Upload
boba001
View
73
Download
2
Embed Size (px)
DESCRIPTION
skripta iz modeliranja i simuliranja sustava
Citation preview
TEHNIKO VELEUILITE ZAGREBPOLYTECHNICUM ZAGRABIENSE
UNIVERSITY OF APPLIED SCIENCES ZAGREB
Strojarski odjel
Preddiplomski struni studij mehatronike
MODELIRANJE I SIMULIRANJE SUSTAVA
Radni materijali
Dr. sc. Toni Bjai, v. pred.
Zagreb, 2015.
Sadrzaj
0 Uvod u modeliranje i simuliranje sustava 10
1 Modeliranje pasivnih elektricnih sustava koristenjem temeljnih fizikalnih zakona 111.1. Serijski RLC krug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1.1. Priprema za simulaciju . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.1.2. Provedba simulacije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2. Elektronicki energetski pretvaraci . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.2.1. Uzlazni istosmjerni pretvarac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3. PEM gorivne celije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.3.1. Princip rada i osnovne elektrokemijske reakcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.4. Zadaci za samostalni rad studenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2 Prikaz sustava u prostoru stanja 282.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.1.1. Prikaz serijskog RLC kruga u prostoru stanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.1.2. Simulacija serijskog RLC kruga pomocu varijabli stanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.1.3. Prikaz uzlaznog pretvaraca u prostoru stanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.1.4. Prikaz gorivne celije u prostoru stanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.1.5. Zadaci za samostalni rad studenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.2. Kanonske realizacije sustava u prostoru stanja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.2.1. Upravljiva kanonska realizacija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402.2.2. Osmotriva kanonska realizacija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.2.3. Dijagonalna (modalna) kanonska realizacija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
SADRZAJ 2
3 Modeliranje mehanickih procesa s gibanjem krutih tijela 513.1. Modeliranje mehanickih procesa s linearnim gibanjem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.1.1. Simuliranje i analiza sustava amortizacije automobila . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.1.2. Zadaci za samostalni rad studenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.2. Modeliranje mehanickih procesa s rotacijskim gibanjem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.2.1. Rotacijski sustav s tarnim prijenosom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613.2.2. Rotacijski sustav s remenim prijenosom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.2.3. Nelinearni elementi u rotacijskim sustavima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.2.4. Zadaci za samostalni rad studenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4 Modeliranje procesa zasnovanih na mehanici fluida 754.1. Proces istjecanja fluida kroz dva spregnuta spremnika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.1.1. Linearizacija procesa u radnoj tocki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784.1.2. Linearizacija procesa koristenjem Matlaba . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.2. Toplinski proces s mijesanjem i istjecanjem fluida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5 Modeliranje aktivnih elektronickih sustava s operacijskim pojacalima 975.1. Pojednostavljeni model operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 985.2. Model idealnog operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995.3. Analiza elektronickih mreza s idealnim operacijskim pojacalima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.4. Zadaci za samostalni rad studenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1045.5. Modeliranje realnih karakteristika operacijskih pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.5.1. Konacno pojacanje operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1105.5.2. Ulazni napon pomaka operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135.5.3. Ulazna struja pomaka operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135.5.4. Ogranicenja ulaza i izlaza operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1185.5.5. Granicna frekvencija operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1185.5.6. Maksimalna brzina promjene izlaznog signala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1215.5.7. Sum operacijskog pojacala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1225.5.8. Zadaci za samostalni rad studenta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
6 Modeliranje digitalnih sustava upravljanja 1256.1. Modeliranje digitalnog racunala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1266.2. Z-transformacija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
SADRZAJ 3
6.3. Diskretne prijenosne funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Popis slika
1.1 Pasivni elektricni serijski RLC krug. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2 Bodeov dijagram prijenosne funkcije serijskog RLC kruga (1-13). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3 Nacelna shema uzlaznog istosmjernog pretvaraca. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.4 Elektricna shema istosmjernog uzlaznog pretvaraca s ukljucenom tranzistorskom sklopkom T1. . . . . . . . . . . . . . . . . . . . . . 201.5 Elektricna shema istosmjernog uzlaznog pretvaraca s iskljucenom tranzistorskom sklopkom T1. . . . . . . . . . . . . . . . . . . . . 201.6 Princip rada gorivne celije. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.7 Nadomjesna elektricna shema dinamickog modela gorivne celije. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.8 Elektricna shema sustava uz zadatak 1.14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.9 Elektricna shema sustava uz zadatak 1.15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.10 Elektricna shema sustava uz zadatak 1.16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.11 Elektricna shema sustava uz zadatak 1.17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.12 Elektricna shema sustava uz zadatak 1.18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.13 Elektricna shema sustava uz zadatak 1.19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.14 Elektricna shema sustava uz zadatak 1.20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261.15 Elektricna shema sustava uz zadatak 1.21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.1 Simulacijska shema serijskog RLC kruga u prostoru stanja. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.2 Implementacija jednadzbe stanja (2-1) i izlazne jednadzbe (2-2) u Simulinku. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.3 Simulacijska shema za Simulink kao rjesenje zadatka 2.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.4 Simulacijska shema za Simulink kao rjesenje zadatka 2.10, s podsustavima sklopne logike i energetskog dijela uzlaznog pretvaraca. . 362.5 Podsustav sklopne logike pretvaraca za shemu prikazanu slikom 2.4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.6 Podsustav energetskog dijela pretvaraca za shemu prikazanu slikom 2.4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.7 Upravljiva kanonska realizacija sustava u prostoru stanja. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
POPIS SLIKA 5
2.8 Osmotriva kanonska realizacija sustava u prostoru stanja. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.9 Dijagonalna (modalna) kanonska realizacija sustava u prostoru stanja. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.10 Gotovo dijagonalna kanonska realizacija sustava (2-56) u prostoru stanja. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.11 Simulacijska shema upravljive kanonske realizacije iz zadatka 2.21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.12 Simulacijska shema osmotrive kanonske realizacije iz zadatka 2.21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.13 Simulacijska shema dijagonalne kanonske realizacije iz zadatka 2.21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492.14 Simulacijska shema balansirane dijagonalne kanonske realizacije iz zadatka 2.21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.1 Pojednostavljeni prikaz sustava amortizacije za jedan kotac automobila. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523.3 Odzivi sustava amortizacije automobila za parametre prikazane u tablici 3.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.2 Simulacijska shema sustava amortizacije automobila. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563.4 Mehanicki proces s linearnim gibanjem primjer 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.5 Mehanicki proces s linearnim gibanjem primjer 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.6 Mehanicki proces s linearnim gibanjem primjer 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.7 Mehanicki proces s linearnim gibanjem primjer 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.8 Mehanicki proces s linearnim gibanjem primjer 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583.9 Mehanicki proces s linearnim gibanjem primjer 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593.10 Mehanicki proces s linearnim gibanjem primjer 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.11 Rotacijski sustav s tarnim prijenosom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613.12 Simulacijska shema rotacijskog sustava s tarnim prijenosom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.13 Mehanicki proces s rotacijskim gibanjem i idealnim prijenosom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.14 Rotacijski sustav s remenim prijenosom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.15 Simulacijska shema rotacijskog sustava s remenim prijenosom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683.16 Rotacijski sustav s nelinearnim elementom primjer 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.17 Linearizacija nelinearne funkcije u okolini radne tocke. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.18 Rotacijski sustav s krutom zupcastom letvom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.19 Rotacijski sustav s idealnim prijenosom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.20 Rotacijski sustav s idealnim prijenosom. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.1 Shematski prikaz procesa istjecanja nestlacivih fluida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.2 Simulacijska shema procesa istjecanja fluida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784.3 Simulacijska shema s blokovima In i Out i podsustavom Nelinearni model, za odredivanje lineariziranog modela funkcijom linmod. 834.4 Podsustav Nelinearni model simulacijske sheme sa slike 4.3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.5 Simulacijska shema za snimanje odziva nelinearnog i linearnog modela sustava. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
POPIS SLIKA 6
4.6 Usporedba odziva nelinearnog i linearnog modela sustava (zadatak 4.6). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.7 Shematski prikaz procesa mijesanja dvaju nestlacivih fluida istih fizikalnih svojstava i razlicitih temperatura. . . . . . . . . . . . . . . 884.8 Presjek spremnika s dimenzijama za odredivanje veze izmedu visine i volumena spremnika. . . . . . . . . . . . . . . . . . . . . . . 894.9 Simulacijska shema toplinskog procesa s podsustavom Toplinski proces. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 924.10 Simulacijska shema podsustava Toplinski proces sa slike 4.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 934.11 Odzivi sustava na zadanu promjenu ulaznih velicina. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 944.12 Simulacijska shema za odredivanje linearnog modela toplinskog procesa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 944.13 Simulacijska shema za usporedbu odziva linearnog i nelinearnog modela toplinskog procesa. . . . . . . . . . . . . . . . . . . . . . . 954.14 Usporedba odziva linearnog i nelinearnog modela toplinskog procesa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.1 Simbol operacijskog pojacala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.2 Elektronicka shema operacijskog pojacala A741. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 985.3 Pojednostavljeni model operacijskog pojacala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995.4 Model idealnog operacijskog pojacala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.5 Operacijsko pojacalo s negativnom povratnom vezom u invertirajucem spoju invertirajuce pojacalo. . . . . . . . . . . . . . . . . . 1005.6 Operacijsko pojacalo s negativnom povratnom vezom u neinvertirajucem spoju neinvertirajuce pojacalo. . . . . . . . . . . . . . . . 1015.7 Naponsko sljedilo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015.8 Diferencijsko pojacalo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1025.9 Tezinsko zbrajalo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1045.10 Integrator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.11 Idealni derivator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1055.12 PT1 element. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1065.13 DT1 element. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1065.14 PDT1 element s faznim prethodenjem (engl. phase lead). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1065.15 PI regulator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075.16 PDT1 element s faznim kasnjenjem (engl. phase lag). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075.17 PIT1 element. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1085.18 Idealni PID regulator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1085.19 Serijska realizacija PID regulatora (PIPDT1 element). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1085.20 PT2 element. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1095.21 SallenKey topologija niskopropusnog filtra (PT2 element). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1095.22 SallenKey topologija visokopropusnog filtra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1105.23 SallenKey topologija pojasno-propusnog filtra. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
POPIS SLIKA 7
5.24 Model operacijskog pojacala s ulaznim naponom pomaka. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135.25 Model operacijskog pojacala s ulaznim strujama. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1145.26 Shema uz zadatak 5.18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1155.27 Rjesenje zadatka 5.18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1165.28 Shema uz zadatak 5.19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1165.29 Rjesenje zadatka 5.19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1175.30 Bodeov dijagram otvorenog i zatvorenog kruga, uz zadatak 5.21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1215.31 Model otpornickog termickog suma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1245.32 Ovisnost spektralne gustoce termickog suma o iznosu otpora za razlicite temperature. . . . . . . . . . . . . . . . . . . . . . . . . . . 1245.33 Model suma operacijskog pojacala. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
6.1 Tipican smjestaj digitalnog racunala unutar regulacijskog sustava. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1266.2 Postupak pretvorbe analognog signala u digitalni uz Td = 1 s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276.3 Blokovska shema postupka uzorkovanja i zadrzavanja nultog reda. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276.4 Blokovski prikaz sustava: a) kontinuirani, b) uzorkovani ulaz i c) uzorkovani ulaz i izlaz. . . . . . . . . . . . . . . . . . . . . . . . . 130
Popis tablica
3.1 Konstante sustava amortizacije automobila. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5.1 Parametri operacijskog pojacala uz zadatak 5.20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1195.2 Odnos standardne devijacije i vjerojatnosti mjerenja vrsne vrijednosti (peak-to-peak). . . . . . . . . . . . . . . . . . . . . . . . . . 122
6.2 Teoremi diskretne Laplaceove (Z) transformacije. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1286.1 Tablica vaznih Laplaceovih (L) i diskretnih Laplaceovih (Z) transformacija. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Popis videozapisa
1.1 Unos simulacijske sheme serijskog RLC kruga ipodesavanje osnovnih postavki (13:03). . . . . . . . . . 17
1.2 Postupak konfiguracije bloka prijenosne funkcije seri-jskog RLC kruga (3:38). . . . . . . . . . . . . . . . . . 17
1.3 Postupak pokretanja simulacije i snimanja odziva seri-jskog RLC kruga (5:07). . . . . . . . . . . . . . . . . . 17
1.4 Utjecaj promjene iznosa otpora R na odzive serijskogRLC kruga (6:25). . . . . . . . . . . . . . . . . . . . . . 17
1.5 Konfiguracija bloka Step za dvije skokovite promjeneulaznog napona (1-20) serijskog RLC kruga (9:08). . . . 18
1.6 Konfiguracija dva bloka Step za tri skokovite promjeneulaznog napona (1-21) serijskog RLC kruga (4:39). . . . 18
1.7 Konfiguracija pocetnih uvjeta na integratorima u simu-lacijskoj shemi RLC kruga (6:49). . . . . . . . . . . . . 18
1.8 Odzivi serijskog RLC kruga na harmonijsku promjenuulaznog napona (1-10) (8:55). . . . . . . . . . . . . . . 18
Poglavlje 0
Uvod u modeliranje i simuliranje sustava
Projektiranje zatvorenog sustava automatskog upravljanja obuhvacaanalizu stabilnosti, analizu kvalitete prijelazne pojave, analizu osjetljivo-sti, sintezu i optimiranje sustava (za vise detalja procitajte poglavlja 3.1do 3.3 knjige [1]).
Navedena istrazivanja mogu se obaviti na realnom sustavu ili na mo-delu realnog sustava. Postupak projektiranja sustava automatskog upra-vljanja moze se u vecini slucajeva znatno ubrzati ako se istrazivanjaprovedu na modelu realnog sustava.
Prema nacinu stvaranja analogija modeli se mogu podijeliti namatematicke i fizicke modele sustava [1].
Fizicki modeli imaju jednak fizicki sustav kao i stvarni sustav (raketa,zrakoplov, brod i sl.). Trebaju imati najpovoljniji odnos dimenzija i osta-lih parametara u odnosu na stvarni objekt, te se podvrgavaju istim uvje-tima i radnim rezimima kao i stvarni objekt [1].
Matematicki modeli zasnivaju se na fizikalnim zakonitostima kojimaje moguce opisati stvarni sustav. Pri tome matematicki modeli nisu vjernaslika stvarnog sustava, jer se pri matematickom opisu zanemaruju manjevazna svojstva i parametri sustava. Matematicki model opisuje bitna svo-jstva koja utjecu na ponasanje sustava.
Posebna vrsta modela su tzv. emulatori, tj. fizicki modeli zasnovanina analognim sklopovima s operacijskim pojacalima ili digitalnim mikro-racunalima, u koje je (uz odredena ogranicenja) moguce ugraditi bilo
kakvu diferencijalnu jednadzbu ili jednadzbu diferencija. Takav emulatoristodobno moze oponasati razlicite sustave (ekvivalencija matematickihmodela) i povezati se sa senzorima, aktuatorima i ostalim elementima su-stava automatskog upravljanja.
Prema razini slozenosti modeli se mogu podijeliti na dinamicke (ve-like, male i srednje slozenosti) i staticke modele [2].
Prema nacinu modeliranja s obzirom na vrstu procesa modeli se di-jele na deterministicke i stohasticke, odnosno kontinuirane, diskretnei hibridne modele [2].
Prema nacinu matematickog opisa modeli se dijele na kontinuirane idiskretne [2].
Osnovni principi izrade matematickog modela zasnovani su na je-dnadzbama ravnoteze (energije, mase, momenta). Ove ce jednadzbe bitiopisane za pojedine vrste sustava u narednim poglavljima.
Poglavlje 1
Modeliranje pasivnih elektricnih sustava koristenjem temeljnihfizikalnih zakona
Matematicki modeli elektricnih krugova zasnivaju se na Ohmovom iKirchhoffovim zakonima. Ohmov zakon za otpornik otpora R, konde-nzator kapaciteta C i zavojnicu induktiviteta L, kao temeljne pasivne ele-mente elektricnog kruga, uspostavlja vezu izmedu napona u(t) i struje i(t)na elementu:
u(t) = Ri(t) ili i(t) =u(t)R
ili R =u(t)i(t)
, (1-1)
i(t) = Cd u(t)
d tili u(t) =
1C
i(t) d t, (1-2)
u(t) = Ld i(t)d t
ili i(t) =1L
u(t) d t. (1-3)
Pri tome je struja jednaka promjeni naboja u jedinici vremena:
i(t) =d q(t)
d t. (1-4)
Kirchhoffov zakon za struje ili zakon ocuvanja kolicine elektricnognaboja kaze da je zbroj svih struja koje ulaze u neki cvor jednak zbrojusvih struja koje izlaze iz tog cvora.
Kirchhoffov zakon za napone zasnovan je na ocuvanju energije, pricemu je napon definiran kao energija po jedinici naboja. Ukupna kolicinaenergije dobivena po jedinici naboja mora biti jednaka kolicini energijeizgubljene po jedinici naboja, jer su i energija i naboj ocuvani. Poje-dnostavljeno se moze reci da je zbroj elektromotornih sila (napona) svihnaponskih izvora u zatvorenoj petlji jednak zbroju padova napona na pa-sivnim elementima u zatvorenoj petlji.
Konkretni primjeri bit ce dani u narednim sekcijama.
1.1. Serijski RLC krug
Pasivni elektricni serijski RLC krug prikazan je na slici 1.1.Prema shemi sa slike 1.1 moze se napisati jednadzba Kirchhhoffovog
zakona za napone:
Ri(t) + Ld i(t)d t
+ uC(t) = u(t). (1-5)
Jednadzba Ohmovog zakona za idealni kondenzator, koja u ovomslucaju veze struju i(t) koja tece kondenzatorom kapaciteta C i napon na
1.1. Serijski RLC krug 12
+
u (t)
i(t) R L
C uC (t)
Slika 1.1. Pasivni elektricni serijski RLC krug.
kondenzatoru uC(t), glasi:
i(t) = Cd uC(t)
d t. (1-6)
Uvrstavanjem izraza za struju (1-6) u izraz (1-5), dobije se:
LCd2 uC(t)
d t2+ RC
d uC(t)d t
+ uC(t) = u(t). (1-7)
Diferencijalna jednadzba (1-7) pogodna je za simulaciju u Simulinku.No prije nego se krene na rad sa Simulinkom, dobro je najprije na papirunacrtati simulacijsku shemu i napraviti izracune kojima se mogu predvi-djeti rezultati simulacija.
1.1.1. Priprema za simulaciju
Prije nego pogledate rjesenja svakog zadatka, pokusajte ih samostalnorijesiti koristenjem samo pribora za pisanje i crtanje te kalkulatora, kao
da ste na ispitu bez racunala.
Zadatak 1.1Odredite simulacijsku shemu elektricnog sustava opisanog jedna-
dzbom (1-7) za programski jezik Matlab Simulink, tako da se moguregistrirati napon na kondenzatoru uC(t) i struja i(t). Za struju se ne pisenova diferencijalna jednadzba, nego se do struje dolazi uz pomoc izraza(1-6).
Ulazni napon mijenja se skokovito prema sljedecoj funkciji:
u(t) = 10 S(t) V. (1-8)
Zadani iznosi otpora, induktiviteta i kapaciteta su:
R = 25 , L = 20 mH, C = 50 F. (1-9)
Zadatak 1.2Za zadane iznose parametara izracunajte prijenosnu funkciju G(s) =
UC(s)U(s) te skicirajte odziv na promjenu ulaznog napona (1-8). Na temelju
skice odziva odredite potrebno vrijeme simulacije Tsim, tako da je prije-lazna pojava dobro uocljiva te da se vidi iznos stacionarnog stanja.
Zadatak 1.3Koristeci znanja stecena na predmetu Osnove elektrotehnike,
izracunajte iznos amplitude i faznog pomaka napona kondenzatorauC i struje i u stacionarnom stanju, na promjenu ulaznog napona:
u(t) = 5 sin (2000t) . (1-10)
Na predmetu Upravljanje i regulacija paralelno cete uciti i frekvenci-jske karakteristike, poglavito Bodeove dijagrame. Nakon sto usvojite
1.1. Serijski RLC krug 13
to gradivo, vratite se na ovaj zadatak i verificirajte rjesenje koristenjemBodeovog dijagrama.
Rjesenje 1.1Diferencijalnu jednadzbu (1-7) preurediti tako da je izrazena najvisa
derivacija:
d2 uC(t)d t2
=1
LC
[u(t) RC d uC(t)
d t uC(t)
]. (1-11)
Zatim se pomocu dva vezana integratora od clana s najvisom derivacijomd2 uC(t)
d t2 dolazi do nizih derivacijad uC(t)
d t i konacno rjesenja diferencijalnejednadzbe uC(t). Detaljni koraci dani su u rjesenju provedbenog dijelasimulacije u videozapisu 1.1.
Rjesenje 1.2Prijenosna funkcija se iz diferencijalne jednadzbe (1-7) dobiva primje-
nom Laplaceove transformacije, uz pocetne uvjete jednake nuli:
G(s) =UC(s)U(s)
=1
1 + RCs + LCs2. (1-12)
Za pocetak je iz prijenosne funkcije (1-12) vidljivo da pojacanje iznosi1, sto znaci da ce se za promjenu ulaznog napona iznosa 10 V (1-8) iizlaz promijeniti za 10 V, nakon sto stacionarno stanje bude dosegnuto.Matematicki se ovo moze pokazati upotrebom teorema o konacnoj vrije-dnosti (9. poglavlje knjige [1]).
Za informaciju o prijelaznoj pojavi potrebno je prijenosnu funkciju(1-12) svesti na opci oblik prijenosne funkcije 2. reda (4. poglavlje knjige[1]):
G(s) =UC(s)U(s)
=1
1 + 2T s + T 2s2. (1-13)
Usporedbom koeficijenata nazivnika (1-12) i (1-13), te uvrstavanjem
iznosa R, L i C (1-9), dolazi se do parametara i T :
T 2 = LC T = LC = 0,001 s,2T = RC = RC
2T= 0,625.
(1-14)
Buduci da je relativni koeficijent prigusenja 0 < < 1, odziv ce bitioscilatoran i imati nadvisenje. Nadvisenje m i vrijeme maksimuma tm seracunaju prema izrazima [1]:
m = 100 epi12 = 8,084%, tm =
piT1 2
= 0,004 s. (1-15)
Buduci da je dobiveni iznos vremena prvog maksimuma jednak tm = 4ms, a odziv je samo blago oscilatoran s nadvisenjem m = 8,084%, vri-jeme simulacije je dovoljno postaviti na iznos od Tsim = 5tm = 20 ms,tako da se lijepo vidi i prijelazna pojava i stacionarno (ustaljeno) stanje.
Rjesenje 1.3Fazor ulaznog napona (1-10) iznosi:
U =52
e j0. (1-16)
Ukupna impedancija serijskog RLC spoja iznosi:
Z = R + jXL jXC = R + j (XL XC) = R + j(L 1
C
)Z = 25 + j
(2000 20 103 1
2000 50 106)
Z = 25 + j30 = 39,0512e j50,1944.
(1-17)
Iz dobivenog iznosa vidljiv je induktivni karakter impedancije na frekve-nciji 2000 rad/s.
1.1. Serijski RLC krug 14
Struja u strujnom krugu onda iznosi:
I =UZ
=
52e j0
39,0512e j50,1944=
0,1282
e j50,1944
= 0,0905e j50,1944. (1-18)
Struja u stacionarnom stanju ima amplitudu 0,128 A te kasni za ulaznimnaponom za 50,1944. Prevedeno u vremensko mjerilo, struja kasni zaulaznim naponom za 2pi2000 50,1944
360 = 0,44 ms.
Konacno, fazor napona na kondenzatoru iznosi:
UC = I ZC = 0,1282
e j50,1944 1
2000 50 106 e j90
UC =1,2804
2e j140,1944
= 0,9054e j140,1944
.
(1-19)
Napon na kondenzatoru u stacionarnom stanju ima amplitudu 1,2804 V tekasni za ulaznim naponom za 140,1944, odnosno 2pi2000 140,1944
360 = 1,2 ms.
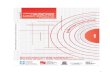
Bodeov dijagram prijenosne funkcije serijskog RLC kruga (1-13)prikazan je na slici 1.2. Plave linije na slici 1.2 predstavljaju aproksi-maciju pravcima, a crvene su tocne krivulje. Iz Bodeovog dijagrama(aproksimacije s pravcima) PT2 elementa s konjugirano-kompleksnim ko-rjenima (1-13) iscitava se lomna frekvencija l = 1T = 1000 rad/s. Nakonlomne frekvencije nagib amplitudne karakteristike iznosi 2, tj. 40 dBdekadi ili 12 dB po oktavi. Na niskim frekvencijama amplitudna ka-rakteristika iznosi 20 log 1 = 0 dB, pa je na frekvenciji ulaznog signala2000 rad/s, odnosno tocno oktavu nize, iznos amplitudne karakteristike12 dB, sto predstavlja gusenje signala od 4 puta. Dakle, ulazna ampli-tuda iznosa 5 V po ovom pribliznom proracunu je na izlazu prigusena 4puta te bi iznosila 1,25 V. Pogreska u odnosu na tocan izracun je jakomala.
Sto se tice kasnjenja, fazna karakteristika na lomnoj frekvenciji iznosi90. Nagib fazne karakteristike dvije dekade oko lomne frekvencijeiznosi 2, odnosno 90 po dekadi ili priblizno 27 po oktavi. Stogaje kasnjenje po aproksimacijskom postupku 117, sto ipak predstavljaznacajniju pogresku.
1.1.2. Provedba simulacije
Zadatak 1.4
Unijeti shemu sustava u Simulink, zajedno s parametrima (1-9) teodredenim vremenom simulacije Tsim (polje Stop time). Postavite vrije-dnost polja Max step size tako da se tokom simulacije generira barem10.000 tocaka, sto ce osigurati glatki odziv.
Zadatak 1.5
Shemi iz prethodnog zadatka dodajte i blok prijenosne funkcije(Transfer Fcn). Upisite parametre prijenosne funkcije iz pripremnogdijela vjezbe, ulaz spojite na isti izvor signala, a izlaz bloka preko multi-pleksora (Mux) prikazite na istom osciloskopu kao i odziv napona konde-nzatora uC iz prethodnog zadatka. Na drugi osciloskop dovedite signalstruje i.
Zadatak 1.6
Snimite odzive elektricnog sustava na promjenu ulaznog napona (1-8),uz zadane vrijednosti parametara sustava (1-9). Ako je sve u redu sashemom i parametrima, odzivi napona kondenzatora uC bi se morali pok-lapati. Usporedite dobivene rezultate s pripremnim dijelom vjezbe.
Zadatak 1.7
Za elektricni sustav s iznosima parametara (1-9) izvesti dodatne dvijesimulacije uz dvostruko manji i dvostruko veci iznos otpora R. Kakopromjena otpora utjece na odzive elektricnog sustava?
Zadatak 1.8
Uz originalni iznos otpora R, snimite odzive na promjenu ulaznog
1.1. Serijski RLC krug 15
101 102 103 104 10580
60
40
20
0L(
)[dB]
[rad/s]
101 102 103 104 105180
135
90
45
0
()[]
[rad/s]
Slika 1.2. Bodeov dijagram prijenosne funkcije serijskog RLC kruga (1-13).
1.1. Serijski RLC krug 16
napona:u(t) = 10 S(t) 5 S(t Tsim) V, (1-20)
uz koristenje jednog bloka Step i dvostruko vrijeme trajanja simulacije2Tsim. Primijetite da se promjena ulaznog napona (1-8) moze realizirati iblokom izvora konstantne vrijednosti Constant, ako simulacija krece odtrenutka t = 0.
Zadatak 1.9Uz originalni iznos otpora R, snimite odzive na promjenu ulaznog
napona:
u(t) = 10 S(t) 5 S(t Tsim) 5 S(t 2Tsim) V, (1-21)
uz koristenje dva bloka Step i trostruko vrijeme trajanja simulacije 3Tsim.
Zadatak 1.10Snimite odzive nepobudenog RLC kruga (u(t) = 0) uz pocetni napon
na kondenzatoru uC(0) = 5 V. Kako bi namjestili pocetni iznos struje i(0)?
Zadatak 1.11Snimite odzive elektricnog sustava na promjenu ulaznog napona
(1-10), uz zadane vrijednosti parametara (1-9). Usporedite dobivene re-zultate s pripremnim dijelom vjezbe.
Rjesenje 1.4Postupak unosa simulacijske sheme serijskog RLC kruga u Simulink i
podesavanje osnovnih postavki prikazano je u videozapisu 1.1 (13:03).
Rjesenje 1.5Postupak konfiguracije bloka prijenosne funkcije prikazan je u
videozapisu 1.2 (3:38).
Rjesenje 1.6
Postupak pokretanja simulacije i snimanja odziva prikazan je uvideozapisu 1.3 (5:07).
Rjesenje 1.7
Utjecaj promjene iznosa otpora R na odzive serijskog RLC krugaprikazan je u videozapisu 1.4 (6:25).
Rjesenje 1.8
Konfiguracija bloka Step za dvije skokovite promjene ulaznog napona(1-20) serijskog RLC kruga prikazana je u videozapisu 1.5 (9:08).
Rjesenje 1.9
Konfiguracija dva bloka Step za tri skokovite promjene ulaznognapona (1-21) serijskog RLC kruga prikazana je u videozapisu 1.6 (4:39).
Rjesenje 1.10
Konfiguracija pocetnih uvjeta na integratorima u simulacijskoj shemiRLC kruga prikazana je u videozapisu 1.7 (6:49).
Rjesenje 1.11
Odzivi serijskog RLC kruga na harmonijsku promjenu ulaznog napona(1-10) prikazani su u videozapisu 1.8 (8:55).
1.1. Serijski RLC krug 17
1s
Integrator
1s
Integrator1
1/(L*C)
Gain
R*C
Gain1
u_C(t)
C
Gain2i(t)
1
T^2.s +2*zeta*Ts+12
Transfer Fcn
u(t)
Sine Wave D2uC uCDuC
Video 1.1. Unos simulacijske sheme serijskog RLC kruga i podesavanjeosnovnih postavki (13:03).
Video 1.2. Postupak konfiguracije bloka prijenosne funkcije serijskogRLC kruga (3:38).
Video 1.3. Postupak pokretanja simulacije i snimanja odziva serijskogRLC kruga (5:07).
Video 1.4. Utjecaj promjene iznosa otpora R na odzive serijskog RLCkruga (6:25).
1.1. Serijski RLC krug 18
Video 1.5. Konfiguracija bloka Step za dvije skokovite promjeneulaznog napona (1-20) serijskog RLC kruga (9:08).
Video 1.6. Konfiguracija dva bloka Step za tri skokovite promjeneulaznog napona (1-21) serijskog RLC kruga (4:39).
Video 1.7. Konfiguracija pocetnih uvjeta na integratorima usimulacijskoj shemi RLC kruga (6:49).
Video 1.8. Odzivi serijskog RLC kruga na harmonijsku promjenuulaznog napona (1-10) (8:55).
1.2. Elektronicki energetski pretvaraci 19
1.2. Elektronicki energetski pretvaraciElektronicki energetski pretvaraci su uredaji koji mijenjaju tehnickeparametre elektricne energije (napon, frekvencija, . . . ) [3]. Pri tomeje nuzno ostvariti minimalne gubitke energije u elektronickim kompo-nentama pretvaraca, odnosno postici cim vecu ucinkovitost pretvorbe.
Pretvaraci se prema vrsti pretvorbe dijele na istosmjerne pretvarace(engl. DC-DC converters), izmjenjivace (engl. inverters ili DC-AC con-verters) i ispravljace (engl. rectifiers ili AC-DC converters) [4, 5, 6].
Istosmjerni pretvaraci pretvaraju istosmjerni napon nekog iznosa u isto-smjerni napon veceg ili manjeg iznosa. Osnovni tipovi istosmjernih pre-tvaraca su:
silazni (engl. step-down ili buck), uzlazni (engl. step-up ili boost), silazno-uzlazni (engl. buck-boost).
Silazni pretvarac smanjuje ulazni napon, uzlazni ga povecava, a uzlazno-silazni ima mogucnost povecavanja i smanjivanja ulaznog napona.
Izmjenjivaci pretvaraju istosmjerni napon odredenog iznosa u izmjeni-cni napon odredenog broja faza, amplitude i frekvencije, dok ispravljacirade obrnuto od izmjenjivaca.
Za svaki od navedenih tipova pretvaraca postoji vise topologija kojeostvaruju opisane funkcije, a osnovna podjela je na topologije bez galva-nskog odvajanja te na topologije s galvanskim odvajanjem ulaza i izlaza.
1.2.1. Uzlazni istosmjerni pretvaracU ovom poglavlju modelirat ce se uzlazni istosmjerni pretvarac bez ga-lvanskog odvajanja u naponskom nacinu upravljanja, iz razloga sto imajednostavnu izvedbu, tj. mali broj energetskih i pasivnih komponenti, atime i mogucu visoku ucinkovitost. Za vise detalja o modelu pogledajte[3].
Slika 1.3. Nacelna shema uzlaznog istosmjernog pretvaraca.
Nacelna shema uzlaznog istosmjernog pretvaraca prikazana je na slici1.3.
U analizi strujnog kruga sa slike 1.3 pretpostavlja se da su elektronickekomponente idealne. To znaci da se uzima da je pad napona na tranzi-storu T1 u stanju vodenja jednak nuli, kao i struja kroz tranzistor T1 ustanju nevodenja. Nadalje, napon koljena diode D1 (pad napona na diodipri propusnoj polarizaciji) jednak je nuli, kao i reverzna struja zasicenjadiode D1.
Izlazni napon pretvaraca regulira se otvaranjem i zatvaranjem tranzi-storske sklopke T1.
Ukoliko struja zavojnice iL tokom jednog perioda pilastog napona nepadne na nulu, pretvarac je u kontinuiranom rezimu rada.
U tom slucaju, vremenski period T , odreden sklopnom frekvencijom(frekvencija pilastog napona) f = 1/T , moze se podijeliti u dva vreme-nska intervala: vrijeme kad je tranzistorska sklopka T1 ukljucena D Ti vrijeme kad je iskljucena (1 D) T . Oznaka D predstavlja tzv. fa-ktor upravljanja (engl. duty cycle), tj. odnos vremena vodenja tranzisto-rske sklopke i ukupnog perioda. Ovakav nacin upravljanja tranzistorskomsklopkom naziva se pulsno-sirinska modulacija (engl. Pulse Width Mod-ulation ili skraceno PWM modulacija). Pojednostavljene sheme koje vri-jede za navedena dva slucaja dane su na slikama 1.4 i 1.5.
Parametri uzlaznog pretvaraca nazivne snage 450 W i sklopne frekve-
1.2. Elektronicki energetski pretvaraci 20
Slika 1.4. Elektricna shema istosmjernog uzlaznog pretvaraca sukljucenom tranzistorskom sklopkom T1.
Slika 1.5. Elektricna shema istosmjernog uzlaznog pretvaraca siskljucenom tranzistorskom sklopkom T1.
ncije 100 kHz su:
L = 11 H, RL = 10 m,C = 3760 F, RC = 20 m,R = 5 .
(1-22)
Zadatak 1.12Zadatak za samostalni rad studenta. Modelirajte pojedine dijelove
uzlaznog pretvaraca prikazanog na slici 1.3 s obzirom na stanje tranzi-storske sklopke T1. Modelirajte najprije elektricnu shemu prikazanu naslici 1.4 (odredite posebno diferencijalnu jednadzbu za struju iL i drugudiferencijalnu jednadzbu za izlazni napon ui), a zatim shemu sa slike 1.5(jedna diferencijalna jednadzba po izlaznom naponu ui. Simulirajte objesheme i snimite odzive struje zavojnice iL i izlaznog napona ui na pro-mjenu ulaznog napona:
uu(t) = 20 S(t) V. (1-23)
Rjesenje 1.12Diferencijalna jednadzba po struji zavojnice (slika 1.4):
Ld iLd t
+ RLiL = uu.
Diferencijalna jednadzba po izlaznom naponu (slika 1.4):
d uid t
+1
(RC + R) Cui = 0.
Diferencijalna jednadzba po izlaznom naponu (slika 1.5):
LCd2uid t2
+
(L
RC + R+ RLC +
RCRRC + R
C)
d uid t
+RL + RRC + R
ui =
=RCR
RC + RC
d uud t
+R
RC + Ruu.
1.3. PEM gorivne celije 21
1.3. PEM gorivne celijeGorivna celija (engl. fuel cell) je uredaj koji pretvara kemijsku ene-rgiju goriva, tipicno vodika, direktno u elektricnu energiju. Celija seu osnovi sastoji od elektrolita (membrane) smjestene izmedu dvije ele-ktrode, anode i katode. Ovisno o vrsti elektrolita koju koriste, gorivnecelije dijele se u nekoliko grupa [7]:
Alkalne gorivne celije (engl. Alkaline Fuel Cells AFC) koristekoncentrirani kalijev hidroksid KOH kao elektrolit za vise radne te-mperature (250 C), te manje koncentrirani KOH za nize radne te-mperature (< 250 C). Koristene su u svemirskom programu Apolloi Space Shuttle od sezdesetih godina proslog stoljeca.
PEM gorivne celije (engl. Polymer Electrolyte Membrane Fuel Cellsili Proton Exchange Membrane Fuel Cells PEMFC) koriste tankupolimersku membranu kao elektrolit, koja ima svojstvo vodenja pro-tona. Radna temperatura im se krece od 60 do 120 C.
Gorivne celije s fosfornom kiselinom (engl. Phosphoric Acid FuelCells PAFC) koriste koncentriranu fosfornu kiselinu kao elektrolit.Radna temperatura im je tipicno izmedu 150 i 220 C.
Gorivne celije s rastaljenim karbonatom (engl. Molten CarbonateFuel Cells MCFC) koriste kombinaciju alkalnih karbonata kaoelektrolit. Radne temperature se im krecu izmedu 600 i 700 C.
Gorivne celije s cvrstim oksidom (engl. Solid Oxide Fuel Cells SOFC) koriste cvrsti, nepropusni metalni oksid kao elektrolit. Radena temperaturama od 800 do 1000 C.
U ovom poglavlju ukratko je opisana PEM gorivna celija, zbog neko-liko pozeljnih svojstava. Radna temperatura im je relativno niska, stoolaksava integriranje sustava s gorivnom celijom. Imaju manju masu iobujam u odnosu na ostale tipove gorivnih celija, sto im daje veliku pre-dnost u automobilskim i ostalim transportnim aplikacijama. Zbog nacelne
Slika 1.6. Princip rada gorivne celije.
jednostavnosti izvedbe, danas u svijetu dominiraju istrazivanja upravoPEM gorivnih celija.
1.3.1. Princip rada i osnovne elektrokemijske reakcije
Princip rada PEM gorivne celije prikazan je slici 1.6. Srce celije jepolimerska membrana, koja je nepropusna za plinove, ali vodljiva je zaprotone. Protoni stoga prolaze kroz membranu s anode prema katodi, aelektroni s anode na katodu stizu preko vanjskog strujnog kruga, tvorecitako elektricnu struju.
Membrana se ponasa kao elektrolit, koji je stisnut izmedu dvije pro-
1.3. PEM gorivne celije 22
pusne, elektricki vodljive elektrode. Elektrode su tipicno napravljene odkarbonskog platna ili papira od karbonskih vlakana. Moraju biti propusnekako bi plinovi difuzijom mogli doci do membrane. Veza izmedu propu-snih elektroda i membrane je reakcijski sloj s katalizatorskim cesticama,tipicno platine podrzane karbonom. Osnovne elektrokemijske reakcijedogadaju se upravo na povrsini katalizatora, na reakcijskom sloju izmedumembrane i elektroda:
Na anodi:H2 2H+ + 2e, (1-24)
Na katodi:12
O2 + 2H+ + 2e H2O, (1-25)
Ukupna reakcija:H2 +
12
O2 H2O. (1-26)
Buduci da svaka celija generira oko 1 V, vise celija spaja se u serijui tako formira clanak (engl. stack), ciji izlazni napon moze varirati odnekoliko volti do nekoliko stotina volti, ovisno o aplikaciji.
Detaljan model gorivne celije opisan je u [3]. U ovom poglavlju danaje nadomjesna elektricna shema dinamickog modela gorivne celije.
Naboj na spoju izmedu elektrode i elektrolita, ili u blizini spoja, djelujeu gorivnoj celiji kao spremnik naboja, odnosno elektricne energije. Nataj nacin se zapravo gorivna celija ponasa kao elektricni kondenzator. Uengleskoj terminologiji ovaj efekt je poznat pod nazivom charge doublelayer effect. Pri promjeni napona celije potrebno je neko vrijeme da sepromjena naboja ustabili na vrijednosti koja odgovara novoj vrijednostigenerirane struje.
Na slici 1.7 prikazana je nadomjesna elektricna shema dinamickog mo-dela gorivne celije. Nadomjesna shema prikazana na slici 1.7 ujedno je inajcesci pocetni model za proucavanje ponasanja razlicitih vrsta baterija,samo su parametri i oznake nesto drugaciji u odnosu na gorivnu celiju.
Slika 1.7. Nadomjesna elektricna shema dinamickog modela gorivnecelije.
1.4. Zadaci za samostalni rad studenta 23
Elektromotorna sila E te otpori Ra i Rohm su u potpunom matematickommodelu promjenjive velicine [3]. Za potrebe vjezbe ovdje cemo te inacepromjenjive velicine smatrati konstantnima. Zadani parametri celije susljedeci:
E = 1,185 V, Ra = 0,65 , Rohm = 7,5 m, C = 3 F. (1-27)
Dodatno, na izlazne stezaljke dodajte otporni teret iznosa R = 3 .
Zadatak 1.13Zadatak za samostalni rad studenta. Modelirajte gorivnu celiju prema
nadomjesnoj shemi sa slike 1.7. Koristite parametre celije (1-27) te otpo-rni teret iznosa R = 3 .
Izlazna velicina sustava neka bude napon celije ucell, a struja celije iFCneka takoder bude velicina za prikaz na osciloskopu. Elektromotorna silaE je konstantnog iznosa (nije ju moguce promijeniti na realnoj celiji).
Rjesenje 1.13Diferencijalna jednadzba po naponu uC glasi:
C (R + Rohm)d uCd t
+
(1 +
R + RohmRa
)uC = E,
pri cemu su napon celije i struja jednaki:
ucell =R
R + Rohm(E uC) ,
iFC =1R
ucell.
Diferencijalna jednadzba po naponu celije ucell glasi:
C(R + Rohm)2
R d ucell
d t+
(1 +
R + RohmRa
) R + Rohm
R ucell =
= C (R + Rohm)d Ed t
+R + Rohm
RaE.
1.4. Zadaci za samostalni rad studenta
Zadatak 1.14Za pasivni elektricni sustav prikazan na slici 1.8 odredite prijenosnu
funkciju G(s) =I2(s)U(s)
te pripadajucu diferencijalnu jednadzbu ako je
zadano: R1 = R2 = 1 , L = 1 H, C = 1 F.
Rjesenje 1.14
G (s) =I2 (s)U (s)
=s2
2s2 + 2s + 1
2d2i2 (t)
d t2+ 2
d i2 (t)d t
+ i2 (t) =d2u (t)
d t2
+
u (t)
i1(t) R1
L C
R2i2(t)
u C (t)+
Slika 1.8. Elektricna shema sustava uz zadatak 1.14.
1.4. Zadaci za samostalni rad studenta 24
Zadatak 1.15Za pasivni elektricni sustav prikazan na slici 1.9 odredite prijenosnu
funkciju G(s) =UC(s)U(s)
te pripadajucu diferencijalnu jednadzbu ako je
zadano: R1 = R2 = 1 , L = 1 H, C = 1 F.Na temelju dobivene prijenosne funkcije skicirajte odziv napona uC(t)
na promjenu ulaznog napona u(t) = S(t) V.
Rjesenje 1.15
G (s) =UC (s)U (s)
=0,5
s2 + 0,5s + 1
d2uC (t)d t2
+ 0,5d uC (t)
d t+ uC (t) = 0,5u (t)
+
u (t)
i1(t) R1 L
CR2
i2(t)
u C (t)+
Slika 1.9. Elektricna shema sustava uz zadatak 1.15.
Zadatak 1.16Za pasivni elektricni sustav prikazan na slici 1.10 odredite prijenosnu
funkciju G(s) =UC(s)U(s)
te pripadajucu diferencijalnu jednadzbu ako je
zadano: R1 = R2 = 2 , L = 1 H, C = 0,25 F. Dobivenu prijenosnufunkciju zapisite na nacin da nazivnik bude monicki polinom.
Rjesenje 1.16
UC (s)U (s)
=2
s2 + 2s + 2
d2uC (t)d t2
+ 2d uC (t)
d t+ 2uC (t) = 2u (t)
+
u (t)
i1(t)
R1
L
C
R2i2(t)
u C (t)+
Slika 1.10. Elektricna shema sustava uz zadatak 1.16.
1.4. Zadaci za samostalni rad studenta 25
Zadatak 1.17Za pasivni elektricni sustav prikazan na slici 1.11 odredite prijenosnu
funkciju G(s) =IL(s)U(s)
te pripadajucu diferencijalnu jednadzbu ako je
zadano: R1 = R2 = 2 , L = 1 H, C = 0,25 F. Dobivenu prijenosnufunkciju zapisite na nacin da nazivnik bude monicki polinom.
Rjesenje 1.17
I2 (s)U (s)
=s
s2 + 4s + 8
d2i2 (t)d t2
+ 4d i2 (t)
d t+ 8i2 (t) =
d u (t)d t
+
u (t)
i1(t)
R1 L
C R2i2(t)
Slika 1.11. Elektricna shema sustava uz zadatak 1.17.
Zadatak 1.18Za pasivni elektricni sustav prikazan na slici 1.12 odredite prijenosnu
funkciju G(s) =U2(s)U(s)
te pripadajucu diferencijalnu jednadzbu ako je
zadano: R1 = R2 = 1 , C1 = C2 = 1 F. Dobivenu prijenosnu funkcijuzapisite na nacin da nazivnik bude monicki polinom.
Rjesenje 1.18
U2 (s)U (s)
=s2
s2 + 3s + 1
d2u2 (t)d t2
+ 3d u2 (t)
d t+ u2 (t) =
d2u (t)d t2
+
u (t)
i1(t)
R1
C1
R2
i2(t) C2
u 2(t)
+
Slika 1.12. Elektricna shema sustava uz zadatak 1.18.
1.4. Zadaci za samostalni rad studenta 26
Zadatak 1.19Za pasivni elektricni sustav prikazan na slici 1.13 odredite prijenosnu
funkciju G(s) = U3(s)U(s) te pripadajucu diferencijalnu jednadzbu ako jezadano: R1 = R2 = R3 = 1 , C = 1 F, L = 1 H. Dobivenu prijenosnufunkciju zapisite na nacin da nazivnik bude monicki polinom.
Rjesenje 1.19
U3 (s)U (s)
=0,5s
s2 + 2s + 1
d2u3 (t)d t2
+ 2d u3 (t)
d t+ u3 (t) = 0,5
d u (t)d t
+
u (t)
R1
R2
C
u 3(t)
+
L
R3
Slika 1.13. Elektricna shema sustava uz zadatak 1.19.
Zadatak 1.20Za pasivni elektricni sustav prikazan na slici 1.14 odredite prijenosnu
funkciju G(s) = U3(s)U(s) te pripadajucu diferencijalnu jednadzbu ako jezadano: R1 = R2 = R3 = 1 , C = 1 F, L = 1 H. Dobivenu prijenosnufunkciju zapisite na nacin da nazivnik bude monicki polinom.
Rjesenje 1.20
U3 (s)U (s)
=0,5s
s2 + 2s + 1
d2u3 (t)d t2
+ 2d u3 (t)
d t+ u3 (t) = 0,5
d u (t)d t
+
u (t)
R1
R2
C
u 3(t)
+
L
R3
Slika 1.14. Elektricna shema sustava uz zadatak 1.20.
1.4. Zadaci za samostalni rad studenta 27
Zadatak 1.21Za pasivni elektricni sustav prikazan na slici 1.15 odredite prijenosnu
funkciju G(s) = I2(s)I(s) te pripadajucu diferencijalnu jednadzbu ako jezadano: R1 = 1 , C1 = 1 F, R2 = 2 , C2 = 2 F. Dobivenu prijenosnufunkciju zapisite na nacin da nazivnik bude monicki polinom.
Rjesenje 1.21
I2 (s)I (s)
=C2 (1 + R1C1s)
(R1 + R2) C1C2s + C1 + C2=
13 (s + 1)
s + 12d i2 (t)
d t+
12
i2 (t) =13
d i (t)d t
+13
i (t)
i (t)
i1(t)
R1C2
R2i2(t)
C1
Slika 1.15. Elektricna shema sustava uz zadatak 1.21.
Poglavlje 2
Prikaz sustava u prostoru stanja
U poglavlju 1 dani su primjeri opisa sustava n-tog reda (n spremnikaenergije, gdje je n bio 1 ili 2) diferencijalnom jednadzbom n-tog reda.
Prikaz sustava u prostoru stanja (engl. state-space representation) jematematicki model realnog sustava kao skup ulaznih i izlaznih varijabli tetzv. varijabli stanja povezanih diferencijalnim jednadzbama prvog reda[8]. Ako je promatrani sustav n-tog reda, onda ce prikaz tog sustava uprostoru stanja sadrzavati n diferencijalnih jednadzbi prvog reda.
Za potrebe projektiranja sustava automatskog upravljanja, u ovompoglavlju razmatrat ce se prikaz u prostoru stanja kontinuiranih linearnihvremenski nepromjenjivih sustava (engl. continuous linear time invari-ant, LTI). Ako je promatrani sustav nelinearan, pristupa se postupku li-nearizacije sustava u radnoj tocki, te se nakon tog postupka sustav mozeprikazati u prostoru stanja u okolini radne tocke.
Kontinuirani linearni vremenski nepromjenjivi sustavi s r ulaza, qizlaza i n varijabli stanja mogu se prikazati u sljedecem obliku jednadzbestanja i izlazne jednadzbe [1, 8]:
x (t) = Ax (t) + Bu (t) , (2-1)
y (t) = Cx (t) + Du (t) , (2-2)
gdje je:
x vektor varijabli stanja, dimenzije n 1,
u ulazni (upravljacki) vektor, dimenzije r 1, y izlazni vektor, dimenzije q 1, A matrica sustava (matrica stanja), dimenzije n n; B ulazna matrica, dimenzije n r; C izlazna matrica, dimenzije q n; D matrica direktnog prijenosa, dimenzije q r.Pri citanju treba primjetiti da podebljane (bold) oznake predstavljaju
vektore i matrice, dok kose (italic) oznake predstavljaju skalarne velicine.Oznaka x predstavlja derivaciju vektora varijabli stanja po vremenu t i
koristi se radi kraceg zapisa diferencijalnih jednadzbi:
x(t) :=d x(t)
d t. (2-3)
Primjenom Laplaceove transformacije na jednadzbu stanja (2-1) dobivase:
sX (s) = AX (s) + BU (s)sX (s) AX (s) = BU (s)(sI A) X (s) = BU (s) ,
(2-4)
29
iz cega slijedi izraz za vektor stanja u Laplaceovom podrucju:
X (s) = (sI A)1BU (s) . (2-5)Primjenom Laplaceove transformacije na izlaznu jednadzbu (2-2) do-
biva se:Y (s) = CX (s) + DU (s) . (2-6)
Uvrstavanjem vektora stanja (2-5) u izlazni vektor (2-6) dobiva se:
Y (s) = C(sI A)1BU (s) + DU (s) . (2-7)iz cega slijedi konacni izraz za izlazni vektor u Laplaceovom podrucju:
Y (s) =[C(sI A)1B + D
]U (s) . (2-8)
Dijeljenjem izlaznog vektora (2-8) s ulaznim vektorom u Laplaceovompodrucju dobiva se prijenosna matrica sustava:
G (s) =Y (s)U (s)
= C(sI A)1B + D. (2-9)
Prijenosna matrica (2-9) je dimenzije qr i sastoji se od qr prijenosnihfunkcija, koje povezuju i-ti izlaz i j-ti ulaz sustava:
Gi, j (s) =Yi (s)U j (s)
. (2-10)
Sve pojedine prijenosne funkcije Gi, j(s) imaju zajednicki nazivnik.U slucaju sustava s jednim ulazom (r = 1) i jednim izlazom (q = 1)
(engl. single-input single-output, SISO), prijenosna matrica je dimenzije1 1, odnosno to je prijenosna funkcija sustava G(s).
Stabilnost kontinuiranog linearnog vremenski nepromjenjivog sustavamoze se odrediti iz svojstvenih vrijednosti (engl. eigenvalues) matricestanja A. Svojstvene vrijednosti su korjeni karakteristicnog polinomasustava, te ujedno i polovi prijenosne funkcije sustava. Karakteristicni
polinom se iz matrice stanja A dobiva racunanjem determinante matricesI A:
(s) = det (sI A). (2-11)Svojstvene vrijednosti se dobivaju izjednacavanjem karakteristicnog
polinoma s nulom i rjesavanjem tako dobivene algebarske jednadzbe:
(s) = det (sI A) = 0. (2-12)
Kontinuirani linearni vremenski nepromjenjivi sustav ce biti asimpto-tski stabilan ako sve svojstvene vrijednosti imaju negativan realni dio,odnosno nalaze se u lijevoj poluravnini kompleksne s-ravnine.
Sustav je upravljiv ako je pomocu njegovih ulaza moguce dovesti va-rijable stanja iz bilo kojeg pocetnog stanja u bilo koje zeljeno konacnostanje, u prihvatljivom vremenu. Kontinuirani linearni vremenski ne-promjenjivi sustav je upravljiv ako i samo ako vrijedi:
rang (U) = n, (2-13)
gdje je rang matrice jednak broju njenih linearno nezavisnih redaka, aUje matrica upravljivosti dimenzije nnr, koja se racuna na sljedeci nacin:
U =[
B AB A2B . . . An1B]. (2-14)
Sustav je osmotriv ako se promatranjem izlaznih velicina sustavamogu dohvatiti sve varijable stanja sustava. Osmotrivost i upravljivostsu matematicki duali. Upravljivost omogucava dovodenje iz pocetnog ukonacno stanje sustava pomocu njegovih ulaza, a osmotrivost omogucavada poznavanje izlazne trajektorije sustava pruza dovoljno informacija zapredikciju pocetnog stanja sustava. Kontinuirani linearni vremenski ne-promjenjivi sustav je osmotriv ako i samo ako vrijedi:
rang (O) = n, (2-15)
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 30
gdje je Omatrica osmotrivosti dimenzije nqn, koja se racuna na sljedecinacin:
O =
C
CACA2...
CAn1
. (2-16)
Izbor varijabli stanja sustava moze se obaviti na vise nacina. Mozebiti temeljen na fizikalnim varijablama sustava ili nefizikalnim. Jedini jeuvjet da varijable stanja moraju biti nezavisne, tj. da se jedna varijablastanja ne moze dobiti iz drugih linearnom kombinacijom. Broj varijablistanja najcesce je jednak redu diferencijalne jednadzbe sustava, odnosnobroju spremnika energije u tom sustavu. Iako prikaz sustava varijablamastanja moze biti razlicit ovisno o odabiru varijabli stanja, veza izmedutih razlicitih prikaza je jednoznacna, jer su svojstvene vrijednosti sustavajednake neovisno o realizaciji, odnosno izboru varijabli stanja.
2.1. Izbor varijabli stanja temeljen nafizikalnim velicinama sustava
Varijable stanja kao fizikalne velicine sustava najcesce su velicine koje sumjera spremnika energije.
U elektricnim sustavima postoje spremnici naboja i magnetske ene-rgije. Spremnik naboja je kondenzator, a mjera spremljene energije jenaboj q ili uobicajenije napon na kondenzatoru, koji je direktno propo-rcionalan naboju preko kapaciteta kondenzatora u = q/C (eC = 0,5Cu2).Spremnik magnetske energije je zavojnica, a mjera energije spremljene uzavojnici je struja zavojnice (eL = 0,5Li2).
Zbog toga se pri modeliranju elektricnih krugova varijablama stanjanajcesce koriste naponi na kondenzatorima i struje kroz zavojnice kaovarijable stanja sustava.
Izbor fizikalnih varijabli stanja za ostale vrste sustava bit ce opisani unarednim poglavljima.
2.1.1. Prikaz serijskog RLC kruga u prostoru stanja
Kao varijable stanja serijskog RLC kruga prikazanog na slici 1.1 odabiruse napon na kondenzatoru uC i struja zavojnice i. Matricni prikaz vektorastanja je onda sljedeci:
x =[
x1x2
]=
[uCi
]. (2-17)
Zadatak 2.1Odredite jednadzbu stanja serijskog RLC kruga uz odabir varijabli
stanja prema (2-17).
Zadatak 2.2Odredite izlaznu jednadzbu serijskog RLC kruga uz odabir sljedeca tri
izlazna vektora:y = uC, (2-18)
y = i, (2-19)
y =[
uCi
]. (2-20)
Rjesenje 2.1Buduci da je u opisu jednadzbe stanja potrebno izraziti derivacije vari-
jabli stanja, za elektricne sustave prvo se izrazavaju struje kondenzatora i
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 31
naponi na zavojnicama. U primjeru serijskog RLC kruga dobije se:
iC (t) = Cd uC (t)
d t= i(t),
uL (t) = Ld i (t)
d t= u (t) Ri (t) uC (t) .
(2-21)
Zatim se u izraze (2-21) umjesto fizikalnih varijabli uC i i uvrstavajuvarijable stanja x1 i x2:
Cd x1 (t)
d t= x2 (t) ,
Ld x2 (t)
d t= u (t) Rx2 (t) x1 (t) .
(2-22)
Preostaje dijeljenje s L i C, kraci zapis derivacija i izostavljanje vre-mena t, te razmjestaj clanova na nacin da se prvo pisu clanovi uz varijablestanja po redoslijedu te na kraju clanovi uz ulazne velicine:
x1 =1C
x2,
x2 = 1L x1 RL
x2 +1L
u.(2-23)
Iz jednadzbi stanja (2-23) slijedi i matricni prikaz jednadzbe stanja:[x1x2
]
x
=
[0 1C 1L RL
]
A
[x1x2
]
x
+
[01L
]
B
u (2-24)
Buduci da je ulaz serijskog RLC kruga napon u(t), onda je ulazni vektorzapravo skalar i u ovom primjeru slucajno ima istu oznaku u = u.
Rjesenje 2.2
Uz odabir napona kondenzatora kao izlazne velicine sustava (2-18) do-bije se sljedeca izlazna jednadzba u matricnom obliku:
y = uC = x1,
y =[
1 0]
C
[
x1x2
]+ [0]
D
u (2-25)
Uz odabir struje zavojnice kao izlazne velicine sustava (2-19) dobije sesljedeca izlazna jednadzba u matricnom obliku:
y = i = x2,
y =[
0 1]
C
[
x1x2
]+ [0]
D
u (2-26)
Uz odabir obje varijable stanja kao izlazne velicine sustava (2-20) do-bije se sljedeca izlazna jednadzba u matricnom obliku:
y =[
uCi
]=
[x1x2
]y =
[1 00 1
]
C
[
x1x2
]+
[00
]
D
u (2-27)
2.1.2. Simulacija serijskog RLC kruga pomocu varijablistanja
Zadatak 2.3Implementirajte jednadzbe stanja (2-23) i izlaznu jednadzbu (2-27) u
Simulinku, uz koristenje osnovnih blokova (integrator, mnozenje s ko-nstantom i sumator) i parametara RLC kruga (1-9). Snimite odziv na pro-
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 32
mjenu ulaznog napona (1-8) te usporedite rezultate s onima iz poglavlja1.1.2.
Zadatak 2.4U simulacijsku shemu dodajte tri bloka State-Space. Unesite u
blokove matrice A i B iz jednadzbe stanja (2-24) te tri matrice C i Dza svaki blok State-Space prema izlaznim jednadzbama (2-25), (2-26)i (2-27). Ulaze blokova State-Space spojite na isti izvor ulaznog si-gnala (napona), a na izlaze blokova direktno spojite zasebne osciloskope.Zatim simulirajte shemu i usporedite rezultate s rezultatima iz prethodnogzadatka. Na izlaz State-Space bloka s implementiranom izlaznom je-dnadzbom (2-27) (dva izlaza) dodajte blok demultipleksora Demux s dvaizlaza, kako bi razdvojili dvije izlazne velicine. Na oba izlaza iz demulti-pleksora spojite osciloskop i ponovite simulaciju.
Zadatak 2.5Shemama iz prethodnih zadataka dodajte implementaciju osnovnih
jednadzbi u prostoru stanja (2-1) i (2-2). Za tu svrhu dovoljan je jedanintegrator, dva sumatora i cetiri bloka za mnozenje s konstantom (Gain)u koje se upisuju matrice A, B, C (2-27) i D. U blokovima Gain do-datno je potrebno namjestiti opciju matricnog mnozenja (Matrix(K*u)(u vector)). Ulaz spojite na postojeci izvor napona. Na izlaz spojiteosciloskop, izvrsite simulaciju i usporedite dobivene rezultate s rezulta-tima iz prethodnih zadataka.
Zadatak 2.6Pomocu naredbe ss formirajte tri sustava za sva tri slucaja odabira
izlazne velicine sustava (2-18), (2-19) i (2-20). Zatim pomocu naredbess2tf izracunajte prijenosnu funkciju (matricu) sva tri sustava. Pri-jenosne funkcije prikazite na nacin da je slobodni clan u nazivniku jednak1. Dodajte u simulacijsku shemu blokove prijenosne funkcije te uspore-dite dobivene odzive izlaznih velicina sustava s odzivima iz prethodnih
1s
Integrator
1s
Integrator1
1/C
Gain
1/L
Gain1
R/L Gain2
1/L
Gain3u i_L
u_C
x_2
x_1
Slika 2.1. Simulacijska shema serijskog RLC kruga u prostoru stanja.
zadataka.
Zadatak 2.7Pomocu naredbi Matlaba i Control System Toolboxa eig i roots odre-
dite svojstvene vrijednosti sustava i polove prijenosne funkcije. Pomocunaredbi ctrb, obsv i rank odredite da li je sustav upravljiv i osmotriv zasva tri slucaja odabira izlazne velicine sustava (2-18), (2-19) i (2-20).
Rjesenje 2.3Moguci izgled simulacijske sheme prikazan je na slici 2.1.
Rjesenje 2.4Pri konfiguraciji blokova potrebno je pazljivo unositi vrijednosti ma-
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 33
u(t)
1s
Integrator
K*uvec
B
K*uvec
A
K*uvec
C y(t)
K*uvec
D
x(t)
Slika 2.2. Implementacija jednadzbe stanja (2-1) i izlazne jednadzbe(2-2) u Simulinku.
trica A, B, C i D. Cesta pogreska je zanemarivanje matrice D kod sustavas vise ulaza i izlaza.
Rjesenje 2.5Moguci izgled simulacijske sheme s implementacijom jednadzbe
stanja (2-1) i izlazne jednadzbe (2-2) u Simulinku prikazan je na slici2.2. U odgovarajuce Gain blokove upisuju se matrice A, B, C i D.
Rjesenje 2.6Prijenosna matrica racuna se iz opisa u prostoru stanja prema izrazu
(2-9). Matlabov Control System Toolbox ima ugradenu funkciju ss2tfza izracun prijenosne funkcije iz opisa u prostoru stanja. Za sustav sjednim ulazom moguce je tom funkcijom dobiti i prijenosnu matricu, aza sustav s r ulaza potrebno je pozvati funkciju ss2tf r puta sa zadnjimargumentom poziva, koji se svakim pozivom inkrementira od 1 do r, terucno formirati prijenosnu matricu. Ovakav primjer bit ce dan u poglavlju4.
U nastavku je prikazana M-skripta potrebna za izracun prijenosnih
funkcija iz opisa u prostoru stanja za primjer serijskog RLC kruga:
%% ciscenje radnog prostora
clear;
%% parametri RLC kruga
R=25;
L=20e-3;
C=50e-6;
%% formiranje tri sustava u prostoru stanja
sys1 = ss([0 1/C;-1/L -R/L],[0;1/L],[1 0],[0])
sys2 = ss([0 1/C;-1/L -R/L],[0;1/L],[0 1],[0])
sys3 = ss([0 1/C;-1/L -R/L],[0;1/L],[1 0; 0 1],[0;0])
%% izracun prijenosnih funkcija iz prostora stanja
[num1,den1]=ss2tf(sys1.a, sys1.b, sys1.c, sys1.d, 1);
num1 = num1 / den1(end)
den1 = den1 / den1(end)
G1 = tf(num1,den1)
[num2,den2]=ss2tf(sys2.a, sys2.b, sys2.c, sys2.d, 1);
num2 = num2 / den2(end)
den2 = den2 / den2(end)
G2 = tf(num2,den2)
[num3,den3]=ss2tf(sys3.a, sys3.b, sys3.c, sys3.d, 1);
num3 = num3 / den3(end)
den3 = den3 / den3(end)
G31 = tf(num3(1,:),den3)
G32 = tf(num3(2,:),den3)
Iz dobivenih rezultata u naredbodavnom prozoru Matlaba vidljivo je dasu svi nazivnici prijenosnih funkcija jednaki, jer se radi o istom sustavu.Za sustav sys3 se navedenim postupkom dobila prijenosna matrica di-menzije 2 1, cije pojedine prijenosne funkcije za oba izlaza odgovarajuprijenosnim funkcijama dobivenim iz sustava sys1 i sys2.
Rjesenje 2.7
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 34
Svojstvene vrijednosti sustava dobivaju se iz matrice stanja A (za svatri formirana sustava matrica A je ista) pomocu naredbe eig:
lambda = eig(sys1.a)
Polovi prijenosne funkcije se iz bilo kojeg nazivnika (sva tri su jednaka)prijenosnih funkcija dobivaju naredbom roots:
p = roots(den1)
Iz dobivenih rezultata vidljivo je da su svojstvene vrijednosti sustava ipolovi identicni.
Matrica upravljivosti sustavaU jednaka je za sva tri formirana sustava,jer ovisi o matricama A i B, koje su iste za sva tri sustava. Matrica upra-vljivostiU i njen rang dobivaju se naredbama:U = ctrb(sys1)
rank(U)
Iz dobivenih rezultata u naredbodavnom prozoru Matlaba vidljivo je darang matrice upravljivosti iznosi 2, sto je jednako redu sustava, te je prematome ovaj sustav upravljiv.
Za tri realizacije sustava potrebno je izracunati i tri matrice osmotrivo-sti O1, O2 i O3 te njihove rangove. To se moze napraviti pomocu sljedecihnaredbi:
O1 = obsv(sys1)
rank(O1)
O2 = obsv(sys2)
rank(O2)
O3 = obsv(sys3)
rank(O3)
Iz dobivenih rezultata u naredbodavnom prozoru Matlaba vidljivo je darangovi matrica osmotrivosti za sve tri realizacije sustava iznose 2, stoodgovara redu sustava, pa slijedi da su sve tri realizacije sustava osmo-trive.
2.1.3. Prikaz uzlaznog pretvaraca u prostoru stanja
Zadatak 2.8Zadatak za samostalni rad studenta. Modelirajte u prostoru stanja po-
jedine dijelove uzlaznog pretvaraca prikazanog na slici 1.3 s obzirom nastanje tranzistorske sklopke T1. Modelirajte najprije elektricnu shemuprikazanu na slici 1.4 (to je jedan sustav drugog reda!), a zatim shemusa slike 1.5. Za izlazne velicine u oba slucaja odaberite najprije izlazninapon ui, zatim struju zavojnice iL te konacno obje te velicine. Za sveslucajeve ispitajte upravljivost i osmotrivost. Simulirajte obje sheme isnimite odzive izlaznih velicina sustava na promjenu ulaznog napona:
uu(t) = 20 S(t) V. (2-28)
Rjesenje 2.8Odabirom napona na kondenzatoru x1 = uC i struje kroz zavojnicu
x2 = iL kao varijabli stanja, te y1 = ui i y2 = iL kao izlaznih velicinasustava, dobiva se opis sustava prikazanog na slici 1.4 u prostoru stanja:[
x1x2
]=
[ 1(RC+R)C 00 RLL
][
x1x2
]+
[01L
] uu,[
y1y2
]=
[ RRC+R
00 1
][
x1x2
].
(2-29)
Uz isti odabir varijabli stanja i izlaznih velicina, za sustav na slici 1.5dobiva se sljedeci opis u prostoru stanja:[
x1x2
]=
1(RC+R)C R(RC+R)C 1L RRC+R 1L (RL + RCRRC+R) [ x1x2
]+
[01L
] uu,[
y1y2
]=
[ RRC+R
RCRRC+R
0 1
][
x1x2
].
(2-30)
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 35
Zadatak 2.9Zadatak za samostalni rad studenta. Usporedite jednadzbe uzlaznog
pretvaraca (slika 1.3) u prostoru stanja za slucajeve kad je tranzisto-rska sklopka T1 ukljucena (slika 1.4) i kad je tranzistorska sklopka T1iskljucena (slika 1.5). Dijelove u jednadzbama koji se razlikuju posebnozabiljezite. Nakon toga objedinite dva modela, a dijelove koji se u mode-lima razlikuju ukljucujte sklopkom (blok Switch u Simulinku) ovisno ovanjskoj varijabli koja kaze da li je tranzistorska sklopka T1 ukljucena ilinije.
Rjesenje 2.9Moguca simulacijska shema kao rjesenje zadatka 2.9 prikazana je na
slici 2.3.
Zadatak 2.10Zadatak za samostalni rad studenta. Razradite uvjete za sklapanje tra-
nzistorske sklopke u naponskom rezimu rada uz faktor upravljanja (engl.duty cycle) kao ulaznu velicinu i dodajte sklopnu logiku shemi iz zadatka2.9. Na taj nacin formirali ste kompletnu simulacijsku shemu uzlaznogpretvaraca u naponskom rezimu rada.
Rjesenje 2.10Moguca simulacijska shema kao rjesenje zadatka 2.10 prikazana je na
slici 2.4. Shema je realizirana s dva podsustava (Subsystem) prikazanaslikama 2.5 i 2.6.
2.1.4. Prikaz gorivne celije u prostoru stanja
Zadatak 2.11Zadatak za samostalni rad studenta. Modelirajte gorivnu celiju prema
1s
Integrator
-1/(R_C+R)/C
-1/L*R/(R_C+R)
-1/L*(R_L+R_C*R/(R_C+R))
R/(R_C+R)/C
1s
Integrator1 i_L
u_C
u_i
R/(R_C+R)
R_C*R/(R_C+R)
Switch
PulseGenerator
0
Constant
Switch1
u_u
1/L
Switch2
-R_L/L
Switch3
x1
x2
Slika 2.3. Simulacijska shema za Simulink kao rjesenje zadatka 2.9.
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 36
T1 on/off
u_C
i_L
u_i
Energetika pretvaraca Scope
d T1 on/off
Sklopna logika - naponski nacin
upravljanja
d
Slika 2.4. Simulacijska shema za Simulink kao rjesenje zadatka 2.10, spodsustavima sklopne logike i energetskog dijela uzlaznog pretvaraca.
1s
IntegratorPulse
Generator
f_sw
Constant
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 37
nadomjesnoj shemi sa slike 1.7 u prostoru stanja. Koristite parametrecelije (1-27) te otporni teret iznosa R = 3 . Za varijablu stanja odaberitenapon kondenzatora x1 = uC, ulazna velicina je elektromotorna sila E, aizlazne velicine neka budu napon celije y1 = ucell i struja celije y2 = iFC.
Rjesenje 2.11
Model gorivne celije u prostoru stanja s trazenim odabirom varijablestanja i izlaznih velicina glasi:
x1 = 1C(
1R + Rohm
+1Ra
)x1 +
1(R + Rohm) C
E,
[y1y2
]=
1
R + Rohm R
R + Rohm
x1 +
1R + Rohm
RR + Rohm
E.
2.1.5. Zadaci za samostalni rad studenta
Zadatak 2.12
Pasivni elektricni sustav prikazan na slici 1.8 prikazite u prostoru stanjas opcim iznosima parametara, uz odabir x1 = iL, x2 = uC i y = i2. Zatim
iz opisa u prostoru stanja odredite prijenosnu funkciju G(s) =I2(s)U(s)
uz
zadane parametre iz zadatka 1.14: R1 = R2 = 1 , L = 1 H, C = 1 F.
Rjesenje 2.12
[x1x2
]=
R1R2
L (R1 + R2)R1
L (R1 + R2)
R1C (R1 + R2)
1C (R1 + R2)
[
x1x2
]+
R2
L (R1 + R2)1
C (R1 + R2)
uy =
[ R1
R1 + R2 1
R1 + R2
] [x1x2
]+
[1
R1 + R2
]u
Rjesenje drugog dijela zadatka je isto kao i rjesenje zadatka 1.14.
Zadatak 2.13Pasivni elektricni sustav prikazan na slici 1.9 prikazite u prostoru stanja
s opcim iznosima parametara, uz odabir x1 = iL, x2 = uC i y = uC. Zatim
iz opisa u prostoru stanja odredite prijenosnu funkciju G(s) =UC(s)U(s)
uz
zadane parametre iz zadatka 1.15: R1 = R2 = 1 , L = 1 H, C = 1 F.
Rjesenje 2.13
[x1x2
]=
R1R2
L (R1 + R2)1
L1C
0
[
x1x2
]+
R2L (R1 + R2)0 u
y =[
0 1] [ x1
x2
]+ [0] u
Rjesenje drugog dijela zadatka je isto kao i rjesenje zadatka 1.15.
Zadatak 2.14Pasivni elektricni sustav prikazan na slici 1.10 prikazite u prostoru
stanja s opcim iznosima parametara, uz odabir x1 = i1 = iL, x2 = uC i
2.1. Izbor varijabli stanja temeljen na fizikalnim velicinama sustava 38
y = uC.
Rjesenje 2.14
[x1x2
]=
R1R2
L (R1 + R2) R1
L (R1 + R2)R1
C (R1 + R2) 1
C (R1 + R2)
[
x1x2
]+
1L0
uy =
[0 1
] [ x1x2
]+ [0] u
Zadatak 2.15Pasivni elektricni sustav prikazan na slici 1.11 prikazite u prostoru
stanja s opcim iznosima parametara, uz odabir x1 = uC, x2 = i2 = iL iy = iL.
Rjesenje 2.15
[x1x2
]=
1
CR1
1C
1L
R2L
[
x1x2
]+
1
CR11L
uy =
[0 1
] [ x1x2
]+ [0] u
Zadatak 2.16Pasivni elektricni sustav prikazan na slici 1.12 prikazite u prostoru
stanja s opcim iznosima parametara, uz odabir x1 = uC1, x2 = uC2 i y = u2.
Rjesenje 2.16
[x1x2
]=
1
C1
(1R1
+1R2
) 1
R2C1 1
R2C2 1
R2C2
[
x1x2
]+
1
C1
(1R1
+1R2
)1
R2C2
uy =
[1 1
] [ x1x2
]+ [1] u
Zadatak 2.17Pasivni elektricni sustav prikazan na slici 1.13 prikazite u prostoru
stanja s opcim iznosima parametara, uz odabir x1 = iL, x2 = uC i y = u3te parametre R1 = R2 = R3 = 1 , C = 1 F, L = 1 H.
Rjesenje 2.17
[x1x2
]=
1
L
(R1 +
R2R3R2 + R3
)1
LR2
R2 + R31C
R2R2 + R3
1C
1R2 + R3
[
x1x2
]+
1L0
u[
x1x2
]=
321
2121
2
[
x1x2
]+
[10
]u
y =[
R2R3R2 + R3
R3R2 + R3
] [x1x2
]+ [0] u
y =[ 1
21
2
] [ x1x2
]+ [0] u
Zadatak 2.18
2.2. Kanonske realizacije sustava u prostoru stanja 39
Pasivni elektricni sustav prikazan na slici 1.14 prikazite u prostorustanja s opcim iznosima parametara, uz odabir x1 = uC, x2 = iL i y = u3te parametre R1 = R2 = R3 = 1 , C = 1 F, L = 1 H.
Rjesenje 2.18
[x1x2
]=
1
C1
R1 + R2
1C
R2R1 + R2
1L
R2R1 + R2
1L
(R3 +
R1R2R1 + R2
)[
x1x2
]+
1C
1R1 + R2
1L
R2R1 + R2
u
y =[
0 R3] [ x1
x2
]+ [0] u
[x1x2
]=
12
12
123
2
[
x1x2
]+
1212
u
y =[
0 1] [ x1
x2
]+ [0] u
Zadatak 2.19
Pasivni elektricni sustav prikazan na slici 1.15 prikazite u prostorustanja s opcim iznosima parametara, uz odabir x1 = uC1, x2 = uC2 i y = i2te parametre R1 = 1 , C1 = 1 F, R2 = 2 , C2 = 2 F.
Rjesenje 2.19
[x1x2
]=
1
C1 (R1 + R2)1
C1 (R1 + R2)1
C2 (R1 + R2) 1
C2 (R1 + R2)
[
x1x2
]+
R2
C1 (R1 + R2)R1
C2 (R1 + R2)
iy =
[1
R1 + R2 1
R1 + R2
] [x1x2
]+
[R1
R1 + R2
]i
[x1x2
]=
13
13
161
6
[
x1x2
]+
2316
iy =
[ 131
3
] [ x1x2
]+
[13
]i
2.2. Kanonske realizacije sustava u prostorustanja
Prijenosna funkcija sustava s jednim ulazom i jednim izlazom, moze se uopcem slucaju zapisati kao:
G (s) =Y (s)U (s)
=b0sm + b1sm1 + . . . + bm2s2 + bm1s + bm
sn + a1sn1 + . . . + an2s2 + an1s + an. (2-31)
Primijetite da je nazivnik prijenosne funkcije (2-31) zapisan kaomonicki polinom (koeficijent uz najvisu potenciju sn ili vodeci koefici-jent jednak je 1).
Da bi sustav bio kauzalan, red brojnika mora biti manji ili jednak redunazivnika (m n). Kanonske realizacije pogodno je razmatrati uz pre-tpostavku da nema direktnog prijenosa ulaznog signala na izlaz (D = 0),odnosno da je red brojnika strogo manji od reda nazivnika (m < n). Uslucaju da to nije tako, problem se lako moze svesti na polaznu pretposta-vku, kao sto ce biti pokazano u nastavku.
2.2. Kanonske realizacije sustava u prostoru stanja 40
2.2.1. Upravljiva kanonska realizacijaUpravljiva kanonska realizacija varijablama stanja je oblik prikaza su-stava varijablama stanja u kojem se garantira upravljivost sustava. Prijeodabira varijabli stanja, prijenosna funkcija (2-31) se razbija na dva di-jela:
G (s) =Y (s)U (s)
=Z (s)U (s)
Y (s)Z (s)
, (2-32)
gdje su pojedine prijenosne funkcije:
Z (s)U (s)
=1
sn + a1sn1 + . . . + an2s2 + an1s + an, (2-33)
Y (s)Z (s)
= b0sm + b1sm1 + . . . + bm2s2 + bm1s + bm. (2-34)
Iz prijenosne funkcije (2-33) dobiva se diferencijalna jednadzba, iz kojeje zbog kraceg zapisa izostavljena ovisnost pojedinih clanova o vremenu:
z(n) + a1z(n1) + . . . + an2z + an1z + anz = u. (2-35)
Izbor varijabli stanja upravljive kanonske realizacije je sljedeci:
xn = z,xn1 = z = xn,xn2 = z = xn1,...
x2 = z(n2) = x3,
x1 = z(n1) = x2.
(2-36)
Iz jednadzbi (2-36) se direktno vide derivacije varijabli stanja s inde-ksima 2 do n. Derivacija prve varijable stanja dobije se deriviranjemposljednje jednadzbe u (2-36) te iz diferencijalne jednadzbe (2-35):
x1 = z(n) = a1z(n1) a2z(n2) . . . an2z an1z anz + u. (2-37)
Uvrstavanjem jednadzbi (2-36) u derivaciju prve varijable stanja (2-37)dobiva se:
x1 = a1x1 a2x2 . . . an2xn2 an1xn1 anxn + u. (2-38)Iz jednadzbi (2-36) i (2-38) slijedi jednadzba stanja u matricnom
obliku:
x =
a1 a2 . . . an2 an1 an1 0 . . . 0 0 0...
. . .. . .
......
...0 0 1 0 0 00 0 0 1 0 00 0 0 0 1 0
x +
10...000
u. (2-39)
Iz jednadzbe stanja (2-39) vidljivo je kako se zgodno formiraju ma-trice A i B. Prvi redak matrice A odgovara negativnim koeficijentimanazivnika prijenosne funkcije (2-31) u istom redoslijedu, vrijednostiispod glavne dijagonale jednake su 1, a svi ostali elementi matrice A sujednaki 0. Matrica B, koja je za sustav s jednim ulazom stupcani vektor,ima prvu vrijednost jednaku 1, a sve ostale jednake 0.
Za dobivanje izlazne jednadzbe sustava potrebno je iz prijenosnefunkcije (2-34) odrediti diferencijalnu jednadzbu:
y = b0z(m) + b1z(m1) + . . . + bm2z + bm1z + bmz. (2-40)
Uz opcenitu pretpostavku da je red brojnika za jedan manji od redanazivnika (m = n 1), dobiva se:
y = b0z(n1) + b1z(n2) + . . . + bm2z + bm1z + bmz. (2-41)
Zatim se uvrstavanjem jednadzbi (2-36) u diferencijalnu jednadzbu(2-41) dobiva:
y = b0x1 + b1x2 + . . . + bm2xn2 + bm1xn1 + bmxn, (2-42)
2.2. Kanonske realizacije sustava u prostoru stanja 41
iz cega slijedi izlazna jednadzba sustava u matricnom obliku:
y =[
b0 b1 . . . bm2 bm1 bm]
x + [0] u. (2-43)
U slucaju da je red brojnika za vise od jedanput manji od redanazivnika, odgovarajuci broj prvih koeficijenata retcanog vektora C bitce jednak 0.
Prema izlaznoj jednadzbi (2-43) slijedi da se retcani vektor C formiraod koeficijenata brojnika prijenosne funkcije (2-31) u istom redoslijedu,uz napomenu da na prva mjesta u retcani vektor C treba ubaciti broj nulakoji odgovara razlici redova nazivnika i brojnika umanjenoj za 1 (nm1). Matrica D je uvijek jednaka 0 za red brojnika manji od reda nazivnika(m < n).
Za slucaj da je red brojnika jednak redu nazivnika, pristupa se dijelje-nju dvaju polinoma, pri cemu se dobiva koeficijent brojnika uz najvisupotenciju s kao rezultat dijeljenja, a ostatak je prijenosna funkcija ko-joj je red brojnika strogo manji od reda nazivnika. Pri tome taj koefici-jent u izlaznoj jednadzbi prelazi u matricu D i oznacava direktan prijenosulaznog signala na izlaz. Ostatak dijeljenja, odnosno prijenosna funkcijau kojoj je sada m < n se prebacuje u prostor stanja prema prethodnonavedenim koracima.
Kao primjer neka je zadana prijenosna funkcija:
G (s) =Y (s)U (s)
=2s3 + 4s2 + 7s + 6s3 + 2s2 + 3s + 1
.
Dijeljenjem brojnika s nazivnikom dobije se:(2s3 + 4s2 + 7s + 6
):(s3 + 2s2 + 3s + 1
)= 2
2s3 4s2 6s 2s + 4
pa se prijenosna funkcija zapisuje u obliku:
G (s) =Y (s)U (s)
= 2 +s + 4
s3 + 2s2 + 3s + 1,
Slika 2.7. Upravljiva kanonska realizacija sustava u prostoru stanja.
koji daje sljedecu upravljivu realizaciju:
x =
2 3 11 0 00 1 0 x +
100 u,
y =[
0 1 4]
x + [2] u.
Iz jednadzbe stanja (2-39) i izlazne jednadzbe (2-43), te uzimajuci uobzir mogucnost direktnog prijenosa ulaznog signala na izlaz preko ko-eficijenta d0, moze se nacrtati blokovska shema upravljive kanonske rea-lizacije u prostoru stanja (slika 2.7).
Iz blokovskog prikaza na slici 2.7 vidljivo je zasto je ova kanonskarealizacija upravljiva. Ulazni signal u dovodi se na niz serijski vezanihintegratora, te na taj nacin ulazni signal utjece na svaku od varijabli stanjasustava, cime je sustav po definiciji upravljiv.
2.2. Kanonske realizacije sustava u prostoru stanja 42
Slika 2.8. Osmotriva kanonska realizacija sustava u prostoru stanja.
2.2.2. Osmotriva kanonska realizacijaOsmotriva kanonska realizacija varijablama stanja je opis sustava u kojemse garantira osmotrivost sustava. Sustav opisan prijenosnom funkcijom(2-31), uz opcenitu pretpostavku da je red brojnika za jedan manji odreda nazivnika (m = n1), moze se opisati u prostoru stanja u osmotrivojkanonskoj realizaciji sljedecim jednadzbama:
x =
a1 1 . . . 0 0 0a2 0 . . . 0 0 0...
.... . .
. . ....
...an2 0 . . . 0 1 0an1 0 . . . 0 0 1an 0 . . . 0 0 0
x +
b0b1...
bm2bm1bm
u, (2-44)
y =[
1 0 . . . 0 0 0]
x + [0] u. (2-45)
Blokovska shema osmotrive kanonske realizacije, uz mogucnost dire-ktnog prijenosa ulaznog signala na izlaz preko koeficijenta d0, prikazanaje na slici 2.8.
Iz blokovske sheme prikazane na slici 2.8 vidljivo je zasto je ova ka-nonska realizacija osmotriva. Poznavajuci trajektoriju izlaza y, lako se
dohvaca bilo koja od varijabli stanja sustava, cime je sustav po definicijiosmotriv.
U slucaju da je red brojnika jednak redu nazivnika (m = n) pristupase postupku dijeljenja polinoma brojnika s nazivnikom, pri cemu rezultatdijeljenja prelazi u matricu D, a ostatak je prijenosna funkcija za kojuvrijedi m = n 1. Npr. prijenosna funkcija iz poglavlja 2.2.1.:
G (s) =Y (s)U (s)
= 2 +s + 4
s3 + 2s2 + 3s + 1,
ima sljedecu osmotrivu realizaciju:
x =
2 1 03 0 11 0 0 x +
014 u,
y =[
1 0 0]
x + [2] u.
Za parove matrica upravljive kanonske realizacije Au, Bu, Cu, Du teosmotrive kanonske realizacije Ao, Bo, Co, Do vrijede sljedece relacijemedu matricama:
Ao = ATu ,Bo = CTu ,Co = BTu ,Do = Du,
(2-46)
te se one koriste za pretvorbu izmedu jednog oblika u drugi. Dovoljnoje, dakle, izvesti samo jednu realizaciju, a druga se lako dobije iz prvepomocu (2-46).
2.2.3. Dijagonalna (modalna) kanonska realizacijaPrijenosna funkcija sustava s jednim ulazom i jednim izlazom (2-31)moze se rastaviti na parcijalne razlomke. Pri rastavu na parcijalne ra-zlomke najjednostavniji slucaj se dobiva ako su svi polovi sustava realni
2.2. Kanonske realizacije sustava u prostoru stanja 43
i razliciti. U tom slucaju se prijenosna funkcija (2-31) moze zapisati u fa-ktoriziranom obliku, uz opcenitu pretpostavku da je red brojnika jednakredu nazivnika (m = n):
G (s) =Y (s)U (s)
=b0sn + b1sn1 + . . . + bn1s + bn
(s p1) (s p2) (s pn1) (s pn) , (2-47)
gdje su pi (i = 1, 2, . . . , n) su realni polovi sustava.Postupkom rastava na parcijalne razlomke dobije se:
G (s) =Y (s)U (s)
= b0 +c1
s p1 +c2
s p2 + . . . +cn
s pn , (2-48)
gdje su ci (i = 1, 2, . . . , n) koeficijenti rastava na parcijalne razlomke, kojise najjednostavnije mogu odrediti metodom rezidua:
ci = limspi
(s pi) b0sn + b1sn1 + . . . + bn1s + bn
(s p1) (s p2) (s pn1) (s pn) . (2-49)
Matlab ima ugradenu funkciju residue upravo za ovu svrhu.Postupak prebacivanja u prostor stanja sastoji se u tome da se svaki
dinamicki clan iz rastava (2-48) pojedinacno opise u prostoru stanja. U tusvrhu se iz (2-48) izrazava izlazna velicina i uvode supstitucije:
Y (s) = b0U (s) + c11
s p1 X1(s)U(s)
U (s) + c21
s p2 X2(s)U(s)
U (s) + . . .+ cn1
s pn Xn(s)U(s)
U (s) ,
(2-50)Y (s) = c1X1 (s) + c2X2 (s) + . . . + cnXn (s) + b0U (s) . (2-51)
Za pojedine varijable stanja vrijedi:
Xi (s)U (s)
=1
s pi . (2-52)
Prebacivanjem (2-52) u vremensko podrucje dobije se:
xi = pixi + u. (2-53)
Matricni oblik jednadzbi stanja (2-53) glasi:
x =
p1 0 . . . 0 00 p2 . . . 0 0...
.... . .
......
0 0 0 pn1 00 0 0 0 pn
x +
11...11
u. (2-54)
Izlazna jednadzba slijedi iz (2-51):
y =[
c1 c2 . . . cn1 cn]
x + [b0] u. (2-55)
Blokovska shema dijagonalne (modalne) kanonske realizacije sustavau prostoru stanja prikazana je na slici 2.9.
Iz blokovske sheme sa slike 2.9 vidljiv je utjecaj ulazne velicine una svaku od varijabli stanja, te isto tako