Embed Size (px)
Citation preview

Real-time vibration-based propeller fault diagnosis for multicoptersBehnam Ghalamchi, Zheng Jia, and Mark W. Mueller
Abstract—Reliable health monitoring of mechanical compo-nents in aerial robotic systems is crucial to their safe operation.The highly constrained nature of aerial systems requires thatsuch systems operate with a minimum of sensing and compu-tational power. This paper proposes a method for the detectionand diagnosis of motor/propeller degradation on a multicopteraerial robot. The proposed method works by monitoring theaccelerometer output, and effectively correlates vibration powerto the motor commands, allowing it to estimate the magnitudeof a propeller’s unbalance mass. This is done directly in the timedomain with a recursive implementation. The method makeslow computational and memory demands, and relies only onthe accelerometer almost universally present on aerial robots,so that it may be easily implemented on existing platforms aswell as new designs. Experiments show reliable detection of afaulty propeller on three distinct multicopter platforms: twoquadcopters whose masses differ by more than an order ofmagnitude, and a hexacopter; one vehicle has brushed motors,two have brushless motors. The proposed method requires onlya minimum of assumptions about the vehicle’s dynamic model,and does not (for example) require knowledge of the vehicle’scenter of mass or its mass moment of inertia.
I. INTRODUCTION
UNMANNED aerial vehicles (UAVs) are used in a widerange of applications including structural inspection,
parcel delivery, search & rescue, geographic mapping, andincreasingly also as passenger-carrying drones. As they be-come more widely used, issues of reliability and safety becomeincreasingly important. The problem of reliable health mon-itoring on aerial systems is made difficult by such systems’thrust and energy constraints, as they must operate with aminimum of sensors and computational power.
A common UAV morphology is the multicopter, whichis popular due to its ability to hover and its mechanicalsimplicity, having only one moving part per actuator, and thusleading to low costs and easy maintenance. A critical point ofmechanical failure for such systems is the motor/propeller pair,with potential sources of failure including mechanical wearof the motor bearing or damage to the propellers (typicallydue to collisions or mishandling). Typical multicopters havefour propellers [1], with more safety-critical applications oftenrequiring more propellers to ensure mechanical redundancy inthe event of a failure (see e.g. [2] for a discussion on hexa-copter design for safety critical applications). Less commonly,fewer than four propellers may also be used [3], [4].
Multicopter dynamics may typically be accurately capturedby relatively simple models, allowing for the use of powerfulmodel-based estimation and control strategies. In [5] a model-based approach for estimating faults is presented, using a
The authors are with the High Performance RoboticsLab, University of California, Berkeley, CA 94720, USA.{behnam.ghalamchi,zjia,mwm}@berkeley.edu
Thau’s observer, specifically to detect sensor faults. For faultsspecific to the actuators, a popular approach is to estimatethe actual force produced by each propeller (e.g. using amodel-based observer), and to compare this to the force thatwould be expected given current motor commands. One suchapproach is presented in [6], which investigates fault-tolerancefor a hexacopter design by inverting the system dynamics fordetection; in [7] a related approach is applied to an octocopterand also in [8] for a quadcopter. Similarly, in [9] a model-based approach is presented where an additive disturbanceis estimated for each actuator, acting as a reduction in theproduced thrust. There, each actuator is assigned a state,which is used to estimate actuator effectiveness, and maydetect if an actuator produces a force significantly differentfrom the force an undamaged actuator produces. The directmeasurement of individual thrust forces is presented in [10],where a quadcopter is equipped with a strain gauge foreach actuator, directly measuring the force that the propellerproduces. Being a more direct approach, and not relying onthe system’s dynamics for estimating the actuator forces meansthat such an approach should be more robust to model errors(e.g. misalignment of the vehicle’s center of mass, due to apayload); however it requires the addition of multiple sensorsand specialized circuitry not typically found on multicopters.
Some control approaches have also been investigated whichare capable of accommodating an actuator fault withoutexplicit diagnosis, examples include [11], [12]. A typi-cal approach to encoding faults is as a propeller loss-of-effectiveness, wherein the produced actuator force is somefraction of the desired force, and the goal is to estimatethis fraction. An example of a (re-)planning approach forquadcopters experiencing such faults is given in [13]. Exam-ples of systems capable of rearranging their actuator loadsare hexacopters (e.g. [14]) and octocopters (e.g. [15]), whilequadcopters may execute unusual control strategies to continueflight without one of their actuators [16]. The ability ofan overactuated quadcopter-like design to survive failures isanalyzed in [17]. A comparison of model-based and data-driven fault detection is presented in [18], specifically appliedto aileron fault detection in a fixed-wing UAV.
Timely detection of a fault has obvious benefits, allowing asystem to either reconfigure its actuation strategy to reducethe load on damaged actuators, or to execute an urgentlanding to bring the vehicle to a safe state rather than riskfuture catastrophic failure. In less extreme circumstances, faultdetection may be used for condition-based maintenance, allow-ing an operator to understand the evolution of their systemhealth [19]. Much prior work exists on vibration-based faultdiagnosis, especially for condition-based maintenance. This isoften motivated by the desire to detect/predict tooth-failurein gearboxes (see, e.g., [20], [21] and references therein). A

broader review, including methods using microphones, is givenin [19]. Timely identification of faults is especially importantfor helicopters, where failure of power transmission may belife-threatening. A review of approaches to identify faults inthe power transmission system for helicopters may be found in[22]. Often, the goal is simply to determine whether currentlyobserved vibration levels are indicative of a failure condition,by e.g. comparing statistical features to threshold values [20].For gearboxes, identification is simplified because all rotatingcomponents are mechanically coupled. An approach for agearbox with varying speed and load is given in [23], whichcombines hypothesis testing with a data-driven auto-regressivewith exogenous variables (ARX) model for fault identification.
Herein we present a method for identifying that a failurecondition is present in a multicopter UAV, and specificallywhich motor/propeller pair is faulty, using only already-presentsensors. The method uses the power in the accelerometersignal, and is thus related to, e.g., the root-mean-squaremethods of [20]. Identifying which motor/propeller pair isdamaged is complicated by the presence of multiple rotatingsources operating at nearly the same operating points, butvarying rapidly and independently, making application of ex-isting approaches problematic. Moreover, limited memory andcomputation motivates the use of a recursive algorithm, thatdoes not require collecting and analyzing batched data. Theproposed approach requires a minimum of model knowledgeof the system, specifically only requiring the vehicle’s approx-imate total mass, and access to accelerometer measurementsand commanded motor forces. The approach is encoded asan extended Kalman filter (EKF), as this specifically allowsus to relatively easily reason about uncertain quantities incomplex mechatronic systems. The EKF approximately solvesthe Bayesian estimation problem for a dynamic nonlinearsystem, given noisy measurements related to the quantities ofinterest [24]. The extended Kalman filter can be implementedon even low-cost modern microcontrollers, leading to it beingwidely used in mechatronic systems.
This expands on our prior work in [25], wherein wepresented a Fourier-transform-based method for fault identifi-cation using accelerometer measurements. In that work, iden-tification required the buffering of a sequence of accelerometermeasurements while the vehicle executed carefully designedflight patterns, and the offline analysis of this data. In con-trast, the algorithm presented here does not require speciallydesigned trajectories, and can be run in real-time even on veryconstrained computational hardware.
Specifically, we present a Kalman-filter-based approach thatestimates an unbalance for each propeller, taking as input theaccelerometer measurements and the motor force commands.The approach is theoretically motivated and analyzed, andthen validated in experiment. A scaling argument is presentedfrom which follows that the estimator is likely to be (weakly)more effective on smaller vehicles, as compared to largervehicles, as well as on vehicles with fewer propellers. Exper-imental validation is done over three vehicles, including twoquadcopters and a hexacopter; with the largest vehicle beingthirty times more massive than the smallest; and where onevehicle uses brushed motors, and two use brushless (speed
controlled) motors. Experiments also compare the results fortwo different trajectories – one more sedate, and the othermore informative. Importantly, though the estimator has sometuning factors that must be specified during implementation,we show successful identification across all three experimentalplatforms with equal parameter settings.
The contribution of this paper is thus 1) the developmentof a novel propeller fault detection algorithm, based on ac-celerometer readings of vibrations due to unbalances on thepropellers, 2) analysis of scaling effects for this estimatorbased on vehicle size and design, 3) discussion on the effectof the flight trajectory on the estimator’s ability to identify afaulty propeller, and 4) experimental validation of the approachover three distinct vehicles, with multiple trajectories.
The paper proceeds by presenting the necessary dynamicsmodelling, the fault estimation algorithm, a discussion on theeffect of vehicle size and the flown trajectories, experimentalresults, and finally a conclusion.
II. MODEL
In this section we briefly review the fundamentals of multi-copter dynamics, and then develop the relationship betweenthe vehicle’s accelerometer output and the unbalances onthe vehicle’s propellers. We also give brief discussions onmulticopter propeller speed control, which is required forthe estimator, and force allocation, which is required whendiscussing scaling effects.
A. Multicopter dynamics
We model the multicopter as a central body (comprisinga battery, sensors, payload, etc.) connected to Np propellerswith a collective mass of mb. The position of the vehicle’scenter of mass, expressed in the inertial frame, is written asx, with corresponding acceleration vector x. We assume thatthe propellers have equal radius rp and are arranged to rotatearound the body-fixed thrust direction e3, with alternatinghandedness. Each propeller i rotates at some angular velocityωi relative to the vehicle body, and produces a thrust force fiacting on the vehicle body which is related to the propeller’sangular speed through the constant κf,i as (see, e.g., [1])
fi = κf,iω2i (1)
Additional external forces may act on the system, such asaerodynamic disturbances, captured by the force fd. Thetranslational acceleration of the system’s center of mass isthen given by
mbx = Re3
∑i
fi +mbg + fd (2)
The rotation matrix R evolves as a function of the vehiclebody-frame’s angular velocity ω relative to the inertial, andthe corresponding angular acceleration α is a function of theexternal moments τ acting on the system, and the vehicle’smass moment of inertia J according to
τ = Jα+ ω × (Jω) (3)

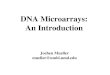
Fig. 1. A quadcopter that has a damaged propeller, indicated by the unbalanceon propeller 1. The triad e1, e2, and e3 define a body-fixed frame.
The translational dynamics are required for the discussion ofthe accelerometer output as discussed next, and the rotationaldynamics will be used to discuss force allocation when con-trolling a multicopter.
B. Unbalance and accelerometer measurement
Each propeller has an unbalance of mass mu,i at a distanceru,i from its center of rotation, illustrated for the case ofquadcopter in Fig. 1. Note that a damaged propeller canequivalently have a negative mass “added” where the damageis, or a positive mass on the opposite side. The angle ofthe unbalance with respect to the body-fixed e1 is θi, withcorresponding angular speed ωi.
The rotating unbalance mass causes a radial force on theshaft and transmitted to the multicopter body, which whenexpressed in the body-fixed coordinate system is given belowas fu,i
fu,i = mu,iru,iω2i
cos θisin θi
0
=mu,iru,iκf,i
fi
cos θisin θi
0
(4)
As the force is internal, it does not affect the motion of thesystem center of mass and does not appear in (2).
The vehicle is equipped with an accelerometer, whichmeasures the proper acceleration of the vehicle as expressedin the body-fixed frame, a. This proper acceleration is relatedto the forces acting on the vehicle, and the vehicle’s total massmb, as
a =1
mb
(∑i
(fu,i + fie3) + fd
)+ νa (5)
where νa captures the accelerometer’s additive noise, and fdexternal disturbance forces acting on the vehicle besides thepropeller forces and the vehicle’s weight. The summation isto be understood as over all propellers. We assume that theaccelerometer is mounted sufficiently close to the vehicle’scenter of mass that there are no significant effects due tothe vehicle’s angular velocity or angular acceleration. Wealso assume that the vehicle body is rigid so that there areno internal vibrations. Isolating now the accelerometer’s firsttwo components (i.e. those components in the plane of the
propeller blades) gives
ax =∑i
(mu,i ru,imb κf,i
fi cos θi
)+
1
mbfd,x + νa,x (6)
ay =∑i
(mu,i ru,imb κf,i
fi sin θi
)+
1
mbfd,y + νa,y (7)
For the sake of brevity, we lump the additive disturbances(sensor noise and disturbance force) together into dx, andintroduce the notation ∆i, so that
dx :=1
mbfd,x + νa,x (8)
∆i :=mu,i ru,imb κf,i
(9)
ax =∑i
∆ifi cos θi + dx (10)
with the equation for ay following similarly.
C. Propeller speed control
Control of the multicopter is achieved by varying theindividually produced motor forces to achieve specified totalforce and torque requirements (see, e.g., [1]). Typically, thisis achieved by computing commanded forces as a linearcombination of a desired total force magnitude, and a desiredthree dimensional torque. These command forces fcmd,i arethen typically converted into a commanded angular speedωcmd,i for each propeller i, through (1). Usually, each motor-propeller pair then attempts to track this commanded speedusing a dedicated electronic speed controller. Some vehicleswill instead be equipped with motors that do not offer speedcontrol, for example when using brushed direct current motors,and may instead have some open-loop mapping from desiredthrust to e.g. motor PWM command. The true angular speedof a propeller ωi will, of course, not be exactly equal to thecommanded speed in either case. This is due to the unknowndynamic response of the propeller to commands, unmodelleddynamics (e.g. aerodynamic torques acting on the propellers,or angular momentum effects due to the rotation of the body),discretization of the speed controller, etc.
As the deviation of the true angular speed from the com-manded is unknown, it is practically impossible to know orpredict the angle θi of the unbalance, even if it were known ini-tially. One solution to this problem may be to equip the motorswith additional encoders, so that their rotation may be knownwith more certainty; this is however not the approach followedin this work. Instead, the goal of the presented unbalanceestimator is to exploit only the accelerometer measurements(6)-(7) and knowledge of the propeller force commands toinfer the unbalance, without requiring any knowledge of theangles θi.
D. Force allocation
A typical approach to multicopter control is to reduce thesystem’s Np force inputs to four kinematic inputs, consistingof the vehicle’s scalar mass-normalized proper accelerationmagnitude c, and the desired angular acceleration vector α.

These can then be related to a scalar desired total forcemagnitude fΣ = mbc, and a torque vector τ through theNewton and Euler dynamic laws (2)-(3). The geometry ofthe vehicle defines a linear relationship relating the individualmotor forces to the total force and torques, represented hereby the matrix A ∈ R4×Np , so that
[cα
]= A
f1
...fnp
(11)
When controlling the vehicle, an inverse relationship isrequired to compute commanded motor forces fcmd,i, typicallythrough a linear map characterized by the ‘mixer matrix’M ∈ RNP×4, so that fcmd,1
...fcmd,Np
= M
[cα
](12)
For quadcopters, the mixer matrix is the unique inverse of A,however for vehicles with more than four propellers a pseudo-inverse is typically employed, specifically
M = AT(AAT
)−1(13)
which results in the least-norm forces to achieve the desiredtotal force and torque (see, e.g., [26] for an in-depth discussionon hexacopter control allocation). The matrices A and M arefunctions of the locations of the vehicle’s propellers relativeto its center of mass, and the propellers’ thrust-to-torquecharacteristics.
E. Propeller effectiveness
If a propeller is damaged, it may be expected that thethrust produced is less than the expected thrust – this loss ofeffectiveness may be captured by the a set of propeller coeffi-cients ηi, so that κf,i = ηiκf , with κf the nominal propellercoefficient. These coefficients are thus equivalently definedas the ratio between actual propeller thrusts and nominallyexpected thrusts. The effectiveness may be estimated online,and could also provide an indication of a fault; they are oftenidentified (and inverted) so that a vehicle may be controlledmore accurately (see, e.g. the ‘propeller factors’ of [27]).
For near-hover flight, for a symmetric vehicle where allpropellers are expected to produce equal force in hover, andassuming that the motors track the commanded velocitiesaccurately, the factors may be estimated using the averagethrust produced as below
ηi = E
[fcmd,i
fi
]≈ Npmb ‖g‖
E [fcmd,i] (14)
where mb ‖g‖ /Np is the force that each propeller shouldproduce on average. This uses the fact that, near hover, thevehicle has zero average translation, thus also zero average ac-celeration, so that the forces must average to the hover forces.This method may be compared to the proposed vibration-basedestimation, and will be used in the experimental section of thispaper.
III. ALGORITHM
This section presents the unbalance estimator, using theaccelerometer measurements to identify the propeller unbal-ances. We assume access to a reasonable estimate of the pro-pellers’ angular speeds (e.g. through the control commands),however, this is assumed sufficiently imprecise that we treatthe angles θi as unknown – and specifically we assume noknowledge about these angles, so that they are modelled asuniformly randomly distributed. The presented estimator maythus be used on any multicopter, even if it is not equipped withcomplex speed control/motor angle measurement sensors.
A. Assumptions and simplifications
The goal of the estimator is to estimate the unbalancesmu,iru,i, using the accelerometer measurements ax and ay ,but without relying on precise knowledge of the unbalanceangles θi or the true propeller speed ωi. The approach is toexploit the signal energy in the accelerometer measurements.Importantly, the estimator operates in the time domain, anddoes not require any manipulation in the frequency domain(e.g. Fourier transforms), unlike our prior work in [25]. Weassume that the motors are capable of approximately trackingthe commanded angular speeds, so that the commanded forcesare close to the true forces.
Furthermore, we assume that the propellers rotate at highspeeds, and that the unbalance angles θi at the time instantscorresponding to the accelerometer measurements may betreated as independent sequences, each being white and uni-formly distributed over [0, 2π) (in other words, assuming totalignorance of the propeller’s rotation, and that the rotation issufficiently fast so that it may be treated as white). Underthese assumptions, we can compute the expected value of theaccelerometer measurement E [·], as below
E [ax] =1
mbfd,x + να,x (15)
with fd,x and να,x representing the average disturbance forceand the accelerometer bias, respectively. Thus, the expectedaccelerometer measurement contains no information about thepropeller unbalances. The signal power, on the other hand,depends on the unbalances and will be used for the estimator.
B. Estimator measurements
We define a scalar measurement at time step k, z(k), asfollows, which is expanded upon substitution:
z(k) := ax(k)2 + ay(k)2 (16)
=∑i
∆2i fi(k)2 + dx(k)2 + dy(k)2 (17)
+∑i
∑j 6=i
∆i∆jfi(k)fj(k) cos (θi(k) − θj(k))
+∑i
2∆ifi(k) (dx(k) cos θi(k) + dy(k) sin θi(k))
The estimator uses the instantaneous signal power z(k) asmeasurement, that is a scalar measurement for each (vector-valued) accelerometer measurement. Taking the expectation of

(17), and substituting the assumption that the propeller anglesare independent and uniformly distributed yields
E [z(k)] =∑i
∆2i fi(k)2 + E
[d2x
]+ E
[d2y
](18)
This measurement is informative, as its expected value de-pends on the unbalances (mu,iru,i), with the relative influencedepending on the instantaneous motor forces fi(k), whichwill vary over the course of the flight. Intuitively, for thoseflight segments where propeller i produces a larger force, thecorresponding unbalance’s contribution to the accelerometersignal power will be larger.
The measurement uncertainty is modelled through the ad-ditive measurement noise νz(k), defined as
z(k) =: E [z(k)] + νz(k) (19)
which is zero-mean by construction, and whose variance maybe tediously computed as
Var [νz(k)] = E[νz(k)2
]= E
[z(k)2
]− E [z(k)]
2 (20)
= E[(dx(k)2 + dy(k)2
)2]− E[dx(k)2 + dy(k)2
]2+ 2
(E[dx(k)2
]+ E
[dy(k)2
])∑i
∆2i fi(k)2
+∑i
∑j 6=i
∆2i∆
2jfi(k)2fj(k)2 (21)
Evaluating the above is difficult, as it requires informationabout the fourth moment of the random variables dx and dy .However, under the assumption that these quantities are zero-mean, independent, identically, and normally distributed, withvariance σ2
d, (21) may be simplified to
Var [νz(k)] ≈4σ4d +
∑i
∑j 6=i
∆2i∆
2jfi(k)2fj(k)2
+ 4σ2d
∑i
∆2i fi(k)2 (22)
where we’ve used the fact that, for a zero-mean, normallydistributed quantity x, E
[x4]
= 3Var [x]2.
C. Estimating motor forces
From (18) it can be seen that the estimator will requireknowledge of the propeller forces, or equivalently the angularspeed of the propellers. Some multicopters are equipped withelectronic speed controllers that return the current motorspeeds to the vehicle’s main control board, though often this isnot the case (especially in lower-cost vehicles). When directmeasurement of the motor speeds is not available, a simplemethod to estimate the motor’s speed is to assume that theytrack the commanded angular speed as a first-order system (asin e.g. [28]) with time constant τm, so that
˙ωi =1
τm(ωcmd,i − ωi) (23)
From the estimated propeller speed, the propeller force can berecovered using (1).
D. Unbalance estimator
The relationship of (18) is at the heart of the identificationalgorithm. Specifically, our goal is to use the knowledge ofthe commanded motor forces fcmd,i and a sample variancefrom the accelerometer to identify the unbalances mu,iru,i. Weestimate the unbalances by using an (Np + 1)-state extendedKalman filter, where the first Np states xi relate to theunbalances as follows:
exi := ∆−10
mu,iru,imbκf,i
(24)
and the last state is related to the additive noise, with
exNp+1 := σ−1d,0
√E [d2
x] (25)
where ∆0 is an initial guess for all the unbalances, andσd,0 is an initial guess for the additive disturbance’s standarddeviation. The formulation as an exponential relationship isused to ensure that the quantities of interest remain positive(as is physically meaningful) without requiring the applicationof constraints in the Kalman filter (which may be problematic,see e.g. [29]). The estimator state vector is then given byx(k) ∈ RNp+1, with associated covariance matrix P(k) ∈R(Np+1)×(Np+1).
The estimator measurement model is
z(k) =
Np∑i=1
fi(k)2e2xi∆20 + 2e2xNp+1σ2
d,0 + νz(k) (26)
=:h(x, k) + νz(k) (27)
where νz is the measurement noise as defined in (19).1) Estimator equations: The unbalances’ dynamics, as well
as that of the estimated additive noise variance, is modelled asbeing forced by zero-mean, white, and independent noise. Inaddition to being simple to implement, this model allows theestimator to adapt to changing conditions (e.g. if a propelleris damaged mid-flight), as well as to “forget” bad information(e.g. due to poor initialization). This noise is quantified by itsscalar standard deviation. For the unbalances, this is denotedby q∆, and for the additive noise variance’s process noise byqd, so that the variance prediction equation is
Pp(k) = P(k) + diag(q2∆, . . . , q
2∆, q
2d
)∆t (28)
wherein Pp and P are the variance respectively after theprediction and measurement steps, and ∆t is the samplingperiod of the accelerometer (and thus the period of theestimator). Due to the exponential encoding of the state, thequantities q∆ and qd have units s−
12 and may be interpreted
as multiplicative uncertainties.The measurement Jacobian matrix H(k), to be used in the
filter measurement update, is given by
H(k) :=∂h
∂x
∣∣∣∣x(k)
∈ R1×(Np+1) (29)
Hi =2fi(k)2e2xi(k)∆20 for i ∈ 1, . . . , Np (30)
HNp+1 =4e2xNp+1(k)σ2d,0 (31)

so that the Kalman filter gain is computed at time k usingthe usual Extended Kalman filter equations (see e.g. [24], butrepeated here for completeness) as
K(k) = Pp(k)H(k)T(H(k)Pp(k)H(k)T +Rz(k)
)(32)
x(k+1) = x(k) +K(k) (z(k) − h(x(k), k)) (33)P(k+1) = (I −K(k)H(k))Pp(k) (34)
wherein
Rz(k) = Var [νz(k)] + r0 (35)
with Var [νz(k)] computed according to (22) and substitutingthe estimate x(k), and where r0 is an additional tuning termused to decrease the estimator’s reliance on the measurements.
2) Implementation assumptions: Implementation of theabove estimator requires that a designer specify the estimatorinitialization, P (0) and the initial beliefs for the unbalances∆0 and the accelerometer noise σd,0; and the process noisemagnitudes q∆ and qd, and the additional measurement noisevariance r0 which are effectively tuning parameters. Furtherdiscussion on choosing the tuning parameters is given in theexperimental validation section. Note that the estimator statex is always initialized to zero.
The implementation also assumes that the disturbances(external force and accelerometer noise) are zero-mean, in-dependent, identically normally distributed. The zero-meanassumption can be approximated well in practice by applyinga high-pass filter to the accelerometer output.
Notable is that the estimator does not require any knowledgeabout most vehicle physical parameters, such as its massmoment of inertia, or the location of the vehicle’s center ofmass. Moreover, an error in the belief of the vehicle massmb will simply cause a proportional error in the estimate ofthe unbalances; however the relative values of the unbalancesshould be mostly unaffected. Furthermore, no detailed knowl-edge of the disturbance forces fd is required. This impliesthat the estimator may be easily used in situations wherethese parameters are not (well) known, e.g. in uses such aspackage delivery where the payload often changes, and is hardto characterize accurately. This may be compared to model-based loss-of-effectiveness fault detection approaches, whichrely on comparison of the force command to the observeddynamics of the vehicle – in such cases the estimate will bevery sensitive to model mismatch, such as an error in the beliefof the vehicle’s center of mass causing an apparent torqueimbalance in the vehicle.
IV. SCALING EFFECTS AND INFORMATIVE TRAJECTORIES
In this section we reason about the utility of the proposedalgorithm for vehicles of different sizes and with varyingnumbers of propellers, as well as for different trajectoriesexecuted by a vehicle. We make some assumptions to deducethat the algorithm should be more effective for vehicles withfewer propellers. Moreover, the method is expected to be moreeffective for smaller vehicles, though the scaling relationshipmay be weak.
A. Informative motions
Estimating the propeller unbalances relies on the individualforces fi for the different propellers varying over time relativeto one another (in a sufficiently distinct manner), so that theeffects of the propellers’ unbalances are distinct. It is obviousthat, if all commanded forces are equal, the estimator willnot be able to distinguish between propellers – this mayoccur for a vehicle at hover in a substantially disturbance-freeenvironment, for example, or when tracking a constant velocitytrajectory. Similarly, if all forces vary in unison, such as whenperforming motions that are primarily along the vertical axis,the estimator will also be unable to distinguish the effects ofthe various unbalances.
However, a vehicle maneuvering through space, specificallyincluding horizontal motions that require force differences toproduce torques, would have more informative forces andallow for clearer identification of the unbalances. Indeed, avehicle attempting to maintain a constant position while reject-ing external disturbances will provide similar information asa vehicle maneuvering without disturbances, and thus permitidentification. A more detailed, quantitative analysis of theinformativeness of different trajectories is beyond the scopeof this work.
B. Scaling effects
1) Vehicle mass: The amplitude of the unbalance’scontribution to the accelerometer signal scales with(mu,iru,iω
2i
)/mb, from (4). Under the assumption that
the propeller’s mass scales with the mass of the vehicle, itmay be that the mass of a typical unbalance of concern alsoscales with the mass of the vehicle, so that the unbalancesignal scales like ru,iω2
i . We assume that the unbalance is atthe propeller tip, so that ru,i is simply the propeller radius,which is assumed to scale proportionally to the vehiclelength scale, and thus cubically to the vehicle mass, so thatr3u,i ∼ mb.
Two multicopter scaling laws are suggested in [30], whichmay be used to gain insight into the overall scaling effect. Thefirst is Mach scaling, which assumes that the propeller tipspeed rpωi is constant – this implies that the accelerometersignal due to the unbalance will scale like 1/rp, or propor-tionally to m
−1/3b . The second approach is Froude scaling,
which effectively assumes that the product rpω2i is constant,
so that the effect is independent of the vehicle size. Thus, inpractice, the unbalance signal will scale either independentlyof the vehicle size, or inversely proportionally to the vehiclescale.
2) Number of propellers: There are a few considerationswhen analyzing the effect of varying the number of propellerson the estimator’s efficacy. If the vehicle mass and propellersize are held constant, but the number of propellers is varied,the unbalance’s effect scales inversely proportionally to thenumber of propellers – this is due to the factor ω2
i scalinglike the individual force, which scales inversely proportionallyto the number of propellers. Therefore, a vehicle with morepropellers will experience lower vibrations due to an unbal-ance, all else being equal. Note that this is a very approximate

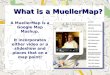
Fig. 2. The vehicles used in the experiments, with physical parameters givenin Table I.
relationship: adding more motors typically adds a substantialmass to the vehicle, with the exact relationship depending onthe vehicle structure, payload, etc.
Furthermore, the greater the number of propellers (and thuslarger estimator state-space), the larger the total uncertainty inthe system. The estimator may thus be expected to convergemore slowly for vehicles with more propellers, simply due tothe space of the uncertainty being larger.
Finally, assuming that a vehicle follows a fixed kinematictrajectory, so that the angular acceleration and proper accel-eration are fixed, the value of the individual motor forces areaffected by the mixer matrix M , as defined in (13). Notingthat the estimator relies on variations over time of the motorforces to identify unbalances, the variance of the motor forcesmay be used as an approximation of their informativeness.As the forces are linearly related to the kinematic quantitiesof total acceleration and angular acceleration (neglecting thequadratic angular velocity term in (3)), the singular valuesof the mixer matrix give some indication to the ‘gain’ ofthe variance from the kinematic quantities to the commandedmotor forces. Tedious computation shows that a vehicle withNp propellers located symmetrically about the vehicle’s centerof mass at a distance l has mixer matrix with non-zero singular
values{
mb√Np, 2Jxx√
Npl, Jzz√
Npκτ
}, where κτ is the scalar relating
the propellers’ force to the torque about their rotational axes.The terms Jxx and Jzz are the two distinct components of themass moment of inertia, corresponding to the mass momentof inertia about an axis perpendicular to the propellers’ thrustdirection for Jxx, and parallel to the propellers’ thrust directionfor Jzz This relationship suggests that, all else being equal,a vehicle with more propellers flying the same trajectory willhave more difficulty in identifying a propeller unbalance, asthe force’s individual variability will be lower. The presenceof co-axial rotors pairs does not fundamentally alter the aboveconsiderations, as long as the propellers rotate at independentspeeds.
V. EXPERIMENTAL VALIDATION
In this section the estimator is experimentally evaluated, andshown to be able to identify a damaged motor/propeller pair,and also accurately estimate the magnitude of the unbalanceon the damaged propeller. Experiments are done on threedifferent vehicle types, spanning a thirty-fold change in totalvehicle mass, and having either four or six propellers. Notably,furthermore, the smallest scale vehicle features brushed motors
TABLE IPHYSICAL PARAMETERS OF EXPERIMENTAL VEHICLES
Small Medium Largepropeller count Np 4 4 6mass mb, g 39 690 1170propeller radius rp, mm 32 100 100thrust const. κf,i, Ns2/rad2 × 10−8 4.14 764 764
Fig. 3. The damaged propellers used in the experiments, with the removedpropeller sections indicated by dashed outlines, on the right-hand side. Thedamage to the small propeller is approximately 5mg, and that to the largepropeller is approximately 40mg.
which do not have any closed-loop speed control, unlike thetwo larger vehicles having electronic speed controllers. For thesmallest vehicle the actual forces produced are likely to varymore from the truth than those of the larger vehicles.
The experiments show the estimator applied to vehicleswith nominal propellers, and with a damaged propeller. Twodifferent trajectories are used: one where the vehicle has tomove between randomly chosen setpoints with sharply varyingmotor forces; and a second trajectory where the vehicle fliesalong a horizontal circle, with comparatively smoother motorforces along the trajectory.
A. Experimental setup
Experiments are conducted in an in-door laboratory en-vironment featuring a motion capture system used for stateposition/attitude tracking of the vehicles. All vehicles areequipped with a Crazyflie 2.0 flight controller [31] (featur-ing an STM32F4 microcontroller and an MPU9250 inertialmeasurement unit). The unbalance estimator, IMU, and motorcommands are updated at 500Hz, running on this microcon-troller. The flight control stack is based on a modified PX4-stack [32], and off-board code uses ROS [33]. Note that theuse of the motion capture system should have no effect onthe evaluation of the estimator; as the estimator relies only ononboard information, the results will be the same if the vehicleflies using GPS, or is remotely piloted.
Three different vehicles are used, as shown in Fig. 2, andtheir relevant physical parameters are given in Table I. Exper-iments were done with all nominal propellers, or with a singledamaged propeller. Propellers were manually damaged bycutting off a part of the propeller tip: the damaged propellersare shown in Fig. 3.
B. Estimator implementation
The estimator was implemented with the following param-eters, identical across all three vehicle types unless otherwisenoted. The time constant with which the motors are assumedto track the commands is set to τm = 15ms. The additionalmeasurement noise was set to r0 = 100m2/s4 – a value that

was experimentally identified as providing acceptable resultsfor all platforms. The initial belief of the accelerometer noisestandard deviation was set to σd,0 = 1m s−2. The processnoise for the accelerometer noise state was chosen to beqd = 0.05√
60/√
s, and that for the unbalances as q∆ = 0.2√60/√
s.These values were chosen based on the intuition that theaccelerometer noise will change slowly (in this case, the stan-dard deviation of one minute’s drift corresponds to e0.05≈5%change), while the unbalance masses may change more quickly(corresponding to approximately 22% magnitude change perminute).
The initial state uncertainty was set to be diagonal, with thestandard deviation of the unbalance states set to 0.1, and forthe accelerometer noise state set to 0.05. The accelerometerbias was filtered out with a first-order high-pass filter withcutoff frequency set to 1Hz. The medium quadcopter and largehexacopter unbalances in the estimator state were initialized atthe equivalent of 20mg, and the small quadcopter with 2mg,at the tips of their respective propellers. Though the estimatorstate encodes the variables ∆, they are transformed for allplots and discussions to the equivalent positive unbalancemasses at the tip of the vehicle propeller through (24). Theestimator is not overly sensitive to the selection of the tuningparameters: identical estimator parameters (including tuningparameters) were used in all experiments, across the threedifferent vehicle types, with the only differences being thenumber of propellers, the propeller radii, and the initial guessfor the propeller unbalance.
C. Results
1) Small quadcopter: Three experiments are shown inFig. 4, which demonstrates the efficacy of the proposed estima-tor on a very small quadcopter with brushed motors. When thevehicle has no damaged propellers, the estimated unbalancesquickly decay to values close to zero, and remain there. In thecase of having a damaged propeller, the estimator can quicklyidentify which motor/propeller is problematic, and is able toestimate the magnitude of the unbalance to the correct order ofmagnitude. Estimator convergence is shown for two differenttrajectories: either the vehicle flies between randomly gener-ated position setpoints, or the vehicle tracks a horizontal circleat constant speed. When tracking between randomly assignedpoints, the motor forces have a much larger variance, providingmore information for the estimator to identify a damagedpropeller. For this vehicle, and this damaged propeller, theestimator however performs similarly for both trajectories,and rapidly identifies the damaged propeller with consistentestimates of the unbalance. Also visible on the graph is theeffect on the accelerometer measurements when a damagedpropeller is present, showing an approximately three-foldincrease in amplitude of the accelerometer measurements. Ineach experiment, the estimator converges after approximately15s.
2) Medium quadcopter: For the medium quadcopter, theestimator can also successfully and reliably identify a damagedpropeller, as shown in Fig. 5. The figure compares the esti-mator performance when flying two different trajectories: one
with randomly chosen position setpoints, and another wherethe vehicle flies a steady horizontal circle. In both cases, theestimator correctly identifies the faulty propeller, but notablyconverges slower than with the small quadcopter (requiring onthe order of 100s to converge). The slower convergence corre-sponds to the predictions made in Section IV, and convergencetime may be reduced by changing the tuning of the estimator(recall that all experiments used identical parameters).
The commanded motor forces vary much more when thevehicle flies between randomly assigned points, than whenflying along the circle, therefore the estimated accelerometernoise is higher for the ‘noisier’ trajectory due to the estimatedpropeller speeds being farther from the true speeds over largeforce ranges (due to e.g. motor torque limits).
3) Large hexacopter: For the large hexacopter, the esti-mator can also successfully and reliably identify a damagedpropeller, as is shown in Fig. 6. As for the small quadcoptertrajectories, three cases are shown: an undamaged vehicleflying to randomly assigned points, a damaged vehicle flyingto randomly assigned points, and a damaged vehicle flying ahorizontal circle. Again, the estimator is capable of identifyingwhether a damaged propeller is present, identifying the specificdamaged propeller, and estimating the unbalance to the correctorder of magnitude. Convergence with the hexacopter is slowerthan with the two quadcopters, and the circular trajectory isslightly less informative than the random points trajectory.
Notable is that the estimator converges to an unbalancevalue in the range 100 to 120mg on the hexacopter, and 40 to50mg on the medium quadcopter, though the same damagedpropeller was used. There are two likely causes for thisdiscrepancy. The first is that that the vehicles’ structures arenot perfectly rigid, as was assumed in the modelling section.A second cause is the non-linear nature of the estimator wherethe states are encoded through the exponential function. Dueto its convexity, a higher variance will lead to an over-estimateof the states, which can be affected by the choice of estimatortuning parameters.
4) Comparison to loss-of-effectiveness: Due to the pro-peller damage, the propeller may be expected to produce lessthrust at a given angular velocity than an undamaged propeller.We quantify this using the estimated propeller effectivenessfactors as defined in Section II-E, specifically (14).
For the small quadcopter experiments, as shown inFig. 4, we compute the propeller factors during theflight, substituting the sample average for the expecta-tion of (14), and specifically restricting the sample toa 20s interval, starting 5s after the vehicle takes off.The propeller effectiveness for the flights are below:
Flight condition η0 η1 η2 η3
No damage, random points 1.17 1.08 1.10 1.01Damage at 0, random points 1.09 1.06 1.06 1.01Damage at 0, circle 1.18 1.03 1.08 1.00Recall that a value of 1.0 indicates a nominal propeller.
The data shows that there is no strong correlation between thedamage applied to propeller 0, and the propeller factors. Thus,for this system, any loss of effectiveness that may be perceivedis completely masked by variability in the performance of thebrushed motors. This is in contrast to the presented approach,

0
2
Posi
tion
[m]
x y z
−2.5
0.0
2.5
Acc
eler
om
eter
mea
s.[m
/s2
]
ax ay
0.0
0.1
Cm
dfo
rce
ran
ge
[N]
0
2
Unb
ala
nce
(est
)[m
g]
m0 m1 m2 m3
0 10 20 30
Time [s]
0
1
Acc
eler
om
eter
nois
est
d.
dev
.[m
/s2
]
0 10 20 30
Time [s]
0 10 20 30
Time [s]
Fig. 4. Three experiments done with the small quadcopter. The left-hand column shows a vehicle with no damaged propellers flying between randomlyassigned positions, the middle column shows the same trajectory but with a damaged propeller located at motor 0. The right-hand column also has a damagedpropeller at motor 0, but the vehicle instead flies a circular horizontal trajectory of radius 1m with velocity 1m s−1.
0.0
2.5
Cm
dfo
rce
ran
ge
[N]
0
25
50
Unb
ala
nce
(est
)[m
g]
m0 m1
m2 m3
0 50 100 150
Time [s]
0
1
Acc
.n
ois
est
d.
dev
.[m
/s2
]
0 100 200 300 400
Time [s]
Fig. 5. Performance of the estimator on the medium quadcopter, with adamaged propeller on motor 0. The left-hand column shows the vehicle flyinga trajectory between randomly assigned position setpoints (and thus havingrapidly varying motor forces), and the right-hand column of graphs showsthe vehicle flying a horizontal circular trajectory of radius 1m at a speedof 1m s−1. The estimator correctly identifies the damaged propeller, and theestimate converges to the same value in both cases.
which was able to rapidly and accurately identify the damagedpropeller.
VI. CONCLUSION
We have presented a propeller fault detector that uses ac-celerometer measurements to recursively estimate unbalancespresent in a multicopter’s rotors. The intuition behind theestimator is to correlate changes in the accelerometer noisepower to changes in the individual propeller speeds or motorforce commands, allowing the estimator to identify a damagedpropeller, and the magnitude of the damage. The estimatoris shown to work reliably on three diverse platforms, withsubstantially different total masses, and different actuators(brushed/brushless motors).
The algorithm may be useful to small, low cost vehicles,where adding complex additional sensors for fault detectionis prohibitively expensive or heavy. For larger systems, whichmay already include additional sensors, the algorithm providesan inexpensive, independent method for identifying potentialdrive-train issues.
To use the algorithm in a system, a designer would needto extend what is presented in order to make decisions basedon the estimates; one example would be to define a thresholdfor tolerable propeller unbalances – if a vehicle exceeds thesethresholds, a maintenance event is triggered. Alternatively, a

0
2
Posi
tion
[m]
x y z
−2.5
0.0
2.5
Acc
eler
om
eter
mea
s.[m
/s2
]
ax ay
0
2
Cm
dfo
rce
ran
ge
[N]
0
100
Unb
ala
nce
(est
)[m
g]
m0
m1
m2
m3
m4
m5
0 20 40 60 80 100
Time [s]
1
2
Acc
eler
om
eter
nois
est
d.
dev
.[m
/s2
]
0 50 100 150 200
Time [s]
0 50 100 150 200 250 300
Time [s]
Fig. 6. Performance of the estimator on the large hexacopter, with a damaged propeller on motor 0. The columns, from left to right, show the vehicleflying a trajectory between randomly generated points without propeller damage, flying the same trajectory with a damaged propeller at motor 0, and flyinga circular trajectory with a damaged propeller at motor 0. The third row plots the range of the forces commanded, i.e. the minimum and maximum motorforce commanded at each time instant.
health monitoring system may look at the change in unbal-ances, rather than their absolute value, to flag a maintenanceevent, or trigger an emergency landing. Because the estimatoris able to identify the specific damaged motor/propeller pair,maintenance may be substantially simplified (no expert visualinspection of all propellers required, for example).
The algorithm may also be readily adapted to other aerialsystems with propellers, such as tailsitter systems (e.g. [34]),or other hybrid designs (e.g. [35]).
ACKNOWLEDGEMENTS
This work was supported by the Department of MechanicalEngineering, UC Berkeley, and the Finnish Cultural Founda-tion. The experimental test bed at the HiPeRLab is the resultof contributions of many people, a full list of which can befound at hiperlab.berkeley.edu/members/.
REFERENCES
[1] R. Mahony, V. Kumar, and P. Corke, “Aerial vehicles: Mod-eling, estimation, and control of quadrotor,” IEEE Robotics &Automation Magazine, vol. 19, no. 3, pp. 20–32, 2012.
[2] J. I. Giribet, R. S. Sanchez-Pena, and A. S. Ghersin, “Analysisand design of a tilted rotor hexacopter for fault tolerance,”IEEE Transactions on Aerospace and Electronic Systems,vol. 52, no. 4, pp. 1555–1567, 2016.
[3] W. Zhang, M. W. Mueller, and R. D’Andrea, “A controllableflying vehicle with a single moving part,” in IEEE Interna-tional Conference on Robotics and Automation (ICRA), IEEE,2016, pp. 3275–3281.
[4] M. Piccoli and M. Yim, “Piccolissimo: The smallest microaerial vehicle,” in IEEE International Conference on Roboticsand Automation (ICRA), IEEE, 2017, pp. 3328–3333.
[5] A. Freddi, S. Longhi, and A. Monteriu, “A model-based faultdiagnosis system for a mini-quadrotor,” in 7th workshop onAdvanced Control and Diagnosis, 2009, pp. 19–20.
[6] C. T. Raabe and S. Suzuki, “Adaptive, failure-tolerant con-trol for hexacopters,” in AIAA Infotech@ Aerospace (I@ A)Conference, 2013, pp. 1–8.
[7] M. Saied, B. Lussier, I. Fantoni, C. Francis, H. Shraim,and G. Sanahuja, “Fault diagnosis and fault-tolerant controlstrategy for rotor failure in an octorotor,” in IEEE InternationalConference on Robotics and Automation (ICRA), IEEE, 2015,pp. 5266–5271.
[8] R. C. Avram, X. Zhang, and J. Muse, “Quadrotor actuatorfault diagnosis and accommodation using nonlinear adaptiveestimators,” IEEE Transactions on Control Systems Technol-ogy, vol. 25, no. 6, pp. 2219–2226, 2017.
[9] A. Hasan and T. A. Johansen, “Model-based actuator faultdiagnosis in multirotor UAVs,” in International Conferenceon Unmanned Aircraft Systems, IEEE, 2018, pp. 1017–1024.
[10] J. Bazin, T. Fields, and A. J. Smith, “Feasibility of in-flightquadrotor individual motor thrust measurements,” in AIAAAtmospheric Flight Mechanics Conference, 2016, p. 1760.
[11] M. Saied, B. Lussier, I. Fantoni, H. Shraim, and C. Francis,“Passive fault-tolerant control of an octorotor using super-

twisting algorithm: Theory and experiments,” in Control andFault-Tolerant Systems (SysTol), IEEE, 2016, pp. 361–366.
[12] R. C. Avram, X. Zhang, and J. Muse, “Nonlinear adaptivefault-tolerant quadrotor altitude and attitude tracking with mul-tiple actuator faults,” IEEE Transactions on Control SystemsTechnology, vol. 26, no. 2, pp. 701–707, 2018.
[13] A. Chamseddine, Y. Zhang, C. A. Rabbath, C. Join, andD. Theilliol, “Flatness-based trajectory planning/replanning fora quadrotor unmanned aerial vehicle,” IEEE Transactions onAerospace and Electronic Systems, vol. 48, no. 4, pp. 2832–2848, 2012.
[14] D. Scaramuzza, M. Achtelik, L. Doitsidis, F. Friedrich, E.Kosmatopoulos, A. Martinelli, M. Achtelik, M. Chli, S.Chatzichristofis, L. Kneip, D. Gurdan, L. Heng, G. H. Lee,S. Lynen, M. Pollefeys, A. Renzaglia, R. Siegwart, J. Stumpf,P. Tanskanen, C. Troiani, S. Weiss, and L. Meier, “Vision-controlled micro flying robots: From system design to au-tonomous navigation and mapping in GPS-denied environ-ments,” IEEE Robotics Automation Magazine, vol. 21, no. 3,pp. 26–40, Sep. 2014.
[15] A. Marks, J. F. Whidborne, and I. Yamamoto, “Control al-location for fault tolerant control of a VTOL octorotor,” inUKACC International Conference on Control, IEEE, 2012,pp. 357–362.
[16] M. W. Mueller and R. D’Andrea, “Relaxed hover solutions formulticopters: Application to algorithmic redundancy and novelvehicles,” The International Journal of Robotics Research,vol. 35, no. 8, pp. 873–889, 2016.
[17] A. Nemati, R. Kumar, and M. Kumar, “Stabilizing and controlof tilting-rotor quadcopter in case of a propeller failure,” inASME 2016 Dynamic Systems and Control Conference, Amer-ican Society of Mechanical Engineers, 2016, V001T05A00.
[18] P. Freeman, R. Pandita, N. Srivastava, and G. J. Balas, “Model-based and data-driven fault detection performance for a smallUAV,” IEEE/ASME Transactions on Mechatronics, vol. 18,no. 4, pp. 1300–1309, 2013.
[19] P. Henriquez, J. B. Alonso, M. A. Ferrer, and C. M. Travieso,“Review of automatic fault diagnosis systems using audio andvibration signals,” IEEE Transactions on Systems, Man, andCybernetics: Systems, vol. 44, no. 5, pp. 642–652, 2013.
[20] M. Lebold, K. McClintic, R. Campbell, C. Byington, and K.Maynard, “Review of vibration analysis methods for gearboxdiagnostics and prognostics,” in Proceedings of the 54th meet-ing of the society for machinery failure prevention technology,2000, pp. 623–634.
[21] A. S. Sait and Y. I. Sharaf-Eldeen, “A review of gearboxcondition monitoring based on vibration analysis techniquesdiagnostics and prognostics,” in Rotating Machinery, Struc-tural Health Monitoring, Shock and Vibration, Volume 5,Springer, 2011, pp. 307–324.
[22] P. D. Samuel and D. J. Pines, “A review of vibration-basedtechniques for helicopter transmission diagnostics,” Journal ofsound and vibration, vol. 282, no. 1-2, pp. 475–508, 2005.
[23] M. Yang and V. Makis, “ARX model-based gearbox faultdetection and localization under varying load conditions,”Journal of Sound and Vibration, vol. 329, no. 24, pp. 5209–5221, 2010.
[24] D. Simon, Optimal state estimation: Kalman, H infinity, andnonlinear approaches. John Wiley & Sons, 2006.
[25] B. Ghalamchi and M. W. Mueller, “Vibration based propellerfault diagnosis for multicopters,” in International Conferenceon Unmanned Aerial Systems, IEEE, 2018, pp. 1041–1047.
[26] G. Ducard and M.-D. Hua, “Discussion and practical aspectson control allocation for a multi-rotor helicopter,” in Con-ference on Unmanned Aerial Vehicle in Geomatics, 2011,pp. 1–6.
[27] S. Lupashin, M. Hehn, M. W. Mueller, A. P. Schoellig, M.Sherback, and R. D’Andrea, “A platform for aerial robotics re-
search and demonstration: The flying machine arena,” Mecha-tronics, vol. 24, no. 1, pp. 41–54, 2014.
[28] M. W. Mueller and R. D’Andrea, “Stability and control of aquadrocopter despite the complete loss of one, two, or threepropellers,” in IEEE International Conference on Robotics andAutomation (ICRA), IEEE, 2014, pp. 45–52.
[29] S. J. Julier and J. J. LaViola Jr, “On Kalman filtering withnonlinear equality constraints,” IEEE Transactions on SignalProcessing, vol. 55, no. 6, pp. 2774–2784, 2007.
[30] A. Kushleyev, D. Mellinger, C. Powers, and V. Kumar,“Towards a swarm of agile micro quadrotors,” AutonomousRobots, vol. 35, no. 4, pp. 287–300, 2013.
[31] Bitcraze, Crazyflie 2.0, www. bitcraze . io / crazyflie - 2/, Ac-cessed: 2018-10-03.
[32] L. Meier, P. Tanskanen, L. Heng, G. Lee, F. Fraundorfer, andM. Pollefeys, “Pixhawk: A micro aerial vehicle design forautonomous flight using onboard computer vision,” English,Autonomous Robots, vol. 33, no. 1-2, pp. 21–39, 2012.
[33] M. Quigley, K. Conley, B. P. Gerkey, J. Faust, T. Foote,J. Leibs, R. Wheeler, and A. Y. Ng, “ROS: An open-sourcerobot operating system,” in ICRA Workshop on Open SourceSoftware, 2009.
[34] Y. Ke, K. Wang, and B. M. Chen, “Design and implementa-tion of a hybrid UAV with model-based flight capabilities,”IEEE/ASME Transactions on Mechatronics, 2018.
[35] J. Apkarian, “Attitude control of pitch-decoupled VTOL fixedwing tiltrotor,” in International Conference on UnmannedAircraft Systems, IEEE, 2018, pp. 195–201.
Behnam Ghalamchi is lecturer at California Poly-technic State University - San Luis Obispo . Heobtained his doctoral degree from Lappeenranta Uni-versity of Technology in 2014. From 2017-2019he was post doctoral researcher (funded by FinnishCultural Foundation) at HiPeRLab, UC Berkeley,CA.
Zheng Jia obtained his bachelors degree in Elec-tronic and Information Engineering from The HongKong Polytechnic University in 2013 and a mastersin Robotics, Systems and Control from ETH Zrichin 2017 in 2017. He joined the HiPeR Lab of UCBerkeley as a short-term visiting scholar staring fromJune 2018 to December 2018. He is now a visitingscholar at Intelligent Control Systems of Max PlanckInstitute for Intelligent Systems. His main researchinterest is distributed control and coordination ofmulti-robot systems.
Mark W. Mueller is an assistant professor in theMechanical Engineering Department at the Uni-veristy of California, Berkeley. He received a bache-lors degree from the University of Pretoria, a mastersfrom ETH Zurich in 2011, and a DrSc from ETHZurich in 2015, all in Mechanical Engineering. Cur-rent research focuses on control and design of aerialrobots for challenging environments.



![Towards Hierarchical Scheduling in VxWorksrbril/publications/[Behnam et al 08].pdf · Towards Hierarchical Scheduling in VxWorks ∗ Moris Behnam†, Thomas Nolte, Insik Shin, Mikael](https://img.pdfslide.us/doc/110x75/5e6fa360fb4f7f5dbc46c773/towards-hierarchical-scheduling-in-rbrilpublicationsbehnam-et-al-08pdf-towards.jpg)