Embed Size (px)
Citation preview

47
25th Working Meeting
of IFToMM Permanent Commission
for Standardization of Terminology on MMS,
Saint-Petersburg, Russia, June 23 – 29, 2014
ABOUT PREPARATION OF NEW SECTION OF IFToMM
TERMINOLOGY ON MMS: CHAPTER 16 COMPLIANT
MECHANISMS
Nenad T. Pavlovic, Dr.-Ing., University of Nis, Faculty of Mechanical Engineering, Serbia,
Antonius J. Klein Breteler, Prof. Dr., Delft University of Technology, the Netherlands
Lena Centner, Dr., Technische Universitat Ilmenau, Germany, [email protected]
Victor E. Starzhinsky, Prof., Dr. Sci., Metal-Polymer Research Institute of National
Academy of Sciences of Belarus, Gomel, [email protected]
ABSTRACT
The order and stages of preparation of the new section of IFToMM Terminology – Chapter
16 Compliant mechanisms – are considered.
Key words: compliance, compliant mechanism, stiffness, stages of development.
A compliant mechanism is a mechanism that gains the whole or a part of its mobility rather
thanks to relative flexibility of its elements than due to the rigid-body joints only. The basic
property of this sort of mechanisms is compliance which according to the definition of the
Prof. G. Boegesack is the ability of a body or a structure to exhibit a distinct deformation
due to the action of external forces. Compliance (in other words – flexibility) is a measure
inverse to of rigidity. Rigidity represents a measure of the ability of a body or a structure to
resist deformation exerted by the external forces.
Without a pretention on a detailed presentation of the problem under discussion, we are
going to mention here the principal stages preceding the appearance of the given section of
terminology and familiarize you with available information.
We believe that the first mention about the compliant mechanisms appeared in the beginning
of the nineties of the XX century in the papers by Larry L. Howeell et al. published in the
journal “Machine Elements and Machine Dynamics” (see the list of references). In 1994-

48
2011 a series of publications appeared in the Journal “Mechanism and Machine Theory”, as
well as in the proceedings of different International Workshops (TU Ilmenau, 2002, 2005,
2011). The International Symposiums on Compliant Mechanisms were held in Bangalore,
India (2007) and Delft University of Technology, Delft, the Netherlands (2011). The first
who proposed to include the terminology of compliant mechanisms in IFToMM
Terminology was Prof. G. Boegelsack (TU Ilmenau, Germany). He proposed in 2010, as the
initial version 12 terms with definitions in German and English. Then, in 2011, Prof. Klein
Breteler (TU Delft, the Netherlands) has proposed to the members of IFToMM Permanent
Commission “Standardization of Terminology” to prepare for the 24th Working Meeting in
Ilmenau the initial informative material for discussion, wherefore all IFToMM PC A
members have received the information about available results, topical issues (presence of
information resources, necessity to organize subcommission, participation in preparation of
materials for discussion), presence of information sources (see the list of references).
The initial presentation of terminology on compliant mechanisms was stated by the new
invited IFToMM PC A member of Commission Dr.-Ing. Nenad T. Pavlovic (University of
Nis, Serbia). Co-reporter Dr. Center (TU Ilmenau, Germany) has presented the report too.
For discussion at 25th working meeting the updated package of terms “Compliant
mechanisms” with definitions is presented.
The volume of presentation is 30 units with commentaries and suggestions concerning as
refinement, elimination or paddition of the new terms. Prof. V.E. Starzhinsky has fulfilled
the Russian translation. The list of information sources barrowed from the paper by Nenad
T. Pavlovic and Nenad D. Pavlovic “Modeling of a Compliant Scott-Russell Mechanism
with Small Length Flexural Pivots” and from Prof. Klein Breteler letter from 17.10.2011 to
the PC A members are given [1-16].
Authors see proper to supplement the paper by drawings of flexible elements from the
L.L.Howell Handbook [17] (see Appendix 2).
REFERENCES
1. Howell L.L. Compliant Mechanisms. – New York: John Wiley &Sons, Inc., 2001.
2. Pavlović N.T., Christen G. Experimental Research of The Compliant Four-Bar Linkage
for Rectilinear Guiding, In: Proc. of 47. Internationales Wissentschaftliches Kolloquium,
Tagungsband, TU Ilmenau. – 2002. – P. 320-321.
3. Pavlović N.T., Pavlović N.D. Improving of Mechanical Efficiency of Compliant
Mechanisms, In: Proc. of 50. Internationales wissenschaftliches Kolloquium TU Ilmenau,
Tagungsband (CD-ROM), TU Ilmenau. – 2005. – P. 379-380.
4. Pavlović N.D., Pavlović N.T. Rastpolbahn der nachgiebigen Mechanismen, In: Proc. of
50. Internationales wissenschaftliches Kolloquium TU Ilmenau, Tagungsband (CD-ROM),
TU Ilmenau. – 2005. – P. 381-382.

49
5. Pavlović N.T., Pavlović N.D. Compliant Mechanism Design for Realizing of Axial Link
Translation, In: Mechanism and Machine Theory. – Elsevier, 2009. – P. 1082-1091.
6. Howell L.L., Midha A., Murphy M.D. Dimensional Synthesis of Compliant Constant-
Force Slider Mechanisms, In: Machine Elements and Machine Dynamics (1994), ASME,
DE-Vol. 71. – P. 509-515.
7. Howell L.L., Midha A. The Development of Force-Deflection Relationships for
Compliant Mechanisms, Machine Elements and Machine Dynamics (1994), ASME, DE-
Vol. 71. – P. 501-508.
8. Choi S.-B., Cheong C.-C. Thompson B.S. et al. Vibration Control of Flexible Linkage
Mechanisms Using Piezoelectric Films, Mechanism and Machine Theory. – Elsevier, 1994.
– P. 535-546.
9. Pavlović T.N., Pavlović D.N., Milošević M. Design of Compliant Slider Crank
Mechanism, In: Proceedings of the 56th International Scientific Colloquium "Innovation in
Mechanical Engineering – Shaping the Future", Ilmenau University of Technology,
Germany, 2011.
10. Tanik E., Parlaktas V. A new type of compliant spatial four-bar (RSSR) mechanism, In:
Mechanism and Machine Theory. – Elsevier, 2011. – P. 593-606.
11. Midha A., Howell L.L., Norton W. Limit positions of compliant mechanism using the
pseudo-rigid-body model concept, In: Mechanism and Machine Theory. – Elsevier, 2000. –
No.1. – P. 99-115.
12. Pavlović N.T., Pavlović N.D. Mobility of the Compliant Joints and Compliant
Mechanisms, Theoretical and Applied Mechanics. – Belgrade, 2005. – No. 4. – P. 341-357.
13. Larry L. Howell Compliant Mechanisms. – Wiley & Sons, 2001. – 480 p.
14. http://compliantmechanisms.byu.edu/
15. http://compliantmechanisms.3me.tudelft.nl/
16. http://mechanical-sciences.net
17. Handbook of Compliant Mechanisms // Editor(s): Larry L. Howell, Spencer P. Magleby,
Brian M. Olsen. – John Wiley & Sons Ltd, 2013. – 342 p.

50
Saint-Petersburg. Excursion to Pushkino. Catherine Palace Hall.
Bíros’ family: Eva, Anna, Istvan

51
25th Working Meeting
of IFToMM Permanent Commission
for Standardization of Terminology on MMS,
Saint-Petersburg, Russia, June 23 – 29, 2014
MECHATRONICS AND ROBOTICS – INTERRELATIONS
OF NOTIONS: POINT OF VIEW
OF RUSSIAN ENCYCLOPAEDIA
Yuri V. Poduraev, Prof., Dr. Sci., Moscow State Technical University (Moscow, Russia),
Eugeni V. Shalobaev, Prof., Saint-Petersburg National Research University of Information
Technologies Mechanics and Optics (St. Petersburg, Russia) [email protected]
ABSTRACT
The phasses of robotics development as well as its classification on functional and structural
groups are considered. Interrelations of notions in the sections of MMS – Mechatronics and
Robotics have been analyzed.
Key words: robotics, mechatronics, functional group, structural group, robot control system.
Robotics is a multidisciplinary field of science and technology, which studies the
development and application of robots and robotic systems for assisting human labour
activities and intensification of manufacturing.
In scientific and engineering literature the term "robot" depicts an automatic machine which
replaces human operation with objects of the physical world. Etymologically the term
"robot" is close to Slavic word "Rabochi" («Рабочий» – a worker, labour), "Rab" («Раб» –
slave). The word "Robot" was introduced by a Сzech writer K. Chapek in his play "R.U.R"
published in 1921. The term "Robotics" was introduced by a Polish writer I. Asimov in his
science fiction story "Liar!" in 1941. History of robotics starting from ancient times and
Middle Ages is full of outstanding ideas and inventions from scientists and engineers from
all over the world.
Notably, in the 21st century, robotics has turned into a challenging field defining the
direction of the global technological transformation. Hence, the worldwide quantity of
robots has shown a steady growth, accounting to hundreds of thousands machines. It is
possible to distinguish three phases of robotics developmend.

52
The first phase – "robot replacing a man" is especially significant for automation of
tiresome, hard and dangerous for human health operations.
The second phase of robotics – "robot is better than a man" implies significantly better
performance of operations and the tasks performed by a robot (or a group of robots) if
compared to human performance (e.g. accuracy, speed of motion, etc). It is specifically
important for industrial manufacture performing machining operations (welding,
assembling, painting, etc). In this connection, it is clear that robots displace human labour
from certain type of activities, sometimes causing social problems.
The modern (third) phase of robotics consists in development of essentially new generation
of autonomous robotic technologies in which a man only supervises robot task on a higher
level of system control. For instance, these can be robotic micro- and nano- manipulations,
navigation inside the biological systems, operations in space or underwater autonomous
exploration. Consequently, the modern phase of robotics development makes it practically
relevant to discuss the philosophical and ethical questions on human and robot interrelation,
raised by science fiction previously.
Generally, we can define the classification features of a robot using two groups: functional
and structural. According to International Federation of Robotics, the functional group
includes industrial, mobile, service, domestic, biomedical, space and humanoid robots.
Humanoid is a human-like creature, with the appearance recalling a man.
The types of robots mentioned above are used in various environments (hazardous,
underwater, radioactive, etc) as well as in conventional industrial activities. For example,
industrial robots have been widely used in automotive, machining, electronic and other
branches of industry since 1960's. The mobile robots actively developed during the last
decade, are used more extensively for nuclear plants and pipelines maintenance, for
accomplishment of inspection, military and security tasks. Service, domestic and medical
robotics are new and promising fields of research and development that attract a significant
international attention.
Robotics is a multidisciplinary area consolidating knowledge of several previously
independent fields of science and technology. Challenge for new higher quality robotic
systems requires functional, structural and physical integration of devices having different
physical modalities (mechanical, microelectronic, computational) in a single machine using
the principles of Mechatronics and mathematics and computer-based modelling.
Structural classification of robots is based on the type of control systems, actuators, as well
as the tools and sensory systems. Robots are classified as teleoperated (teleported), semi-
autonomous and autonomously controlled depending on the role of the human operator in
the control loop. Autonomous robots can be pre-programmed, adaptive or with intelligent
control. These three types of control define three generations of robots. The first generation
of robots implement a pre-programmed position point-to-point and contour control which
cannot be modified on-line. Adaptive control systems enable automatic modification of
control parameters on-line for adapting to a changing state of the robot and its environment.
Intelligent control systems imply systematic knowledge analysis and are based on artificial

53
neural networks, fuzzy logic, expert systems and content-addressable memory technology.
The algorithms and control programme is automatically formed by the artificial neural
network during learning and imitating learning processes in biological neural networks.
In the mechanical design of the robots it is generally assumed to distinguish between serial,
parallel and hybrid kinematic configurations. Robot manipulators with serial kinematics are
classified based on their workspace configuration. Frequently used serial manipulators'
workspace configurations can be defined by the Cartesian, cylindrical, spherical and
anthropomorphic coordinate systems. Robot drives, which include electronic power
amplifiers and actuators (electric, hydraulic, pneumatic, etc), create the control forces and
torques in the robot joints, required to perform the desired motion. The sensory systems of
the robots collect, analyze and transfer information about the robots (position, velocity,
acceleration) and environments (computer vision, tactile, force/torque measurements, range
sensors) state of the robot control system.
REFERENCES
1. Робототехника: История и перспективы / И.М. Макаров, Ю.И. Топчеев. – 2003.
(Robotics: history and perspectives / I. M. Makarov, Yu.I. Topcheev. – 2003.)
2. Попов Е.П., Верещагин А.Ф., Зенкевич С.Л. Манипуляционные роботы. Динамика
и алгоритмы. – М., 1978. (Popov E.P., Vereshchagin A.F., Zenkevich S.L.
Manipulation robots. Dynamics and algorithms. – M., 1978.)
3. Юревич Е.И. Робототехника. – СПб, 2001 (Yurevich E.I. Robotics. – SPb, 2001)
4. Подураев Ю.В. Мехатроника: основы, методы, применение. – М., 2007. (Poduraev
Yu.V. Mechatronics: principles, techniques, application. – М., 2007).
5. Справочник по промышленной робототехнике / Под ред. Ш. Нофа. – 1989.
(Handbook on industrial robotics / Ed. Sh. Nof. – 1989).
6. Медведев В.С., Лесков А.Г., Ющенко А.С. Системы управления манипуляционных
роботов. – М.: 1978. (Medvedev V. S., Leskov A.G., Yushchenko A.S. Management
systems of handling robots. – М.: 1978).
7. Дистанционно-управляемые роботы и манипуляторы / Под ред. В.С.Кулешова. –
М.: 1986. (Remote-controlled robots and manipulators / Ed. V.S. Kuleshov. – M.:
1986).
8. Каляев И.А., Лохин В.М., Макаров И.М. Интеллектуальные роботы: учебное
пособие для вузов / Под ред. Е.И. Юревича. – М.: 2008. (Kalyaev I.A., Lokhin V.M.,
Makarov I.M. Intelligent robots: a training manual for high schools / Ed. E.I. Yurevich.
– М.: 2008).

54
Saint-Petersburg. Pushkino. Garden near Catherine Palace.
Left to right: Prof. I. Bíro, Anna Bíro, Eva Bíro, Prof. V. Starzhinsky,
Prof. E. Shalobaev, Dr. S. Shil’ko

55
25th Working Meeting
of IFToMM Permanent Commission
for Standardization of Terminology on MMS,
Saint-Petersburg, Russia, June 23 – 29, 2014
MODERN MECHANICS AS A BASIC OF MECHATRONICS
Evgenii V. Shalobaev, Prof., St.-Petersburg National Research University of Information
Technologies, Mechanics and Optics, Russia, [email protected]
Serge V. Shil'ko, Dr., V.A. Belyi Metal-Polymer Research Institute of NASB (MPRI of
NASB), Gomel, Belarus, [email protected]
ABSTRACT
It is set for the fact in the paper that mechanics has a range of peculiarities which we should
take into account at designing mechatronic systems. By now the theoretical basics of
mechatronics have been formed and they include the basic terminology, design method,
subject of domain, technologies, interrelation with the bordering fields of science and
engineering. The scientific-organizational and interpretive-communication problems are
discussed.
Key words: theory of mechanisms and machines, miniaturization, mechatronics, quasi-
mechatronic objects, adaptive mechanics, adaptronics, logistics, autonics, avionics,
translator.
One of the basic discipline in the field of Mechanics – Theory of mechanisms and machines
has experienced its first renaissance owing to the development of robotics in the 20th
century
[1]. Another surge of interest to mechanics was observed in the 80s in connection with
miniaturization of electronic devices [2]. This has furnished a possibility to build-in
electronic components into the mechanical (electromechanical) base for PC-aided control of
motion. In confirmation of the assertion of the theory, it is in the junctions of sciences in the
bordering areas of various disciplines where new discoveries occur. The idea to unite
incompatible (at first glance) components has been realized as a new sphere of science and
engineering. Its name is mechatronics that joins three notions in one and is closely related
with TMM.
In the recent quarter of the century mechatronics has formulated its theoretical foundations

56
[3], including basic terminology, design procedures, subject area, technologies, and the
relationship with the bordering scientific and engineering domains. In the source [4], among
the publications where theoretical concepts of mechatronics are considered, the following
ones [5-7] are referred to.
The works dealing with terminology [8-11] have accurately specified the very definition of
mechatronics and have created the hierarchy of mechatronic objects [12]. Such notions as a
module, machine [2] and a complex [13, 14] have been identified and a novel scaled
approach has been introduced to the concept of mechatronics. Mechatronics, microsystems
and nanoengineering are viewed today as differently scaled mechatronic levels [15] which
expand much of its subject area to where the mechatronic approach is treated as a systematic
procedure with a parallel design of the objects.
A procedure enabling the use of techniques for creating mechatronic objects for the systems
that are not canonically mechatronic ones but can be classified as mechatronized (the
systems with mechatronic elements [16]) or quasi-mechatronic objects.
The mechatronic and quasi-mechatronic objects can be united into a single mechatronic
class [17] which makes possible to elevate the quality of quasi-mechatronic objects
(author’s offer of the given paper).
The mechatronic domain which was previously based on merely electromechanics is
expanded via hydro and pneumomechanics and the like areas.
In this connection we witness the appearance of new terms that interrelate mechatronics
with aircraft industry (avionics) and automobile production (autonics, autotronics),
optimization of motion of a group of objects (logistics) and so on. Prof. Klein-Breteler (the
Netherlands) [18] shares the point of view of the author of these lines.
It is to be noted that mechanics occupies a specific place in mechatronics. For instance, in
Lithuania they have included the tutorial on adaptive mechanics in the mechatronic program
[19]. This approach is justified since the adaptive mechanics describes a unified complex
relationship between the dynamic effects, energy transformations, mechanics of the variable
structures, as well as the parameters and devices thereof. Adaptive mechanics has developed
independently but naturally enriching the notion of adaptronics accepted as a general term
for the internationally acknowledged trends like smart materials, smart structures,
intellectual systems and other [20]. This is because the mechatronic systems of a higher rank
are related to the intellectual ones. In this connection, the term adaptonics requires a
thorough substantiation.
Speaking about mechanics as the base for mechatronics, one should remember that the role
of the common mechanics is gradually diminishing. This is especially evident on the
example of the memory-storage devices where the rotating parts are discarded first of all
and substituted by the flash memory despite the fact that the flash memory does not furnish
100% reliability in contrast to the laser discs. Notice that the contact groups are gaining
force, e.g., the magnetically operated reed switches [21, 22] based on a symbiosis of
mechanical elements and electromagnetic effects. Besides, the mechanisms using the
piezoeffects are of no less interest [23].

57
It is important to underline that mechatronics does not substitute the traditional mechanics
but supplements and impact its further development.
The concept on the expansion of the subject area adopted by the IFToMM [24] in 2000 lies
in the base of renaming TMM into the MMS [25].
The development of mechatronics has lead to misunderstanding in the scientific and
organization spheres. Since mechatronics is triunique, there arose a competition of views
between the scientists united into International communities as far back as 35-45 years ago
who adhered to the prevailing then sharing of scientific knowledge.
In our case, this is the Federation dealing with the progress of sciences about machines and
mechanisms (IFToMM) and the Federation of the automatic control (IFAC) which includes
the profile Committees for mechatronics, as well as commissions and subcommissions on
mechatronics. To exclude nonconstructive competition it is necessary to use the methods of
mechatronic approaches, i.e., the efforts of various specialists should be united as far as the
object in question is inhomogeneous in their essence and difficulty compatible.
Of great importance was the decision to impact cooperation and mutual understanding
through the creation of International translators [26, 27]. They are especially helpful in
compiling summaries of papers and in optimal choice of the research works in one or
several scientific field since the focus is often placed on the investigations in the allied
areas. Solution of this problem alleviates estimation of the work of scientists proceeding
from the citation index. The general results of named activities will be seen in a complete
and objective acquaintance with the developments and achievements of the colleagues from
different countries.
Summarizing the above, it should be emphasized that the problems related to the
development of modern mechanics, including mechatronics, can be successfully solved by
determination of both purely scientific and organizational and translation-communicative
tasks.
REFERENCES
1. Минков К. Робототехника – ренессанс теории механизмов и машин // Материалы
третьей Международной Школы: Применение механики в робототехнике и новых
материалах. – Варна: Изд-во Болг. АН, 1988. – С. 42-47. (Minkov K. Robotics –
Rennaisance of Theory of Mechanisms and Machines / Proceedings of the 3rd
International
Scool “Applied of Mechanics in Robotics and New Materials”. – Varna: Publishing House
of Bulgarian Academy of Science. – 1988. – P. 42-47).
2. Шалобаев Е.В. Фундаментальные и прикладные проблемы развития мехатроники //
Сборник: Современные технологии. / Под ред. С.А. Козлова. – Санкт-Петербург:
СПбГИТМО (ТУ), 2001. – С. 46-67. (Shalobaev E.V. Theoretical and Applied Questions
of Mechatronics Development // Proceedings: Modern Technologies / Edited by
S.A. Kozlov. – Saint-Petersburg: IТМО University, 2000. – P. 46-67).

58
3. Шалобаев Е.В., Толочка Р.-Т. Терминологические аспекты современной
мехатроники // Фундаментальные и прикладные проблемы техники и технологий. –
2013. – № 5. – С.122-132. (Shalobaev E.V., Tolocka R.-T. Terminological Aspects of
Modern Mechatronics // Fundamental and Applied Problems of Engineering and
Technologies. – 2013. – No 5. – P. 122-132.)
4. Образовательная, научная и прикладная составляющие мехатроники /
Ю.С.Смирнов, Е.В. Юрасова, Д.А. Кацай, И.С. Никитин // Вестник Южно-Уральского
государственного университета. Серия: Компьютерныетехнологии, управление,
радиоэлектроника. – 2014. – Т.14, Вып.№1. – С.81-88. (Educational, Scientific and
Applied Components of Mechatronics. E.V. Smirnov [et al.] // Bulletin of South Uralian
State University. Series: PC-Technologies, Management, Radioelectronics. – 2014. –
Vol. 14, No 1. – P. 81-88).
5. Теряев Е.Д., Филимонов Н.Б., Петрин К.В. Мехатроника как компьютерная
парадигма развития технической кибернетики // Мехатроника, автоматизация,
управление. – 2009. – № 6. – С. 2-10. (Teryaev E.D., Filimonov N.B., Petrin K.V.
Mechatronics as Computer Paradigm of Engineering Cybernetics Development/
Mechatronics, Automation, Management. – 2009. – No. 6. – P. 2-10).
6. Кориков, А.М. О развитии понятия «мехатроника» // Доклады ТУСУРа. – 2010. – №
1 (21). – Ч. 2. – С. 199-202. (Korikov A.M. About Development Notion of “Mechatronics”
/ Issues Paper of TUSUR. – 2010. – No 1 (21). – Vol. 2. – P. 199-202).
7. Подураев, Ю.С. Мехатроника: основы, методы, применение. – М.:
Машиностроение, 2006. – 256 с. (Poduraev Yu.S. Mechatronics: Basics, Techniques,
Applied. – Moscow: Mashinostroenie, 2006. – 256 p.).
8. Шалобаев Е.В., Толочка Р.-Т. К вопросу терминологии в области мехатроники //
Научно-технический вестник НИУ ИТМО. – 2012. – №5. – С. 148-151. (Shalobaev E.V.,
Tolocka R.-T. Terminology in the Field of Mechatronics // Scientific and Technical Bulletin
of “NTU ITMO”. – 2012. – No 5. – P. 148-151.)
9. Шалобаев Е.В., Толочка Р.-Т. Рекомендиции IFToMM по терминологии в области
мехатроники // Мехатроника, автоматизация, управление. – 2013. – №2. – С. 2-5.
(Shalobaev E.V., Tolocka R.-T. IFToMM Recommendation on Terminology in the Field of
Mechatronics / Mechatronics, Automation, Management. – 2013. – No 2. – P. 2-5.)
10. Шалобаев Е.В., Толочка Р.-Т. Терминологические аспекты современной
мехатроники // Фундаментальные и прикладные проблемы техники и технологий. –
2013. – № 5. – С.122-132. (Shalobaev E.V., Tolocka R.-T. Terminological Aspects of
Modern Mechatronics // Fundamental and Applied Problems of Engineering and
Technologies. – 2013. – No 5. – P. 122-132.)
11. Шалобаев Е.В., Толочка Р.-Т. Современное состояние и перспективы развития
основных понятий в области мехатроники // Научно-технический вестник
информационных технологий, механики и оптики. – 2014. – №1. – С. 156-161.
(Shalobaev E.V., Tolocka R.-T. Modern Station and Perspectives of Development of Basic
Notions in the Field of Mechatronics / Scientific and Engineering Bulletin of Information
Technologies, Mechanics and Optics. – 2014. – No 1. – P. 156-161.)

59
12. Шалобаев Е.В. К вопросу об определении мехатроники и иерархии мехатронных
объектов // Датчики и системы. – 2001. – № 7. – С. 62-65. (Shalobaev E.V. To a question
on definition of notion mechatronics and hierarchies of mechatronical objects // Sensors and
Systems. – 2001. – № 7. – P. 62-65.)
13. Шалобаев Е.В. Вопросы терминологии и миниатюризация аэрокосмических
систем // Мехатроника, автоматизация, управление. – 2013. – №10. – С. 60-66.
(Shalobaev E.V. Problems of Terminology and Miniaturization of Aerospace Systems //
Mechatronics, Automation, Management. – 2013. – No. 10. – P. 60-66.)
14. Шалобаев Е.В., Дунаев А.В., Козырева О.Д. Сканирующая лазеротерапия с
применением биологических обратных связей и мехатронные аспекты
проектирования медицинских установок // Фундаментальные и прикладные проблемы
техники и технологии. – 2014. – №1 (303). – С.101-108. (Shalobaev E.V., Dunaev A.V.,
Kozyreva O.D. Scanning Laser Therapy with Application of Biological Backlinks and
Mechatronic Aspects of Projecting of Medical Installations // Fundamental and Applied
Problems of Engineering and Technology. – 2014. – No. 1 (303). – P. 101-108.)
15. Шалобаев Е.В. Микросистемная техника и мехатроника: особенности
соотношения макро- и микроуровней // Микросистемная техника. – Москва, 2000. – №
4. – С. 5-10. (Shalobaev E.V. Microsystem technics and mechatronics: features of a parity
micro- and macrolevels // Microsystem Technics. – 2000. – No. 4. – P. 5-10.)
16. Shalobaev Е.V. Mechatronics: Today Problems and Development trends of Terminology
// Proceeding 23th Working Meeting of the IFToMM Permanent Commission for
Standardization of Terminology on MMS. – Minsk–Gomel, Belarus, June 21–26, 2010. – P.
111-118.
17. Горбатов П.А. Особенности параллельного проектирования горных выемочных
машин новых поколений как энергетических систем мехатронного класса // Горное
оборудование и электромеханика. – 2010. – № 10. – С. 39-42. (Gorbatov P.A.
Peculiarities of the Parallel Projecting Mining Winning Machines of New Generating as an
Energetically Systems of Mechatronic Grade / Mining Equipment and Electromechanics. –
2010. – No. 10. – P. 39-42.)
18. Nuttall A.J.G., Lodewijks G., Klein Breteler A.J. Optimally Suspended Pipe Conveyor //
Doprava a logistika, 2006. – P. 531-535.
19. Bansevičius R.P.; Toločka R.T., Macha Ewald, Pawliczek Roland. Adaptive Mechanics:
Concept and Course for Mechatronics Study Programme // Mechatronic Systems and
Materials: Selected Papers. – Opole University of Technology, 2007. – P. 7-14.
20. Janocha H. Adaptronics and Smart Structures. – Berlin–Heidelberg–New-York:
Springer-Verlag, 1999.
21. Оганесян А.Т. Система автоматизированного проектирования герконовых реле с
оптимальными параметрами // Известия вузов. Электромеханика. – 2011. – № 2. –
С. 53-55. (Oganesyan A.T. System of Automation Projecting Reed Relays with Optimal
Parameters / Izvestia Vuzov. Electromechanics. – 2011. – No. 2. – P. 53-55.)

60
22. Ткалич В.Л., Лабковская Р.Я., Пирожникова О.И. Анализ присоединенных масс
упругих чувствительных элементов ртутных герконов // Известия вузов.
Приборостроение. – 2012. – Т. 55, № 7. – С. 32-35. (Tkalich V.L., Labkovskaya R.Ya.,
Pirozhnikova O.I. Analysis of attached masses of elastic sensitive elements of wet-reed
relaies // Izvestia Vuzov. Instrumentation. – 2012. – Vol. 55, No. 7. – P. 32-35.)
23. Иванов А.А. Приводы систем точного позиционирования на основе обратного
пьезоэффекта // Труды Нижегородского государственного технического университета
им. Р.Е. Алексеева. – 2013. – № 2(99). – C.105-109. (Ivanov A.A. Drives of the systems of
proper positioning on the base of inverse piezoeffect // Proceedings of R.E. Alexeev Nizhny
Novgorod State Technical University. – 2013. – No. 2 (99). – P.105-109.)
24. Подураев Ю.В. Мехатроника // Большая Российская энциклопедия. В 30-ти тт. Т.
20. (Мео...-Мон...). – М.: Энциклопедия, 2012. – 978 с. (Poduraev Yu.V. Mechatronics /
Bolshaya Rossiiskaya Encyclopedia. Vol. 20. Moscow: Encyclopedia. 2012. – 978 p.)
25. IFToMM: Standardization of terminology. Special issue // Mech. Mach. Theor. –2003. –
Vol. 38. – P. 7-10.
26. Reference-Dictionary Book of Gearing: Russian-Englich-German-French / Editor
V.E.Starzhinsy. – Gomel, 2011. – 219 p.
27. MMS-terms-2003 // [Электронный ресурс] Режим доступа:
www.iftomm.3me.tudelft.nl. (MMS-terms-2003 // [Elerctronic Resource]. Access Mode
www.iftomm.3me.tudelft.nl).

61
25th Working Meeting
of IFToMM Permanent Commission
for Standardization of Terminology on MMS,
Saint-Petersburg, Russia, June 23 – 29, 2014
ON THE THERMINOLOGICAL CONTENTS AND INTERRELATION
OF THE “BIOMECHANICS” SECTION WITH TRADITIONAL
(BASIC) SECTIONS OF MECHANICS
Serge V. Shil'ko, Dr., V.A. Belyi Metal-Polymer Research Institute of NASB (MPRI of
NASB), Gomel, Belarus, [email protected]
Victor E. Starzhinsky, Prof., Dr. Sci., V.A. Belyi Metal-Polymer Research Institute of
NASB (MPRI of NASB), Gomel, Belarus, [email protected]
ABSTRACT
The evolution of mechanics terminology taking into account the biomechanics development
is traced. New interdisciplinary terms (“smart materials”, “adaptive composites”,
“mechanical logics”, “compliant elements”, “moving boundaries”, “actuator”, “processor
function”, “feedback”, “mesomechanics”, “hierarchical model”, etc) which have been
formed on the basis of structural and functional analysis of biosystems (organs and
physically non-linear biological tissues) in the course of creation of artificial materials =
constructions having attributes of intelligent behaviour, are given.
Key words: mechanics, biomechanics, terminology.
Relevance of discussion concerning terminology on biomechanics and its relation with the
basic and more traditional sections of mechanics is caused by the following fundamental
and applied reasons:
raising the status of the human sciences, including the needs in the field of medicine,
physical culture and sports, as well as the concept of a healthy lifestyle;
the necessity of adequate mechanical and mathematical description of biological
architecture as structures, mechanisms and materials optimally "designed" due to the
evolution of nature;
the modern trend of using the principles of living organisms functioning to improve
the existing and developing new technologies, machines and materials (including
adaptive, intelligent, and other special materials and products).

62
Indeed, the problems of the biological world mechanics, in addition to the development of
ideas on the laws of life, promote innovation in all technical areas ranging from prosthetics
funds and ending with the global management system and production. The very complex
technical systems of artificial origin, having the sensor, actuator and even processor
(mental) functions, begin to form based on natural analogues. It even causes pessimistic
predictions about competitiveness of protein-based organisms, although, in our opinion, a
complementary combination of biological and technical systems is progressive and fruitful,
since it provides a basis for the synthesis of more sophisticated products (principle of
composition and synergies).
For convenience, it is advisable to note published in 2005 terminological dictionary on
mechanics [1] where the authors from Metal-Polymer Research Institute of NASB and the
Institute of Polymer Mechanics of the Latvian State University tried to take into account
modern tendencies in the development of a number of mechanics and related disciplines,
including physics, materials science, biology. So, in the dictionary, which includes about
3,500 terms in Belarusian, Russian, German and English, considerable attention is paid to
the terminology of biomechanics, mechanics of composites and technology mechanics. An
expert in the theory of machines and mechanisms may notice a strong terminological
correlation of Section 4.05 “Biomechanics and mechanics of adaptive materials” with an
absolute majority the well-known basic sections presented in dictionary and listed below:
1 Theoretical mechanics
1-01 Fundamental notions
1-02 Statics
1-03 Kinematics
1-04 Dynamics
1-05 Fundamental notions of analytical mechanics
1-06 Fundamental notions of continuum mechanics
1-07 Mechanical vibrations
2 Mechanics of deformable solids
2-01 Strength of material, theory of elasticity
2-02 State of stress
2-03 State of strain
2-04 Strain energy
2-05 Causes of deformation
2-06 Theory of strength
2-07 Material testing
2-08 Buckling
2-09 Bars
2-10 Plates and shells
2-11 Material properties influencing the deformability

63
2-12 Fatigue of materials
2-13 Fracture mechanics
3 Mechanics of fluids and gases
3-01 Ideal incompressible fluids
3-02 Fluid oscillations and wave theory
3-03 Viscous fluids
3-04 Turbulence
3-05 Rheology
3-06 Boundary layer theory
3-07 Gas dynamics
3-08 Heat and mass transfer
3-09 Applied hydrodynamics and hydraulics
3-10 Applied aerodynamics
3-11 The motion of the fluids and gases in the porous media
4 Special parts of mechanics
4-01 Mechanics of composite materials
4-02 Finite and boundary elements numerical methods in mechanics
4-03 Contact mechanics
4-04 Tribology
4-05 Biomechanics and mechanics of adaptive materials
4-06 Structural analysis
4-07 Magnetohydrodynamics
4-08 Acoustics
4-09 Dynamics of plasma
4-10 Dynamics of atmosphere and ocean
4-11 Soil mechanics
4-12 Interior dynamics of the Earth
4-13 Technological mechanics
Due to the diversity of biological and technical systems, the in-depth analysis of
terminology cannot be provided in the compact report; therefore focus is made only on a
few aspects of the problem.
Firstly, the biological and technical systems are closer in terms of complexity and
functionality at the present stage of development. Moreover, the creation of engines and
propellers on other physical principles (as compared to the functioning principles of
biological systems) lead to a world of machinery often exceeding the human or other living
organisms on individual parameters of sensor function (e.g., sensitivity to external physical
actions spectrum) and propulsion function – power, speed, continuity of action, etc.

64
Nevertheless, evolutionary optimized biological systems have been and remain a source for
effective design, engineering and material solutions as well as for a lot of new terms
enriching the mechanics.
So, the design of technical systems is determined by several criteria, such as strength, speed,
material consumption, energy consumption, etc. Manufacturing (production) technical
system is based on a modular principle. Item with the desired characteristics is once
manufactured, and can be replaced during fabrication or operation. By virtue of the modular
principle, one can extend the resource and update the technical systems.
Secondly, biological structures are the result of a long process of selection in evolution, so
their functioning plays a major role in heredity (the inheritance). Each individual has the
biological property of encapsulation, i.e., unauthorized individuals cannot be integrated into
the functioning of the individual algorithms. Polymorphism in relation to biological
automates means a high level of adaptability to different conditions of operation. Human
biological structures can exchange energy, substance, information with the environment in
accordance with the algorithms implemented in the genome, as well as algorithms that are
the result of upbringing, education, life and professional experiences. As known, modern
paradigm is an object-oriented programming which is based on the principles of
encapsulation, inheritance, polymorphism.
Note that encapsulation in biological structures is manifested as immunity which is the main
obstacle to the benefits of technical systems – their modularity. However, biomedicine in
recent decades demonstrates the wonders of prosthetics which successes are largely due to
depth study of the problems of human biomechanics.
In this connection, predictive role of systematizations of material systems and
corresponding terminology at various levels, from general principles of additivity,
synergism and mobility of structure, should be noted. These include systematizations such
as [2] to identify common characteristics of natural objects useful for technical systems.
Adaptive, active and smart materials and constructions as artificial analogues of biological
tissues. As noted above, characterized biostructures are suitable to adaptive response to
changing external conditions. These reactions contribute to the achievement of extremely
valuable strength, frictional, hydrodynamic characteristics (equal strength, wearlessness,
self-healing, damping, ultra-low friction, etc.). It was shown that the phenomenon of
autoregulation of mechanical characteristics (“mechanical logics”) may exist in
thermodynamically non-equilibrium systems which include artificial material systems with
feedback.
Due to the fact that the vast majority of technical systems do not have the aforementioned
properties, relevant research to create artificial materials with elements of autoregulation
was performed. Qualitatively new property of adaptation of heterogeneous materials to
external conditions can be obtained on the basis of self-organized structure and
"programming" of the physical mechanisms that determine the strength and deformation at
the micro- and mesoscopic levels, assuming one of the conditions, the mobility of the
structure of interphase boundaries [3]. With the use of biological analogies authors

65
developed the concept of adaptive materials as structurally inhomogeneous medium with
moving interphase boundaries in terms of mesomechanics[2,3]:
classification of materials based on structural and functional analysis and synergy;
the introduction of the concept of adaptive material implements automatic expedient
restructuring under extreme external action, in accordance with the predetermined
criterion of optimality;
the formulation of mechanism of the functioning of adaptive materials in the form of
a thermodynamically open system with metastable phase composition and feedbacks;
development of the theory of the process of structural adjustment based on a solution
of the problem of localization of moving boundaries;
formulation of mesomechanical models of heterogeneous materials.
Adaptive materials which structure changes respectively under the effect of operating
factors (mechanical stress, temperature, physical fields, environment) when their intensity
reaches a threshold [2-4]. In principle, the structure of any material changes naturally under
the external influence. ‘Respectively’ implies that the adaptive material structure change
promotes the applicability of the article which is contained in it. In other words, new
properties of the material ‘adapted’ to the changed operational conditions determine higher
competitiveness and article quality. The adaptive material structure can restore its initial
state when the external influence ceases [4]; otherwise the structure change becomes
irreversible.
An example of the adaptive material is the plastic grease which is a lubricant-like material
obtained by introduction of a solid thickener (soap, paraffin, etc.) into liquid petroleum or
synthetic oil. At loads below the strength limit the thickener produces a three-dimensional
framework and the lubricant acquires the solid body properties. Under heavy load, it turns
into an abnormally viscous lubricating fluid. After the load ceases, the framework structure
restores and the lubricating material becomes solid again.
Active materials perform their inherent engineering functions and influence positively the
interfaced parts of the article and the environment of the physical, chemical or biological
nature. The criterion of usefulness is the promoted applicability, quality and compatibility of
the article.
Smart (intelligent) material performs in the engineering system the operating functions
relevant to its natural properties, but once the external energy reaches certain threshold, it
transforms this energy into its structure changes improving the operating properties in the
first place, it controls and automatically adjusts their level through the feedback by
comparing the external influence and the extent of properties change [5]. This material is
capable to compare the external influence energy with the extent of primary material
restructuring; the result of this comparison is implemented in the feedback signal targeting
the external influence energy at secondary material structure adjustment.
When characterizing the smart materials, the term “capable” was commonly applied to
individual features of living creatures as the subjective criterion of their successful

66
existence. The synonymous notion “properties” is used in the science of materials. The use
of combination ‘smart materials capability’ is justified as the cybernetic system displays
features of artificial intelligence identical to natural intelligence – the capability of thinking
of living creatures.
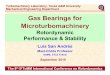
The dynamic optimality of biological tribojoints due to a number of compensatory and
adaptive mechanisms is expressed in relaxation and reducing of contact stresses
concentration. For example, structures shown in Fig. 1 are related to musculoskeletal system
having compliant elements, namely, porous damping layers promoting effective adaptation
to peak loads during walking.
Fig. 1 – Biological tribojoints with compliant elements (intervertebral disc, cartilage).
This vertebrae is separated by elastic fibrous rings with viscous core – in the case of the
spine; conjugation of the femoral head and the acetabulum, the intermediate layer having a
quasi-elastic cartilage, filled with synovial fluid (joint). It is understood that such
malleability intermediate damping elements is much higher compared with a virtually non-
deformable counterbody made of high elastic modulus of bone tissue or tribojoints of
machines and mechanisms.
In this connection it is appropriate to mention the typical terms of biomechanics, denoting
structural elements in the form of prostheses and implants. Mechanical properties of
existing and emerging types of prostheses are largely determined by the structure of
materials (Table). The ideal prosthesis should simulate nonlinear deformation behavior of
living prototypes. Stress state of the simplest version of the damping implants made of a
homogeneous material is uneven and causes inefficient use of material strength in contact
1 – intervertebral disc 2 – fibrous ring 3 – core 4 – nerve
1 – knee 2 – cartilage 3 – acetabulum
2
1
13
T
3
4
Moving boundaries
1
2 3
N
T
р(х)

67
loading. Even the use of gradient materials allows us to provide only statically optimal
structure. The most effective (in real time perspective) implant with multimodular
deformation behavior [2, 3] and metastable structure shows a reversible change of local
compliance. Use of similar metastable materials of porous structure also creates a basis for
reversible changes of local compliance, and, thus, for creation of dynamically optimal
implants.
Table. Stress state of several generations of implants
Structure type Characteristics of stress state
Homogeneous
Layered
Gradient
Metastable
Uniform
Concentration of interface stresses
Statically optimal
Dynamically optimal
Study of these biological systems leads to the problems of mechanics in terms of moving
boundaries. Smart behavior of human dental is realized due to a number of adaptive
phenomena occurring in it [6]:1) the compensated process of wear as a result of enamel
restoration by the underlying layers of dentin; 2) genesis and resorption in periodontal
connective tissue in orthodontic correction of the teeth; 3) providing the optimal number of
microcontacts on the occlusal surface; 4) saving contacts between adjacent teeth on
equatorial surfaces; 5) load balancing on dentition due to misalignment of teeth.
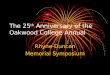
For example, an artificial analogue of tooth and cartilage biological tissue is adaptive
multimodular material having tensosensitivity of elastic moduli. Its initial homogeneous
structure when exposed to, for example, external contact load becomes inhomogeneous due
to the formation of regions S with different elastic moduli (Fig. 2). The developer can
specify the tensosensitivity law, providing reception uniform stress distribution in a given
range of loads that will provide uniform strength design.
Fig. 2 – Formation of the inhomogeneous structure with moving boundaries
under multimodular material loading.
Actuator function. The term "actuator" originated from the biomechanical studies of
muscles, determining the functioning of almost all organs, especially the musculoskeletal
S
N, T

68
and cardiovascular systems. Currently actuators represent drives generating force and
motion in various machines and appliances, including automation in the form of robots and
other actuators.
Let us list the known modes of transportation: bipedal walking, wheel propeller, propeller,
wings, fins and screws, jet engine, solar sail. We have to admit that quite successful attempts
were made to simulate relatively simple principles of motility of historically first creatures -
amphibians and insects. Kinematics of warm-blooded organisms is much more complicated,
and no one species has such a variety of motions (degrees of freedom) as a human [7]. In
this connection one can assume the design of an optimal technique of competitive exercises
[8-10]. Currently, to achieve record results in elite sport it is not enough to analyze the
known forms of movements and techniques necessary to develop exercises with
predetermined parameters. Human movements are purposeful and, thus, they differ greatly
from other natural movements. Kinematical study of a man as a self-control biomechanical
system allowed us to develop mathematical models for motion in terms of support and
support-free state (Fig. 3).
а b
Fig. 3 – Estimated scheme of athlete motion (a) and appearance of equipment (b) to
read the coordinates of the joints according to the exercise video for later analysis.
Subsequent biomechanical analysis of technique of motor actions produces digital and
graphical information on numerous indicators of competitive exercises. As a result,
optimization of the movements of athletes may be performed subject to individual inertial
characteristics and power resources.
The above list shows that the terminology of human motion simulation reflects the basic
concepts adopted in theoretical mechanics:
mass-inertial characteristics of the units of the modeled biosystem;
initial conditions of motion;
restrictions on kinematic structure of the synthesized exercises;
software management, which is realized at the kinematic level;
restrictions on power resources of the sportsman.

69
Thus, the results of this study can be applied to the types of human motor activity
(occupational, household, sports) for which the relevant economization and rationalization
of motor component of motion is needed to achieve the predetermined goals of the
movement.
CONCLUSIONS
New stage of mechanics development as a science is expressed in the actualization of
fundamental research in mechanics of biological systems and processes.
Biomechanical analogs and thorough mathematical analysis of living structures are
the source of new technical solutions and adequate terms dissemination.
REFERENCES
1. Плескачевский Ю.М., Шилько С.В., Тамуж В., Цируле К. Русско-белорусско-
немецко-английский словарь по механике / Под общ. ред. Ю.М. Плескачевского. –
Минск: Белорусская энциклопедия, 2005. – 192 с. (in Russian) (Pleskachevsky Yu.M.,
Shil’ko S.V., Tamuzh V., Cirule K. Russian-Belarusian-German-English Dictionary on
Mechanics / Edited by Yu.M. Pleskachevsky. – Minsk: Belorusskaya entsiklopediya, 2005. –
192 p.).
2. Пинчук Л.C., Гольдаде В.А., Шилько С.В., Неверов А.С. Введение в систематику
«умных» материалов. – Минск: Беларуская навука, 2013. – 399 с. (in Russian) (Pinchuk
L.S., Goldade V.A., Shilko S.V., Neverov A.S. Introduction to the Systematics of "Smart"
Materials. – Minsk: Belaruskaya navuka, 2013. – 399 p.)
3. Shilko S. Adaptive Composite Materials: Bionics Principles, Abnormal Elasticity,
Moving Interfaces / In Book: Advances in Composite Materials – Analysis of Natural and
Man-Made Materials / Ed. P. Tesinova, InTech, 2011. – Chapter 23. – P. 497-526.
4. Шилько С.В., Плескачевский Ю.М. Умные материалы: время убирать кавычки //
Наука и инновации. – 2013. – № 9. – С.26–29. (in Russian) (Shilko S.V., Pleskachevsky
Yu.M. Smart Materials: Time to Remove Inverted Commas // Nauka i innovatsii. – 2013. –
No. 9. – P. 26-29.)
5. Goldade V., Shil’ko S., Neverov A. Smart Materials Taxonomy / CRC Press, Taylor &
Francis Group, 2015. – 277 p.
6. Шилько С.В. Адаптивность дентального аппарата и напряженное состояние зуба
человека // Механика композиц. материалов и конструкций. – 1999. – Т. 5, № 1. – С.
49–59. (in Russian) (Shilko S.V. Adaptability of Dental Apparatus and Stress state of
Human Tooth // Mekhanika kompozitsionnykh materialov i konstruktsii. – 1999. – Vol. 5,
No. 1. – P. 49-59.)

70
7. Бернштейн Н.А. Очерки по физиологии движений и физиологии активности / М.:
Медицина, 1966. – 349 с. (in Russian) (Bernshtein N.A. Essays on the Motion Physiology
and Activity Physiology / Moscow: Meditsina, 1966. – 349 p.)
8. Загревский В.И., Загревский О.И. Математические модели синтеза движений
биомеханических систем / Изд-во Palmarium Academic Publishing, 2012. – 175 с. (in
Russian) (Zagrevsky V.I., Zagrevsky O.I. Mathematical Models of Synthesis of Movements
of Biomechanical Systems / Palmarium Academic Publishing, 2012. – 175 p.)
9. Загревский В.И., Загревский В.О. Планирование траектории управляющих
движений спортсмена в координатах внешнего пространства // Теория и практика
физической культуры. – 2010. – № 10. – С. 56–61. (in Russian) (Zagrevsky V.I.,
Zagrevsky O.I. Path Planning of Control Movements of Athlete in Outer Space Coordinates
// Teoriya i praktika fizicheskoi kultury. – 2010. – No. 10. – P. 56-61.)
10. Grigorenko D.N., Bondarenko K.K., Shil’ko S.V. The Kinematic and Power Analysis of
the Competitive Exercises at Hurdle Race // Russian Journal of Biomechanics. – 2011. –
Vol. 15, No 3. – P. 55-63.