Embed Size (px)
Citation preview

With Quanser the possibilities are in�nite + 1 ( 9 0 5 ) 9 4 0 - 3 5 7 5 w w w. q u a n s e r . c o m
Description
Key Features Curriculum Topics• Disturbance Rejection
• Tracking Control & Regulation
• Coupled Systems
• Full State-Feedback
• Observer Design & Implementation
• Frequency Analysis
• System Modeling & Simulation
• Pole-Placement Technique
• Root Locus Design
• Non-Linear Friction
• Hardware in the Loop
• Real-Time Control
• Discrete Time Sampling
• System Identi�cation
• Multivariable Control Design
Product Information Sheet S2 - 1 - rev. C
Quanser has developed an extensive range of complex Specialty Challenges, a select sampleof these experiments includes:
The 2 DOF Helicopter is an Aerospace Control Challenge, and part of the Quanser SpecialtyControl Challenge Range. Other Aerospace Control Challenges include:
For details of these experiments and more, visit our website www.quanser.com
Range of QuanserSpecialty
Experiments
Related AerospaceChallenges
Specialty Control Challenges
MAGLEV – Magnetic LevitationShaker Tables and Smart Structures2 DOF Serial Flexible Link / JointHeat�ow ExperimentCoupled TanksIndustrial Mechatronic Drives Unit
High Fidelity Linear Cart SystemTriple Inverted Pendulum, Dual Inverted Pendulum ….5 DOF Open Architecture RobotsMechatronics KitThe Cube3 DOF Crane
Aerospace Control Challenges
• 3 DOF Helicopter • 3 DOF Hover
• Fully compatible with Matlab/Simulink & LabVIEW
• Open architecture design
• High Quality Slipring allows for unlimited yaw
• High Resolution Encoders to sense position and
rate feedback of yaw and pitch axis
• High Quality Aluminum chassis with precision
crafted parts
• Equipped with safety grills surrounding both
propeller blades to eliminate injury
• Fully documented system models & parameters
The 2 DOF (Degrees of Freedom) Helicopter o�ers the student a unique opportunity to control the pitch and yaw of a simpli�ed Helicopter model. Actuated by 2 DC motors, mounted at 90 degrees to each other, it has the ability to pitch and yaw. The Helicopter frame is free to rotate on a vertical base equipped with an electrical contact slipring. Electrical signals to and from the Helicopter are channeled through the slipring to eliminate tangled wires, reduce friction and allow for unlimited and unhindered yaw. The coupling between the pitch and yaw motor torques results in a coupled 2 input - 2 output system. The experiment provides an economical Hardware-in-the-Loop testbed to understand and develop control laws for a vehicle that has dynamics representative of a tethered rigid body helicopter, spacecraft or underwater vehicle.
2 DOF Helicopter
SPECIALTY CHALLENGE
SystemSpecifications
stinUeulaVnoitacificepSmc54thgieH ydoB
gk5.3thgieW ydoB
mc5.71 x 5.71)W x L( snoisnemiD esaB
m gk703.0aitrenI fo tnemoM ydoB 2
mc6.04htgneL latoT
mc3.02rotom hctip ot tovip morf ecnatsiD
mc3.02rotom way ot tovip morf ecnatsiD
mm082retemaid relleporp hctiP
seerged)°54±(°09noitom fo egnar hctiP
mm302retemaid relleporp waY
seerged°063noitom fo egnar waY
ver/stnuoc6904noituloseR redocnE hctiP
ver/stnuoc2918noituloseR redocnE waY
V/N2278.0tnatsnoc ecrof rotom hctiP
V/N24.0tnatsnoc ecrof rotom waY
SystemRequirements
Product Information Sheet S2 - 2 - rev. C
The 2 DOF Helicopter plant requires the following components to complete the experimental setup:
evitanretlAdednemmoceR resnauQtnenopmoC(Common Configuration)
Power Modul Alternate Power Ampli�er(Minimum requirements: +/- 24V, 5A)
2 x Quanser UPM 2405
Quanser Q4, Q8 Series
Quanser QuaRC
Control Hardware dSPACE DS1104*National Instruments E- or M-Series DAQs*
Control Software The Mathworks – RTWT, xPCdSPACE – ControlDesk
National Instruments – LabVIEW
* Quanser o�ers interface boards for NI E- and M- series & dSPACE DS1104 boards.
With Quanser the possibilities are in�nite + 1 ( 9 0 5 ) 9 4 0 - 3 5 7 5 w w w. q u a n s e r . c o mProducts and/or services referred to herein are trademarks or registered trademarks of Quanser Inc. and/or its a�liates. Other product and company namesmentioned herein are trademarks or registered trademarks of their respective owners. © 2008 Quanser Inc. All rights reserved. Speci�cations are subject to change without notice. Errors and omissions excepted.
TypicalResponse
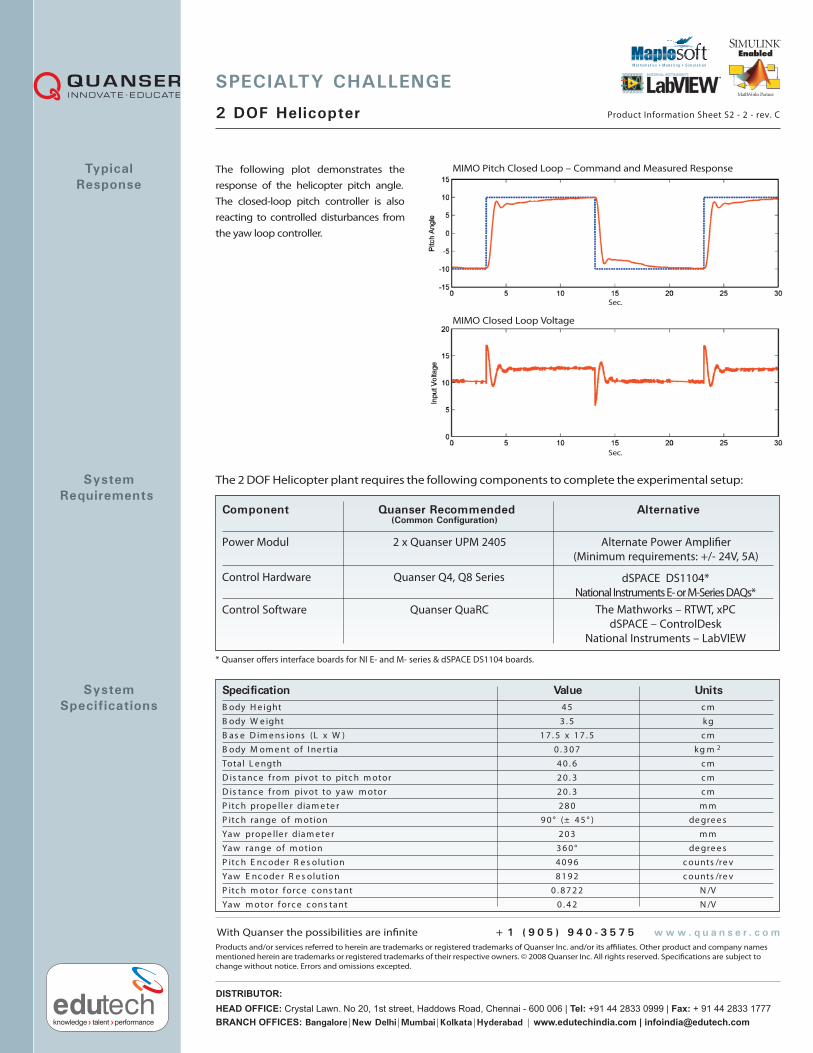
The following plot demonstrates theresponse of the helicopter pitch angle.The closed-loop pitch controller is alsoreacting to controlled disturbances fromthe yaw loop controller.
MIMO Pitch Closed Loop – Command and Measured Response
Sec.
Sec.
MIMO Closed Loop Voltage
BRANCH OFFICES: Bangalore|New Delhi|Mumbai|Kolkata|Hyderabad | www.edutechindia.com | [email protected] OFFICE: Crystal Lawn. No 20, 1st street, Haddows Road, Chennai - 600 006 | Tel: +91 44 2833 0999 | Fax: + 91 44 2833 1777DISTRIBUTOR:
2 DOF Helicopter
SPECIALTY CHALLENGE











![Photo Quality Assessment based on a Focusing Map to ... · ference in DoF. (a) A deep DoF photo. (b) A shallow DoF photo. tos [2, 6]. In contrast to these works, we proposed a DoF](https://img.pdfslide.us/doc/110x75/5f0fe6767e708231d44671d5/photo-quality-assessment-based-on-a-focusing-map-to-ference-in-dof-a-a-deep.jpg)















![58 Paper 250-Real-Time Control of a 2-Dof Helicopter Via ... · controller with limited performance indicators, as in [14]. In another attempt, hybrid robust control in conjunction](https://img.pdfslide.us/doc/110x75/5e6b6bc5fbfefc362c0d0dd5/58-paper-250-real-time-control-of-a-2-dof-helicopter-via-controller-with-limited.jpg)