Embed Size (px)
Citation preview

ASVLite: a high-performance simulator for autonomous surface vehicles
Toby Thomas , David M. Bossens and Danesh Tarapore
Abstract— The energy of ocean waves is the key distinguish-ing factor of marine environments compared to other aquaticenvironments such as lakes and rivers. Waves significantly affectthe dynamics of marine vehicles; hence it is imperative toconsider the dynamics of vehicles in waves when developing effi-cient control strategies for autonomous surface vehicles (ASVs).However, most marine simulators available open-source eitherexclude dynamics of vehicles in waves or use methods withhigh computational overhead. This paper presents ASVLite, acomputationally efficient ASV simulator that uses frequencydomain analysis for wave force computation. ASVLite is suit-able for applications requiring low computational overhead andhigh run-time performance. Our tests on a Raspberry Pi 2 anda mid-range desktop computer show that the simulator hasa high run-time performance to efficiently simulate irregularwaves with a component wave count of up to 260 and large-scaleswarms of up to 500 ASVs.
I. INTRODUCTION
Autonomous surface vehicles (ASVs), also known asunmanned surface vehicles (USVs), are vessels that operateon the surface of the water without any crew. A rapidly ex-panding market, driven by scientific, commercial and militaryinterests, has resulted in ASVs been successfully deployedin a wide variety of missions ranging from environmentalmonitoring of oceanic waters to inspecting offshore maritimestructures and performing security and patrol operationsin coastal waters [1], [2]. Importantly, swarms of thesevessels have the potential to provide a high degree of spatio-temporal situational awareness of rapidly evolving marineand maritime disturbances occurring across large areas [3].
An essential tool required for the design and developmentof ASVs for oceanic environments is a vehicle dynamicssimulator [4]. However, to the best of our knowledge, currentopen-source vehicle dynamics simulators for this domain areprimarily designed for underwater vehicles. These do notsimulate irregular ocean waves and the dynamics of vehiclesin waves while waves may have a significant impact on thedynamic positioning and manoeuvrability of an ASV [5].Moreover, wave forces also need to be accounted for whendesigning coordination strategies for swarms of ASVs, forinstance, to synchronise long-range low-latency line-of-sightcommunication links between vehicles in a swarm.
Computing wave forces on an ASV has a significant com-putational overhead. Wave forces are computed by integrat-ing the wave pressure along the wetted hull surface, which iscomputed as the intersection of geometries representing thehull surface and the instantaneous sea surface. This approachrequires extensive computations due to approximating a
Authors are with the School of Electronics and Computer Science,University of Southampton, SO17 1BJ Southampton, U.K.
surface integral and computing the geometric intersectionsof 3D objects. The computational overhead is even higherwhen simulating individual vehicles of a swarm due tothe increased number of hull surfaces and the larger oceansurface encompassed by the entire swarm.
One method to reduce computation is to simplify thehull geometry to an equivalent bounding box [6] or todivide the hull into smaller segments and assume a constantwaterline for each segment [7]. An alternative method toreduce computation and improve performance is to use acombination of (i) clustering of neighbouring facets overwhich wave forces are computed, (ii) parallelisation of waveforce computation across these clusters, and (iii) a reductionin the number of instances the wave force computation isrepeated in the simulation [8].
A common thread in the above heuristics is the following:(i) the use of time-domain analysis for computing waveforces on the vehicle, i.e., integrating the wave pressure onthe wetted hull surface at each time step of the simulation;and (ii) the use of a simplified hull mesh to reduce compu-tational expense. However, simplifying the hull mesh alonedoes not provide a scalable solution; for example, whensimulating individual vehicles of a swarm, the gains fromreducing the complexity of each hull are negated by thehigher number of hulls and the larger ocean surface to besimulated. While parallelisation may reduce the computationtime, it does not reduce the computation itself, and high-degrees of parallelisation may not be supported onboardsmall-sized low-cost marine vehicles.
This paper describes ASVLite, a high-performance sim-ulator which uses frequency-domain analysis to simulatethe dynamics of an ASV in ocean waves while accountingfor the effects of winds and currents. Instead of improvingperformance by simplifying the geometry of the vehicle,frequency-domain analysis takes advantage of the modelof the irregular ocean waves to achieve high performance.Irregular ocean waves are modelled as a linear superpositionof several regular component waves, and we assume thateach regular component wave induces a periodic force onthe ASV. The net force on the ASV is the superpositionof the periodic forces induced by the component waves.The force induced by each component wave is computed byintegrating the wave pressure along the hull and is reducedto a cosine function of the vehicle’s position and time.Frequency-domain analysis delivers high performance be-cause the computationally intensive operation of integratingthe wave pressure along the wetted hull surface is performedonly once per component wave, whereas in time-domainanalysis the computation is repeated at each time step of
arX
iv:2
003.
0459
9v2
[cs
.RO
] 1
3 A
pr 2
021

the simulation.ASVLite computes wave forces on the marine surface
vehicle in two stages. The first stage computes wave forceson the vehicle for each component wave, and the secondstage computes the net wave force on the vehicle by summingthe instantaneous values of the cosine functions. Dividingthe computation into two stages provides opportunities toreduce the computational overhead and improve run-timeperformance. The first stage of computation, which has ahigher computational overhead, is performed before simula-tion of vehicle dynamics, thereby reducing the computationat run-time. Also, the performance of ASVLite becomesindependent of the complexity of the vehicle’s hull meshsince the number of cells in the geometry only affects thecomputations in the initial phase. Such splitting of computa-tion into two phases also makes ASVLite ideal for simulationonboard an ASV since the first stage can be performed on acomputer with higher computational capacity, and the resultscan be used for running the second stage on the ASV’sonboard computer.
When simulating a swarm of ASVs, ASVLite takes ad-vantage of multiple CPU cores, when available, by multi-threading the computation for each ASV on parallel threads.ASVLite has been implemented with a clear and simpleprogramming interface written in C programming language,making it easy to integrate with any existing or future soft-ware. The low run-time overhead of ASVLite makes it idealfor applications such as onboard simulations for behaviouraladaptation through trial and error, and for applications thatrequire high run-time performance such as in the simulationof a swarm of ASVs.
II. RELATED WORK
We consider the following features as essential in amarine vehicle simulator: (i) ability to simulate realisticocean waves corresponding to a meteorologically given seastate; (ii) ability to simulate vehicle dynamics in wavesin all six degrees of freedom; and (iii) low computationaloverhead to provide high run-time performance and to enableapplications onboard the vehicle. In this section, we reviewexisting open-source marine vehicle simulators consideringthese features.
UWSim [9] is a well-referred open-source hardware-in-the-loop simulator and provides a wide range of sensor mod-ules and realistic rendering of the underwater environment.However, the hydrodynamic forces are computed outsidethe simulator in a MATLAB module, and therefore thesimulator has a poor run-time performance. USVsim [7] isbased on UWSim [9] and provides additional features suchas simulating forces due to wind, water current and waves.However, the wave force computation in USVsim is limitedto hydrostatic forces, ignoring the hydrodynamic forces dueto waves.
UUV Simulator [10] and MARS [11] were primarilydeveloped for the simulation of underwater vehicles, butare also suitable for the simulation of a swarm of vehicles.Whereas UUV Simulator does not compute wave forces
following the assumption that the vehicle operates outsidethe wave zone, MARS computes forces due to waves andwater currents, but the wave force computation is limited tohydrostatic forces.
Kelpie [6] was developed for testing control algorithmsfor multi-robot systems of ASVs and aerial vehicles. Kelpiesimulates ocean waves as regular waves since the simulatorwas developed with the assumption that irregular waves arenot necessary for testing control algorithms. This assumptionhas been contradicted in Paravisi et al. [7], where accuratemodelling of natural disturbances is considered essential,especially for small vehicles with low inertia, for developingefficient guidance, navigation, and control strategies. Also,the wave force computation in Kelpie is limited to hydrostaticforces. The source code of the simulator is not publiclyavailable.
Unlike the other simulators that we reviewed, the simulatordeveloped by Thakur et al. [8] can accurately simulatedynamics of an ASV in irregular ocean waves consideringboth the hydrostatic and hydrodynamic forces due to thewaves. Although various heuristics were proposed to improvethe run-time performance, the use of time-domain analysisfor computing wave forces still makes the simulator com-putationally expensive and not suitable for achieving highrun-time performance.
In summary, most marine vehicle simulators either ig-nore waves forces or limit the wave force computation tohydrostatic forces, ignoring the hydrodynamic forces dueto waves. Although works such as that of Thakur et al.[8] model vehicle dynamics in waves, these models employtime-domain analysis for computing wave forces, a computa-tionally expensive procedure repeated at each and every timestep of the simulation, and thus are not suitable for achievinghigh run-time performance.
III. METHODOLOGY
Here we propose a method for realistic simulation ofocean waves and their impact on ASVs. In ASVLite, theirregular ocean surface is modelled as a linear superpositionof several regular waves with varying amplitude, frequency,and heading. This follows, to some extent, the earlier workin the realistic rendering of ocean waves [12], [13]. To modelthe vehicle dynamics in waves, we assume that each regularcomponent wave induces a periodic force on the ASV andthe net wave force, Fw, on the vehicle at any instant of timeis the linear superposition of forces due to each componentwave.
In ASVLite, the entire computation is divided into twophases. The first phase computes the properties of all com-ponent waves (amplitude, frequency, wave heading, phase)and the amplitude of the periodic force that each componentwave exerts on the ASV’s hull. The second phase computesthe acceleration, velocity and position of the ASV by solvingthe equations of rigid body dynamics. Section III-A gives anoverview of the governing equation of rigid body dynamicsof an ASV, and Section III-B details the computation of

ocean waves and the force that they exert on an ASV basedon frequency-domain analysis.
A. Dynamics of marine vehicle
The simulator computes the displacement, velocity andacceleration of the vehicle in 6 DoF for each time step basedon the equations of rigid body dynamics:
(M+MA)a+C(v)v+K∆x = FP +FE , (1)
where (M+MA)a is the inertia force, M is the mass matrix,MA is the added mass matrix, and a is the accelerationvector. The added mass is computed using an empiricalformula [14], assuming the hull shape as equivalent to anelliptical cylinder with a length of major axis equal to thelength at waterline, length of minor axis equal to breadth atwaterline and height of cylinder equal to the floating draughtof the vehicle. C(v)v is the hydrodynamic damping force,C(v) is the damping matrix, and v is the velocity vector.The hydrodynamic damping force acting on the vehicle isthe sum of potential damping due to radiated wave, linearviscous damping due to skin friction and quadratic drag.At low speed (below 2 m/s), the potential damping andlinear viscous damping is negligibly small and hydrodynamicdamping can be considered equal to quadratic drag ([15],pp.126-130). The drag force on the vehicle is computedbased on an empirical formula [14], assuming hull geometryequivalent to an elliptical cylinder. K∆x is the hydrostaticrestoring force, K is the hydrostatic stiffness matrix, and ∆x isthe displacement from the equilibrium floating attitude. Theexcitation force acting on the vehicle FP+FE is computed asthe resultant of propeller force, FP, and environmental force,FE , which is the sum of the forces due to wave, wind andcurrent. Fw is the wave force acting on the vehicle, and itscomputation is described in detail in section III-B.
The instantaneous acceleration a(t) of the vehicle at timestep t is computed from Eq. 1. The velocity v(t) and positionx(t) of the vehicle are then computed by forward integrationwith a fixed time step size of ∆t.
B. Computing wave forces
1) Modelling ocean waves: The irregular sea surface isconsidered a superposition of many regular waves and thestate of the sea is defined using the Pierson-Moskowitzspectrum ([16], pp. 545-546), which is a single parameterspectrum based on wind speed as input and provides thecorrelation between wave frequency f and variance S( f ), orwave energy ([17], p. 14). The Pierson-Moskowitz spectrumis defined as:
S( f ) =Af 5 e
−Bf 4 , (2)
where A = αg2(2π)−4, B = β (2πUg )−4, α = 8.10× 10−3,
β = 0.74, and U is the wind speed in m/s measured at aheight of 19.5 m above the surface.
The Pierson-Moskowitz spectrum is a point spectrum,which represents a sea where all waves head in a singledirection, and using it would simulate an irregular sea surfacethat is infinitely long crested. The sea is short crested because
waves move in many different directions. Consequently,ASVLite converts the point spectrum to a directional spec-trum using the ITTC-recommended spreading function ([18],p. 4-29):
G(µ) =
{2π
cos2(µ), if (θ − π
2 )≤ µ ≤ (θ + π
2 )
0, otherwise, (3)
where θ is the wind direction measured with respect togeographic North. The equation for the resultant directionalspectrum is:
S( f ,µ) = S( f )G(µ) . (4)
For ASVLite, the continuous wave spectrum is convertedto a discrete spectrum with frequency bands of uniformwidth and frequencies ranging from the minimum thresh-old frequency, f0.1, to the maximum threshold frequency, f99.9. The minimum and maximum threshold frequenciesfor Pierson-Moskowitz spectrum are computed as per ITTCrecommendations as ([16], pp.545-546):
f0.1 = 0.652 fp , and f99.9 = 5.946 fp , (5)
where fp = ( 4B5 )
14 is the peak spectral frequency.
The discrete direction spectrum is used to generate alist of regular waves such that each frequency band in thespectrum represents a regular wave, and the area of the bandin the spectrum is equal to the variance of the regular wave.Amplitude, ζa, of the regular wave can be computed fromits variance, S( f ), as ([17], p.12):
ζa =√
2S( f ) . (6)
Wave elevation for a regular wave at position (x,y) at timet is computed as:
ζ (x,y, t) = ζa cos[k(xsin µ + ycos µ)−ωt + ε] , (7)
where ζa is the wave amplitude, ω is the circular frequency,k = ω2
g is the wave number, µ is the wave heading and ε thephase angle. The sea surface elevation at any instant of timeis the sum of elevations of all regular component waves andis computed as:
z(x,y, t) = ∑i(ζa)i cos[ki(xsin µi + ycos µi)−ωit + εi] . (8)
The process to generate the component waves based on wavespectrum is described in Algorithm 1.
2) Computation of wave force due to an irregular sea:The wave force on the vehicle is the sum of the Froude-Krylov force and the diffraction excitation force. The Froude-Krylov force is due to the pressure variation around the hulldue to the wave and the diffraction excitation force is dueto the modification of the incident wave due to presenceof the vehicle. The diffraction excitation force is negligiblysmall due to the relatively small size of an ASV, whichis on the order of 10 m or less, compared to wavelength,which is on the order of 100 m; therefore, the wave forceis approximated equal to Froude-Krylov force ([17], p. 43).The Froude-Krylov force on the vehicle due to the irregular

Algorithm 1 Algorithm to generate the component waves.Define U // wind speed in m/s.Define θ // wind direction in radians.g← 9.81 // acceleration due to gravity in m/s2.α ← 8.10 ·10−3 // as per Eq. 2.β ← 0.74 // as per Eq. 2.A← αg2(2π)−4 // as per Eq. 2.B← β (2π
Ug )−4 // as per Eq. 2.
fp← ( 4B5 )
14 // as per Eq. 5.
f0.1← 0.652 fp // as per Eq. 5.f99.9← 5.946 fp // as per Eq. 5.waves← new 2D array // array for component waves.Define n f // number for frequency bands.Define nµ // number of heading directions.∆ f ← f99.9− f0.1
n f∆µ ← π
nµ
for µ in range (θ − π
2 ) to (θ + π
2 ) dofor f in range f0.1 to f99.9 do
S← ( Af 5 e
−Bf 4 )( 2
πcos2(µ))∆ f ∆µ // as per Eq. 4.
ζa←√
2S // as per Eq. 6.ε← random number in range [0,360] generated froma uniform distribution.// Generate and insert a regular wave in waves.waves.insert wave(amplitude = ζa, f requency = f ,heading = µ , phase = ε)
end forend for
ocean surface, Fw, is computed as the sum of the Froude-Krylov force due to each component wave Fwi :
Fw = ∑i
Fwi . (9)
Fwi is computed by integrating the product of wave pressurewith the wetted hull surface area, dS, as:
Fwi =∮
Spi(z)dS . (10)
pi(z) is the wave pressure at depth z, defined as:
pi(z) = ρgekz cos[k(xsin µ + ycos µ)−ωeit] , (11)
where ωe is the encountered wave frequency and is computedas:
ωe = ω− ω2
gU cos(µ−φ) . (12)
Since the vehicle dimensions are much smaller than thewavelength, it is reasonable to assume the wave pressurewithin the limits of the vehicle to vary linearly. Consequently,Eq. 10 for the wave forces acting on a marine vehicle in 6
(a) Side view.
(b) Top view.
(c) Thruster configuration.
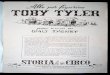
Fig. 1. Illustration of the SMARTY platform simulated.
DoF can be simplified as:
Fwi =
Fwsurge,i
Fwsway,i
Fwheave,i
Fwroll,i
Fwpitch,i
Fwyaw,i
=
(p f ore,i− pa f t,i)Ax(psb,i− pps,i)Ay
pcog,iAz
(psb,i− pps,i)Az2
B4
(p f ore,i− pa f t,i)Az2
B4
(p f ore,i− pa f t,i)Ay2
L4
(13)
where pcog is the wave pressure at the centre of gravity ofthe ASV, pa f t and p f ore are wave pressure at a distance of L
4from the centre of gravity of the ASV measured towards theaft and fore respectively, and psb and pps are wave pressureat a distance of B
4 from the centre of gravity of the ASVmeasured towards the starboard side and port side. Az is thewaterplane area of the vehicle, Ax is the transverse sectionalarea of the vehicle below the waterline at a distance of L
4from the centre of gravity, and Ay is the longitudinal profilearea of the ASV below the waterline at a distance of B
4 fromthe centre of gravity.
IV. RESULTS
A. Validation of vehicle dynamics simulated with ASVLite
ASVLite was validated by comparing simulation resultswith data generated from running a remote-operated vehicle,SMARTY, in a towing tank capable of generating waves.SMARTY has a cylindrical shape and is equipped with fourthrusters, as shown in Fig. 1, with physical specificationsshown in Table I. A summary of the validation is presentedfor a wave of amplitude 6 cm in Table II. Not all theexperimental details, such as the mass distribution and initialconditions, could be mimicked; however, we can confirm thatthe range of motion is of the same order.
To investigate vehicle motion trends, we simulatedSMARTY to move forward for 50 m in an open sea,

TABLE IPHYSICAL PARAMETERS OF THE SMARTY PLATFORM.
Diameter 0.32 m Height 0.21 mMass 8.4 kg Draught 0.11 m
Thrusters BlueRobotics T100 Thruster
TABLE IICOMPARISON OF HEAVE, ROLL AND PITCH MOTION OF SMARTY IN A
TOWING TANK WITH THE SIMULATED MOTION IN ASVLITE FOR A WAVE
OF AMPLITUDE 6 CM.
SMARTY Towing tank ASVLitemotion Minimum Maximum Minimum Maximum
Heave (cm) -6.8 6.8 -7.8 7.6Roll (deg) -17.2 8.9 -13.5 14.8Pitch (deg) -11.5 9.7 -4.1 12.3
while varying each of significant wave heights and waveheadings in separate and independent experiments. Thesignificant wave heights (in m), and wave headings wereof {0.5,0.625,0.75 . . .2.0} and {0◦,11.25◦,22.5◦ . . .360◦},respectively. Each experiment was replicated 100 times withdifferent random seed values. Therefore, in total, 42900(13 significant wave heights × 33 wave headings × 100replicates) experiments were performed. In each experiment,forward motion was generated by applying a constant forceof 4 N, while constraining yaw motion to achieve a constantwave heading. The vehicle was simulated with a fixed timestep size of 40 ms.
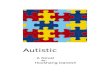
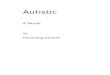
Fig. 2 shows the vehicle motion trends observed byplotting the mean of significant motion amplitudes for eachcombination of significant wave height and wave heading.As expected in a sea-going vessel, the heave motion of thesimulated vehicle increased with an increase in wave height.However, the roll and pitch amplitude at first increasedand then decreased with an increase in wave height; thisis because as the sea state increases from calm to high,the spectral peak of the ocean waves moves towards alower frequency. The waves become higher but also longer,making the waves less steep. Unlike heave motions of sea-going vessels, the simulated heave motions do not show anycorrelation with the wave heading, but this is due to thecircular waterline of the simulated SMARTY platform. Bycontrast, the roll and pitch motions show a strong correlationwith the wave heading. The pitch motion is highest in thehead sea condition (wave heading at 180◦), followed by thefollowing sea condition (wave heading at 0◦ or 360◦) andlowest in the beam sea condition (wave heading at 90◦ or270◦). The roll motion is highest in the beam sea conditionand lowest in the head sea and following sea condition.In summary, the above noted trends of the dynamics ofthe simulated vessel exhibit characteristics similar to thatobserved of sea-going vessels in waves, thus demonstratingthe high fidelity of ASVLite.
B. Analysis of performance of ASVLite
Experiments were also performed to estimate the perfor-mance of the ASVLite simulator. Performance is measured
as the time required for completing the simulation and isexpressed as the ratio of real-time to simulation-time. Real-time is the time taken for the vehicle dynamics in the realworld, and simulation-time is the time taken to completethe same dynamics in simulation. The experiments were runon a desktop computer, having a quad-core Intel Core i7-6700 CPU and 16GB of DDR4 2133MHz RAM, and on aRaspberry Pi 2, having a 900MHz quad-core ARM Cortex-A7 CPU and 1GB RAM.
The two key variables that influence the performance ofASVLite are the number of wave components used to gen-erate the irregular sea surface and the size of the simulatedswarm. Therefore, the forward motion experiments on theSMARTY platform were repeated while independently vary-ing these two variables to assess their impact on performance.For all experiments, the simulation time step size was fixedat 40 ms, and the number of replicates was 100.
In the first set of experiments, with a single vehicle,the number of wave components was varied to observe itseffect on performance (see Table III). It is expected that ahigher number of component waves while costly to simulate,defines a more realistic sea-surface with better short-crestedwaves. Our results indicate that ASVLite is capable ofproviding a high performance even with a larger number ofcomponent waves than recommended (75 wave componentswith 15 frequency bands per wave direction, see [17], p.13).When simulating with 75 component waves, the simulatorperformed 618x and 26x faster than real-time on the desktopcomputer and Raspberry Pi 2 platform respectively.
In the second set of experiments, the performance of thesimulator was tested by simulating marine vehicle swarms ofvarying size, while fixing the number of wave componentsat 75 (see Table IV). Simulations were performed usingthe following: (A) single-threading of the entire simulationprocess; (B) multi-threading with time synchronisation –useful when simulating a tightly-coordinated swarm of ASVsor for visualising the resulting behaviour of the simulatedswarm; and (C) multi-threading without time synchronisation– useful when the ASVs in the swarm act largely indepen-dently of each other. Results from running ASVLite on thedesktop indicate that the simulator can perform 280x fasterthan real-time when simulating a swarm of 10 vehicles, withthe performance reducing to 7x for a large swarm of 500vehicles. On the Raspberry Pi 2, the simulator performed10x faster than real-time for a swarm of 10 vehicles andperformed approximately at real-time speed when simulatinga swarm of 100 vehicles.
V. CONCLUSION AND FUTURE WORKS
ASVLite achieves high run-time performance by usingfrequency-domain analysis for simulating the dynamics ofthe vehicle in waves. Its two-stage computation, with thewave force computation in the first stage, reduces the compu-tational overhead during the simulation of vehicle dynamics,which is in the second stage, thereby resulting in high run-time performance independent of the complexity of the hullmesh geometry. Furthermore, ASVLite takes advantage of

(a) Heave motion trends. (b) Pitch motion trends. (c) Roll motion trends.
Fig. 2. Simulated motion trends of SMARTY in an open sea for 13 different significant wave heights and 33 different wave heading angles, averagedover 100 replicates. A wave heading of 180◦ corresponds to a head sea condition.
TABLE IIIRUN-TIME PERFORMANCE OF ASVLITE AVERAGED OVER 100
REPLICATES, ON A DESKTOP COMPUTER AND ON A RASPBERRY PI 2,FOR DIFFERENT NUMBER OF REGULAR WAVE COMPONENTS OF THE
IRREGULAR SEA SURFACE.
Component wave count Performance(wave directions × (real-time / simulation-time)frequency bands) Desktop Raspberry Pi 2
15 (3×5) 3266x 132x30 (3×10) 1648x 68x75 (5×15) 618x 26x
135 (9×15) 342x 15x195 (13×15) 237x 10x260 (13×20) 178x 8x
TABLE IVRUN-TIME PERFORMANCE OF ASVLITE AVERAGED OVER 100
REPLICATES, ON A DESKTOP COMPUTER AND A RASPBERRY PI 2, FOR
SIMULATION OF A SWARM OF ASVS USING (A) SINGLE-THREADING,(B) MULTI-THREADING WITH TIME SYNCHRONISATION, AND (C)
MULTI-THREADING WITHOUT TIME SYNCHRONISATION. SIMULATION
OF SWARMS OF OVER 150 ASVS WERE NOT PERFORMED ON THE
RASPBERRY PI 2 AS THE SIMULATION-TIME FAR EXCEEDED REAL-TIME.
PerformanceNumber of ASVs (real-time / simulation-time)
in simulated swarm Desktop Raspberry Pi 2A B C A B C
10 67x 150x 280x 3x 7x 10x50 14x 44x 64x 1x 2x 2x
100 7x 23x 32x 0.3x 1x 1x150 5x 16x 22x 0.2x 0.6x 0.7x200 3x 12x 16x - - -250 3x 9x 13x - - -500 1x 5x 7x - - -
multi-threading when simulating a large swarm of ASVswhere the simulation of each ASV runs in a parallel thread.
ASVLite is implemented based on the assumption that theirregular sea surface is composed of many regular wavesand the net wave force at any instant of time is a linearsummation of wave force due to each component wave. Thewave pressure variation along the hull is approximated aslinear due to the relatively small size of an ASV, on theorder of 10 m or less, compared to the sea wave lengths,
on the order of 100 m or more. These assumptions holdfor most use cases of current ASVs which are slow-movingdisplacement vessels with speeds less than 10 knots andoperating predominantly in mild sea conditions. High-speedsimulation with high fidelity of non-linear systems such asthe dynamics of a high-speed planning craft or sea stateswith wave breaking is currently not possible with ASVLitebut may be achieved in future work by combining it withcomputational fluid dynamics (CFD) based approaches.
VI. SUPPLEMENTARY INFORMATION
The simulator is publicly available as open-source athttps://github.com/resilient-swarms/ASVLite.git.
VII. ACKNOWLEDGEMENT
The work was funded in part by an EPSRC New Investi-gator Award (EP/R030073/1) to DT. The remote-operatedvehicle, SMARTY, and the towing tank facility are partof the Department of Civil, Maritime and EnvironmentalEngineering at University of Southampton, United Kingdom,and the authors would like to thank Dr Blair Thornton andhis team of researchers for providing SMARTY data forvalidating the simulator.
REFERENCES
[1] J. E. Manley, “Unmanned surface vehicles, 15 years of development,”in OCEANS. IEEE, 2008, pp. 1–4.
[2] G. Papadopoulos, H. Kurniawati, A. S. B. M. Shariff, L. J. Wong, andN. M. Patrikalakis, “3D-surface reconstruction for partially submergedmarine structures using an autonomous surface vehicle,” in Interna-tional Conference on Intelligent Robots and Systems. IEEE, 2011,pp. 3551–3557.
[3] I. Loncar, A. Babic, B. Arbanas, G. Vasiljevic, T. Petrovic, S. Bogdan,and N. Miskovic, “A heterogeneous robotic swarm for long-termmonitoring of marine environments,” Applied Sciences, vol. 9, no. 7,p. 1388, 2019.
[4] Z. Liu, Y. Zhang, X. Yu, and C. Yuan, “Unmanned surface vehicles:An overview of developments and challenges,” Annual Reviews inControl, vol. 41, pp. 71–93, 2016.
[5] H. Niu, Y. Lu, A. Savvaris, and A. Tsourdos, “An energy-efficient pathplanning algorithm for unmanned surface vehicles,” Ocean Engineer-ing, vol. 161, pp. 308–321, 2018.
[6] R. Mendonca, P. Santana, F. Marques, A. Lourenco, J. Silva, andJ. Barata, “Kelpie: A ROS-based multi-robot simulator for watersurface and aerial vehicles,” in IEEE International Conference onSystems, Man, and Cybernetics. IEEE, 2013, pp. 3645–3650.

[7] M. Paravisi, D. H Santos, V. Jorge, G. Heck, L. M. Goncalves,and A. Amory, “Unmanned surface vehicle simulator with realisticenvironmental disturbances,” Sensors, vol. 19, no. 5, p. 1068, 2019.
[8] A. Thakur and S. K. Gupta, “Real-time dynamics simulation ofunmanned sea surface vehicle for virtual environments,” Journal ofComputing and Information Science in Engineering, vol. 11, no. 3, p.031005, 2011.
[9] M. Prats, J. Perez, J. J. Fernandez, and P. J. Sanz, “An open source toolfor simulation and supervision of underwater intervention missions,”in International Conference on Intelligent Robots and Systems. IEEE,2012, pp. 2577–2582.
[10] M. M. M. Manhaes, S. A. Scherer, M. Voss, L. R. Douat, andT. Rauschenbach, “UUV simulator: A gazebo-based package forunderwater intervention and multi-robot simulation,” in OCEANS.IEEE, 2016, pp. 1–8.
[11] T. Tosik and E. Maehle, “MARS: A simulation environment for marinerobotics,” in OCEANS. IEEE, 2014, pp. 1–7.
[12] J. Frechot, “Realistic simulation of ocean surface using wavespectra,” in International Conference on Computer Graphics Theoryand Applications, Portugal, 2006, pp. 76–83. [Online]. Available:https://hal.archives-ouvertes.fr/hal-00307938
[13] S. Thon and D. Ghazanfarpour, “Ocean waves synthesis and animationusing real world information,” Computers & Graphics, vol. 26, no. 1,pp. 99–108, 2002.
[14] Modelling and analysis of marine operations, DNVGL-RP-N103.DNV-GL, 2017.
[15] T. I. Fossen, Handbook of marine craft hydrodynamics and motioncontrol. John Wiley & Sons, 2011.
[16] C. Stansberg, G. Contento, S. W. Hong, M. Irani, S. Ishida, R. Mercier,Y. Wang, J. Wolfram, J. Chaplin, and D. Kriebel, “The specialistcommittee on waves final report and recommendations to the 23rdittc,” ITTC, vol. 2, pp. 505–551, 2002.
[17] E. V. Lewis, “Principles of naval architecture second revision,” Jersey:SNAME, vol. 2, 1988.
[18] O. F. Hughes and J. K. Paik, Ship structural analysis and design. TheSociety of Naval Architects and Marine Engineers, 2010.