Embed Size (px)
Citation preview

ORIGINAL PAPER
Xianwu Ling � H. P. Cherukuri � R. G. Keanini
A modified sequential function specification finite element-basedmethod for parabolic inverse heat conduction problems
Received: 24 October 2003/ Accepted: 18 April 2004 / Published online: 25 January 2005� Springer-Verlag 2005
Abstract A method for enhancing the stability ofparabolic inverse heat conduction problems (IHCP) ispresented. The investigation extends recent work onnon-iterative finite element-based IHCP algorithmswhich, following Beck’s two-step approach, first derives adiscretized standard form equation relating the instan-taneous global temperature and surface heat flux vectors,and then formulates a least squares-based linear matrixnormal equation in the unknown flux. In the presentstudy, the non-iterative IHCP algorithm is stabilizedusing a modified form of Beck’s sequential functionspecification scheme in which: (i) inverse solution timesteps, Dt; are set larger than the data sample rate, Ds; and(ii) future temperatures are obtained at intervals equal toDs: These modifications, contrasting with the standardapproach in which the computational, experimental,and future time intervals are all set equal, are designedrespectively to allow for diffusive time lag (under thetypical circumstance where Ds is smaller than, or on theorder of the characteristic thermal diffusion time scale),and to improve the temporal resolution and accuracy ofthe inverse solution. Based on validation tests using threebenchmark problems, the principle findings of the studyare as follows: (i) under dynamic surface heating condi-tions, the modified and standard methods provide com-parable levels of early-time resolution; however, themodified technique is not subject to over-damped esti-mation (as characteristic of the standard scheme) andprovides improved error suppression rates, (ii) the pres-
ent method provides superior performance relative to thestandard approach when subjected to data truncationand thermal measurement error, and (iii) in the nonlineartest problem considered, both approaches provide com-parable levels of performance. Following validation, thetechnique is applied to a quenching experiment andestimated heat flux histories are compared againstavailable analytical and experimental results.
Keywords Heat conduction Æ Inverse methods ÆHeat transfer coefficient Æ Finite element method ÆSequential function specification
Nomenclature
a temperature coefficient in linear expansionsfor k and c;Test Case 3
A; B; C; D coefficient matrices in standard form equa-tion
c specific heatcðmÞ global vector produced by condensation,
evaluated at the mth future timef global force vectorfðmÞ global force vector evaluated at the mth
future timeh; hnþ1 estimated instantaneous convective heat
transfer coefficientk thermal conductivityK global stiffness matrixL thickness of test specimen; depth of
embedded temperature probeM global mass matrixNi ith interpolation functionn surface unit normalqc magnitude of impulsively imposed heat flux
(Test Case 1)qþ dimensionless estimated surface heat flux
ð¼ qn=qcÞq global vector of surface heat fluxes
~qnþ1 heat flux parameter vector evaluated at tnþ1
Comput Mech (2005) 36: 117–128DOI 10.1007/s00466-004-0644-3
R. G. Keanini (&)Mechanical Engineering, UNC-Charlotte,9201 University City Blvd,Charlotte, NC 28223-0001, USATel.: 704-687-4158Fax: 704-687-2352E-mail: [email protected]
X. Ling � H. P. Cherukuri � R. G. Keanini (&)Department of Mechanical Engineering and Engineering ScienceThe University of North Carolina at Charlotte Charlotte,NC 28223-0001, USA

r number of future times used in the stan-dard method ½ðr � 1Þb ¼ R�
R number of future times used in presentmethod
Snþ1 instantaneous least square error norm (attnþ1Þ
t timetþ dimensionless time ð¼ at=L2Þdt computational time step (for inverse solu-
tion)dtþ dimensionless computational time step
ð¼ adt=L2Þdtf future time step sizetðmÞ the mth future timeUðmÞ global matrix in standard form equation
ð¼ ½Mþ DtðmÞK��1Þx x-coordinatexþ dimensionless x-coordinate ð¼ x=LÞu Kirchoff transformation variable, Test
Case 3X position vectorXðnþ1Þ sensitivity matrix, evaluated at tnþ1~YðmÞ vector of measured temperatures, obtained
at future time tðmÞa thermal diffusivityb time-scale multiplication factor ð¼ Dt=DsÞC1; C2 surface regions where temperature and heat
flux boundary conditions are applied,respectively
Ce finite element boundaryh computed temperature fieldh1 ambient temperatureho initial temperature distribution~hðmÞ vector of computed measurement site
temperatures, obtained at future time tðmÞq densityDs sample time stepDsþ dimensionless sample time step ð¼ aDs=L2ÞsD thermal diffusion time scale between
surface and embedded probe
Superscripts and overhead marks
ðmÞ future time indexn; nþ 1 time indicesþ dimensionless quantity~� reduced global matrix
Subscripts
o property evaluated at reference temperature ho
1 Introduction
The classical inverse heat conduction problem (IHCP)uses one or more temperature measurements taken fromthe interior of a body to estimate an unknown, typically
time-varying surface heat flux distribution. The problemarises in a variety of applications, some of the moreinteresting of which are highlighted by Beck et al. [1] andOzisik and Orlande [2]. Over approximately 40 years ofdevelopment, numerous methods have been proposedfor treating the IHCP; comprehensive reviews of theliterature can be found in Beck et al. [1], Ozisik andOrlande [2], Tikhonov and Arsenin [3], Kurpisz andNowak [4], Hensel [5], Murio [6], and Alifanov [7].Applications, illustrating a variety of methods, are pre-sented in Zabaras et al. [8], Delaunay et al. [9], Wood-bury et al. [10], and Orlande at al. [11].
This article continues and extends recent work [12] onnon-iterative methods for the IHCP. The techniquedeveloped in the first study, applicable to a broad classof parabolic inverse heat transfer problems in which asurface heat flux (or temperature) history is sequentiallyestimated given a known initial thermal state and limitedsubsequent thermal measurements, was guided by ageneric, two-part strategy first described by Beck et al.[1]. In Beck’s approach, the direct heat transfer model(describing conductive heat transfer in the body ofinterest) is used to first derive a linear (or in nonlinearproblems, a quasilinear), discretized system of equationsrelating the instantaneous global temperature vector,hnþ1; to the instantaneous vector of unknown surfaceheat fluxes qnþ1: The resultant standard form equation,which can be stated in generic form as
A _hþ Bh ¼ CqþD ð1Þ
can in principle be derived for sequential finite element,finite difference, finite volume, and boundary element-based inverse methods (where the latter can only be usedin linear problems), and where the system matrices A; B;C; and D are determined by the discretization methodused. Once the standard form equation is obtained, thesecond step in Beck’s approach requires explicit leastsquares-based minimization of an error measure, S;between computed and measured temperatures. Mini-mization then leads directly to a linear (or quasilinear)matrix normal equation in the unknown instantaneoussurface flux distribution [1].
Although Beck’s method of parabolizing the inverseproblem via the standard form and matrix normalequations is well-studied, and while Beck et al. [1] havepresented a specialized treatment appropriate to linear,one-dimensional problems in planar geometries(encompassing most of the discretization methodsmentioned above), to the authors’ knowledge, a detailedimplementation appropriate to multidimensional non-linear problems had not been reported prior the work inLing et al. [12].
The advantages associated with Beck’s approach arenumerous:
i) The method is non-iterative, transforming the in-verse problem into a hybrid initial value problem inwhich the initial condition is known and theinstantaneous surface flux boundary condition is
118

sequentially estimated via the matrix normal equa-tion, based on measured data. The method thusoffers an efficient alternative to the relativelyexpensive iterative approaches that presently dom-inate the field (see, e.g., [2,4]).
ii) The sensitivity matrix, Xðnþ1Þ; which plays a centralrole in many IHCP solution algorithms [1,2,4], canbe explicitly determined, where in the finite element-based approach, for example, matrix elements ofXðnþ1Þ are formed using elements of the global massand stiffness matrices as well as area integralsassociated with the global force vector. (See below.)This feature, which follows as a consequence ofhaving obtained an explicit standard form equation,circumvents expensive solution of boundary valueproblems governing Xðnþ1Þ or numerical evaluationof the derivatives comprising Xðnþ1Þ [2].
iii) As described by Beck et al. [1], the method canincorporate any of the discretization schemes men-tioned above.
iv) As also noted by Beck [1] and as demonstrated byLing et al. [12], the method can be formulated forapplication to nonlinear, multidimensional inverseproblems. [Note, the method developed in [12] is anonlinear, multidimensional formulation, but wasapplied to a linear, one-dimensional benchmarkproblem and to a nonlinear, one-dimensionalexperimental problem].
The purpose of the present study is to investigate a simplemethod for stabilizing solutions of parabolic inverse heatconduction problems. In particular, a modified form ofBeck’s sequential function specification method is pro-posed in which computational, experimental, and futuretime intervals are allowed to differ. The investigation ismotivated by three principle questions.
(i) Preliminary results reported by Keanini [13] suggestthat choosing the computational time step, Dt; lar-ger than the sample interval, Ds; improves inversesolution stability. Under the typical circumstancewhere the sample interval is shorter than the char-acteristic thermal diffusion time scale, sD [betweenthe heated surface and the thermal measurementlocation(s)], it is clear that due to diffusional timelag, Dt should be chosen larger than Ds:While Becket al. [1] have demonstrated the stabilizing effects ofincreased computational time step size relative to sD(using equal computational, sample, and future timestep sizes), a detailed examination of the potentialstabilizing effects of increased computational stepsize relative to sample interval size apparently hasnot been undertaken.
(ii) Investigators using the sequential function specifi-cation method have, without apparent exception,obtained future temperatures at time intervals equalto the computational time step, Dt: Based on thesimple notion that increased thermal informationcan be obtained (and solution stability thus im-proved) by incorporating future temperatures at the
typically smaller experimental sample interval, wewill also investigate the potentially stabilizing effectof this approach.
iii) The method developed by Ling et al. [12], whileproviding a general finite element-based formula-tion of Beck’s two-step strategy, in effect used exactmatching of computed and measured temperatures.Since exact matching is prone to solution instability[1,4], a simple, non-iterative, stand-alone methodfor enhancing solution stability was sought. Al-though Tikhonov regularization [3] superficiallymeets these criteria, the method in fact requires apriori specification of both the regularizationparameter and the form of the regularization term.By contrast, it appears that a modified functionspecification approach in which future temperaturesare obtained at the relatively short experimentalsample interval provides an objective, physically-based alternative to Tikhonov regularization. Spe-cifically, the standard assumption [1] that the sur-face flux remains constant over the total future timeinterval, RDtf ; is likely well met for small to mod-erate R since on this time scale (which is on theorder of the measurements’ temporal resolution),the detectable flux does remain essentially constant.(Here, R is the number of future times and Dtf isthe future time interval).
In overview, the FEM-based algorithm developed in[12] is first briefly described, with formulation of thestandard form equation highlighted; a description ofthe solution, experimental, and future time intervals isgiven in the course of this development. Using theproposed modified function specification method, theassociated matrix normal equation is then derived. Themethod is then validated against three well knownexample problems, designed respectively to test theability of the technique to reconstruct rapidly changingsurface fluxes, adapt to data truncation error andmeasurement error, and to solve nonlinear problems.Once validated, the technique is used to investigatesurface heat transfer during experimental quenching ofcircular cylinders.
2 Inverse method formulation
2.1 Standard form equation
The initial-boundary value problem governing conduc-tive heat transfer in the region of interest, X; is given by:
r � krhð Þ ¼ qcohot; ð2Þ
subject to the boundary conditions
h ¼ h1 on C1 ð3Þand
krh � n ¼ q on C2; ð4Þ
119

where X is bounded by C ¼ C1 [ C2; and where C1 is theportion of the boundary subject to known temperatureand/or heat flux conditions, and C2 is the portion of theboundary on which thermal conditions are unknown.For simplicity, we assume that only temperatures arespecified on C1: The initial condition is
hðX; 0Þ ¼ h0ðXÞ; ð5Þwhere X ¼ ½x; y; z�. In general, q, c and k are tempera-ture-dependent, while q is dependent on time and space.
The direct problem defined by (2)– (5) is solved usingthe Galerkin finite element method, where the resultingsystem of equations is given by
Mþ DtKð Þhnþ1 ¼Mhn þ Dtf nþ1; ð6Þand where components of the element capacity andstiffness matrices are given by
Meij ¼
ZXe
qcNiNjdX ð7Þ
Keij ¼
ZXe
kNi;kNj;kdX: ð8Þ
Note that Xe is the element area, Ni is a finite elementinterpolation function, and summation over k (=1, 2, 3for three-dimensional problems) is implied. Further,Dt ¼ tnþ1 � tn denotes the computational time step.
Here, the implicit, one-step, Euler backward-differencemethod is employed. It is important to note that in non-linear problems where temperature variations are largeenough to induce significant thermophysical propertyvariations, quasilinearization [1] is used to evaluateM andK. Thus, the magnitudes of q, c , and k at the current timestep are evaluated using the temperature solution, hn,from the previous time step. In all cases, superscripts onMand K are suppressed for clarity. Components of the ele-ment force vector are given by
f ei ¼
ZCe
NiqdC; ð9Þ
where Ce is the element boundary and where the timeindex has again been suppressed.
2.1.1 Computational, experimental, and future time steps
Prior to proceeding, it is necessary to define the varioustime steps and intervals that will be used in developingthe standard form equation and inverse algorithm. Inthe development to follow, inverse solutions will beobtained at discrete times tnþ1 ¼ ðnþ 1ÞDt; where againDt is the computational time step. In order to circumventsolution instability, the computational time step,Dt ¼ tnþ1 � tn, is chosen to be larger than the experi-mental sample interval, Ds:
Dt ¼ bDs; ð10Þwhere b is a positive integer. As mentioned, this choice,dictated by the fact that Ds is typically smaller than the
characteristic thermal diffusion time scale, sD ¼ L2=a;allows for diffusional time lag between the surface C2
and the sensors located at a characteristic depth L. [Aminimum bound on the magnification factor, b; can beestimated by first recognizing that the computationaltime step must, at minimum, be on the order of sD; i.e.,Dtjmin � sD: Thus, bmin ¼ Dtjmin=Ds � sD=Ds; choosingvalues of b larger than bmin ensures that the computa-tional time step is a larger-than-unity multiplier of thediffusion time scale].
Considering formation of the instantaneous leastsquares norm and subsequent formulation of the matrixnormal equation (see Sect. 2.2 below), sets of measuredand computed temperatures will be obtained at thecurrent time, tnþ1ð¼ tð0ÞÞ, and at R subsequent or futuretimes, tð1Þ; tð2Þ; . . . ; tðRÞ, where tðmÞ is related to tnþ1 by
tðmÞ ¼ tnþ1 þ mDs; ð11Þ[As a point of comparison, the mth future temperature inthe standard approach is given by tðmÞ ¼ tnþ1 þ mDt:Note too that while all of the data used in an inversesolution procedure is typically obtained prior toattempting a solution, in the special case where real-timeor near real-time inverse solutions are sought, thecomputed solution at tnþ1 must lag data acquisition by atime interval determined by the number of future mea-sured temperatures used].
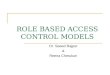
An illustration of the various time scales and intervalsto be used is given in Fig. 1 for the case where b ¼ 2 andR ¼ 4.
2.1.2 Standard form equation
We now generalize our earlier approach [12] and express
the global force vector at future time tðmÞ as
fðmÞ ¼ ~D~qnþ1 þ cðmÞ; ð12Þwhere ~qnþ1 is the vector of parameters describing theinstantaneous global surface heat flux vector qnþ1 on C2;cðmÞ is a vector produced by condensation (as determinedby the primary boundary conditions on C1Þ; and whereelements of ~D, given by
n+1 n+2 n+3 n+4n
(0) (1) (2) (3) (4)
Experiment
Computation
Future
Time
Fig. 1 An illustration of the time steps
120

~DPk ¼of ðmÞP
o~qnþ1k
; ð13Þ
are constants determined by the finite element discreti-zation. See [12] for further details. Eq. (12) is of centralimportance in our development since it allows derivationof the linear matrix normal equation in ~qnþ1: Indeed, Eq.(12) represents the finite element embodiment of Beck’sfunction specification method [1] where, in the presentcase, the unknown flux at R future times is temporarily setequal to the flux at tnþ1. Note, in Eq. (13) that the uppercase subscript P refers to a global node number, while thelower case subscript k refers to the local index over the Kmembers of ~qnþ1. (See [12] for further details.)
The explicit, FEM-based standard form equation,appropriate for use in the modified function specifica-tion scheme, is finally obtained by inverting the gov-erning Eq. (6), i.e.,
hðmÞ ¼ UðmÞMhn þ DtðmÞUðmÞfðmÞ ð14Þwhere UðmÞ ¼ ½Mþ DtðmÞK��1, fðmÞ is given by (12), andwhere DtðmÞ ¼ tðmÞ � tn. In our case, DtðmÞ ¼ Dt þ mDs.
2.2 Matrix normal equation
Having obtained the standard form equation, we cannow derive the associated matrix normal equation. Theunknown instantaneous flux distribution, parameterizedby the vector ~qnþ1, is determined by first minimizing aninstantaneous least squares norm, Snþ1, with respect to~qnþ1; where Snþ1 is given by
Snþ1 ¼XR
m¼0
~YðmÞ � ~h
ðmÞ� �T~YðmÞ � ~hðmÞ
� �: ð15Þ
Here, ~YðmÞ
and ~hðmÞ denote respectively, sets of measuredand computed temperatures, obtained at correspondinglocations within the body, at time tðmÞ: The set of com-puted measurement site temperatures,
~hðmÞ; follow from
(14):
~hðmÞ ¼ ~UðmÞ
Mhn þ DtðmÞ ~UðmÞ
fðmÞ ð16Þwhere elements of ~U
ðmÞare related to those in UðmÞ by
~U ðmÞiP ¼ U ðmÞGP , and where the local index i (spanning the Imeasurement sites) maps to the corresponding globalnode G. Note that the reduced matrix ~U is of dimensionI � N . We again emphasize that although ~Y
ðmÞand ~hðmÞ
are generally obtained at time intervals equal to Dt [1],we obtain these sets at the shorter experimental mea-surement interval, Ds:
Minimization of Eq. (15) with respect to the membersof ~qnþ1 leads to
XR
m¼0½~XðmÞ�T ½~YðmÞ � ~hðmÞ� ¼ 0 ð17Þ
where ~XðmÞ
is the sensitivity matrix of dimension I � K,and where elements of ~X
ðmÞ, given by
~XðmÞik ¼
o~hðmÞi
o~qnþ1k
; ð18Þ
represent the temperature response at measurement site iand time tðmÞ with respect to the kth instantaneous heatflux parameter on C2.
Given (18), (12) and (16), we first express the sensi-tivity matrix, ~X ðmÞ, in explicit form:
~X ðmÞ ¼ DtðmÞ ~UðmÞ ~D ð19Þ
Finally, introducing (16) and (19) into (17), we obtainthe linear matrix normal equation in ~qnþ1:
XR
m¼0
~XðmÞT ~X
ðmÞ !
~qnþ1 þ
XR
m¼0
~XðmÞT
� ~UðmÞ
Mhn þ gðmÞ � ~YðmÞ� �¼ 0; ð20Þ
where gðmÞ ¼ DtðmÞ ~UðmÞ
cðmÞ. This important result,extending the method developed in [12], represents thefinite element-based matrix normal equation, stabilizedvia the modified function specification method (where theversion in [12] is obtained by setting R ¼ 0 in Eq. (20)).
2.3 Inverse algorithm
Based on the preceding development, an algorithm forthe inverse solution is proposed as shown in Table 1.
Refer to [12] for further discussion and a detailedillustration of the basic algorithm.
3 Validation tests
In this section, the above developed inverse method isvalidated against three example problems originallyproposed by Beck [1, 14,15]. In all three problems, a flatplate heated at x ¼ 0 and insulated at x ¼ L is consid-ered. In the first problem, a surface heat flux is imposedat x ¼ 0 and t ¼ 0; and is then maintained constant intime. In the second case, the heat-flux is assumed to varywith time in a triangular fashion. The third case issimilar to the first with the exception that thermal con-ductivity and specific heat are taken to be functions oftemperature, thus making the problem nonlinear.
Exact solutions for all three problems are used tosimulate experimental data. The performance of theproposed algorithm is then examined, and the resultscompared against those predicted by Beck’s analyses.For purposes of comparison with Beck’s results, we use
Table 1 Proposed inverse algorithm
Given hn; ~YðmÞ; M; K; and cðmÞ:
1. determine ~qnþ1 using Eq. (20);
2. calculate fnþ1ð¼ fð0ÞÞ using Eq. (12);
3. determine hnþ1ð¼ hð0ÞÞ from Eq. (14);4. increment the time index and return tostep (1).
121

nondimensional quantities in the discussion below. Itshould be noted that r, denoting the number of futuretimes in Beck’s work, is related to R, the number offuture times in the present work, via the relation
ðr � 1Þb ¼ R ð21ÞIn other words, the time difference between the largestfuture time [which equals RDs here and ðr � 1ÞDt ¼ðr � 1ÞbDs in Beck’s work] and the current time, tnþ1; isthe same in both approaches. In the comparisons to bedescribed, the values of r reported by Beck will thusdetermine a corresponding value of R:
3.1 Case 1: Step change in surface heat flux at x ¼ 0
The first case is designed to test the ability of the inversemethod to reconstruct rapid changes in surface heat flux.Consider the flat plate shown in Fig. 2, where the plate,insulated at x ¼ L; is subjected to a step-up in heat-fluxfrom 0 to qc; at x ¼ 0; t ¼ 0:
The exact solution in nondimensional terms is givenby [1]:
hþðxþ; tþÞ ¼ tþ þ 1
3� xþ þ 1
2ðxþÞ2
� 2
p2
X1m¼1
1
m2e�m2p2tþ cosðmpxþÞ
ð22Þ
where
hþ ¼ h� h0qcL=k
; tþ ¼ atL2; xþ ¼ x
L:
Here, h0 is the initial temperature, and k and a are thethermal conductivity and thermal diffusivity, respec-tively. Simulated noise-free experimental temperaturedata is generated from Eq. (22) at xþ ¼ 1 (correspondingto the insulated surface), at time intervals Dsþ ¼ 0:01:The nondimensional surface heat flux qþ ¼ qn=qc; isthen estimated (at x ¼ 0Þ using two different computa-tional time steps, Dtþ ¼ 0:05 and ¼ 0:5, with the corre-sponding results shown in Figs. 3 and 4. For purposes ofcomparison, the results obtained by Beck et al. [1] usingthe standard function specification method in combi-nation with a Duhamel integral solution of the directproblem are also shown.
Considering the results shown in Figs. 3 and 4, anumber of observations can be made. Examining firstthe results obtained by exact matching of computed andexperimental temperatures (R=0; r=1) [1], we see thatthe estimated flux obtained by the present methodexhibits a large initial overshoot whose magnitude de-creases with increasing step size, Dtþ: This feature can beexplained as follows. When Dtþ is small, the dimensionaltime increment Dt is much smaller than the diffusive timescale ðsD ¼ L2=aÞ; the initial temperature response attþ ¼ Dtþ and xþ ¼ 1 is thus suppressed and the corre-sponding predicted heat flux, qþðDtþÞ; underestimated.At the next time step ðtþ ¼ 2DtþÞ; however, the tem-perature response (at xþ ¼ 1Þ increases, so that due toboth energy conservation and the underestimated flux attþ ¼ Dtþ; the corresponding flux estimate overshoots theactual value. This process of energy conservation-drivencompensation for under- and over-estimated surfaceheat fluxes continues until the estimated flux begins toapproach the actual value. The magnitude of the over-shoot decreases with increasing Dtþ due to an increasinginitial temperature response at tþ ¼ Dtþ and xþ ¼ 1. Incontrast, the solution obtained by the standard functionspecification approach (using Dtþ ¼ 0:05Þ becomes un-bounded soon after the initiation of heating. As dis-cussed by Beck et al. [1], this result reflects acombination of solution sensitivity to exact matchingFig. 2 Square insulated plate subjected to a step-up in heat-flux
-0.2 0 0.2 0.4 0.6 0.8 1 1.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
R=0R=5R=10R=25
-0.2 0 0.2 0.4 0.6 0.8
0
0.2
0.4
0.6
0.8
1
r=1
r=6r=3r=2
(a) Results from the present method (b) Beck's function specification method
Fig. 3 Calculated surface heatflux for constant qc input toa plate. Exact temperature data,Dtþ ¼ 0:05, b ¼ 5
122

between the solution and data, and use of a time stepthat is too small relative to sD. Note that Beck’s singlefuture time step solution (r=1), which in reality corre-sponds to Stolz’s solution [1, 16], stabilizes at the largertime step, Dtþ ¼ 0:5.
The effect of adding future temperatures is apparentin Figs. 3 and 4 - both sets of solutions become smootheras R and r are increased. Notice, however, that while thesolutions obtained by the present method rapidly ap-proach the exact solution for both time steps and at allvalues of R; Beck’s solutions, particularly those usingDtþ ¼ 0:5; exhibit early-time damping, an effect thatbecomes increasingly pronounced and extended as r in-creases. [Here, damping refers to estimates that remainless than the actual value.] Scale analysis of the matrixnormal Eq. (20), expressed in the abbreviated formA~q
nþ1 ¼ b; reveals the cause of overdamping: at earlyfixed times, the ratio kbk=kAk; indicating the approxi-mate magnitude of ~qnþ1; becomes smaller with increas-ing r: Importantly, based on the results in Figs. 3 and 4,we observe that the modified function specificationmethod provides improved stability and reducedover-damping compared to the standard approach. Notefinally the intuitively reasonable result that for bothmethods, early-time resolution of the unknown surfaceflux decreases with increasing time step size, Dtþ:
3.2 Case 2: Triangular surface heat flux at x ¼ 0
The second test case, designed to assess the inversemethod’s performance when subjected to data truncationerror [14] and random measurement error [1], is shown inFig. 5. The insulated plate is subjected to a triangular heatflux at xþ ¼ 0; with the exact solution given in [1]. Tem-peratures obtained from the solution at the insulated endat nondimensional time intervals of 0:02 are again takento be the exact experimental temperature data.
Considering first the effects of data truncation error,we follow Beck [14] and simulate this type of error bytruncating the exact solution after the third decimalplace. Specifically, using the measurement time intervalDsþ ¼ 0:02; we set the nondimensional temperature atxþ ¼ 1 equal to 0:000 for tþ ¼ 0:02 � i; i ¼ 1; 2; . . . ; 7;and equal to 0:001 for tþ ¼ 0:16. Exact temperatures atsubsequent time intervals are then truncated to three
0 1 2 3 4 5 6 7 8 9 -2 -1 0 1 2 3 4 5 6 7 8 90.9
1
1.1
R=0
R=250R=100R=50
0
0.2
0.4
0.6
0.8
1
r=1
r=6r=3r=2
(a) The Present Method (b) Beck's function specification method
Fig. 4 Calculated surface heatflux for constant qc input toa plate. Exact temperature data,Dtþ ¼ 0:5, b ¼ 50
Fig. 5 Square plate subjected to a constant heat-flux and insulated atthe other end
0 0.2 0.4 0.6 0.8 1 1.2-1.5
-1
-0.5
0
0.5
1
1.5
Fig. 6 Calculated heat flux for case 2 with measurement errorsintroduced by truncation of the exact temperatures. Dsþ ¼ 0:02
123

decimal places. Compared with actual temperatures,experimental temperatures for tþ � 0:16 are in error byas much as 100%.
The surface heat flux at xþ ¼ 0; predicted by thepresent method and also by Beck’s analysis [14], areshown in Fig. 6. The results correspond to the case whentwo future temperatures are used ðR ¼ r ¼ 2Þ; withDtþ ¼ 0:04. [For convenience, we follow Beck [1] andrefer to current temperatures, corresponding to r ¼ 1, asfuture temperatures]. It is clear from the figure that thepredictions generated by the present approach agree wellwith the exact solution, whereas Beck’s solution ðr ¼ 2Þexhibits significant instability. Predictions obtained bythe present technique at a smaller computational timestep, Dtþ ¼ 0:02, are also shown. For this time step,oscillations in the estimated flux become more pro-nounced, though still not as large as those accompany-ing Beck’s solution. It is thus apparent that for this testcase, data truncation errors do not significantly affectthe algorithm’s ability to accurately reconstruct theprescribed surface flux.
Computed surface temperatures at xþ ¼ 0:0; corre-sponding to the estimated fluxes in Fig. 6 (whereR ¼ r ¼ 2Þ; are shown in Fig. 7. Again, results obtainedby the present method are in good agreement with theexact solution, and significantly less oscillatory than thepredictions generated by the standard approach.
Although not shown, it is worth noting that the solu-tion obtained by the presentmethod using exactmatchingðDtþ ¼ 0:04; R ¼ 0Þ remains bounded, though oscilla-tory. However, the oscillations remain smaller than thoseaccompanying Beck’s two-future-time solution ðr ¼ 2;Dtþ ¼ 0:04Þ. By contrast, the single-future-time solutionðr ¼ 1Þ becomes unbounded for Dtþ ¼ 0:04.
Considering next the effects of measurement uncer-tainty, we follow Beck et al. [1] and use the same sim-ulated random temperature signal that was used in theirtests. In particular, simulated noisy temperature mea-surements, generated by adding a normally distributedrandom component to the exact solution at xþ ¼ 1:0ðDtþ ¼ 0:06Þ; are taken directly from Table 5.3 in [1].The resulting surface heat flux estimates, correspondingto Dtþ ¼ 0:06; R ¼ 2; and r ¼ 3; are shown in Fig. 8.Close examination of the figure reveals that the solutionobtained by the modified method is less oscillatory andsomewhat more accurate than that obtained by thestandard approach, particularly near the peak flux.
3.3 Case 3: Temperature dependent thermal properties
Here we consider a nonlinear problem studied by Becket al. in [15]. As in the first example, a flat-plate,insulated at xþ ¼ 1; is subjected to a step-up in heat fluxat tþ ¼ 0. However, the thermal conductivity and spe-cific heat are now assumed to depend linearly on tem-perature according to
k ¼ k0 1þ ahð Þ c ¼ c0 1þ ahð Þ: ð23Þwhere a is a constant, and k0 and c0 are the thermalconductivity and specific heat, respectively (evaluated ata reference temperature, h0Þ; as given in [15],ko ¼ 74:24 Wm�1K�1; co ¼ 447 Jkg�1K�1; and a ¼0:00086 K�1; representative of Armco iron atho ¼ 300 K: Note, due to the use of the same tempera-ture coefficient, a; in both property relationships in Eq.(24), these expressions are idealizations simply designedto capture the nonlinear effect produced by temperature-
0 0.2 0.4 0.6 0.8 1 1.20
0.1
0.2
0.3
0.4
0.5
0.6
Exact
Beck’s method
Present method
Fig. 7 Calculated surface temperature (xþ ¼ 0) using R ¼ r ¼ 2;Dtþ ¼ 0:04; and Dsþ ¼ 0:02
0 0.2 0.4 0.6 0.8 1 1.2
0
0.2
0.4
0.6
exact
R=2
r=3
Fig. 8 Calculated heat flux for triangular heat flux with random errorintroduced into the simulated measurement data. Dsþ ¼ 0:06
124

dependent thermal properties [15]. Note too that there isno pre-specified limit on the temperature h; as indicatedby the exact solution to the corresponding linear prob-lem, Eq. (22), and more to the point, as dictated by thephysics of the problem, the temperature will continuerise with time, at least until the melting temperature isreached.
Using the Kirchoff transformation, defined by
uðxþ; tþÞ ¼Z h
0
ð1þ ah0Þdh0 ¼ hþ ah2
2; ð24Þ
the transient nonlinear heat conduction problem can berecast into a linear problem in the variable u [15]. Thelinear problem has a known exact solution that isidentical to Eq. (22), with hþ replaced by uðxþ; tþÞ.
The simulated measured temperature data is obtainedat xþ ¼ 0:1 from the exact solution using Dsþ ¼ 1:0.Note that, unlike the previous two test problems,the sensor is located in the interior of the plate.The dimensionless time step is thus based on the dis-tance, xs; from the exposed surface to the sensor loca-tion; that is, Dsþ ¼ aDs=x2s .
In Fig. 9, the relative error between the estimated andactual heat flux is plotted against the time index. Again,an overshoot is seen at the beginning of the calculation.The solution then quickly converges to the exact value ofunity, and for a time index up to 1000 (the largest tes-ted), remains unchanged. As in example 1, it is alsofound that the initial overshoot can be considerablysuppressed if a large number of future temperatures areused. Results obtained by the standard function speci-fication method for a time index greater than 20 are notavailable. However, for a time index less than 20, the
relative errors for both methods are found to be of thesame order.
4 Application to quenching problems
4.1 Experiments
Estimation of the surface heat flux during quenching ofsolid bodies represents a challenging task for inverseheat transfer algorithms. The nature of the heat transferprocess at the interface between the quenchant and thepart being quenched is extremely complex. For sim-plicity, the process can be conceptualized as occurring inthree stages. In the initial stage when the part tempera-ture is extremely high, a vapor blanket rapidly formsaround the part. Depending on the part size, quenchantproperties, latent heat of vaporization and ambientpressure, the blanket can persist or quickly collapse.Once the blanket collapses, heterogeneous, turbulenttwo-phase (nucleate boiling) heat transfer sets in (stage2), and eventually gives way to single-phase naturalconvection (stage 3). The cumulative effect of theseprocesses is a surface convective heat transfer coefficientthat varies in a complex fashion with time.
In this section, we re-analyze the experiment reportedin [12] where a metallic cylinder was quenched in oil andthe associated interior temperature was measured intime. In particular, the proposed inverse method is usedto estimate the time-varying surface heat flux from thecylinder. Surface heat flux predictions are then com-pared with analytical results due to Burggraf [17] and, asin [12], associated heat transfer coefficients are comparedagainst those estimated by Bodin et al. [18] in an inverseanalysis of a similar experiment.
The quenching experiments were performed using aDrayton Quenchalyzer [19]. As described in [12], anInconel 600 metal cylinder, having a thermocouple at itsgeometric center, was heated in a furnace to a prespec-ified temperature, h0 ¼ 850oC. See Fig. 10. Once asteady temperature was achieved, the cylinder wasquickly transferred to a stagnant oil bath at h1 ¼ 40oC.Throughout, transient temperature changes at the centerof the probe were acquired and stored by a computerizeddata acquisition system, sampling at a rate of 8 Hz(Ds ¼ 0:125), for a period of 60 seconds. [Note that thethermal diffusion time scale, sD; between the surface andthermocouple was approximately 9.3 s.]
0 50 100 150 200 250 300-1
0
1
R=2
Fig. 9 Surface heat flux using exact temperature data when thematerial properties depend on temperature. Dsþ ¼ 1:0
30 30
30°
6
9.513 1.5
Fig. 10 A schematic of the probe used in experiments. All dimensionsare in mm
125

4.2 Burggraf’s analysis
Since the ratio of the probe’s half length to its radius isaround 5, it suffices to model the probe as a long solidcylinder and to neglect the influence of end heat fluxes.Thus, the problem reduces to finding the instantaneoussurface heat flux for an infinitely long solid cylinder,where the temperature variation is only along the radius.Burggraf [17] presented one of the first analytic solutionsto this problem using a series solution to the linear in-verse problem. According to his solution, the heat flux isgiven by
q ¼ kX1m¼1
mR2m�1o
22m�1 m!ð Þ2am
dmYdtm
: ð26Þ
where Y is the surface temperature, and Ro is the radiusof the cylinder. For computational purposes, the series istruncated at m ¼ 5; derivatives are replaced by centereddifferences, and the time-varying temperature at thecenter of the cylinder is set equal to the experimentallyobserved temperature.
4.3 Results from the present method
Again, due to the probe’s slenderness and relativelycompact size, quenching is modeled as a one-dimensionalaxisymmetric problem. Fig. 11 shows the estimated sur-face heat flux when b ¼ 1 and R ¼ 2 ðDt ¼ Ds ¼ 0:125sÞ:Also shown is the result from Burggraf’s analysis whereagain, Dt ¼ 0:125 s. It is seen from the figure that surfaceheat flux estimates from both methods are in excellentagreement.
Note that flux estimates become unbounded when nofuture temperatures ðR ¼ 0Þ are used (results not shown);
the results presented correspond to the least stable solu-tion obtained. It is also observed that stable solutionsnearly identical to those given in Fig. 11 are obtainedwhen b ¼ 2 and b ¼ 5; with R ¼ 1 (results not shown).Due to the highly transient nature of surface heat transfer,use of more than one future temperature for b > 1 isfound to produce solutions which lag somewhat behindthe actual flux. Thus, a certain amount of trial and errormay be required when determining R; particularly instrongly time-dependent problems.
The oscillations produced by the present method mayin part reflect amplification of small amplitude, highfrequency noise components in the measured tempera-ture signal (note, these are not resolved in Fig. 12). Asillustrated for example by Kurpisz and Nowak [4],estimated time rates of change of the surface flux vectorqnþ1 are subject to large amplitude variations due to timedifferentiation of the low amplitude, high frequencyrandom component in the measured signal. An addi-tional factor likely underlying the oscillatory flux esti-mates is associated with the fact that the computationaltime step, Dt; equals the experimental sample interval,Ds: As indicated by the results from the first test caseabove, Dt should be chosen larger than Ds:
Interestingly, the oscillating flux does not affect theaccuracy of the estimated temperature at the center ofthe probe. As shown in Fig. 12, the estimated tempera-ture history tracks the experimental history throughout.Due to the fact that both Ds and Dt are much shorterthan the thermal diffusion time scale, high frequencycomponents in both the actual and estimated surfaceheat flux are smeared by diffusion. This results insmooth experimental and predicted temperature varia-tions at the center (at least to the resolution of the plot).Comparing the temperature history obtained by the
0 10 20 30 40 50 60-1.0E+06
-8.0E+05
-6.0E+05
-4.0E+05
-2.0E+05
0.0E+00
q (W
/m.°C
)
Time (s)
Present method
Burggraf 's method
Fig. 11 Predicted surface heat flux as a function of time. For thepresent method, b ¼ 1, and R ¼ 2; for Burggraf’s method,Dt ¼ 0:125
0 10 20 30 40 50 60
200
300
400
500
600
700
800
Tem
pera
ture
(°C
)
Time (s)
Present method
Experiment
Fig. 12 Calculated center temperature using two future temperatures.b ¼ 1
126

present approach with that predicted via the non-stabilized method in [12], it is found that in the presentcase the maximum relative error between predicted andexperimental temperatures is approximately 0:4%;roughly an order of magnitude smaller than the 3 to 5%maximum error observed in [12].
Heat transfer coefficients associated with the fluxestimates in Fig. 11 are shown in Fig. 13 ðb ¼ 1; R ¼ 2Þ.Here,
hnþ1 ¼ qnþ1
h1 � hnþ1=2N
; ð26Þ
where nþ 1 again denotes the time index,
hnþ1=2N ¼ hn
N þ hnþ1N
2; ð27Þ
and hN is the surface temperature. Also shown is asolution reported by Bodin et al. [18] who used a finitedifference-based inverse method and an essentiallyidentical experimental set-up. It is clear that solutionsobtained by the present method are qualitatively andquantitatively consistent with those obtained by Bodin etal. [18]. Considering first the qualitative featuresexhibited in Fig. 13, the cylinder is initially enveloped in avapor blanket over 850oCJhJ560oC, with correspond-ing heat transfer coefficients remaining relatively small.The blanket then collapses, giving way to heterogeneoussurface boiling and a rapid increase in surface heattransfer (beginning at h � 560oC). Gradual suppressionof two-phase heat transfer, reflected in the subsequentdecay in h , occurs over 450oCJhJ350oC. Finally,natural convection sets in over 350oCJhJ180oC. Notethat a similar interpretation holds for the estimated fluxhistory in Fig. 11.
Quantitatively, a comparison of our results withBodin’s [18] shows that estimated h magnitudes duringeach stage of the quenching process are essentiallyequal. Moreover, maximum h values are also nearlyequal. Although it appears that a significant offset ex-ists between both estimates during the vapor collapsephase ð560 Co JT J350 CoÞ; in reality, due to theviolence and brevity of this process (occurring in less 10seconds; see Fig. 11), it is likely that the offset merelyreflects random variations in the degree of liquid-solidcontact and nucleate boiling that occurs during col-lapse.
5 Summary and conclusions
A modified sequential function specification methodhas been developed for stabilizing solutions toparabolic inverse heat conduction problems. Themethod uses computational time steps that are largerthan the typically short experimental sample interval, aswell as future time steps that are equal to the sampleinterval. Beyond the advantages associated with Beck’stwo-step solution approach (detailed in Sect. 1), and incomparison to the standard function specificationmethod in which the various time steps are set equal,the modified technique appears to provide: (i) morerapid error suppression and less damping of early timeinverse estimates (under dynamic heat transfer condi-tions), (ii) improved stability and accuracy undercomparable levels of data truncation and thermalmeasurement error, and (iii) comparable performancein nonlinear problems.
Application of the inverse method to experimentalquenching of a cylindrical probe yields an estimatedflux history nearly identical to that obtained viaBurggraf’s method [17]. In addition, comparison withBodin’s [18] earlier finite difference-based inverseanalysis of a similar experiment shows that bothapproaches lead to qualitatively and quantita-tively similar time-varying heat transfer coefficientestimates.
The methods developed in this and an earlier study[12] provide a stable, non-iterative, FEM-based ap-proach for solving linear and nonlinear, multidimen-sional inverse heat conduction problems. These features,combined with explicit determination of the sensitivitymatrix, suggest that the technique may be useful inapplications requiring rapid inverse solutions, e.g.,thermally-based process control, and thermally-basedimaging (reconstruction) of sub-surface phase bound-aries [20]. In addition, the method may be adapted toinverse problems in other areas, such as inverse con-vection and inverse radiation. Ongoing work in ourgroup has also extended the method to the relativelydifficult two-dimensional problem of estimating time-and space-varying surface heat fluxes on two separateboundaries; the results of this work will soon be re-ported.
200 300 400 500 600 700 8000
500
1000
1500
2000
2500h(
W/m
2 .K
)
Temperature (∞C)
Present method
Bodin et al.
Fig. 13 Calculated heat transfer coefficients using two futuretemperatures. b ¼ 1
127

Finally, it is important to again note that the methodsdeveloped here and in [12], while emphasizing a finiteelement-based solution of the direct problem, can bereadily adapted to any other numerical scheme [1]. Asdescribed in the Introduction, Beck’s method [1] ofparabolizing the inverse heat conduction problem iscomprised of two essential elements: i) formulation ofthe standard form equation, relating the vector of un-known flux parameters to the instantaneous temperaturefield, and ii) derivation of the matrix normal equationgoverning the evolution of the unknown parametervector. The coefficient matrices arising in each of theseequations are determined by the numerical method usedto solve the direct problem.
Acknowledgments This research was supported by the NationalScience Foundation under Grant No. DMI-9820880.
References
1. Beck JV, Blakwell B, St Clair CR (1985) Inverse Heat Con-dution: Ill-Posed Problems. Wiley, New York
2. Ozisik MN, Orlande HRB (2000) Inverse Heat Transfer.Taylor-Francis, New York
3. Tikhonov AN, Arsenin VY (1977) Solution of Ill-Posed Prob-lems. V.H. Winston and Sons, Washington, DC
4. Kurpisz K, Nowak AJ (1995) Inverse Thermal Problems.Comput Mech Publications, Boston, MA
5. Hensel E (1991) Inverse Theory and Applications for Engineers.Prentice Hall, New Jersey
6 Murio DA (1993) The Mollification Method and the NumericalSolution of Ill-Posed Problems. Wiley, New York
7. Alifanov OM (1994) Inverse Heat Transfer Problems. Springer-Verlag, New York
8. Zabaras N, Woodbury K, Raynaud M (eds) (1993) Pro-ceedings of the Ist International Conference on InverseProblems in Engineering: Theory and Practice. ASME, NewYork
9. Delaunay D, Jarny Y, Woodbury K (eds) (1998) Proceedings ofthe 2nd International Conference on Inverse Problems inEngineering: Theory and Practice. ASME, New York
10. Woodbury KA (ed) (2000) Proceedings of the 3rd InternationalConference on Inverse Problems in Engineering: Theory andPractice. ASME, New York
11. Orlande HRB (ed) (2002) Proceedings of the 4th InternationalConference on Inverse Problems in Engineering: Theory andPractice. ASME, New York
12. Ling XW, Keanini RG, Cherukuri HP (2003) A non-iterativefinite element method for inverse heat conduction problems. IntJ Numer Methods in Eng. 56:1315–1334
13. Keanini RG (1998) Inverse estimation of surface heat flux dis-tributions during high speed rolling using remote thermalmeasurements. Int J Heat and Mass Trans 41:275–285
14. Beck JV (1970) Nonlinear estimation applied to nonlinear in-verse heat conduction problem. Int J Heat and Mass Trans13:703–716
15. Beck JV, Litkouhi B, St.Clair CR (1982) Efficient sequentialsolution of the nonlinear inverse heat conduction problem.Nume Heat Trans 5:275–286
16. Stolz G (1960) Numerical solutions to an inverse problem ofheat conduction for simple shapes. ASME J of Heat Trans82:20–26
17. Burgrraf OR (1964) An exact solution of the inverse problem inheat conduction theory and applications. ASME J of HeatTrans 86:373–382
18. Bodin J, Segerberg S (1992) Benchmark testing of computerprograms for determination of hardening performance. In:George E. Totten (ed) Quenching and Distortion Control.ASM Int
19. Quenchalyzer Manual (2000) Instruments & Technology, Inc20. Keanini RG (1997) Review: reconstruction and control of
phase boundaries during fusion welding. Trends in Heat andMass Trans 3:139–145
128







![A Rice Kinase-Protein Interaction Map1[W][OA] · A Rice Kinase-Protein Interaction Map1[W][OA] Xiaodong Ding, Todd Richter, Mei Chen, Hiroaki Fujii, Young Su Seo, Mingtang Xie, Xianwu](https://img.pdfslide.us/doc/110x75/5f38f48407b1ad242d44fd1e/a-rice-kinase-protein-interaction-map1woa-a-rice-kinase-protein-interaction.jpg)











![Distributed generator coordination for initialization and ...carmenere.ucsd.edu/cherukuri/2015_ChCo-tcns.pdf · cannot handle individual generator constraints. The work [12] deals](https://img.pdfslide.us/doc/110x75/5fd72d3b169b3c0f6d11ca9e/distributed-generator-coordination-for-initialization-and-cannot-handle-individual.jpg)


![“Maoists in India: Writings & Interviews”, by Azad [Cherukuri Rajkumar]](https://img.pdfslide.us/doc/110x75/557202604979599169a36746/maoists-in-india-writings-interviews-by-azad-cherukuri-rajkumar.jpg)