Embed Size (px)
Citation preview

16
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
OFFSHORE ENGINEERING: AN OVERVIEW OFTYPES AND LOADINGS ON STRUCTURES
A S Kharade1* and S V Kapadiya2
Since the 1970s a need for deep water structure that would exploit energy resources such as oiland natural gas has arisen. Depending upon the depth of the sea water and as per therequirement, various types of platforms are designed. When deep water combines with hostileweather condition, necessary conventional fixed offshore structures require excessive physicaldimensions to obtain the stiffness and strength. The study considers some important forcessuch as wind, ocean wave’s buoyant forces, current loading and marine growth. Accurateprediction of the wave loadings on the structures is extremely important for design purpose forthat software's are introduced. Software analysis of the structure in every possible mannergives a desirable result which helps in designing the structure. Each part of the structure issimulated by considering actual and environmental loads on it. This paper highlights theengineering behind offshore structures through types and different loading conditions.
1 Department of Civil Engineering, TKIET, Warananagar, India.2 Department of Civil Engineering, GTU, Ahmadabad, India.
*Corresponding author:A S [email protected]
ISSN 2319 – 6009 www.ijscer.comVol. 3, No. 2, May 2014
© 2014 IJSCER. All Rights Reserved
Int. J. Struct. & Civil Engg. Res. 2014
Review Article
Keywords:Offshore, Wave loading, Wind loading, Forces, Oil and gas, Load simulation
INTRODUCTIONOffshore structures are constructed on orabove the continental shelves and on theadjacent continental slopes take many formsand serve multiple purposes such as towersfor microwave transmission, installations forpower generation, portable pipeline systemsfor mining the ocean floor and a few platformsand floating islands that serve as resort hotels.However, most of the offshore structureshowever have been built to support the
activities of petroleum industries. Exploratorydrilling is done from mobile platforms orcarefully positioned ships. Production andstorage operation involves more permanentstructures. Offshore platforms have many usesincluding oil exploration and production,navigation, ship loading and unloading, andto support bridges and cause ways.
These offshore structures must functionsafely for design lifetimes of 25 years or moreand are subject to very harsh marine

17
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
environments. Some important designconsiderations are peak loads created byhurricane wind and waves. The platforms aresometimes subjected to strong currents whichcreate loads on the mooring system and caninduce vortex shedding. Offshore platforms arehuge steel or concrete structures used for theexploration and extraction of oil and gas fromthe earth’s crust. Offshore structures aredesigned for installation in the open sea, lakes,gulfs, etc., many kilometers from shorelines.These structures may be made of steel,reinforced concrete or a combination of both.
Offshore platforms are very heavy and areamong the tallest man-made structures on theearth. The oil and gas are separated at theplatform and transported through pipelines orby tankers to shore.
The design of marine structures compatiblewith the extreme offshore environmentalcondition is most challenging and creative taskfor the ocean engineers. The marineengineer’s goal is to conceive and design alasting structure that can withstand the adverseconditions of high winds and waves,earthquakes, tsunami and ice effect. Thesestructures are analyzed in all possible mannersto avoid the loss of property and life of workersas they are situated long away from shore lineand constructed at a depth more than 200 m.
HISTORICAL PERSPECTIVEThe earliest offshore structure for oil drillingwas built around 1887 off the coast of southernCalifornia near Santa Barbara. This wassimply a wooden wharf outfitted with a ring fordrilling vertical wells into the sea floor. Moreelaborate platforms supported by timber pierswere then built for oil drilling, including
installation for the mile deep well in Caddolake, Louisiana (1911) and the platform in lakeMaracaibo, Venezuela (1927). Soon afterthese early pier systems were built, it becomeapparent that the lifetime of timber structureserected in lakes or oceans is severely limited,because of attacks by marine organisms. Forthis reason reinforced concrete replacedtimber as, the supporting structure for manyoffshore platforms up to the late 1940s. Overthe next 50 years about 12,000 platformsstructures were built offshore, usually of steelbut more recently precast concrete was used.
Offshore mooring system has a variety ofconfigurations. All have anchors or groups ofpipelines in the seabed with flexible lines,leading to buoys, ship or platform structures.The function of mooring system is to keep thebuoy, ship or platform structure at a relativelyfixed location during engineering operations.When the pipeline were first laid offshore, noextraordinary analyses or deploymenttechniques were needed, since they were inshallow water and were of small diameter. Asthe platforms were built in deeper or deeperwater with multiple well slots, large diameterpipelines of higher strength were required.During the 1960s, engineers met thischallenge with new design and with refinedmethods of analysis and deployment.Throughout the world there are at present about90,000 km of marine pipelines. Since 1986the rate of building new marine pipelines hasbeen about 1,000 km per year. Pipeline variesfrom 1 km to 100 km in length and 7 cm to 152cm in diameter. The pipelines of smallerdiameter are used to transport oil and gas fromwellhead, and those of large diameter are usedto load and unload oil from tankers moored at

18
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
offshore terminals. At present a Norwegianproject has a 1,000 km line extending from theTroll field to Belgium completed in the year1992, Kuwait has the loading line of largestdiameter 152 cm.
PURPOSEToday, the worldwide requirement of oil isincreasing rapidly and for that more offshorestructure are needed. This paper gives anoverview knowledge of offshore engineeringsuch as various types of structures, loadingson structure and its simulations.
TYPES OF OFFSHORESTRUCTUREDepending on the water depth andenvironmental conditions, the structuralarrangement and need for new ideas isrequired. Based on the geometry andbehavior, the offshore structures for oil and gasdevelopment have been divided into thefollowing categories:
1. Fixed Platforms
A) Steel template structures
B) Concrete gravity structures
2. Compliant Structures
A) Compliant tower
B) Guyed tower
C) Articulated tower
D) Tension leg platform
3. Floating structures
A) Floating production system
Fixed Platform
Steel Template Structures
The steel template type structure consists of atall vertical section made of tubular steelmembers supported by piles driven into thesea bed with a deck placed on top, providingspace for crew quarters, a drilling rig, andproduction facilities. The fixed platform iseconomically feasible for installation in waterdepths up to 500 m. These template typestructures are fixed to seabed by means oftubular piles either driven through legs of thejacket (main piles) or through skirt sleevesattached to the bottom of the jacket. Theprinciple behind the fixed platform design isto minimize the natural period of the structurebelow 4 seconds to avoid resonant behaviorwith the waves (period in the order of 4 to 25seconds).
Jack up Ring
Jack up rings are similar to drilling barges, withone difference. Once jack up ring is towed tothe drilling site, three or four ‘legs’ are lowereduntil they rest on the sea bottom. This allowsthe working platform to rest above the surfaceof the water, as opposed to a floating barrage.However, jack up rings are suitable only forshallow waters, as extending these legs downtoo deeply would be impractical. This ring typeof ring can only operate at a water depth of500 feet.
Concrete Gravity Platforms
Concrete gravity platforms are mostly used inthe areas where feasibility of pile installationis remote. These platforms are common inareas with strong seabed geologicalconditions either with rock outcrop or sandyformation. These kinds of platforms arelocated in some parts of North Sea oil fieldsand the Australian coast. The concrete gravity

19
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
platform by its name derives its horizontalstability against environmental forces bymeans of its weight. These structures arebasically concrete shells assembled in circulararray with stem columns projecting abovewater to support the deck and facilities. Themain advantage of these types of platforms istheir stability, as they are attached to sea floorand hence there is limited movement due towind and water forces. Concrete gravityplatforms have been constructed in waterdepths as much as 350 m.
COMPLIANT STRUCTURESIn addition to the developing technologies forexploration and production of oil and naturalgas, new concepts in deepwater systems andfacilities have emerged to make ultra-deepwater projects a reality. With wells beingdrilled in water depths of 3000 m, the traditionalfixed offshore platform is being replaced bystate-of-the-art deepwater productionfacilities, which are now being used in waterdepths exceeding 500 m. All of these systemsare proven technology, and in use in offshoreproduction worldwide.
Compliant Tower
Compliant Tower (CT) is much like fixedplatforms. It consists of a narrow, flexible towerand a piled foundation that can support aconventional deck for drilling and productionoperations. The flexibility of compliant towerswithstands large lateral forces by sustainingsignificant lateral defections, and is usually usedin water depths between 300 m and 600 m.
Guyed Tower
Guyed tower is an extension of complianttower with guy wires tied to the seabed by
means of anchors or piles. The guy ropesminimize the lateral displacement of theplatform topsides. This further changes thedynamic characteristics of the system.
Tension-Leg Platforms
A tension-leg platform is a vertically mooredfloating structure normally used for offshoreproduction of oil or gas, and is particularlysuited for water depths around 1,000 m to1,200 m (about 4,000 ft). The platform ispermanently moored by means of tethers ortendons grouped at each of the structure’scorners. A group of tethers is called a tensionleg. A feature of the design of the tethers isthat they have relatively high axial stiffness (lowelasticity), such that virtually all vertical motionof the platform is eliminated. This allows theplatform to have the production wellheads ondeck (connected directly to the subsea wellsby rigid risers), instead of on the seafloor. Thismakes for a cheaper well completion and givesbetter control over the production from the oilor gas reservoir. Tension Leg Platform (TLP)consists of a floating structure held in place byvertical, tensioned tendons connected to thesea floor by pile-secured templates. The largerTLPs have been successfully deployed inwater depths approaching 1,250 m. Mini-Tension Leg Platform (Mini-TLP) is a floatingmini-tension leg platform of relatively low costdeveloped for production of smaller deepwaterreserves which would be uneconomic toproduce using more conventional deepwaterproduction systems. The world’s first Mini-TLPwas installed in the Gulf of Mexico in 1998
Articulated Tower
Articulated tower is an extension of tension legplatform. The tension cables are replaced by

20
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
one single buoyant shell with sufficientbuoyancy and required restoring momentagainst lateral loads. The main part of theconfiguration is the universal joint whichconnects the shell with the foundation system.The foundation system usually consists ofgravity based concrete block or sometimeswith driven piles. The articulated tower conceptis well suited for intermediate water depthsranging from 150 m to 500 m.
FLOATING STRUCTURESFloating Production System
Floating Production System (FPS) consists ofa semi-submersible unit which is equippedwith drilling and production equipment. It is themost common type of offshore drilling rings,combining the advantages of submersiblerings with ability to drill in deep water. The ringis partially submerged, but still floats above thedrill site. When drilling, the lower hull, filled withwater, provides stability to the ring. Semi-submersible rings are generally held in placeby huge anchors with wire rope and chain, orcan be dynamically positioned using rotatingthrusters. Production from subsea wells istransported to the surface deck throughproduction risers designed to accommodateplatform motion. The FPS can be used in arange of water depths from 300 m to 1,500 m.
Floating Production, Storage andOffloading System
Floating Production, Storage and OffloadingSystem (FPSO) consists of a large tanker typevessel moored to the seafloor. An FPSO isdesigned to process and stow production fromnearby subsea wells and to periodically off-load the stored oil to a smaller shuttle tanker.The shuttle tanker then transports the oil to an
onshore facility for further processing. AnFPSO may be suited for marginally economicfields located in remote deepwater areaswhere a pipeline infrastructure does not exist.Currently, there are no FPSOs approved foruse in the Gulf of Mexico. However, there areover 70 of these systems being usedelsewhere in the world.
TYPES OF LOADSLoads on offshore structures are gravity loadsand environmental loads. Gravity loads arisefrom dead weight of structure and facilitieseither permanent or temporary. Seismic loadsarise from gravity loads and are a derived type.Environmental loads play a major role ingoverning the design of offshore structures.Before starting the design of any structure,accurate prediction of environmental loads isimportant. Various environmental loads actingon the offshore platform is listed below.
1) Gravity Loads
A) Structural Dead Loads
B) Facility Dead Loads
C) Fluid Loads
D) Live Loads
E) Drilling Loads
2) Environmental Loads
A) Wind Loads
B) Wave Loads
C) Current Loads
D) Buoyancy Loads
E) Ice Loads
F) Mud Loads
3) Seismic Loads

21
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
GRAVITY LOADSStructural Dead Loads
Dead loads include all fixed items in theplatform deck, jacket, bridge and flarestructures. It includes all primary steel structuralmembers, secondary structural items such asboat landing, pad eyes, stiffeners, handrails,deck plating, and small access platforms. Theprimary structural steel members arecalculated based on the structural informationin the model automatically when a computerprogram is used to analyze the structure. Butthe weight of the secondary structural steelitems shall be calculated applied to thestructural model at appropriate locations.
Facility Dead Loads
The structure built either for drilling or wellheadtype platform or for process type platformsupports various equipment and facilities.These are fixed type items and not structuralcomponents. They do not have any stiffnessto offer in the global integrity of the structureand shall not be modelled. The weight of suchitems shall be calculated and applied at theappropriate locations according to the plan ofthe structure. These items include
a) Mechanical equipment
b) Electrical equipment
c) Piping connecting each equipment
d) Electrical Cable trays
e) Instrumentation items
Fluid Loads
The fluid loads are weight of fluid on theplatform during operation. This may include allthe fluid in the equipment and piping. Theweight of these items shall be calculatedaccurately and applied to the correct locations.
Live Loads
Live loads are defined as movable loads andare temporary in nature. Live loads will onlybe applied on areas designated for thepurpose of storage either temporary or longterm. Further, the areas designed for lay downduring boat transfer of materials from boat shallalso be considered as live loads. Other liveloads include open areas such as walkways,access platforms, and galley areas in the livingquarters, helicopter loads in the helipad, etc.These loads shall be applied in accordancewith the requirement from the operator of theplatform.
Drilling Loads
Drilling loads are due to drill rigs placed on
the top of the platform for drilling purposes.
Normally, drilling rigs are as heavy as 500 tons
to 1000 tons. These will deliver reaction forces
on the deck and the stiffness of the drilling rigs
is not considered in the structural analysis.
Hence the weight of the structure shall be
applied as load on the structure. Further, during
drilling, additional loads are developed due to
drill string and pulling operations. These loads
are also considered in the analysis.
ENVIRONMENTAL LOADSWind Loads
The wind speed at 10 m above Lowest
Astronomical Tide (LAT) is normally provided
(Vo). This wind speed shall be extrapolated to
the height above for the calculation of wind
speed. The extrapolation shall be calculated
as follows:
1/8
0 10
yV V

22
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
where, Y is the elevation of point inconsideration in ‘m’ above LAT and V is thevelocity at that point. Wind loads shall becalculated as per API RP2A guidelines.Sustained wind speeds (10 min mean) shallbe used to compute global platform wind loadsand gusty wind (seconds) shall be used tocompute the wind loads to design individualmembers.
The wind pressure can be calculated as,
2
1w
pgF V
where F is the wind pressure per unit area, (0.01255 KN/m3) is the density of air, g is thegravitational acceleration (9.81 m/s2) and V isthe wind speed in m/s. The above equationcan be simplified by substituting the values andcan be expressed as
2 20.6 /wF V kN m
The total wind load on the platform can becalculated using the wind blockage area andthe pressure calculated as above. The shapecoefficient (Cs) shall be selected as per APIRP2A guidelines. But for the calculation ofglobal wind load (for jacket and deck globalanalysis) shape coefficient can be 1.0.
The total force on the platform can becalculated as,
x w x sf F A C y w y sf F A C
Wave and Current LoadsMethodology
In applying design waves load onto the offshorestructures, there are two ways of applying it.
- Design wave method
- Spectral Method
In design wave method, a discrete set of
design waves (maximum) and associatedperiods are selected to generate loads on thestructure. These loads are used to computethe response of the structure. In the spectralmethod, an energy spectrum of the sea-statefor the location are taken and a transferfunction for the response will be generated.These transfer function are used to computethe stress in the structural members.
Design Wave Method
The wave loads exerted on the jacket isapplied laterally on all members and itgenerates overturning moment on the structure.Period of wind generated waves in the opensea can be in the order of 2 to 20 s. Thesewaves are called gravity waves and containmost of the wave energy. Maximum wave shallbe used for the design of offshore structures.The relationship between the significant waveheight (H
s) and the maximum wave height
(Hmax
) is
max 1.86 sH H
The above equation corresponds to acomputation based on 1,000 waves in arecord. The design wave height (in Meters) forvarious regions is tabulated below.
API RP2A requires that both 1 year and 100year recurrence wave is used for the designof jacket and piles. Appropriate combinationof loads with these waves shall be used in thedesign.
Spectral Method
Instead of simulating the design waveenvironment by discrete maximum wave, a
design sea-state described by energyspectrum for the given site is used in the load
simulation.

23
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
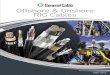
Current Profile
Ocean currents induce drag loading onoffshore structures. These currents togetherwith the action of waves generate dynamicloads. Ocean currents are classified into tidalcurrent and wind driven current. Wind drivencurrents are small in nature and they varylinearly with depth where as tidal currents varynonlinearly with depth.
The current variation with depth is shown inFigures and can be expressed as below:
1/ 7
T oT
yV V
h
where VT is the tidal current at any height from
sea bed, VoT is the tidal current at the surface,
y is the distance measure in ‘m’ from seabedand h is the water depth.
w ow
yV V
h
where VW
is the wind driven current at anyheight from sea bed, Vow is the wind drivencurrent at the surface, y is the distancemeasure in ‘m’ from seabed and h is the waterdepth.
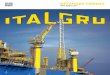
Application of wave load on structure isshown in Figure 2.
Marine Growth
Marine growth is an important part inincreasing the loads on offshore structures.The growth of marine algae increases thediameter and roughness of members which inturn cause the wave or current loading toincrease. The thickness of marine growthgenerally decreases with depth from the meansea level and it is maximum in the splash zone.The thickness of marine growth in the splashzone can be as much as 20 cm and will reducebelow to 5 cm. In deeper zones, the thicknessmay be negligible. Splash zone is a regionwhere the water levels fluctuate between lowto high. In general, the splash zone variesbetween -3 m and +5. In structural analysis,the increased diameter of the member (D = d+ tm) shall be included so that the wave andcurrent loads can be calculated correctly. Dand d are the diameter of increased memberand original member respectively and tm isthe thickness of the marine growth. Theroughness of the marine growth is an importantparameter in determining the drag and inertia
Table 1: Maximum Design Wavesin Various Regions
Region 1 year 100 year
Bay of Bengal 8 18
Gulf of Mexico 12 24
South China Sea 11 24
Arabian Sea 8 18
Gulf of Thailand 6 12
Persian Gulf 5 12
North Sea 14 22
Figure 1: Current Profile on Structure

24
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
coefficients. The made relevant API RP2Aclauses may be referred for more details.
Morison Equation
Wave and current loading can be calculatedby Morison equation.
2
!4T D w m w
DF C DV V C a
where FT is the total force, w is the density of
water, CD and C
m are the drag and inertia
coefficients respectively, D is the diameter ofthe member including marine growth, V is thevelocity and a is the acceleration.
The first term in the equation is dragcomponent (FD) and the second term is theinertia component (FI). This can be expressedas
T D IF F F
Most of the time, current exists in the samedirection of the wave propagation and hencethe current shall be taken into consideration inthe load calculation. However, algebraic sumof wave and current loads is different fromcalculation of load by adding the horizontalwater particle velocity with the current velocityand computing the loads. Current velocity shallbe added using vector with the water particlevelocity before computation of drag force, i.e.V = Vw + Vc where V is the total velocity, Vw isthe velocity due to waves and Vc is the velocityof current.
BUOYANCY LOADThe offshore structural members are mostlymade buoyant by air tight sealing of the weldsto avoid water entry. This is purposely planned,so that the overall structure has adequate
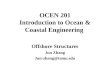
buoyancy during installation. Typical example isthe jacket structure. This kind of structure requiresat least a reserve buoyancy of 10% to 15%. Thereserve buoyancy is defined as buoyancy inexcess of its weight. To obtain this buoyancy,structural tubular members are carefully selectedsuch that their buoyancy / weight ratio is greaterthan 1.0. This means that the member will floaton water. On other hand, if the member is part ofa structure supported at its two ends and forcedto be submerged by weight of other members,this member will experience an upward forceequal to the displaced volume of water. This iscalled buoyancy force. The buoyancy force canbe calculated by two methods as shown inFigure 3.
• Marine Method
• Rational Method
Marine Method
The marine method assumes that the memberconsidered having rigid body motion. Thismeans that the weight of the member iscalculated using submerged density of steeland applied to the member vertically down asa uniformly distributed load.
Rational MethodThe rational method takes in to account thepressure distribution on the structure; resultsin a system of loads consisting of distributedloads along the members and concentratedloads at the joints. The loads on the membersare perpendicular to the member axis and inthe vertical plane containing the member.
Ice LoadsFor structures located in Polar regions and coldcountries, ice loading shall be considered inthe design. In these regions, the ice sheets of

25
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
varying thickness can move from one locationto other due to tide and under water current.These ice sheets when come closer and hitthe offshore structures, a large impact force isexperienced by the structure.
This kind of force cannot be calculated bymeans of analytical tools; an empiricalequation is available and can be used toestimate the force (F
ice)
iceF CfA
where,
fice
= Crushing strength of ice vary between 1.5MPa and 3.5 MPa
Cice
= Ice force coefficient varies between 0.3to 0.7
A = Area struck by ice (Diameter of member xice sheet thickness)
Mud Loads
Platforms located in the vicinity of the rivermouth (shallow water platforms) mayexperience the mud flow loads. The river flow
brings sediment transport and nearby mudtowards the platform and may slide through thelocation. Sometimes over a long period of timesediment settlement at the location of theplatform may have sloping surface and mudslides can also generate mud loads.
These loads can be calculated using
mud mudF C D
where,
Cmud
= Force Coefficient that varies betweenfrom 7 and 9
= Shear strength of soil 5 kpa to 10 kpa
D = Diameter of pile or member
LOAD SIMULATIONDead LoadsThe dead loads of primary structural memberssuch as deck beams, braces, jacket legs andbraces, piles etc shall be calculated by theprogram automatically based on theirdimensions and unit weight of the materialsupplied.
Figure 2: Wave Loadingon Jacket Structure
Figure 3: Buoyancy Calculation Methods

26
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
Equipment Loads
Generally, the equipment weight is manuallyentered based on VENDOR suppl iedinformation. The weight of the equipment shallbe distributed to the deck beams or platingdepending on the load transfer methodadopted for the design of the equipment skid.
Fluid Loads
The fluid loads are based on equipmentoperating weight. This can also be obtainedfrom the equipment manufacturer. The contentsof the equipment can be calculated as below:
Wfluid
= WOper
– Wdry
where,
Woper
and Wdry
are the weight of equipment inoperating and dry conditions, respectively.
Drilling Loads
Drilling equipment include rig, drill strings, mudtanks, etc. These equipments are also similarto the other equipment described above exceptthat the drilling rig is not fixed equipment.Normally, these shall be applied as point loadson the skid beams. There may be several loadcases to cover all the well positions.
Live Loads
The live loads shall be applied on open areasnot occupied by equipment or facilities. Thiscan be applied as member loads.
Wind, Wave and Current
Wind
Wind loads are normally calculated manuallyand applied to deck edge usually on nodes atthe periphery. Diagonal or non-orthogonal windload cases can be generated from loads fromorthogonal cases.
Wave and Current
The wave and current shall be simulated usingsoftware contained modules. Manualcalculation and application of these loads willlead to large errors and approximations sincethe number of members are very high.
CONCLUSION1. Each platform/ ring type is chosen mainly
due to water depth considerably and dueto the deck equipment necessary toperform its service.
2. Selection of offshore structures based onwater depths
A) The jack up ring - 90 m to 150 m
B) The fixed platforms - up to about600 m
C) Semi-submersible platforms - up to1000 m
D) The tension leg platforms - greater than300 m to 1200 m.
E) The spar platform - more than 1800 m.
3. Forces on these structures due to the oceanand atmosphere include ocean waves andcurrents, wind, buoyancy and friction at thebase.
4. Various loading parameters are describedhere, which are key factors that mustconsider in the analysis and design ofoffshore structures.
5. The present of marine growth, hassignificant effects on the hydrodynamicloading of offshore structures and should betaken into consideration in the design andanalysis of structures.

27
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
6. Compliant structures have found primaryoffshore application in the oil industry.
7. Whole structural platform is analyzed byvarious ways such as dynamic analysis,impact analysis, seismic analysis, fatigueanalysis and push over analysis.
8. Corrosion in offshore structure is the maininfluencing factor in reducing the strengthof the structure; this can be treated properlyfor good stability.
9. New software developed for analysis ofoffshore structure predicts structuralbehavior in all possible manners and itreduces human stress.
REFERENCES1. Adrezin R and Benaroya H (1996),
“Dynamic response of Compliantoffshore structures – Review”, Journal ofAerospace Engineering/, October.
2. Ahmed A Elshafey and Mahmoud RHaddara (2009), “Dynamic Response ofOffshore Jacket Structure Under RandomLoads”, University of Newfoundland, St.John’s, NL, Canada A1B 3X5, MarineStructures 22, pp. 504-512.
3. American Petroleum Institute [API],(1996), (RP-2A 20th Edition, andSupplement 1.
4. API (American Petroleum Institute)(1991), Recommended Practice forPlanning, Designing and ConstructionFixed Offshore Platforms, APIRecommended Practice 2A (RP 2A),19th Edition, Washington.
5. API (1984), Recommended Practice forPlanning, Designing and ConstructingFixed Offshore Platforms, American
Petroleum Institute, API RP2A, and 15th
Edition.
6. Barltrop N D P and Adamd A J (1991),“Dynamics of Fixed Marine Structures”,Third Edition, Butterworth-Heinemann Ltdand Marine Technology Directorate Ltd,London.
7. Bea R G, Fellow, ASCE, Xu T, Stear J,and Aamos R (1999), “Wave Forces onDecks of Offshore Platforms”, Journal ofWaterway, Port, Costal, and OceanEngineering, Vol. 125, No-3, May/June,1999.
8. Chakrabarti S K (1994), “Hydrodynamicsof Offshore Structures”, Southampton:Computational Mechanics Publications.
9. Esper P, Duan X and Willford M (2000),“Numerical Modelling in the SeismicDesign of Oil and Gas Platforms”, 1st
International Symposium on EarthquakeEngineering, Riyadh, Saudi Arabia,
10. Faltinsen O (1994), “Wave and CurrentInduced Motions of Floating ProductionSystem”, Journal of Applied OceanResearch, Vol. 15, pp. 351-370.
11. Gudmestad O T and Moe G (1996),“Hydrodynamic Coefficients forcalculation of hydrodynamic loads onoffshore structures”, Marine Structures,pp. 745-58.
12. Hallam M G, Heaf N J and Wooton L R(1977), “Dynamics of Marine Structures:Methods of Calculating the DynamicResponse of Fixed Structures Subjectedto Wave and Current Action”, Report UR8.Construction Industry Research andInformation Association Underwater

28
Int. J. Struct. & Civil Engg. Res. 2014 A S Kharade and S V Kapadiya, 2014
Engineering Group, London, 1977.
13. Haritos N (2007), “Analysis and Designof Offshore Structures – an Overview”,Proc. 10th Aust. Conf. on Mechanics ofStrut. & Materials, Adelaide, pp. 253-258.
14. Hermundstad O A, Aarsnes J V and MoanT (1997), “Hydro elastic analysis of a highspeed catamaran in regular and irregularwaves”, FAST ’97, Sydney, pp. 447-454.
15. Le Mehaute B (1969), “An introduction tohydrodynamics and water waves”, WaterWave Theories, Vol. II, TR ERL 118-POL-3-2, US, Department of Commerce, andESSA Washington, DC.
16. Mendes A C, Kolodziei J A and CorreiaH J D (2003), “Numerical Modeling ofwave-current loading on offshorestructures”, In- International Conference
on fluid structure interaction, Vol. II, pp.85-86 Cadiz Spain.
17. Sadeghi K (1989), “Design and Analysisof Marine Structures”, Khajeh NasirroddinToosi University of Technology, Tehran,Iran.
18. Stavrous A Anagnostopoulos (1982),“Dynamic Response of OffshorePlatforms to Extreme Waves”, Institute ofEngineering Seismology and EarthquakeEngineering, Thessalonica, Greece,Engineering Structure, Vol. 4, July.
19. Thomas H Dawson (1983), “OffshoreStructural Engineering”, EnglewoodCliffs, NJ: Prentice-Hall, pp. 346-352.
20. Wilson James F (James Franklin) (1933),“Dynamics of offshore structures / JamesF Wilson, Bruce J Muga, Lymon CReese—2nd Edition.