Embed Size (px)
Citation preview
© 2003 by CRC Press LLC
11
2
Unit Systems: Dimensional Analysis
and Similarity
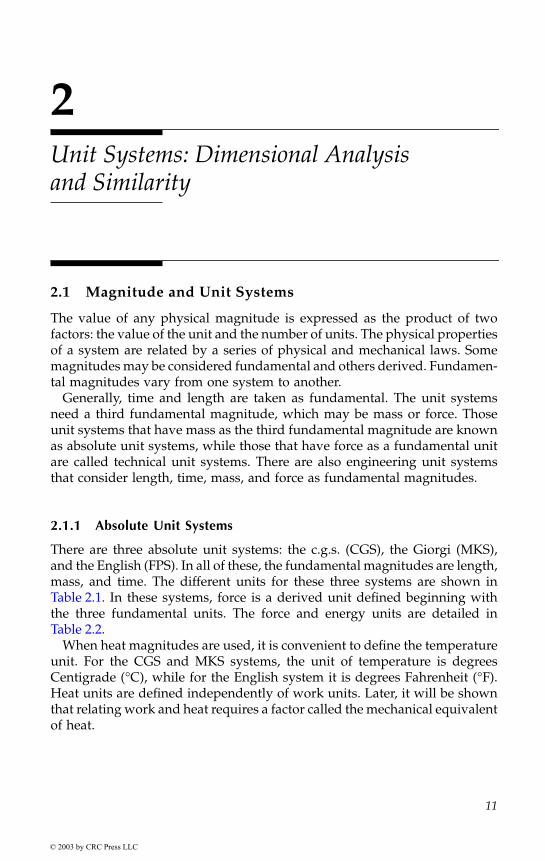
2.1 Magnitude and Unit Systems
The value of any physical magnitude is expressed as the product of twofactors: the value of the unit and the number of units. The physical propertiesof a system are related by a series of physical and mechanical laws. Somemagnitudes may be considered fundamental and others derived. Fundamen-tal magnitudes vary from one system to another.
Generally, time and length are taken as fundamental. The unit systemsneed a third fundamental magnitude, which may be mass or force. Thoseunit systems that have mass as the third fundamental magnitude are knownas absolute unit systems, while those that have force as a fundamental unitare called technical unit systems. There are also engineering unit systemsthat consider length, time, mass, and force as fundamental magnitudes.
2.1.1 Absolute Unit Systems
There are three absolute unit systems: the c.g.s. (CGS), the Giorgi (MKS),and the English (FPS). In all of these, the fundamental magnitudes are length,mass, and time. The different units for these three systems are shown inTable 2.1. In these systems, force is a derived unit defined beginning withthe three fundamental units. The force and energy units are detailed inTable 2.2.
When heat magnitudes are used, it is convenient to define the temperatureunit. For the CGS and MKS systems, the unit of temperature is degreesCentigrade (°C), while for the English system it is degrees Fahrenheit (°F).Heat units are defined independently of work units. Later, it will be shownthat relating work and heat requires a factor called the mechanical equivalentof heat.
TX69299 ch01 frame.book Page 11 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
12
Unit Operations in Food Engineering
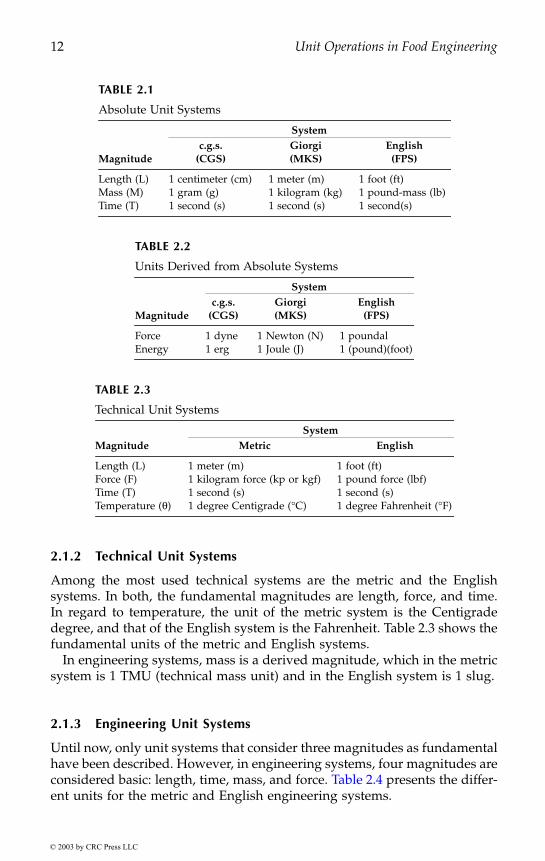
2.1.2 Technical Unit Systems
Among the most used technical systems are the metric and the Englishsystems. In both, the fundamental magnitudes are length, force, and time.In regard to temperature, the unit of the metric system is the Centigradedegree, and that of the English system is the Fahrenheit. Table 2.3 shows thefundamental units of the metric and English systems.
In engineering systems, mass is a derived magnitude, which in the metricsystem is 1 TMU (technical mass unit) and in the English system is 1 slug.
2.1.3 Engineering Unit Systems
Until now, only unit systems that consider three magnitudes as fundamentalhave been described. However, in engineering systems, four magnitudes areconsidered basic: length, time, mass, and force. Table 2.4 presents the differ-ent units for the metric and English engineering systems.
TABLE 2.1
Absolute Unit Systems
Magnitude
Systemc.g.s. Giorgi English
(CGS) (MKS) (FPS)
Length (L) 1 centimeter (cm) 1 meter (m) 1 foot (ft)Mass (M) 1 gram (g) 1 kilogram (kg) 1 pound-mass (lb)Time (T) 1 second (s) 1 second (s) 1 second(s)
TABLE 2.2
Units Derived from Absolute Systems
Magnitude
Systemc.g.s. Giorgi English
(CGS) (MKS) (FPS)
Force 1 dyne 1 Newton (N) 1 poundalEnergy 1 erg 1 Joule (J) 1 (pound)(foot)
TABLE 2.3
Technical Unit Systems
Magnitude
SystemMetric English
Length (L) 1 meter (m) 1 foot (ft)Force (F) 1 kilogram force (kp or kgf) 1 pound force (lbf)Time (T) 1 second (s) 1 second (s)Temperature (
θ
) 1 degree Centigrade (°C) 1 degree Fahrenheit (°F)
TX69299 ch01 frame.book Page 12 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity
13
When defining mass and force as fundamental, an incongruity may arise,since these magnitudes are related by the dynamics basic principle. To avoidthis incompatibility, a correction or proportionality factor (
g
c
) should beinserted. The equation of this principle would be:
Observe that
g
c
has mass units (acceleration/force). The value of thiscorrection factor in the engineering systems is:
2.1.4 International Unit System (IS)
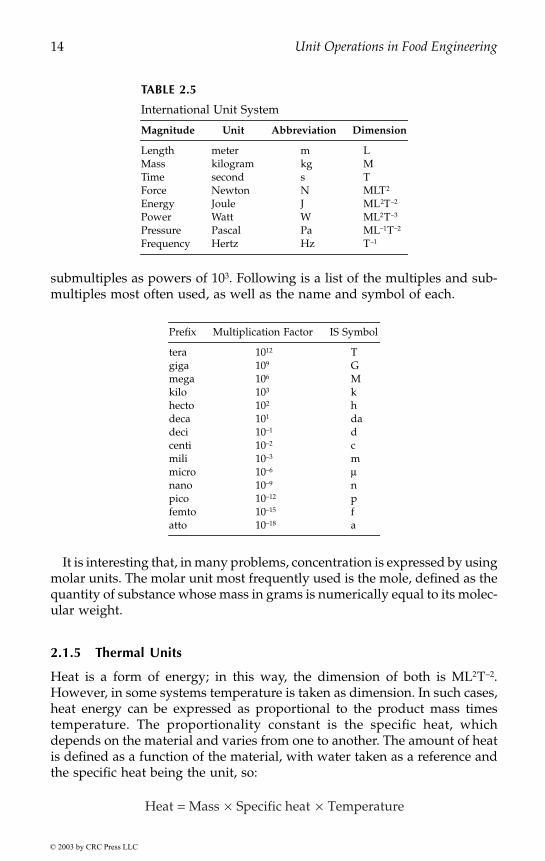
It was convenient to unify the use of the unit systems when the Anglo–Saxoncountries incorporated the metric decimal system. With that purpose, theMKS was adopted as the international system and denoted as IS. Althoughthe obligatory nature of the system is recognized, other systems are still used;however, at present many engineering journals and books are edited onlyin IS, making it more and more acceptable than other unit systems. Table 2.5presents the fundamental units of this system along with some supplemen-tary and derived units.
Sometimes the magnitude of a selected unit is too big or too small, makingit necessary to adopt prefixes to indicate multiples and submultiples of thefundamental units. Generally, it is advisable to use these multiples and
TABLE 2.4
Engineering Unit Systems
Magnitude
SystemMetric English
Length (L) 1 meter (m) 1 foot (ft)Mass (M) 1 kilogram (kg) 1 pound-mass (lb)Force (F) 1 kilogram force (kp or kgf) 1 pound force (lbf)Time (T) 1 second (s) 1 second (s)Temperature (
θ
) 1 degree Centigrade (°C) 1 degree Fahrenheit (°F)
gc × ×Force = Mass Acceleration
Metric system: 9.81kgmass meter
kgforce second9.81
kg mkg s2 2
gC =( )( )
( )( )=
⋅⋅
English system: 32.17lbmass foot
lbforce second32.17
lb ftlbf s2 2
gC =( )( )
( )( )=
⋅⋅
TX69299 ch01 frame.book Page 13 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
14
Unit Operations in Food Engineering
submultiples as powers of 10
3
. Following is a list of the multiples and sub-multiples most often used, as well as the name and symbol of each.
It is interesting that, in many problems, concentration is expressed by usingmolar units. The molar unit most frequently used is the mole, defined as thequantity of substance whose mass in grams is numerically equal to its molec-ular weight.
2.1.5 Thermal Units
Heat is a form of energy; in this way, the dimension of both is ML
2
T
–2
.However, in some systems temperature is taken as dimension. In such cases,heat energy can be expressed as proportional to the product mass timestemperature. The proportionality constant is the specific heat, whichdepends on the material and varies from one to another. The amount of heatis defined as a function of the material, with water taken as a reference andthe specific heat being the unit, so:
TABLE 2.5
International Unit System
Magnitude Unit Abbreviation Dimension
Length meter m LMass kilogram kg MTime second s TForce Newton N MLT
2
Energy Joule J ML
2
T
–2
Power Watt W ML
2
T
–3
Pressure Pascal Pa ML
–1
T
–2
Frequency Hertz Hz T
–1
Prefix Multiplication Factor IS Symbol
tera 10
12
Tgiga 10
9
Gmega 10
6
Mkilo 10
3
khecto 10
2
hdeca 10
1
dadeci 10
–1
dcenti 10
–2
cmili 10
–3
mmicro 10
–6
µ
nano 10
–9
npico 10
–12
pfemto 10
–15
fatto 10
–18
a
Heat Mass Specific heat Temperature= × ×
TX69299 ch01 frame.book Page 14 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity
15
The heat unit depends on the unit system adopted. Thus:
• Metric system:• Calorie: heat needed to raise the temperature of a gram of water
from 14.5 to 15.5°C• English systems:
• Btu
(British thermal unit): quantity of heat needed to raise thetemperature of a pound of water one Fahrenheit degree (from60 to 61°F)
• Chu (Centigrade heat unit or pound calorie): quantity of heatneeded to raise the temperature of one pound of water onedegree Centigrade
• International system:• Calorie: since heat is a form of energy, its unit is the Joule. The
calorie can be defined as a function of the Joule: 1 calorie = 4.185Joules
Since heat and work are two forms of energy, it is necessary to define afactor that relates them. For this reason, the denominated mechanical equiv-alent of heat (
Q
) is defined so that:
so:
2.1.6 Unit Conversion
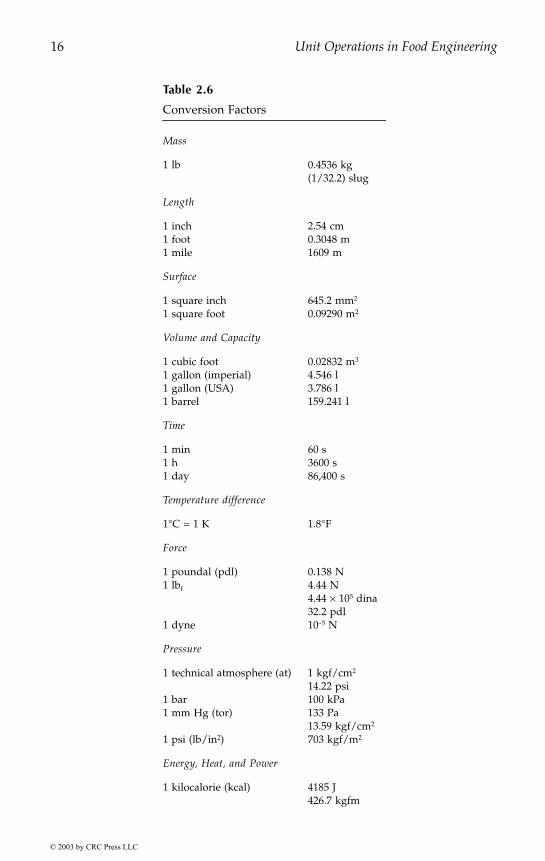
The conversion of units from one system to another is easily carried out ifthe quantities are expressed as a function of the fundamental units mass,length, time, and temperature. The so-called conversion factors are used toconvert the different units. The conversion factor is the number of units ofa certain system contained in one unit of the corresponding magnitude ofanother system. The most common conversion factors for the different mag-nitudes are given in Table 2.6.
When converting units, it is necessary to distinguish the cases in whichonly numerical values are converted from those in which a formula shouldbe converted. When it is necessary to convert numerical values from oneunit to another, the equivalencies between them, given by the conversionfactors, are used directly.
Q × =Heat energy Mechanical energy
Q = = =−
− −Mechanical energyHeat energy
MLT LM
L T2
2 2 1
θθ
TX69299 ch01 frame.book Page 15 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
16
Unit Operations in Food Engineering
Table 2.6
Conversion Factors
Mass
1 lb 0.4536 kg(1/32.2) slug
Length
1 inch 2.54 cm1 foot 0.3048 m1 mile 1609 m
Surface
1 square inch 645.2 mm
2
1 square foot 0.09290 m
2
Volume and Capacity
1 cubic foot 0.02832 m
3
1 gallon (imperial) 4.546 l1 gallon (USA) 3.786 l1 barrel 159.241 l
Time
1 min 60 s1 h 3600 s1 day 86,400 s
Temperature difference
1°C = 1 K 1.8°F
Force
1 poundal (pdl) 0.138 N1 lb
f
4.44 N4.44
×
10
5
dina32.2 pdl
1 dyne 10
–5
N
Pressure
1 technical atmosphere (at) 1 kgf/cm
2
14.22 psi1 bar 100 kPa1 mm Hg (tor) 133 Pa
13.59 kgf/cm
2
1 psi (lb/in
2
) 703 kgf/m
2
Energy, Heat, and Power
1 kilocalorie (kcal) 4185 J426.7 kgfm
TX69299 ch01 frame.book Page 16 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity
17
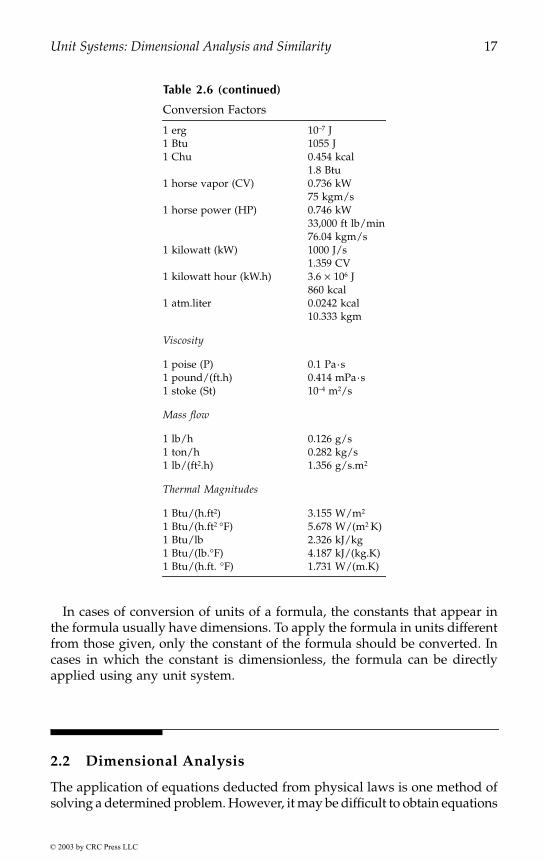
In cases of conversion of units of a formula, the constants that appear inthe formula usually have dimensions. To apply the formula in units differentfrom those given, only the constant of the formula should be converted. Incases in which the constant is dimensionless, the formula can be directlyapplied using any unit system.
2.2 Dimensional Analysis
The application of equations deducted from physical laws is one method ofsolving a determined problem. However, it may be difficult to obtain equations
1 erg 10
–7
J1 Btu 1055 J1 Chu 0.454 kcal
1.8 Btu1 horse vapor (CV) 0.736 kW
75 kgm/s1 horse power (HP) 0.746 kW
33,000 ft lb/min76.04 kgm/s
1 kilowatt (kW) 1000 J/s1.359 CV
1 kilowatt hour (kW.h) 3.6
×
10
6
J860 kcal
1 atm.liter 0.0242 kcal10.333 kgm
Viscosity
1 poise (P) 0.1 Pa ·s1 pound/(ft.h) 0.414 mPa ·s1 stoke (St) 10
–4
m
2
/s
Mass flow
1 lb/h 0.126 g/s1 ton/h 0.282 kg/s1 lb/(ft
2
.h) 1.356 g/s.m
2
Thermal Magnitudes
1 Btu/(h.ft
2
) 3.155 W/m
2
1 Btu/(h.ft
2
°F) 5.678 W/(m
2
K)1 Btu/lb 2.326 kJ/kg1 Btu/(lb.°F) 4.187 kJ/(kg.K)1 Btu/(h.ft. °F) 1.731 W/(m.K)
Table 2.6 (continued)
Conversion Factors
TX69299 ch01 frame.book Page 17 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
18
Unit Operations in Food Engineering
of that type; therefore, in some cases it will be necessary to use equationsderived in an empirical form.
In the first case, the equations are homogeneous from a dimensional pointof view. That is, their terms have the same dimensions and the possibleconstants that may appear will be dimensionless. This type of equation canbe applied in any unit system when using coherent units for the samemagnitudes. On the other hand, equations experimentally obtained may notbe homogeneous regarding the dimensions, since it is normal to employdifferent units for the same magnitude.
The objective of dimensional analysis is to relate the different variablesinvolved in the physical processes. For this reason, the variables are groupedin dimensionless groups or rates, allowing discovery of a relationship amongthe different variables. Table 2.7 presents the dimensionless modules usuallyfound in engineering problems. Dimensional analysis is an analyticalmethod in which, once the variables that intervene in a physical phenome-non are known, an equation to bind them can be established. That is, dimen-sional analysis provides a general relationship among the variables thatshould be completed with the assistance of experimentation to obtain thefinal equation binding all the variables.
2.2.1 Buckingham’s
�
Theorem
Every term that has no dimensions is defined as
factor
�
. According toBridgman, there are three fundamental principles of the dimensional analysis:
1. All the physical magnitudes may be expressed as power functionsof a reduced number of fundamental magnitudes.
2. The equations that relate physical magnitudes are dimensionallyhomogeneous; this means that the dimensions of all their termsmust be equal.
3. If an equation is dimensionally homogeneous, it may be reducedto a relation among a complete series of dimensionless rates orgroups. These induce all the physical variables that influence thephenomenon, the dimensional constants that may correspond tothe selected unit system, and the universal constants related to thephenomenon treated.
This principle is denoted as Buckingham’s
π
theorem. A series of dimen-sionless groups is complete if all the groups among them are independent;any other dimensionless group that can be formed will be a combination oftwo or more groups from the complete series.
Because of Buckingham’s
π
theorem, if the series
q
1
,
q
2
, …,
q
n
is the set of
n
independent variables that define a problem or a physical phenomenon,then there will always exist an explicit function of the type:
TX69299 ch01 frame.book Page 18 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity
19
(2.1)
This way, a number of dimensionless factors
p
can be defined with all thevariables; hence:
TABLE 2.7
Dimensionless Modules
Modules Expression Equivalence
Biot (Bi)
Bodenstein (Bo) (Re)(Sc)
Euler (Eu)
Froude (Fr)
Graetz (Gz) (Re)(Pr)(d/L)
Grashof (Gr)
Hedstrom (He)
Nusselt (Nu)
Peclet (Pe) (Re)(Pr)
Power (Po)
Prandtl (Pr)
Reynolds (Re)
Schmidt (Sc)
Sherwood (Sh)
Stanton (St) (Nu)[(Re)(Pr)]
–1
Weber (We)
hdk
vdD
∆Pvρ 2
d Ng
P
ρvd Ck L
P2 ˆ
3 2
2
g d Tβ ρη∆
0dσ ρη′
h dk
ρvdCk
Pˆ
5
Pd NP ρ
CkP η
ρηvd
ηρ D
k d
Dg
h
C vPˆ ρ
ρσ
2l v
f q q qn1 2 0, , ...., =( )
TX69299 ch01 frame.book Page 19 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
20
Unit Operations in Food Engineering
In this way,
i
factors
π
are obtained, each one a function of the variablesraised to a power that may be positive, negative, or null. The number ofdimensionless factors
π
will be
i
, where:
i
=
n
–
k
, with
n
representing thenumber of independent variables and
k
denoting the characteristic of thematrix formed by the exponents of the dimensional equations of the differentvariables and constants in relation to a defined unit system.
These i dimensionless factors
π
1
,
π
2
, …,
π
i
will be related by means of afunction:
(2.2)
that can be applied in any unit system. Sometimes it is difficult to find thistype of relationship, so a graphical representation that relates the differentparameters is used as an alternative.
2.2.2 Dimensional Analysis Methods
The three main methods for dimensional analysis are Buckingham’s method,Rayleigh’s method, and the method of differential equations. The first twomethods will be studied in detail, and the third will be briefly described.
2.2.2.1 Buckingham’s Method
The variables that may influence the phenomenon studied are listed first.Dimensional equations of the different variables are established, as are thedimensional constants. When variables have the same dimensions, only oneis chosen. The rest of the variables are divided by the chosen variable,obtaining dimensionless groups that will be added to the total obtained.These dimensionless rates are the so-called form factors.
The next step is to build the matrix with the exponents of the magnitudescorresponding to the different variables and dimensionless constants. Thus,for the case of
n
variables
q
1
,
q
2
, …,
q
n
and the constant
g
c
:
π
π
π
1 11
22
2 11
22
11
22
= …
= …
= …
q q q
q q q
q q q
a anan
b bnbn
ip p
npn
, , ,
, , ,
, , ,
LLLLLLLLLL
LLLLLLLLLL
f iπ π π1 2 0, , ,…( ) =
TX69299 ch01 frame.book Page 20 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 21
The determinant k is obtained from this matrix. This value represents theminimum number of variables and constants that do not form a dimension-less group.
Next, the i dimensionless groups or factors (π) are formed. Each group isformed by the product of k + 1 factors q, with each factor a dimensionlessvariable or constant, raised to powers that should be determined. k dimen-sionless factors will be the variables that make the matrix to be of determi-nant k, in addition to each of the n – k remaining variables with a unitexponent. In this way, the factors π will be:
In this set of equations, the magnitudes (q1, q2, …, qk), variables, andconstants contain as a whole the total of fundamental magnitudes of the unitsystem selected. The set of exponents a1, b1, …, p1; a2, b2, … p2, etc., shouldbe such that the groups lack dimensions.
Since the factors π lack dimensions, the magnitudes of each variable areset up in the different dimensionless collections, grouping each magnitudein such a way that it is raised to a power that is a combination of theexponents of the variables in which this magnitude appears. This combina-tion of exponents should be equal to zero, obtaining for each factor π a systemof k equations and k unknowns. The systems are solved to determine theexponents of the variables in each dimensionless group.
With these i factors and possible form factors, the following function maybe obtained:
(2.3)
q q q gn c1 2 LLLLL
LMFT
Matrix of the exponentsof the magnitudes for thedimensional variablesand constantsθ
π
π
π
1 11
22
1
2 11
22
2
11
22
= ⋅ … ⋅
= ⋅ … ⋅
= ⋅ ⋅
+
+
+ −
q q q q
q q q q
q q q q
a akak
k
b bnbn
k
ip p
npn
k i n
LLLLLLLL
LLLLLLLL
–
f iπ π π1 2 0, , , ,… …( ) =
TX69299 ch01 frame.book Page 21 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
22 Unit Operations in Food Engineering
In some cases there is no need to form the matrix of exponents or determineits determinant, since by simple observation the minimum number of vari-ables and constants that do not form a dimensionless group can be found.
2.2.2.2 Rayleigh’s Method
As in the previous method, the physical variables that participate in theprocess should initially be identified. Next, one of the variables, generallythe variable of greatest interest, is expressed in an analytical way as anexponent function of the remaining variables:
(2.4)
where K is a dimensionless constant.The variables and possible dimensionless constants are substituted by the
magnitudes of a unit system, applying the homogeneity conditions for eachmagnitude. In this way, as many equations as there are fundamental mag-nitudes in the selected unit system are obtained. If p is the number of suchmagnitudes, the number of unknowns in this equation system will be n – 1:
Equations p
Unknowns n – 1 exponents
Since the number of unknowns is greater than the number of equations,(n – 1) – p exponents are chosen, while the rest are set up as a function of theexponents. In this way, all the exponents may be established as a functionof those (n – 1 – p) selected and are substituted in the last equation. Thevariables and dimensional constants are grouped in such a way that groupsare raised to the same power. Thus, (n – 1 – p) groups that have risen to theselected power are obtained, in addition to one group whose power is theunit. The relationship among dimensionless groups is thus obtained:
(2.5)
2.2.2.3 Method of Differential Equations
This method is based on the differential equations of momentum, mass, andenergy conservation which can be applied to a given problem, as well asthose that can be obtained from the boundary conditions. Since this casebegins with dimensionally homogeneous equations, if all the terms in eachequation are divided by any of them, as many dimensionless groups as termsthat had the equation minus one can be obtained.
The advantage of this method is that it is less probable that variables thatmay have influence on a determined problem will be omitted. This can onlyoccur when an incorrect equation is employed. Also, this method supplies
q K q q qa anan
1 22
33= …
π π π π1 2 3= …( )f i, , ,
TX69299 ch01 frame.book Page 22 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 23
a more intuitive approach to the physical meaning of the resultant dimen-sionless groups (Dickey and Fenic, 1976).
2.3 Similarity Theory
For design and building of industrial equipment, two methods are based onthe construction of models, which may be mathematical or empirical. Theindustrial equipment is called prototype.
• Mathematical models: beginning with theoretical aspects, it is pos-sible, sometimes, to design and build a prototype applicable toindustrial scale. In practice, this rarely happens.
• Empirical models: in this case experimentation in reduced modelsis necessary, following directions given by the dimensional analysis.
The values of the prototype are calculated from the values found in themodel. A series of similarity criteria must be met in order to pass from themodel to the prototype.
The main difference between the two models relies on the fact that themathematical model is applicable at any scale, while, for the application ofthe empirical model, a series of similarity criteria between the model andthe prototype should be in agreement.
In a general way, the similarity criteria can be expressed according to thefollowing linear equation:
(2.6)
where m and m′ are measures of the same magnitude in the model and theprototype, respectively. The proportionality constant k receives the name ofscale factor.
This type of similarity is applicable to the different magnitudes that encir-cle the system, such as geometry, force profile, velocity, temperature, andconcentration. Therefore, the different similarity criteria will be as follows:
• Geometric similarity refers to the proportionality between thedimensions of the model and the prototype.
• Mechanical similarity, whether static, kinematic, or dynamic, refersto the proportionality among deformations, velocities, and forces,respectively.
• Thermal similarity is relevant if there is proportionality betweenthe temperatures.
• Concentration similarity refers to chemical processes, whichrequire proportionality between concentrations and compositions.
′ =m km
TX69299 ch01 frame.book Page 23 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
24 Unit Operations in Food Engineering
The geometric similarity is a previous requisite for the other criteria. Ingeneral, each results in a requisite for the following similarities.
Geometric and mechanical similarities will be studied next; thermal andconcentration similarities will be briefly discussed. The thermal, concentra-tion, and chemical similarities may be met working at equal temperatureand concentration.
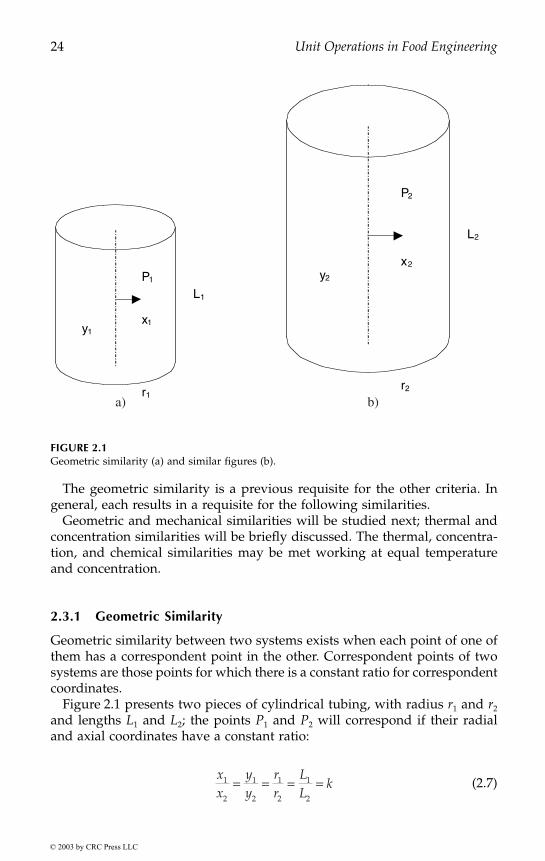
2.3.1 Geometric Similarity
Geometric similarity between two systems exists when each point of one ofthem has a correspondent point in the other. Correspondent points of twosystems are those points for which there is a constant ratio for correspondentcoordinates.
Figure 2.1 presents two pieces of cylindrical tubing, with radius r1 and r2
and lengths L1 and L2; the points P1 and P2 will correspond if their radialand axial coordinates have a constant ratio:
(2.7)
FIGURE 2.1Geometric similarity (a) and similar figures (b).
L1
P1
x1y1
r1
P2
x2
y2
r2
L2
a) b)
xx
yy
rr
LL
k1
2
1
2
1
2
1
2
= = = =
TX69299 ch01 frame.book Page 24 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 25
Another form used to define geometric similarity is to employ ratiosbetween dimensions that belong to the same system and receive the nameof shape factors. Thus:
(2.8)
2.3.2 Mechanical Similarity
2.3.2.1 Static Similarity
Static similarity links the proportionality of the deformations. However, thistype of similarity can be neglected if materials with enough resistance areemployed. When constant tension is applied to solid bodies and geometricsimilarity is maintained, static similarity exists.
2.3.2.2 Kinematic Similarity
Once the model and the prototype are similar, the proportionality ratiosbetween velocities and times should be sought. In this way, kinematic sim-ilarity complies when:
(2.9)
where v1 and v2 are the velocities for correspondent points of the model andthe prototype.
2.3.2.3 Dynamic Similarity
Dynamic similarity implies equality of all rates and dimensionless numbersamong the significant forces that intervene in analyzed systems. Differentequalities that depend on the forces acting on the systems should be com-plied with in order to have dynamic similarity. Thus, if inertia and frictionforces act, then the equality of the Reynolds number should conform. If, inaddition, the gravity forces act, then the equality of Froude’s module shouldbe complied with. It will be necessary to obey the equality of Weber’s modulewhen free liquid–gas surfaces are present, since superficial tensions appear.When pressure forces exist, the equality of Euler’s number should be com-plied with.
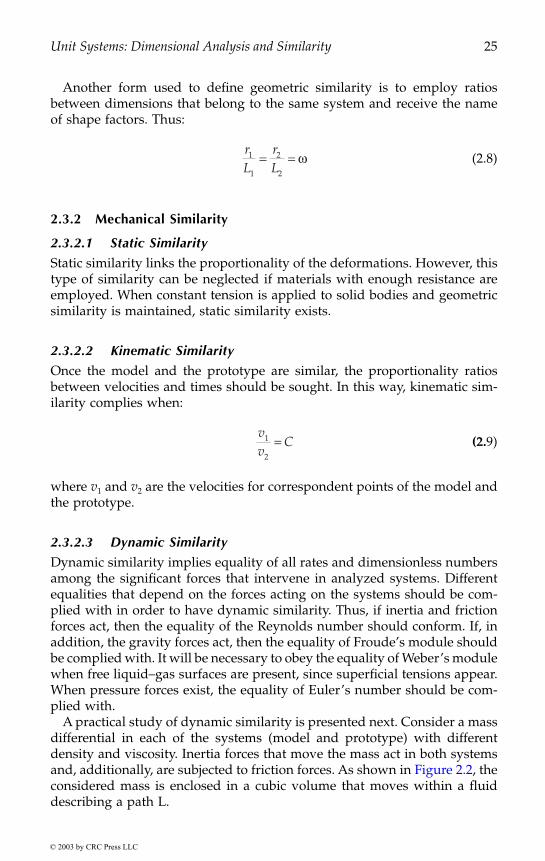
A practical study of dynamic similarity is presented next. Consider a massdifferential in each of the systems (model and prototype) with differentdensity and viscosity. Inertia forces that move the mass act in both systemsand, additionally, are subjected to friction forces. As shown in Figure 2.2, theconsidered mass is enclosed in a cubic volume that moves within a fluiddescribing a path L.
rL
rL
1
1
2
2
= = ω
vv
C1
2
=
TX69299 ch01 frame.book Page 25 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
26 Unit Operations in Food Engineering
Inertia forces are normal forces (Fn), hence:
(2.10)
The friction forces will be tangential and, according to Newton’s law:
(2.11)
where l is the length, A the area, and η the viscosity. For dynamic similarityto exist, then
or
(2.12)
since
(2.13)
FIGURE 2.2Movement of a mass within a fluid (a) and dynamic similarity (b).
L1
d m 1
r1
l1
L 2
d m 2
r2
l 2
a) b)
F
v dmr
v dVr
v dlrn = = =
2 2 2 3ρ ρ( )
F dA
dvdr
dldvdrt = = ( )η η
2
FF
FF
n
t
n
t
1
1
2
2
=
FF
FF
n
t
n
t
=
1 2
FF
v dl
rdl
dvdr
v dlr dv
dr
n
t
=( )
( )=
2 3
2
21 1ρ
η
ρ
η
TX69299 ch01 frame.book Page 26 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 27
Then:
Taking geometric and kinematic similarity ratios into account:
When substituting these relationships into the left-hand side of the lastequality, one can obtain:
but k = l1/l2, hence:
(2.14)
That is
which points out that the equality of Reynolds module conforms to themodel and prototype only when inertia and friction forces exist.
If, in addition, gravity forces act on the systems, then the obtained relationsare taken ((Re)1 = (Re)2), and the following equality is conformed:
(2.15)
Gravity force is defined as:
(2.16)
v dlr dv
dr
v dlr dv
dr
12
1 1
11
1
1
22
2 2
22
2
2
1 1ρ
η
ρ
η=
r l
l k l dl k dl
r k r dr k dr
v C v dv C dv v C v
i i
i j i j
i j i j
i j i j i j
=
= =
= =
= = =
ω
2 2
ρη
ρη
1 1
1
2 2
2
v k v=
ρη
ρη
1 1 1
1
2 2 2
2
v l v l=
Re Re( ) = ( )1 2
F F F Fn G n G( ) = ( )1 2
F gdm g dlG = = ( )ρ3
TX69299 ch01 frame.book Page 27 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
28 Unit Operations in Food Engineering
Considering Equations 2.10 and 2.16, the relationship between the inertiaand gravity forces will be defined by:
(2.17)
and since ri = ωli, the following relationship applies:
(2.18)
which indicates equality in the Froude’s module. It must be noted that gcannot be simplified, since a dimensional expression would be obtained.When there are gravity forces, the Froude’s modules of the model and theprototype are equal.
When surface tension forces (Fs) intervene, the new relationship to complywith is:
(2.19)
The surface tension forces are given by:
(2.20)
where σ is the surface tension. In this way:
(2.21)
from which the following equation is obtained:
(2.22)
Taking into account the geometric similarity relationships:
FF r g
n
G
=v2
vl g
vl g
12
1
22
2
=
F F F Fn s n s( ) = ( )1 2
F ls = σ
FF
v dlr l
n
s
=( )ρ
σ
2 31
ρσ
ρσ
1 12
1
3
1 1 1
2 22
2
3
2 2 2
1 1v dl
r l
v dl
r l( )
=( )
r l
l k l dl k dl
i i
i
=
= =
ω
2 1 2
TX69299 ch01 frame.book Page 28 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 29
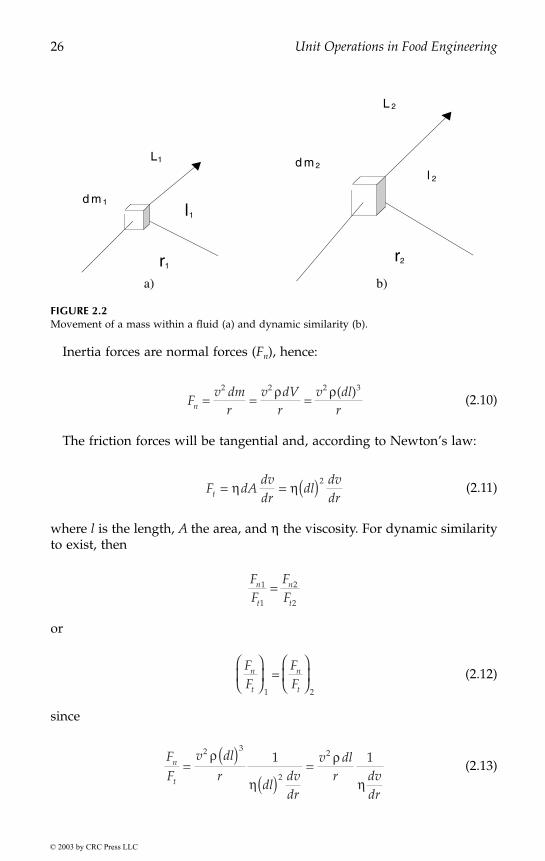
and substituting them into the last equality and simplifying it, the followingcan be obtained:
(2.23)
which indicates that the Weber’s modules are equal. That is, to have dynamicsimilarity when surface forces act, the Weber’s modules must coincide inthe model and prototype.
Finally, the case in which there are pressure forces due to pressure differ-ences is examined below. The new relation to be conformed with is:
(2.24)
The pressure forces are defined by:
(2.25)
Consequently:
(2.26)
The combination of Equations 2.24 and 2.26 gives:
(2.27)
and according to geometric similarity,
When substituting these in the last equality and then simplifying it, thefollowing can be obtained:
(2.28)
ρσ
ρσ
1 12
1
1
2 22
2
2
v l v l=
F F F FP N P N( ) = ( )1 2
F p lP = ∆ 2
FF
p lr
v dl
P
N
=( )
∆ 2
2 3ρ
∆ ∆p lr
v dlp l
r
v dl1 1
2 1
1 12
1
3 2 22 2
2 22
2
3ρ ρ( )
=( )
r w l
l k l dl k dl
i i=
= =1 2 1 2
∆ ∆p
v
p
v1
1 12
2
2 22ρ ρ
=
TX69299 ch01 frame.book Page 29 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
30 Unit Operations in Food Engineering
which indicates that there is equality in the Euler’s module. That is, whenthere is dynamic similarity, the Euler’s modules of the model and prototypecoincide.
Not all the forces described here are always present, so there will only bedynamic similarity in those equalities between the dimensionless modules ofthe model and prototype referring to the force or forces acting on the system.
Problems
2.1
A fluid food has a viscosity of 6 poises. Obtain the value for viscosity in theinternational system and in the absolute English system.
By definition, 1 poise is 1 g per cm and s: 1 poise = g/(cm ·s)
Conversion to the international system:
In the international system the viscosity unit is Pa ·s, that is equivalent tokg/(m ·s).
Conversion to the absolute English system:
2.2
Empirical equations are used, in many cases, to calculate individual heattransfer coefficients. Thus, the following expression may be used for thecirculation of water in a cylindrical pipe:
where:h = film coefficient in Btu/(h ·ft2 ·°F)vm = mean velocity of water in ft/sdi = interior diameter of the pipe in inches (in)t = water temperature in (°F)
Perform the adequate unit conversion so this equation can be used in theinternational system.
6g
cm.s1 kg10 g
100 cm1 m
0.6kgm.s
0.6 Pa.s3 = =
6g
cm.s1lb
453.5g30.48 cm
1ft0.403
lbft.s
=
h td
m
i
= +( ) ( )( )
160 1 0 010 8
0 2.
.
.
v
TX69299 ch01 frame.book Page 30 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 31
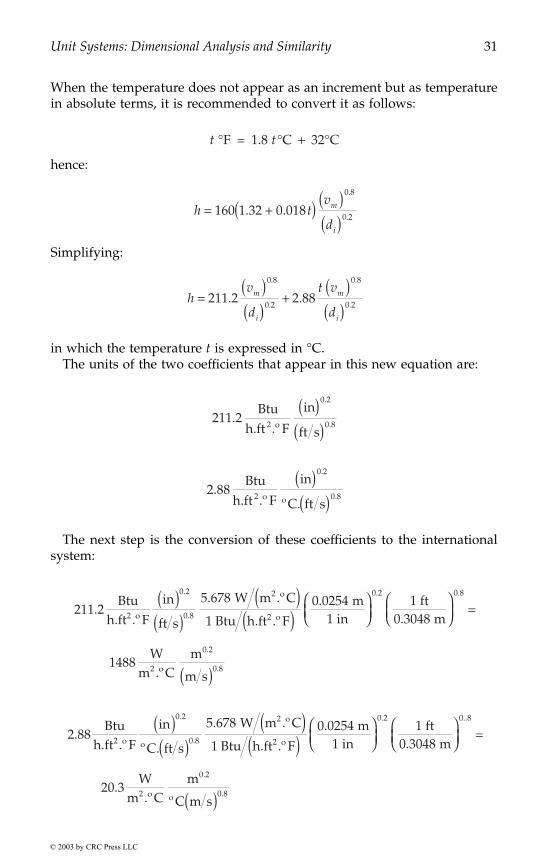
When the temperature does not appear as an increment but as temperaturein absolute terms, it is recommended to convert it as follows:
hence:
Simplifying:
in which the temperature t is expressed in °C.The units of the two coefficients that appear in this new equation are:
The next step is the conversion of these coefficients to the internationalsystem:
t t F = 1.8 C + 32 C° ° °
h tv
d
m
i
= +( ) ( )( )
160 1 32 0 0180 8
0 2. .
.
.
hv
d
t v
d
m
i
m
i
=( )( )
+( )( )
211 2 2 880 8
0 2
0 8
0 2. .
.
.
.
.
211.2Btu
h.ft .º F
in
ft s2
0.2
0.8
( )( )
2.88Btu
h.ft .º F
in
ºC. ft s2
0.2
0.8
( )( )
211.2Btu
h.ft .º F
in
ft s
5.678 W m .º C
1 Btu h.ft .º F
0.0254 m1 in
1 ft0.3048 m
1488W
m .º Cm
m s
2
0.2
0.8
2
2
0.2 0.8
2
0.2
0.8
( )( )
( )( )
=
( )
2.88Btu
h.ft .º F
in
º C. ft s
5.678 W m .º C
1 Btu h.ft .º F
0.0254 m1 in
1 ft0.3048 m
20.3W
m .º Cm
º C m s
2
0.2
0.8
2
2
0.2 0..8
2
0.2
0.8
( )( )
( )( )
=
( )
TX69299 ch01 frame.book Page 31 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
32 Unit Operations in Food Engineering
So the resulting equation is:
which, rearranged, gives:
with units: h in W/(m2 ·°C); vm in m/s; di in m; and t in °C.
2.3
Use a dimensional analysis to obtain an expression that allows the calculationof the power of a stirrer as a function of the variables that could affect it. Itis known, from experimental studies, that the stirring power depends on thediameter of the stirrer (D), its rotation velocity (N), the viscosity (η) anddensity (ρ) of the fluid being stirred, and the gravity acceleration (g).
The power of the stirrer, called P, can be expressed as a function of the othervariables: P = f(D, η, g, ρ, N)
Applying Rayleigh’s method:
The number of fundamental magnitudes is three: length (L), mass (M), andtime (T). The number of variables is six. Three equations with five unknownscan be obtained. The number of factors π will be: 6 – 3 = 3.
Mass (M): 1 = b + dLength (L): 2 = a – b + c – 3d
Time (T): –3 = – b – 2c – e
P D η g ρ N
M 1 0 1 0 1 0L 2 1 –1 1 –3 0T –3 0 –1 –2 0 –1
1 a b c d e
hv
d
t v
d
m
i
m
i
=( )( )
+( )( )
1488 20 30 8
0 2
0 8
0 2
.
.
.
..
h tv
d
m
i
= +( ) ( )( )
1488 1 0 013640 8
0 2.
. .
.
P K D g Na b c d e= η ρ
MLT
L M LT L T M L L T 3
2
30 2= ( ) ( ) ( ) ( )K a b c d e
TX69299 ch01 frame.book Page 32 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 33
Since there are three equations with five unknowns, two of them can befixed. If b and c are fixed, the other unknowns can be set up as a functionof b and c:
d = 1 – be = 3 – b – 2c
a = 2 + b – c + 3 – 3b = 5 – 2b – c
If a, d, and e are substituted in the equation in which power is a function ofthe different variables, one obtains:
The variables are grouped in such a way that they have the same exponent:
It can be observed that three dimensionless constants were obtained:
Power’s number:
Reynolds’ number:
Froude’s number:
The last number expresses the ratio of dynamic action to gravity action.In general, the power module can be expressed as a function of Reynolds
and Froude’s numbers, according to an expression of the type:
P K D g Nb c b c b b c= 5 2− − − − −η ρ1 3 2
P K D N N D DN gb c
= ( ) ( )− −5 3 2 2ρ ρ η
PN D
KN D D N
g
b c
ρρ
η
3 5
2 2
=
− −
Po
PN D
( ) =ρ 3 5
Re( ) =
ρη
N D2
FrD N
g( ) =
2
Po K Frm n
= ( ) ( )Re
TX69299 ch01 frame.book Page 33 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
34 Unit Operations in Food Engineering
2.4
When a fluid circulates through a pipe, mechanical energy losses occur dueto friction with the pipe walls’ mechanical energy losses by mass unit of thefluid (Ev), depending on the characteristics of the pipe (internal diameter,roughness, and length) and on the properties of the circulation fluid (densityand viscosity), as well as on the circulation velocity (v). Use Buckingham’smethod to deduce an expression that allows calculation of Ev as a functionof the mentioned variables.
The number of variables is seven, and the number of fundamental magni-tudes is three. Therefore, the number of dimensionless factors π is π = 7 – 3 = 4.
Energy losses due to friction can be expressed as a function of the remain-ing variables:
Writing all this information in matrix form gives:
Working with three variables that are fundamental, one establishes themin a way so as to obtain a matrix determinant different from zero. It isdetermined that the rank of the matrix is equal to three.
Factors π:
1. π1 = ρa (di)b vc Ev
The fundamental magnitudes are mass, length, and time:Mass (M): 0 = aLength (L): 0 = –3a + b + c + 2Time (T): 0 = –c – 2
When solving the system, the values obtained for a, b, and c area = 0; b = 0; c = –2. Hence, the factor π1 is π1 = Ev/v 2.
2. π2 = ρa (di)b vc lMass (M): 0 = aLength (L): 0 = –3a + b + c + 1Time (T): 0 = –c
When solving the system, the values obtained for a, b, and c area = 0; b = –1; c = 0. Hence, the factor π2 is π2 = l/di.
ρ di v l ε η Ev
M 1 0 0 0 0 1 1L –3 1 1 1 1 –1 2T 0 0 –1 0 0 –1 –2
a b c 1 1 1 1
E K d v lva
i
b c d e f= ( )ρ ε η
TX69299 ch01 frame.book Page 34 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 35
3. π3 = ρa (di)b vc εMass (M): 0 = aLength (L): 0 = –3a + b + c + 1Time (T): 0 = –c
When solving the system, the values obtained for a, b, and c area = 0; b = –1; c = 0. Hence, the factor π3 is π3 = ε/di.
4. π4 = ρa (di)b vc ηMass (M): 0 = a + 1Length (L): 0 = –3a + b + c – 1Time (T): 0 = –c – 1
When solving the system, the values obtained for a, b, and c are:a = –1; b = –1; c = –1. Hence, the factor π4 is π4 = η/(ρvdi) = (Re)–1.Since it is a dimensionless factor, its value is the Reynolds number:π4 = Re.
According to Buckingham’s π theorem, one of these dimensionless factorscan be expressed as a function of the other three factors. Therefore, it can bewritten that:
that is:
Rearranging:
It is known that mechanical energy losses per mass unit are proportional tothe length, so:
It is obtained that Ev is directly proportional to the squared velocity andto the length, and inversely proportional to the pipe diameter. Likewise, itdepends on a function φ′ that depends on the Reynolds number and the so-called relative roughness, ε/di.
π π π π1 2 3 4= ( )f , ,
ˆ, , Re
E
vld d
V
i i2
=
φ
ε
ˆ , , ReE vld dV
i i
=
2 φε
ˆ , ReE vld dV
i i
=
2 φε
TX69299 ch01 frame.book Page 35 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
36 Unit Operations in Food Engineering
Experimentation should be performed to complete this expression. How-ever, the function φ′ can be substituted by a factor f, called friction factor, insuch a way that the energy losses by friction could be obtained from:
where the factor f is a function of the Reynolds number and the relativeroughness.
2.5
One of the most frequently used devices for batch fermentations is the stirredtank. The power that should be applied to the stirrer (P) is a function of itsrotation velocity (N) and diameter (D), density (ρ) and viscosity of the sub-strate, gravity acceleration (g), and time (t) since the beginning of operation.Demonstrate, using Rayleigh’s and Buckingham’s methods, that the powermodule (Po) is a function of the Reynolds (Re) number, Froude’s (Fr) number,and time module (Nt), that is:
The modules (Po), (Re), and (Fr) are defined by the expressions:
The number of variables is seven, while the number of fundamental mag-nitudes is three; therefore, the number of dimensionless factors π is four.
Rayleigh’s Method
The power of the stirrer can be expressed in relation to function of the othervariables:
(2.6.1)
P N ρ η D g t
M 1 0 1 1 0 0 0L 2 0 –3 –1 1 1 0T –3 –1 0 –1 0 –2 1
1 a b c d e f
E f v
ldV
i
= 2
Po Fr Nt( ) = ( ) ( ) ( )[ ]Φ Re , ,
Po
PN D
D NFr
D Ng
( ) = ( ) = ( ) =ρ
ρη3 5
2 2
Re
P K N D g ta b c d e f= ρ η
TX69299 ch01 frame.book Page 36 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 37
Mass (M): 1 = b + cLength (L): 2 = –3b – c + d + eTime (T): –3 = –a –c –2e + f
Since three equations in six unknowns resulted, three of them should befixed. If c, e, and f are fixed, the other variables are set up as a function of c,e, and f:
b = 1 – cd = 5 – e – 2c
a = 3 – c – 2e + f
Substituting a, b, and d in Equation 2.6.1 leads to:
The variables are grouped in such a way that they have the same exponent:
therefore:
Taking into account the definitions of the power, Reynolds, and Froude’smodules, this expression is converted into (Po) = K (Re)–c (Fr)–e (Nt)f or (Po) =Φ[(Re), (Fr), (Nt)], which is the focus of this research.
Buckingham’s Method
The matrix of the exponents is formed:
P N D g ρ η tM 1 0 0 0 1 1 0L 2 0 1 1 3 –1 0T –3 –1 0 –2 0 –1 1
MLT
T M L M LT L L T T3 22
30 1= ( ) ( ) ( ) ( ) ( ) ( )K
a b c d e f
P K N D g tc e f c c c e f= − − + − − −3 2 1 5 2 3ρ η
P K D N ND g DN Ntc e f
= ( ) ( ) ( )5 3 2 2ρ η ρ
PN D
K N D DN g Ntc e f
ρρ η
3 52 2= ( ) ( ) ( )− −
TX69299 ch01 frame.book Page 37 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
38 Unit Operations in Food Engineering
One looks for the rank of the matrix, which can be a maximum of three.There is a determinant different from zero, formed by the columns N, D, and ρ:
Therefore, the rank of the matrix is three. N, D, and ρ are chosen as funda-mental variables.
The dimensionless factors π are determined one by one: π1 = Na ρb Dd P
Mass (M): 0 = b + 1Length (L): 0 = d – 3b + 2Time (T): 0 = –a – 3
When solving this system, one obtains b = –1; d = –5; a = –3, so thedimensionless factor π1 is:
π2 = Na ρb Dd η
Mass (M): 0 = b + 1Length (L): 0 = d – 3b – 1Time (T): 0 = – a – 1
When solving this system, one obtains b = –1; d = –2; a = –1, so the dimen-sionless factor π2 is:
π3 = Na ρb Dd g
Mass (M): 0 = bLength (L): 0 = d – 3b + 1Time (T): 0 = –a – 2
N D ρ0 0 1
Det 0 1 –3 = 1–1 0 0
N D ρ P η g tM 0 0 1 1 1 0 0L 0 1 –3 2 –1 1 0T –1 0 0 –3 –1 –2 1
a d b 1 1 1 1
π
ρ1 3 5=
PN D
πη
ρ2 2 2=
N D
TX69299 ch01 frame.book Page 38 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 39
When solving this system, one obtains b = 0; d = –1; a = –2, so the dimen-sionless factor π3 is:
π4 = Na ρb Dd t
Mass (M): 0 = bLength (L): 0 = d – 3b
Time (T): 0 = –a + 1
When solving this system, one obtains b = 0; d = 0; a = 1, so the dimen-sionless factor π4 is:
Applying Buckingham’s theorem, π1 = F(π2, π3, π4); hence, (Po) = Φ[(Re),(Fr), (Nt)], which is the focus of this research.
2.6
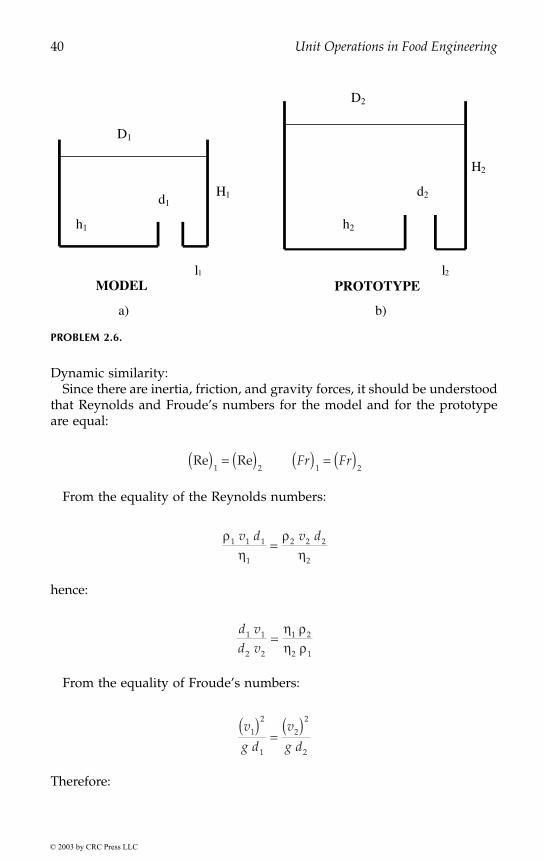
A cylindrical 5-m diameter tank that stores concentrated juice (54°Brix) hasa 20-cm diameter drainage, placed 50 cm away from the lateral wall of thedeposit, and a nozzle 10 cm above the bottom of the tank. When drainingthe tank, a vortex is formed in such a way that when the liquid level is nothigh enough, the vortex can reach the outlet pipe, and air can be drawn offtogether with the juice. The tank should operate at a draining flow of 20 m3/s.With the purpose of predicting what should be the minimum level of juicein the tank to avoid the vortex reaching the drainage, a study is to be per-formed with a reduced scale model that will operate with water. Determinethe dimensions the model should have, as well as the operation conditions.
Data: It may be supposed that the shape of the vortex depends only onthe draining rate and the quantity of liquid in the tank.
Properties of the juice: density 1250 kg/m3, viscosity 50 mPa ·s
H2 is the level of the juice in the tank required for the vortex not to reach thedrainage. Subscript 1 indicates model and subscript 2 indicates the prototype.
Geometric similarity:
π 3 2
=g
N D
π 4 = Nt
d
d
D
D
l
l
h
h
H
Hk1
2
1
2
1
2
1
2
1
2= = = = =
TX69299 ch01 frame.book Page 39 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
40 Unit Operations in Food Engineering
Dynamic similarity:Since there are inertia, friction, and gravity forces, it should be understood
that Reynolds and Froude’s numbers for the model and for the prototypeare equal:
From the equality of the Reynolds numbers:
hence:
From the equality of Froude’s numbers:
Therefore:
PROBLEM 2.6.
d1
h1
D1
H1
l1MODEL
h2
d2
H2
D2
l2PROTOTYPE
a) b)
Re Re ( ) = ( ) ( ) = ( )1 2 1 2
Fr Fr
ρη
ρη
1 1 1
1
2 2 2
2
v d v d=
d vd v
1 1
2 2
1 2
2 1
=η ρη ρ
v
g d
v
g d1
2
1
2
2
2
( )=
( )
TX69299 ch01 frame.book Page 40 Wednesday, September 4, 2002 2:13 PM

© 2003 by CRC Press LLC
Unit Systems: Dimensional Analysis and Similarity 41
When combining the obtained expressions:
Rearranging:
From the data given in the problem and from the properties of water:
it is obtained that the geometric similarity ratio is k = d1/d2 = 0.0855.This factor allows us to obtain the dimensions of the model:
d1 = k ·d2 = 0.0855 ·0.2 m = 0.017 mh1 = k ·h2 = 0.0855 ·0.1 m = 0.0085 mD1 = k ·d2 = 0.085 ·5 m = 0.428 ml1 = k ·l2 = 0.0855 ·0.5 m = 0.0428 m
Volumetric flow (q) is the product of the linear velocity (v) times the cross-sectional area (S). Since it is expressed as a function of the diameter of thepipe:
so the flow rate between the model and the prototype will be:
vv
d d1
21 2
1 2= ( )
d d
d d
1 1
1 2
2 2
1 21 2
2 1
( )( )
=η ρη ρ
dd
1
2
1 2
2 3
2 1
2 3=
( )( )η ρ
η ρ
η ρ
η ρ
1 1
2 2
1 1000
50 1250
= ⋅ =
= ⋅ =
mPa s kg m
mPa s kg m
3
3
q v S v d= =
π4
2
v d
v dd d k1
2
1 1
2
2 2
2 1 2
5 2 5 2=( )( )
= ( ) =
TX69299 ch01 frame.book Page 41 Wednesday, September 4, 2002 2:13 PM
© 2003 by CRC Press LLC
42 Unit Operations in Food Engineering
Therefore, the volumetric flow to drain the model is:
The minimum level of the liquid in the tank can be expressed as a functionof the level in the model, from the value of geometric similarity rate:
The value of H1 can be experimentally obtained in the laboratory, workingwith the model. Then, with H1 value, it is possible to obtain the value of H2,which is the minimum height the juice should reach in the prototype so thatthe vortex does not reach the drainage pipe.
q k q15 2
2
5 2 30 0855 20 0 0428= = ( ) ( ) =. .m s m s3
H H k H H2 1 1 10 0855 11 7= = =. .
TX69299 ch01 frame.book Page 42 Wednesday, September 4, 2002 2:13 PM

![Synthesis of Novel Electrically Conducting Polymers: Potential ... · PPh3 + Br(CH2). CO2Me ..... > [Ph3P--CH2(CH2). i CO2Me]*Br* [phaP--CH2(CH2)n__CO2Mel*Br -Z--BuL>_phaP=CH (C H2)n_i](https://img.pdfslide.us/doc/110x75/5ebc39ab077be8135d1c1d2a/synthesis-of-novel-electrically-conducting-polymers-potential-pph3-brch2.jpg)