8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
1/28
Abstract
Precision irrigation based on the “speaking plant” approach can save water and maximize
crop yield, but implementing irrigation control can be challenging in system integration and
decision making. In this paper we describe the design o an adaptable decision supportsystem and its integration with a wireless sensor!actuator network "#$A%& to implement
autonomous closed'loop zone'speci(c irrigation. )sing an ontology or de(ning the
application logic emphasizes system *exibility and adaptability and supports the application
o automatic inerential and validation mechanisms. +urthermore, a machine learning
process has been applied or inducing new rules by analyzing logged datasets or extracting
new knowledge and extending the system ontology in order to cope, or example, with a
sensor type ailure or to improve the accuracy o a plant state diagnosis. A deployment o
the system is presented or zone speci(c irrigation control in a greenhouse setting.
valuation o the developed system was perormed in terms o derivation o new rules by
the machine learning process, #$% perormance and mote lietime. -he eectiveness o the
developed system was validated by comparing its agronomic perormance to traditional
agricultural practices.
/eywords
• #ireless sensor!actuator network0
• I 123.45.6 standard0
• 7ule'based system0
• 8achine learning0
• Adaptive decision'making0
•
Plant'based irrigation
4. Introduction
9iven the advancements in the (eld o wireless sensor networks "#$%s& as well as in the
miniaturization o such sensor systems, new trends have emerged in the (eld o precision
agriculture ":hang et al., 3223 and $rinivasan, 322;&. 7eviews o wireless sensor
technologies and applications in agriculture and ood industry have been given by #ang et
al. "322;& and by 7uiz'9arcia et al. "322
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
2/28
temperature in strawberries, or sugar'levels in grapes, or the photosynthetic activity o the
crop plant, to provide location'speci(c data could also prove to be very eective.
In particular, the use o #$% technology to optimize irrigation in agriculture is o bene(t to
both the armers and the environment. According to recent reports, agriculture irrigation
accounts or 52>;2? o reshwater usage rom sources in the natural environment and up to
more than
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
3/28
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
4/28
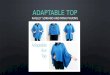
+ig. 4.
igh'level system architecture.
+igure options
-he unctionality o the backend system is supported by the ollowing main
componentsD Ontology ,Decision Support System "DSS&, and Machine Learning "ML&. -he
ontology speci(es all the rules that support the decision'making process in the orm o a
knowledge base. -he J$$ provides all the synthetic inormation, acGuired rom the analysis
o the stored data, needed to make operative decisions or the plant growth management.
-he purpose o the 8K component is to analyze the structured inormation using machinelearning and data mining techniGues in order to (nd interesting new correlations. A number
o tools have also been developed to support the application development.
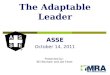
3.3. #$A% platorm and sensor!actuator interacing
-he hardware platorm used is the 35 mm mote developed at -yndall "Lellis et al.,
3225 and -yndall, 3246&. -he hardware platorm is analogous to a KegoM'like
35 mm N 35 mm stackable system "+ig. 3&. -he module contains an Atmel A-8ega431K 1'bit
microcontroller and a @hipcon @@3632 :igLee 7+ chip both o which are combined on one
layer. -he microcontroller is eGuipped with 431 /L in'system *ash memory and can be
programmed to handle analogue to digital conversion "AJ@& o sensor data and the
communication networking protocols or interacing with the 7+ transceiver to achieve
communication with other nodes. -he @@3632 transceiver used is 123.45.6 compliant > and
as such can cover 4; channels in the 3.6 9z band. @urrent consumption is very low with
transmit and receive currents typically 4F.6 mA and 4
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
5/28
35 mm module. n the sotware side, the microcontroller runs a tailored version o -iny$,
an optimised operating system that allows ast con(guration o the sensor nodes. -he power
layer may include batteries or other energy supply or power harvesting mechanisms, i.e.,
solar cells or piezo electric power generation mechanisms. An 35 mm Ki'ion battery layer is
also provided with built'in )$L charger capability. In an early version o the system the
authors have investigated an alternative con(guration o the -yndall35 mote regarding the
communication layer "%ordic K$I n7+3624 3.6 9z 7+ transceiver& and the network
topology "peer'to'peer& "9oumopoulos et al., 322F&.
+ig. 3.
-yndall35 mote modular platorm.
+igure options
2.2.1. Communication protocol an topology
-he communication protocol used in our case is based on the I 123.45.6 standard "I
123.45.6 $tandard, 322;& which speci(es the physical layer and the 8edium Access @ontrol
"8A@& layer o the protocol. I 123.45.6 combined with the :igLee open speci(cation
speciy a protocol stack or the development o short'range and low power communications
or #ireless Personal Area %etworks "#PA%s&. -he basic con(guration o the I 123.45.6
permits a transer rate o 352 /bps to a distance range o 42>422 m in the 3.6 9z
reGuency band depending on the antenna, the environment and the power consumption
permitted by a given application. -he I 123.45.6 standard supports two addressing
schemes, either short "4; bit& or long addresses "I ;6 bit& so theoretical network size is
up to ;55C; or 3;6 nodes. A maximum rame size o 43F bytes is supported with a payload o
up to 446 bytes "assuming short addresses&. An I 123.45.6 network consists o one PA%
coordinator and a set o devices which are classi(ed as reduced unctionality devices "7+J&
and ull unctionality devices "++J&. -he interconnection o these devices allow the creationo three types o topologiesD star "the PA% coordinator is in the transmission range o all
other devices resulting in single'hop communication&, mesh or peer'to'peer "a node may
communicate with any neighbor enabling multi'hop communication& and cluster'tree "a
combination o the previous topologies where the PA% coordinator is the root o the tree and
all the non'lea devices are de(ned as coordinators with the ability to orward the packets
to!rom the root&.
http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0050http://www.sciencedirect.com/science/article/pii/S0168169914000829http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0055http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0055http://www.sciencedirect.com/science/article/pii/S0168169914000829#gr2http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0050http://www.sciencedirect.com/science/article/pii/S0168169914000829http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0055http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0055
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
6/28
-he physical layer o I 123.45.6 uses @arrier $ense 8ultiple Access "@$8A& with @ollision
Avoidance "@A& to access the radio channel "I 123.45.6 $tandard, 322;&. -he 8A@ layer
enables two dierent operational modesD non beacon'enabled mode and beacon enabled
mode. In the ormer case the access control is governed by non'slotted @$8A!@A, where as
in the latter case the network coordinator broadcasts a special rame "a beacon& periodically
that permits the synchronization o the associated devices.
In our current system we use the non'beacon mode and thus our network topology is a star
topology. $electing the non'beacon mode was mandatory due to the unavailability o a
beacon'mode implementation or our #$A% platorm. In the star topology the coordinator
and the actuator controlling motes are powered rom the mains source, where as the sensor
motes are battery powered. 9iven that the plant processes we want to monitor and control
"e.g. plant dehydration& are slow, the use o low sampling intervals "in the order o 5>C2 min&
is acceptable to save energy. In addition, the data to be transmitted is o low complexity
resulting in limited payloads on the I 123.45.6 data rames. A sampling rate o 5 min with
a payload o only 41 bytes "total data rame size CC bytes& gives a sampling rate o 2.11 bps
which is very low compared to the medium transmission rate "352 /bps&. -his low samplingrate aects the collision probability and allows achieving a high successul packet delivery
rate or a suHcient number o nodes provided that nodes can awake in a random manner
during the speci(ed sampling interval to take measurements and transmit their values, as
we will explain in the evaluation part o the sensor network. -he protected environment o
greenhouses provides also the possibility o using a range o acilities like mains power or
certain devices "e.g. controlling o water pumps&. Ly using the star topology we have
avoided well known complications that are related with the use o the beacon'enabled mode
such as clock drits between coordinators in cluster tree topologies, dynamic network
resynchronization in the case a cluster =oins!leaves the network and the need or dynamic
rearrangement o duty cycles in the case o a coordinator ailure.
2.2.2. Sensors
-he interacing o commercial'o'the'shel "@-$& sensors generally reGuires special
hardware or each sensor. -his is because dierent sensors may have dierent power
reGuirements and output type and range. -hree types o sensors had to be interaced or the
-yndall35 moteD soil moisture sensors, humidity sensors and thermistors or determining
lea!air temperature. -he main properties o these sensors are summarized in -able 4.
-able 4.
$ensors interaced to the 35 mm mote.$ensor model @ @'42 $-44 8+5442CC
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
7/28
$ensor model @ @'42 $-44 8+5442CCC2 s 4 s
@urrent
@onsumption
3 mA measuring 2.55 mA measuring 2.21 mA measuring
2.C OA sleep
$upply voltage
range
3.5>5.5 3.6>5.5 3.5>5.5
utput type oltage "42>62? o excitation
voltage&
Jigital "3'wire& 7esistance "414.F>2.;F /V&
@ost 422 W 32 W 5 W "including conditioning
circuitry&
)7K httpD!!www.decagon.com httpD!!www.sensirion.com httpD!!www.cantherm.com
-able options
2.2.2.1. Soil moisture sensor
$oil moisture can be measured by electromagnetic sensors which determine volumetric
water content "#@& and occasionally electrical conductivity in the soil under consideration.
-he correlation between the electromagnetic signals measured and #@ is attributed to the
high permittivity o water which can be inerred by the sensors through various means "e.g.,
time, reGuency and capacitance&. In our case the @ @'42 soil moisture probe by
Jecagon was selected. It uses the capacitance techniGue to measure the dielectric
permittivity o the surrounding medium which can then be related to the #@ o the soil.
-he @ @'42 sensor provides ast measurements with very low power consumption,
giving the ability to take many measurements over a long period o time "e.g., a growingseason& with minimal battery usage. 7egarding the accuracy o the measured #@ the
manuacturer recommends establishing soil'speci(c calibration unctions "@ampbell, 3226&.
-he soil used in our applications was a peat substrate. A series o soil!water mixtures were
used and the corresponding sensor responses were recorded. -he process was perormed or
dierent sensors and the average values o C repetitions were used to obtain the ollowing
eGuationD
http://www.decagon.com/http://www.sensirion.com/http://www.cantherm.com/http://www.sciencedirect.com/science/article/pii/S0168169914000829http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0015http://www.decagon.com/http://www.sensirion.com/http://www.cantherm.com/http://www.sciencedirect.com/science/article/pii/S0168169914000829http://www.sciencedirect.com/science/article/pii/S0168169914000829#b0015
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
8/28
eGuation"4&
-urn 8athXaxon
$oil moisture sensor outputs could be input directly into the analogue to digital converter
because they are in the voltage range o the microcontroller.
2.2.2.2. Humidity sensor
+or measuring humidity we have selected the $-44 component rom $ensirion which also
provides temperature measurements. A capacitive sensor element is used or measuring
relative humidity while temperature is measured by a band'gap sensor. -he device also
integrates signal processing and provides a ully calibrated digital output. -o obtain the
relative humidity we used the accuracy enhancement ormula that is provided by the
manuacturer "$ensirion, 3244&D
eGuation"3&
-urn 8athXaxon
where SO!" is the humidity readout value "43'bit length&, C4 Y Q3.26;1, C3 Y 2.2C;F
andCC Y Q4.5
8/15/2019 Automated zone specific irrigation with wireless sensor actuator network and adaptable decision support.doc
9/28
a nominal resistance o 42 kV at 35 R@ "@antherm, 322;&. -he measurement system we
have designed achieves a temperature resolution o 2.23 R@ and an accuracy o U2.25 R@
over a temperature range o 5>65 R@. -he resolution and accuracy o temperature
measurement is critical or the precision irrigation application we developed and thereore
we have careully designed the corresponding system. 8oreover, higher resolution and
accuracy are reGuired or the machine learning experiments that will be described later in
the paper.
A characteristic o thermistors is the non'linear relationship between thermistors resistance
"!th& measured in ohms, and temperature "# & measured in /elvin, as given by the well'known
$teinhart>art thermistor eGuation or the simpler L'parameter eGuationD
eGuation"C&
-urn 8athXaxon
where !2 is the resistance value at reerence temperature # 2 "typically 35 R@!3# curve "the higher the Leta
value the greater the change in resistance per degree @&. Loth !2 and $ are speci(ed in the
sensor data sheet.