Embed Size (px)
DESCRIPTION
Citation preview


• Graphical method
• Cramer's Rule
• The Elimination of
Unknowns

A graphical solution is obtainable for two equations by plotting on Cartesian
coordinates with one axis corresponding to x1 and the other x2.
a11 x1 + a12x2 = b1
a21 x1 + a22x2 = b2
Both equations can be solved for x2:
Thus, the equations are now in the form of straight lines; that is,
x1=(slope)x1+intercept.Yhese lines can be graphed on Cartesian coordinates with
x2 as the ordinate and x1 as the abscissa. The values of x1 and x2 at the
intersection of the lines represent the solution

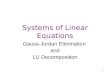
Example Use the graphical method to solve :
Solution. Let x1 be the abscissa. Solve eq,1 and eq,2 for x2

0
1
2
3
4
5
6
7
8
9
0 1 2 3 4 5 6 7 8 9
X2
X1
Graphical Method
2
1
Solution x1=4 x2=3
Graphical solution of a set of two simultaneous linear algebraic
equations. The intersection of the lines represents the solution

Cramer´s rule is another solution technique that is
best suited to small numbers of equation .
This rule states that each unknown in a system of
linear algebraic equations may be expressed as a
fraction of two determinants with denominator D and
with the numerator obtained from D by replacing the
column of coefficients of the unknown in question by
the constants b1, b2,b3 … bn, for example ,x1 would
be computed as
𝑥1 =
𝑏1 𝑎12 𝑎13
𝑏2 𝑎22 𝑎23
𝑏3 𝑎23 𝑎33
𝐷

Example:
Use Cramer´s rule to solve
𝒙 + 𝟎𝒚 − 𝟐𝒛 = 𝟑𝟎𝒙 − 𝒚 + 𝟑𝒛 = 𝟏
𝟐𝒙 + 𝟎𝒚 + 𝟓𝒚 = 𝟎
𝐷 =1 0 −20 −1 32 0 5
𝐷𝑥 =3 0 −21 −1 30 0 5
𝐷𝑦 =1 3 −20 1 32 0 5
𝐷𝑧 =1 0 30 −1 12 0 0
The determinant can be written as det D=-9, det Dx=-15, det Dy=27 y det
Dz=6. Therefore 𝒙 =−𝟏𝟓
−𝟗 𝒚 =
𝟐𝟕
−𝟗 𝒛 =
𝟔
−𝟗

The elimination of unknowns by combining equations is an algebraic
approach that can be illustrated for a set of two equations:
𝑎11𝑥1 + 𝑎12𝑥2 = 𝑏1
𝑎21𝑥1 + 𝑎22𝑥2 = 𝑏2
The basic strategy is to multiply the equations by constants so that one of the
unknowns will be eliminated when the two equations are combined. The result
is a single equation that can be solved for the remaining unknown, and this
value can then be substituted into either of the original equations to compute
the other variable
𝑎21(𝑎11𝑥1 + 𝑎12𝑥2) = 𝑏1𝑎21 𝑎11(𝑎21𝑥1 + 𝑎22𝑥2) = 𝑏2𝑎11

This method to solve equations is called
Naïve Gauss Elimination because it does
not avoid division by zero. The technique
for n equations consists of two phases :
• Elimination of unknowns
• Solution through back substitution

𝒂𝟏𝟏 𝒂𝟏𝟐 𝒂𝟏𝟑
𝒂𝟐𝟏 𝒂𝟐𝟐 𝒂𝟐𝟑
𝒂𝟑𝟏 𝒂𝟐𝟑 𝒂𝟑𝟑
=
𝒃𝟏
𝒃𝟐
𝒃𝟑
𝒂𝟏𝟏 𝒂𝟏𝟐 𝒂𝟏𝟑
𝟎 𝒂´𝟐𝟐 𝒂´𝟐𝟑
𝟎 𝟎 𝒂´´𝟑𝟑
=
𝒃𝟏
𝒃´𝟐
𝒃´´𝟑
𝒙𝟑 =𝒃´´𝟑
𝒂´´𝟑𝟑
𝒙𝟐 =𝒃´𝟐 − 𝒂´𝟐𝟑
𝒂´𝟐𝟐
𝒙𝟏 = (𝒃𝟏 − 𝒂𝟏𝟐𝒙𝟐 − 𝒂𝟏𝟑𝒙𝟑)/𝒂𝟏𝟏
The first phase is designed to reduce the set of
equation to an upper triangular system.
Multiply eq.1 by 𝑎21/𝑎11 to give:
𝑎21 +𝑎21
𝑎11𝑎12𝑥2+. .+ +
𝑎21
𝑎11𝑎1𝑛𝑥𝑛 = +
𝑎21
𝑎11𝑏1
Now this equation can be subtracted from eq.2
to give:
𝑎22 − +𝑎21
𝑎11𝑎12 𝑥2+..+ 𝑎2𝑛 − +
𝑎21
𝑎11𝑎1𝑛 𝑥𝑛 = 𝑏2 −
𝑎21
𝑎11𝑏1
or
𝑎´´22𝑥2+. . +𝑎´´2𝑛𝑥𝑛 = 𝑏´2
Where the prime indicates that the elements have been
changed from their original values. The procedure is
then repeated for the remaining equations. eq,. Can be
multiplied by 𝑎31
𝑎11 and the result can be subtracted from
the third equation. Now the equations are solved
starting from the last equation as it has only one
unknown by back sustitution.
𝑎11𝑥1 + 𝑎12𝑥2 + 𝑎13𝑥3+. . +𝑎𝑛𝑛𝑥𝑛 = 𝑏1
𝑎21𝑥1 + 𝑎22𝑥2 + 𝑎23𝑥3+. . +𝑎𝑛𝑛𝑥𝑛 = 𝑏2
𝑎𝑛1𝑥1 + 𝑎𝑛2𝑥2 + 𝑎𝑛3𝑥3+. . +𝑎𝑛𝑛𝑥𝑛 = 𝑏𝑛
.
.

Example: Use Naïve Gauss elimination to solve
Working in the matrix form
First step
Divide Row 1 by 20 and then multiply it by –3, that is, multiply Row 1 by
Subtract the result from Row 2

to get the resulting equations as
Divide Row 1 by 20 and then multiply it by 5, that is, multiply Row 1 by
Subtract the result from Row 3
to get the resulting equations as

Second step
Now for the second step of forward elimination, we will use Row 2 as
the pivot equation and eliminate Row 3 Column 2 to get the resulting
equations as
Back substitution
We can now solve the above equations by back substitution. From the third
equation
Substituting the value of in the second equation

Substituting the value of and in the first equation,
Hence the solution is

Division by zero: It is possible for division by zero to occur during the beginning
of the steps of forward elimination.
For example
will result in division by zero in the first step of forward elimination as the
coefficient of in the first equation is zero as is evident when we write the
equations in matrix form.

Another example
There is no issue of division by zero in the first step of forward elimination. The pivot
element is the coefficient of in the first equation, 5, and that is a non-zero number.
However, at the end of the first step of forward elimination, Now at the beginning of
the 2nd step of forward elimination, the coefficient of in Equation 2 would be used as
the pivot element. That element is zero and hence would create the division by zero
problem.
So it is important to consider that the possibility of division by zero can occur at the
beginning of any step of forward elimination.
Round-off error: The Naïve Gauss elimination method is prone to round-off errors.
This is true when there are large numbers of equations as errors propagate. Also, if
there is subtraction of numbers from each other, it may create large errors.

Round off errors were large when five significant digits
were used as opposed to six significant digits. One
method of decreasing the round-off error would be to use
more significant digits, that is, use double or quad
precision for representing the numbers. However, this
would not avoid possible division by zero errors in the
Naïve Gauss elimination method. To avoid division by
zero as well as reduce (not eliminate) round-off error,
Gaussian elimination with partial pivoting is the method of
choice.

Gauss-Jordan Elimination is a variant of Gaussian
Elimination. Again, we are transforming the coefficient
matrix into another matrix that is much easier to solve, and
the system represented by the new augmented matrix has
the same solution set as the original system of linear
equations. In Gauss-Jordan Elimination, the goal is to
transform the coefficient matrix into a diagonal matrix, and
the zeros are introduced into the matrix one column at a
time
Gauss-Jordan Elimination Steps
• Write the augmented matrix for the system of linear equations.
• Use elementary row operations on the augmented matrix [A|b] to
transform A into diagonal form. If a zero is located on the diagonal,
switch the rows until a nonzero is in that place. If you are unable to do
so, stop; the system has either infinite or no solutions.
• By dividing the diagonal element and the right-hand-side element in
each row by the diagonal element in that row, make each diagonal
element equal to one.

Example:
In Gauss-Jordan Elimination we want to introduce zeros both below and
above the diagonal.
1. Write the augmented matrix for the system of linear equations.
As before , we use the symbol to indicate that the matrix
preceding the arrows is being changed due to the specified
operation; the matrix following the arrow displays the result of that
change.

2. Use elementary row operations on the augmented matrix [A|b] to
transform A into diagonal form
At this point we have a diagonal coefficient matrix. The final step in Gauss-
Jordan Elimination is to make each diagonal element equal to one. To do this,
we divide each row of the augmented matrix by the diagonal element in that row

3. By dividing the diagonal element and the right-hand-side element in
each row by the diagonal element in that row, make each diagonal
element equal to one.
Our solution is simply the right-hand side of the augmented matrix.
Notice that the coefficient matrix is now a diagonal matrix with ones on
the diagonal. This is a special matrix called the identity matrix

The LU decomposition is a matrix decomposition which writes a matrix as the
product of a lower triangular matrix and an upper triangular matrix. The product
sometimes includes a permutation matrix as well. This decomposition is used in
numerical analysis to solve systems of linear equations or calculate the
determinant.
Definition 1 If A is a square matrix and it can be factored as A = LU where L is a
lower triangular matrix and U is an upper triangular matrix, then we say that A
has an LU Decomposition of LU.
Theorem 1 If A is a square matrix and it can be reduced to a row-echelon form,
U, without interchanging any rows then A can be factored as A = LU where L is a
lower triangular matrix

We’re not going to prove this theorem but let’s examine it in some detail
and we’ll find a way to determine a way of determining L. Let’s start off by
assuming that we’ve got a square matrix A and that we are able to reduce
it row-echelon form U without interchanging any rows. We know that each
row operation that we used has a corresponding elementary matrix, so
let’s suppose that the elementary matrices corresponding to the row
operations we used are 𝐸1𝐸2 … 𝐸𝑘.
We also know that elementary matrices are invertible so let’s multiply
each side by the inverses

Now, it can be shown that provided we avoid interchanging rows the elementary
row operations that we needed to reduce A to U will all have corresponding
elementary matrices that are lower triangular matrices. We also know from the
previous section that inverses of lower triangular matrices are lower triangular
matrices and products of lower triangular matrices are lower triangular matrices.
In other words,
is a lower triangular matrix and so using this we get the LU-Decomposition for
A of A = LU .
Example 1 Determine an LU-Decomposition for the following matrix and use the
LU-Decomposition method to find the solution to the following system of
equations.

So, first let’s go through the row operations to get this into row-echelon form
and remember that we aren’t allowed to do any interchanging of rows. Also,
we’ll do this step by step so that we can keep track of the row operations that
we used since we’re going to need to write down the elementary matrices that
are associated with them eventually.

And we have got U

Now we need to get L. This is going to take a little more work. We’ll need the
elementary matrices for each of these, or more precisely their inverses. Recall
that we can get the elementary matrix for a particular row operation by applying
that operation to the appropriately sized identity matrix (3´3 in this case). Also
recall that the inverse matrix can be found by applying the inverse operation to the
identity matrix.
Here are the elementary matrices and their inverses for each of the operations
above.

we know can compute L.

We can verify that we’ve gotten an LU-Decomposition with a quick computation
SOLUTION SYSTEM: Now we are going to let’s write down the matrix form of
the system
According to the method outlined above this means that we actually need to
solve the following two systems
and

So, let’s get started on the first one. Notice that we don’t really need to do
anything other than write down the equations that are associated with this
system and solve using forward substitution. The first equation will give us
𝑦1 for free and once we know that the second equation will give us 𝑦2.
Finally, with these two values in hand the third equation will give us 𝑦3 . Here
is that work.
The second system that we need to solve is then,

Again, notice that to solve this all we need to do is write down the equations and
do back substitution. The third equation will give us 𝑥3 for free and plugging
this into the second equation will give us 𝑥2.. etc. Here’s the work for this.

• Computational Science: Tools for a Changing World A High School
Curriculum by Richard A. Tapia and Cynthia Lanius
• numericalmethods.eng.usf.edu/.../mws_gen_sle_txt_gaussian.doc
• LINEAR ALGEBRA, Systems of Equations and Matrices by Paul
Dawkins
• http://ceee.rice.edu/Books/CS/chapter2/linear44.html
• Numerical Methods for Engineers, Fifth Edition, Steven C. Chapra
and Raymond P. Canale.