Embed Size (px)
DESCRIPTION
Evaluation of the SMAP Combined Radar-Radiometer Soil Moisture Algorithm. IGARSS 2011 Paper #3398. N. N. Das 1 D. Entekhabi 2 S. K. Chan 1 R. S. Dunbar 1 S. Kim 1 E. G. Njoku 1 J. C. Shi 3. - PowerPoint PPT Presentation
Citation preview

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
Evaluation of the SMAP Combined
Radar-Radiometer Soil Moisture Algorithm
1Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California 91109, USA2Massachusetts Institute of Technology, Cambridge, MA 02139, USA
3University of California, Santa Barbara, CA 93106, USA
IGARSS 2011Paper #3398
N. N. Das1
D. Entekhabi2
S. K. Chan1
R. S. Dunbar1
S. Kim1
E. G. Njoku1
J. C. Shi3

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
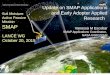
SMAP Measurements Approach
RadarFrequency: 1.26 GHz Polarizations: VV, HH, HV Resolution: 3 kmRelative Accuracy: 1.0 dB (HH ,VV), 1.5 dB (HV)
RadiometerFrequency: 1.41 GHz Polarizations: H, V, 3rd & 4th StokesResolution: 40 kmRelative Accuracy: 1.3 K
Shared AntennaConstant Incidence Angle: 40ºWide Swath: 1000 km
OrbitSun-Synchronous, 6 am/pm Orbit, 680 km
Overview of the SMAP Mission

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
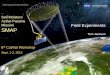
L-band Active/Passive Assessment
· Soil Moisture Retrieval Algorithms Build on Heritage of Microwave Modeling and Field Experiments
MacHydro’90, Monsoon’91, Washita92, Washita94, SGP97, SGP99, SMEX02, SMEX03, SMEX04, SMEX05, CLASIC, SMAPVEX08, CanEx10
· Radiometer - High Accuracy (Less Influenced by Roughness and Vegetation) but Coarser Resolution (40 km)
· Radar - High Spatial Resolution (1-3 km) but More Sensitive to Surface Roughness and Vegetation
Combined Radar-Radiometer Product ProvidesBlend of Measurements for Intermediate Resolutionand Intermediate Accuracy

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
Requirement Soil Moisture Freeze/Thaw
Resolution 10 km 3 km
Refresh Rate 3 days 2 days(1)
Accuracy 0.04 [cm3 cm-3] (2) 80% (2)
Duration 36 months
(1) North of 45°N Latitude(2) % volumetric water content, 1-sigma(3) % classification accuracy (binary: Freeze or Thaw)
SMAP Level 1 Science Requirements
ProductShort Name Description Data
ResolutionL2_SM_P Radiometer Soil Moisture 36 km
L2_SM_A Radar Soil Moisture 3 kmL2_SM_A/P Active-Passive Soil Moisture 9 kmL2_F/T_HiRes Daily Global Composite Freeze/Thaw State 1-3 kmL3_SM_P Daily Global Composite Radiometer Soil Moisture 36 kmL3_SM_A/P Daily Global Composite Active-Passive Soil Moisture 9 kmL4_SM Surface & Root Zone Soil Moisture 9 kmL4_C Carbon Net Ecosystem Exchange 1 km

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
Definitions and Data Products Flow
0 3 6 9 12 15 18 21 24 27 30 33 360369
121518212427303336
km
km
L1_S0_HiRes σ
0 360
36
km
km
0 9 18 27 360
9
18
27
36
km
kmMerge Algorithms
C
Mnm
nc = 1
nf = 144
nm = 16
C = Coarse (~36 km Radiometer)Mnm = Medium (~9 km Merged Product)F nf= Fine (~3 km Radar)
L1C_TB TB
L2_SM_AP
TB disaggregation
(Das et al., Preliminary ATBD) (TGARS, submitted)
Fnf

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
L2_SM_AP Radar-Radiometer TB Disaggregation Algorithm
Same evaluated at scale Mj:
jppjj
ppjpp
B
jB
MCMCM
CMC
CT
MT
p
p
Temporal Changes in TB and σpp are Related. Relationship Parameter β is Estimated Statistically at Radiometer C-Scale Using Successive Overpasses:
CCCCT ppBp
jppjjjB MMMMTp
Subtract Two Equations to Write:
DOY, 2002 TBh~4 km σvv ~800 m
176
178
182
183
186
187
188
189
R2 (Low: 0.65, High: 0.93) values between TBh and σvv
dBK
SMEX02

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
L2_SM_AP Radar-Radiometer Algorithm
Heterogeneity in Vegetation and Roughness Conditions Estimated by Sensitivities Γ in Radar HV Cross-Pol:
Cjpqjpp MM , Slope
TB( Mj ) is Used to Retrieve Soil Moisture at 9 km
TB-Disaggregation Algorithm is:
)]}()([
)]()([ {
)(
)(
CM
CM
CT
MT
pqjpq
ppjpp
B
jB
p
p
hvvvhh
hv
28
RVI
hvvvhh
hv
28
RVI
CppBT , Slope
Based on PALS Observations From: SGP99, SMEX02, CLASIC and SMAPVEX08

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
0 0.1 0.2 0.3 0.40
0.1
0.2
0.3
0.4
Average of Field Measurements [cm3/cm3]B
asel
ine
Alg
orith
m [c
m3 /c
m3 ]
RMSE: 0.033 [cm3/cm3]
0 0.1 0.2 0.3 0.40
0.1
0.2
0.3
0.4
Average of Field Measurements [cm3/cm3]
Min
imum
Per
form
ance
[cm3 /c
m3 ] RMSE: 0.055 [cm3/cm3]
Combined Airborne Data From: SGP99, SMEX02, CLASIC and SMAPVEX08
Active-Passive Algorithm Performance
Minimum Performance AlgorithmRMSE: 0.055 [cm3 cm-3]
Active-Passive AlgorithmRMSE: 0.033 [cm3 cm-3]

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
0 0.1 0.2 0.3 0.40
0.1
0.2
0.3
0.4
Average of Field Measurements [cm3/cm3]
Bas
elin
e w
ith n
o H
V ad
j. [c
m3 /c
m3 ]
RMSE: 0.043 [cm3/cm3]
The Role of Cross-Pol in Capturing Heterogeneity
0 0.1 0.2 0.3 0.40
0.1
0.2
0.3
0.4
Average of Field Measurements [cm3/cm3]
Bas
elin
e A
lgor
ithm
[cm
3 /cm
3 ]
RMSE: 0.033 [cm3/cm3]Active-Passive AlgorithmRMSE: 0.033 [cm3 cm-3]
Active-Passive Algorithm Without Cross-PolRMSE: 0.043 [cm3 cm-3]
0 0.1 0.2 0.3 0.40
0.1
0.2
0.3
0.4
Average of Field Measurements [cm3/cm3]
Min
imum
Per
form
ance
[cm3 /c
m3 ] RMSE: 0.055 [cm3/cm3]
Minimum Performance AlgorithmRMSE: 0.055 [cm3 cm-3]
0

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
VWC [kg/m2]
RM
SE [c
m3 /c
m3 ]
Baseline L2_SM_A/PL2_SM_A/P with no cross-pol adjustmentMinimum performance
Parameter Added Uncertainty (1 std.)Brightness Temperature TB 1.5 [K]
Vegetation Opacity (τ) 10%Soil Temprature 2 [K]
Single-Scattering Albedo (ω) 5%Roughness (h) 10%
Sand fraction (sf) 10%Clay fraction (cf) 10%
Study region selected from the CONUS domain.
Assessment of L2_SM_AP Algorithm Using SMAP Algorithm Testbed

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
Sample of L3_SM_APOutput from SMAP Algorithm Testbed
V/V
Global Composite Map of Soil Moisture for April 02

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
Summary
PALS data verifies that the assumption (linear TB-log[σ] relationship) holds well as the basis for the L2_SM_A/P algorithm
With current baseline approach, the algorithm meets the SMAP Level-1 requirements
Algorithm relies on radar co-pols and cross-pols
L2_SM_AP processor developed in SMAP Testbed

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
Optimize length of temporal window (balance between phenology and statistical robustness)
Develop and mature algorithm prior parameters database for Bayesian estimation
Develop and mature L2_SM_A/P error budget table
Work in Progress

National Aeronautics and Space Administration
Jet Propulsion LaboratoryCalifornia Institute of TechnologyPasadena, California
Acknowledgements
Andreas CollianderJet Propulsion Laboratory
Joel JohnsonOhio State University
NASA SMAP Project