Embed Size (px)
Citation preview

Localisation of an AGV in a Smart Factory
131 March 2017© sirris | www.sirris.be | [email protected] |
Filiep Vincent
28/03/2017

Agenda
2
Smart & Digital Factory @ Sirris AGV @ Diepenbeek Artificial reference markers Natural reference points
AGV @ Kortrijk Mobile Industrial Robot
© sirris | www.sirris.be | [email protected] |

Sirris – Collective centre for the Belgian technology industry
3
Mission = To support companies for introducingtechnological innovations
140 people, 8 locations Services to companies
Individual support Share risks Inspiration
Advanced Manufacturing Precision manufacturing Additive manufacturing Smart & Digial Factory
© sirris | www.sirris.be | [email protected] |

Sirris – Smart & Digital Factory
4
Focus on production systems Smart automation (for small series) Smart assembly Digital operator support Transparent factory
Application labs (D, K, L) Demonstrate technologies/applications: “seeing is believing” Experiment with technologies/applications: “the proof of the
pudding is in the eating” Close collaboration with technology providers
© sirris | www.sirris.be | [email protected] |

Sirris – Smart & Digital Factory (2)
5
Used technologies Collaborative robots Flexible grippers Digital work instructions Smart glasses (3D) vision systems AGV
© sirris | www.sirris.be | [email protected] |

Agenda
6
Smart & Digital Factory @ Sirris AGV @ Diepenbeek Artificial reference markers Natural reference points
AGV @ Kortrijk Mobile Industrial Robot
© sirris | www.sirris.be | [email protected] |

Goal AGV demo
7
To implement an AGV in a CNC production cellfor small series to investigate Challenges for the integrator and end user Potential benefits How to make AGV systems more flexible
Collaboration with Mabo E&A (Lier)
© sirris | www.sirris.be | [email protected] |

Concept demo
8© sirris | www.sirris.be | [email protected] |
Stations:• CNC-cel• CMM cel• Manual worktable• Warehouse
1 23 4

Implementation
31.03.17 10
Navigation markers + measuring
© sirris | www.sirris.be | [email protected] |

Implementation
11
Adapt the environment Communication AGV-Master AGV Stations
Cell controller from robotized CNC-machine Cell controller from robotized 3D measuring Manual processing station
© sirris | www.sirris.be | [email protected] |

Implementation
12
Route creation
Simulation Actual (user screen)
© sirris | www.sirris.be | [email protected] |

Accuracy
14
Go and return between warehouse and CNC
© sirris | www.sirris.be | [email protected] |
<5mm
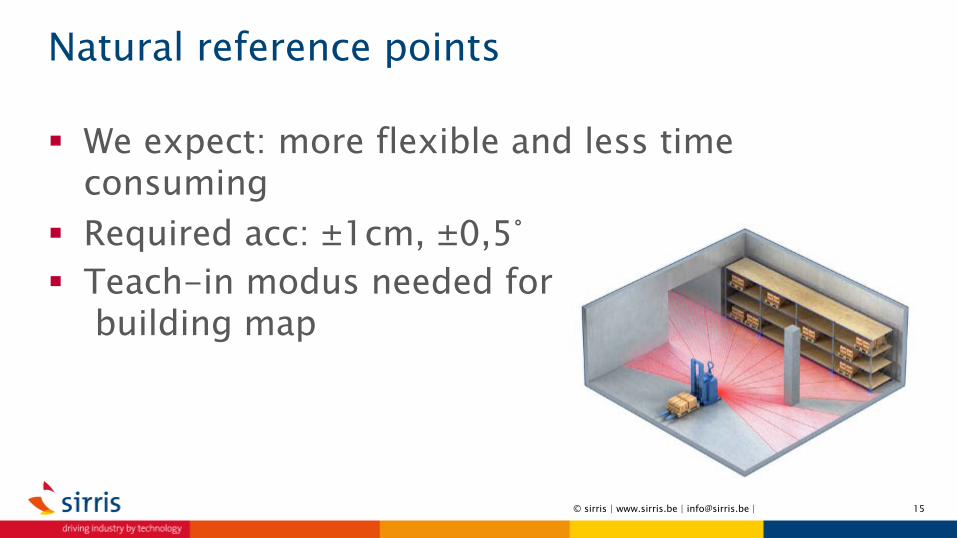
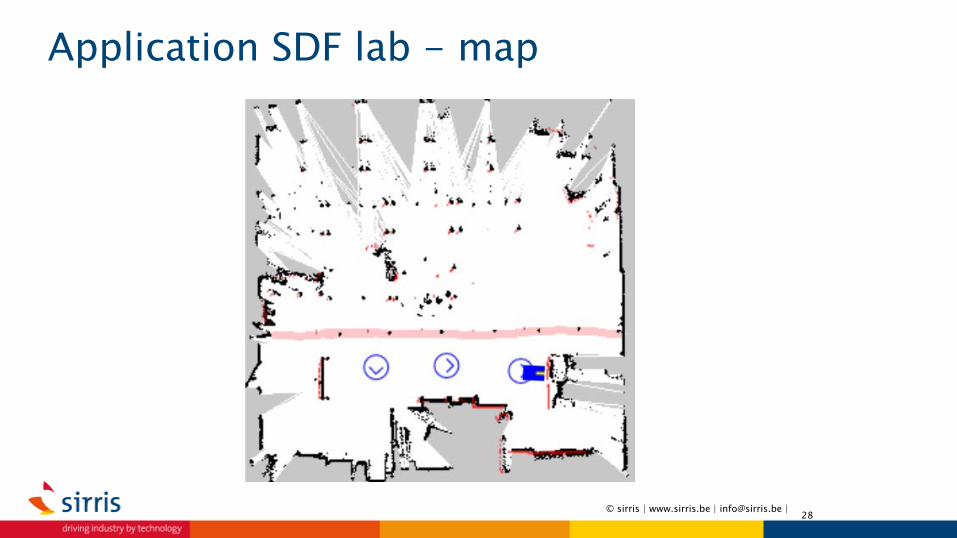
Natural reference points
15
We expect: more flexible and less time consuming
Required acc: ±1cm, ±0,5° Teach-in modus needed for
building map
© sirris | www.sirris.be | [email protected] |

Activities done
16
Survey existing 2D laserscanners Used ROS programs: Pepperl-fuchs_r2000 (driver scanner)
Gmapping (map building)
AMCL (localisation)
Rviz (visualisation)
© sirris | www.sirris.be | [email protected] |Sick, NAV350 Pepperl-Fuchs, OMD30M-R2000-B23-V1V1D-1L

Map buildingGMapping
DriverRS232Odometry
Overview - Map building2D laser scanner ROS program
DriverLaser
scannerMeasurements laser scanner
Map
Ethernet
RS232
17© sirris | www.sirris.be | [email protected] |

AMCL(Adaptive
Monte Carlo Localization)
DriverRS232Odometry
Overview - localisation2D laser scanner ROS program
DriverLaser
scannerMeasurements laserscanner
Map from GMapping
Path-planning Position
Ethernet
RS232
RS232
18© sirris | www.sirris.be | [email protected] |

Hall Mabo NV Changing environment Bad reference points
Floor imperfections
Test in real environment
19© sirris | www.sirris.be | [email protected] |Wall

Tests
Accuracy Natural reference points : ± 5mm Artificial reference markers : ± 15mm
Reliability Context dependant
Cost
21© sirris | www.sirris.be | [email protected] |

Agenda
31 March 2017 22
Smart & Digital Factory @ Sirris AGV @ Diepenbeek Artificial reference markers Natural reference points
AGV @ Kortrijk Mobile Industrial Robot
© sirris | www.sirris.be | [email protected] |

MiR100
Mobile Industrial Robot Denmark, established in 2013, 1 product Goal = automate in-house transport
Application domains: manufacturing logistics hospitals
23© sirris | www.sirris.be | [email protected] |

MiR100 Hardware 3D camera in front shield: Intel
RealSense 3 m out, ½ meter high after ½
meter Detection from 5-50 cm high
obstacle on the floor
Encoder on 2 differential wheelsused for navigation
Gyroscope used for navigation andorientation
24
Sick laserscanner S300
© sirris | www.sirris.be | [email protected] |

Controlling the MiR 0) Login: username/passw 1) create map 2) create positions 3) create mission (= program)
positions actions …
4) create operation pattern(s) 5) execute pattern
25© sirris | www.sirris.be | [email protected] |

Planner
Needed: A map (environment) A global plan (navigator) A local dynamic planner (driver)
Motion planning: Based on expanding trees, Search-Based Planning Lab. (www.sbpl.net), Carnegie
Mellon University (US)
Use the lowest cost solution: Distance Cost of each pixel
26© sirris | www.sirris.be | [email protected] |

Application @ lab in Kortrijk 3 cells => 3 positions cell 1 = picking cell cell 2 = assembly cell cell 3 = QC cell
1 mission in infinite loop Push on button = command to proceed Blue LED bar = signals arrival at position
27© sirris | www.sirris.be | [email protected] |

+32 491 345 392
Filiep Vincent www.linkedin.com/in/filiepvincent
filiepvincent
31.03.17© sirris | www.sirris.be | [email protected] |