-
Calculating the Surface Topography ofIntegrated Circuit Wafers
from SEM Images
Timothy P Ellison and Christopher J Taylor
Wolfson Image Analysis UnitDepartment of Medical BioPhysics
University of ManchesterManchester M19 3PT
The ability to make three-dimensional measurements ofsurface
topography is important to the control of quality in thefabrication
ofIC wafers. We describe a technique usingshapefrom shadingto
produce a dense depth map from ICs imaged inthe scanning electron
microscope. The method minimises errorterms to ensure the resultant
surface is everywhere continuousand accurately explains the
observed image intensities. Wedescribe how this method is extended
when stereo images areavailable and how the extra information in
stereo could be usedto derive properties of the reflectance
Junction.
A great deal of effort is expended by the manufacturers
ofintegrated circuits (ICs) in judging the quality andacceptability
of device interconnect metallization onintegrated circuit wafers or
dice. Typically they areinterested in measuring parameters such as
the height oftracks, passivation steps, contact windows and
cross-oversof metallization layers relative to the substrate, the
depthof pits in the substrate and the thickness of the
glassivationlayer. Due to the size of the structures
involved,components are normally tested non-destructively using
ascanning electron microscope (SEM). It is possible toextract some
of the required quantitative informationrelatively easily from SEM
images but heights relative tothe substrate are difficult to
measure. We are attemptingto produce accurate measurements of
three-dimensionaltopography from stereo images taken by SEM.
Animportant characteristic of the problem is the variability
inmaterial properties and in imaging conditions and theconsequent
difficulty in modelling the imaging process.
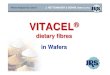
The SEM produces images that are highly magnifiedrepresentations
of the sample, with surface shading similarto that observed in
scenes illuminated by directional light(Figure 1). As a method of
extracting three-dimensionalinformation from such images, shape
from shading [1 ,2]offers the derivation of a dense depth map,
which isparticularly useful when trying to make
volumetricmeasurements. Other methods commonly adopted for
theextraction of three-dimensional information rely on beingable to
match features in a stereo pair of images (thecorrespondence
problem). Although it is possible toobtain stereo pairs of SEM
images, either by tilting themicroscope stage or by deflecting the
electron beam, thesurfaces of interest in this application are
sufficientlyfeatureless to make the approach unattractive.
Figure 1. SEM image of an integrated circuit
This paper describes our approach to recovering
heightinformation from SEM images of ICs. Our first objectivehas
been to exploit fully the information present in a singleimage.
This involves making assumptions about therelationship between
surface orientation and observedintensity, though it is possible to
obtain an approximationto this reflectance function by making use
of calibrationobjects. The iterative scheme we have adopted
convergesrapidly to to a reasonable estimate of the height map
whichit then adjusts directly, to achieve a least-squareexplanation
of the observed image intensities. In order toachieve this we have
developed a simple four-pass methodof generating a height map from
possibly inconsistent mapsof surface gradient. Our second objective
has been toexploit the additional information available from a
stereopair of images, using binocular shape from shading. Thescheme
developed for the monocular case has beenextended to deal with
stereo by casting the left and rightimage observations into a
Cyclopean co-ordinate frame inwhich a single height map is
constructed. This processrequires an initial estimate of the height
map, which weobtain using the monocular method. The
additionalinformation available in the binocular case can
potentiallyprovide more accurate estimates of surface
orientation
187
BMVC 1990 doi:10.5244/C.4.34
-
and can resolve ambiguities present in the monocular case.We
believe there is also the potential to recoverinformation about the
reflectance function though thiscannot yet be demonstrated.
PREVIOUS WORKIn general, existing algorithms for extracting the
shape ofan object using shape from shading rely on knowing
thereflectance properties of the object a priori (but see [ 3
])expressed as a reflectance function or map. Such a functionmakes
explicit the relationship between surfaceorientation and
brightness, encoding information aboutthe surface reflectance
properties and light-sourcedistribution. Most existing methods tend
to make thesimplifying assumption that the object exhibits
Lambertianproperties. This does not hold for SEM images.
The problem of obtaining the shape of an object from itsshading
pattern is fundamentally difficult because thereare two degrees of
freedom in surface orientation at eachpicture point but only one
brightness measurement, thuswe have one equation in two unknowns at
each point in theimage. The problem becomes tractable if a number
ofsimplifying assumptions are made concerning the objectbeing
reconstructed and the lighting and viewingconditions under which
the images were taken. Typicalassumptions include the image being
acquired underorthographic projection and that the underlying
surface iseverywhere continuous. Some methods have tended toimpose
unrealistic constraints on the resulting surfaceassuming, for
example, that it is smooth [ 4 ], locallyspherical [ 5 ] or
hyperbolic [ 6 ]; these lead to inaccuratereconstructions of the
surface. In particular shape fromshading methods that solely
penalise departure fromsmoothness will cause any non-planar surface
to incur apenalty and thus tend to produce results that are
flatterthan the actual surface. More recently the notion of
theresultant surface being integrable* has become acceptedas a
sufficient condition [ 8 ]. Most methods work directlywith surface
gradients, then recover height in a separatestep [ 4 ] though
methods that recover height directly havebeen reported recently [9
,2] .
Although most papers on shape from shading only addressthe
monocular case [ 4,10,2 ] there has been some workpublished on
obtaining shape from shading using stereoimages, although they have
tended to be concerned withaugmenting the sparse height information
available bymatching stereo pairs [ 11,12 ], by using the
extrainformation available as shading to "fill in the gaps"
offeature based stereo - requiring the correspondenceproblem to be
solved.
MONOCULAR SHAPE FROM SHADINGWe have derived an iterative scheme
for solving the shapefrom shading problem whilst enforcing the
integrability ofthe recovered surface by working directly with the
heightmap. The method requires a good initial estimate of theheight
map, which we obtain using a rapidly converging butless accurate
technique.
Iterative Recovery of Height Map
We use the calculus of variations [ 15 ] to derive
Eulerequations that provide the necessary conditions for
theminimisation of several cost functions. Given the imageE(x,y)
and a reflectance function R(p,q), where p and q arethe surface
gradient in x and y respectively. We areinterested in finding the
surface z(x,y) which minimises,
jjjE(x,y)-R(p,q)fdxdy
the error, integrated over the image, between the
observedintensities and those predicted using the reflectance
map.We could minimise this integral in p and q but the resultwould
not necessarily correspond to a continuous surface.Thus we need to
find the best-fit surface z which haspartial derivatives z* and Zy
that are closest to matching thecomputed components of the gradient
(p and q) byminimising
\l (zz-pf + (zy-qfdxdyCombining this integrability constraint
with the intensityconstraint, we obtain
(zy-qY)dxdy
where \l is a Lagrangian multiplier. Finding the minimumof this
integral for values of p and q is a simple calculusproblem (not
involving the calculus of variations) sincethere are no partial
derivatives of p and q in the function.Differentiating with respect
top and q and setting equal tozero results in
-^R(p,q) (1)
q = zy + j(E(x,y)-R(p,q))-^R(p,q) (2)
To find the minimum with respect to z we see that z doesnot
appear directly in (E(x, y) - R(p, q)), so we just need
tominimise
This expression is a functional of the form
F(z, Zx, Zy)dx6y, and therefore has a minimum that
satisfies the corresponding Euler equation,
where
hence,
is a necessary condition for a minimum in the
functional.Rearranging we get
t ie. the surface is twice differentiable everywhere188
+
dx dy
-
where
dx2 dy2
We can to derive an iterative scheme to solve equation (3),by
using finite-difference methods to approximate thederivatives. The
discrete approximation to V2 (theLaplacian operator) is
thus,
where € is the inter-pixel spacing, and the local average jy
is given by
fig = -jtfig+l + fi+lg + fig-l + fi-lg)
We can thus rewrite equation (3) in its discrete form as
4 ,_—\zij-zij) = Px + %
Making zij the subject of the formula results in theiterative
scheme,
where
and
^ - P i - i j ) and v(i/; = -(
-
Which we can rewrite as -m,y) + mp{x-m,y)
where fu = +
is the vertical local average of f,j.
Now, taking equation (7) as the example, rearranging
andsubstituting pyy gives,
and therefore
Using the discrete approximation,
We have the iterative scheme,
where2X
Pij = -yiPij+l + Pij-l) and
(9)
1
are the vertical average of/? and an estimate of the
crossderivative (times €2) of q respectively.
Equation (8) yields a similar iterative scheme for q.
This method does not enforce integrability of the
resultantsurface, but merely treats it as an error term to
beminimised together with the intensity difference. Itsability to
start from a poor approximation to the surfaceand its rapid
convergence make it suitable for deriving aninitial surface from
which to start iterating the exactscheme.
Full Monocular Method
We have combined the two methods described above toproduce a
shape from shading scheme which convergesrapidly to an accurate
estimate of height starting from a setof/?, q and z maps that do
not represent a surface near thecorrect answer.
We use the method of equation (9) to build/? and q maps inwhich
departures from integrability are penalised. Oncethis method has
converged we cast the gradient values ontoa coherent physical
surface by scanning through thegradient maps from each comer of the
reconstructedregion, at each point producing a surface height that
bestexplains the local gradients whilst imposing
integrability.Using the notation/? and q as before, the height at a
point(x,y) is given in terms of the scan direction by,
;y-n)\V 8
zmn(x,y-n) + nq(x,y-8
z(x, y) = zn(x,y) + z.u(x,y) + z1_,(r,.y) + z_n(x,y)
where m = ± 1 , n = ± 1 denote the direction of the scan in*and
y respectively.Once the initial height map has been constructed
wecontinue the method of equation (9), except that now
werecalculate the/? and q maps from z at every iteration. Thiswill
not converge to the correct solution but ensures thatthe solution
maintains convergence during the initialstages of introducing
feedback from the height map. Oncestable convergence has been
re-established the method ofequations (4), (5) and (6) is applied.
In practice, we do notmake this final change instantaneously but
rather take aweighted combination of the two methods to achieve
agraceful transition.
BINOCULAR SHAPE FROM SHADINGWe obtain shape from binocular
shading from stereoimages by building the height and orientation
maps withreference to a global co-ordinate system (GCS) basedupon
the Cyclopean view. The monocular shape fromshading algorithm is
extended to use the shadinginformation available in both images.
The extension of thealgorithm involves transforming image points
from theco-ordinate systems of the left and right eye views (LCSand
RCS respectively) to the GCS, using information fromthe height map.
The nature of the iteration is such that thecorrespondence improves
as the height map approachesthe correct solution. The error
function is easily extendedto take account of the extra information
available.
If we make the simplifying assumption of obliqueprojection, then
the mapping from GCS to LCS and RCSbecomes a simple rotation. Using
no subscript to denotethe GCS, the subscript "IT for the LCS and
the subscript"R" for the RCS and extending the scheme
describedabove,
A similar equation holds for q; the equation in z
remainsunchanged.As with the exact monocular method the scheme
requiresa reasonably good starting approximation. We obtain thisby
computing an initial monocular solution.
RESULTS
Monocular MethodThe monocular method has been applied to
bothsynthesised images and real SEM images. In both
casesmeasurements made from calibration objects, viewed inthe
SEM.were used to estimate the reflectance function.Cylinders and
spheres were used as calibration objectssince surface orientation
could be inferred very simply
190
-
Figure 2. Synthesized SEM image of a cylinder Figure 5. Rendered
surface reconstructed bybinocular method
Figure 3. Height profile computed from Figure 2 Figure 4. Height
profile computed from Figure 1
from radial position in the projected image. The effects ofnoise
were minimised by fitting polynomial surfacesthrough the measured
data. Synthetic images of cylinderswere generated from the
reflectance function and used totest the methodology. Figure 2
shows one such test imageof a 64 pixel radius cylinder. Figure 3
shows the calculatedheight profile, at the position indicated in
Figure 2, after atotal of 120 iterations (Phase 1 = 60, Phase
2=60), startingfrom a plane surface. The solution was stable. The
dashedline shows a least-square circle fitted to the
data,indicating a calculated diameter of 65 pixels.
Figure 4 shows a height profile of the surfacereconstructed from
the IC image in Figure 1 using thesame procedure as above; again
the solution was stable.No absolute height data is available for
comparison but theprofile appears qualitatively correct and
quantitativelyplausible.
191
Binocular MethodThe binocular method has only been applied to
syntheticdata so far but we hope to present results obtained for
realSEM images, at BMVC 90. Synthetic images of cylinderswere
generated for ± 3° beam tilt. The monocularmethod was used to
provide an initial estimate of theheight map as described above.
The binocular methodconverged to a stable solution after about 20
iterations. Arendered illustration of the calculated surface is
shown inFigure 5.
DISCUSSIONWe have shown that it is possible to reconstruct
plausibleheight maps from monocular SEM images of ICs, using
amethod that converges in tens of iterations starting from aplanar
surface. We have shown, using synthetic data, thatthe method can be
successfully extended to deal with
-
binocular images. We are currently undertaking anexperimental
determination of the accuracy of bothmethods, using real SEM images
of calibration objects; theresults with synthetic images indicate
that, given a goodestimate of the reflectance map, it is possible
to achieveaccuracies of a few per cent in height measurement.
Wehave pointed out that it is not necessarily practical toobtain a
prior estimate of the reflectance map and weintend to further
investigate the possibility of using theredundancy present in
binocular shaded images to recoverthe reflectance map on-line. Once
a reasonably stablesolution for the height map has been reached,
using aninitial approximation to the reflectance map, we intend
tomodify the iterative scheme to allow R(p,q) to be updatedto
improve agreement between observed and predictedintensities.
Stability will be maintained by applying a verystrong smoothness
constraint in the reflectance map.
Further improvements in speed may be obtainable usingmulti-grid
methods though previous attempts to applythese techniques to shape
from shading have achieved onlylimited success [ 13 ].
Although many of the surfaces of interest in thisapplication are
smoothly varying there are also localisedtopographical features
which could be used forfeature-based stereo and it seems likely
that a practicalscheme for extracting height from SEM images would
alsoneed to incorporate such methods.
ACKNOWLEDGEMENTSTim Ellison holds a Total Technology studentship
fundedby SERC and Leica Cambridge Ltd.
REFERENCES
1 . Horn, B. K. P. Robot Vision MIT Press, 1986
2 . Horn, B. K. P. and Brooks, M. J. Shape fromShading MIT
Press, 1989
3 . Brooks, M. J. and Horn, B. K. P. "Shape andSource from
Shading" Proc. of the Intern. Joint Conf.on Artificial
Intelligence, Los Angeles, California,18-23 August 1985, pp.
932-936
4. Ikeuchi, K. and Horn, B. K. P. "Numerical Shapefrom Shading
and Occluding Boundaries" ArtificialIntelligence, Vol. 17, Nos.
1-3, August 1981, pp.141-184
5 . Pentland, A. P. "Local Shading Analysis" IEEEPAMI, Vol. 6,
No. 2, March 1984, pp. 170-187
6. Ferrie, F. P. and Levine, M. D. "Where and WhyLocal Shading
Analysis Works" IEEE PAMI, Vol.11, No. 2, February 1989, pp.
198-206
7 . Boyde, A. and Howell, P. G. T. "Taking, Presentingand
Treating Stereo Data from the SEM. II."Scanning/1977, Part I,
Chicago, Illinois, March 1977pp. 571-580
8. Frankot, R. T. and Chellapa, R. "A Method forEnforcing
Integrability in Shape from ShadingAlgorithms" IEEE PAMI, Vol. 10,
No. 4, 1988, pp.439-451
9 . Harris, J. J. "A New Approach to SurfaceReconstruction : The
Coupled Depth/Slope Model"ICCV, London, June 8-11,1987, pp.
277-283
10 . Horn, B. K. P. and Brooks, M. J. "The VariationApproach to
Shape from Shading" MIT AI Lab.Memo 813, March 1985
11. Ikeuchi, K. "Constructing a Depth map fromImages" AI Memo
No. 744, MIT AI Lab.,Cambridge, MA, 1983
12 . Grimson, W. E. L. "Binocular Shading and VisualSurface
Reconstruction" Computer Vision, Graphicsand Image Processing, Vol.
28, 1984, pp 19-43
13 . Ron, G. and Peleg, S. "Multiresolution Shape fromShading",
IEEE PAMI, 1989, pp.350-355
14 . Horn, B. K. P."Height and Gradient from Shading"MIT AI
Laboratory Memo AI-M-1105, May 1989
15 . Courant, R. and Hilbert, D. Methods ofMathematical Physics
Volume 1 IntersciencePublishers Ltd., London, 1953
16 . Lee, D. "A Provably Convergent Algorithm forShape from
Shading" Proceedings CVPR, June 1988,Ann Arbour, MI, pp. 478-485,
1988
192