Embed Size (px)
Citation preview

March 2017
Masterclass localization

AUTONOMOUS VEHICLES POWERFUL DRIVER
NAVIGATION LOCALIZATION + MAPS
WHO NEEDS LOCALIZATION?
People
Automated guided vehicles
Trains
Boats
Drones
Cars
Robots

LOCALIZATION ACCURACY
m dmcm
LOCALIZATION
Localization
Absolute
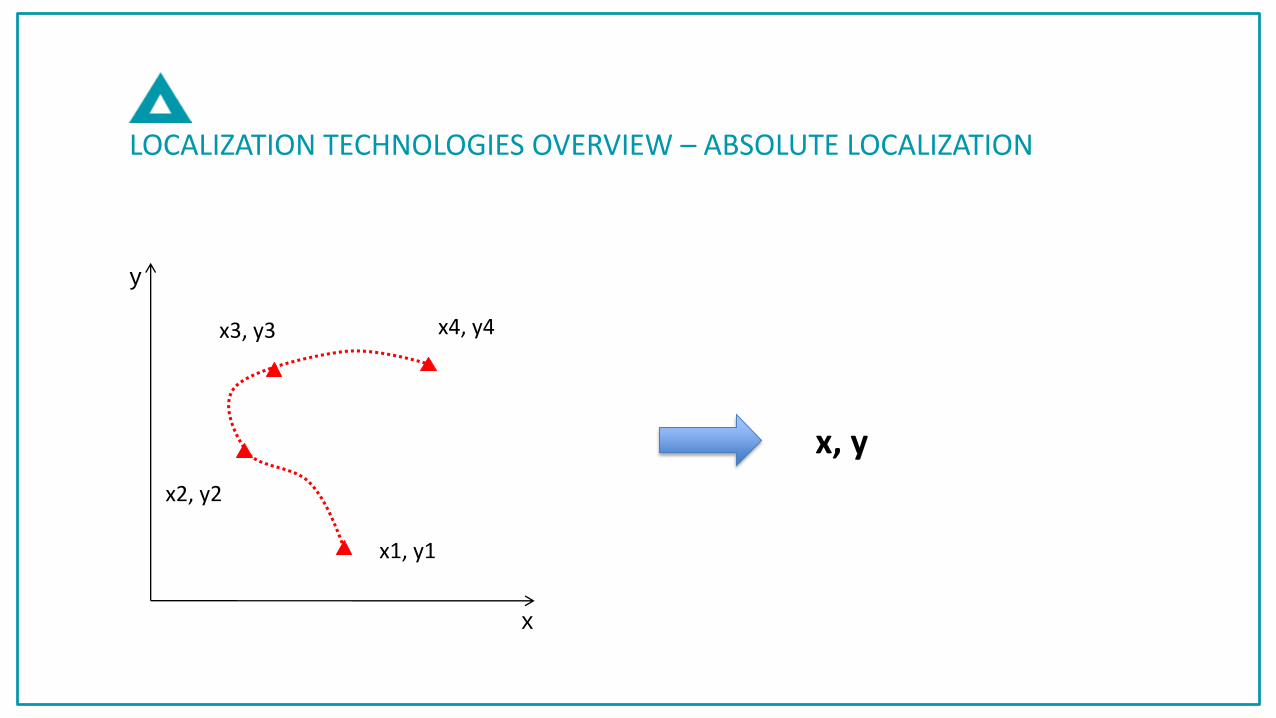
LOCALIZATION TECHNOLOGIES OVERVIEW – ABSOLUTE LOCALIZATION
x, y
y
x
x1, y1
x2, y2
x3, y3 x4, y4
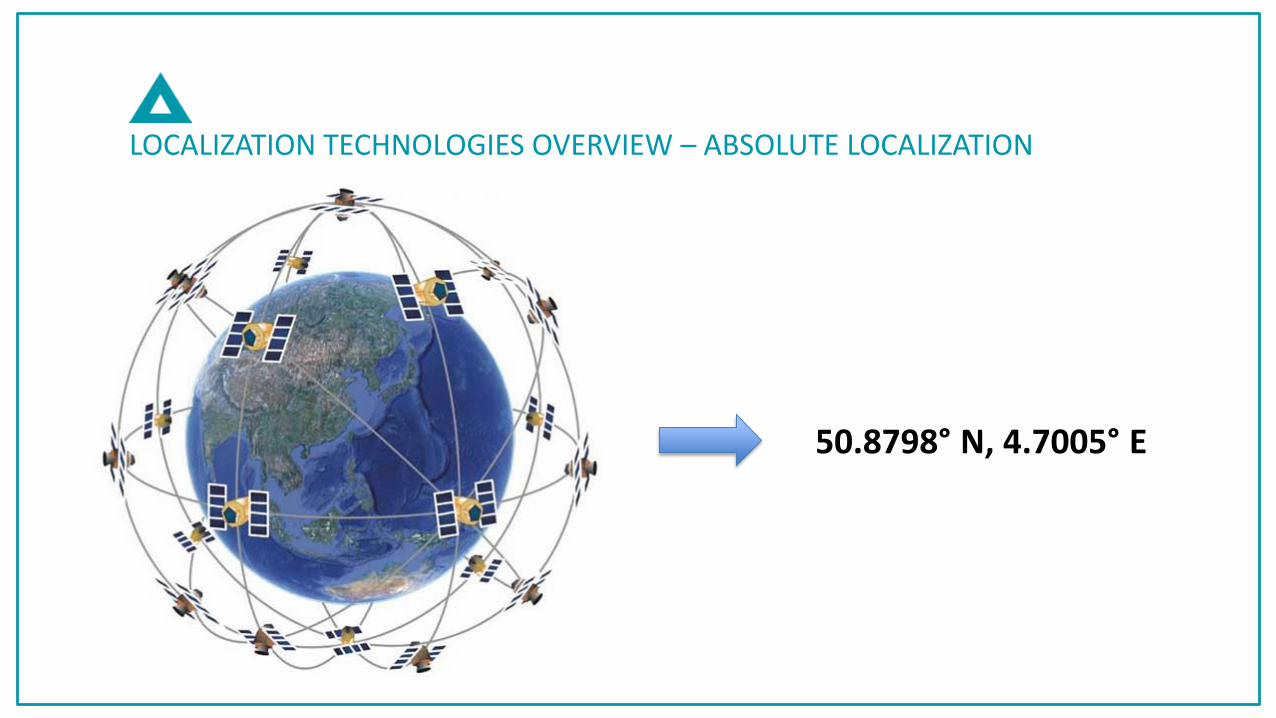
LOCALIZATION TECHNOLOGIES OVERVIEW – ABSOLUTE LOCALIZATION
50.8798° N, 4.7005° E

ABSOLUTE LOCALIZATION TECHNOLOGIES
GPS
Decawave
Visual beacons or landmarks
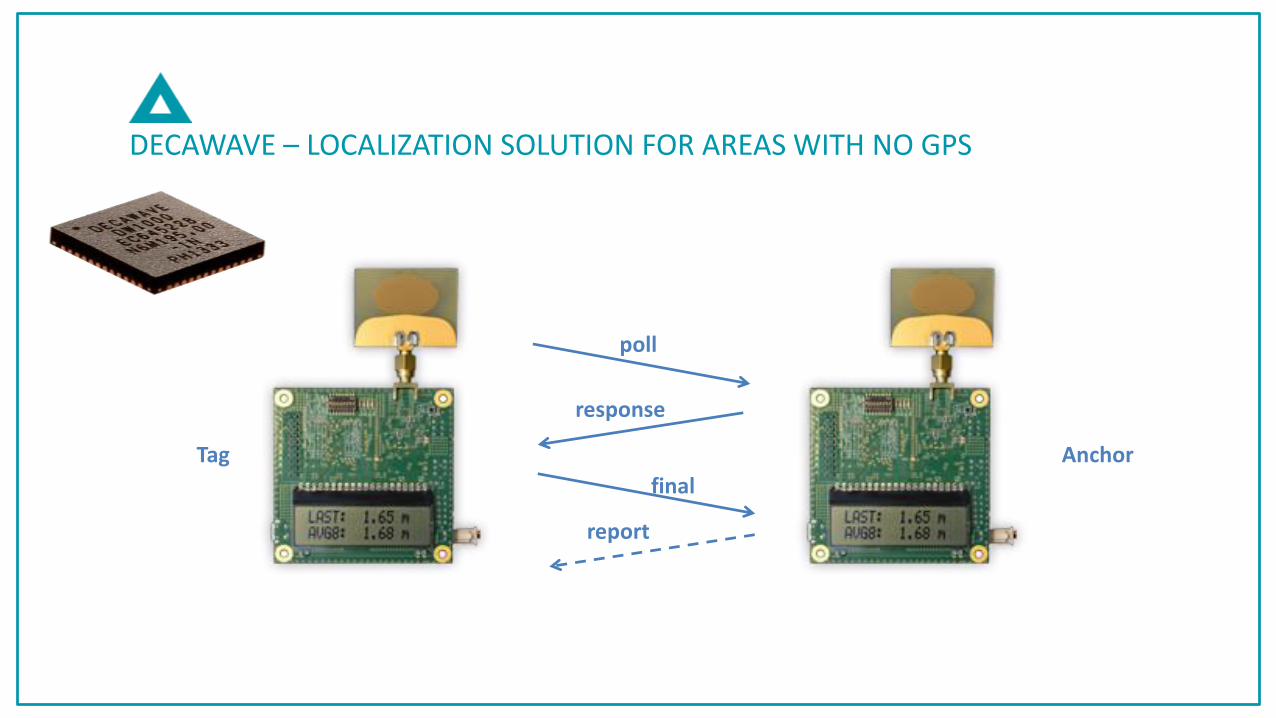
DECAWAVE – LOCALIZATION SOLUTION FOR AREAS WITH NO GPS
Tag Anchor
poll
response
final
report
Master
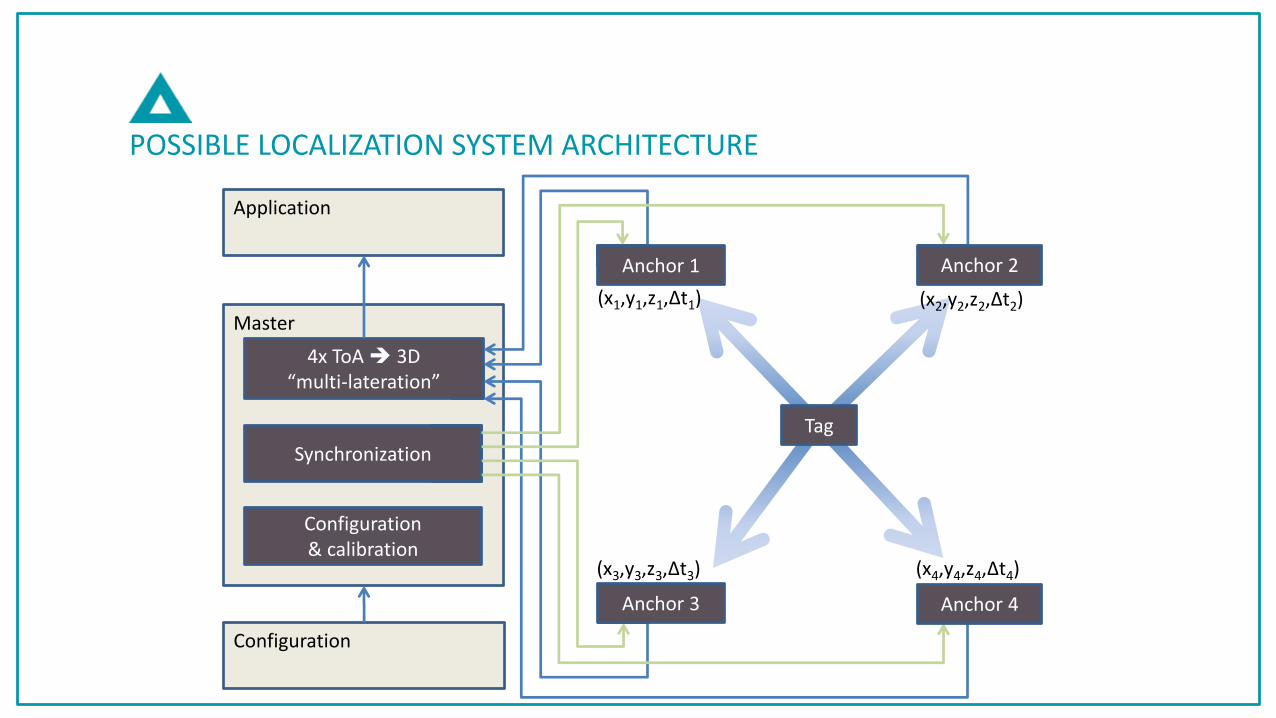
POSSIBLE LOCALIZATION SYSTEM ARCHITECTURE
4x ToA 3D“multi-lateration”
Synchronization
Configuration& calibration
Tag
Application
(x1,y1,z1,Δt1) (x2,y2,z2,Δt2)
(x3,y3,z3,Δt3) (x4,y4,z4,Δt4)
Anchor 2Anchor 1
Anchor 4Anchor 3
Configuration

Criteria Measurements
Update rate Ranging 60 Hz
3D localization 15 Hz
Ranging error Max systematic Δμ 11.8 cm
Max std dev σ 2.0 cm
2D error Max systematic Δμ 21.2 cm
Max std dev σ 6.3 cm
DECAWAVE PERFORMANCE EVALUATION
HIGH ACCURACY, HIGH AVAILABILITY LOCALIZATION SYSTEMS EXIST! BUT…
HIGH ACCURACY, HIGH AVAILABILITY LOCALIZATION SYSTEMS ARE A COMBINATION OF:
High accuracy GPS
High accuracy inertial navigation systems
IMPRESSIVE PERFORMANCE:
Global localization accuracy: 0.02m ☺
Update rate: 200Hz ☺
High availability in absence of satellite signal ☺
IMPRESSIVE PRICE: 20-30KEUR
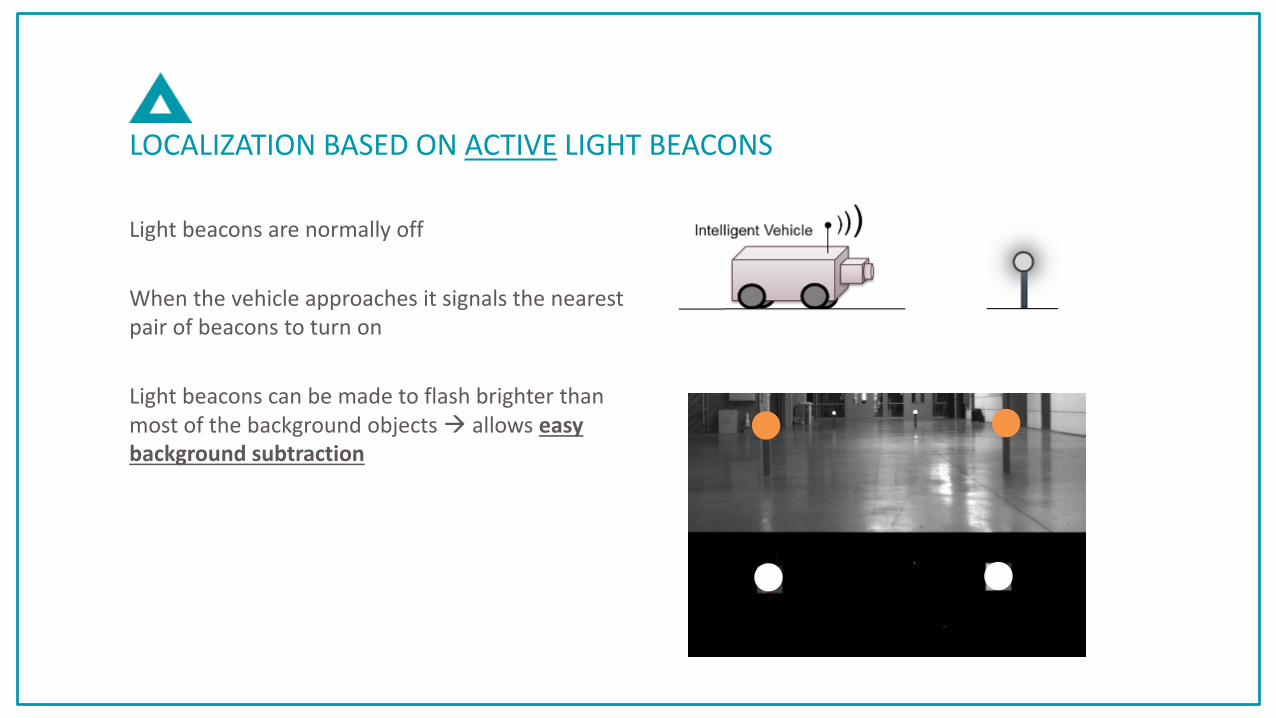
LOCALIZATION BASED ON ACTIVE LIGHT BEACONS
Light beacons are normally off
When the vehicle approaches it signals the nearest pair of beacons to turn on
Light beacons can be made to flash brighter than most of the background objects allows easy background subtraction
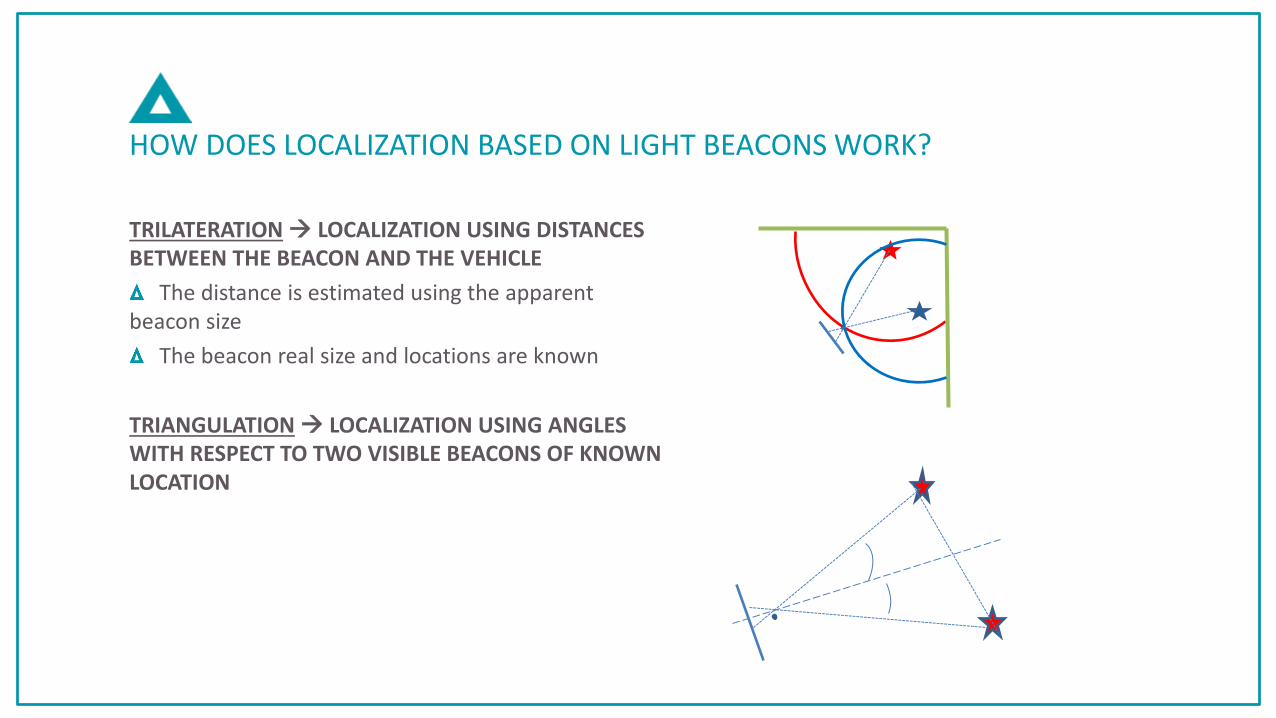
HOW DOES LOCALIZATION BASED ON LIGHT BEACONS WORK?
TRILATERATION LOCALIZATION USING DISTANCES BETWEEN THE BEACON AND THE VEHICLE
The distance is estimated using the apparent beacon size
The beacon real size and locations are known
TRIANGULATION LOCALIZATION USING ANGLES WITH RESPECT TO TWO VISIBLE BEACONS OF KNOWN LOCATION
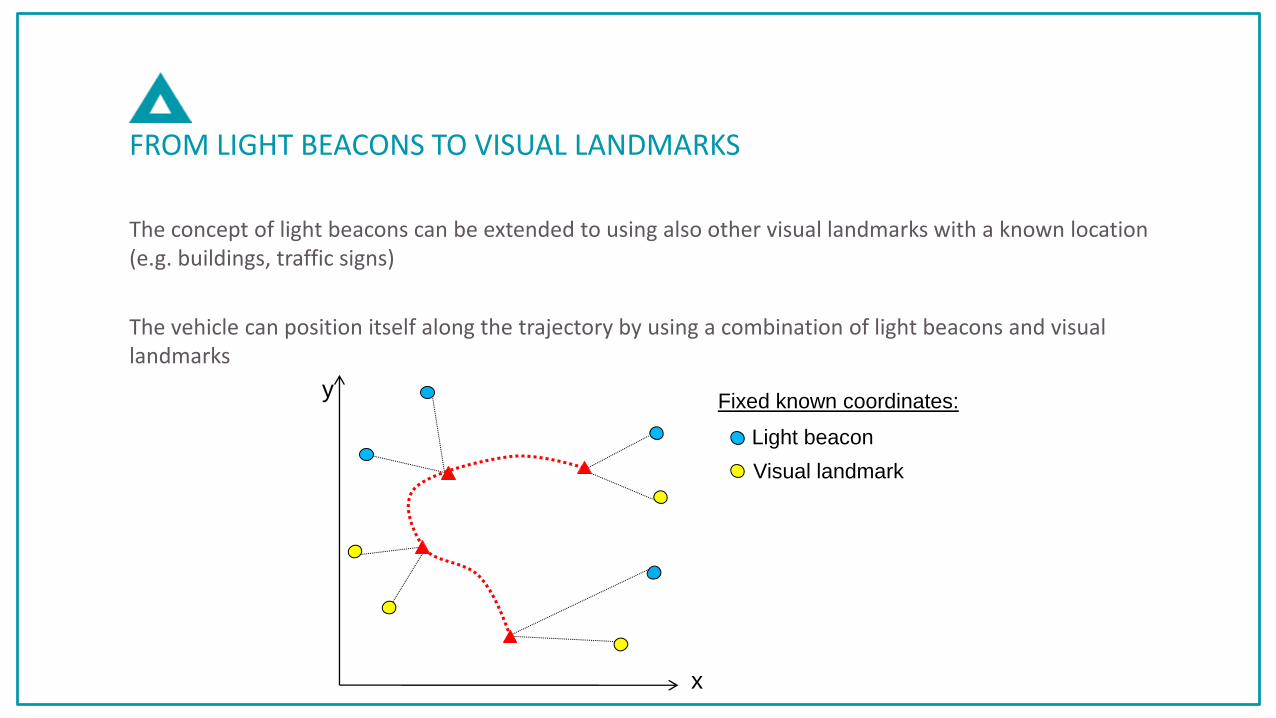
FROM LIGHT BEACONS TO VISUAL LANDMARKS
The concept of light beacons can be extended to using also other visual landmarks with a known location (e.g. buildings, traffic signs)
The vehicle can position itself along the trajectory by using a combination of light beacons and visual landmarks
Fixed known coordinates:
Light beacon
Visual landmark
y
x
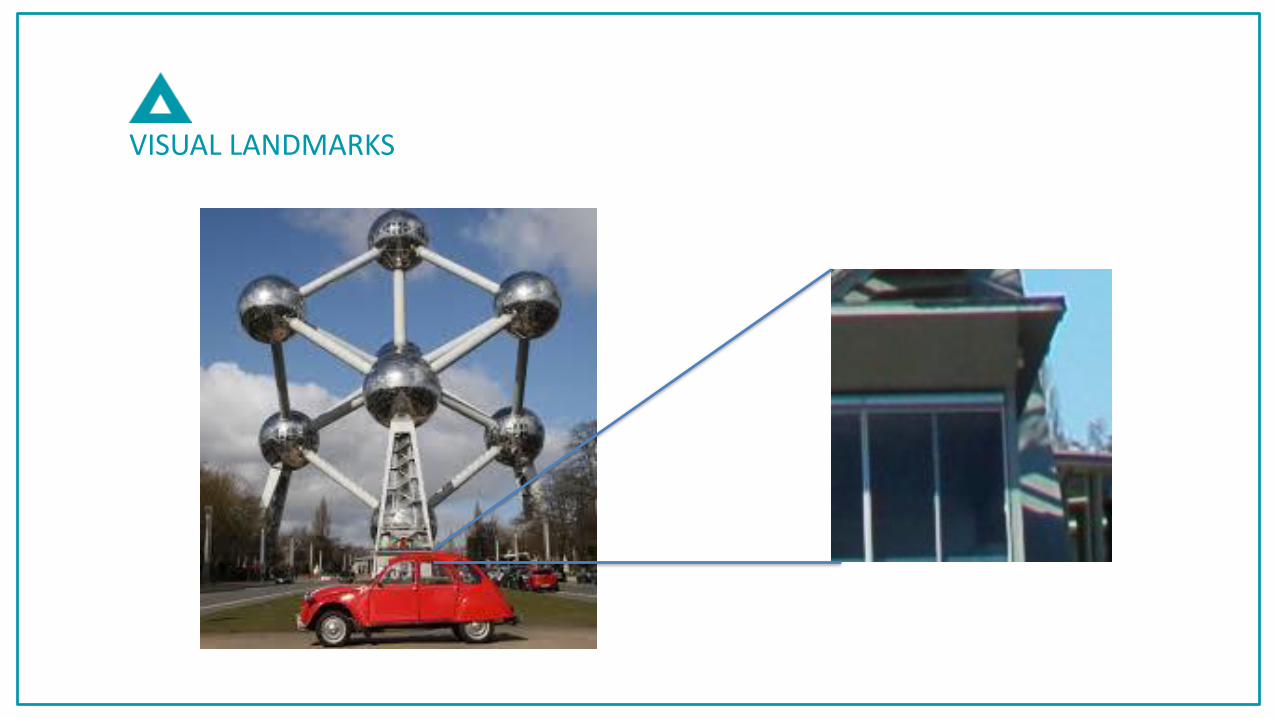
VISUAL LANDMARKS
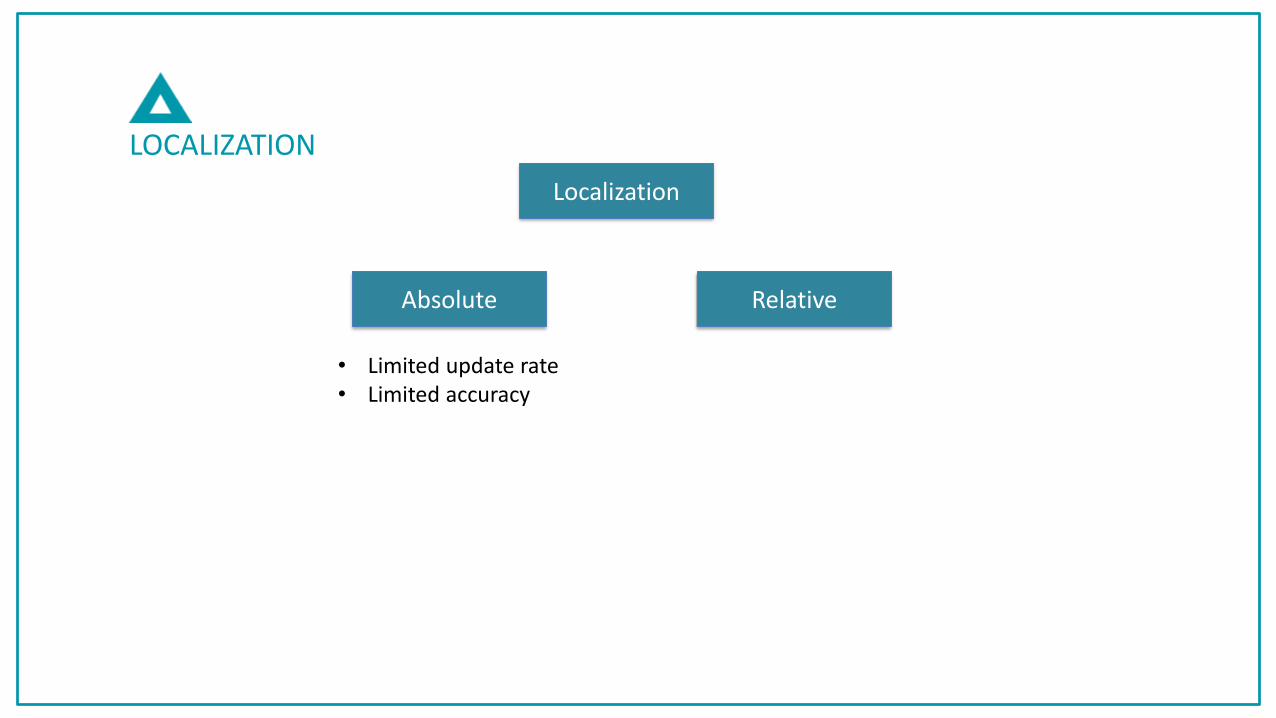
LOCALIZATION
Localization
Absolute Relative
• Limited update rate• Limited accuracy

LOCALIZATION TECHNOLOGIES OVERVIEW – RELATIVE LOCALIZATION
∆x, ∆y
Initial point
∆x1, ∆y1
∆x2, ∆y2 ∆x3, ∆y3
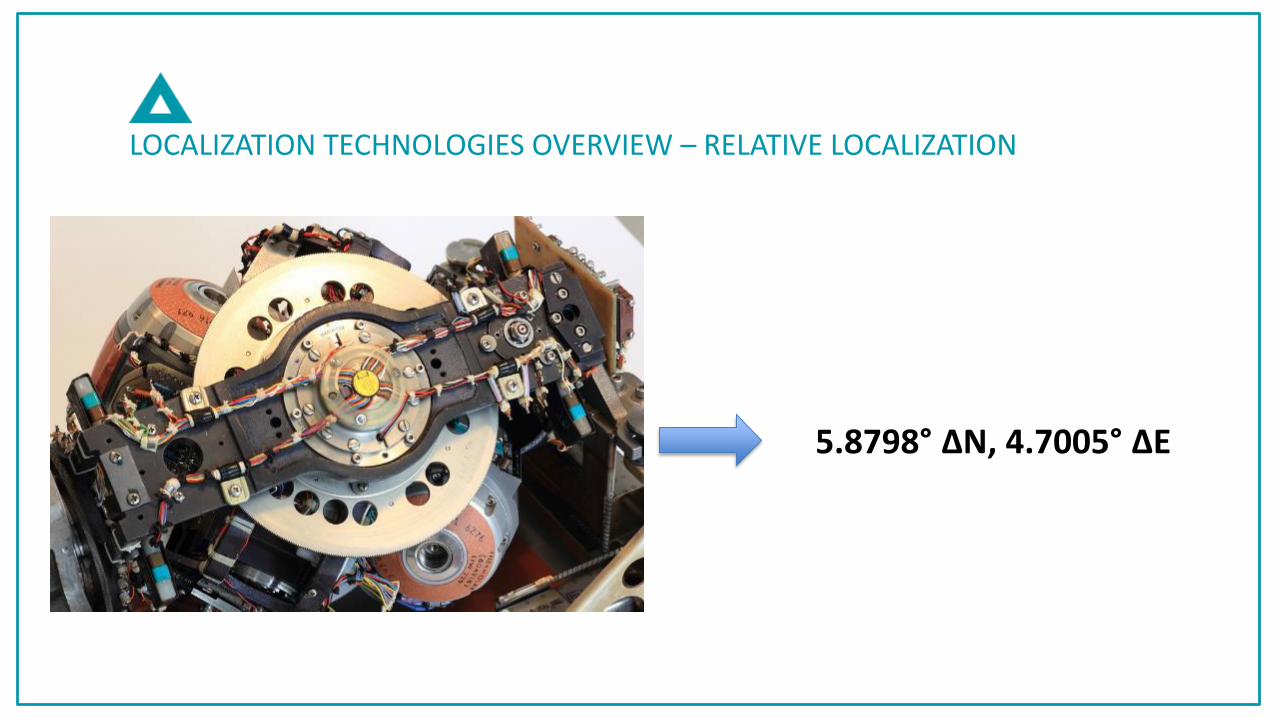
LOCALIZATION TECHNOLOGIES OVERVIEW – RELATIVE LOCALIZATION
5.8798° ∆N, 4.7005° ∆E

RELATIVE LOCALIZATION TECHNOLOGIES
Inertial navigation
Radar
Lidar
Laser scanners
Sonar
Visual odometry
Ground facing camera
INERTIAL NAVIGATION
Acceleration Speed Distance
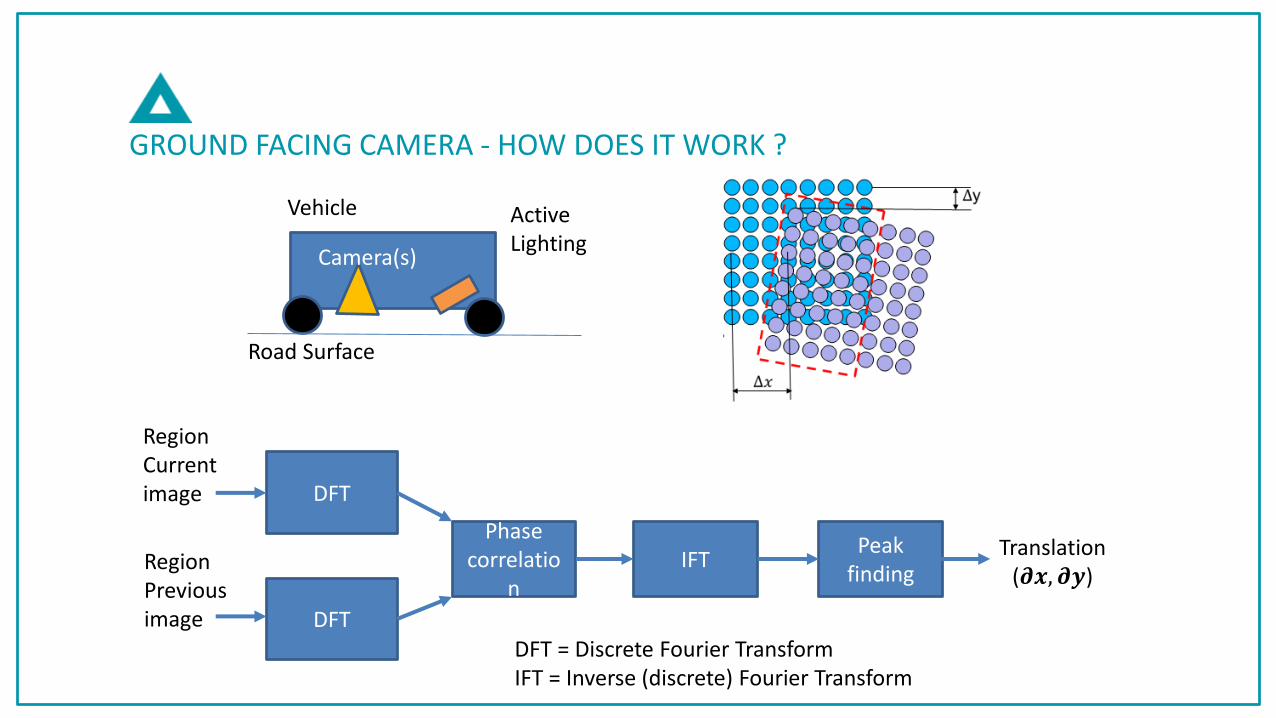
RegionCurrentimage
RegionPreviousimage
DFT
DFT
Phase correlatio
nIFT
Peak finding
DFT = Discrete Fourier TransformIFT = Inverse (discrete) Fourier Transform
Vehicle
Camera(s)
Active Lighting
Road Surface
Translation (𝝏𝒙, 𝝏𝒚)
GROUND FACING CAMERA - HOW DOES IT WORK ?
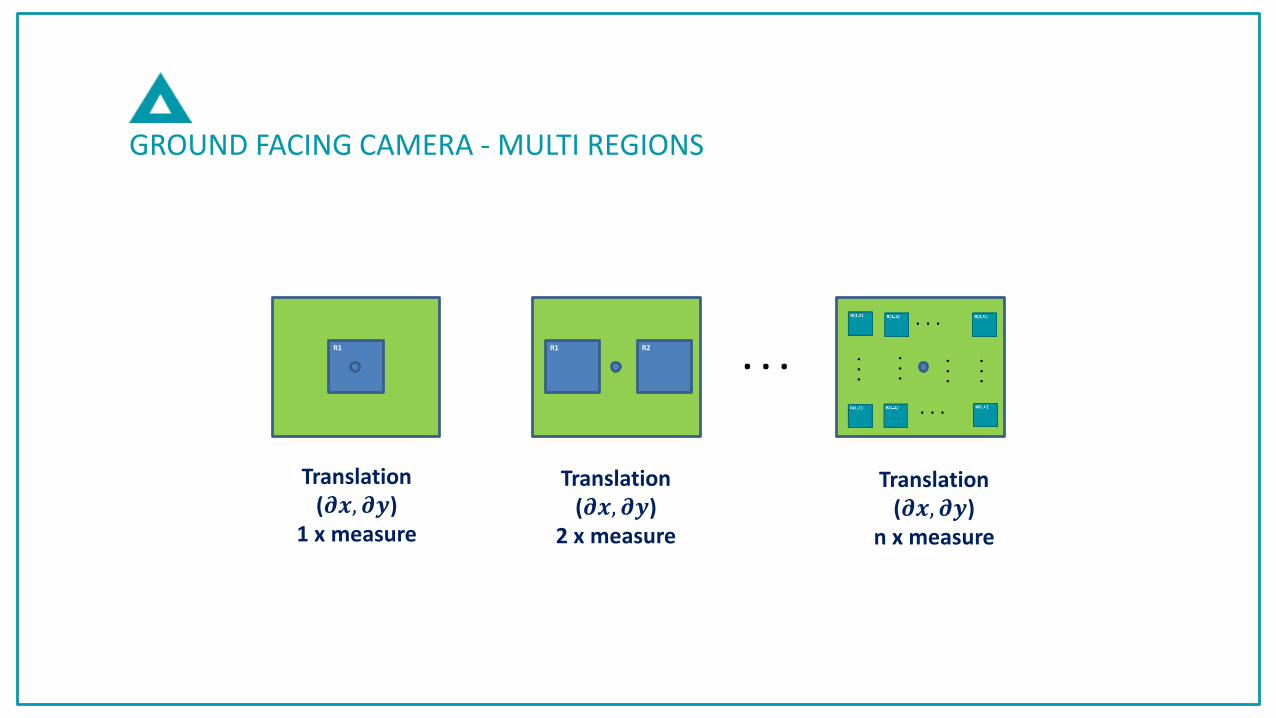
Translation (𝝏𝒙, 𝝏𝒚)
1 x measure
Translation (𝝏𝒙, 𝝏𝒚)
2 x measure
Translation (𝝏𝒙, 𝝏𝒚)
n x measure
. . . . . .
. . .
. . .
. . .
. . .
R1 R1 R2
R(1,C)
. . .
GROUND FACING CAMERA - MULTI REGIONS
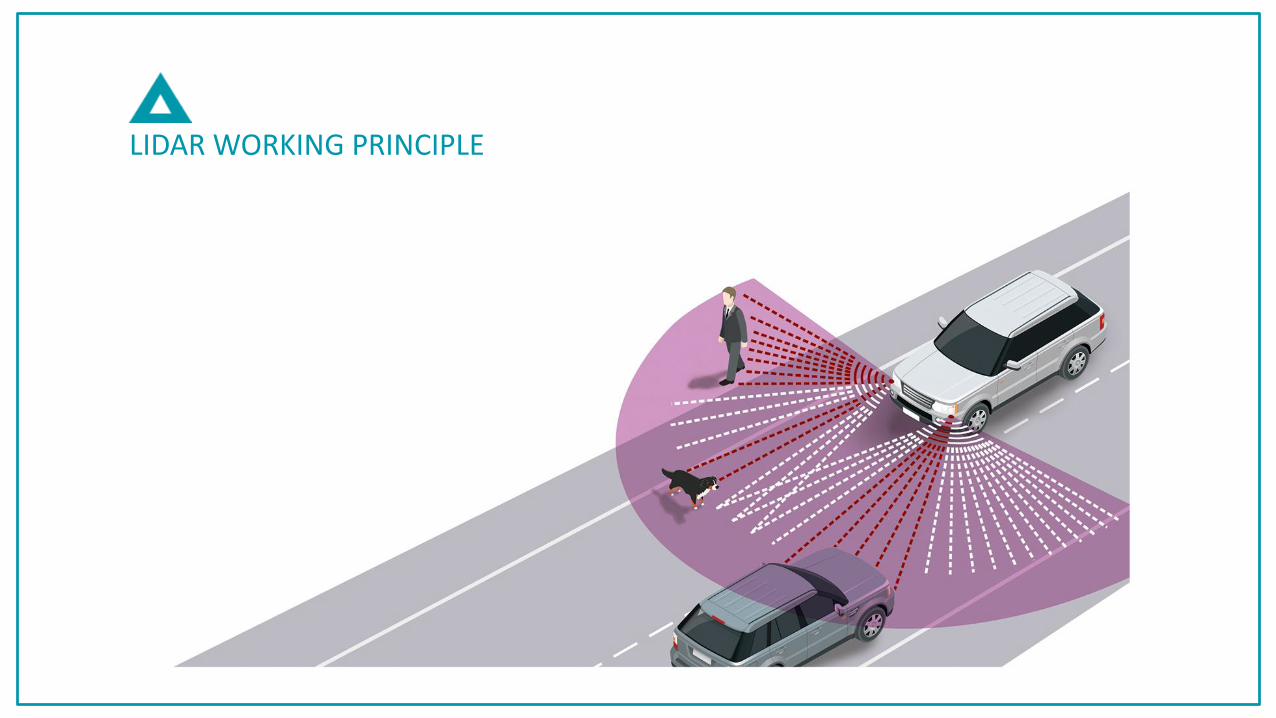
LIDAR WORKING PRINCIPLE
RADAR WORKING PRINCIPLE
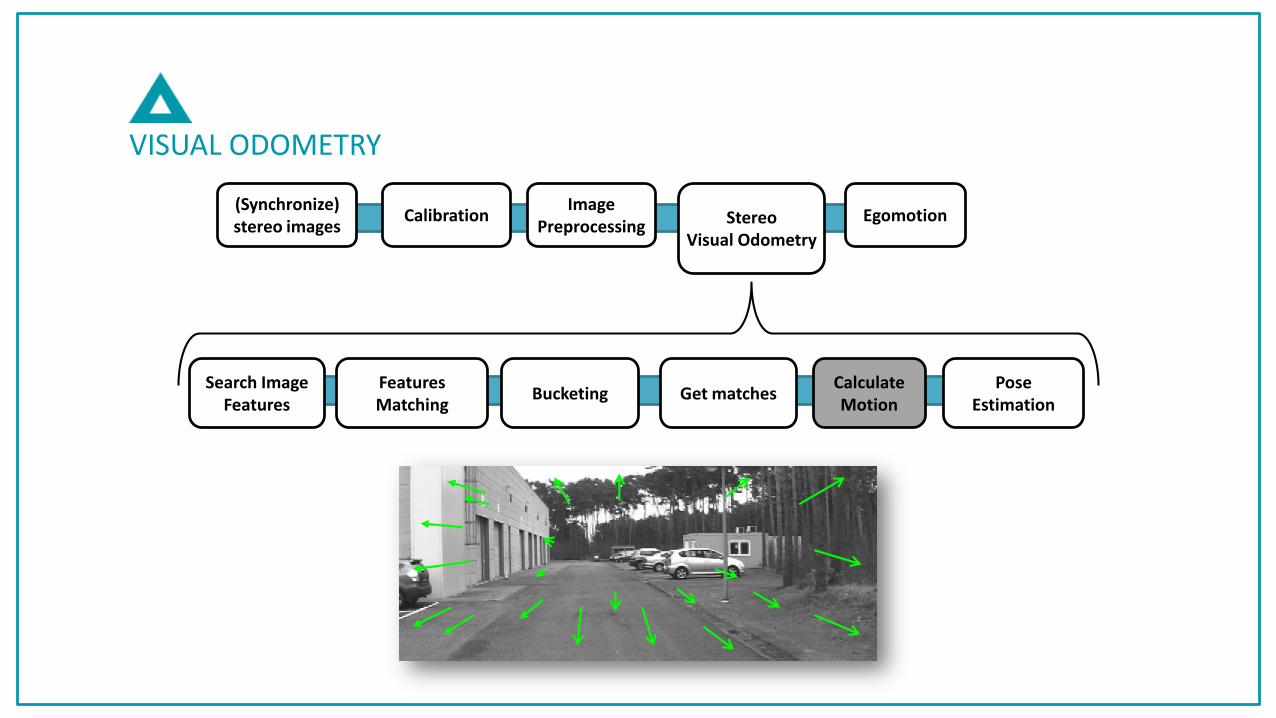
Calibration Egomotion
Search ImageFeatures
Features Matching
BucketingCalculate Motion
Get matchesPose
Estimation
StereoVisual Odometry
VISUAL ODOMETRY
(Synchronize) stereo images
Image Preprocessing
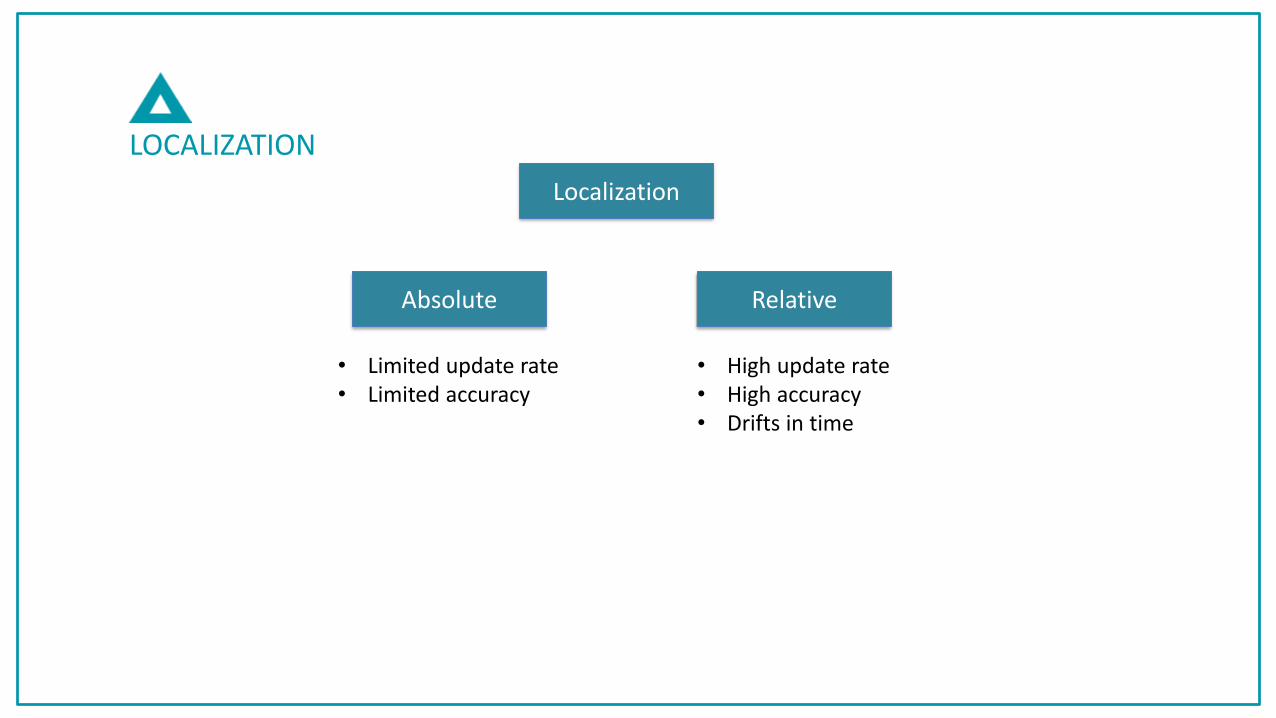
LOCALIZATION
Localization
Absolute Relative
• Limited update rate• Limited accuracy
• High update rate• High accuracy• Drifts in time
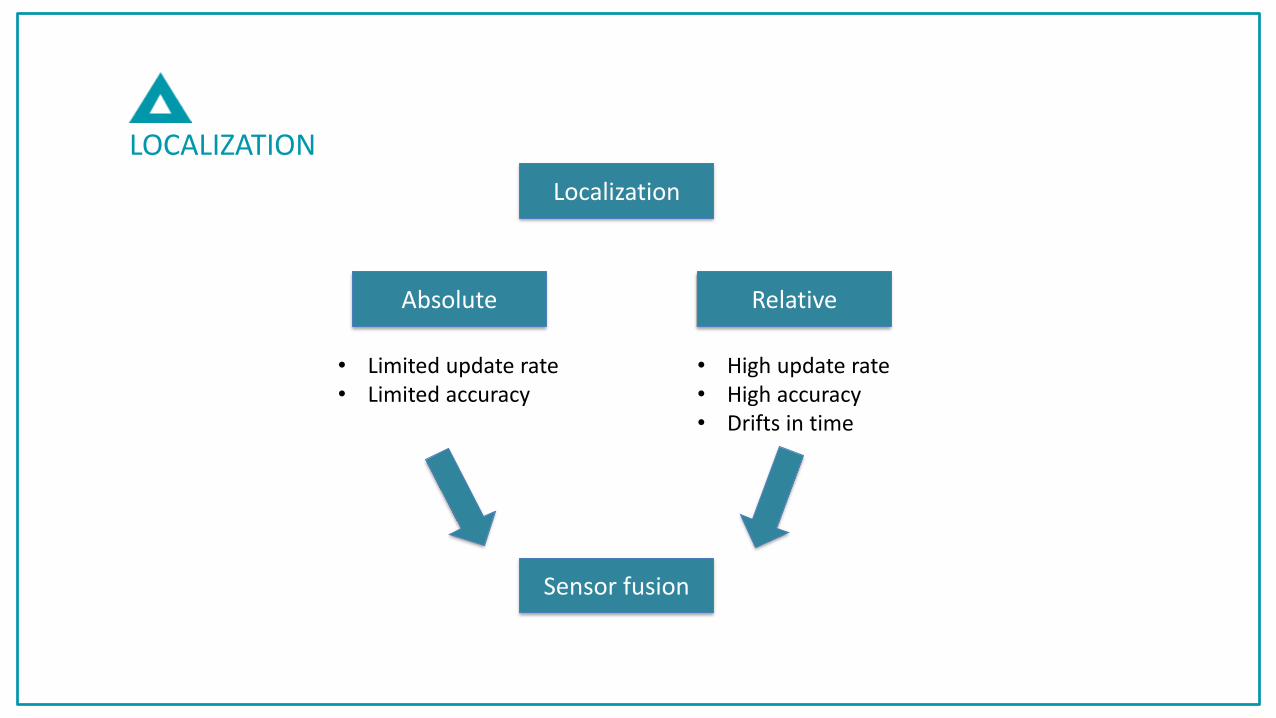
LOCALIZATION
Localization
Absolute Relative
• Limited update rate• Limited accuracy
• High update rate• High accuracy• Drifts in time
Sensor fusion
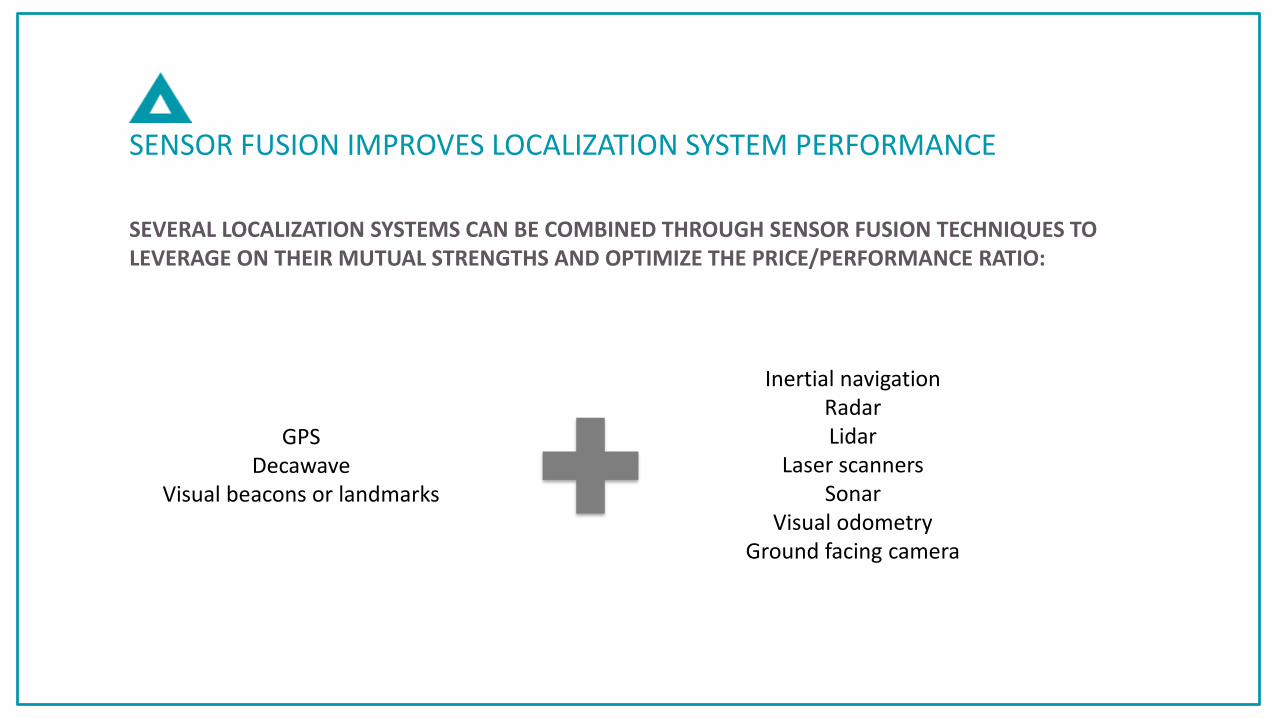
SENSOR FUSION IMPROVES LOCALIZATION SYSTEM PERFORMANCE
SEVERAL LOCALIZATION SYSTEMS CAN BE COMBINED THROUGH SENSOR FUSION TECHNIQUES TO LEVERAGE ON THEIR MUTUAL STRENGTHS AND OPTIMIZE THE PRICE/PERFORMANCE RATIO:
GPSDecawave
Visual beacons or landmarks
Inertial navigationRadarLidar
Laser scannersSonar
Visual odometryGround facing camera
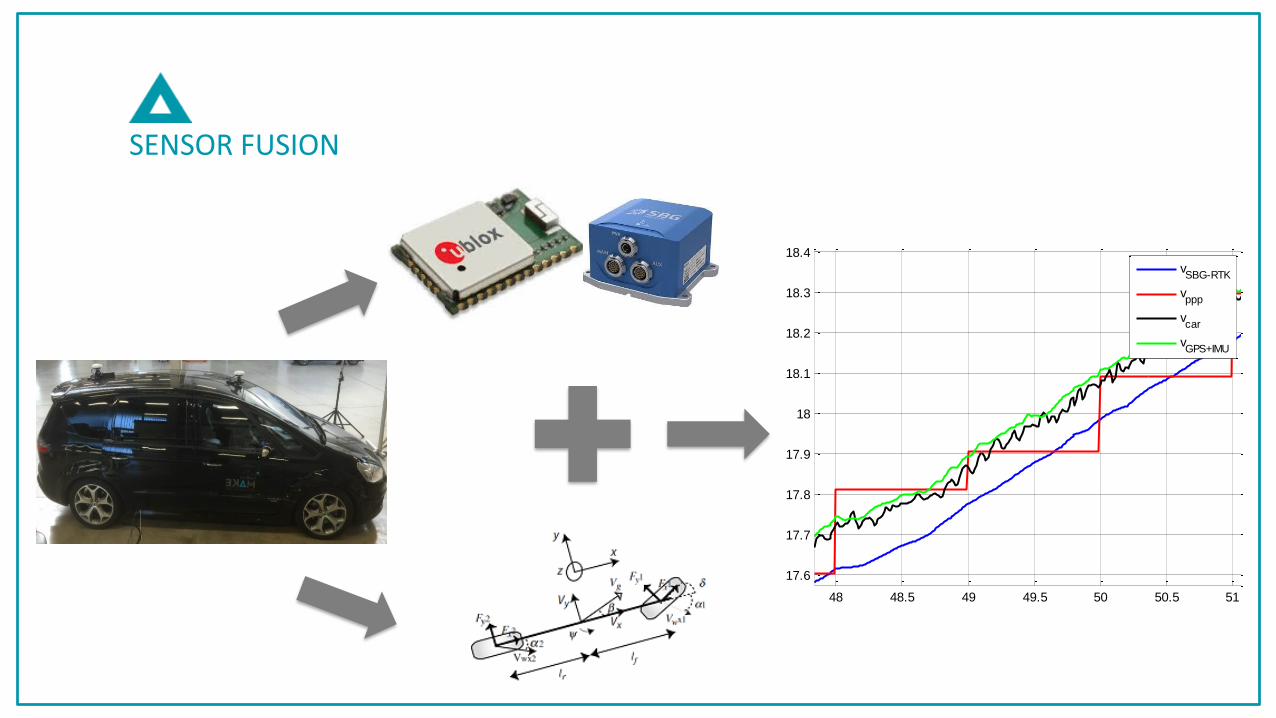
SENSOR FUSION
48 48.5 49 49.5 50 50.5 51
17.6
17.7
17.8
17.9
18
18.1
18.2
18.3
18.4
vSBG-RTK
vppp
vcar
vGPS+IMU
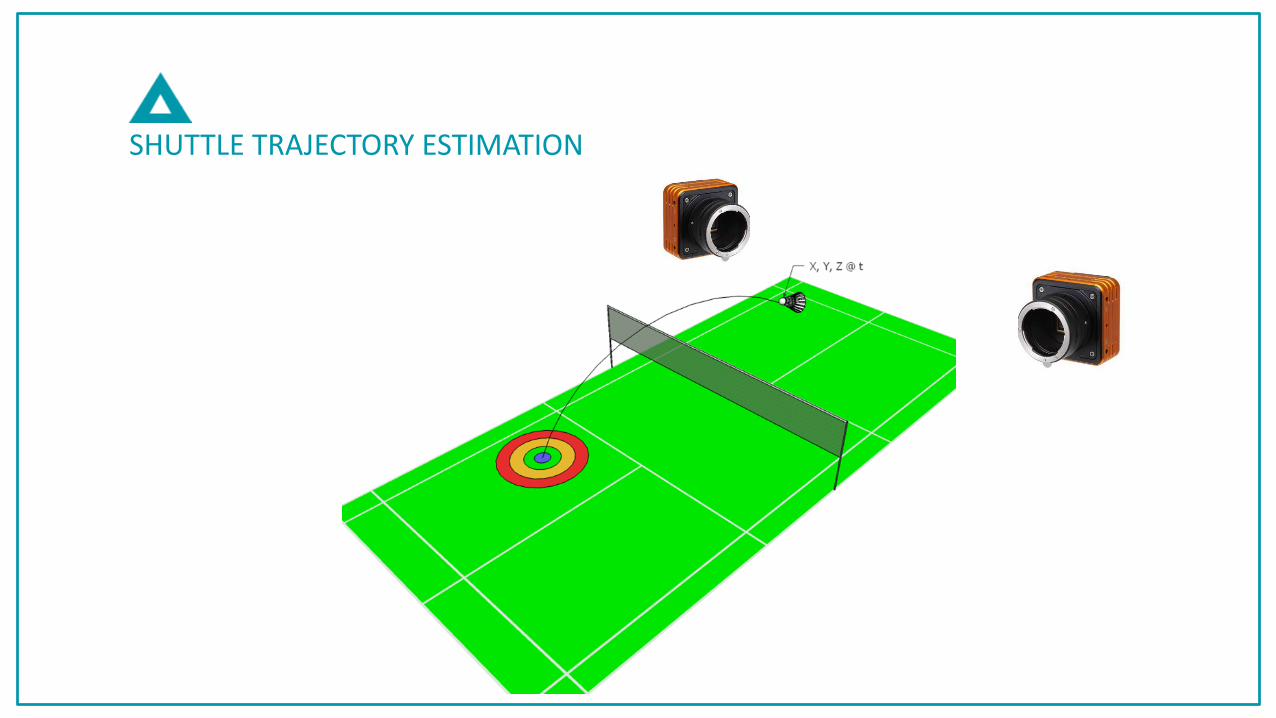
SHUTTLE TRAJECTORY ESTIMATION

SHUTTLE TRAJECTORY ESTIMATION: SIMPLIFIED MODEL
Physical model describes shuttlecock trajectories.
Error on end-position in x, y and z direction of around 5 cm after 20 measurement points.
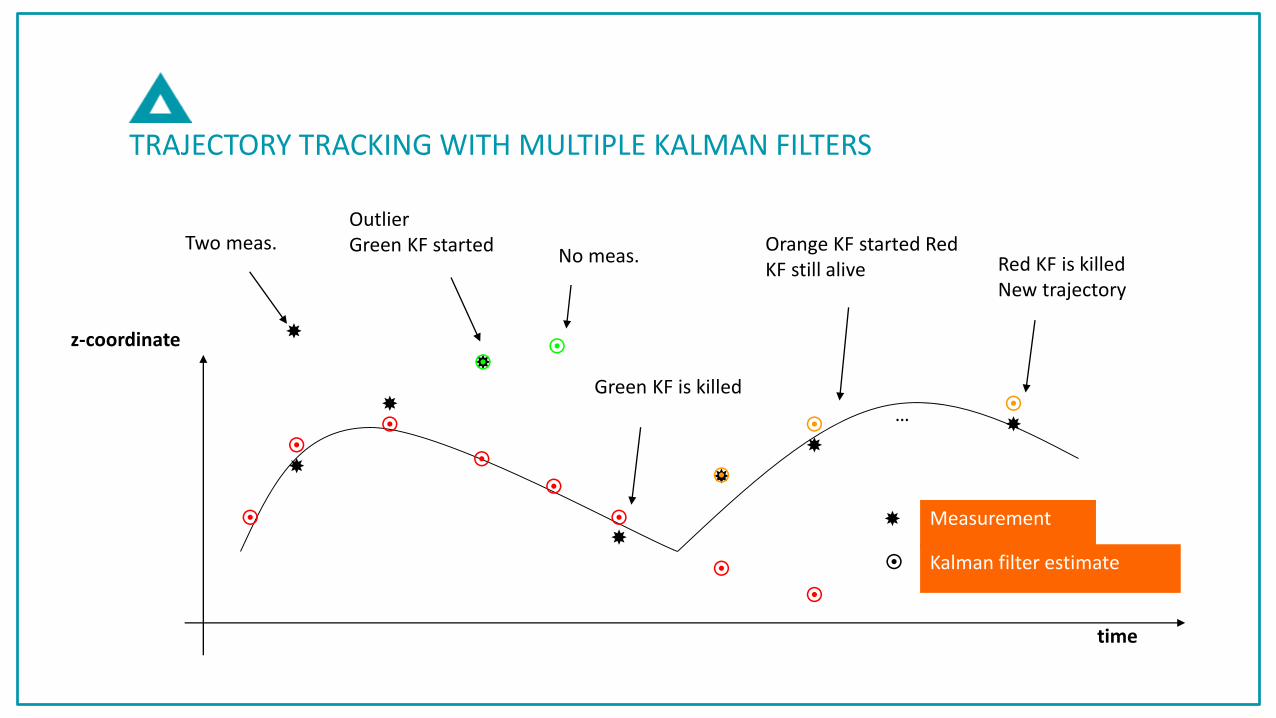
TRAJECTORY TRACKING WITH MULTIPLE KALMAN FILTERS
time
Measurement
Kalman filter estimate
Two meas.OutlierGreen KF started
No meas.
Green KF is killed
…
Orange KF started Red KF still alive Red KF is killed
New trajectory
z-coordinate
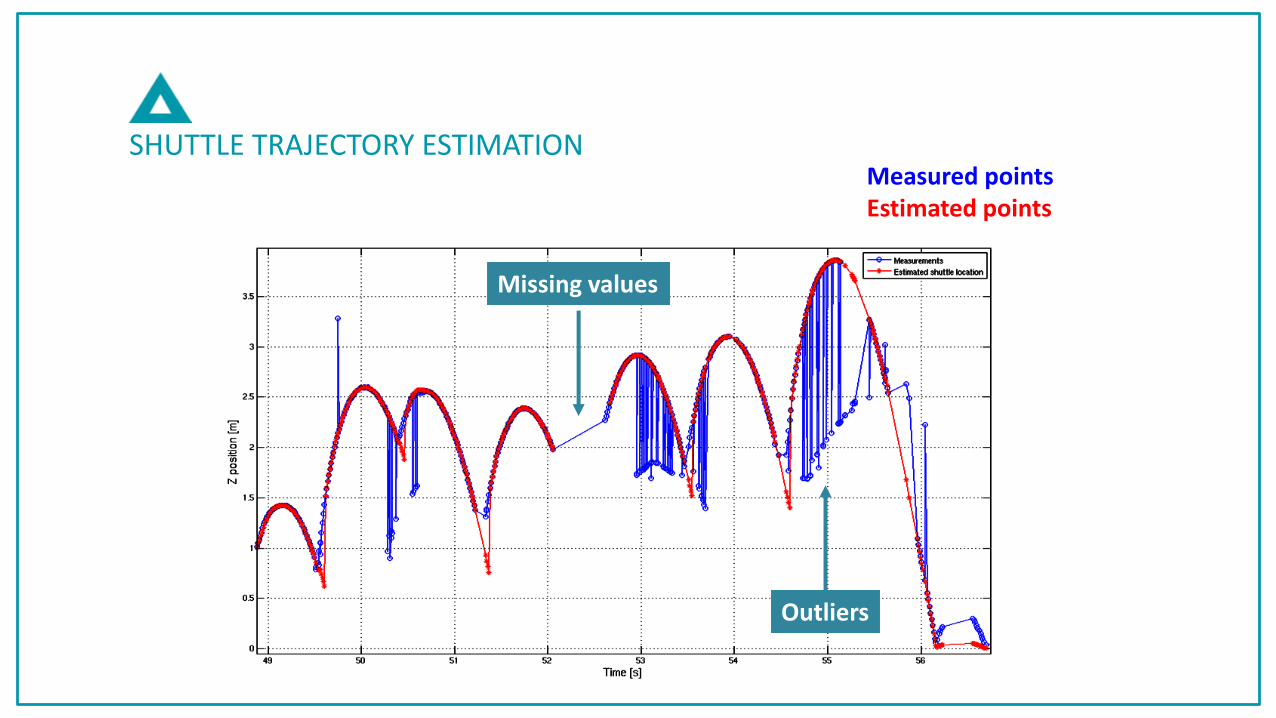
SHUTTLE TRAJECTORY ESTIMATIONMeasured pointsEstimated points
Outliers
Missing values
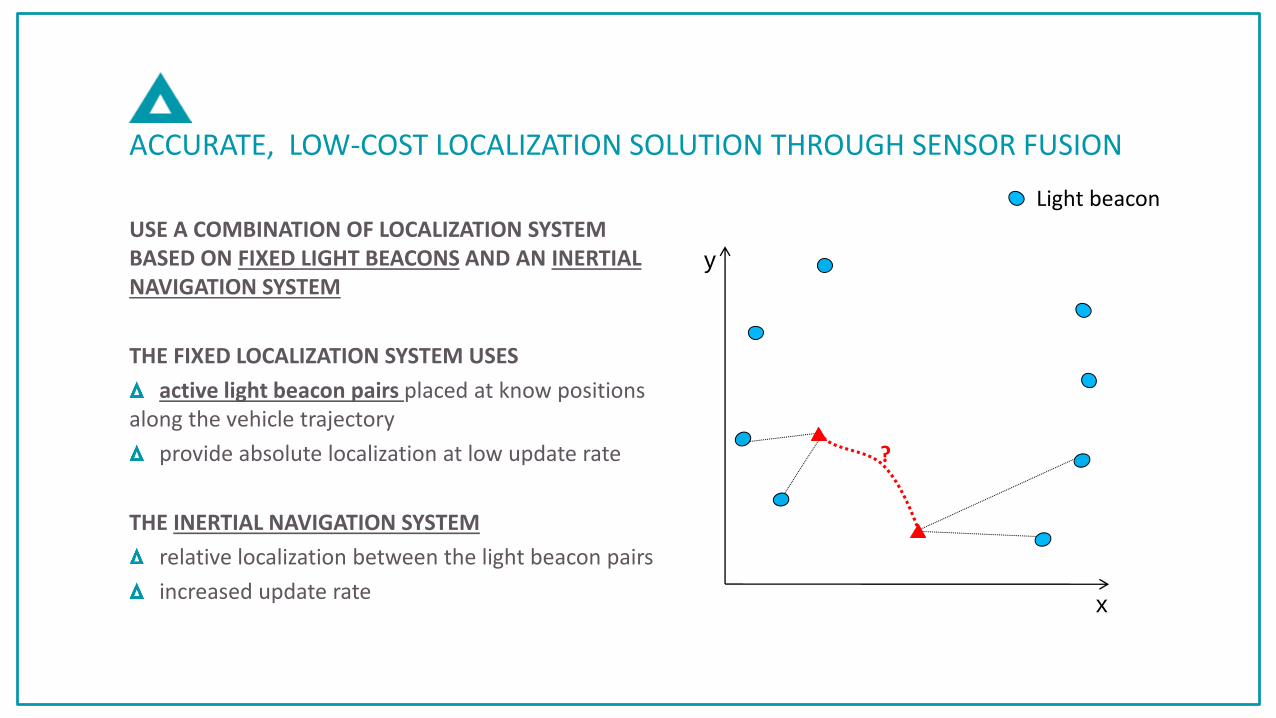
ACCURATE, LOW-COST LOCALIZATION SOLUTION THROUGH SENSOR FUSION
USE A COMBINATION OF LOCALIZATION SYSTEM BASED ON FIXED LIGHT BEACONS AND AN INERTIAL NAVIGATION SYSTEM
THE FIXED LOCALIZATION SYSTEM USES
active light beacon pairs placed at know positions along the vehicle trajectory
provide absolute localization at low update rate
THE INERTIAL NAVIGATION SYSTEM
relative localization between the light beacon pairs
increased update rate
y
x
Light beacon
?
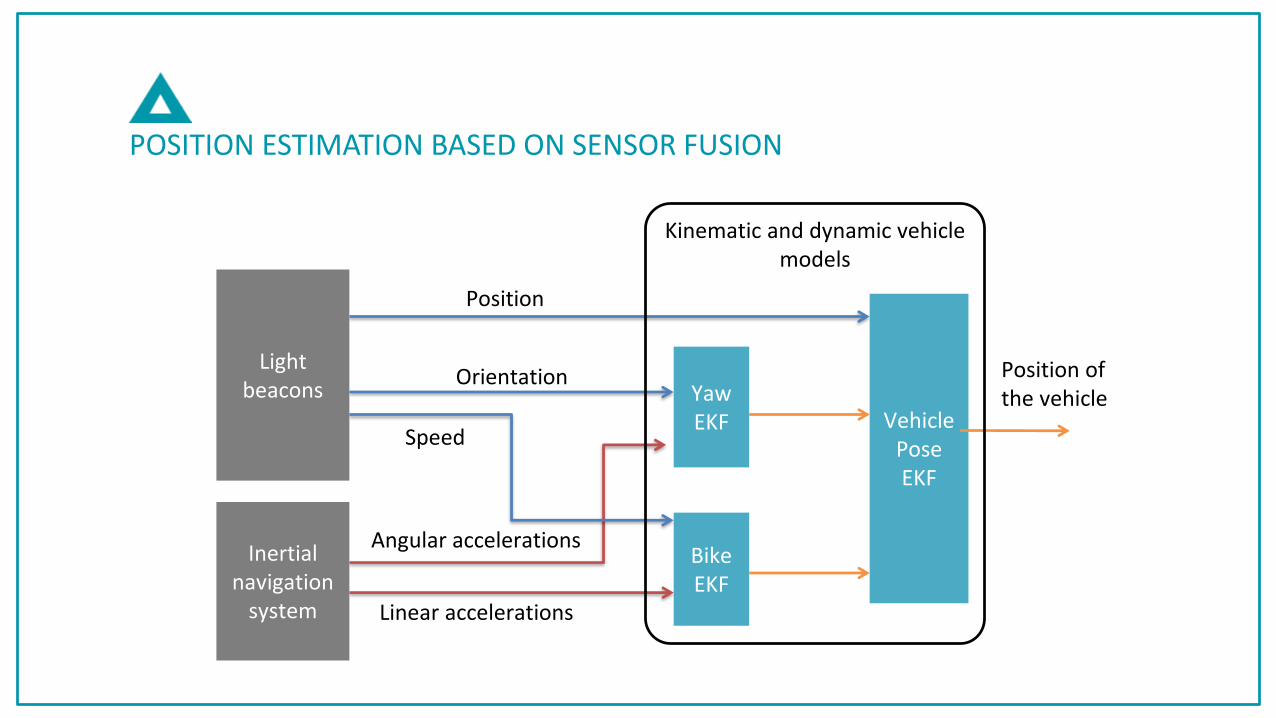
Orientation
Speed
Position
Yaw EKF
Linear accelerations
BikeEKF
Vehicle PoseEKF
Kinematic and dynamic vehicle models
Angular accelerationsInertial
navigationsystem
Light beacons
POSITION ESTIMATION BASED ON SENSOR FUSION
Position of the vehicle
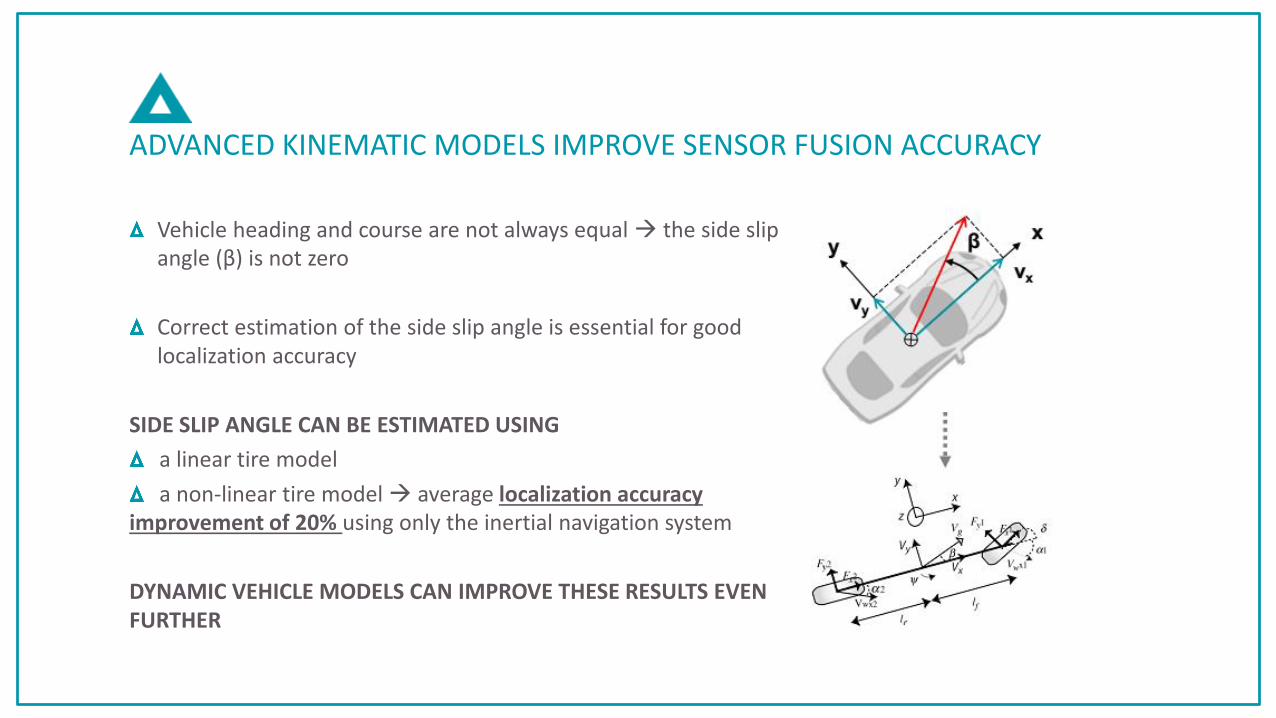
ADVANCED KINEMATIC MODELS IMPROVE SENSOR FUSION ACCURACY
Vehicle heading and course are not always equal the side slip angle (β) is not zero
Correct estimation of the side slip angle is essential for good localization accuracy
SIDE SLIP ANGLE CAN BE ESTIMATED USING
a linear tire model
a non-linear tire model average localization accuracy improvement of 20% using only the inertial navigation system
DYNAMIC VEHICLE MODELS CAN IMPROVE THESE RESULTS EVEN FURTHER

KINEMATIC AND DYNAMIC VEHICLE MODELS PLAY AN ESSENTIAL ROLE
TO ACHIEVE HIGH ACCURACY LOCALIZATION SENSOR FUSION NEEDS ADVANCED KINEMATIC AND DYNAMIC MODELS OF THE VEHICLE
The use of a more adequate tire model leads to an improvement in localization accuracy of 20%
EACH VEHICLE TYPE NEEDS AN APPROPRIATE MODEL TO ACHIEVE GOOD RESULTS
FLANDERS MAKE HAS THE NECESSARY EXPERTISE TO DEVELOP AND REFINE SUCH MODELS FOR EACH TYPE OF VEHICLE:
Train models
Boat models
Automated guided vehicle models

Off Highway Vehicle

42