Embed Size (px)
Citation preview
Elapsed drilling time (seconds)
Site 808
0
50
100
0
10
20
30
SWOB (Klbs)
DWOB (Klbs)
Cross Wavelet
DWOB/SWOB
Period (sec)
DWOB/SWOB
Ratio (filtered)
1248
163264
128256
-3.0
-1.5
0.0
1.5
3.0
Heave (m)
-0.50.00.51.01.52.0
20000 25000 30000 35000 40000 45000 50000 55000 60000 65000 70000 75000 80000 85000 90000 95000 100000 105000 110000 115000
50
100
150
Top Drive
Torque
AHC OFF AHC OFF AHC OFF AHC OFF AHC OFF
Seafloor
Simplified Depiction of a Heave Motion Compensator
Mounted on a Drillship
Cy
lin
de
r
Top
Drive
Cy
lin
de
r
Controller
Accelerometerle Drawworks
1. The heaving motion of the
ship is recorded by the
accelerometer and the data
sent to the controller.
2. The controller anticipates
the needed compensation and
issues the command to the
cylinders.
3. The variations in weight on
bit and torque are measured
near the bit and reviewed
during drilling and following
the drilling operation.
The long drill pipe can act like
a spring and lessen some of
the variability of downhole
drilling parameters.
Sensors mounted on the ship
measure a wide range of
drilling parameters that give the
driller good indication of what is
happening at the bit.
Heave motion compensators use
sensors, electronics, software,
large hydraulic cylinders and
pumps to decouple the motion of
the ship from the motion of the bit
while drilling. This is done to
maintain a near constant weight on
the bit while drilling. Ideally the
weight on bit should remain
constant for best coring results,
however this is extremely difficult, if
not impossible due the complex
nature of this task.
Weight on bit and torque
increase and decrease with
the heaving motion of the
ship
Sensors installed in the drill pipe
near the bit provide critical feed
back on the variation of downhole
weight on bit. These data are
transmitted up the drill string in
real time.
Heave
0.0 0.1 0.2 0.3 0.4 0.5
Frequency (Hz)
0
0.5
1
1.5
2
Pow
er
1173 Top Drive AmpsSpectrum for AHC ON and OFF
AHC OFF
AHC ON
AHC suppresses heave
effects in torque by factor
of 2.5
500
500
-0.6
0.0
0.6
0 100 200 300 400
0 100 200 300 400
Wavelet depicting Frequency change248
163264
128256
Period
Fourier transform depicting
frequency change
Wavelet depicting amplitude change
frequency
amplitude change
-1.8-1.2
-0.60.0
0.61.2
1.8
0 100 200 300 400 500
0 100 200
248
163264
128256
248
163264
128256
Pe
rio
d
frequency
Amplitude change
Time (seconds) Time (seconds)300 400 500
60
SWOB (Klbf)
0
10
20
30
40
DWOB (Klbf)
Site 808 SWOB - DWOBAHC On
4859-4916 mbrf4947-5012 mbrf5033-5117 mbrf5138-5213 mbrf 5234-5319 mbrf
5040
RAW DATARAW DATA
3020100
RAW DATARAW DATA
RAW DATARAW DATA
18000 18500 19000 19500 20000 20500 21000 21500 22000
Elapsed drilling time (seconds)
50
55
60
65
To
p D
rive
Am
ps
1173 Top Drive Amps (Torque)AHC ON and OFF
AHC ON AHC OFF
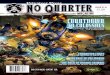
Characterization of the dynamics of ship heave and its effect on
downhole drilling and coring has been long sought after in the
Ocean Drilling Program. Operating in the Nankai trough region, the
JOIDES Resolution acquired new data of downhole parameters
using commercially-available Measurement-While-Drilling (MWD)
tools at two drilling sites. Our objective during ODP Leg 196 was to
record weight-on-bit, rate of penetration, torque, and pump
pressure near the bit as drilling proceeded. Digital instruments
installed on the rig floor simultaneously acquired vital surface
information of the drilling parameters. Although the sampling rate
afforded by the downhole tools is insufficient to resolve wave
periods of 8-10 seconds, longer wavelength changes are clearly
observed. Wavelet transform analysis was used to eliminate
window length restrictions with conventional Fourier analysis and
to retain the time-specific information recorded in the raw signal.
The integration of the uphole and downhole data sets and
subsequent wavelet analysis show less variation with heave than
in previous experiments near Antarctica where sea states reached
4 meters. The ratio of surface to downhole weight-on-bit for the
two data sets in the >30 second spectral window varies
systematically with changes in sea state, water depth, pipe depth
and driller input. We are thus able to study the effects and drilling
dynamics in changing sea states and in water depths up to 5500
meters and to evaluate the operation of the shipboard heave
compensation systems. As a result of these analyses, ODP is
deriving an empirical approach for operational use to describe
downhole and uphole drilling parameters under a variety of
conditions and in different geological environments.
Ship Heave Effects on ODP Drilling Dynamics: analysis of MWD data in the Nankai TroughGreg Myers1, Philippe Gaillot2, Dave Goldberg1 and the Leg 196 Scientific Party1 Lamont-Doherty Earth Observatory, Borehole Research Group, Palisades, New York
2 Université de Montpellier 2, Place Eugène Bataillon, Montpellier, France
1. ABSTRACT
2. OVERVIEW
6. CONCLUSIONS
Drilling
Pipe Change
Drilling
Pipe Change
3. ACQUIRED DATA
73000 74000 75000 76000 77000 78000 790000
1
2
3
Downhole Torque
(K ftlbs)
73000 74000 75000 76000 77000 78000 790000
10
20
30
DWOB
(Klbls)
Site 808Downhole Weight on Bit and Torque
Elapsed drilling time (seconds)
AHC ON
AHC ON
AHC OFF
AHC OFF
Site 1173
40
60
80
100
Top Drive
Amps
Surface WOB
30 sec (Klbs)
0
10
20
30
40
50
-3-2-1
012
3
Heave (m)
Elapsed drilling time (seconds)
0 10000 20000 30000 40000 50000 60000 70000
2.0
1.0
-0.5
0
Downhole WOB/
Surface WOB ratio
5
5
15
25
Downhole WOB
(Klbs)
Environmental Conditions
Site 1173Water Depth 5500m Sea State
<2M
Data Transmission Rate 12Hz (3.0 bps)
Sample Interval 4.9 sec
Site 808Water Depth 5500m
Sea State ~1m
Data Transmission Rate 16Hz (6.4 bps)
Sample Interval 2.5 sec
AHC OFF AHC OFFAHC OFF AHC OFF
Torque is
sampled lower
than once every 10
seconds. Downhole
weight on bit is sampled
once every 2 seconds which
allows higher frequencies,
such as heave to be
observed.
At low
frequency,
dowhhole torque
responds to heave
effects. The AHC
suppresses torque
by a factor of 2.5
Wavelets
offer some
advantages over the
Fourier transform in that
the time domain is perserved
so changes in signal
frequency and ampliitude
can be graphically
depicted at the time of
their change
Correlation
between DWOB and
SWOB is strong in all sea
states, with or without the
AHC. SWOB values are
roughly 2 times higher
than DWOB, over all
frequencies.
T41A-0852
Downhole WOB
is suppressed by the
AHC at heave periods of
10 seconds and higher.
DWOB/SWOB ratio is
approximately 0.4-0.5 at
these periods.
4. Results - Downhole Weight on Bit
Wavelet Transform Overview
DWOB(Klbs)
DWOB (Klbs)
43500 43600 43700 43800 43900 440005
10
15
20
Site 808 DWOBComparison of AHC On and Off
45500 45600 45700 45800 45900 46000Elapsed drilling time (seconds)
5
10
15
20
AHC OFF
AHC ON
Approx 10 sec period measured near the bit
10 sec period is suppressed
Downhole measurements made in real-time while drilling have been
demonstrated to be vital for determing the performance of heave
compensation equipment. Data was transmitted from 6000m depth
through the drill pipe at up to 6 bps and recorded at the surface using
MWD technology.
The Active Heave System installed on the JOIDES Resolution appears
to reduce downhole weight on bit and torque variations resulting from
ship motion by a factor of up to 2.6 under these test conditions.
Wavelet Analysis shows little reduction by the Active Heave
Compensation System of downhole weight on bit at long periods(0.5 to 2
min.)
A downhole measurement system with a higher sampling rate (<2 sec
for each measured parameter) is needed to further the investigation of
downhole drilling dynamics at higher frequencies.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14
Frequency (Hz)
0
0.1
0.2
0.3
0.4
0.5
Pow
er
Site 808 DWOB Spectra
AHC ON
AHC OFF
Ship HeavePeriods
AHC ON and OFF
AHC reduces avg.
DWOB variations in
the heave frequency
by a factor of 2.6
RAW DATARAW DATA
RAW DATARAW DATA




![3-PSR Mechanism Design, Parameter Optimization, and ...fccr.ucsd.edu/pubs/tdsob19.pdf[11 13]. Other ship motion replication mechanisms decouple heave from orientation, using lifts](https://img.pdfslide.us/doc/110x75/5f80e3c654dfb121d37108de/3-psr-mechanism-design-parameter-optimization-and-fccrucsdedupubs-11-13.jpg)
![Wave heave energy conversion using modular multistability Energy/wave heave modualr... · 2014-06-29 · Wave heave energy conversion using modular multistability ... [3–6], while](https://img.pdfslide.us/doc/110x75/5e3515fd28986c6ed857f62f/wave-heave-energy-conversion-using-modular-energywave-heave-modualr-2014-06-29.jpg)