Embed Size (px)
DESCRIPTION
LCLS Undulator Controls. ANL LCLS All-Hands Meeting February 20, 2006 Josh Stein Argonne National Laboratory Advanced Photon Source ASD-Controls. Undulator Controls overview. Major control points for the LCLS Undulator Motion Joe Xu, Shifu Xu Diagnostics - PowerPoint PPT Presentation
Citation preview
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
LCLS Undulator Controls
ANL LCLS All-Hands MeetingFebruary 20, 2006
Josh SteinArgonne National Laboratory
Advanced Photon SourceASD-Controls
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Undulator Controls overview
Major control points for the LCLS UndulatorMotion
Joe Xu, Shifu Xu
DiagnosticsJosh Stein, Eric Norum (consultant), Till Strauman (SLAC)
Beam loss monitorsJosh Stein, TBD
Magnet Power SuppliesSLAC personnel, Tom Fohrs (consultant)
General data acquisitionJosh Stein
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Motion stages
Undulator AlignmentCam based system
Five cam stages per undulator segment
Challenging motion algorithms due to independent stages
No hard stops or definitive “home” position
Difficult to protect vacuum chamber against unanticipated motion extremes
“Hoop and wire” system under consideration
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Motion Stages
Undulator slideAllows removing of the undulator from the beam line
Traditional linear type sliding stages (dual single axis)
Interesting alignment problem using linear encoders for motion feedback as well as an alignment interlock
“Comparator” based system proposed using linear potentiometers
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
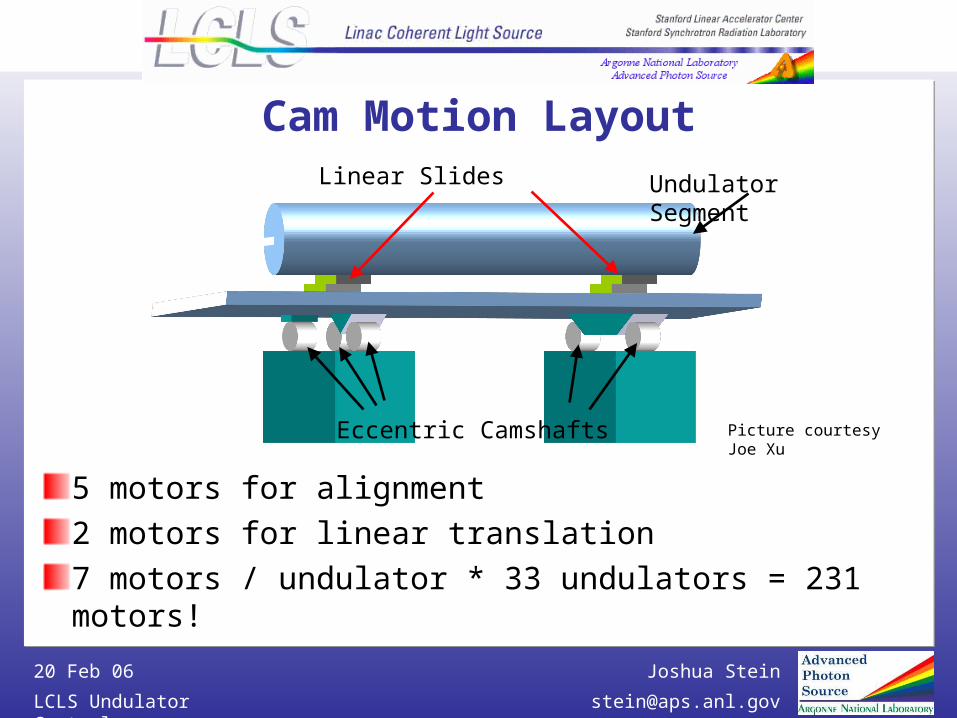
Cam Motion Layout
5 motors for alignment
2 motors for linear translation
7 motors / undulator * 33 undulators = 231 motors!
Eccentric Camshafts
Linear Slides Undulator Segment
Picture courtesy Joe Xu

Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Motion Control Status
Undulator motion design very matureField Based IOCs – one per undulator segment
In-tunnel placement minimizes large cable runsStand-alone operation and network booting via DHCP“Smart Motors” used message based control via serial portEncoder input via on-board ADC
Software design ~80% completeAlgorithm development completeEPICS Implementation in progress
Operator interface screens and scripts still need definition
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Diagnostics
RFBPMHigh precision (>12 bits effective) ADC required
BPM electronics dictate a sampling rate requirement of >60Mhz
Trigger rate maximum 120Hz
Must be able to trigger off of SLAC based timing system
New event system being created by LCLS/SLAC controls group based on SLS/Diamond timing system
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
BPM Controls Status
High speed ADC procuredEPICS support “expected”
Software tweaking may be necessary
Existing GTR support to be used for in-house testing and validation
ITS Support required soon
Expect to bring in outside help for effort

Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Diagnostics
Beam Finder Wire (BFW)Pneumatically operated sensor
“Standard” scanning wire system as used at SLAC
Beam strike on wire induces signal – monitored via control system (ADC)
Timing / event system integration required
Ancillary monitoring is possible via down-stream beam loss monitors (beam scattering)

Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
BFW Controls Status
“Standard” SLAC based scanning wire acquisition system to be used
“New” EPICS based scanning wire system under development by LCLS/SLAC
Investigation / design for the pneumatically operated sensor motion needs to be addressed
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Beam Loss Monitor
Ionization type beam loss monitorsDetectors placed as rough diagnostic to determine beam loss direction
High voltage bias
New application – new “product” – investigation ongoing
Possibly integrate a Fiber Optic radiation sensing system similar to that at TESLA
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
BLM Controls Status
Expect work to begin later this yearIonization chamber based system may require more controls design effort than originally anticipated
We expect to have a much better idea on what this system consists of within the next month
Similar research will be done with regards to the fiber-optic systemIntegration into the beam stop system of the injector is also required – needs definition
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Miscellaneous data acquisition
At present we expect to monitor about 10 temperature points for each undulator segment (including breaks)
Thermocouples and possibly (one or two) RTDs
A high data rate is not necessary, so dense multiplexing will be used to keep costs down
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
SLAC Controls effort
The LCLS Controls group at SLAC has had some interesting challenges as well:
Integrate existing SLAC based control system into a modern EPICS based IOC
Covert the SLC timing system into something more “modern”
Address the “novel” use of PLCs in safety systems
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Undulator Hall Issues
Equipment buildings on either end of (170m) Undulator Hall
Long cable runs (some exceeding 250 feet) dictate careful planningTwo buildings to house our equipment racks on either end of Undulator hall.Adequate planning for a possible second undulator line
Currently in the design phase with the LCLS Conventional Facilities group to assure we have adequate capacity:
Cable TraysPowerPenetrations
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
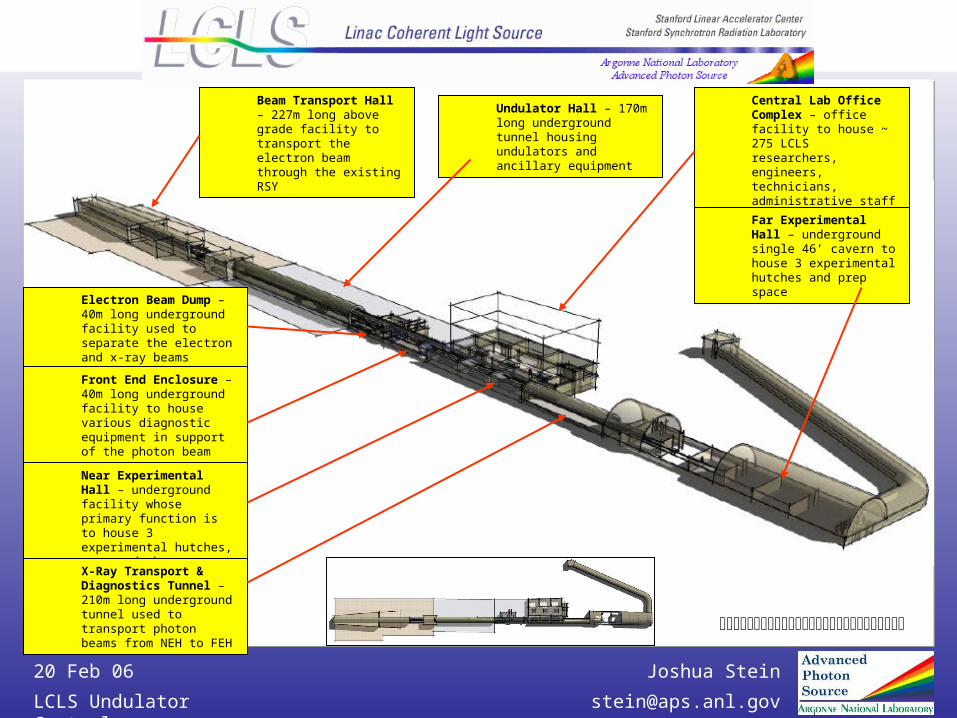
Beam Transport Hall – 227m long above grade facility to transport the electron beam through the existing RSY
Undulator Hall – 170m long underground tunnel housing undulators and ancillary equipment
Central Lab Office Complex – office facility to house ~ 275 LCLS researchers, engineers, technicians, administrative staff and visiting experimentalists
Far Experimental Hall – underground single 46’ cavern to house 3 experimental hutches and prep space
Electron Beam Dump – 40m long underground facility used to separate the electron and x-ray beams
Front End Enclosure – 40m long underground facility to house various diagnostic equipment in support of the photon beam
Near Experimental Hall – underground facility whose primary function is to house 3 experimental hutches, prep and shops
X-Ray Transport & Diagnostics Tunnel – 210m long underground tunnel used to transport photon beams from NEH to FEH
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
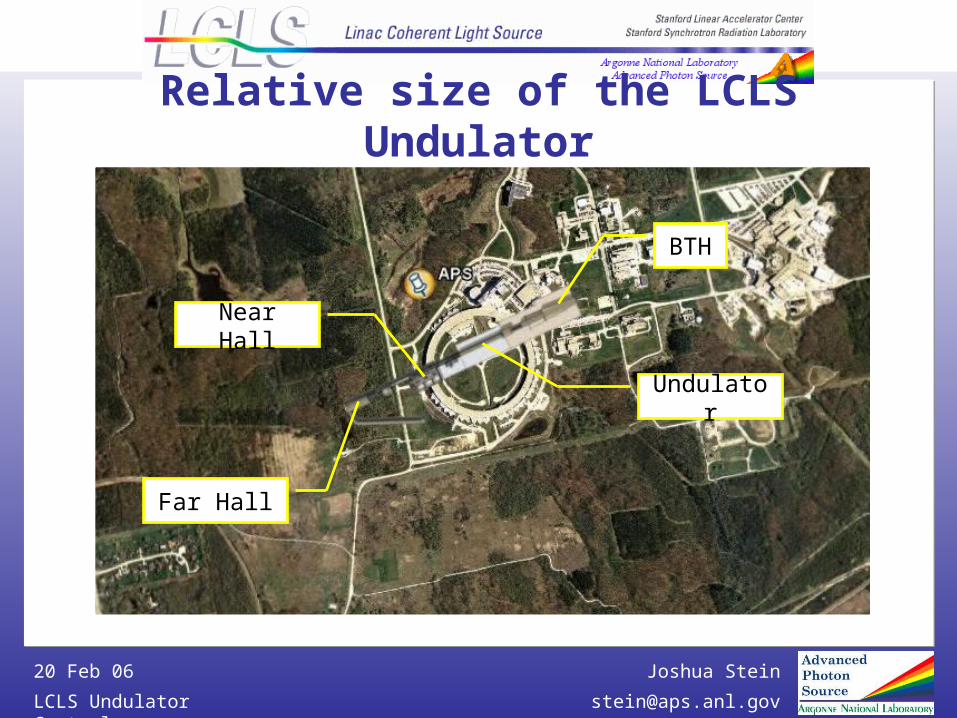
Relative size of the LCLS Undulator
BTH
Undulator
Far Hall
Near Hall
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Controls : Installation Planning
Along with careful planning of cabling and rack layout, an installation plan is required to assure no surprises during the final stages of construction and delivery at SLAC
Most of the hardware although specified and designed at APS, will be installed by SLAC personnel – documentation needs to be thorough and complete
We expect to rely heavily on the IRMIS tool suite as a design aid in this regard
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Near Term Goal : SUT
Support the installation of the Single Undulator Test system
Motion system
Cam calibration system
Alignment System support (esp. for position feedback)
Equipment rack mock-up (in tunnel)
Cable routing mock-up and testing
Conduct vigorous motion tests to assure adequate performance which meets or exceeds the PDR
Joshua Stein
LCLS Undulator Controls [email protected]
20 Feb 06
Undulator Controls : Conclusion
We have concentrated our efforts on the most challenging aspect of our scope : the motion system. With that well in hand, we will begin concentrating on:
BPM and BFW acquisitionBeam Loss integrationThermal monitoringInstallation planning
Interesting challenges are on the horizon!