Embed Size (px)
Citation preview

Specification for the TENDER No: DPS/IRPU/TPT/IMP/51997
Specifications of pure permanent magnet APPLE-2 type of
undulator with compatible vacuum system


This document covers specifications for the supply of “A pure permanent magnet APPLE-2 type of
undulator with compatible vacuum system” consisting of following items:
Sr. No. Item Quantity
1 A pure permanent magnet APPLE-2 type of undulator with compatible
vacuum system” (Henceforth referred as U-3 undulator system). 1 Unit
2 Spare vacuum chamber. 1Unit
Notes:
1. The vacuum chamber mentioned at sr. no. 1 and 2 must be identical.
2. Suppliers must quote for all the items mentioned above. Cost of installation and
commissioning should be quoted separately.
3. Price comparison shall be done on the total price including the cost of installation and
commissioning.
4. Price of the equipments must be quoted for ex-works duly packed and FOB.
5. Payment for installation and commissioning shall be made after successful installation and
commissioning. The schedule of installation and commissioning shall be decided mutually,
considering our machine operation schedule.


TABLE OF CONTENTS
1 Introduction................................................................................................................................ 1
2 Scope of supply ........................................................................................................................... 1
3 Deliverables ................................................................................................................................ 2
3.1 Equipments: .......................................................................................................................... 2 3.2 Reports and documentation ................................................................................................... 3
4 General remarks ........................................................................................................................ 4
4.1 Layout of straight sections .................................................................................................... 4 4.2 Definitions and abbreviations ............................................................................................... 6 4.3 Coordinate system ................................................................................................................. 6 4.4 Operating conditions ............................................................................................................. 6
4.5 Qualification of Supplier ....................................................................................................... 6
5 Site facilities and utilities available at RRCAT ....................................................................... 7
5.1 Cooling water ........................................................................................................................ 7 5.2 Compressed air ...................................................................................................................... 7
5.3 Electricity supply .................................................................................................................. 7 5.4 Crane ..................................................................................................................................... 7
6 Magnetic specification of U-3 undulator ................................................................................. 7
6.1 Magnetic system ................................................................................................................... 7 6.2 Main parameters of the U-3 Undulator ................................................................................. 7
7 Field Quality: ............................................................................................................................. 9
7.1 First and second field integrals ............................................................................................. 9
7.2 Multipole components: ......................................................................................................... 9 7.3 Field error correction .......................................................................................................... 10
8 Magnetic materials .................................................................................................................. 10
9 Mechanical frame .................................................................................................................... 10
9.1 Overview ............................................................................................................................. 10 9.2 Material ............................................................................................................................... 11 9.3 Fabrication and painting...................................................................................................... 11
9.4 Fasteners, fittings and water/air .......................................................................................... 12 9.5 Mounting and Stands .......................................................................................................... 12
9.6 Applicable standards ........................................................................................................... 12
10 Survey and alignment .............................................................................................................. 13
11 Gap positioning /Drive system ................................................................................................ 13
11.1 General ............................................................................................................................ 13
12 Interlock and safety ................................................................................................................. 14
13 Electrical systems specification .............................................................................................. 14
13.1 General ............................................................................................................................ 14
13.2 Cabling ............................................................................................................................ 14 13.3 Electrical safety issues ..................................................................................................... 14
14 Control systems and interfaces ............................................................................................... 15
15 Specification of vacuum system for U-3 undulator .............................................................. 17
15.1 General ............................................................................................................................ 17
15.2 Detailed Specification ..................................................................................................... 17 15.3 Support Stand: ................................................................................................................. 19
15.4 General Mechanical Specifications ................................................................................. 20 15.5 Vacuum Specifications .................................................................................................... 21

15.6 Welding quality assurance and testing ............................................................................ 22
16 Time scale ................................................................................................................................. 22
17 General conditions of the contract ......................................................................................... 22
17.1 Basis of the contract ........................................................................................................ 22 17.2 Supplier’s responsibilities ............................................................................................... 22 17.3 Contract person ................................................................................................................ 23 17.4 Contract phases and milestones ....................................................................................... 23
17.5 Safety and hazard management ....................................................................................... 25 17.6 Drawings ......................................................................................................................... 25 17.7 Manuals ........................................................................................................................... 25
18 Packing and delivery ............................................................................................................... 25
19 Installation and commissioning .............................................................................................. 26
20 Quality assurance and testing ................................................................................................. 26
20.1 Reliability and maintainability ........................................................................................ 26
20.2 Quality Assurance Programme ........................................................................................ 26 20.3 Factory acceptance test for U-3 undulator ...................................................................... 27 20.4 Desired accuracy of the magnetic field measurement system ......................................... 28 20.5 Factory Acceptance Tests for vacuum chamber .............................................................. 28 20.6 Site acceptance tests ........................................................................................................ 29
20.7 Final Acceptance Tests .................................................................................................... 29
21 Guarantee ................................................................................................................................. 30
22 Tendering.................................................................................................................................. 30
22.1 Tender evaluation ............................................................................................................ 30 22.2 Technical information required with the tender .............................................................. 30
Appendix-I ........................................................................................................................................ 35
UHV General Specifications ........................................................................................................... 35
Applicable Drawings ....................................................................................................................... 44
List of Figures
Figure 1: Layout of long straight section (LS-5) where U-3 Undulator System will be installed. ..... 4 Figure 2: Layout of the equipment gallery where controllers of the undulator will be placed. .......... 4 Figure 3: Component layout of the LS-5 straight section. ................................................................... 5
Figure 4: Undulator control system block diagram ........................................................................... 15 Figure 5: Inside aperture of the vacuum chamber. ............................................................................ 17
List of Tables
Table 1: Main parameters of the U-3 Undulator ................................................................................. 7
Table 2: First and second field integral ............................................................................................... 9 Table 3: Multipole components ........................................................................................................... 9 Table 4: Allowed physical dimensions of Undulator ........................................................................ 11 Table 5: Specifications of NEG coating ............................................................................................ 19 Table 6: Design and operating conditions of vacuum chamber ........................................................ 20
Table 7: Vacuum performance parameters of vacuum chamber ....................................................... 22

1
Specifications of pure permanent magnet APPLE-2 type of
undulator with compatible vacuum system
1 Introduction
Indus-2 is a 2.5GeV, 300mA, Synchrotron Radiation Source (SRS) located at Raja Ramanna Centre
for Advanced Technology (RRCAT), Indore, India. The critical wavelength of synchrotron radiation
from its bending magnet is about 1.98Å. There are sixteen bending magnets, and eight short and eight
long straight sections (LS). Out of the eight long straight sections, three are used for installing
injection systems and RF cavities and remaining five are for insertion devices.
In this storage ring electron beam is injected at 550 MeV and then the energy is increased to 2.5 GeV
in 300s. The injected beam is received from the booster synchrotron operating at 1 Hz. The horizontal
beam emittance at 2.5GeV is approximately 57nm-rad.
A beam line is proposed in Indus-2 for carrying out magnetic circular dichroism (MCD) and magnetic
linear dichroism (MLD) experiments. An APPLE-2 (Advanced Planar Polarized Light Emitter) type
undulator (U-3) made of pure permanent magnet is required for generating variably polarized
radiation. It consists of four standard Halbach-type permanent magnet rows two above and two below
the plane of the electron orbit. Two diagonal rows are coupled and allowed to translate along the axis
(bidirectional) with respect to the other two fixed rows in order to change the state of the polarization
of radiation light. Depending on the phase difference between the pair of rows radiation can be
generated whose polarization varies from linearly in horizontal to vertical plane passing through
elliptically and circularly polarised state. The undulator, U-3 is designed to produce photons having a
maximum flux between 300eV to 1500eV including higher harmonics, for a maximum beam current
up to 300mA at 2.5GeV. Expected angle integrated flux from the U-3 undulator is of the order of 1014
to 1015
photons/sec/0.1% bandwidth.
2 Scope of supply
2.1.1 Design, manufacturing, characterization, packing, transportation, installation and
commissioning of a complete turn-key out-of-vacuum pure permanent magnet APPLE-2
type planar undulator along with compatible vacuum system (U-3 undulator system) for the
2.5 GeV storage ring, subject to the performance specifications.
2.1.2 The undulator will consist of a mechanical support structure holding four movable jaws each
with magnet structure assembly and associated motor systems, encoders, control racks with
power supplies and control electronics. The necessary jacks for precision movement and
references (fiducials) on the support structure for survey and alignment of the undulator are
also included.
2.1.3 The vacuum system will consist of NEG coated vacuum chamber, bake-out jackets, and
mechanical supports for chamber with arrangement for lifting during transportation. It also
includes magnetic permeability check, cleaning, vacuum testing of uncoated chamber

2
(Helium leak testing, specific out gassing rate measurement, ultimate vacuum test and RGA
analysis), NEG coating on inside surface of the chamber, extension chamber with flanges for
NEG coating, testing and inspection after NEG coating including coating characterization,
N2 purging and blanking-off.
2.1.4 The scope of supply shall also include all other necessary accessories for processing, testing
and packing the vacuum chamber. These includes but not limited to complete set of blanking
flanges (including one blank flange with brazed copper tube of sufficient length for multiple
pinch-off at various stages like after cleaning, for N2 filling after vacuum tests and NEG
coating), oxygen free electronic grade (OFE) Copper gaskets, fasteners & fixtures etc.
2.1.5 The drawings of vacuum chamber issued with this specification are offered as a reference
design. Detailed drawings for the above mentioned deliverables shall be prepared by the
supplier and to be approved by the purchaser. The supplier shall be finally responsible for the
designs meeting the performance requirements as mentioned in this specification.
2.1.6 The supplier shall be responsible for the detailed measurements (magnetic, mechanical,
vacuum) and factory acceptance test of the U-3 Undulator System. The supplier shall provide
all the necessary and required test equipments and measurement instruments along with the
test facilities for the purpose of performing the pre-dispatch acceptance test at the supplier's
site. The measuring system shall be adequate for providing compliance of the Undulator
System as specified in this document and will have to be approved by RRCAT. All the
measurements and testing shall be carried out at a mutually agreeable controlled temperature
or at 26°C.
2.1.7 The scope of supply includes furnishing reports and documents as mentioned in section 3.2.
2.1.8 The supplier shall dispatch the complete systems to RRCAT only after receiving written
notification that the results of the tests have been accepted by RRCAT.
2.1.9 The supplier must take special care for packaging of all the ordered equipments to ensure
their safe delivery to RRCAT.
2.1.10 The supplied U-3 Undulator System shall be installed and commissioned at Indus-2 site by
the supplier.
2.1.11 Acceptance will be issued only after successful inspection and testing at RRCAT.
3 Deliverables
3.1 Equipments:
Sr. Quantity Item Description
1 1
(U-3)
Fully functional out of vacuum pure permanent magnet APPLE-2 type
undulator with associated controls, motors, encoders, control racks with
power supplies, control electronics, cables etc. ready for installation at
Indus-2 site at RRCAT, according to this technical specification.
Mechanical fasteners, supports, fiducial posts, alignment mechanisms, and
lifting arrangement for transportation and installation at site are also

3
Sr. Quantity Item Description
included.
2
1
(Compatible
to U-3)
NEG coated vacuum chamber assembly.
(Ref. Drawing. No: RRCAT\UHVTD\IND2\IDVCU\01 4 Sheets).
3
1
(Compatible
to U-3)
Spare NEG coated vacuum chamber.
4 1 Lifting frame for NEG coated vacuum chamber.
5 1 Bakeout jacket set.
6 1 Support stand set for vacuum chamber.
7 As applicable A spare stock (~10%) of magnets with characterization data for the
undulator. One set of end block magnets for the undulator.
8 As applicable All control softwares.
3.2 Reports and documentation
All documents must be
supplied in English.
All documents must be
delivered both in hard
and soft copy.
1. Detailed program for execution of the contract.
2. Preliminary Design Report (PDR).
3. Final Design Report (FDR).
4. Factory and Site Acceptance test procedures and test reports.
5. Detailed measurement procedure and accuracy of all the equipments to
be used.
6. All inspection and measurement data including magnetic, mechanical,
vacuum etc.
7. Full support documentation for all items of U-3 Undulator System,
including their installation, operation and maintenance manuals.
8. A full set of general assembly drawings/models in AutoCAD DWG
format/SolidWorks file format of all equipments of U-3 Undulator
System.
9. A list of recommended spare items.
10. Safety report.
11. Quality assurance documents for U-3 Undulator System with copies of
all specified material certificates, details of all quality control checks
and intermediate test results.
12. Specification and original make of all the major equipments used like
motor, encoder, magnet blocks, bake out jackets etc.
13. Architecture and design report for control system.

4
4 General remarks
4.1 Layout of straight sections
The following figures 1 to 3 show a part of the Indus-2 tunnel and layout of long straight section LS-5
where the U-3 undulator will be installed.
`
Figure 1: Layout of long straight section (LS-5) where U-3 Undulator System will be installed.
Figure 2: Layout of the equipment gallery where controllers of the undulator will be placed.
Note: All dimensions are in mm.
DP
Q3
Q2
Q1
Q1
Q3
SC (V)
Q2
SC (V)
DP
LS-5
U-3 UNDULATOR
Note: All dimensions are in mm.

5
Figure 3: Component layout of the LS-5 straight section.

6
4.2 Definitions and abbreviations
eV : Electron Volt MeV : 106 eV meV: 10
-3 eV GeV: 10
9eV
G: Gauss T : Tesla µrad: 10-6
radian e- :
Electron
RH: Relative humidity mSv: 10-3
Sievert m: meter approx: approximate
4.3 Coordinate system
X (or x): Horizontal Y (or y): Vertical S (or s): Longitudinal axis.
4.4 Operating conditions
Indus-2 storage ring is located in an over ground circular tunnel of width 5.3m and height 6.0m. The
complete tunnel is air conditioned and during operation, temperature inside the tunnel is maintained
within 26°C±1°C. During operation, the radiation level inside the tunnel is of the order of
~100mSv/hr. Therefore all the parts of the Undulator System (excluding control racks which will be
installed outside the tunnel) will be exposed to a radiation level of the same order during its lifetime.
In view of this it is mandatory that the components used in Undulator System should be radiation
resistant. There are a number of other electromagnetic components in the vicinity where the undulator
and its control system will be installed. Therefore the supplied equipments shall be in full compliance
with the safety, protection and EMC Regulations in force and the relevant IEC (International Electro
technical Commission) standards and recommendations.
When storage ring is not in operation, the ambient temperature in the tunnel and equipment gallery
varies from 20°C (approx.) in the winter to 40°C (approx.) in the summer. Therefore the undulator
system should withstand in the above mentioned conditions.
4.5 Qualification of Supplier
Supplier meeting all the following requirements will be treated as qualified supplier.
4.5.1 Supplier must be the original manufacturer of pure permanent magnet (PPM) Undulator or
authorized representative.
4.5.2 Supplier must have supplied similar equipments to other reputed electron storage rings.
Detailed references like, company name, contact name and email of similar contracts,
executed by the supplier, are to be mentioned.

7
4.5.3 Supplier must have the facilities to characterize the undulator up to the specified accuracy
and certification of measurement accuracies traceable to international standards (ISO type
certification or equivalent) must be provided. Where no such standards exist, the basis used
for calibration or verification shall be provided.
5 Site facilities and utilities available at RRCAT
5.1 Cooling water
Water conductivity: ≤1.0 µSiemens/cm Temperature: 26°C ±1°C
Maximum inlet pressure: 9 kgf/cm2 Allowed pressure drop: 5 kgf/cm
2
5.2 Compressed air
Maximum pressure: 7 to 8 kgf/cm2 Humidity: 20%RH
5.3 Electricity supply
Supply type: AC electricity Frequency: 50 Hz ±3%
Line voltage: 415±10% VAC-3 phase and 240±10% VAC-1 phase
5.4 Crane
There is a 10MT EOT crane installed in the tunnel which is used for moving material from one place
to another in the tunnel. After entry in the tunnel, the undulator will be moved at its destined location
by using this crane. The height of a single component that can be brought in and moved easily in the
tunnel is 2.1m. The supplier shall try to design the undulator keeping this dimension in mind. In case
if it is not possible to meet these dimensions then it has to be discussed and agreed upon during the
design phase of the undulator. But in any case the height of a single component must not exceed
2.30m.
6 Magnetic specification of U-3 undulator
6.1 Magnetic system
The goal of the magnetic design of the undulator is to maximize the flux of photons emitted in a
narrow cone for store beam current of 300mA at 2.5GeV. The spectral region will extend from 300eV
to 1500eV including higher harmonics, to facilitate MCD and MLD experiments on the proposed
MCD beamline. Therefore, an APPLE-2 type undulator having Halbach-type permanent magnet rows,
to suit the requirement, is to be considered for this beamline. Main parameters of the U-3 Undulator
are as follows:
6.2 Main parameters of the U-3 Undulator
Table 1: Main parameters of the U-3 Undulator
Sr. Parameter Specification
1. Undulator type APPLE-2
2. Configuration Pure Permanent Magnet (PPM)
3. Remanent field Br ≥ 1.25 T

8
4. Total length of the complete
Magnet Assembly
1.95 m ± 0.05 m (including the movement of rows)
(Maximum length available is 2.0 m)
5. Energy of the output radiation 300 eV to 1500 eV (including higher harmonics)
~350 eV to 1000 eV (1st harmonic) (circular)
800 eV onwards higher harmonic
6. Gap range
Operating range, where the above
specified output radiation will be
available, is approximately 23mm
to 70mm.
Gap range: ~23mm to ~250mm
Minimum operating pole gap: ≥ 23 mm
It will depend on the design of the vacuum chamber that
provides a clear vertical aperture of 16 mm for the
electron beam and also produce 300eV output radiation.
For detail aperture profile of vacuum chamber see Figure
5.
Maximum pole gap: ~250 mm
The maximum operating pole gap at 2.5 GeV will be
decided to provide the required output radiation of
1100eV (1st harmonic, circular polarisation).
However larger pole gap opening is required to facilitate
an efficient injection of the electron beam into the storage
ring at 550 MeV. The supplier has the freedom to design
a maximum gap so that the field integral (≤ 10 G-cm) will
have negligible effect on the electron beam at 550 MeV
during injection.
7. Pole gap measurement and
repeatability.
Suitable number of absolute linear encoders should be
provided for an accurate measurement of the undulator gap.
The accuracy of the drive system should be such that the
pole gap repeatability (bidirectional) is within ±0.02 mm.
Encoder resolution: ≤0.001mm
Step of gap variation: ≤0.05 mm
8. Transverse gap between arrays ≤ 2mm
9. Direction of the movement of
diagonal rows.
Both parallel and anti-parallel (by directional)
10. Pole gap variation speed ≤ 5 mm/s
11. RMS Phase error at all the
operating gaps (excluding two end
periods)
≤ 5o
12. Height of the undulator axis (mid
plane) from the floor 1.25 m(nominal) ± 25mm(adjustable)
13. Horizontal adjustment of the
undulator axis on the laboratory
floor (longitudinal and transverse)
±15 mm
14. Variation of the position of the
undulator axis ± 0.06 mm (for all the operating gaps)

9
15. The ratio of the rms deviation in the
magnitude of the on axis peak field,
(ΔB)rms in different half periods to
its mean magnitude, <B> of the
peak field in different half periods
(excluding two end periods).
[(ΔB)rms /<B> ] ≤ 0.6 %
16. Period length (λu) ~56mm
* block size (XxYxS) (40x40x13.9) mm
3
The supplier may choose the period length and block
dimensions accordingly to provide the required output
radiation and satisfy all the magnetic field qualities.
Attempt must be made to accommodate maximum number
of periods in the given length.
17. * Number of periods ~31 including end blocks
* Our calculated values.
7 Field Quality:
7.1 First and second field integrals
The maximum values of the first and second integrals of the magnetic fields within x= ±15mm and
within vertical range of y= ±3mm, at all operating magnetic pole gaps and phases (operating range
~23mm to ~70mm) are specified as follows:
Table 2: First and second field integral
Expression Values
1st vertical field integral | dsBy
| ≤ 50 G-cm
(on axis ≤ 30 G-cm)
2nd
vertical field integral | /dsdsBy | ≤ 8000 G-cm2
1st horizontal field integral | dsBx
| ≤ 50 G-cm
2nd
horizontal field integral | /dsdsBx | ≤ 8000 G-cm2
7.2 Multipole components:
The limits on the normal and skew integrated multipole field at x= ± 15mm and within vertical range
of y= ± 3mm, at all operating magnetic pole gaps (operating range ~23mm to 70mm) are specified as
follows:
Table 3: Multipole components
Integrated normal and skew multipole field components Value
Quadrupole ≤ |50| G
Sextupole ≤ |60| G/cm
Octupole ≤ |100| G/cm2

10
7.3 Field error correction
7.3.1 Sorting, shimming and multipole correction
The supplier may employ suitable correction strategies (e.g. sorting of the magnet blocks and/or
employing shimming technique, multiple trim magnets, magic fingers, corrector coils etc.) to
minimize the magnet block to block imperfections and achieve the required r.m.s. phase error of ≤50,
field integrals and integrated multipole field components as specified in Table 1, 2 and 3, respectively.
The correction strategy must be reported in the design report.
In addition to these, correction coils each at the entry and exit to produce ~ ±200Gcm vertical
integrated field and correction coils each at the entry and exit to produce ~ ±200Gcm horizontal
integrated field must be provided by the supplier along with the suitable power supplies. The above
two pairs of correction coils will be used by RRCAT for machine operation.
7.3.2 End pole correctors:
The end poles/structure of the undulator shall be designed suitably not only to satisfy the field
integrals listed above, but also the electron beam trajectory (either vertical or horizontal) should
remain symmetric about the central axis for ideal case with zero error in block to block magnetisation
and block positioning error. Three magnet blocks are generally used at the each ends to achieve this
(as explained in the reference "End field structures for linear/helical insertion devices", J. Chavanne,
P. Elleaume, P. Van Vaerenbergh, Proceedings of the 1999 Particle Accelerator Conference, New
York, 1999).
8 Magnetic materials
Permanent magnet blocks should be preferably made of NdFeB material with desired remnant
magnetic field as specified in Table-1. The magnetic material should be such that there is no
degradation of magnetic properties even when the undulator is exposed to a temperature up to ~500C.
There should not be any measurable loss of magnetization during assembly. The permanent magnet
blocks shall be protected against any harmful corrosion with loss of properties (magnetization) for a
period of 20 years in the operating conditions and radiation environment as specified in section-4.4.
The magnets should have suitable protective coating such that they work without degradation in their
quality up to relative humidity of 60%. The magnet characterization data of all the magnets and the
M-H curve of the material should be provided at suitable controlled room temperature. Manufacturer
of magnet blocks must have ISO or equivalent certification. A spare stock (~10%) of magnets should
also be provided with characterization data. One set of end block magnets are to be supplied as spare
for the undulator. The magnet type and grade with properties must be informed to RRCAT at the
design review stage.
9 Mechanical frame
9.1 Overview
9.1.1 The mechanical support structure shall hold movable jaws each with magnet structure/girder
assembly. The support structure shall have mechanisms (motors, gearboxes, spindles,
guiding rails, encoders, electro-magnetic brakes etc.) for varying vertical gap between

11
magnet structure assemblies and also allow translational motion to change the state of
polarization.
9.1.2 The floor space available for installation of undulator is given in the table below and also
shown in Figures 1 to 3. The size of the mechanical support structure shall not exceed this
limit. Any deviation from the specified dimensions is to be approved by RRCAT.
Table 4: Allowed physical dimensions of Undulator
Sr. Parameters Specification
1. Maximum Height ≤ 2.1m, limited from installation considerations (see section-5.4). The exact
height will be agreed upon during design phase of the undulator.
2. Total width
≤ 1.1m, limited from installation consideration (Figures 1 to 3).
The space available on inner side is approximately 0.8m from electron beam
axis (See Figures 1 to 3).
The exact width will be agreed upon during design phase of the undulator.
3. Maximum length ≤ 2.0m (see Figure 3)
4. Height of
undulator axis 1.25 m (nominal)
5. Clearance from
floor
The clearance between the bottom of the support structure and floor should be
of the order of 100mm. This is to avoid re-routing of already existing cables
which are running across the long straight section LS-5, where the undulator
will be installed. The exact clearance will be agreed upon during the design
phase of the undulator.
9.1.3 During the installation process, undulator shall be lifted and moved by EOT crane therefore
suitable lifting eyes/hooks are to be provided in the support structure for lifting and moving
the undulator by EOT crane.
9.1.4 Maximum weight of any single item must not exceed 10 Ton because a 10MT EOT crane
will be used for moving material from one place to another in the tunnel.
9.2 Material
Fusion welding quality steel as per grade A of IS: 2062(Indian standard) / U.S.A ASTM A36/ EN
10025 S235 or S275 (Europe) / ST 37.2 0.17/ CHINA Q 235/ JAPAN JIS 3101 SS400 shall be used
in the construction wherever welding is involved for the frame structure of the Undulator.
9.3 Fabrication and painting
9.3.1 Fillet welds at all the locations will be such that the root penetration is ensured.
Requirements of structural fabrication as per relevant standard shall be fully adhered to.
Welding processes are to be approved by RRCAT. All the structural welding jobs shall be
carried out by qualified welder as per applicable standard.
9.3.2 Dye Penetrant Test (DPT) shall be done on all welds for which detailed procedure shall be
submitted to RRCAT for approval before fabrication of the structure. The use of liquid
penetrant materials from aerosol spray cans using Freon as the propellant is prohibited on

12
austenitic stainless steel. Weld repairs shall be re-examined by the examination method(s)
which revealed the original defect.
9.3.3 All the surfaces subject to corrosion should be suitably anodized or painted wherever
applicable. Painted or anodized surfaces shall be uniform in color and texture and quality of
paint shall be compatible with the storage ring radiation environment. Final coating shall be
of a color decided by the purchaser at the time of painting.
9.3.4 The parts shall be free of burrs and sharp edges, and free of dents, gouges and scratches. The
parts shall be clean and free of dirt, oil and grease with the exception of the appropriate
lubrication on moving bearing surfaces, and unpainted mild steel mounting surfaces. Bearing
surfaces shall be lubricated as required by the assembly drawing. Unpainted steel mounting
surfaces (those surfaces clearly defined on the engineering drawing to be paint free) shall be
clean, rust free and coated with a light film of machine oil.
9.3.5 Where ever necessary and applicable, fasteners shall be locked by washers or similar locking
devices to prevent loosening.
9.4 Fasteners, fittings and water/air
All equipment shall use metric fasteners, nuts and washers throughout. If this is not possible, then
each deviation should be approved by RRCAT. The supplier will be required to supply spare fasteners
for each case of using non standard fasteners, nuts or washers. The quantities are to be agreed with
RRCAT. All equipment shall use uniform tube for water, air, etc. throughout. The sizes shall be
approved by RRCAT during the design phase.
9.5 Mounting and Stands
9.5.1 The undulator shall have suitable base-plates which can be fixed with the concrete floor by
anchoring and over which the jacking mechanism of undulator with six degrees freedom
structure will rest. The jack-base-plate and jacks/adjustment screws must be designed to
allow movement of the undulator support structure in all the six degrees of freedom. The
minimum linear movement in vertical and horizontal directions shall be ±25 and ±15mm,
respectively with an accuracy of ±0.05mm. There shall be provision to lock the position of
the undulator after final alignment.
9.5.2 Suitable wheels are to be provided in the support structure for easy movement of undulator
from unloading bay area to the Indus-2 tunnel. When height adjusting screw jacks are
tightened, the load should get shifted from wheels to screw jacks.
9.6 Applicable standards
Following standards of latest issue, in force at the time of placing order, shall govern various aspects
of the work:
9.6.1 Weld symbol interpretation shall be in accordance with the Standard Symbols for Welding,
Brazing and Nondestructive Examination, ANSI/AWS A2.4-86.
9.6.2 Welding practice shall conform to the Structural Welding Code, ANSI/AWS D1.1-90.

13
9.6.3 Welder/welding machine operators shall be qualified as per Section IX of Boiler and
Pressure Vessel Code of ASME or equivalent Indian standard (IS), IS: 823, IS: 817, IS:
1181.
9.6.4 Painting/coating shall be tested as per ASTM: D3359-07 (or latest)- Standard test methods
for measuring adhesion by tape test or equivalent.
10 Survey and alignment
10.1.1 To align the Indus-2 storage ring, method of 2-D (horizontal) coordinate measurements along
with separate control of elevations has been adopted. A number of reference points are fixed
in the tunnel. Coordinates and elevations of these reference points are known in machine
coordinate system. The undulator will be aligned with respect to these reference points. The
alignment will be carried out by RRCAT using Leica make theodolite TDA5005 or Laser
absolute tracker AT401, optical level and precision electronic/spirit level.
10.1.2 For alignment of the undulator, minimum six reference fiducial posts are to be fixed on the
rigid part of the support structure of the undulator. These fiducial posts shall be suitable for
adopting 1.5inch/3.5 inch Corner Cube Reflector (CCR) or Taylor-Hobson sphere (T-H
sphere) during coordinate measurements. The fiducial post (conical base) along with CCR/T-
H sphere will represent one precise point (centre of CCR/T-H sphere). The relationship
between the centre of CCR/T-H sphere and undulator magnetic axis has to be provided by
the supplier with accuracy better than 40µm. The supplier shall use laser tracker or
instruments having similar accuracy, for fiducialization. Also, one level plate (size:
200mmx200mm) parallel to magnetic median plane, has to be fixed on the rigid part of the
support structure for direct monitoring of tilt using precision level or Leica Nivel-20.
10.1.3 The locations and dimensions of fiducial posts and level plate on the undulator support
structure have to be discussed and agreed with RRCAT during the design phase of undulator.
11 Gap positioning /Drive system
11.1 General
11.1.1 The gap positioning /drive system should allow the opening of nominal gap from 23mm to
250mm (may vary as described in Table 1).
11.1.2 Absolute linear encoders have to be used for gap measurement. The gap drive system should
have a control scheme to give variable gap speeds for precision movement during experiment
and coarse movement during wide opening of gap for beam injection purposes etc. It should
automatically give high speed slew for large position error and proportionally reduce the
speed as the error reduces. The gap movement system should have minimum backlash (or
have anti- backlash) to allow to approach a given gap from both directions. Overall the gap
positioning accuracy should be better than 20µm in the operating range. During wide
opening, the gap opening speed should be of the order of 5 mm/sec or more.
11.1.3 There must be an alternate mechanism to open the gap in synchronous manner in case of
failure of gap drive mechanism.

14
11.1.4 The offer shall preferably provide drive mechanism configuration and sizing details to
demonstrate adequacy in achieving the positioning accuracy and drive power.
12 Interlock and safety
12.1.1 Software limit on the minimum and maximum gap change (limits must not be changeable by
the operator).
12.1.2 There shall be two sets of safety limit switches, (electrical end-stop) for both upper and lower
jaws at the minimum gap position to protect vacuum beam chamber. First one is the pre limit
which can be over ridden remotely. The second one is the final limit which that can be over
ridden by manual intervention using a key switch mounted on the undulator. Position of each
limit switch shall be settable through jacking screw after installation of the vacuum chamber
to an accuracy of ±100µm.
12.1.3 In addition to limit switches, mechanical hard stops (adjustable and will be finalized during
design stage) is required to protect the vacuum chamber and the mechanical structure at
extreme ends of the jaw openings. The system should have self-locking facility so that no
gap movement occurs due to the attractive force between the poles in case of power failure.
12.1.4 Two emergency stop switches (normally be closed and will open when activated) should be
provided (one in the undulator body and the other one could be at the rack or near operator)
to stop gap movement during emergency.
12.1.5 The final choices with minor details on the safety and interlock system shall be finalized in
consultation with the supplier.
13 Electrical systems specification
13.1 General
The electrical system consists of control panels, racks, power distribution, cabling, wiring etc.
The control racks for the operation of the Undulator System will be installed in the Equipment Gallery
(air conditioned environment, temperature 26°±1°C) of the Indus-2 building (see Figure 1 to Figure
3). The distance between the undulator and the racks is approximately 30m. The supplier will be
responsible for all the cabling inside the undulator, control racks and from undulator to control racks.
Without air-conditioning, the ambient temperature in the Equipment Gallery ranges between 20°C to
40°C.
13.2 Cabling
All cable and wiring must be LSZH-FR (Low Smoke, Zero Halogen, Fire Retardant) unless
specifically agreed otherwise, complying with IEC 60754-1 and IEC 60332. The oxygen index must
be higher than 28 and acid gas emission less than 4% for the outer sheath. PVC compound must not
be used.
13.3 Electrical safety issues
Electrical equipments shall be constructed in accordance with best practice and must conform to all
applicable CE norms and standards. High voltage components, connectors, wiring terminations, etc.

15
shall be physically separated from low voltage control circuits. Personnel shall not be exposed to high
voltages while performing routine service on energized control circuits. There are a number of other
electromagnetic components in the vicinity where the undulator and their control systems will be
installed. Therefore the supplied equipments shall be in full compliance with the safety, protection
and EMC Regulations in force and the relevant IEC (International Electro technical Commission)
standards and recommendations.
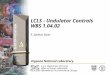
14 Control systems and interfaces
Undulator control system block diagram is as shown in the figure below:
Figure 4: Undulator control system block diagram
14.1.1 The undulator motion controller shall have its own position feedback mechanism for highly
repeatable positioning of the pole gap (Table 1).
14.1.2 Local controller shall have provisions for local operation possible from the controller, with
complete functionality.
14.1.3 The transfer of control from local to remote or vice versa should be bump less.
14.1.4 Once the control is transferred to remote mode all status shall be displayed on local controller
for monitoring.
14.1.5 The remote control link for the Undulator control shall be Ethernet 100BaseT or 1000BaseT
on modbus TCP. Supplier shall provide complete protocol details for custom software
development.
14.1.6 The supplier shall provide a well-documented protocol for the remote control of the different
functionality of the Undulator. Example programs shall be provided as template.
14.1.7 Indus 2 machine control system is running using PVSS II supervisory control and data
acquisition system. The actual characteristics and functionalities of the remote control shall
be defined and implemented in co-operation with RRCAT and finalized during PDR.
14.1.8 Interlocks for safe operation using PLC shall be provided. The supplier shall also provide
fully documented source code and object code to RRCAT for sake of maintenance and
upgradation.
Local Controller (Undulator control
system)
Accelerator control system (Indus Main control room)
Undulator and Vacuum chamber
Power cables
Instrumentation cables
Ethernet link
Potential free
Contacts (Interlocks)

16
14.1.9 Hard wired safety interlocks shall be provided for safe operation. Interlocks and controls
shall be designed to be failsafe. A safe state shall be indicated by a potential free closed
contact. An unsafe state shall be indicated by open state of potential free contact. On power
failure, the system shall indicate an unsafe state. All potential free contacts shall be rated for
24 VDC, 0.5 Amps.
14.1.10 Minimum ten temperature sensors (to be agreed upon during PDR) shall be provided to
monitor temperature of vacuum chamber body. The controller shall have provisions to detect
temperature rise above dangerous level and operate a potential free contact. This potential
free contact shall be provided such that closed contact opens to indicate ‘Temperature
interlock failure’ which will be used by Indus control system to trip low level RF (for killing
e beam). However detailed operational requirement shall be discussed and agreed during
PDR.
14.1.11 Two digital flow switches shall be mounted in water cooling line of vacuum chamber to
monitor cooling water flow. For this a potential free contact shall be provided such that
closed contact opens to indicate ‘Flow interlock failure’. However detailed operational
requirement shall be discussed and agreed during PDR.
14.1.12 A potential free contact shall come to local controller (undulator control system) from main
control system (Indus control room) as a ‘permission to move the jaws’. Close contact shall
represent ‘permission to move jaws’. The undulator jaws shall not move unless this contact is
received at the local controller.
14.1.13 A potential free contact shall be provided to indicate ‘Fully open jaws’ of undulator.
14.1.14 The supplier shall provide suitable racks/panels/enclosures for the proper installation of
equipment controllers.
14.1.15 Power lines shall be separated from control signals lines.
14.1.16 All wiring diagrams, cable types, and tabulated system I/O, shall be provided to RRCAT.
14.1.17 The I/O labeling standard in wiring diagrams, schematics, and on the components shall be
provided in details.
14.1.18 The signals of all electrical instruments associated with the Undulator Systems shall be
tabulated against their identifier with respect to contact points and signal type.
14.1.19 The supplier shall provide the electrical specification and pin-out for all instrumentation
including but not limited to motors, sensors, power supplies, switches, and encoders etc.
complete technical details/ data sheets of every components shall be provided.
14.1.20 The supplier shall mention the possible failure of components during operation and
requirements of spare based on that.
14.1.21 The control system design shall be such, that the system itself perform ‘self diagnostic tests’
and operator initiated test sequences and inform about the machine health/malfunctioning
/failure of the components and functionality at local controller and Indus control room with
appropriate distinct fault codes.

17
14.1.22 The modular architecture shall be provided so that faulty module/subsystem/components are
replaced with another with least downtime.
15 Specification of vacuum system for U-3 undulator
15.1 General
15.1.1 Non-evaporable getter (NEG) coated aluminium alloy vacuum chamber with inside ultra
high vacuum (UHV) environment is required which will fit inside the pole gap of the U-3
undulator and get connected with adjacent vacuum components for circulation of stored
electron (e-) beam. Vacuum component layout of LS-5 is shown in Figure 3. The pressure
inside the chamber must be less than 5.0 X 10-10
mbar without beam and ~ 1.0 X 10-9
mbar
with e- beam current of 300 mA at 2.5 GeV.
15.1.2 Vacuum exposed surface of the vacuum chamber will be coated with NEG coating. To
improve the vacuum performance and to activate the NEG coating on the chamber, the
chamber will require in-situ bakeout (heating) at 180ºC ±5ºC for nearly 24 hours.
15.1.3 Chamber will be supported on three column type support stands (one at each flange end and
one at mid span of the chamber) for placement, alignment and in-position holding of the
chamber.
15.1.4 Maximum length of the vacuum chamber is 2200 mm (including end flanges, see Figure 3)
and all the required accessories like support stands and bakeout jackets etc. will be placed
within this.
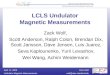
15.1.5 Inside aperture of the chamber cross-section is racetrack having dimension 17 mm (Vertical)
X 81 mm (Horizontal) shown in Figure 5.
15.1.6 Dimensions of outer side of the chamber cross-section will be designed suitably to match
with the minimum pole gap requirement of the U-3 undulator.
Figure 5: Inside aperture of the vacuum chamber.
15.2 Detailed Specification
15.2.1 Vacuum Chamber
Note: All dimensions are in mm.
81
64
17
R8.5
X 2

18
15.2.1.1 The main part of the chamber shall consist of a precision machined aluminium extrusion
with a race track vacuum channel and two water cooling channels on either side. Cooling is
by means of water flowing through the water channels.
15.2.1.2 Temperature sensors as described in 14.1.10 shall be installed on vacuum chamber for
monitoring the temperature of the vacuum chamber. (Detailed to be agreed at PDR).
15.2.1.3 Digital flow switches as described in 14.1.11 shall be installed in water cooling channels of
vacuum chamber for monitoring of water flow. (Detail to be agreed at PDR)
15.2.1.4 At each end of the chamber the aluminium extrusion will be welded to an explosion-bonded
bimetallic (AISI316L/AA6061-T6) flanges (available from Atlas Technologies or
equivalent) to enable a joint to be made to a conventional stainless-steel DN160 CF flange.
15.2.1.5 The ends of the water channel shall be plugged with welded aluminium plugs and the water
connections are provided by means of stainless-steel double ferrule compression fittings
sealed to the chamber body with an aluminium gasket.
15.2.1.6 At the end of the vacuum chamber demountable aluminium alloy stiffeners are fitted to
provide extra support to helium leak tight circumferential weld (flange to chamber) during
handling. Non-silver-plated stainless steel bolts shall be used for joining with vacuum
chamber. These stiffeners shall be removed at the time of final installation.
15.2.1.7 Vacuum chamber shall be designed by the supplier based on the specified design pressure
and temperature.
15.2.1.8 Top and bottom wall thickness of the chamber shall be kept minimum possible as per the
requirement of minimum pole gap of the undulator.
15.2.1.9 Outer top and bottom surfaces of the vacuum chamber will be machined flat to make them
parallel with the undulator magnet pole faces. Straightness and parallelism of the machined
top and bottom surfaces shall be maintained suitably to avoid interference with the
minimum pole gap of the undulator. Tolerances are mentioned in the drawing No:
RRCAT\UHVTD\IND2\IDVCU\02.
15.2.2 Lifting Frame
15.2.2.1 The vacuum chamber will be installed within the shielded walls of the storage ring tunnel.
Provision must be made to allow them to move using EOT crane into the storage ring
tunnel without overstressing the aluminium weld and peel off of coated NEG film by
sagging. The chamber must therefore be designed and supplied together with suitable
lifting frame.
15.2.2.2 Design of the lifting frame will ensure the straightness of the chamber and perpendicularity
of the bimetal flanges towards the vessel axis in both directions at right angles with respect
to the beam axis for easy entry.
15.2.2.3 The lifting frame shall be designed including a structural calculation to lift 10 times the
nominal loads.
15.2.2.4 Accessories for safe handling and installing the chamber shall also be part of
contract/supply.

19
15.2.3 NEG Coating
15.2.3.1 Internal surfaces of the vacuum chamber shall be coated with NEG coating using DC
magnetron sputtering whose activation temperature is ~180°C and giving maximum
distributed gas sorption performances. The extent of the coating on the inner surface shall
be throughout the entire length of vacuum chamber.
15.2.3.2 Sealing surfaces of end flanges shall be properly masked to avoid any coating on them.
15.2.3.3 The actual film thickness and chemical composition shall be assessed by a measurement on
a silicon test coupon.
15.2.3.4 After coating the visual check shall be carried out to check the quality of adhesion.
15.2.3.5 The leak test shall be performed before and after the NEG coating.
15.2.3.6 Chamber shall be evacuated and back filled with dry nitrogen before shipment.
15.2.3.7 The NEG coating should meet the following specifications.
Table 5: Specifications of NEG coating
NEG film nominal composition Ti30Zr30V40 +/- 30 % ( atomic % )
Average Thickness 1.0 micron (variations ±20%).(Details to be agreed)
Adherence No evidence of flaking or peel-off or swelling from the
substrate.
Activation temperature cycle ~180 °C for 24 hours
No. of saturation / activation cycles ≥ 20 cycles
15.3 Support Stand:
Two types of adjustable metallic support stands (fixed and flexible) shall be required for supporting
the vacuum chamber at tunnel site of storage ring. One set of support for vacuum chamber shall
consist of two flexible supports (one at each end of the chamber) and one fixed support (at the mid
span of the vacuum chamber). Each support will have floor mounted metallic saddle/column with
base fixed on the floor. Fixed support at mid span will not allow any degree of freedom to chamber
after locking the position after alignment. Flexible support will allow the longitudinal (axial)
movement of chamber due to thermal expansion during bakeout and operation. End flexible supports
shall have demountable clamping member on top for gripping the chamber/flange cross-section.
Supports shall be equipped with adjustment screws to provide height adjustment and levelling of
chamber mid plane at 1250 mm reference height. On the top side of the chamber at both the ends
there will be fiducial features for facilitating survey and alignment. Adjustment stroke of ±15mm in
all directions shall be provided in design of support structure. With this support structure it will be
possible to align the vacuum chamber with an accuracy of ±0.15mm. Locking nuts shall be provided
to lock the freedom after the alignment is over. Supports column shall be erected right from ground
floor and all the hardwares like concrete fasteners, screws and washer etc. shall be in supplier's scope.
The support structure shall not extend beyond 2200 mm length allocated for the vacuum chamber.

20
Support stands and mountings shall be adaptable with design of bakeout jacket for in-situ bakeout of
the chamber.
15.3.1 Bakeout Jackets
15.3.1.1 One complete set of suitable removable type bakeout jackets including temperature sensors
(thermocouples) is required for baking and activation of the vacuum chamber.
15.3.1.2 The jackets must be capable of continuous bakeout upto a temperature of 200°C ± 5°C for
periods extending upto 24 hours. The heaters incorporated in the bakeout jackets must be
compatible with 240V ±10%, 50Hz AC supply. The thermal insulation shall be specified
for minimum 100 numbers of bakeouts at the specified maximum temperature without
deterioration or fibre shedding. The thickness of the jacket should not be more than 50 mm.
15.3.1.3 The jackets shall be designed such that it can be removed and refitted at least 100 times
without deterioration or fibre shedding.
15.3.1.4 The bakeout system for chamber is to be divided into maximum 8 zones and with a
maximum power of 2.5 kW per zone, so as to be compatible with standard RRCAT
bakeout controller. The uniformity of temperature all along the chamber shall be
maintained within ±50C.
15.3.1.5 Each heating zone of jacket is to have one K type thermocouple fitted for temperature
control and monitoring. The thermocouple and heater should be terminated outside the hot
zone in a suitable plug (to be agreed). The cold tails to the connectors must be at least 1m
long.
15.3.1.6 All the thermocouples and heaters must be uniquely identified by heat resistant labels and
must be terminated outside the hot zone at locations to be approved by purchaser.
15.3.1.7 The thermocouples used shall be of industry standard, insulated with metal sheaths and any
fixing features required.
15.3.1.8 The jackets must comply with all relevant international health, safety and environmental
standards.
15.3.1.9 Detail specification of all heaters, insulating jackets, thermocouples and wiring must be
approved by purchaser at the Design Review.
15.4 General Mechanical Specifications
15.4.1 Design and Operating Conditions
Design and operating conditions for vacuum chamber shall be as follows:
Table 6: Design and operating conditions of vacuum chamber
Sr. Parameter Values
1 Design Pressure 1.033 kgf/cm2 differential. (External)
2 Design Temperature 200ºC
3 Cooling water circuit Operating Pressure 9 kgf/cm2 (gauge)
4 Cooling water circuit test pressure 13.5 kgf/cm2 (gauge)
5 Cooling water circuit inlet temperature ~ 26°C

21
Vacuum chamber shall be designed for the above mentioned designed conditions and shall meet the
following requirements:
15.4.1.1 Maximum elastic deflection of the top and bottom thin wall of chamber cross section due to
differential pressure shall be ≤ 0.25 mm per side.
15.4.1.2 The maximum stress (Von-Misses) shall be ≤ 62.5% of the minimum allowable yield
strength of the material at design temperature.
15.4.1.3 A plane stress and strain analysis shall be carried out to meet the requirement for stress and
deflection.
15.4.2 Construction Materials
15.4.2.1 Materials of construction of components of vacuum chamber are shown in bill of material
of referenced chamber assembly drawing (Drawing no.: RRCAT\UHVTD\IND2\IDVCU\02).
15.4.2.2 Construction material for supports shall be selected by the manufacturer out of suitable
grades of Aluminium alloys/Austenitic stainless steel to meet the requirement for magnetic
permeability.
15.4.2.3 Relative magnetic permeability of vacuum chamber components and supports shall be
≤1.02 (To be discussed and agreed during PDR).
15.4.3 Fasteners and Fittings
15.4.3.1 Details of the fasteners and fittings required for vacuum assemblies are given in the
Appendix - I. The stainless steel bolts fitting into threaded holes in the aluminium are not to
be silver plated to prevent seizing.
15.4.3.2 Be-Cu thread inserts shall be used in the threaded holes of aluminium.
15.4.4 Water Cooling
Hydrostatic test of the cooling circuit shall be performed (15 bar x 1 hour). The test shall be carried
out using de-mineralised water and the values shall be recorded manually.
15.4.5 Mechanical tolerances
All single items and component shall be inspected. A series of measurements by ultrasonic probe
before and after machining the chamber shall be carried out and reported. A certificate of conformity
shall be submitted.
15.5 Vacuum Specifications
15.5.1 General
15.5.1.1 The pressure inside the chamber must be less than 5.0 X 10-10
mbar without beam and ≤1.0
X 10-9
mbar with stored e- beam of 300mA current at 2.5GeV.
15.5.1.2 Pressure profile simulation shall be performed by the supplier for various gas loads.
15.5.1.3 General UHV system requirements are given in the Appendix-I.
15.5.1.4 The required vacuum joint technology is the Conflat® configuration. Flange dimensions
shall conform to purchaser’s reference drawing.

22
15.5.2 Vacuum Performance
The vacuum chamber after bakeout/activation must meet the following vacuum performance
requirements.
Table 7: Vacuum performance parameters of vacuum chamber
Pressure ≤ 5.0 x10-10
mbar
Helium Leak Rate (single localised leak) ≤1.0 x10-10
mbar.l/s
Specific Outgassing Rate ≤1.0 x10-12
mbar l/s/cm2
RGA Spectrum1
General Contamiants2 ≤ 1 % of the total pressure
Chlorine Residue3 ≤ 0.1 % of the total pressure
Hydrocarbon residue4 ≤ 0.1 % of the total pressure
1 Residual gas analysis from 1 to 100 AMU shall be performed after bakeout.
2 Sum of AMUs 39, 41-43, 45 and above, excluding those listed elsewhere.
3 Sum of AMU 35 and 37.
4 Sum of AMUs 69 and 77.
15.5.3 Bakeout
Bakeout and vacuum test procedure to be followed by supplier shall have prior approval of purchaser.
15.6 Welding quality assurance and testing
Welding quality assurance and testing shall be as per Appendix -I.
16 Time scale
The supplier shall give the time schedule for submitting the Preliminary Design Report (PDR), its
approval by RRCAT, Final Design Report (FDR), manufacturing schedule, characterization and
Factory Acceptance Test schedule, delivery and installation schedule. The total time for delivery of
U-3 Undulator System to RRCAT should preferably not exceed 18 months from the date of award of
the contract.
17 General conditions of the contract
17.1 Basis of the contract
17.1.1 The contract will be based on the following documents:
• Technical Specification.
• All other documents issued with Technical Specification.
• Any amendments issued by RRCAT during the tender period.
• Supplier’s tender proposal.
17.1.2 Strict compliance with these contract documents is required unless otherwise specifically
agreed in writing.
17.2 Supplier’s responsibilities

23
17.2.1 The supplier is responsible for meeting all the requirements of this specification and for all
aspects of the performance of the Undulator System: magnetic, mechanical, electrical,
vacuum, as well as safety aspects, including testing and certification.
17.2.2 The supplier will be responsible for the final design, the production methods and the correct
performance of all the items that are supplied, irrespective of whether they have been chosen
by the supplier or suggested by RRCAT. Although RRCAT shall approve the design and
components, it is the sole responsibility of the supplier to meet all the specifications.
17.2.3 The supplier shall provide all materials and necessary tooling, jigs and fixtures required for
the installation and commissioning of the undulator in Indus-2 at RRCAT.
17.2.4 The supplier shall also provide all test equipments and measuring instruments required to
certify the performance of the device at the factory site.
17.2.5 The supplier is advised to work in close contact with RRCAT at all stages of the contract in
order to resolve any technical issues or problems that arise, in the most timely and efficient
manner.
17.3 Contract person
At the start of the contract the supplier shall assign a person (contract person) who will be responsible
for all reporting to, and contact with RRCAT.
17.4 Contract phases and milestones
The contract will be divided into three phases.
A. The first phase will include magnetic, mechanical, electrical, controls, safety interlocks and
vacuum design of the Undulator Systems. This includes magnetic field calculations and
simulations allowing RRCAT to evaluate the design. The design will also include mechanical
calculations and simulations to prove the validity of the mechanical design of the undulator-
girders and vacuum chamber.
1. The design will include detailed drawings of the girder and support structure including
magnets, vacuum chamber and its support structures and lifting frame. This includes general
assembly and all part drawings.
2. The electrical layout, control and safety interlocks architecture and scheme including control
loops.
3. Details of alignment facilities for alignment of undulator and vacuum chamber.
4. Adequacy of the motor sizing for torque and speed through analytical calculations.
5. The supplier must establish analytically adequacy of the selected absolute encoders’ accuracy
and resolution to achieve the required gap measurement accuracy mentioned in Table -1 and
Table-2.
6. Scheme of synchronization of the gap drive mechanism to avoid possible locking of drive
system/ball screw.
7. An outline of maintenance, operation and hazard management documents.
8. A complete list of components.

24
9. A detailed manufacturing and testing programme.
10. Inspections and test schedules, including the plan for factory tests.
11. Description and documentation of materials including the critical parameters (e.g. type of
permanent magnet material, variation of permanent magnet block to block magnetization
strengths and its direction etc.).
12. The on–axis photon flux and the photon flux through an aperture should be provided by the
manufacturer for all the dominant harmonics. The tuning curves for the designed undulator
should also be provided by the manufacturer.
13. Confirmation of full details of factory acceptance testing and schedule of activities.
After the award of the contract, a Preliminary Design Report (PDR) incorporating above mentioned
points is to be submitted by the supplier to RRCAT. RRCAT will go through the PDR and thereafter a
review meeting will be held with the supplier. At this review, the supplier will present their proposed
design solution for the magnetic design, output radiation characteristics, the mechanical support,
girder design, holder design, vacuum system design, control, instrumentation etc. The supplier will
also present a plan for the execution of the contract and a Quality Assurance Plan. During this review,
the supplier must be able to clarify (with justifications/technical merit) all queries (raised by the
purchaser) related with the design of the Undulator System. The integration of the designed Undulator
System into the storage ring Indus-2 will also be evaluated and discussed with the supplier and may
request for modifications of the design (if necessary). RRCAT will review the design and installation
issues and may suggest for modifications, if necessary. However, the responsibility of meeting all the
technical specifications lies solely with the supplier. All the modifications made in the PDR will be
incorporated in the Final Design Report (FDR).
The FDR will be approved by RRCAT in writing. Once the design is approved, any deviation from
the approved design will not be entertained. Under unavoidable circumstances, the deviations may be
permitted only on written approval by RRCAT. The fabrication of the Undulator System shall be
initiated only after written approval of FDR by RRCAT.
B. The second phase will include:
1. Manufacturing of all the hardwares.
The construction materials used for fabrication of the undulator components must be
approved by RRCAT. The composition test report of the material used should be provided.
2. The supplier shall send inspection reports of all the critical components to RRCAT.
3. Assembly.
4. Characterization and testing at factory as defined in section 20.3 and section 20.5.
5. Inspection and verification by RRCAT representatives at factory site.
C. The third phase will include:
1. Delivery to RRCAT.
2. Installation and commissioning at the Indus-2 site.
Delivery to RRCAT shall not commence until successful completion of all Factory Acceptance Tests
and written authorization by RRCAT.

25
17.5 Safety and hazard management
17.5.1 The supplier shall carry out a safety assessment of the equipment (vacuum chamber,
undulator as well as power supplies and racks, etc.) and its operation. This shall be fully
documented in the corresponding manuals.
17.5.2 RRCAT requires suppliers to employ hazard management techniques to reduce the risk of
personnel becoming injured as a result of interaction with the equipment. This has to be
addressed in the operation manual mentioned in the deliverable documentation.
Consideration should be made of hazards that exist at all stages of the life of the equipment,
including installation, commissioning, operation, maintenance and repair.
17.6 Drawings
The supplier shall provide two full sets of paper copies of the final functional mechanical and
electrical drawings. The supplier shall also provide two full sets of electronic copies of the functional
mechanical and electrical drawings (preferably in DWG/SolidWorks format) on a CD or DVD. The
supplier must note the changes, where deviations from the information or dimensions contained in the
manufacturing drawings is authorized by RRCAT during manufacture. The supplier should update all
drawings of the final design report according to the production.
17.7 Manuals
Detailed installation, operation and maintenance manuals in English (Hard and soft copy) shall be
prepared for the systems. Detailed assembly/disassembly and alignment instructions, routine
maintenance requirements, fault diagnosis instructions, start-up and conditioning procedures shall be
included in the manual. Appropriate mechanical, electrical and controls schematic drawings/diagrams
shall also be provided.
18 Packing and delivery
18.1.1 The supplier may advice the preferred mode of transportation to RRCAT. The suppler has to
provide the detailed lifting and handling instructions.
18.1.2 The supplier shall ensure that all items in the scope of supply are fully protected for any
rough handling during loading, unloading, shifting, and transportation to RRCAT. Packing
cases shall be suitably designed to take care of impact during handling and transportation by
sea/air as the case may be. Packing should be suitable for storage of the items in a tropical
climate. Suitable stiffener and cushion should be provided to prevent the movement or
vibration of the items during transportation.
18.1.3 Shock and tilt indicators must be fitted to reveal evidence of any mishandling during
transportation from the supplier’s premises to RRCAT.
18.1.4 Each package shall be properly labeled to indicate the type and quantity of material it
contains, the purchase order number, its dimension and weight and other necessary data to
identify the equipment related to the contract.
18.1.5 The approximate weights and dimensions of the individual components must be mentioned
in the tender documents.

26
18.1.6 Individual items weighing more than 30 kg shall be provided with sufficient lifting hooks
and/or be compatible with fork-lift trucks. If special lifting jigs are required, these shall be
provided by the supplier. To avoid off-centre lifting by forklift/crane, there should be a clear
marking of locations on the packing where the forks of forklift/slings/wireropes are to be
engaged.
18.1.7 After NEG coating and completion of factory acceptance tests the chamber shall be vented
and pressurized to ≥110 kPa with clean dry nitrogen (99.99% purity or better) and packed in
a suitable way for long-term storage (at least 3 months). All flanges must be blanked off with
standard Conflat flanges and copper gaskets.
18.1.8 Water in cooling circuits must be completely removed and dried out before shipment.
18.1.9 Outer surfaces of the vacuum chamber shall be protected adequately to avoid any dent and
scratch etc. during handling and shipment.
18.1.10 The specific details of delivery and transportation of the undulator system must be discussed
with RRCAT and agreed upon in writing.
19 Installation and commissioning
Installation of the Undulator System in Indus-2 is responsibility of the supplier. Before installation
commences, the supplier shall supply RRCAT a full scheme of installation and the requirements.
After installation, all the functionalities of the undulator have to be demonstrated by the supplier.
20 Quality assurance and testing
20.1 Reliability and maintainability
The life time of the supplied undulator will be 20 years of continuous service in Indus-2 storage ring
environment. The supplier shall satisfy this requirement by specifying routine maintenance
requirements and replacement of limited number of wearing parts.
20.2 Quality Assurance Programme
20.2.1 The supplier shall provide and implement a quality assurance program compliant with ISO-
9001 or equivalent for the design, manufacture and testing of all systems and equipment
provided by them, which includes carrying out all relevant inspections and tests.
20.2.2 The supplier must provide a Quality Assurance document for the supplied equipment,
certifying that it conforms to the specification and the supplied engineering drawings, and
containing all material certificates, the results of all inspections and tests, and the procedures
used.
20.2.3 RRCAT shall be entitled to witness all inspections and test carried out under the terms of this
contract. The supplier must notify RRCAT at a suitable time in advance of any such
inspection and test.
20.2.4 Inspection and approval under the terms of this specification shall not relax the supplier from
any responsibilities under the terms of the contact.

27
20.3 Factory acceptance test for U-3 undulator
20.3.1 The factory acceptance tests must be completed successfully at supplier’s premises before
shipment. The measurement method and intended equipment used must be approved by
RRCAT. It is the responsibility of the supplier to provide all the necessary equipments and
manpower for this task. The tests at the factory must establish that all items of the
manufactured equipment completely meet the performance requirements as described in this
document. The factory tests must in addition to mechanical and magnetic tests also
demonstrate functioning of motors, encoders, interlock and electronics in general. The
supplier must facilitate the representative/s of purchaser to witness a few or all the factory
acceptance tests. All the test reports (in original) must be made available to representative/s
of purchaser.
20.3.2 The supplier will perform a set of magnetic field measurements to characterize the field
quality of the undulator at various pole gaps. Measurement must be done at 15 suitable pole
gaps between the minimum gap (corresponding to 300 eV output radiation for circular
polarization) to the maximum operating gap (corresponding to 1100eV, 1st harmonics, output
radiation) at a mutually agreeable controlled room temperature or at 260C ± 1
0C. In addition
to this measurement must be done at 5 more different pole gaps between 70 mm to 110 mm
pole gap.
20.3.3 Along the longitudinal (s) direction magnetic field measurement must start at a point outside
one end of the undulator, scan the full length and stop at the other end. Both the end points
start and stop must be outside of the undulator where the field is 0.01 % of the peak nominal
field. Field will be measured along the ‘s’ direction with a step not more than 2mm. We will
call this as longitudinal scan. Longitudinal scan must be done at all pole gaps on the axis. At
least three suitable pole gaps (23, 30 and 40 mm), longitudinal scans must be done within
±20mm and ± 3mm in the horizontal(x) and vertical (y) directions, respectively using
suitable measurement set up. Exact step size and gap will be agreed upon during FDR.
20.3.4 Complete sets of measurements must be repeated for at least two different pole gaps one
while opening and other while closing of the pole gaps to check the repeatability of the
measured data. Repeatability of the first field integral must be better than ±15G-cm for the
same setting of the pole gap.
20.3.5 Supplier must provide RMS phase error as a function of pole gaps.
20.3.6 Supplier must calculate electron beam position and exit angle at 2.5 GeV for various pole
gaps.
20.3.7 Supplier must calculate effective peak field and magnetic force as a function of pole gap.
20.3.8 Supplier must evaluate (ΔB)rms /<B> as mentioned in Table 1 for at least 5 different pole
gaps.
20.3.9 Energy of the output radiation (fundamental) with confidence limit and the value of Krms with
the variation of pole gap must be tabulated based on the measured data.
20.3.10 All the field integrals and multipole components as described in Table-2 and Table-3,
respectively must be evaluated by the supplier from the measured data at all operating gaps.

28
These values must be evaluated for different phases and the values must be within the
specified limits.
20.3.11 Pole gap repeatability and the variation of the position of the undulator axis for all gaps must
satisfy the specified limits mentioned in the Table 1.
20.3.12 Data analysis shall be the responsibility of the supplier and must be done using the measured
field data. Both the soft and hard copy of the detailed report and the measured raw data must
be provided to RRCAT.
20.4 Desired accuracy of the magnetic field measurement system
20.4.1 Supplier may use any one or both of the following the measurement systems to
characterizing the undulator or the measurement systems must be approved by RRCAT.
20.4.2 Repeatability of the first field integral using Hall probe system should be better than 10 G-
cm. The positional uncertainties (non-cumulative) of the measuring bench along longitudinal
direction(s) should be chosen to satisfy the above requirement. Accuracy of field
measurement system in the specified field range should be mentioned and it should be better
than 0.02%. Before measurement it must be calibrated with respect to NMR probe. Supplier
should mention the details of the Hall probe used along with the calibration curve and date of
calibration.
20.4.3 For a flip coil or stretched wire system, repeatability better than 5 G-cm for the first field
integral is preferred. Accuracy for the first field integral should be better than 10 G-cm.
Details of the measurement set up and measurement accuracy of the field integrals and the
multipoles should be mentioned.
20.4.4 Certification of above equipments and measurements traceable to international standards
(ISO type certification or equivalent) must be provided. Where no such standards exist, the
basis used for calibration or verification shall be provided.
20.4.5 Supplier may suggest different measurement procedures but in any case a complete and
detailed measurement plan and associated equipment list must be submitted to RRCAT for
review and approval.
20.5 Factory Acceptance Tests for vacuum chamber
20.5.1 Vacuum tests
20.5.1.1 Visual inspection, vacuum performance and NEG coating tests shall be carried out as per
approved procedures.
20.5.1.2 For residual gas analysis uncontaminated UHV/XHV compatible RGA of sufficiently low
background shall be used or there shall be provision of differential measurement for
subtracting the background.
20.5.1.3 Vacuum testing procedure to be adopted shall be approved by purchaser.
20.5.1.4 Helium leak test shall be performed before and after the NEG coating process.

29
20.5.1.5 The actual film thickness and chemical composition of NEG coating will be assessed by a
measurement on a silicon test coupon and measured values of these parameters shall be
provided to purchaser as evidence.
20.5.2 Dimensional inspection
20.5.2.1 Vacuum chamber top and bottom wall thickness shall be monitored by a series of
measurements using an ultrasonic probe before, during and after machining and a final
report shall be provided. A certificate of conformity shall be submitted for other
dimensions.
20.5.2.2 To meet the stringent requirement of straightness of the vacuum chamber, suitable
supports/jigs etc shall be used during manufacturing, inspection and subsequent handling
and storage.
20.5.2.3 Prescribed tolerances for vacuum sealing faces of flanges shall be maintained.
20.5.3 Cooling water circuit tests
Hydrostatic test of the cooling circuit shall be performed (15 bars x 1 hour). The test shall be carried
out using de-mineralised water and the values shall be recorded manually.
20.5.4 Electrical Tests
A declaration of conformity for electrical tests of bake-out jackets (insulation & heater continuity test
and thermocouples function test) by the original equipment manufacturer/supplier shall be submitted
to purchaser for approval.
20.6 Site acceptance tests
Normal visual inspection and checks of standard accelerometers revealing mechanical damage
suffered in transit will be carried out at installation site. If required, RRCAT may characterize
(magnetic) the undulator before the installation.
20.7 Final Acceptance Tests
20.7.1 The Final Acceptance Tests will be carried out by the purchaser and will take place within 3
months from receipt of the consignment.
20.7.2 After delivery to RRCAT a visual inspection test will be done first to check for damage
during transport or for any other problems.
20.7.3 The final acceptance tests will include any or all of the tests specified in the preceding
sections of this specification.
20.7.4 In addition, NEG-coated vacuum chamber will be installed in the storage ring, the NEG
coating will be activated by vacuum bakeout and the vacuum performance will be measured.
20.7.5 For purpose of warranty, the final acceptance of installation is defined as the successful
completion of acceptance tests after installation in the storage ring to substantiate the
compliance with this specification.

30
20.7.6 It will be a condition of final acceptance that the supplier must have provided to the
satisfaction of RRCAT, full documentation as noted throughout this specification, to cover
all systems embodied within this contract.
21 Guarantee
The equipments shall be guaranteed at least for 18 months following the date of delivery, or 12
months from the date of commissioning at RRCAT, whichever is the latest.
22 Tendering
22.1 Tender evaluation
RRCAT will evaluate the bids taking into consideration the cost (Ex-works duly packed), the
technical aspects, management plan and delivery time along with supplier’s qualifications, post-
production support, the proposal itself as well as any other factors that RRCAT may consider
appropriate to its evaluation.
Suppliers must quote for all the items. Cost of installation and commissioning should be quoted
separately. Price comparison will be done on the total price including cost of installation and
commissioning. Payment for installation and commissioning will be made after successful installation
and commissioning. The schedule of installation and commissioning will be decided mutually,
considering our machine operation schedule.
22.2 Technical information required with the tender
The supplier shall provide sufficient information with the tender documents for proper evaluation of
the bid. A report that describes the design and engineering tools will be used, the proposed magnetic
measurements systems including the estimated accuracy, in sufficient details so that RRCAT can
review and assess the adequacy of the project proposal and the competence of the manufacturer. It is
essential that this information accompanies the tender response. In the absence of this information the
bid is liable to be rejected as non-compliant. In particular, the proposal should include:
22.2.1 General outline
• A fabrication plan, with an outline schedule, showing the design, manufacturing, testing,
installation and commissioning phases of the major components.
• A summary of any value-added services that can be provided.
• Additional equipments or facilities required.
• List of essential spares along with their cost which will be required in future for running
the undulator.
• The supplier should clearly indicate the specification or condition which can not be met
entirely or partially.
22.2.2 Management plan and supplier’s qualifications
• Details of the quality control protocol that the supplier will apply.
• A list of previous similar or comparable projects, in size and scope, to enable RRCAT to
assess the supplier’s ability, experience, competence and reliability to accomplish the

31
contract. Detailed references (company name, contact name and email) of similar
contracts, executed by the supplier, are to be mentioned.
• Clear indication of the effort that RRCAT has to dedicate to install and operate the
undulator at the Indus-2 site.
22.2.3 Engineering and Manufacturing Information
• The preliminary design including: full description, and technical and economic
justification.
• Basic details of the magnetic system including the holders, and methods for assembly
and fixing etc.
• Basic details of drive system, associated motor systems, encoders, power supplies,
control electronics, software etc.
• Outline proposal for the method of fiducializing the reference surfaces to the magnetic
axis and magnetic mid plane.
• Details of equipment and infrastructure that will be used to carry out the characterization
and factory acceptance tests.
22.2.4 Delivery and Installation
• Description of any additional handling requirements during installation, testing and
commissioning.
• Details of the largest dimensions and weights of individual components to be installed.
22.2.5 Supplier must answer the following questions in terms of only 'yes' or 'no'
Original manufacturer of PPM Undulator.
Supplied similar devices made of PPM to the light sources of international reputations.
Capable of measuring all the field integrals of Table 2 with the specified accuracy.
Capable of measuring all the multipole components of Table 3 with the specified
accuracy.
Magnet blocks must be bought from an internationally reputed company having ISO or
equivalent type of certification or from the manufacturer approved by RRCAT.
Supplier accepts the presence of RRCAT representatives during test and measurements.
22.2.6 Maintenance and after sales service
Supplier should also quote separately for annual maintenance of the undulator system after the
warranty period. The supplier should provide the information/catalogue of the various items used e.g.
magnet blocks, driver motor, encoders, bakeout jackets, controlled unites and other stand alone parts
to be used in U-3 undulator system. A list of spares needed for trouble free operation for at least 5
years should be provided. List of critical spares shall be mentioned. Price of the spares should be
quoted separately.

32
22.2.7 Mandatory Questionnaire to be filled in by the supplier and sent along with the quotation.
Questionnaires are for the purpose of selection of qualified manufacturers technically suitable for the
contract.
Incomplete and ambiguous responses will lead to the rejection of the offer. Supplier’s responses shall
be duly signed by the authorized signatory and properly stamped with the company seal.
For the Undulator
Description Requirements Offered (to be
filled in by the
supplier)
Energy of output radiation for
U-3 Undulator
300eV to1500 eV
(i) ~350-1000eV(1st
harmonic, circular)
(ii) 800eV onwards higher harmonic
RMS phase error ≤ 5 degree
1st vertical field integral | dsBy
| ≤ 50 G-cm
(on axis ≤ 30 G-cm)
2nd
vertical field integral | /dsdsBy | ≤ 8000 G-cm2
1st horizontal field integral | dsBx
| ≤ 50 G-cm
2nd
horizontal field integral | /dsdsBx | ≤ 8000 G-cm2
Integrated normal and skew multipole field components, x = ±15 mm in the operating range
Quadrupole ≤ |50| G
Sextupole ≤ |60| G/cm
Octupole ≤ |100| G/cm2
For NEG coated vacuum chamber
Item Purchaser’s Specified Value Supplier's
Offered Value
Chemical Composition,
Mechanical Properties
(Tensile strength, 0.2%
Proof Strength, %
Elongation and
Hardness)
Mill test / inspection certificate 3.1 as per EN 10204/
equivalent shall be submitted
Vacuum Performance
Requirements
Permissible Helium leak rate ≤ 1.0x10-10
mbar l/s
Specific Outgassing (desorption) Rate ≤ 1.0x10-12
mbar l/s cm2

33
Ultimate Pressure: ≤ 5.0x10-10
mbar
RGA Analysis :
(a) General contaminants defined by the sum of AMUs
39, 41-43, 45 and above, excluding those listed
elsewhere ≤ 1 % of the total pressure.
(b) Chlorine residue (sum of AMU 35 and 37) ≤ 0.1%
of the total pressure.
(c) Hydrocarbon residue (sum of AMUs 69 and 77) ≤
0.1 % of the total pressure.
NEG Coating
Characterization
NEG film nominal composition: Ti30V40Zr30 ±30%
(atomic %)
Average Coating Thickness: 1.0 micron (variations
±20%)

34

35
Appendix-I
UHV General Specifications

36
1. INTRODUCTION
Indus-2 is a 2.5 GeV synchrotron radiation source, which operates in ultra-high vacuum (UHV)
regime and produces a high intensity source of infrared, visible, ultraviolet and x-ray radiation.
This specification is for the use as a reference for the design, construction materials, manufacturing
technologies, cleaning, assembly and handling of components, chamber and assemblies for Indus-2
UHV system. This specification forms part of the tender specification that includes UHV components
as integral part of supply. Any deviation of the specification shall be agreed with purchaser.
2. DESIGN OBJECTIVES AND REQUIREMENTS
All components designed for use in Indus-2 UHV system have the goal to be capable of reaching the
ultimate pressure ≤ 5 X10-10
mbar unless otherwise specified in the contract specification.
The basic rule applied to UHV system design is to minimise gas load and to maximise effective
pumping speed.
Gas load is minimised by pursuing various steps like: minimizing the surface area exposed to vacuum,
proper surface cleaning and vacuum degassing of bulk material. The finish of any surface exposed to
vacuum shall be 0.8 μm (32 micro inches) or better.
Maximising pumping speed is not always achieved by simply increasing the nominal size of a
vacuum pump. The pumping capability can be enhanced by careful design of the assembly, installing
the pump as close as possible to the outgassing source and having good conductance of the pumping
ports and assembly. For conductance limited system it is better to use a distributed form of pumping,
rather than using a large lumped pump.
The elimination of trapped volumes is imperative for proper vacuum performance. A trapped volume
is a volume that connects to the main vacuum chamber by a very small passage. It becomes
increasingly difficult for molecules to make their way out through these small passages. As a result,
trapped volumes increase pump-down times because they act as a virtual leak to the system. Trapped
volumes must be identified and vented in all cases.
In designs where vacuum surfaces are to be plated with another material, extreme care with selection
of the plating material shall be taken to make sure that delamination or peeling of the plating does not
occur. Surface to be plated should be clean and free from defects which could give rise to trapped
volumes under the plating. It is always a good idea to prove the quality of plating by a high
temperature (i.e. at least 250°C) vacuum bake. Evidence of peeling or bubbling is then just cause to
reject the plating. If the plating is carried out by electroplating or any other process involving acids,
then a 450°C vacuum bake is recommended to remove acid residuals. An electroless process, such as
the "Dalic" process, or vacuum evaporation, sputter coating or similar is recommended wherever
practicable.
High heat load on the components in a vacuum is the cause of accelerated outgassing rates. The layout
of the pumping system must have the capability to maintain vacuum despite any fluctuations of the
gas loads.
The power density on the heated surface in the vacuum (absorbers, taper etc.) made from Oxygen-
Free High Conductivity (OFHC) Copper or GlidCop® should be kept below 15 W/mm2.

37
Water-to-vacuum joints must be prohibited. Cooling water circuits or pipes carrying any other liquid
of high vapour pressure, should always be designed in such a way that joints are vented to atmosphere
or to a secondary vacuum system.
In addition to these vacuum requirements it is important to study the design stability to avoid large
deformation of the system under vacuum, which may result that the system is unfit for the function it
has been designed for.
3. MATERIALS
Inside the vacuum, only UHV compatible materials must be used. Only metallic or ceramic materials
may be used in the construction of any component or system which interfaces with the vacuum
system. Elastomers or organic materials are not permitted unless approved by purchaser.
List of the mostly used UHV materials:
Stainless steels - AISI 304L, 304LN, 316L, 316LN, 321, 347
Noble Metals: Gold & Silver (Vacuum Cast, 99.999%)
Copper & Copper Alloys: Oxygen Free Electronic (OFE) grade Copper (UNS C10100), Class l or 2
(ASTM F68 for brazed components and ASTM 152 for gaskets), Oxygen Free Silver bearing (OFS) Copper
(UNS C 10700), GlidCop AL-15 & Al-25 and, Be-Cu (UNS C17200)
Titanium & Titanium Alloys : Ti Gr-2 , Ti Gr-5
Nickel & Nickel Alloys : Nickel, Monel, Mu Metal, Inconel 600, Inconel 718
Aluminium and Aluminium alloys: AA5083-H321, AA6060-T6, AA6063-T6, AA6082-T6 & AA6061-
T6
Kovar : For mMetallised Alumina to Stainless Steel Flange brazed joints
High density Alumina
Beryllia
Sapphire
Glass
Other materials can be used only under specific approval of purchaser.
Casting in any form shall be strictly prohibited for vacuum chamber application
Any high vapour pressure metal (such as Zinc, Cadmium, Lead, etc.) is not allowed.
All vacuum components that are made of stainless steel, including "off the shelf' items, should be
checked for magnetic permeability as part of the quality control procedure. Permissible limit of
relative magnetic permeability shall be < 1.02 in a magnetic field strength of 80,000 A/m.
Stainless Steel type 321 is not suitable for applications requiring hydrogen firing or hydrogen brazing.
Knife-edge conflate flanges (CF) can be manufactured from electroslag refined (ESR) hot forged
austenitic stainless steel grade AISI 316L or AISI 316LN (depends on the application), however the
manufacturer is requested to specify & get approval for the choice he will adapt for the tender.

38
All forgings have to be forged in all axes in order to arrive to grain sizes < 3.5 according to ASTM E
112-88. After forging the forged parts are to be quenched in water. The material shall have a
maximum of 1 inclusion of type A, B or C and a maximum of 1.5 inclusions of type D according to
ASTM E 45-87. Forging shall be tested by ultra-sound testing over the entire volume according to
ASME V 23, SA-745. The material must be free from any cracks, lamination and folding etc.
The structure of these forgings shall be homogeneous, free from porosity and fully austenitic with less
than 1% ferrite. The presence of sigma phase of precipitated carbide is not permitted.
The material must show a Brinell hardness of 170-300 in the area of the sealing edge of the Conflat
flanges and the sealing surface of the Flat-seal flanges.
Knife-edge conflat flanges for Aluminium vacuum chamber shall be made out of UHV compatible
bimetallic (combination of AISI 316L & AA6061-T6) metal. Knife edge shall be machined on AISI
316L and AA6061-T6 side will be welded to vacuum chamber.
Flat metallic gaskets for CF flanges must be made of certified OFE (UNS C10100) grade Copper upto
baking temperature of 250ºC and OFS (UNS C10700) copper for baking temperature > 250ºC & upto
400ºC. Gaskets shall be silver plated to avoid galling.
Bolts used must be of austenitic stainless steel AISI 316 (A4-70) and silver plated.
Within magnet apertures vacuum chamber walls are required to have very low relative magnetic
permeability ≤1.02. Where the permeability is specified, the contractor shall supply a permeability
test certificate for a sample taken from each batch of material used.
For any material exposed to UHV, material certificates shall be required. These should state the
material specification, ladle analysis, room temperature mechanical properties and surface finishing
process used, and any other properties if clearly specified in the contract.
All materials shall confirm to relevant ASTM/equivalent standards.
4. MACHINING
Surface finish of machined UHV components like flanges etc shall be achieved by cutting tools only.
Use of grinding wheels, emry paper and abrasives polishing etc is strictly prohibited.
Use of sulphur bearing oils is prohibited, water based and sulphur free cutting lubricant should be
used.
Internal surfaces exposed to the vacuum must be free of micro inclusions, cracks, oxides and
impurities. Surface roughness of vacuum exposed surface must be better than N7.
5. WELDING
Weld quality is an important characteristic for the performance of UHV chamber. All welding
operations will be carried out in a clean room of Class ~ 10000. This area will be separated from the
machine shop.
Argon Tungsten Inert Gas (TIG) shall be used for welding all the permanent joints. Welding shall be
done in a manner equivalent to a generic welding procedure specified and qualified under the rules of
the ASME Boiler & Pressure Vessel code Sec-IX. A copy of the welder qualification record shall be
made available to purchaser for their approval.

39
Weld test coupon as per ASME code Sec-IX of the material to be welded shall be fabricated by the
fabricator for conducting the mechanical and joint integrity testing.
Argon gas of high purity (99.995% min) with low moisture content (dew point of -24ºC or lower)
shall be used for shielding as well as purging the hot root from the rear side.
Welds should be regular, continuous, non porous and every attempt should be made to reduce the
width of the 'transition' region along each side of the weld.
As far as possible vacuum sealing welds should be made from the vacuum side of the chamber only.
In case of inescapable need for welding from atmospheric side, a full penetration weld with purging
of argon gas inside the vacuum chamber must be envisaged, in order to prevent oxidation.
External discontinuous structural welds are suggested.
Whenever possible, single pass welds should be used.
If structural welds must be executed inside the vacuum (e.g. for assembling different parts inside the
chamber), these welds should be made discontinuously. These structural welds should not cross the
sealing ones.
Before welding all the parts must undergo a cleaning procedure.
Maximum effort is required to avoid oxidation of the internal surfaces of welds. All TIG welds are
purged and backed with purity Argon gas.
Autogeneous welding (without filler metal) recommended, but in case of absolute necessity filler
metal as per ASME/AWS standard and with prior approval of purchaser shall be used.
Finished welds must not be ground; brushing with a cleaned stainless steel wire brush is allowed.
All vacuum sealing weld joint must qualify the Helium leak test requirement. Helium leak rate must
be ≤ 1 X 10-10
mbar l /s.
The use of dye-penetrant is strictly forbidden.
The aluminium chamber and parts are welded using AC tungsten-inert-gas (TIG) welding processes.
The relative humidity of the welding room is maintained at ≤ 40 % during the welding.
6. BRAZING
The brazing filler alloys must be composed of materials with saturation vapour pressure minor than
10-3
Pa at the brazing temperature; no organic content is allowed; lead, zinc and cadmium are also
prohibited.
Brazing materials must be cleaned according to the same procedure as used for other components.
The vacuum brazing oven must have a temperature control system with a precision better than ±5°C,
it must have installations providing safety against sudden pressure increases or leaks; the brazing jig
and associated fixture devices must be appropriate.
The brazing temperature and the absolute residual pressure must be recorded for the complete brazing
cycle. In addition, relevant facts must be entered in a log. The recorder paper tape and the log must be
presented together with the finished module for provisional acceptance by purchaser. The brazing
process must be performed at a temperature lower than 850°C.

40
The following alloys can be used:
Cusil (Ag 72% - Cu 28%) brazing temp. 820°C
Incusil A.B.A (Ag-Cu-In-Ti) brazing temp. 750°C
The brazing cycle must be programmable. Brazing must be carried out under 10-3
Pa residual gas
pressure. The total residual gas content due to hydrocarbons or any other diffusion pump vapour must
not exceed 10%.
The specification for the brazing process must be proposed by the manufacturer for purchaser's
approval. The execution of the brazing process is entirely a responsibility of the manufacturer. The
quality of the brazing must be such that normal handling and transportation of components will in no
way effect their stability.
The manufacturer is strongly suggested to perform some preliminary brazing tests before the final
brazing. Brazing using torch is not allowed.
7. STANDARDIZATION OF MAIN MECHANICAL COMPONENTS
All the knife edge Conflat (CF) flanges must be made of austenitic stainless steel grade AISI 316L or
AISI 316LN; Design of CF flanges shall confirm to ISO/TS 3669-2. Purchaser reserves the right to
require machining drawings for each type of flange together with material quality control certificate
including chemical analysis, mechanical properties and ferrite rate. The name of the producer and the
indication of the material used must be indicated on all the flanges.
CF flange holes must not be threaded; if it is absolutely necessary to use threaded holes (gate valves,
zero length reductions, etc.) these flanges must be assembled by means of stud bolts (type UNI
5909/5919) chose accordingly to geometric characteristics of flanges and threaded holes. All the bolts
must be silver plated according to UNI ISO 4521. Bolts used for threaded holes in aluminium
chamber shall be without silver plating. Unless otherwise specified, the standard stainless steel bolts
which are necessary for the final flange assembly shall be A4-70 Class, according to UNI 7323
standard or similar; hexagon screws heads are requested. Be-Cu (UNS C17200) thread inserts shall be
used for threaded holes in Aluminium chamber.
Screws must be chosen as follow:
DN 16CF flange: M4 x 20 mm totally threaded screw
DN 40CF flange: M6 x 35 mm partially threaded screw
DN 63CF flange: M8 x 50 mm partially threaded screw
DN 100CFflange: M8 x 55 mm partially threaded screw
DN 160CF flange: M8 x 55 mm partially threaded screw
DN 200CF flange: M8 x 60 mm partially threaded screw
DN 250CF flange: M8 x 60 mm partially threaded screw
For flanged ports the purchaser strongly suggests the ‘free’ lengths (minimum distance between the
rear face of the flange and the vacuum chamber) and bolt tightening torques for the CF flange joints
as given in following table. All gaskets for UHV "knife-edge" type flanges must be made from

41
certified grade OFE (UNS C10100)/OFS (UNS C10700) copper, ASTM B 152. The material must be
free of blemishes and the nominal thickness must be 2.0 ± 0.1 mm. The temper of the gaskets must be
1/4 hard (hardness of 60-84 on Rockwell f scale) and they must fulfil the dimensional specifications
as given in following table.
Flange size ‘free’ length (minimum
distance between the rear
face of the flange and the
vacuum chamber)
Gaskets size Recommended
bolt tightening
torques OD (mm) ID(mm)
DN 16CF flange 30 mm 21.28 - 21.30 ≥ 16.2 10 Nm
DN 40CF flange 45 mm 48.14 - 48.15 ≥ 39 16 Nm
DN 63CF flange 60 mm 82.30 - 82.35 ≥ 63.6 20 Nm
DN 100CF flange 65 mm 120.38 - 120.40 ≥101.65 20 Nm
DN 160CF flange 65 mm 171.15 - 171.20 ≥ 152.5 20 Nm
DN 200CF flange 70 mm 222 - 222.10 ≥ 203.3 20 Nm
DN 250CF flange 70 mm 272.98 - 273 ≥ 254.0 20 Nm
All the stainless steel pipes (OD ≤ 100 mm must be obtained without weldings; purchaser suggests the
following dimensions :
OD 19.00 x 1.5 mm (preferred) OD 19.05 x 1.24 mm
OD 42.40 x 1.60 mm
OD 70.00 x 2.00 mm
All the other stainless steel pipes (OD > 100 mm) can be obtained by welding; in this case the
suggested dimensions are:
OD 108.0 x 2.9 mm
OD 156.0 x 3.0 mm
OD 206.0 x 3.0 mm
OD 256.0 x 3.0 mm
Bellows different from the types suggested by purchaser can be used only after the approval of
purchaser. In any case bellows must never be handled without clean gloves (both in the inner and in
the outer surface); particular care must be taken in order to avoid that manufacturing products or dust
can fall inside the bellows. They must never be forced by axial torques; therefore particular care must
be taken during assembly.
Cooling pipes must be made of OFE (UNS C10100) copper.
All the microswitches must be bakeable types.
All the flanges that are not used must be closed with blank flanges.

42
8. CLEANING
The vacuum components, before the final assembly, must undergo a suitable cleaning and washing
treatment, in order to reduce specific outgassing (desorption) rate. The following UHV cleaning
treatments are suggested but not binding. Cleaning procedure adopted by the supplier shall be
approved by the purchaser.
8.1 Stainless Steel
a) Wiping off of largest dirty patches.
b) Degreasing treatment by means of a waterjet cleaning machine with a detergent at 60°C.
c) Washing in alkaline solution (pH 11) at 65°C, with ultrasonic treatment (15 minutes).
Alkaline detergent solution, type Almeco 18 or Permetal77 (Henkel) or equivalent.
d) Rinsing in tap water.
e) Rinsing in demineralized water (conductivity ≤ 5 µScm-1
)
f) Drying in hot air oven at 100°C.
g) Cooling to room temperature in a ventilated, dust-free room or enclosure.
h) After cooling, clean components must be wrapped in aluminium foil and sealed in clean
polythene bags.
8.2 Aluminium
a) Removal of gross contamination by wiping.
b) Immersion in perchloroethylene vapour (120°C)
c) Rinsing in tap water (water jet cleaning machine)
c) Ultrasonic cleaning (2 minutes) in alkaline detergent (pH 9.7) at 65°C; the detergent is
Almeco 18 (3%) supplied by Henkel A.G.
d) Rinsing with cold demineralised water jet (conductivity ≤ 5 µScm-1
)
e) Drying in a hot filtered air oven at 150°C
f) Cooling to room temperature in a ventilated, dust-free room or enclosure.
h) After cooling, clean components must be wrapped in aluminium foil and sealed in clean
polythene bags.
8.3 Copper
a) Wiping off of largest dirty patches
b) Washing with citric acid (25% vol.). The use of protective gloves is required.
c) Washing in alkaline solution (pH 11) at 65°C, with ultrasonic treatment (20 minutes).
Alkaline detergent solution, type Almeco 18 or Permetal77 (Henkel) or equivalent.
d) Rinsing in tap water.
e) Rinsing in demineralized water (conductivity ≤ 5 µScm-1
).
f) Drying in hot air oven at 100°C.
g) Cooling to room temperature in a ventilated, dust-free room or enclosure.
h) After cooling, clean components must be wrapped in aluminium foil and sealed in clean
polythene bags.

43
After cleaning, SS components shall be vacuum-fired (degassed) at 900ºC for 1 to 2 hr to remove all
the dissolved gases (especially hydrogen).
Flange assemblies should have parts protected with blanking flanges and copper gaskets or aluminium
foil, polythene bags and hardboard discs.
Different cleaning treatments can be followed only after approval of purchaser.
9. HANDLING, ASSEMBLY, INSPECTION AND STORING
Inspection and assembly of Clean UHV components shall be done preferably in a class 10000 laminar
flow hood or in a 10000 class clean room.
The complete assembly of the whole UHV system shall be done preferably in a 100000 clean room or
in a clean area suitable for UHV.
In any case the following conditions must be followed:
1. In the area where the assembly is performed must be forbidden to smoke, eat or cook foods.
2. Suitable dresses must be used, in particular overalls, caps, overshoes and gloves that must be used
only in the assembly area and replaced quite often.
3. All the tools that are used should be cleaned and degreased. All the supports and tools that can be
in contact with the UHV surface of the components must be made of stainless steel.
4. Cranes or other similar devices must be protected in order to avoid leakage of lubricants.
5. Individual components and welds which are not accessible separately after mounting shall be
helium leak tested before final assembly.
6. After cleaning, each component will be wrapped in aluminum foil and sealed in clean polythene
bag.
7. After each vacuum test, the vacuum component must be vented & blanked-off by pure & dry
nitrogen.
10. LABELING, PACKING, PROTECTION AND TRANSPORT.
The vacuum chamber must be labelled and given a serial number for reference inscribed at a straight
part of the chamber close to the flange at the upper outer wall. The marking process must be carried
out by dry scribers vibrating engravers or laser engravers.
Knife edge CF flanges shall be protected using protective plastic cover to prevent damage during
transit.
Components must be properly supported and contained to prevent damage and contamination during
transit. The vacuum chamber must be supplied in appropriate packaging. Supplier shall obtain the
prior approval of purchaser for the details of the carriage and packing procedure to be implemented.

44
Applicable Drawings
OUTSIDE OF RING
INSIDE OF RING
1
2
3
2200
Ø203
NTS
VINOD 10.10.13
DRG.NO.-RRCAT\UHVTD\IND2\IDVCU\02
NEG COATED VACUUM CHAMBER-ASSEMBLY
ACCELERATOR PROGRAMME
RAJA RAMANNA CENTRE FOR ADVANCED TECHNOLOGY
GOVERNMENT OF INDIA
UHVT DIVISION
BILL OF MATERIAL
ITEM
NO.ITEM MATERIAL QTY REMARKS
1
2
3
4
CHAMBER BODY
DN160 CF FLANGE (BIMETALLIC)
M8 SOCKET HEAD THREADED PLUG
WITH ALUMINUM WASHERSS316L
AA6060-T6
AA6061-T6
AA6061-T6
01
02
04
04
NOTE:
1. ULTIMATE PRESSURE <5x10 mbar
2. FOR CLEANING & ASSEMBLY PROCEDURES : REFER UHV GENERAL SPECIFICATIONS
3. 'L' STANDS FOR HELIUM LEAK TIGHT JOINT - PERMISSIBLE HELIUM LEAK RATE FOR THIS WELD JOINT MUST BE
<1x10 mbar l/s AT ROOM TEMPERATURE
4. PERMISSIBLE THERMAL OUTGASSING (DESORPTION) RATE <1x10 mbar l/s Sq. cm
5. VACUUM SEALING FACES TO BE FREE FROM RADIAL SCRATCHES & TO BE
PROTECTED DURING HANDLING AND TRANSPORT
6. ALL VACUUM SURFACES TO BE FREE FROM VISIBLE DEFECTS SUCH AS PITTING,
CRACKS & INDENCATION ETC.
-10
-12
-10
ELECTRON BEAM DIRECTION
±1.0
D D
SECTION-DD
E E
SECTION-EE
4
7. REMOVE BURRS AND SHARP EDGES UNLESS OTHERWISE SPECIFIED
0.3
-A-
0.2
A
-B
-
0.2
B
8. ALL THE DIMENSIONAL & GEOMETRICAL TOLERENCES SHALL BE CHECKED IN PROPERLY SUPPORTED CONDITION
REFER
SHEET 2 OF 4
0.2
A
REFER
SHEET 4 OF 4
REFER
SHEET 3 OF 4
ELECTRON BEAM DIRECTION ELECTRON BEAM DIRECTION
SS316L
5 DETACHABLE STIFFENERS AA6061-T6 04
6M6 ALLEN SCREWS
SS316L 32
4 P
LU
GS
, TIG
WELD
ED
(W
ATER
TIG
HT)
6
5
REFER
SHEET 4 OF 4
STD. ITEM
7 M6 Be-Cu INSERTS (8mm LONG) Be-Cu 32 STD. ITEM
NEG COATED 1MICRON. ±20% THK
9. WELDED STIFFENERS (NOT SHOWN IN THE DRAWING FOR CLEARITY) SHALL BE PROVIDED AT THE REAR SIDE OF THE END FLANGES.
10. DETACHABLE STIFFENERS MUST BE MOUNTED ON ITS PLACE IMMEDIATELY AFTER DN160 CF FLANGE WELDED WITH CHAMBER BODY.
L
NO STEP NOR
GAP PERMITTED
(ALL AROUND)
NO
STEP
NO
R G
AP
PER
MIT
TED
(A
LL A
RO
UN
D)
AC
AD
.REF.-
\IN
DU
S-2 2
011
\ID
\D
LD
\C
HA
MB
ER
U1
-U
2 R
EV
ISED
\TY
PE-I &
TYP
E-II U
HV
CH
AM
BER
.DW
G
STD. ITEM
SWAGELOCK CONNECTOR SS-8MO-1-4
(THREAD LENGTH 10mm)
D P YADAV 10.10.13
L
11. PROVISION OF FEATURES FOR MOUNTING TEMPERATURE SENSORS FOR OPERATIONAL REQUIRMENT (TO BE AGREED) SHALL BE PROVIDED.

45
33
35°
12
11
Ø6
A
A
1/4", BSP THREAD,4 NOS.
21
24.28 12 6
81
88
17
38
30
94
102
116
6 45 22.5
8.72
2152
-A-
±1.0
12 DEEP
0.2
B
0.2
A
0.2
0.2
A
-B
-
±0.6
±0.2
5
±0.5
±0.2
5-0.1
0
±0.4
5
B
SECTION-BB
NTS
VINOD 10.10.13
DRG.NO.-RRCAT\UHVTS\IND2\IDVCU\02
ACCELERATOR PROGRAMME
RAJA RAMANNA CENTRE FOR ADVANCED TECHNOLOGY
GOVERNMENT OF INDIA
UHVT SECTION
CC
SECTION-CC
NEG COATED VACUUM CHAMBER - CHAMBER BODY
0.3
M8
20
ELECTRON BEAM DIRECTION ELECTRON BEAM DIRECTION ELECTRON BEAM DIRECTION
110
B
24 15
8
M6x8 DEEP 8 NOs.
FLAT BASE WITH Be-Cu INSERT
CHAMBER BODY
1
INSIDE OF RING
OUTSIDE OF RING
N7
AC
AD
.REF.-
\IN
DU
S-2 2
011
\ID
\D
LD
\C
HA
MB
ER
U1
-U
2 R
EV
ISED
\TYP
E-I &
TYP
E-II U
HV
CH
AM
BER
.DW
G
NOTE:
1. RAW STOCK FOR VACUUM CHAMBER BODY SHALL BE ALUMINUM EXTRUSION MADE OF
ALUMINUM ALLOY AA6060 (EQUIVALENT TO EN AW - 6060/ DIN AlMgSi0.5)
3. CHEMICAL COMPOSITION SHALL CONFIRM TO EN 573-3 (DIN 1725)/Equivalent
4. TEMPER OF THE EXTRUDED PROFILE SHALL BE T6 AS DEFINED BY EN 515/Equivalent.
5. MECHANICAL PROPERTIES OF THE EXTRUDED PROFILE SHALL CONFORM TO EN 755-2/Equivalent
8. REMOVE BURRS & SHARP EDGES WHEREVER NOT SPECIFIED
6. DIE USED FOR EXTRUSION SHALL BE ULTRASONICALLY CLEANED TO AVOID SURFACE CONTAMINATION.
B
B
7. ALL BLIND TAPPED HOLES SHALL HAVE FLAT BASES.
D P YADAV 10.10.13
2. UNLESS WHERE OTHRRWISE STATED ALL TOLERANCES ON DIMENSION & FORM OF AS EXTRUDED PROFILE SHALL CONFIRM TO EN 12020-2/Equivalent
9. REFER DRG. NO. RRCAT\UHVTD\IND2\IDVCU\01 SHEET 3 OF 4 FOR CROSS SECTIONAL & END VIEWS AA & BB RESPECTIVELY.

46
NTS
VINOD 10.10.13
DRG.NO.-RRCAT\UHVTS\IND2\IDVCU\02
ACCELERATOR PROGRAMME
RAJA RAMANNA CENTRE FOR ADVANCED TECHNOLOGY
GOVERNMENT OF INDIA
UHVT SECTION
AC
AD
.REF.-
\IN
DU
S-2 2
011
\ID
\D
LD
\C
HA
MB
ER
U1
-U
2 R
EV
ISED
\TYP
E-I &
TYP
E-II U
HV
CH
AM
BER
.DW
G
20
M8
3
21
150
SECTION-AA
2xØ
6,
T
HR
U H
OLE
N7
-0.1
0.3
-A
-
0.3
A
+0.3
0.3
A
0.25
64
81
102
±0.6
17
15
30
±0.4
±0.5
88
94
102
±0.6
110
116+
0.1
-0.2
38
±0.25
R5x4
VIEW FROM BBCHAMBER BODY SECTIONAL VIEWS & PLUG
NEG COATED VACUUM CHAMBER
(AS SHOWN IN ASSEMBLY DRAWING)
(AS SHOWN IN ASSEMBLY DRAWING)
*
*TO BE COMPATIABLE WITH NEG COATING REQUIREMENT
D P YADAV 10.10.13
±0.8
±0.4
5
±0.25
±0.5
R2x4
M8 SOCKET HEAD THREADED PLUG
#
#
TOLERANCE ON OUTER DIMENSION (i.e.21) FLATNESS & PARALLELISM
TOLERANCES OF OUTER SURFACES SHALL BE COMPATIBLE WITH
R8.5
x2
WITH MINIMUM POLE GAP REUQUIREMENT OF UNDULATOR & HENCE MAY
BE MODIFIED SUITABLY AT THE TIME OF FINAL DESIGN REVIEW

47
10 11 10 12.5 12.5 10 12.5 12.5 10 11
122
10
26.5
36.5
1.5
210
210
R35
4Ø
10x8
CF FLANGE SUPPORT BRACKET
Ø6.3x8
18 15
45
5
4
NTS
VINOD 10.10.13
DRG.NO.-RRCAT\UHVTS\IND2\IDVCU\02
ACCELERATOR PROGRAMME
RAJA RAMANNA CENTRE FOR ADVANCED TECHNOLOGY
GOVERNMENT OF INDIA
UHVT SECTION
AC
AD
.REF.-
\IN
DU
S-2 2
011
\ID
\D
LD
\C
HA
MB
ER
U1-U
2 R
EV
ISED
\TYP
E-I &
TYP
E-II U
HV
CH
AM
BER
.DW
G
24x22SPOT FACE AT 4 PLACE
3x1
DEEP
LEA
K C
HEC
K G
RO
OV
E A
T 2
PLA
CE,
DIM
ETR
ICA
LLY O
PP
OS
ITE
BETW
EEN
TW
O H
OLES
Ø6H7
6
(Ø6 )
+0.012
-0.000
81
94
99
119
143
Ø171.4
PCD 181
Ø203
17
20 HOLES, Ø8.4
+0.20
0
0.4 P R
22
0.5x45°
-P-
0.05
0.1 P8 6
3.5 2
.5
38
43
63
103
R20x4
±0.1
+0.2
+0.1
±0.45
+0.4
+0.3
+0.20
+0.15
X
Ø166.1
Ø171.4
-R-
0.08 R
+0.20
+0.15
92°
20°
0.6
1.2
±0.05
N6
N6
N6
N6
0
+0
.10
0
+0
.10
0.1 P
DETAIL-X
# #
17.533.5 17.5 33.5
41.5
A A
SECTION-AA
M6x12 DEEP 8 NOs.
FLAT BASE WITH Be-Cu INSERT
DN160 CF FLANGE
2
N7
R10x4
R7.5
x4
R5x4
<R 0.15
NOTE:
1. REMOVE BURRS & SHARP EDGES WHEREVER NOT SPECIFIED
2. PROPER CARE MUST BE TAKEN IN HANDLING OF MACHINED FLANGE
16
6
M4x2 NOs.
DN160 CF FLANGE (BIMETALLIC) & SUPPORT BRACKET
NEG COATED VACUUM CHAMBER
3. ANY SCRATCH, DENT OR SCORE MARK ON THE SEALING SURFACE
SHALL BE LIABLE FOR REJECTION
4. PROTECTIVE COVER SHALL BE USED FOR COVERING THE FLANGE.
D P YADAV 10.10.13
±0.2
5