ on continua tal que f n es
una contracci´ on para alg´ un n. Entonces f tiene un punto jo, y
éste es ´ unico.Demostraci ón . Sea x0 ∈ X , y consideremos la
sucesión xn k = f nk (x0). Omitimos lademostraci ón de que {xn k
} es fundamental y converge, dado que es idéntica a la delteorema
2.19 . Sea
ξ = ĺımk→∞
xn k = ĺımk→∞
f nk (x0) ⇒f (ξ ) = f ĺım
k→∞f nk (x0) = ĺım
k→∞f nk +1 (x0) (2.5)
por la continuidad de f . Y dado que f n
es una contracci ón:d(xk , f (xk)) = d(f nk (x0), f nk +1 (x0))
≤ M kd(x0, f (x0)) ⇒
ĺımk→∞
d(f nk (x0), f nk +1 (x0)) = 0
y se sigue que f (ξ ) = ξ . Para la unicidad, dado que cualquier
punto jo de f es a la vezpunto jo de f n , y f n es una contracci
ón, el punto jo es único.
Ejemplo 2.6. Sea f : [a, b] → [a, b] que verica la condición de
Lipschitz|f (x) −f (y)| ≤ M |x −y|
con M < 1. f es una contracci ón, y por el teorema 2.19 , f
tiene un punto jo único en[a, b].En particular, si f es
diferenciable en [a, b], y la derivada es tal que
|f ′(x)| ≤ M < 1entonces no es dif́ıcil demostrar que f es
una contracci ón.
33
-
8/18/2019 Curso Analisis 2016
34/62
Ejemplo 2.7. Supongamos ahora que tenemos una ecuaci´on del tipo
f (x) = 0, con f diferenciable en [a, b], que cumple f (a) < 0,
f (b) > 0, y 0 < M 1 ≤ f ′(x) ≤ M 2 en [a, b].Para encontrar
la raiz, consideremos la funci´ on g(x) = x −λf (x), λ ∈ R, y el
problemase reduce a encontrar un punto jo de g. Ahora, g′(x) =
1
− λf ′(x), lo que implica
1 −λM 2 ≤ g′(x) ≤ 1 −λM 1. Por tanto, si podemos encontrar λ tal
que
−1 < 1 −λM 2 ≤ g′(x) ≤ 1 −λM 1 < 1g(x) será una contracci
ón, y se podrá resolver el problema original.
Ejemplo 2.8. Consideremos ahora una función lineal f : Rn → Rn
, y la métricad∞(x, y) = m áx1≤i≤n |xi −yi|. Cualquier funci ón
lineal puede expresarse en términos de unsistema de n ecuaciones
lineales:
yi =
n
j =1a ij x j + bi ; 1 ≤ i ≤ n (2.6)
Ahora, si y = f (x), y′ = f (x′):
d∞(y −y′) = m áx1≤i≤n |yi −y′i| = m áx1≤i≤nn
j =1
a ij (x j −x′ j )
≤ máx1≤i≤nn
j =1|a ij | x j −x′ j ≤ máx1≤i≤n
n
j =1|a ij | máx1≤i≤n x j −x′ j
= m áx1≤i≤n
n
j =1 |a ij |d∞(x, x ′)Y por tanto, la condici ón de contracci
ón es
máx1≤i≤n
n
j =1|a ij | ≤ α < 1 (2.7)
Ejemplo 2.9. Consideremos la funcíon denida por (2.6), pero
ahora la métrica es
34
-
8/18/2019 Curso Analisis 2016
35/62
d1(x, y) =n
i=1|xi −yi|. Como antes, si escribimos y = f (x), y′ = f
(x′):
d1(y, y′) =n
i=1|yi −y′i| =
n
i=1
n
j =1a ij (x j −x′ j ) ≤
n
i=1
n
j =1|a ij | x j −x′ j
= |a11| |x1 −x′1|+ |a12| |x2 −x′2|+ . . . + |a1n | |xn −x′n |+
|a21| |x1 −x′1|+ |a22| |x2 −x′2|+ . . . + |a2n | |xn −x′n |+ . . .+
|an 1| |x1 −x′1|+ |an 2| |x2 −x′2|+ . . . + |ann | |xn −x′n |
≤ máxi≤ j≤nn
i=1|a ij | |x1 −x′1|+ |x2 −x′2|+ . . . + |xn −x′n |
= m áxi≤ j≤n
n
i=1 |a ij |d1(x, x ′)Por lo que la condición de contracci ón
es ahora
máx1≤ j≤n
n
i=1|a ij | ≤ α < 1 (2.8)
Ejemplo 2.10. De nuevo, la función es la denida por (2.6), y la
métrica es la euclideana.Como antes, si escribimos y = f (x), y′ =
f (x′):
d2(y, y′) 2 =n
i=1
n
j =1a ij (x j −x′ j )
2
≤n
i=1
n
j =1
a2ijn
j =1
(x j −x′ j )2 ≤n
i=1
n
j =1
a2ij d2(x, x ′)2
Por lo que la condición de contracci ón es ahoran
i=1
n
j =1
a2ij ≤ α < 1 (2.9)
Si recapitulamos los resultados de los ejemplos 2.8 , 2.9 y 2.10
, cualquiera de las con-diciones (2.7), (2.8) y (2.9) son sucientes
para garantizar que el sistema de ecuacioneslineales (2.6) tiene un
único punto jo. Sin embargo, las condiciones no son necesarias
.Para ver esto, consideremos la siguiente funci´on f : R2 →R2,
y1y2
= cosθ −sen θsen θ cosθ x1x2
= x1 cosθ −x2 sen θx1 sen θ + x2 cosθ35
-
8/18/2019 Curso Analisis 2016
36/62
con 0 < θ < 2π, es decir, una rotaci ón de θ alrededor
del origen. Claramente, 0 es puntojo de f , y además es único.
Sin embargo:
máx1≤i≤n
n
j =1 |a ij | = m áx1≤ j≤nn
i=1 |a ij | = |cos θ|+ |sen θ| ≥ 1n
i=1
n
j =1
a2ij = 2 cos2 θ + 2 sen 2 θ = 2
2.4.1. Aplicaciones
Teorema 2.21 (Teorema de Picard ). Sea f una funci´ on continua
en un dominioplano6, con (x0, y0) ∈ G. Supongamos que f satisface
la condici´ on de Lipschitz en la variable y:
|f (x, y1) −f (x, y2)| ≤ M |y1 −y2|Entonces existe un intervalo
|x −x0| ≤ δ en el cual la ecuaci´ on diferencial
dydx
= f (x, y)
tiene una ´ unica soluci´ on y = ϕ(x) que satisface la condici´
on inicial ϕ(x0) = y0.
Demostraci ón . Es equivalente solucionar la ecuaci ón
integral
ϕ(x) = y0 + ∫ x
x0 f t,ϕ(t) dt
Por la continuidad de f , |f (x, y)| ≤ K en algún dominio G′ ⊆
G, con (x0, y0) ∈ G′7 Seanδ > 0 tal que:1. (x, y) ∈ G′ si |x
−x0| ≤ δ , |y −y0| ≤ δK .2. Mδ < 1.
y C ∗ = {ϕ : [x0 −δ, x0 + δ ] → [y0 −δK,y0 + δK ]} con la
métrica del supremoρ(ϕ1,ϕ2) = sup
|t−x0 |≤δ |ϕ1(t) −ϕ2(t)|6 Un dominio es un conjunto abierto y
conexo7 De hecho, esto se sigue del hecho (todav́ıa no demostrado)
de que los compactos en Rn son cerrados
y acotados. Este resultado se ver´ a en el siguiente caṕıtulo
(corolario 3.10 ).
36
-
8/18/2019 Curso Analisis 2016
37/62
C ∗ es completo, pues es un subespacio cerrado de C [x0 −δ,x 0 +
δ] (Teorema 2.3 ). Consideremosahora g : C ∗ → C ∗:
ψ(x) = g(ϕ(x)) = y0 + ∫ x
x 0f t,ϕ(t) dt
Si ϕ ∈ C ∗:
|ψ(x) −y0| = ∫ x
x0f t,ϕ(t) dt ≤∫
x
x0f t,ϕ(t) dt ≤ K |x −x0| ≤ Kδ
y por tanto, ψ = g(ϕ) ∈ C ∗. Por otra parte:
|ψ1(x) −ψ2(x)| = ∫ x
x0f t,ϕ1(t) −f t,ϕ2(t) dt
≤∫
x
x0
f t,ϕ1(t)
−f t,ϕ2(t) dt
≤ M |ϕ1(x) −ϕ2(x)| |x −x0| ≤ M δρ(ϕ1,ϕ2)Es decir, ρ(ψ1, ψ2) ≤ M
δρ(ϕ1,ϕ2), y Mδ < 1, por lo que g es una contracci ón, y g
tieneun único punto jo, lo que equivale a decir que la ecuaci ón
diferencial tiene soluci ónúnica.
Ejemplo 2.11 (Ecuaci ón integral de Fredholm del segundo tipo)
. Consideremos la ecua-ción integral:
f (x) = λ ∫ b
aK (x, y)f (y)dy + ϕ(x)
K y ϕ son funciones continuas en el cuadrado [ a, b] × [a, b].
En particular, |K (x, y)| ≤M 8. Veremos que la anterior ecuaci´on
integral tiene soluci ón para valores sucientementepequeños del
par ámetro λ. Como bien sabemos, C [a,b] es completo. Sea g : C
[a,b] → C [a,b]denida mediante:
ψ(x) = g(f (x)) = λ ∫ b
aK (x, y)f (y)dy + ϕ(x) ⇒
|ψ1(x) −ψ2(x)| ≤ |λ|∫ b
a |K (x, y)| |f 1(y) −f 2(y)|dy≤ |λ|M supx∈[a,b] |
f 1(x) −f 2(x)| (b−a)
≤ |λ|M (b−a)ρ(f 1, f 2) ⇒ρ(ψ1, ψ2) ≤ |λ|M (b−a)ρ(f 1, f 2)
Y g será una contracci ón si |λ| < 1
M (b−a).
8 Se aplica el mismo comentario que en la nota 7.
37
-
8/18/2019 Curso Analisis 2016
38/62
Ejemplo 2.12 (Ecuaci ón integral de Volterra) . Consideremos
ahora la ecuaci ón integral:
f (x) = λ ∫ x
aK (x, y)f (y)dy + ϕ(x)
A diferencia de la ecuación de Fredholm, aqúı la variable x se
encuentra en el extremosuperior de la integral. Si bien puede
considerarse a esta ecuaci´ on como un caso especialde la de
Fredholm, la situación aqúı es radicalmente distinta. Veremos que
no importa elvalor de λ, siempre podemos asegurar la existencia de
una ´unica solución para la ecuaci´onde Volterra. Como antes, |K
(x, y)| ≤ M , y sea g : C a[,b] → C [a,b]:
h(x) = g(f (x)) = λ ∫ x
aK (x, y)f (y)dy + ϕ(x)
Veremos que para alg ún n ∈N, gn es una contracci ón.
|g(f 1(x)) −g(f 2(x))| ≤ |λ|∫ x
a |K (x, y)| |f 1(y) −f 2(y)|dy
≤ |λ|M supx∈[a,b] |f 1(x) −f 2(x)|∫
x
ady
= |λ|Mρ(f 1, f 2)(x −a) ⇒ρ(gf 1, gf 2) ≤ |λ|M (x −a)ρ(f 1, f
2)
g2(f 1(x)) −g2(f 2(x)) ≤ |λ|∫ x
a |K (x, y)| |g(f 1(y)) −g(f 2(y))|dy
≤ |λ|2
M 2
ρ(f 1, f 2) ∫ x
a (y −a)dy= |λ|
2 M 2ρ(f 1, f 2)(x −a)2
2 ⇒ρ(g2f 1, g2f 2) ≤ |λ|
2 M 2ρ(f 1, f 2)(x −a)2
2
|gn (f 1(x)) −gn (f 2(x))| ≤ |λ|n M n ρ(f 1, f 2)
(x −a)nn!
≤ |λ|n M n ρ(f 1, f 2)(b−a)n
n! ⇒ρ(gn f 1, gn f 2)
≤ |λ
|n M n ρ(f 1, f 2)
(b−a)nn!
Y obsérvese que no importa cu´al sea el valor de λ, siempre se
puede tomar n > 0 sucien-
temente grande de manera que |λ|n M n (b−a)n
n! < 1. Por tanto, gn será una contracci´on,
y g(f ) = f tiene solución única.
38
-
8/18/2019 Curso Analisis 2016
39/62
3. Compacidad
3.1. Conexidad
Denici´ on 3.1. Diremos que un espacio métrico X es conexo si
no puede descomponerseen la unión de dos abiertos ajenos no
vacios.
Dicho de otra manera, si X es conexo y S, T son abiertos no
vacios tales que S ∪ T ,entonces S ∩T ≠ ∅.Teorema 3.1. Sea X
espacio métrico. Son equivalentes:
(i) X es conexo.
(ii) X no es la uni´ on de dos cerrados ajenos no vacios.
(iii ) Los ´ unicos subconjuntos de X que son tanto abiertos
como cerrados son X y ∅.
Demostraci´ on. (i) ⇒) (ii) Si S, T son cerrados ajenos no
vacios tales que S ∪ T = X ,S ∩T = ∅, entonces X \T = S y X \S = T
son abiertos no vacios, y X no puede serconexo.(ii) ⇒) (iii )
Supongamos que S ≠ ∅ es un subconjunto propio de X a la vez
abierto ycerrado. Entonces X \S = T es tambíen abierto y cerrado,
por lo que S ∪T = X , y X es la unión de dos cerrados ajenos no
vacios.(iii ) ⇒) (i) Supongamos que X no es conexo, es decir, X = S
∪T , con S ∩T = ∅, y S, T abiertos no vacios. Pero esto implica que
T = X
\S es cerrado (por ser complemento de
un abierto) y abierto.
De manera an áloga a como se clasicaron todos los abiertos de
R, el siguiente teoremanos clasica todos los conjuntos conexos de
la recta.
Proposici´ on 3.2. Un subconjunto no vacio de R es conexo si y
sólo śı es un intervalo.
Demostraci´ on. ⇒) Sea S ⊆R conexo no vacio, y a = inf {S }, b =
sup {S }, y supongamosque a ≤< ≤ b es tal que x /∈ S . Entonces
S ′ = S ∩(−∞, x), T ′ = S ∩(x, ∞) son abiertosajenos no vacios en S
tales que S ′∪T ′ = S , y esto contradice la conexidad de S , ∴ x ∈
S para toda x ∈ (a, b), y S es un intervalo.
⇐) Sea S un intervalo, y supongamos que no es conexo. Existen
abiertos relativos ajenosno vacios tales que A∪B = S . Consideremos
a = ı́nf {A}, y b = sup{B}, y supongamossin pérdida de generalidad
que a < b. Sea ahora x = sup {A ∩S }. Si x ∈ A, por ser Aabierto
en S , existe r > 0 tal que x + r ∈ A, lo cual contradice la
denici ón de x. Porotra parte, si x ∈ B , como B es abierto en S ,
existe r ′ > 0 tal que x −r ∈ B, es decir,[x −r ′, x) ⊆ B ∩S ,
de donde [x −r ′, x) ∩A = ∅, y esto contradice también la denici´
onde X . Por tanto, X es conexo.39
-
8/18/2019 Curso Analisis 2016
40/62
Proposici´ on 3.3. Si S, T ⊆ X son tales que S es conexo, y S ⊆
T ⊂ S̄ , entonces T es conexo. En particular, S̄ es
conexo.Demostraci´ on. Supongamos que T no es conexo, y sean A, B
abiertos en T ajenos novacios tales que A∪B = T . Como S es denso
en T , A ∩S y B ∩S son abiertos relativosen S . Además, son ajenos
y no vacios, y
(A ∩S )∪(B ∩S ) = ( A∪B) ∩S = T ∩S = S por lo que S no puede ser
conexo.
En la sección de compacidad vimos que la imagen bajo una
funci´on de un conjuntocompacto es compacto. PAra la conexidad
tenemos un resultados an´ alogo.
Teorema 3.4. Sea f : X
→ Y continua. Si X es conexo, entonces f (X ) es conexo.
Demostraci´ on. Supongamos que f (X ) no es conexo, es decir,
existen abiertos ajenos novacios S, T ⊆ Y tales que f (X ) = S ∪T .
Entonces, por ser f continua, f −1(S ) y f −1(T )son abiertos en X
, ajenos no vacios, y
X = f −1f (X ) = f −1(S ∪T ) = f −1(S )∪f −1(T )y por tanto, X
no es conexo.
Como último resultado de esta secci´on, demostraremos el
Teorema Generalizado del ValorIntermedio.
Teorema 3.5. Sea f : X → R continua, y a, b ∈ f (X ). Entonces,
para todo y ∈ (a, b),existe x ∈ X tal que f (x) = y.Demostraci´ on.
Por el teorema 3.4 , f (X ) es un intervalo.
3.2. Compacidad
Retomamos el tema del curso. En la Denic´on 1.11 se denió el
que un espacio métri-co fuera compacto, a saber, si toda cubierta
abierta
{Gα
|α
∈ Λ
} de X contiene una
subcubierta nita.En lo que sigue, deniremos otro tipo de
compacidad, la propiedad de ser secuencialmente compacto, aśı como
la propiedad de ser totalmente acotado . El Teorema principal dela
sección nos proporcionar á condiciones necesarias y sucientes
bajo las cuales estaspropiedades son equivalentes.
40
-
8/18/2019 Curso Analisis 2016
41/62
Denici´ on 3.2. Diremos que un espacio métrico X es
secuencialmente compacto si cual-quier sucesión {an} ⊆ X contiene
una subsucesi ón convergente.De acuerdo al teorema 1.21 , todo
espacio compacto es secuencialmente compacto.
Denici´ on 3.3. Sea A ⊆ X un subconjunto del un espacio métrico
X . Diremos que Aes una ε –red si para todo x ∈ X , existe al menos
un punto y ∈ A tal que d(X, y) ≤ ε.Además, un subconjunto M ⊆ X es
totalmente acotado si para toda ε > 0, existe una Aεε –red nita
de M .Observaci´ on 3.1. Si consideramos la función de distancia a
un subconjunto, podrı́amosdenir a una ε –red como un conjunto A tal
que para toda x ∈ X , ρ(x, A) ≤ ε, dondeρ(x, A) = ı́nf
y∈A{d(x, y)}.
Antes de continuar, veremos una serie de ejemplos de conjuntos
totalmente acotados.También veremos que en general, los conceptos
de acotaci´ on y de acotación total no sonequivalentes.
Ejemplo 3.1. Un conjunto M totalmente acotado es acotado. Sea ε
> 0, y Aε una ε –rednita de M . Podemos suponer sin pérdida de
generalidad que ε < 1. Para x ∈ X jo,consideremos las distancias
de x a cada punto de Aε . Dado que este último conjunto esnito,
podemos denir sin ambig üedad
r = m áxx k∈A ε {d(x, x k)} > 0
y por tanto, M ⊆ B(x, r + 1).Ejemplo 3.2. En Rn (o en Cn ),
acotaci ón ⇒ acotaci ón total. Sea M ∈ Rn acotado, esdecir,
existen x ∈ Rn y r > 0 tales que M ⊆ B(x, r ). Siempre podemos
construir unn−cubo H de arista k > 0 lo sucientemente grande tal
que M ⊆ H . Sea ε > 0, y porla propiedad arquimediana de los
reales, existe m ∈ N tal que mε < r ≤ (m + 1)ε. Portanto,
podemos dividir el cubo H en a lo más (m + 1) n n−cubos de arista
ε, y los vérticesde estos n−cubos forman una
√ nε2
–red nita de H , y por tanto de M . Por tanto M estotalmente
acotado.
Ejemplo 3.3. En general, acotado ⇏ totalmente acotado. Para
demostrar esta afrima-
ción, consideremos el espacio l2 = {xn} ⊆R|∞
k=1
x2k < ∞ , con la métrica
d(x, y) = ∞
k=0
(xk −yk)21/ 2
41
-
8/18/2019 Curso Analisis 2016
42/62
En este espacio, sea S∞ = x ∈ l2|∞
k=1
x2k = 1 la esfera unitaria en l2. Es obvio que
S∞ es acotado. Para mostrar que no es totalmente acotado,
consideremos los siguientes
puntos en S∞:e1 = (1 , 0, 0, . . . , 0, . . .), e2 = (0 , 1, 0,
. . . , 0, . . .), . . . , ek = (0 , 0, 0, . . . , 1, . . .), . .
.
Si n ≠ m, d(en , em ) =√ 2, y por tanto, para todo ε <
√ 2
2 no puede existir una ε−red
nita de S∞, y S∞ no es totalmente acotado.
Ejemplo 3.4 (Ladrillo de Hilbert) . Este es un ejemplo de un
conjunto totalmente acotadode dimensión innita. En l2 consideremos
el conjunto Π de los puntos x = ( x1, x2, . . . , x k , . . .
)tales que
|x1| ≤ 1; |x2| ≤ 1
2; |x3| ≤ 1
22 ; . . . ; |xk|