Embed Size (px)
Citation preview

The 14th IFToMM World Congress, Taipei, Taiwan, October 25-30, 2015 DOI Number: 10.6567/IFToMM.14TH.WC.PS3.010
Spring Gravity Compensation Using the Noncircular Pulley
and Cable For the Less-Spring Design
M.C. Cui1 S.X. Wang
2 J.M. Li
3
Tianjin University Tianjin University Tianjin University
Tianjin, China Tianjin, China Tianjin, China
Abstract: This work proposed a new method for a
gravity compensation using the noncircular pulley, cable
driving, and spring balancer. The noncircular pulley is
arranged in the front of one transmission chain. When the
mechanism apply this method for the gravity compensation
of some multi-DOF and multilink manipulator, it can be
achieved that a perfect gravity balance and less number of
springs. To obtain the parameter and arrangement of the
spring and transmission, the potential energy related to the
transmission structure is discussed. Based on the
invariance of all the potential energy of a static balance
mechanism, some design rules and cases are presented to
get the transmission function. In this study, the synthesis of
the noncircular pulley is demonstrated according to the
established transmission function. At last, the example of
gravity compensation for two-DOF yaw-pitch mechanism
is presented. Keywords: Gravity compensation, Spring balancer, Cable driven,
Noncircular pulley
I. Introduction
Gravity compensation of a mechanism can facilitate
control and improve energy efficiency. There are many
available ways to satisfy the need of gravity compensation.
For the static balancing, the method of spring balancer is
advantageous in the introduction of only small amount of
additional inertia to the original system. Many systems,
such as passive rehabilitation devices, service robot, flight
simulator, industrial robot, use the spring balancer to
improve their motion characteristics.
For several decades, many kinds of gravity
compensation with springs have been proposed. Ulrich and
Kumar [1] presented a one-DOF (degree of freedom)
gravity compensator comprised of a noncircular pulley,
wire and spring. Similarly, Endo [2] presented a proximate
spring balancing used a noncircular pulley and a spring for
a three-DOF mechanism. I. Simionescu [3, 4] proposed the
discrete and continuous balancing using the multi-link and
noncircular pulley transmission for one-DOF spring
gravity compensation. Kim [5] presented the perfect
multi-DOF gravity compensation with several one-DOF
spring balancers. In this design, the one-DOF spring
balancer was also comprised of the noncircular pulley and
spring.
Rahman [6] presented a one-DOF spring balancer using
zero-free-length spring for a single link and extended it to
balance a multi-link with the auxiliary links. Agrawal and
Fattah [7, 8] proposed a method for a multi-link planar or
[email protected] 2shuxinw@ tju.edu.cn [email protected]
spatial manipulator. In their study, parallelogram was
adopted to represent the COM (center of mass), and springs
were equipped at the parallelogram. Deepak and
Ananthasuresh [9], Lin [10, 11] presented perfect spring
compensation using only springs without the help of
auxiliary links and respectively developed synthesis
methods for multi-link gravity compensation. Cho [12]
presented multi-DOF gravity compensation using bevel
gears and one-DOF spring balancers. Herder [13]
presented the spring to spring balancer which can adapt
varying load. Gosselin [14] presented spring balancers for
parallel mechanisms.
Although gravity compensation has variety of types, a
unit of spring and transmission are existed in most designs.
This work was inspired by the previous work [1~4, 10]
using the similar structures comprised of the transmission
and one-DOF spring balancer. The transmission has
several different types such as auxiliary links, cable (belt)
driving, bevel gears. However, the special structure, the
parallelogram and the pulley of same radius, causes the
expression of potential energy of each spring balancer have
a common characteristic. It illustrates the mathematic
relationship of rotation angle of each joint is linear sum in
one transmission chain. Our work is to change this ‘linear’
transmission into a more complicated situation by using the
noncircular pulley instead of circular pulley. Different
from the reach [1~5], the noncircular pulley is arranged in
the start of one transmission chain. A complicated
transmission structure which also has more freedom to
satisfy the counterforce provides more availability to the
new design of the perfect gravity compensation.
To obtain the coefficient and arrangement of the spring
and the transmission, the total potential energy of the
springs and the manipulator mass has been investigated.
The perfect balance is equivalent to invariance of all the
potential energy of springs and mass with respect to all
configurations of the mechanism. Agrawal and Fattah [7, 8]
presented a hybrid strategy with the help of auxiliary links
based on the expression of potential energy. Lin [10, 11]
proposed the stiffness block method to determine the
spring’s arrangement with no auxiliary links. Cho [12]
proposed the mapping matrix to the design of the
transmission between the spring balancer and linkage.
Our method is to analyze the expression of the potential
energy using the noncircular pulley transmission structure.
Based on the principle of the invariance of the potential
energy, the gravitational potential energy of the
manipulator is divided into the several parts which are
corresponded to the new kind of spring balancer. Some
design rules and cases are demonstrated using the
noncircular pulley to achieve a perfect and less spring
number gravity compensation.

We implement the theory about the design of the
noncircular pulley on foundations of the former study [5].
According to the function of the transmission, the circle
and noncircular pulley are arranged in a serial by cable
driven. Then, the geometry curve of the noncircular pulley
is calculated using the infinitesimal mathematic process.
The needed structure of antagonistic cable driven and the
assemble pulley are demonstrated.
This paper is organized as follows: Section 2 describes
the general expression of potential energy in spring balance
mechanism using the parallelogram and circle pulley.
Section 3 presents the transmission structure and the
expression of potential energy using the noncircular pulley.
Then some design rules and cases are demonstrated for the
spring balance mechanism. Section 4 presents the synthesis
of the noncircular pulley. Section 5 presents example to
verify the effectiveness and advantage of this method
which makes the spring balance mechanism have less
number of springs. Section 6 presents conclusion of the
present work.
II. Spring compensation with linear transmission
The most spring gravity compensation for multi-DOF
and multi-link manipulator consists of the spring balancer
and the transmission. Each spring provides a
counterbalance with the characteristic of the transmission.
As a result, the entire potential energy of the link mass is
divided into several specified parts balanced by the spring.
This section introduces the basic theory of the spring
compensation using the parallelogram or circle pulley.
Some gravity compensations are discussed to show the
feature of the transmission. These examples are defined as
the spring compensations with linear transmission.
A. One-DOF spring gravity compensation
Fig. 1. One-DOF spring balancer:
(a) using the zero-free-length spring
(b) using the noncircular pulley
One-DOF spring gravity compensator is used for gravity
balancing of the mechanism which has one horizontal
rotation axis. As shown in Fig. 1, the one-DOF spring
gravity compensator is mostly made of the two different
base structures, the zero-free-length spring or the nonlinear
circular pulley. When the mechanism system is gravity
balancing, the total potential energy is constant. This
implies that, the expressions of gravitational potential
energy and elastic potential energy with respect to the joint
angle are complementary. For the one-DOF mechanism
balanced by one spring in Fig. 1, this can be written as
𝑈𝑚 + 𝑈𝑠 = Constant (1)
𝑈𝑚 = 𝑚𝑔𝑙 cos 𝜃 (2)
𝑈𝑠 = 𝐶 − 𝑚𝑔𝑙 cos 𝜃 (3)
Here 𝑈𝑚 denotes the potential energy of the link mass, 𝑈𝑠
denotes the potential energy of the spring, 𝑚 is the link
mass, 𝑔 is the acceleration of gravity, 𝑙 is the length of the
weight arm, 𝜃 is the angle between the vertical and the
weight arm. In spite of different structures of the spring
balancer, the elastic potential energy of each spring has the
same function form of the joint angle for one certain
mechanism.
B. Multi-link and multi-DOF spring gravity compensation
For the multi-link or multi-DOF manipulator, the
gravitational potential energy is the sum of several
different energy items which are the trigonometric terms.
The single spring using a transmission structure generates
the couple torques on each joint. The challenge of a perfect
gravity compensation is to generate proper counterbalance
torque using the most lest springs and transmissions. The
multi-DOF or multi-link statically balancing system also
obeys the principle, the invariance of the entire potential
energy. With a transmission structure, the elastic potential
energy expression of one spring has a specific form.
Because of the complex situation that the expression of the
gravitational potential energy is the function with respect
to multi joint angle, the single spring cannot finish the
work. Several different springs make up the gravity
compensation for the multi-DOF and multi-link
manipulator.
Fig. 2. Two-DOF two-link gravity compensation:
(a) using the zero-free-length spring and cable driven
(b) using the noncircular pulley and parallelogram
Considering a two-link two-DOF mechanism, there are
some methods to balance the gravity of link mass shown in
Fig. 2. The gravitational potential energy of total masses is
computed by
𝑈𝑚 = (𝑚1𝑔𝑙1 + 𝑚2𝑔𝐿1) cos 𝜃1
+𝑚2𝑔𝑙2 cos(𝜃1 + 𝜃2)(4)
Here 𝑚𝑖 is the mass of link 𝑖, 𝑙𝑖 is the length of the weight
arm of link 𝑖, 𝜃𝑖 is the rotational angle of the joint 𝑖. 𝐿1 is
the length of link 1. To balance the gravity, the system
needs the counterbalancing springs with the potential
energy that varies in the form, cos 𝜃1 and cos(𝜃1 + 𝜃2).
Therefore the cos 𝜃1 denotes a spring balancer with the
transmission related to joint 1. And the cos(𝜃1 + 𝜃2)denotes a spring balancer with the transmission related to
joint 1 and joint 2. The parallelogram and cable driven as
the transmission can easily satisfy the function, 𝜃1 + 𝜃2.
Although there are many types for one certain mechanism
due to the variety of one-DOF spring balancer and the
transmission, the each spring finally has the same
expression, just as

𝑈𝑠1= 𝐶 − 𝑚𝑔𝑙 𝑐𝑜𝑠 𝜃1 (5)
𝑈𝑠2= 𝐶 − 𝑚𝑔𝑙 𝑐𝑜𝑠(𝜃1 + 𝜃2) (6)
Fig. 3. (a) One-link roll-pitch manipulator (b) Gravity compensation using the bevel gear in [12]
A one-link roll–pitch manipulator is depicted in Fig. 3.
Respectively, the gravitational potential energy of the
masses is computed by
𝑈𝑚 = 𝑚1𝑔𝑙1 cos 𝜃1 cos 𝜃2 (7)
The cos 𝜃1 cos 𝜃2 cannot directly match the structure
made up of the spring balancer and transmission. It was
always transformed through the product-to-sum identity
cos 𝜃1 cos 𝜃2 = 0.5 cos(𝜃1 + 𝜃2) + 0.5 cos(𝜃1 − 𝜃2) (8)
This equation represents the transmission is similar to a
mechanical differential to satisfy the both 𝜃1 + 𝜃2 and
𝜃1 − 𝜃2 . The mechanical differential, the gear or cable
driven differential, connects with the two spring balancers
to compensate the gravity. These springs generate
correspondent elastic potential energy
𝑈𝑠1= 𝐶 − 0.5𝑚1𝑔𝑙1 cos(𝜃1 + 𝜃2) (9)
𝑈𝑠2= 𝐶 − 0.5𝑚1𝑔𝑙1 cos(𝜃1 − 𝜃2) (10)
As a summary, these calculations show that multi-link
and multi-DOF spring gravity compensations are the
system of several spring balancers and transmission. The
mathematic function of these transmissions is the form of
the linear sum of each joint angle. This implies that the
gravitational potential energy should be divided into
different energy bases according to the transmission
structure. That is to say, the transmission decides the
method of multi-link and multi-DOF spring gravity
compensation. To obtain a new method, one way is to
change the transmission followed by the change of its
expression.
III. Spring compensation with nonlinear transmission
This section introduces the transmission using the
noncircular pulley which is defined as nonlinear
transmission. Spring balancer with a nonlinear
transmission provides an elastic potential energy of new
expression. The method of fabricating the possible
nonlinear transmission for gravity compensation is
proposed.
A. Nonlinear transmission
To adjust the mapping between the input and output,
special transmission is used in mechanism. I. Simionescu
[3, 4] developed the discrete and continuous transmission
using the multi-link and noncircular pulley for gravity
compensation. The aim of these designs is to modify the
motion of springs to match the motion of the link. The
noncircular pulley transmission has more freedom than
multi-link transmission to generate the functional potential
energy and achieve the perfect balancing. Nonlinear
transmission can be presented by replacing the circular
pulley with the noncircular pulley. As shown in Fig. 4, the
mathematics expression of nonlinear transmission is
discussed below.
Fig. 4. Cable driven using the noncircular pulley
The Fig. 4 shows a serial of cable transmission structure.
With respect to the every figure, the relationship of the
rotation angle between the first pulley and links can be
described as follows
𝜃0𝑝
= 𝑓1(𝜃1) (11)
𝜃1𝑝
= 𝜃1 + 𝑓2(𝜃2) (12)
𝜃1𝑝
= 𝜃1 + 𝑓2(𝜃2 + 𝑓3(𝜃3 + ⋯ )) (13)
Here 𝜃𝑖𝑝
denotes the rotation angle of the pulley i, 𝜃𝑖
denotes the rotation angle of the link i, the mapping 𝑓𝑖
presents the rotation angle of the pulley 𝑖 − 1 caused by
the rotation angle of the pulley 𝑖. In Fig. 4(a), the rotation
of pulley 0 is only caused by the rotation of the pulley 1
which is the same as the rotation of the link 1. In Fig. 4(b),
the rotation of pulley 1 is caused by the rotation of pulley 2
and the rotation of link 1. It can be expressed as 𝜃1𝑝
= 𝜃1 +
𝑓2(𝜃2𝑝
) where 𝜃2𝑝
= 𝜃2. It can be expanded into the general
expression as 𝜃𝑖−1𝑝
= 𝜃𝑖 + 𝑓𝑖(𝜃𝑖−1𝑝
). By combining all the
equation of the rotation angles of each adjacent pulley, Eq.
(13) can be concluded as the general expression for
nonlinear transmission.
B. Potential energy with nonlinear transmission
The energy base which presents the gravitational
potential energy balanced by one spring is determined by
transmission structure. To distinguish the two kinds of the
energy base, the energy base decided by the linear
transmission is defined as the linear energy base. Relatively,
the energy base decided by the nonlinear transmission is
defined as the nonlinear energy base.

Fig. 5. One-DOF spring balancer
connected with cable driven transmission
Consider that two kinds of the transmission connect with
the one-DOF spring balancer as shown in Fig. 5. The
general expression of potential energy base can be
expressed as
𝑈𝑗𝑙 = cos (𝜃1 ± ⋯ ±𝜃𝑛) (14)
𝑈𝑗𝑛𝑙 = cos (𝜃1 ± 𝑓2𝑗 (𝜃2 ± 𝑓3𝑗(𝜃3 ± ⋯ ))) (15)
Here 𝑈𝑗𝑙 denotes the linear energy base balanced by the
spring 𝑗, 𝑈𝑗𝑛𝑙 denotes the nonlinear energy base balanced
by the spring 𝑗 , 𝑓𝑛𝑗 denotes the rotation mapping in
transmission connected with spring 𝑗.
Notice that the mapping 𝑓𝑛𝑗 is developed by the
requirement, 𝑈𝑗𝑛𝑙 presents a more variable function than 𝑈𝑗
𝑙.
When the mapping 𝑓𝑛𝑗 is equal to 1, 𝑈𝑗𝑛𝑙 and 𝑈𝑗
𝑙 are same.
C. Methodology for the transmission function
Although there are two kinds of energy bases, the sum of
linear or nonlinear energy bases must be equal to the entire
gravitational potential energy for one statically balancing
mechanism. This implies that the sum of some linear
energy bases must be equal to the sum of some nonlinear
energy bases. This relationship can be described as
𝑉𝑚 = ∑ 𝑈𝑗𝑙 = ∑ 𝑈𝑗
𝑛𝑙 (16)
The question to obtain the category of nonlinear
transmission is equivalent to the combination category of
the nonlinear energy bases. Considering a nonlinear energy
base with two pulleys in a general situation, it can be
expressed as
𝑈𝑖𝑛𝑙 = cos(𝜃1 + 𝑓𝑖(𝜃2)) (17)
𝑈𝑖𝑛𝑙 = cos 𝜃1 cos(𝑓𝑖(𝜃2)) − sin 𝜃1 sin(𝑓𝑖(𝜃2)) (18)
We assume that the mapping 𝑓𝑖 is not equal to 1. Notice
that the nonlinear energy base cannot be independently
equal to any one linear energy base, just as cos (𝜃1 +𝜃2), cos (𝜃1 − 𝜃2), cos (𝜃1). The sum of any two nonlinear
energy bases with two pulleys can be expressed as
𝐾1𝑛𝑙𝑈1
𝑛𝑙 + 𝐾2𝑛𝑙𝑈2
𝑛𝑙 =
cos 𝜃1 𝐹1𝑛𝑙(𝜃2) − sin 𝜃1 𝐹2
𝑛𝑙(𝜃2)(19)
where
𝐹1𝑛𝑙(𝜃2) = 𝐾1
𝑛𝑙 cos(𝑓1(𝜃2)) + 𝐾2𝑛𝑙 cos(𝑓2(𝜃2)) (20)
𝐹2𝑛𝑙(𝜃2) = 𝐾1
𝑛𝑙 sin(𝑓1(𝜃2)) + 𝐾2𝑛𝑙 sin(𝑓2(𝜃2)) (21)
Here 𝐾𝑖𝑛𝑙 denotes the parameter of one nonlinear energy
base. Eq. (26) and Eq. (27) present two equations with two
undetermined mapping 𝑓21 and 𝑓22 . This implies 𝐹1(𝜃2)and 𝐹2(𝜃2) has more freedom to match the expression of
the entire potential energy. Then the sum of two linear
energy bases, 𝑈1𝑙 = cos (𝜃1 + 𝜃2) and 𝑈2
𝑙 = cos (𝜃1 − 𝜃2)can be expressed as
𝐾1𝑙𝑈1
𝑙 + 𝐾2𝑙𝑈2
𝑙 =
cos 𝜃1 𝐹1𝑙(𝜃2) − sin 𝜃1 𝐹2
𝑙(𝜃2)(22)
where
𝐹1𝑙(𝜃2) = 𝐾1
𝑙 cos(𝜃2) + 𝐾2𝑙 cos(𝜃2) (23)
𝐹2𝑙(𝜃2) = 𝐾1
𝑙 sin(𝜃2) − 𝐾2𝑙 sin(𝜃2) (24)
Here 𝐾𝑖𝑙 denotes the parameter of one linear energy base
and 𝐾𝑖𝑙 is known decided by the mechanism. According to
the relationship of the elastic potential energy for one
certain mechanism, Eq. (16) requires that the 𝐾1𝑛𝑙𝑈1
𝑛𝑙 +𝐾2
𝑛𝑙𝑈2𝑛𝑙 is equal to the 𝐾1
𝑙𝑈1𝑙 + 𝐾2
𝑙𝑈2𝑙 . Therefore the
relationship between 𝐹𝑖𝑛𝑙(𝜃2) and 𝐹𝑖
𝑙(𝜃2) is expressed as
𝐹1𝑛𝑙(𝜃2) = 𝐹1
𝑙(𝜃2) (25)
𝐹2𝑛𝑙(𝜃2) = 𝐹2
𝑙(𝜃2) (26)
The Eq. (25) and Eq. (26), two nonlinear equations with
respect to the 𝜃2, determine the two unknown mappings
and two unknown parameter 𝐾𝑖𝑛𝑙. It is obvious that the
four unknown quantity can be calculated.
The following contents describe some cases to achieve
the transformation.
Fig. 6. Multi-DOF or Multi-link manipulator
Case I:
The nonlinear energy base, such as cos(𝑓1(𝜃1)), is a
function about single joint angle 𝜃1 . For some 1-DOF
multi-link mechanism, the entire gravitational potential
energy cannot be simplified to the form as 𝑐𝑜𝑠 𝜃. Cho [15]
presents a design method for static balancer with the
associated linkage. In his reach, various gravity
compensations are designed for four-bar linkage and slider
crank. Several springs and parallelogram are adopted, but
spring numbers are more than their DOFs.
For 1-Dof close-loop mechanism to reduce spring
number, we assume all the gravitational torques caused by
linkage mass effect on the single joint. Because the other
joint motion is correlated with this single joint, the
potential energy can be expanded as one variable function.

As shown in Fig. 6(a), it is described as
𝑉𝑚 = 𝐴 cos 𝜃1 + 𝐵 cos(𝜃1 + 𝜃2)
+𝐶 cos(𝜃1 + 𝜃2 + 𝜃3)(27)
where
𝐴 = 𝑚1𝑔𝑙1 + (𝑚2 + 𝑚3)𝑔𝐿1
𝐵 = 𝑚2𝑔𝑙2 + 𝑚3𝑔𝐿2
𝐶 = 𝑚3𝑔𝑙3
(28)
Notice that the angle 𝜃2 and 𝜃3 is related to 𝜃1. The Eq. (27)
can be written as
𝑉𝑚 = 𝐴 cos 𝜃1 + 𝐵 cos(𝑓𝑎(𝜃1)) + 𝐶 cos(𝑓𝑏(𝜃1)) (29)
where
𝑓𝑎(𝜃1) = 𝜃1 + 𝜃2
𝑓𝑏(𝜃1) = 𝜃1 + 𝜃2 + 𝜃3
(30)
Here 𝑓𝑎 and 𝑓𝑏 denote the mapping between these angles.
Furthermore the Eq. (29) is described as the desired form
which represents the nonlinear energy base as
𝑉𝑚 = 𝐾𝑛𝑙 cos(𝑓𝑠(𝜃1)) (31)
The Eq. (31) shows that one-DOF four-bar mechanism
can be balanced by one nonlinear transmission and one
spring.
Case II:
When the mechanism in Fig. 6(a) exists as the part of
entire mechanism, the gravity compensation can be also
designed using the nonlinear transmission for multi-Dof
mechanism.
As shown in Fig. 6(b), the potential energy can be
described as
𝑉𝑚 = 𝐴 cos 𝜃1 + 𝐵 cos(𝜃1 + 𝜃2)
+𝐶 cos(𝜃1 + 𝜃2 + 𝜃3)
+𝐷 cos(𝜃1 + 𝜃2 + 𝜃3 + 𝜃4)
(32)
where
𝐴 = 𝑚1𝑔𝑙1 + (𝑚2 + 𝑚3 + 𝑚4)𝑔𝐿1
𝐵 = 𝑚2𝑔𝑙2 + 𝑚3𝑔𝐿2 + 𝑚4𝑔𝐿2
𝐶 = 𝑚3𝑔𝑙3 + 𝑚4𝑔𝐿3
𝐷 = 𝑚4𝑔𝑙4
(33)
Notice that the angle 𝜃3 and 𝜃4 is only related to 𝜃2. The
Eq. (32) can be also written as
𝑉𝑚 = 𝐴 cos 𝜃1 + 𝐵 cos(𝜃1 + 𝜃2)
+𝐶 cos(𝜃1 + 𝑓𝑎(𝜃2)) + 𝐷 cos(𝜃1 + 𝑓𝑏(𝜃2))(34)
where
𝑓𝑎(𝜃2) = 𝜃2 + 𝜃3
𝑓𝑏(𝜃2) = 𝜃2 + 𝜃3 + 𝜃4
(35)
The Eq. (31) shows that the potential energy of the entire
mechanism is the function with respect to 𝜃1 and 𝜃2 .
According to the method from Eq. (16) to Eq. (23), the Eq.
(34) can be written as
𝑉𝑚 = 𝐾1𝑛𝑙 cos(𝜃1 + 𝑓1(𝜃2))
+𝐾2𝑛𝑙 cos(𝜃1 + 𝑓2(𝜃2))
(36)
The Eq. (36) shows that mechanism depicted in Fig. 6(b)
can be balanced by two nonlinear transmissions and two
springs.
Case III:
The mechanism shown in Fig. 6(c) is similar to the
mechanism shown in Fig. 6(b). And the potential energy
can be described as
𝑉𝑚 = 𝐴 cos 𝜃1 cos 𝜃2 + 𝐵 cos 𝜃1 cos (𝜃2 + 𝜃3)
+𝐶 cos 𝜃1 cos (𝜃2 + 𝜃3 + 𝜃4)(37)
where
𝐴 = 𝑚1𝑔𝑙1 + (𝑚2 + 𝑚3)𝑔𝐿1
𝐵 = 𝑚2𝑔𝑙2 + 𝑚3𝑔𝐿2
𝐶 = 𝑚3𝑔𝑙3
(38)
Notice that the angle 𝜃3 and 𝜃4 is only related to 𝜃2. Using
the same transforming above, the Eq. (37) can be also
written as
𝑉𝑚 = 𝐴 cos 𝜃1 cos 𝜃2 + 𝐵 cos 𝜃1 cos (𝑓𝑎(𝜃2))
+𝐶 cos 𝜃1 cos(𝑓𝑏(𝜃2))(39)
where
𝑓𝑎(𝜃2) = 𝜃2 + 𝜃3
𝑓𝑏(𝜃2) = 𝜃2 + 𝜃3 + 𝜃4
(40)
Furthermore the Eq. (39) is expressed as
𝑉𝑚 = 𝐾𝑛𝑙 cos(𝜃1 + 𝑓(𝜃2))
+𝐾𝑛𝑙 cos(𝜃1 − 𝑓(𝜃2))(41)
where
2𝐾𝑛𝑙 cos(𝑓(𝜃2)) = 𝐴 cos 𝜃2 + 𝐵 cos(𝑓𝑎(𝜃2))
+𝐶 cos(𝑓𝑏(𝜃2))(42)
Case IV:
As shown in Fig. 6(d), the expression of gravitational
potential energy of the two-DOF pitch-yaw mechanism can
be expanded as
𝑉𝑚 = 𝐴 cos 𝜃1 + 𝐵 cos 𝜃1 cos 𝜃2 (43)
where
𝐴 = 𝑚1𝑔𝑙1 + 𝑚2𝑔𝐿
𝐵 = 𝑚2𝑔𝑙2
(44)
Furthermore the Eq. (43) is extended as
𝑉𝑚 = 𝐾𝑛𝑙 cos(𝜃1 + 𝑓(𝜃2))
+𝐾𝑛𝑙 cos(𝜃1 − 𝑓(𝜃2))(45)
where
2𝐾𝑛𝑙 cos(𝑓(𝜃2)) = 𝐴 + 𝐵 cos(𝜃2) (46)
As a summary, the gravity compensation using the

nonlinear transmission needs less spring for some special
mechanisms. However this method cannot be used in all
the mechanism to reduce spring number for perfect gravity
compensation. It depends on the transformation of the
expression of gravitational potential energy. Some items,
just as constant value or one variable function, can be
combined together into one item. The design to realize this
mathematic procedure is to change the transmission
mapping and the curve of the pulley.
IV. Synthesis of the noncircular pulley
A. Calculation for the curve of noncircular pulley
The transmission mapping 𝑓 is determined by the
procedure mentioned in above chapter. The geometry
curve of the noncircular pulley depends on the certain
mapping 𝑓 . Due to nonlinearity of the transmission
mapping, the synthesis of noncircular pulley is based on
the infinitesimal calculus approach which leads to an
analytical solution. With the help of former study [3], there
needs a series of calculations step by step: 1. the length of
the moment arm, 2. the position of the cable, 3. the
geometry curve of the noncircular pulley. In this paper the
moment arm is obtained through the transmission
mapping 𝑓.
Fig. 7. A schematic diagram of the transmission
with the noncircular pulley and cable
The first step is to derive the relationship between the
moment arms of two adjacent pulleys by using the
principle of virtual work. As shown in Fig. 7(a), the pulley
𝑎 with driving torque 𝜏𝑎 drives the pulley 𝑏 with the load
torque 𝜏𝑏 in a constant speed by cable driven. So the virtual
work of the system and the relationship between the
motions of two pulleys can be expressed as
𝜏𝑎𝛿𝜃𝑎 = 𝜏𝑏𝛿𝜃𝑏 (47)
𝑓(𝜃𝑎) = 𝜃𝑏 (48)
𝑓′(𝜃𝑎)�̇�𝑎 = �̇�𝑏 (49)
Because the torque is equal to the product of the moment
arm and the cable tension, it is described as
𝜏𝑎 = 𝐹𝑐𝑎𝑏𝑙𝑒𝑟𝑎(𝜃𝑎) (50)
𝜏𝑏 = 𝐹𝑐𝑎𝑏𝑙𝑒𝑟𝑏(𝜃𝑎) (51)
Here, 𝐹𝑐𝑎𝑏𝑙𝑒 denotes the tension in cable, 𝑟𝑖(𝜃𝑎) denotes
the moment arm of the pulley 𝑖 with angle variable 𝜃𝑎 .
Considering 𝛿𝜃 is equal to �̇�, the overall procedure derives
the relationship between the transmission mapping and the
radius of the pulley.
𝑟𝑎(𝜃𝑎) 𝑟𝑏(𝜃𝑎)⁄ = 𝑓′(𝜃𝑎) (52)
Fig. 8. A schematic diagram of the geometry curve
of the noncircular pulley
The second step is to obtain the planar position of the
cable on one pulley with respect to all configurations. The
radius of pulley 𝑎 is determined by 𝑓′(𝜃𝑎) and 𝑟𝑏(𝜃𝑎) at
each angle of the pulley 𝑎. For simplification the pulley 𝑏
is considered as circle pulley, so that the radius and the
moment arm are constant. As shown in Fig. 7(a), the
equation of the line 𝐴𝐵 which presents the cable’s position
at the joint angle of 𝜃𝑎 can be expressed as
𝑦 = 𝐴(𝜃)𝑥 + 𝐵(𝜃) (53)
where
𝐴(𝜃) = tan(𝜃 + 𝜇) (54)
𝐵(𝜃) = 𝑟𝑎(cos(𝜃 + 𝜇) − sin(𝜃 + 𝜇) tan(𝜃 + 𝜇)) (55)
𝜇 = arcsin ((𝑟𝑎(𝜃) − 𝑟𝑏(𝜃)) 𝑙𝑜⁄ ) (56)
Here 𝑙𝑜 denotes the distance between the two pulleys.
The third step is to obtain the equations of the geometry
curve. Once the moment arms of each pulley are known at
the entire possible angles, the planar positions of the
transmission cable trance out the profile of the pulley. As
shown in Fig. 7(b), the position of the transmission cable
changes with respect to the motion of pulley 𝑎. When the 𝜃
changes infinitesimally, the intersection point P of the two
lines at joint angle 𝜃 and 𝜃′ is at the profile of the pulley.
So the position of the point P can expressed as
𝑥𝑝 = − (𝐵(𝜃′) − 𝐵(𝜃)) (𝐴(𝜃′) − 𝐴(𝜃))⁄ (57)
𝑦𝑝 = (𝐴(𝜃′)𝐵(𝜃) − 𝐴(𝜃)𝐵(𝜃′)) (𝐴(𝜃′) − 𝐴(𝜃))⁄ (58)
where 𝜃′ = 𝜃 + 𝛿𝜃, 𝑥𝑝 and 𝑦𝑝 are the coordinates of the
intersection point 𝑃. When the 𝛿𝜃 becomes infinitesimal,
Eq. (57) and Eq. (58) can be expanded as
𝑥𝑝(𝜃) = − 𝐵′(𝜃) 𝐴′(𝜃)⁄ (59)

𝑦𝑝(𝜃) = − 𝐴(𝜃)𝐵′(𝜃) 𝐴′(𝜃)⁄ + 𝐵(𝜃) (60)
B. Parameter selection
It is to be necessary that the profile of the pulley should
be a continuous differentiable curve to reach the proper
transmission. In the research [16], it decided that the
transmission mapping cannot be all the required functions.
Once the derivation of the transmission mapping, 𝑓′(𝜃),
changes sign, the curve is a strong nonlinear that leads the
interference of the cable. To avoid this situation, the
transmission mapping should be selected to generate the
proper profile of the pulley.
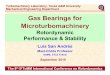
Fig. 9. Geometry curve of the noncircular pulley
with different parameter 𝐾
𝑚1 𝑚2 𝑙1 𝑙2 𝐿1
0.3kg 0.5kg 0.2m 0.2m 0.3m
𝑟𝑏 𝑙𝑜 𝑔 𝜃2
10cm 30cm 0.98 [−135o, 135o]
Table. 1. The design parameters
For example, the transmission function of Case IV in
Section III is 𝐾 cos(𝑓(𝜃2)) = 𝑚1𝑔𝑙1 + 𝑚2𝑔𝐿 +
𝑚2𝑔𝑙2 cos 𝜃2. The value of the parameter 𝐾 chosen in a
range decides both the geometry curve of the noncircular
pulley and motion range of the joint.
As shown in Fig. 9, three geometry curves are
demonstrated with the parameters in Table. 1. Consider
that 𝑇 = 𝑚1𝑔𝑙1 + 𝑚2𝑔𝐿 + 𝑚2𝑔𝑙2. When the value of 𝐾is equal to 𝑇, the curve is a continuous line and the motion
range is wide enough from −π to π. When the 𝐾 is less or
great than 𝑇, the curve is discrete and the motion range is
decreasing.
C. The design of the antagonistic cable driven
In many robots, the gravitational torque is bi-directional
effect on the joint. To obtain more motion space with the
configuration of the gravity compensation, the antagonistic
cable driven design is necessary to transmit bi-directional
torque.
According to close-loop transmission of the cable driven
using the circle pulley, we consider that there are two lines
on one pulley which should be calculated separately. When
the cable wraps a distance around the pulley on the one side,
the cable unwraps the same distance on the other side. The
antagonistic design of the noncircular pulley is to maintain
the length of each moment arm equal on each side.
Fig. 10. The antagonistic design for cable driven
Different from the circle pulley, two lines of the
noncircular pulley cannot connect with each other by end
to end in most cases. As shown in Fig. 10, the profile of the
noncircular pulley consists of two lines separately which
overlaps each other. Notice that the geometry of two lines
is the same located at different angles. It leads to that the
noncircular pulley can be assembled with two same pulleys
in two layers.
V. Design examples
This section presents a design example of spring gravity
compensation for two-DOF pitch-yaw manipulator. The
new design method using the noncircular pulley will
reduce the number of the springs and abbreviate the entire
structure. The transmission structure and the profile of the
each pulley are discussed and calculated in more details.
Fig. 11. Two-DOF pitch-yaw manipulator
The manipulator is depicted in Fig. 11. 𝜃1 and 𝜃2
represent rotation angles in the 𝑧1 and 𝑧2 axes, respectively.
The gravitational potential energy is computed by
𝑉𝑚 = 𝑉𝑚1+ 𝑉𝑚2
𝑉𝑚1= 𝑚1𝑔𝑙1 cos 𝜃1
𝑉𝑚2= 𝑚2𝑔𝑙2 cos 𝜃1 cos 𝜃2 + 𝑚2𝑔𝐿1 cos 𝜃1
where 𝑙𝑖 denotes the moment arm of the link 𝑖, 𝐿𝑖 denotes
the distance of the link. Notice that the entire potential
energy has two energy items of 𝑐𝑜𝑠 𝜃1 𝑐𝑜𝑠 𝜃2 and 𝑐𝑜𝑠 𝜃1
which can generate three linear energy bases,
𝑈1𝑙 = 𝐾1
𝑙 cos 𝜃1
𝑈2𝑙 = 𝐾2
𝑙 cos(𝜃1 + 𝜃2)
𝑈3𝑙 = 𝐾3
𝑙 cos(𝜃1 − 𝜃2)

where 𝐾𝑖𝑙 denotes the parameter of the linear energy base 𝑖.
So 𝐾1𝑙 = 𝑚1𝑔𝑙1 + 𝑚2𝑔𝐿1 , 𝐾2
𝑙 = 𝐾3𝑙 = 0.5𝑚2𝑔𝑙2 . Three
linear energy bases denote the gravity compensation of this
manipulator should have three transmission chains and
three springs using the circle pulley or parallelogram.
According to the method described in Section III, two
nonlinear energy bases, instead of three linear energy bases,
can be fabricated to reduce the number of springs and
cables. For simplicity, the specific expanding is
demonstrated as follows
𝑉𝑚 = 𝐾 cos 𝜃1 cos(𝑓(𝜃2))
𝐾 cos(𝑓(𝜃2)) = 𝑚2𝑔𝑙2 cos 𝜃2 + 𝑚2𝑔𝐿1 + 𝑚1𝑔𝑙1
Then, the spring compensation system consists of two
nonlinear energy bases, just as
𝑈1𝑛𝑙 = 0.5𝐾1
𝑛𝑙 cos(𝜃1 + 𝑓(𝜃2))
𝑈2𝑛𝑙 = 0.5𝐾2
𝑛𝑙 cos(𝜃1 − 𝑓(𝜃2))
where 𝐾𝑖𝑛𝑙 denotes the parameter of the nonlinear energy
base 𝑖, 𝐾1𝑛𝑙 = 𝐾2
𝑛𝑙 = 𝐾.
(a)
(b) Fig. 12. Spring gravity compensation for two-DOF pitch-yaw
mechanism: (a) planar schematic (b)stereoscopic model
The relevant parameters for the design are chosen as:
𝑚1 = 0.3kg , 𝑚2 = 0.5kg , 𝐿1 = 0.3𝑚 , 𝑙1 = 𝑙2 = 0.2𝑚 ,
𝑟1 = 0.1𝑚. And 𝐾 is calculated to be 0.1514N. m. In Fig.
12, the entire part of the transmission and mechanism is
demonstrated by planar schematic and stereoscopic model.
Pose 𝜃1 𝜃1
1 0° 0°
2 0° 15°
3 15° 0°
4 15° 15°
5 15° 30°
6 30° 15°
7 30° 30°
Table. 2. Poses for simulation
Fig. 13. Computation of the potential energy
To verify the effectiveness of the method, seven poses
are chosen to calculate the elastic potential energy and
gravitational potential energy of the mechanism. The pose
index is shown in Table. 2. As shown in Fig. 17, the total
potential energy maintains the invariant for all the poses.
VI. Conclusion of the present work
This paper presents a new method for static balancing of
mechanisms with conservative loads such as gravity and
spring loads using noncircular pulley and cable driven. The
method, which completely balances gravitational torque,
provides reduction the actuator requirements under space
constraints.
The transmission structure is key factor to determine the
expression of the potential energy of the springs. The new
transmission structure, using the noncircular pulley at the
start of the transmission, is adopted to generate more
flexible spring force for gravity compensation. The entire
gravitational potential energy is divided into several parts
which correspond with the new structure. This paper uses a
simple way, transformation of the expression of the
potential energy, to find out the transmission structure and
coefficient of the spring. As a result, the number of the
springs is reduced for the gravity compensation of some
special mechanism.
Although the method cannot apply in all the mechanism
to reduce the spring number, it is a new way to achieve a
complete static balancing. With no auxiliary linkages and
suspending cable, the resultant mechanism is more
compact.
We implement the theory of the design of the noncircular
pulley based on the former study. According to the function
of the transmission mapping, the geometry curve of the
noncircular pulley is calculated using the infinitesimal
mathematic process. The circle pulley and noncircular
pulley are arranged in a serial by cable driven. The
selection and a needed structure of antagonistic cable
driven are demonstrated.
Future work is to find out the more availability of the
transmission structures which present more availability of

the expression of the potential energy. We believe the more
mechanism adopt flexible transmission to have a less
spring number structure for gravity compensation.
Acknowledgment
Research supported by National Natural Science
Foundation of China under No. 51290293.
References
[1] N. Ulrich, V. Kumar, Passive mechanical gravity compensation for robot manipulators, Proc. of the 1991 IEEE Int. Conf. on Robotics and Automation, Sacramento, 1991, pp. 1536–1541.
[2] G. Endo, H. Yamada, A. Yajima, M. Ogata, S. Hirose, A passive weight compensation mechanism with a non-circular pulley and a spring, Proc. of the 2010 IEEE Int. Conf. on Robotics and Automation, Anchorage, 2010, pp. 3843–3848.
[3] I. Simionescu, L. Ciupitu, The static balancing of the industrial robot arms, part I: discrete balancing, Mech. Mach. Theory 35 (9) (2000) 1287–1298.
[4] I. Simionescu, L. Ciupitu, The static balancing of the industrial robot arms, part II: continuous balancing, Mech. Mach. Theory 35 (9)
(2000) 1299–1311.
[5] B. Kim, A.D. Deshpande, Design of Nonlinear Rotational Stiffness Using a Noncircular Pulley-Spring Mechanism, ASME J. Mech. Robot. 6 (2014): 041009.
[6] T. Rahman, R. Ramanathan, R. Seliktar, W. Harwin, A simple technique to passively gravity-balance articulated mechanisms, ASME J. Mech. Des. 117 (1995) 655–658.
[7] S.K. Agrawal, A. Fattah, Gravity-balancing of spatial robotic manipulator, Mech. Mach. Theory 39 (12) (2004) 1331–1344.
[8] A. Fattah, S.K. Agrawal, Gravity-balancing of classes of industrial robots, Proc. of the 2006 IEEE Int. Conf. on Robotics and Automation, Orlando, 2006, pp. 2872–2877.
[9] S.R. Deepak, G.K. Ananthasuresh, Perfect static balance of linkages by addition of springs but not auxiliary bodies, ASME J. Mech. Robot. 4 (2012) 021014.
[10] P.Y. Lin, W.B. Shieh, D.Z. Chen, A stiffness matrix approach for the design of statically balanced planar articulated manipulators, Mech. Mach. Theory 45 (2010) 1877–1891.
[11] P.Y. Lin, Design of statically balanced spatial mechanisms with springs suspensions, ASME J. Mech. Robot. 4 (2) (2012) 021015.
[12] C.H. Cho, S.C. Kang, Design of a static balancing mechanism for a serial manipulator with an unconstrained joint space using one-DOF gravity compensators, IEEE Trans. Robot. 30 (2014) 421–431.
[13] J.L. Herder, R. Barents, M. Schenk, W.D. van Dorsser, B.M. Wisse, Spring-to-spring balancing as energy-free adjustment method in gravity equilibrators, Proc. Of the ASME 2009 Int. Eng. Technical
Conf. and Computer and Inf. in Eng. Conf, 2009, pp. 1–12.
[14] C.M. Gosselin, J. Wang, On the design of gravity-compensated six-degree-of-freedom parallel mechanisms, Proc. of the 1998 IEEE
Int. Conf. on Robotics and Automation, 1998, pp. 2287–2294.
[15] S.H. Kim, C.H. Cho, Design of planar static balancer with associated linkage, Mech. Mach. Theory 81 (2014) 79-93.
[16] A.J. McPhate, Function Generation With Band Mechanisms, J. Mech. 1 (1966) 85–94.