Embed Size (px)
Citation preview

Computer Networks 51 (2007) 2529–2553
www.elsevier.com/locate/comnet
Wireless sensor network localization techniques
Guoqiang Mao a,b,*, Barıs� Fidan b,c, Brian D.O. Anderson b,c
a School of Electrical and Information Engineering, The University of Sydney, Australiab National ICT Australia Ltd., Australia1
c Research School of Information Sciences and Engineering, The Australian National University, Australia
Received 27 June 2006; received in revised form 6 October 2006; accepted 15 November 2006Available online 3 January 2007
Responsible Editor: E. Ekici
Abstract
Wireless sensor network localization is an important area that attracted significant research interest. This interest isexpected to grow further with the proliferation of wireless sensor network applications. This paper provides an overviewof the measurement techniques in sensor network localization and the one-hop localization algorithms based on thesemeasurements. A detailed investigation on multi-hop connectivity-based and distance-based localization algorithms arepresented. A list of open research problems in the area of distance-based sensor network localization is provided withdiscussion on possible approaches to them.� 2006 Elsevier B.V. All rights reserved.
Keywords: Wireless sensor networks; Localization; AOA; RSS; TDOA
1. Introduction
Wireless sensor networks (WSNs) are a signifi-cant technology attracting considerable researchinterest. Recent advances in wireless communica-
1389-1286/$ - see front matter � 2006 Elsevier B.V. All rights reserved
doi:10.1016/j.comnet.2006.11.018
* Corresponding author. Address: School of Electrical andInformation Engineering, The University of Sydney, Australia.Tel.: +61 2 93512962; fax: +61 2 93513847.
E-mail address: [email protected] (G. Mao).1 National ICT Australia is funded by the Australian Govern-
ment’s Department of Communications, Information Technol-ogy and the Arts and the Australian Research Council throughthe Backing Australia’s Ability initiative and the ICT Centre ofExcellence Program.
tions and electronics have enabled the developmentof low-cost, low-power and multi-functional sensorsthat are small in size and communicate in short dis-tances. Cheap, smart sensors, networked throughwireless links and deployed in large numbers, pro-vide unprecedented opportunities for monitoringand controlling homes, cities, and the environment.In addition, networked sensors have a broad spec-trum of applications in the defence area, generatingnew capabilities for reconnaissance and surveillanceas well as other tactical applications [1].
Self-localization capability is a highly desirablecharacteristic of wireless sensor networks. In envi-ronmental monitoring applications such as bush firesurveillance, water quality monitoring and precisionagriculture, the measurement data are meaningless
.

2530 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
without knowing the location from where the dataare obtained. Moreover, location estimation mayenable a myriad of applications such as inven-tory management, intrusion detection, road trafficmonitoring, health monitoring, reconnaissance andsurveillance.
Sensor network localization algorithms estimatethe locations of sensors with initially unknown loca-tion information by using knowledge of the absolutepositions of a few sensors and inter-sensor measure-ments such as distance and bearing measurements.Sensors with known location information are calledanchors and their locations can be obtained by usinga global positioning system (GPS), or by installinganchors at points with known coordinates. In appli-cations requiring a global coordinate system, theseanchors will determine the location of the sensornetwork in the global coordinate system. In applica-tions where a local coordinate system suffices (e.g.,smart homes), these anchors define the local coordi-nate system to which all other sensors are referred.Because of constraints on the cost and size ofsensors, energy consumption, implementation envi-ronment (e.g., GPS is not accessible in someenvironments) and the deployment of sensors (e.g.,sensor nodes may be randomly scattered in theregion), most sensors do not know their locations.These sensors with unknown location informationare called non-anchor nodes and their coordinateswill be estimated by the sensor network localizationalgorithm.
In this paper, we provide an overview of tech-niques that can be used for WSN localization.Review of wireless network localization techniquescan be found in [2–4]. The focus of these referencesis on localization techniques in cellular network andwireless local area network (WLAN) environmentsand on the signal processing aspect of localizationtechniques. Sensor networks vary significantly fromtraditional cellular networks and WLAN, in thatsensor nodes are assumed to be small, inexpensive,cooperative and deployed in large quantity. Thesefeatures of sensor networks present unique chal-lenges and opportunities for WSN localization. Pat-wari et al. described some general signal processingtools that are useful in cooperative WSN localiza-tion algorithms [5] with a focus on computing theCramer–Rao bounds for localization using a varietyof different types of measurements [5]. Our review incontrast focuses on the measurement techniquesand localization algorithms in WSNs. While manytechniques covered in this paper can be applied in
both 2-dimension (R2) and 3-dimension (R3), wechoose to focus on 2D localization problems forease of explanation.
The rest of the paper is organized as follows. InSection 2, measurement techniques in WSN locali-zation are discussed; these include angle-of-arrival(AOA) measurements, distance related measure-ments and RSS profiling techniques. Distancerelated measurements are further classified intoone-way propagation time and roundtrip propaga-tion time measurements, the lighthouse approachto distance measurements, received signal strength(RSS)-based distance measurements and time-differ-ence-of-arrival (TDOA) measurements. In Section3, one-hop localization techniques based on thesemeasurements are discussed. Section 4 discussesnonline-of-sight error mitigation techniques inWSN localization. Sections 5 and 6 focus onmulti-hop localization techniques, in particular con-nectivity-based and distance-based multi-hop local-ization techniques. Section 7 discusses open researchproblems in distance-based localization. Finally asummary is provided in Section 8.
2. Measurement techniques
Measurement techniques in WSN localizationcan be broadly classified into three categories:AOA measurements, distance related measurementsand RSS profiling techniques.
2.1. Angle-of-arrival measurements
The angle-of-arrival measurement techniques canbe further divided into two subclasses: those makinguse of the receiver antenna’s amplitude responseand those making use of the receiver antenna’sphase response.
Beamforming is the name given to the use ofanisotropy in the reception pattern of an antenna,and it is the basis of one category of AOA measure-ment techniques. The measurement unit can be ofsmall size in comparison with the wavelength ofthe signals. The beam pattern of a typical aniso-tropic antenna is shown in Fig. 1. One can imaginethat the beam of the receiver antenna is rotated elec-tronically or mechanically, and the direction corre-sponding to the maximum signal strength is takenas the direction of the transmitter. Relevant param-eters are the sensitivity of the receiver and the beamwidth. A technical problem to be faced and over-come arises when the transmitted signal has a vary-

Fig. 1. An illustration of the horizontal antenna pattern of atypical anisotropic antenna.
Fig. 2. An antenna array with N antenna elements.
G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2531
ing signal strength. The receiver cannot differentiatethe signal strength variation due to the varyingamplitude of the transmitted signal and the signalstrength variation caused by the anisotropy in thereception pattern. One approach to dealing withthe problem is to use a second non-rotating andomnidirectional antenna at the receiver. By normal-izing the signal strength received by the rotatinganisotropic antenna with respect to the signalstrength received by the non-rotating omnidirec-tional antenna, the impact of varying signal strengthcan be largely removed.
Another widely used approach [6] to cope withthe varying signal strength problem is to use a min-imum of two (but typically at least four) stationaryantennas with known, anisotropic antenna patterns.Overlapping of these patterns and comparing thesignal strength received from each antenna at thesame time yields the transmitter direction, evenwhen the signal strength changes. Coarse tuning isperformed by measuring which antenna has thestrongest signal, and it is followed by fine tuningwhich compares amplitude responses. Because smallerrors in measuring the received power can lead to alarge AOA measurement error, a typical measure-ment accuracy for four antennas is 10–15�. Withsix antennas, this can be improved to about 5�,and 2� with eight antennas [6].
The second category of measurement techniques,known as phase interferometry [7], derives the AOAmeasurements from the measurements of the phasedifferences in the arrival of a wave front. It typicallyrequires a large receiver antenna (relative to thewavelength of the transmitter signal) or an antennaarray. Fig. 2 shows an antenna array of N antennaelements. The adjacent antenna elements are sepa-rated by a uniform distance d. The distance between
a transmitter far away from the antenna array andthe ith antenna element can be approximated by
Ri � R0 � id cos h; ð1Þ
where R0 is the distance between the transmitter andthe 0th antenna element and h is the bearing of thetransmitter with respect to the antenna array. Thetransmitter signals received by adjacent antenna ele-ments have a phase difference of 2p d cos h
k , which al-lows us to obtain the bearing of the transmitterfrom the measurement of the phase difference. Thisapproach works quite well for high SNR but mayfail in the presence of strong co-channel interferenceand/or multipath signals [7].
The accuracy of AOA measurements is limited bythe directivity of the antenna, by shadowing and bymultipath reflections. How to obtain accurate AOAmeasurements in the presence of multipath andshadowing errors has been a subject of intensiveresearch. AOA measurements rely on a direct line-of-sight (LOS) path from the transmitter to the recei-ver. However a multipath component may appear asa signal arriving from an entirely different directionand can lead to very large errors in AOA measure-ments. Multipath problems in AOA measurementscan be addressed by using the maximum likelihood(ML) algorithms [7]. Different ML algorithms havebeen proposed in the literature which make differentassumptions about the statistical characteristics ofthe incident signals [8–10]. They can be classified intodeterministic and stochastic ML methods. TypicallyML methods will estimate the AOA of each separatepath in a multipath environment. The implementa-tion of these methods is computationally intensiveand requires complex multidimensional search. Thedimensionality of the search is equal to the totalnumber of paths taken by all the received signals[7]. The problem is further complicated by the fact

2532 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
that the total number of paths is not known a priori
and must be estimated. Different from the earlierML methods, which assume the incoming signal isan unknown stochastic process, another class ofML methods [11–13] assume that the structure ofthe signal waveform is known to the receiver. Thisassumption is possible in some digital communica-tion systems because the modulation format isknown to the receiver and many systems areequipped with a known training sequence in the pre-amble. This extra information is exploited toimprove the accuracy of AOA measurements or sim-plify computation.
Yet another class of AOA measurement methodsis based on so-called subspace-based algorithms[14–17]. The most well known methods in this cate-gory are MUSIC (multiple signal classification) [14]and ESPRIT (estimation of signal parameters byrotational invariance techniques) [15,16]. Theseeigenanalysis based direction finding algorithms uti-lize a vector space formulation, which takes advan-tage of the underlying parametric data model for thesensor array problem. They require a multi-arrayantenna in order to form a correlation matrix usingsignals received by the array. The measured signalvectors received at the M array elements is visual-ized as a vector in M dimensional space. Utilizingan eigen-decomposition of the correlation matrix,the vector space is separated into signal and noisesubspaces. Then the MUSIC algorithm searchesfor nulls in the magnitude squared of the projectionof the direction vector onto the noise subspace. Thenulls are a function of angle-of-arrival, from whichangle-of-arrival can be estimated. For linear arrays,Root-MUSIC [18], a polynomial rooting version ofMUSIC, improves the resolution capabilities ofMUSIC. A weighted norm version of MUSIC,WMUSIC [19], also gives an extension in the resolu-tion capabilities compared to the original MUSIC.ESPRIT [15,16] is based on the estimation of signalparameters via rotational invariance techniques. Ituses two displaced subarrays of matched sensordoublets to exploit an underlying rotational invari-ance among signal subspaces for such an array. Acomprehensive experimental evaluation of MUSIC,Root-MUSIC, WMUSIC, Min-Norm [20] andESPRIT algorithms can be found in [21]. A verylarge number of AOA measurement techniqueshave been developed which are based on MUSICand ESPRIT, to cite but two, see e.g. [17,22]. Dueto space limitations, we do not provide an exhaus-tive list of them in this paper. Readers may refer
to [23] for a detailed technical discussion on AOAmeasurement techniques.
2.2. Distance related measurements
Distance related measurements include propaga-tion time based measurements, i.e., one-way propa-gation time measurements, roundtrip propagationtime measurements and time-difference-of-arrival(TDOA) measurements, and RSS measurements.Another interesting technique measuring distance,which does not fall into the above categories, isthe lighthouse approach shown in [24]. In thefollowing paragraphs we provide further details ofthese techniques.
2.2.1. One-way propagation time and roundtrip
propagation time measurements
One-way propagation time and roundtrip propa-gation time measurements are also generally knownas time-of-arrival measurements. Distances betweenneighboring sensors can be estimated from thesepropagation time measurements.
One-way propagation time measurements mea-sure the difference between the sending time of a sig-nal at the transmitter and the receiving time of thesignal at the receiver. It requires the local time atthe transmitter and the local time at the receiver tobe accurately synchronized. This requirement mayadd to the cost of sensors by demanding a highlyaccurate clock and/or increase the complexity ofthe sensor network by demanding a sophisticatedsynchronization mechanism. This disadvantagemakes one-way propagation time measurements aless attractive option than measuring roundtrip timein WSNs. Roundtrip propagation time measure-ments measure the difference between the time whena signal is sent by a sensor and the time when thesignal returned by a second sensor is received atthe original sensor. Since the same clock is used tocompute the roundtrip propagation time, there isno synchronization problem. The major error sourcein roundtrip propagation time measurements is thedelay required for handling the signal in the secondsensor. This internal delay is either known via a pri-
ori calibration, or measured and sent to the first sen-sor to be subtracted. A detailed discussion oncircuitry design for roundtrip propagation time mea-surements can be found in [25].
Time delay measurement is a relatively maturefield. The most widely used method for obtainingtime delay measurement is the generalized cross-cor-

Fig. 3. An illustration of the lighthouse approach for distancemeasurement.
G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2533
relation method [26,27]. A detailed discussion on thecross-correlation method is given in Section 2.2.3.
Based on the observation that the speed of soundin the air is much smaller than the speed of light(RF) in the air, Priyantha et al. developed a tech-nique to measure the one-way propagation time[28], which solved the synchronization problem. Ituses a combination of RF and ultrasound hardware.On each transmission, a transmitter sends an RFsignal and an ultrasonic pulse at the same time.The RF signal will arrive at the receiver earlier thanthe ultrasonic pulse. When the receiver receives theRF signal, it turns on its ultrasonic receiver and lis-tens for the ultrasonic pulse. The time differencebetween the receipt of the RF signal and the receiptof the ultrasonic signal is used as an estimate of theone-way acoustic propagation time. Their methodgave fairly accurate distance estimate at the costof additional hardware and complexity of the sys-tem because ultrasonic reception suffers from severemultipath effects caused by reflections from wallsand other objects.
A recent trend in propagation time measurementsis the use of ultra wide band (UWB) signals for accu-rate distance estimation [29,30]. A UWB signal is asignal whose bandwidth to center frequency ratiois larger than 0.2 or a signal with a total bandwidthof more than 500 MHz. UWB can achieve higheraccuracy because its bandwidth is very large andtherefore its pulse has a very short duration. Thisfeature makes fine time resolution of UWB signalsand easy separation of multipath signals possible.
2.2.2. Lighthouse approach to distance measurementsAnother interesting approach to distance mea-
surements is the lighthouse approach [24] whichderives the distance between an optical receiverand a transmitter of a parallel rotating optical beamby measuring the time duration that the receiverdwells in the beam. Fig. 3 illustrates the principleof the lighthouse approach. A transmitter locatedat the origin is equipped with a parallel opticalbeam, i.e., an optical beam whose beam width b isconstant with respect to the distance from the rota-tional axis of the beam. The optical beam rotates atan unknown angular velocity x around the Z axis.An optical receiver in the XY plane and at a dis-tance d1 from the Z axis detects the beam for a timeduration t1. From Fig. 3, it can be shown that
d1 �b
2 sinða1=2Þ ¼b
2 sinðxt1=2Þ : ð2Þ
The unknown angular velocity x can be derivedfrom the difference between the time instant whenthe optical receiver first detects the beam and thetime instant when the optical receiver detects thebeam for the second time. Therefore the distanced1 can be derived from the time duration t1 thatthe optical receiver dwells in the beam.
The lighthouse approach measures the distancebetween an optical receiver and the rotational axisof the optical beam generated by the transmitter.A major advantage of the lighthouse approach isthe optical receiver can be of a very small size, thusmaking the idea of ‘‘smart dust’’ possible [24]. How-ever the transmitter may be large. The approachalso requires a direct line-of-sight between theoptical receiver and the transmitter.
2.2.3. Time-difference-of-arrival measurements
There is a category of localization algorithmsutilizing TDOA measurements of the transmitter’ssignal at a number of receivers with known location

2534 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
information to estimate the location of the transmit-ter. Fig. 4 shows a TDOA localization scenario witha group of four receivers at locations r1, r2, r3, r4 anda transmitter at rt. The TDOA between a pair ofreceivers i and j is given by
Dtij , ti � tj ¼1
cðkri � rtk � krj � rtkÞ; i 6¼ j; ð3Þ
where ti and tj are the time when a signal is receivedat receivers i and j, respectively, c is the propagationspeed of the signal, and kÆk denotes the Euclideannorm.
Measuring the TDOA of a signal at two receiversat separate locations is a relatively mature field [31].The most widely used method is the generalizedcross-correlation method, where the cross-correla-tion function between two signals si and sj receivedat receivers i and j is given by integrating the lagproduct of two received signals for a sufficientlylong time period T,
qi;jðsÞ ¼1
T
Z T
0
siðtÞsjðt � sÞdt: ð4Þ
The cross-correlation function can also be obtainedfrom an inverse Fourier transform of the estimatedfrequency domain cross-spectral density function.Frequency domain processing is often preferred be-cause the signals can be filtered prior to computationof the cross-correlation function. The cross-correla-tion approach requires very accurate synchroniza-tion among receivers but does not impose anyrequirement on the signal transmitted by the trans-mitter. The accuracy and temporal resolution capa-bilities of TDOA measurements will improve whenthe separation between receivers increases because
Fig. 4. Localization using time-difference-of-arrival measure-ments.
this increases differences between time-of-arrival.Closely spaced multiple receivers may give rise tomultiple received signals that cannot be separated.For example, TDOA of multiple signals that arenot separated by more than the width of theircross-correlation peaks (whose location on thetime-delay axis corresponds to TDOA) usually can-not be resolved by conventional TDOA measure-ment techniques [32]. Yet another factor affectingthe accuracy of TDOA measurement is multipath.Overlapping cross-correlation peaks due to multi-path often cannot be resolved. Even if distinct peakscan be resolved, a method must be designed forselecting the correct peak value, such as choosingthe largest or the first peak [7].
It is worth noting that Gardner and Chen pro-posed an approach in [32,33], which exploits thecyclostationarity property of a certain signal toobtain substantial tolerance to noise and interfer-ence. The cyclostationarity property is a directresult of the underlying periodicities in the signaldue to periodic sampling, scanning, modulating,multiplexing, and coding operations employed inthe transmitter. Both the frequency-shifted andtime-shifted cross-correlations are utilized to exploitthe unique cyclostationarity property of the signal.Their method requires the signal of interest to havea known analog frequency or digital keying ratethat is distinct from that of the interfering signal.
2.2.4. Distance estimation via received signal strength
measurements
Another category of distance related measure-ment techniques estimates the distances betweenneighboring sensors from the received signalstrength measurements [34–38]. These techniquesare based on a standard feature found in most wire-less devices, a received signal strength indicator(RSSI). They are attractive because they requireno additional hardware, and are unlikely to signifi-cantly impact local power consumption, sensor sizeand thus cost.
In free space, other things being equal the RSSvaries as the inverse square of the distance d
between the transmitter and the receiver. Let usdenote this received power by Pr(d). The receivedpower Pr(d) is related to the distance d throughthe Friis equation [39]
P rðdÞ ¼P tGtGrk
2
ð4pÞ2d2; ð5Þ

G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2535
where Pt is the transmitted power, Gt is the trans-mitter antenna gain, Gr is the receiver antenna gainand k is the wavelength of the transmitter signal inmeters.
The free-space model however is an over-ideali-zation, and the propagation of a signal is affectedby reflection, diffraction and scattering. Of course,these effects are environment (indoors, outdoors,rain, buildings, etc.) dependent. However, it isaccepted on the basis of empirical evidence that itis reasonable to model the RSS Pr(d) at any valueof d at a particular location as a random and log-normally distributed random variable with a dis-tance-dependent mean value [40,41]. That is,
P rðdÞ ½dB m� ¼ P 0ðd0Þ ½dB m� � 10nplog10
dd0
� �þX r;
ð6Þ
where P0(d0) [dB m] is a known reference power va-lue in dB milliwatts at a reference distance d0 fromthe transmitter, np is the path loss exponent thatmeasures the rate at which the RSS decreases withdistance and the value of np depends on the specificpropagation environment, Xr is a zero mean Gauss-ian distributed random variable with standard devi-ation r and it accounts for the random effect ofshadowing [39]. In this paper, we use the notation[dBm] to denote that power is in dB milliwatts units.Otherwise, it is in milliwatts.
It is trivial to conclude from Eq. (6) that, giventhe RSS measurement, Pij, between a transmitter i
and a receiver j, a maximum likelihood estimate ofthe distance, dij, between the transmitter and thereceiver is
d ij ¼ d0
P ij
P 0ðd0Þ
� ��1=np
: ð7Þ
Note that Pij and P0(d0) in Eq. (7) are measured inmilliwatts instead of dB milliwatts. Using Eqs. (6)and (7), the estimated distance d ij can be relatedto the true distance
d ij ¼ dij10� Xr
10np ¼ dij10� lnð10ÞXr
10np lnð10Þ ¼ dije�Xr
gnp ; ð8Þ
where g ¼ 10lnð10Þ. The expected value of d ij is
E dij
� �¼ 1ffiffiffiffiffiffi
2pp
r
Z 1
�1dije
�Xrgnp e�
Xr2r2 dX r ¼ dije
r2
2g2n2p : ð9Þ
Thus the maximum likelihood estimate in Eq. (7) isa biased estimate of the true distance and an unbi-ased estimate is given by
d ij ¼ d0
P ij
P 0ðd0Þ
� ��1=np
e� r2
2g2n2p : ð10Þ
2.3. RSS profiling measurements
Yet another category of localization techniques,i.e., the RSS profiling-based localization techniques[42–46], work by constructing a form of map of thesignal strength behavior in the coverage area. Themap is obtained either offline by a priori measure-ments or online using sniffing devices [44] deployedat known locations. They have been mainly used forlocation estimation in WLANs, but they wouldappear to be attractive also for wireless sensornetworks.
In this technique, in addition to there beinganchor nodes (e.g., access points in WLANs) andnon-anchor nodes, a large number of sample points(e.g., sniffing devices) are distributed throughout thecoverage area of the sensor network. At each samplepoint, a vector of signal strengths is obtained, withthe jth entry corresponding to the jth anchor’s trans-mitted signal. Of course, many entries of the signalstrength vector may be zero or very small, corre-sponding to anchor nodes at larger distances (rela-tive to the transmission range or sensing radius)from the sample point. The collection of all thesevectors provides (by extrapolation in the vicinityof the sample points) a map of the whole region.The collection constitutes the RSS model, and it isunique with respect to the anchor locations andthe environment. The model is stored in a centrallocation. By referring to the RSS model, a non-anchor node can estimate its location using theRSS measurements from anchors.
In summary, a number of measurement tech-niques are available for WSN localization. Whichmeasurement technique to use for location estima-tion will depend on the specific application. Typi-cally, localization algorithms based on AOA andpropagation time measurements are able to achievebetter accuracy than localization algorithms basedon RSS measurements. However, that accuracy isachieved at the expense of higher equipment cost.Patwati et al. gave the Cramer–Rao lower boundsfor location estimation using TOA, RSS and AOAmeasurements respectively in [5]. However theCramer–Rao lower bound may be too optimisticwhen the measurement error deviates from Gauss-ian. Moreover the Cramer–Rao bound assumesthe underlying estimator is an unbiased estimator.

2536 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
This assumption may not be satisfied by many local-ization techniques.
3. One-hop localization techniques
In this section, we discuss the principles of one-hop localization techniques in which the non-anchor node to be localized is the one-hop neighborof a sufficient number of anchors.
3.1. AOA based one-hop localization techniques
In the absence of noise and interference, bearinglines from two or more receivers will intersect todetermine a unique location, i.e., the location esti-mate of the transmitter. In the presence of noise,more than two bearing lines will not intersect at asingle point and statistical algorithms, sometimescalled triangulation or fixing methods, are requiredin order to obtain the location estimate of the trans-mitter [47,48]. This is shown in Fig. 5.
Location estimation using bearing measurementsis a well researched problem [47–52]. The pioneeringwork in the area is that of Stanfield [49]. Hisapproach has been further generalized in [50,52]and has been implemented in many practical sys-tems. Another well-known approach is the maxi-mum likelihood estimator [47,51].
The 2D localization problem using bearing mea-surements can be formulated as follows. Letxt = [xt,yt]
T be the true coordinate vector of thetransmitter to be estimated from bearing measure-ments b = [b1, . . . ,bN]T, where N is the total numberof receivers. Let xi = [xi,yi]
T be the known locationof the receiver associated with the ith bearing mea-
Fig. 5. In the presence of noise, bearing lines from three receiverswill not interact at the same point.
surement. Denote by h(x) = [h1(x), . . . ,hN(x)]T thebearings of a transmitter located at x = [x,y]T atthe receiver locations, where hi(x), 1 6 i 6 N isrelated to x by
tan hiðxÞ ¼y � yi
x� xi: ð11Þ
The measured bearings of the transmitter consist ofthe true bearings corrupted by additive noisese = [e1, . . . , eN]T, which are assumed to be zero-meanGaussian noises with N · N covariance matricesS ¼ diagfr2
1; . . . ; r2Ng, i.e.,
b ¼ hðxtÞ þ e: ð12Þ
When the receivers are identical and much closer toeach other than to the transmitter, the variances ofbearing measurement errors are equal, i.e.,r2
1 ¼ � � � r2N ¼ r2. The ML estimator of the transmit-
ter location xt is given by
xt ¼ arg min1
2½hðxtÞ � b�TS�1½hðxtÞ � b� ð13Þ
¼ arg min1
2
XN
i¼1
ðhiðxtÞ � biÞ2
r2i
: ð14Þ
The nonlinear minimization problem in Eq. (13) canbe solved by a Newton–Gauss iteration [47,48]
xt;kþ1¼ xt;kþðhxðxt;kÞTS�1hxðxt;kÞÞ�1hxðxt;kÞTS�1½b�hxðxt;kÞ�;ð15Þ
where hxðxt;kÞ denotes the partial derivative of hwith respect to x evaluated at xt;k. The use ofEq. (15) requires an initial estimate close enoughto the true minimum of the cost function. Such aninitial estimate may be obtained from prior infor-mation, or using a suboptimal procedure [48].
The Stanfield approach assumes that the mea-surement error is small enough such that ei � sin ei,1 6 i 6 N. In that case, the cost function in Eq.(14) becomes
1
2
XN
i¼1
sin2ðhiðxtÞ � biÞr2
i: ð16Þ
Using the relation
sinðhiðxtÞ � biÞ ¼ sin hiðxtÞ cos bi � cos hiðxtÞ sin bi
¼ ðyt � yiÞ cos bi � ðxt � xiÞ sin bi
ri;
where ri ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðxt � xiÞ2 þ ðyt � yiÞ
2q
, Eq. (16) becomes

Fig. 6. Intersecting hyperbolas from three receivers.
G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2537
1
2
XN
i¼1
½ðyt � yiÞ cos bi � ðxt � xiÞ sin bi�2
r2i r2
i
¼ 1
2ðAxt � bÞTR�1S�1ðAxt � bÞ; ð17Þ
where
A ¼
sin b1 � cos b1
..
. ...
sin bN � cos bN
2664
3775; ð18Þ
b ¼
x1 sin b1 � y1 cos b1
..
.
xN sin b1 � y1 cos bN
26664
37775; ð19Þ
R ¼ diagfr21; . . . ; r2
Ng: ð20Þ
Stanfield implicitly assumes that even though R isnot perfectly known, a rough estimate of R can beobtained. Since the cost function weakly dependson R, the fact that the estimate is rough will not sig-nificantly affect the solution. Under these assump-tions, the minimization of Eq. (17) with respect toxt is a well known problem and the solution is givenby
xt ¼ ðATR�1S�1AÞ�1ATR�1S�1b: ð21Þ
Note that the closed form solution in the Stan-field approach depends on two assumptions: first,the measurement error is small such that ei � sin ei,1 6 i 6 N; second, R is known. One may chose toaccept the first assumption but reject the secondassumption. In that case an iterative procedurecan be used to obtain the solution to the minimiza-tion problem, which has no advantage over the MLtechnique [48].
Analytical expressions for the bias and thecovariance matrix of the estimation errors associ-ated with the ML approach and with the Stanfieldapproach were given in [48]. It was shown that theStanfield approach provides biased estimates evenfor a large number of bearing measurements andthe ML approach is asymptotically unbiased at alarge number of measurements. However the RMS(root mean square) error of Stanfield approach isnot necessarily larger than that of the MLapproach. A quite different approach is referred toat the end of Section 3.3, using a very recently intro-duced method of exploiting the over-determinednature of the noiseless problem.
3.2. TDOA-based one-hop localization techniques
Given the TDOA measurement Dtij and the coor-dinates of receivers i and j, Eq. (3) defines onebranch of a hyperbola whose foci are at the loca-tions of receivers i and j and on which the transmit-ter rt must lie. In R2, measurements from aminimum of three receivers are required to uniquelydetermine the location of the transmitter. This isillustrated in Fig. 6.
In a system of N receivers, there are N � 1 line-arly independent TDOA equations, which can bewritten compactly as
kr1 � rtk � krN � rtk � cDt1N
..
.
krN�1 � rtk � krN � rtk � cDtN�1;N
2664
3775 ¼ 0: ð22Þ
In practice, Dtij is not available; instead we have thenoisy TDOA measurement D~tij given by
D~tij ¼ Dtij þ nij; ð23Þ
where nij denotes an additive noise, which is usuallyassumed to be an independent zero-mean Gaussiandistributed random variable. Eq. (22) is a nonlinearequation that is difficult to solve, especially whenthe receivers are arranged in an arbitrary fashion.Moreover, in the presence of noise, Eq. (22) maynot have a solution.
A noisy version of Eq. (22) can be written as
D~t1N
..
.
D~tN�1N
2664
3775 ¼
kr1�rtk�krN�rtkc
..
.
krN�1�rtk�krN�rtkc
2664
3775þ
e1N
..
.
eN�1N
2664
3775: ð24Þ

2538 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
Denote by D~t the TDOA measurement vector½D~t1N ; . . . ;D~tN�1N �T. Denote by f(rt) the vector½1cðkr1� rtk�krN � rtkÞ; . . . ;1cðkrN�1� rtk�krN � rtkÞ�Tand denote by S the covariance matrix of theTDOA measurement errors. The ML estimatorminimizes the following quadratic function:
QðrtÞ ¼ D~t� fðrtÞ� �T
S�1 D~t � fðrtÞ� �
; ð25Þ
in which f(rt) is a nonlinear vector function. In orderto obtain a reasonably simple estimator, f(rt) can belinearized using Taylor series around a referencepoint r0
fðrtÞ � fðr0Þ þ frðr0Þðrt � r0Þ; ð26Þ
where fr(r0) is a (N � 1) · 2 (in R2) matrix of partialderivative of f with respect to r evaluated at r0. Arecursive solution to the ML estimator can thenbe obtained [47]
rt;kþ1¼ rt;kþ frðrt;kÞTS�1frðrt;kÞ� ��1
frðrt;kÞTS�1 D~t� fðrt;kÞ� �
:
ð27Þ
This method relies on a good initial guess of thetransmitter location. Moreover, in some situationsthis method can result in significant location estima-tion errors due to geometric dilution of precision(GDOP) effects. GDOP describes a situation inwhich a relatively small ranging error can result ina large location estimation error because the trans-mitter is located on a portion of the hyperbola faraway from both receivers [7,53]. Fang [54] gave anexact solution to the hyperbolic equations inEq. (22) when the number of TDOA measurementsare equal to the number of unknown transmittercoordinates. However his solution cannot makeuse of extra measurements. Other techniques thatcan deal with the more general situation with extrameasurements include the spherical interpolationmethod [55], which is derived from least-squares‘‘equation-error’’ minimization, and the divide andconquer method [56]. The divide and conquerestimate is formed by combining the maximum like-lihood estimates using possibly overlapping subsec-tions of the measurement data vector. The divideand conquer method can achieve the optimum per-formance but it requires that the Fisher informationmatrix is sufficiently large. Chan and Ho [57] devel-oped a closed form solution valid for an arbitrarynumber of TDOA measurements and arbitrarilydistributed transmitters. The solution is an approx-imation of the maximum likelihood estimator whenthe TDOA measurement errors are small. Chan’s
method performs significantly better than the spher-ical interpolation method and is more robustagainst noise than the divide and conquer method.The computational complexity of Chan’s methodis comparable to the spherical interpolation methodbut substantially less than the Taylor-series method[47]. Recently, Dogancay and Drake developed aclosed form solution for localization of distanttransmitters based on triangulation of hyperbolicasymptotes [58,59]. The hyperbolic curves areapproximated by linear asymptotes. The solutionexhibits some performance degradation with respectto the maximum likelihood estimator at low noiselevels but outperforms the maximum likelihood esti-mator at medium to high noise levels.
3.3. Distance-based one-hop localization techniques
The most well-known distance-based localizationtechnique is based on use of GPS. The GPS spacesegment consists of 24 satellites in the medium earthorbit at a nominal altitude of 20,200 km with anorbital inclination of 55�. Each satellite carriesseveral high accuracy atomic clocks and radiates asequence of bits that starts at a precisely knowntime. The location of a GPS satellite at any particu-lar time instant is known. A GPS receiver located onthe earth derives its distance to a GPS satellite fromthe difference of the time a GPS signal is received atthe receiver and the time the GPS signal is radiatedby the GPS satellite. Ideally, distance measurementsto three GPS satellites allow the GPS receiver touniquely determine its position. In reality, four sat-ellites, rather than three, are required because ofsynchronization error in the receiver’s clock. Thefourth distance measurement provides informationfrom which the synchronization error of the receivercan be corrected and the receiver’s clock can be syn-chronized to an accuracy better than 100 ns.
Generally in a WSN, for a non-anchor node atunknown location xt with noise-contaminated dis-tance measurements ~d1; . . . ; ~dN to N anchors atknown locations x1, . . . ,xN, the location estimationproblem can be formulated using a maximum likeli-hood approach as
xt ¼ arg min½dðxtÞ � ~d�TS�1½dðxtÞ � ~d�; ð28Þ
where ~d is a N · 1 distance measurement vector,dðxtÞ is also a N · 1 vector ½kxt�x1k; . . . ;kxt�xNk�and S is the covariance matrix of the distance mea-surement errors. This minimization problem can be

G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2539
solved using a similar procedure described in Sec-tion 3.1 and Section 3.2.
An interesting development in the area is the useof the Cayley–Menger determinant [60,61] to reducethe impact of distance measurement errors on thelocation estimate [62,63]. To illustrate the concept,consider a non-anchor node xt having distance mea-surements to three anchors x1, x2, x3 in R2, which isshown in Fig. 7.
The Cayley–Menger determinant of this quadri-lateral is given by
Dðx1; x2; x3; xtÞ ¼
0 d212 d2
13 d2t1 1
d212 0 d2
23 d2t2 1
d213 d2
23 0 d2t3 1
d2t1 d2
t2 d2t3 0 1
1 1 1 1 0
: ð29Þ
A classical result on the Cayley–Menger determi-nant is given by the following theorem:
Theorem 1 (Theorem 112.1 in [61]). Consider an n-
tuple of points x1, . . . ,xn in m-dimensional space with
n P m + 1. The rank of the Cayley–Menger matrix
M(x1, . . . ,xn) (defined analogously to the right side of
Eq. (29) but without the determinant operation) is at
most m + 1.
According to the above theorem, in R2,
Dðx1; x2; x3; xtÞ ¼ 0: ð30ÞNote that the distances between anchors d12, d13 andd23 can be inferred from known anchor positions.The true distances between the non-anchor nodeand the anchors are related to the measured dis-tances by
~dti ¼ dti þ ei; 1 6 i 6 3: ð31ÞPutting Eq. (31) into Eq. (30), it can be shown that[62]
Fig. 7. A fully connected planar quadrilateral in sensor networks.
eTAeþ eTbþ c ¼ 0; ð32Þwhere e = [e1, e2, e3]T, the matrix A, vectors b and c
can be expressed in the form of known inter-anchordistances d12, d13, d23 and measured distances~dt1; ~dt2; ~dt3. Eq. (32) forms an additional equalityconstraint on the non-anchor node position. For anon-anchor node forming m quadrilaterals withneighboring anchors, there are m independent equa-tions like Eq. (32). These equality constraints can becombined with Eq. (28) using Lagrange multipliers[62]. Numerical methods, such as the gradient des-cent algorithm, can be exploited to search for thesolution, which gives a location estimate superiorto that obtained using Eq. (28) only.
The essence of using the Cayley–Menger determi-nant to reduce the impact of distance measurementerrors is: the six edges of a planar quadrilateral arenot independent, instead they must satisfy theequality constraint in Eq. (30). This equalityconstraint can be exploited to reduce the impactof distance measurement errors. This idea may alsoextend to TDOA and AOA [64] based localization.
3.4. Lighthouse approach to one-hop localization
The lighthouse approach uses a base stationequipped with three mutually perpendicular paralleloptical beams to locate all optical receivers withinthe range and line-of-sight of the beams in R3. InSection 2.2.2, we have described the principle ofthe lighthouse approach to measure the distanceof an optical receiver to the rotational axis of a par-allel optical beam [24]. Without loss of generality,assuming the rotational axes of the three mutuallyperpendicular parallel optical beams are X, Y, andZ axes respectively. As shown in Fig. 8, ignoringthe measurement errors, the unknown receiver loca-tion xt = [xt,yt,zt]
T is related to the distance mea-surements to the X, Y, and Z axes, denoted by~dx; ~dy and ~dz, respectively, through the followingequations:
~d2x ¼ y2
t þ z2t ; ð33Þ
~d2y ¼ x2
t þ z2t ; ð34Þ
~d2z ¼ x2
t þ y2t : ð35Þ
Solving the above equations gives eight solutions,each corresponding a point in one of the eight quad-rants in R3. By using priori knowledge of whichquadrant the receiver is located in, only one solutionis chosen.

Fig. 8. An illustration of the lighthouse approach to localization.
2540 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
A practical system using the lighthouse approachfor 2D (XY plane) localization was reported to havea mean relative error of 1.1% in x axis (i.e.,1M
PMi¼1jxt;i � xt;ij=xt;i, M is the total number of receiv-
ers in the experiment) and a mean relative error of2.8% in y axis (i.e., 1
M
PMi¼1jyt;i � yt;ij=yt;i) [24]. Tech-
niques dealing with non-ideal situations such as mis-alignment of the rotational axes of optical beamsand non-parallel beams were also discussed in [24].
3.5. RSS-profiling based localization
Given the RSS model constructed using the pro-cedure described in Section 2.3, each non-anchornode unaware of its location uses the signal strengthmeasurements it collects, stemming from the anchornodes within its sensing region, and thus creates itsown RSS finger print, which is then transmitted tothe central station. Then the central station matchesthe presented signal strength vector to the RSSmodel, using probabilistic techniques or some kindof nearest neighbor-based method, which choosesthe location of a sample point whose RSS vectoris the closest match to that of the non-anchor nodeto be the estimated location of the non-anchor node[42]. In this way, an estimate of the location of thenon-anchor node can be obtained. The estimate istransmitted to the non-anchor node from the centralstation. Obviously, a non-anchor node could alsoobtain the full RSS model from the central stationand perform its own location estimation.
The accuracy of this technique depends on twodistinct factors: the particular technique used tobuild the RSS model, with the resultant quality ofthat model, and the technique used to fit the mea-sured signal strength vector from a non-anchornode into the appropriate part of the model. In
comparison with distance-estimation based tech-niques, the RSS-profiling based techniques producerelatively small location estimation errors [42]. In[35], Elnahrawy et al. proposed several area-basedlocalization algorithms using RSS profiling; thesealgorithms are area based because instead of esti-mating the exact location of the non-anchor node,they simply estimate a possible area that shouldcontain it. Two different performance parametersapply: accuracy, or the likelihood that an object iswithin the area, and precision, i.e., the size of thearea. Ref. [35] also considered three different tech-niques for the area based algorithms, viz., singlepoint matching, area based probability and Bayes-ian networks. The performance of all three algo-rithms was compared with the point basedalgorithm of [42]. The conclusion was that all algo-rithms performed similarly, with a fundamentallimit existing in the case of the RSS-profiling basedlocalization algorithms, a conclusion also consistentwith that of [65]. A rule of thumb is provided in [35].Using 802.11 technology, with dense sampling and agood algorithm, one can expect a median localiza-tion error (i.e., distance between the estimated loca-tion and the true location) of about 3 m and a 97thpercentile error of about 9 m. With relatively sparsesampling, every 6 m, or 37 m2/sample, one can stillachieve a median error of 4.5 m and 95th percentileerror of 12 m.
In [66], Ni et al. presented a weighted version ofthe RSS-profiling based localization techniquewhich achieves a more accurate location estimate.Denote by c the signal strength vector of the non-anchor node. Denote by bi and xi the signal strengthvector and the location vector of the ith samplepoint respectively. In the weighted version of theRSS-profiling based localization algorithm, thelocation estimate of the non-anchor point is givenby
xt ¼XN
i¼1
1kc�bik2PNi¼1
1kc�bik2
xi; ð36Þ
where kc � bik denotes the Euclidean distance be-tween the two vectors c and bi, and N is the totalnumber of sample points. Experimental evaluationshowed that Ni’s approach achieves a median local-ization error of 1 m and a maximum localization er-ror of 2 m, which appears to be better than thosereported in [67].
The major practical obstacle in the RSS-profilingbased localization is the extensive amount of profil-

G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2541
ing data required. Substantial and possibly costlyinitial experiments are needed to establish themodel. Subsequent changes in the environment(e.g., inside a building, office occupancy can change)can affect the model, and so a static model derivedfrom a single-shot experiment may be inadequatein some applications. Recently, there has been pro-posed a method of online profiling, which wouldreduce or possibly eliminate the amount of profilingrequired before deployment, but at the expense ofdeploying a large number of additional devices(termed ‘‘sniffers’’) at known locations [36,44].Together with a large number of stationary emitters(anchor nodes) deployed at known locations, the‘‘sniffers’’ can be used to construct and update theRSS model online.
3.6. Localization based on hybrid measurements
There are a number of other localization algo-rithms based on data fusion [68] of hybrid measure-ments. McGuire et al. explored data fusion of RSSand TOA measurements for mobile terminal locali-zation in a CDMA cellular network [69]. Li andZhuang considered mobile user localization usinghybrid TDOA/AOA measurements in a macrocellwideband CDMA system with frequency divisionduplex [70]. Gu and Gunawan considered mobileuser localization in a CDMA cellular network usinghybrid AOA/TOA measurements [71]. Kleine-Ost-mann and Bell [72] presented a data fusion architec-ture for combining TDOA and TOA measurements.Thomas et al. considered the fusion of TDOA andAOA measurements [73]. Catovic and Sahinoglu[74] computed the Cramer–Rao bounds on the loca-tion estimation accuracy of two different hybridschemes, i.e., TOA/RSS and TDOA/RSS, andfound that hybrid schemes offer improved accuracywith respect to conventional TOA and TDOAschemes. Fundamentally, localization based onhybrid measurements can achieve a performanceimprovement over that based on a single measure-ment type because measurement noise for differenttypes of measurements comes from different sources.Therefore errors in the location estimate for eachmeasurement type are at least partially independent.This independence between different types of mea-surements can be exploited by data fusion tech-niques [68] to create estimators that have betteraccuracy than estimators based on single measure-ment types. Among those hybrid techniques, thefusion of RSS and TOA measurements appears to
be the most attractive for a WSN because of itsrelatively simple hardware requirement.
4. Nonline-of-sight error mitigation
A common problem in many localization tech-niques is the nonline-of-sight (NLOS) error miti-gation. NLOS errors between two sensors canarise when either the line-of-sight between them isobstructed, perhaps by a building, or the line-of-sight measurements are contaminated by reflectedand/or diffracted signals. As NLOS error mitigationin AOA based localization [75–77] and distancebased localization [78–81] share some degree of com-monality, we review them together in this section.Most NLOS error mitigation techniques assume thatNLOS corrupted measurements only constitute asmall fraction of the total measurements. SinceNLOS corrupted measurements are inconsistentwith LOS expectations, they can be treated as outli-ers. A typical approach is to assume that the mea-surement error has a Gaussian distribution, thenthe least-squares residuals are examined to deter-mine if NLOS errors are present [76,80,81] (byregarding any large residual as due to the NLOS sig-nals). Unfortunately, this approach fails to workwhen multiple NLOS measurements are present asthe multiple outliers in the measurement tend to biasthe final estimate decision and reduce the residuals.This behavior motivates the use of deletion diagnos-tics. In deletion diagnostics, the effects of eliminatingvarious measurements from the total set are com-puted and ranked [80,82].
Some other approaches are proposed to reduceestimation errors for time-of-arrival (TOA) [79,83]and TDOA [75] respectively when the majority ofthe measurements are NLOS measurements. In[79], Venkatraman et al. employed a constrainednonlinear optimization approach for TOA NLOSerror mitigation in a cellular network. Bounds onthe NLOS error and the relationship between thetrue ranges are extracted from the geometry ofthe cell layout and the measured range circles toserve as constraints. Wang et al. proposed an algo-rithm which attempts to mitigate NLOS error effectin a TOA based location system, utilizing the infor-mation that NLOS error causes the measureddistance to be greater than the true distance. A qua-dratic programming approach is used to solve foran ML estimate of the source location [84]. Liand Zhuang proposed two NLOS error mitigationalgorithms assuming a full knowledge of NLOS

2542 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
error distribution (i.e., the probability that eachmeasurement is NLOS and the probability distribu-tion of NLOS error) and a partial knowledge ofNLOS error distribution (i.e., the probability thateach measurement is NLOS and the mean valueof the probability distribution of NLOS error)respectively [75]. However this prior informationmay be difficult to obtain in a WSN.
5. Connectivity based multi-hop localization
algorithms
In the following sections, we shall reviewmulti-hop localization techniques in which thenon-anchor nodes are not necessarily the one-hopneighbors of the anchors. In particular, we focuson connectivity-based and distance-based multi-hop localization algorithms due to their prevalencein multi-hop WSN localization techniques.
There is a distinct category of localization algo-rithms, called connectivity-based or ‘‘range free’’localization algorithms, which do not rely on anyof the measurement techniques in the earliersections. Instead they use the connectivity informa-tion, i.e., ‘‘who is within the communications rangeof whom’’ [85] to estimate the locations of the non-anchor nodes. The principle of these algorithms is: asensor being in the transmission range of anothersensor defines a proximity constraint between bothsensors, which can be exploited for localization.Bulusu et al. [86] and Niculescu and Nath [87] devel-oped distributed connectivity-based localizationalgorithms; Shang et al. [85] and Doherty et al.[88] developed centralized connectivity-based locali-zation algorithms.
In [86], Bulusu et al. defined a connectivity met-ric, which is the ratio of the number of transmittersignals successfully received to the total number ofsignals from that transmitter, to measure the qualityof communication for a specific transmitter-receiverpair. A receiver at an unknown location uses thecentroid of its reference points as its location esti-mate, where a reference point is a transmitter witha known location and whose connectivity metricexceeds a certain threshold (90% in [86]). An exper-iment was conducted in a 10 m · 10 m outdoorparking lot using four reference points placed atthe four corners of the 10 m · 10 m square. The10 m · 10 m square was subdivided into 100 smaller1 m · 1 m grids and the receivers were placed at thegrid points. Experimental results showed that forover 90% of the data points the localization error
falls within 30% of the separation distance betweentwo adjacent reference points.
The ‘‘DV (distance vector)-hop’’ approach devel-oped by Niculescu and Nath [87] starts with allanchors flooding their locations to other nodes inthe network. The messages are propagated hop-by-hop and there is a hop-count in the message.Each node maintains an anchor information tableand counts the least number of hops that it is awayfrom an anchor. When an anchor receives a messagefrom another anchor, it estimates the average dis-tance of one hop using the locations of both anchorsand the hop-count, and sends it back to the networkas a correction factor. When receiving the correc-tion factor, a non-anchor node is able to estimateits distance to anchors and performs trilaterationto estimate its location. The algorithm was testedusing simulation with a total of 100 nodes uniformlydistributed in a circular region of diameter 10. Theaverage node degree, i.e., average number of neigh-bors per node, is 7.6. Simulation results showed thatthe algorithm has a mean error of 45% transmissionrange with 10% anchors; and has a reduced meanerror of about 30% transmission range when thepercentage of anchors increases above 20%.
Shang et al. [85] developed a centralized algo-rithm by using multi-dimensional scaling (MDS).MDS was originally used in psychometrics and psy-chophysics and it is a set of data analysis techniquesthat displays the structure of distance-like data as ageometric picture. In their algorithm, the shortestpaths (i.e., the number of hops) between all pairsof nodes are first computed, which are used to con-struct a distance matrix for MDS. Then MDS isapplied to the distance matrix and an approximatevalue of the relative coordinates of each node isobtained. Finally, the relative coordinates are trans-formed to the absolute coordinates by aligning theestimated relative coordinates of anchors with theirabsolute coordinates. The location estimatesobtained using earlier steps can be refined using aleast-squares minimization. Simulation was con-ducted using 100 nodes uniformly distributed in asquare of size 10 · 10 and four anchors were ran-domly placed in the region. The average nodedegree is 10. Simulation results showed a localiza-tion error of 0.35. Shang et al. further improvedtheir algorithm in [89] by dividing the entire sensornetwork into overlapping local regions. Localiza-tion is performed in individual regions using the ear-lier described procedures. Then these local maps arepatched together to form a global map by using

G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2543
common nodes shared between adjacent regions.The improved algorithm can achieve better perfor-mance on irregularly shaped networks by avoidingthe use of distance information between far awaynodes. The improved algorithm can also be imple-mented in a distributed fashion.
In the centralized algorithm of Doherty et al.[88], the connectivity-based localization problem isformulated as a convex optimization problem andsolved using existing algorithms for solving linearprograms and semidefinite programming (SDP)algorithms. Semidefinite programs are a generaliza-tion of the linear programs and have the form
Minimize cTx ð37ÞSubject to FðxÞ ¼ F0 þ x1F1 þ � � � þ xnFn; ð38Þ
Ax < b; ð39ÞFi ¼ FT
i ; ð40Þ
where x = [x1,x2, . . . ,xn]T and xi represents thecoordinate vector of node i, i.e., xi = [xi,yi]. Thequantities A, b, c and Fi are all known. The inequal-ity (39) is known as a linear matrix inequality. Aconnection between node i and j can be representedby a ‘‘radial constraint’’ on the node locations:kxi � xjk 6 R, where R is the transmission range.This constraint is a convex constraint and can betransformed into a LMI using Schur complements[88]. A solution to the coordinates of the non-an-chor nodes satisfying the radial constraints can beobtained by leaving the objective function cTx blankand solving the problem. Because there may bemany possible coordinates of the non-anchor nodessatisfying the constraints, the solution may not beunique. If we set the element of c corresponding toxi (or yi) to be 1 (or �1) and all other elements ofc to be zero, the problem becomes a constrainedmaximization (or minimization) problem. A lowerbound or an upper bound on xi (or yi) satisfyingthe radial constraints can be computed, from whicha rectangular box bounding the location estimatesof the non-anchor nodes can be obtained. Thealgorithm was tested using simulation with a totalof 200 nodes randomly placed in a square of size10R · 10R and the average node degree is 5.7 [88].Simulation results showed that the mean locationerror is a monotonically decreasing function of thenumber of anchors. When the number of anchorsis small, the estimated location is as poor as a ran-dom guess of the node’s coordinates. The meanlocation error reduces to R when the number of
anchors increases to 18; it reduces to 0.5R whenthe number of anchors increases to 50.
In comparison with other localization algo-rithms, the most attractive feature of the connectiv-ity-based localization algorithms is their simplicity.However they can only provide a coarse grainedestimate of each node’s location, which means thatthey are only suitable for applications requiring anapproximate location estimate only. Also the local-ization error is highly dependent on the node den-sity of the network, the number of anchors andthe network topology. The location error will be lar-ger in a network with a smaller node density, feweranchors, or irregular network topology.
6. Distance-based multi-hop localization algorithms
The core of distance-based localization algo-rithms is the use of inter-sensor distance measure-ments in a sensor network to locate the entirenetwork.
Based on the approach of processing the individ-ual inter-sensor distance data, distance-based local-ization algorithms can be considered in two mainclasses: centralized algorithms and distributed algo-rithms. Centralized algorithms use a single centralprocessor to collect all the individual inter-sensordistance data and produce a map of the entire sen-sor network, while distributed algorithms rely onself-localization of each node in the sensor networkusing the distances the node measures and the localinformation it collects from its neighbors. Next wereview the main characteristics as well as relevantstudies in the literature for each of the two classesand compare them at the end of the section.
6.1. Centralized algorithms
In certain networks where a centralized informa-tion architecture already exists, such as road trafficmonitoring and control, environmental monitoring,health monitoring, and precision agriculture moni-toring networks, the measurement data of all thenodes in the network are collected in a central pro-cessor unit. In such a network, it is convenient touse a centralized localization scheme.
Once feasible to implement, the main motivebehind the interest in centralized localizationschemes is the likelihood of providing more accuratelocation estimates than those provided by distrib-uted algorithms. In the literature, there exist threemain approaches for designing centralized

2544 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
distance-based localization algorithms: multidimen-sional scaling (MDS), linear programming and sto-chastic optimization approaches.
The MDS approach used in the connectivity-based localization algorithms mentioned in Section5, e.g. [85], can be readily extended to incorporatedistance measurements into the corresponding opti-mization problem. Such an extension of the algo-rithm in [85] using the MDS approach can befound in [90]. In this work, the whole sensor net-work is divided into smaller groups where adjacentgroups may share common sensors. Each groupcontains at least three anchors or sensors whoselocations have already been estimated. MDS is usedto estimate the relative locations of sensors in eachgroup and build local maps. Local maps are thenstitched together to form an estimated global mapof the network by utilizing common sensorsbetween adjacent local maps. The estimated loca-tions of the anchors in this estimated global mapare later iteratively aligned with the true locationsof anchors to obtain the final estimated globalmap. Although this algorithm appears to have a dis-tributed architecture, since a large number of itera-tions (implies a high communication cost) arerequired for the algorithm to converge, it is moreappropriate to be implemented using a centralizedarchitecture. Ji’s algorithm was tested using a totalof 400 nodes (10% anchors) uniformly distributedin a square of 100 · 100 and a transmission rangeof R = 10. The distance measurement error wasassumed to be uniformly distributed in the range[0,g]. It was shown that when g is 0, 0.05R, 0.25R
and 0.5R, the localization error is 0.1R, 0.15R,0.3R and 0.45R respectively.
Similarly to the MDS approach, the semi-definiteprogramming (SDP) approach used for connec-tivity-based localization algorithms can also beextended to incorporate distance measurements[88]. In [91] the distance-based sensor network local-ization problem is formulated in a quadratic formand solved using SDP; and in [92] the result in[91] is improved using a gradient search procedureto fine-tune the initial solution obtained using SDP.
The stochastic optimization approach suggestsan alternative formulation and solution of the dis-tance-based localization problem using combinato-rial optimization notions and tools. The main toolused in this approach is the simulated annealing(SA) technique [93], which is a generalization ofthe well known Monte Carlo method in combinato-rial optimization. One particular property of the SA
method is its robustness against converging to afalse local minimum. In order to apply this tool tothe problem of localizing a sensor network with m
anchor nodes numbered from 1 to m and n non-anchor nodes numbered from m + 1 to m + n, thelocation estimation problem is reformulated in anoptimization framework as minimization of the costfunction
J ¼Xmþn
i¼mþ1
Xj2Ni
kxi � xjk � ~dij
�2 ð41Þ
over fxijmþ 1 6 i 6 mþ ng, where Ni, xi and ~dij de-note, respectively, the neighborhood of node i, theestimate of the location xi of node i, and the mea-sured distance between nodes i and j.
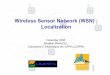
An algorithm to solve the above optimizationproblem using the SA method is provided in [93].The performance of this algorithm is improved in[94] utilizing the information about the sensor loca-tions hidden in the knowledge of whether a givenpair of sensors are neighbors and mitigating acertain kind of localization error caused by flipambiguity, a concept which is described in detailin Section 7. The effectiveness of the enhanced algo-rithm in [94] is also demonstrated via simulationswhere the relation between the actual value dij andthe measured value ~dij of the distance betweennodes i and j is assumed to be ~dij ¼ dijð1þ 0:1nijÞ,where nij is a zero-mean Gaussian noise of unit var-iance. The simulations were performed in a sensornetwork of 200 nodes uniformly distributed in asquare of size 10 by 10. The results of these simula-tions were compared with the ones obtained usingthe SDP approach with gradient search improve-ment [92] in Fig. 9, where the location estimationerror is normalized by the transmission range. Ascan be seen in the figure, the SA algorithm has bet-ter accuracy than the SDP algorithm with gradientsearch. This is an expected result of robustness ofSA against convergence to false local minima; how-ever it is worth noting that the computational costof the SA approach is higher.
6.2. Distributed localization
Similarly to the centralized ones, the distributeddistance-based localization approaches can beobtained as an extension of the distributed connec-tivity-based localization algorithms in Section 5 toincorporate the available inter-sensor distance infor-mation. In [87], after developing the ‘‘DV-hop’’

1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 20
50
100
150
200
250
Transmission Range
Loc
aliz
atio
n E
rror
(%
of
Tra
nsm
issi
on R
ange
)
SDP – 5% Anchor
SDP – 10% Anchor
SA – 5% Anchor
SA – 10% Anchor
Fig. 9. Performance of SA algorithm with flip ambiguity mitiga-tion and SDP algorithm with gradient search improvement.
G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2545
algorithm described in Section 5, a modified versionof this algorithm which includes distance measure-ments into the localization process, the ‘‘DV-dis-tance’’ algorithm, is presented as well. The mainidea in the ‘‘DV-distance’’ algorithm as comparedto the ‘‘DV-hop’’ algorithm is propagation of mea-sured distance among neighboring nodes instead ofhop count.
Two similar approaches are the two-stage locali-zation scheme of Savarese and Rabaey [95] and thefour-stage algorithm of Savvides et al. [96]. In thefirst stage of the scheme in [95], a ‘‘hop-terrain’’algorithm, which is similar to the ‘‘DV-hop’’ algo-rithm, is used to obtain an initial estimate of thenode locations. In the second stage, the measureddistances between neighboring nodes are used torefine the initial location estimates iteratively. Ateach iteration step, each node updates its locationestimate by a least-squares trilateration using thelocation estimates of its neighbors and the measureddistances. To mitigate location estimate errorscaused by error propagation and unfavorable net-work topologies, a confidence value is assigned toeach node’s location, where an anchor has a higherconfidence value (close to 1) and a non-anchor nodewith few neighbors and poor constellation has lowerconfidence value (close to 0). The proposed algo-rithm is tested via simulation as well in [95] usinga sample network with 400 nodes, 5% of whichare anchor nodes, uniformly placed in a 100 by100 square and an average node degree greater than7. The simulation results demonstrated that thealgorithm is able to achieve an average location esti-mation error of less than 33% of the transmission
range in the presence of 5% distance measurementerror (normalized by the transmission range).
The four-stage scheme of [96] is based on intro-duction of the notion of ‘‘tentative uniqueness’’,where a node is called ‘‘tentatively uniquely’’ local-izable if it has at least three neighbors that are eithernon-collinear anchors or ‘‘tentatively uniquely’’localizable nodes. In the first stage, the ‘‘tentativelyuniquely’’ localizable nodes are selected. The loca-tions of these tentatively uniquely localizable nodesare estimated in stages two and three. In the secondstage, each non-anchor node produces its estimateddistances to at least three anchors using a ‘‘DV-dis-tance’’ like algorithm. An estimated distance to ananchor node allows the location of the non-anchornode to be constrained inside a square centered atthat anchor node. In comparison with a circle, theuse of a square may simplify computation. The esti-mated distances to more than three anchors allowthe location of the non-anchor node to be confinedinside a rectangular box, which is the intersection ofthe squares corresponding to each of these anchors.The location of the non-anchor node is estimated tobe at the center of the rectangular box. The initiallocation estimates obtained in the second stage arerefined in the third stage by a least-squares trilater-ation using the location estimates of the neighboringnodes and the measured distances. In the final stageof the algorithm, the location of each node deemednot tentatively uniquely localizable in stage one isestimated using the location estimates of its tenta-tively uniquely localizable neighbors.
All of the above three algorithms [87,96,95] havethree phases [97]: (a) determination of the distancesbetween non-anchor nodes and anchor nodes; (b)derivation of the location of at least some non-anchor nodes from their distances to the anchors;(c) refinement of the location estimates using mea-sured distances between neighbors. In [97] the per-formances of the three algorithms and somevariants of them were compared and it was con-cluded that the algorithms have comparable perfor-mance and which algorithm has better accuracydepends on the specific application conditions suchas distance measurement error, vertex degree andpercentage of anchors. The algorithm proposed byNagpal et al. [98] more recently can be classified intothe same category as the above three algorithms.
There exists another category of distributedlocalization algorithms in the literature, where localmaps are constructed using distance measurementsbetween neighboring nodes first and then common

2546 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
nodes between local maps are used to stitch themtogether to form a global map. The localizationalgorithms by Ji and Zha [90] and Capkun et al.[99] are typical examples of this category. In thealgorithm of Capkun et al. [99], each node buildsits local coordinate system and the locations of itsneighbors are calculated in the local coordinate sys-tem. Then the directions of the local coordinate sys-tems are aligned to be the same using commonnodes between adjacent local coordinate systems.Finally, the local coordinate systems are reconciledinto a global coordinate system using linear transla-tion. Error propagation and the large number ofiterations required for the algorithm to convergeare the major problems in these algorithms.
A recent direction of research in distributed sen-sor network localization is the use of particle filters[100]. Particle filters have been used in navigationand tracking [101]. In [102], Ihler et al. formulatedthe sensor network localization problem as an infer-ence problem on a graphical model and applied avariant of belief propagation (BP) techniques, theso-called nonparametric belief propagation (NBP)algorithm, to obtain an approximate solution tothe sensor locations. In [102], the NBP idea is imple-mented as an iterative local message exchange algo-rithm, in each step of which each sensor nodequantifies its ‘‘belief’’ about its location estimate,sends this belief information to its neighbors,receives relevant messages from them, and then iter-atively updates its belief. The iteration process is ter-minated only when some convergence criterion ismet about the beliefs and location estimates of thesensors in the network. The main advantages ofthe NBP algorithm are its easy implementation ina distributed fashion and sufficiency of a small num-ber of iterations to converge. Furthermore it iscapable of providing information about locationestimation uncertainties and accommodating non-Gaussian distance measurement errors. It is demon-strated via simulations [102] that the overall perfor-mance of NBP is comparable to that of a centralizedMAP (maximum a posteriori) estimate. Some futureresearch directions to further improve the NBPapproach can be found in [102].
6.3. Centralized versus distributed algorithms
Centralized and distributed distance-based locali-zation algorithms can be compared from perspectivesof location estimation accuracy, implementation andcomputation issues, and energy consumption. It is
worth noting that decentralized localization isstrictly harder than centralized, i.e., any algorithmfor decentralized localization can always be appliedto centralized problems, but not the reverse.
From the perspective of location estimation accu-racy, centralized algorithms are likely to providemore accurate location estimates than distributedalgorithms. However centralized algorithms sufferfrom the scalability problem and generally are notfeasible to be implemented for large scale sensornetworks. Other disadvantages of centralized algo-rithms, as compared to distributed algorithms, aretheir requirement of higher computational complex-ity and lower reliability due to accumulated infor-mation inaccuracies/losses caused by multi-hoptransmission over a wireless network.
On the other hand, distributed algorithms aremore difficult to design because of the potentiallycomplicated relationship between local behaviorand global behavior, e.g., algorithms that are locallyoptimal may not perform well in a global sense.Optimal distribution of the computation of a cen-tralized algorithm in a distributed implementationin general is an unsolved research problem. Errorpropagation is another potential problem in distrib-uted algorithms. Moreover, distributed algorithmsgenerally require multiple iterations to arrive astable solution which may cause the localizationprocess to take longer time than the acceptable insome cases.
To compare the centralized and distributed dis-tance-based localization algorithms from the com-munication energy consumption perspective, oneneeds to consider the individual amounts of energyrequired for each type of operation in the localiza-tion algorithm in the specific hardware and thetransmission range setting. Depending on the set-ting, the energy required for transmitting a singlebit could be used to execute 1000–2000 instructions[103]. Centralized algorithms in large networksrequire each sensor’s measurements to be sent overmultiple hops to a central processor, while distrib-uted algorithms require only local informationexchange between neighboring nodes but many suchlocal exchanges may be required, depending on thenumber of iterations needed to arrive at a stablesolution. A comparison of the communicationenergy efficiencies of centralized and distributedalgorithms can be found in [104]. It was concludedin [104] that in general, if in a given sensor networkand distributed algorithm, the average number ofhops to the central processor exceeds the necessary

2
1 4
3
2
1 4
3
2
41
1
3
5
2
4
3
5
Fig. 10. An illustration of discontinuous deformations on non-globally rigid frameworks: (a) Flip ambiguity: vertex 4 can bereflected across the edge (2,3) to a new location without violatingthe distance constraints. (b) Discontinuous flex ambiguity:removing the edge (1,4), flexing the edge triple (1,5), (1,2),(2,3), and reinserting the edge (1,4) so that the distanceconstraints are not violated in the end, we obtain a newframework.
G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2547
number of iterations, then the distributed algorithmwill be more energy-efficient than a typical central-ized algorithm.
7. Graph theoretic research problems in distance-
based sensor network localization
Despite a significant number of approachesdeveloped for WSN localization, there are still manyunsolved problems in the area. The challenges to beaddressed are both in analytical characterization ofthe sensor networks (from the aspect of localization)and development of (efficient) localization algo-rithms for various classes of sensor networks undera variety of conditions. In this section, we presentsome of these research problems with a discussionon possible approaches to them. Although theseproblems may also exist in localization using othertypes of measurement techniques (e.g., TDOA andAOA), we focus on distance-based sensor networklocalization.
A fundamental problem in distance-based sensornetwork localization is whether a given sensor net-work is uniquely localizable or not. A frameworkthat is useful for analyzing and solving the problemis graph theory [105–109]. In a graph theoreticalframework, a sensor network can be represented bya graph G = (V,E) with a vertex set V and an edgeset E, where each vertex i 2 V is associated with asensor node si in the network, and each edge(i, j) 2 E corresponds to a sensor pair si, sj for whichthe inter-sensor distance dij is known. The locationinformation about the sensors corresponds to a rep-
resentation of the representative graph. In general, ad-dimensional (d 2 {2,3}) representation of a graphG = (V,E) is a mapping p : V ! Rd , which assignsa location in Rd to each vertex in V. Given a graphG = (V,E) and a d-dimensional representation of it,the pair ðG; pÞ is called a d-dimensional framework.
A particular graph property associated withunique localizability of sensor networks is global
rigidity [106,108,109]. A framework ðG; pÞ is glob-ally rigid if every framework ðG; p1Þ satisfyingkpðiÞ � pðjÞk ¼ kp1ðiÞ � p1ðjÞk for any vertex pairi, j 2 V, which are connected by an edge in E, alsosatisfies the same equality for any other vertex pairsthat are not connected by a single edge. A relaxedform of global rigidity is rigidity: A frameworkðG; pÞ is rigid if there exists a sufficiently small posi-tive constant e such that every framework ðG; p1Þsatisfying (i) kpðiÞ � p1ðiÞk < e for all i 2 V and (ii)kpðiÞ � pðjÞk ¼ kp1ðiÞ � p1ðjÞk for any vertex pair
i, j 2 V, which are connected by an edge in E, alsosatisfies the equality in (ii) for any other vertex pairsthat are not connected by a single edge.
If a framework ðG; pÞ is rigid but not globallyrigid, like the ones in Fig. 10, there exist two typesof discontinuous deformations that can prevent arepresentation of G consistent with p, i.e., a repre-sentation ðG; p1Þ satisfying kpðiÞ � pðjÞk ¼ kp1ðiÞ�p1ðjÞk for any vertex pair i, j 2 V, which are con-nected by an edge in E, from being unique (in thesense that it differs from other such representationsat most by translation, rotation or reflection)[107,110]: flip and discontinuous flex ambiguities. Inflip ambiguities in Rd , (d 2 {2,3}), at least a vertex(sensor node) v has a set of neighbors which spana (d � 1)-dimensional subspace, which leads to thepossibility of the neighbors forming a mirrorthrough which v can be reflected. Fig. 10a depictsan example of flip ambiguity. In discontinuous flexambiguities, the temporary removal of an edge or,in some cases, a set of edges allows the remainingpart of the graph to be flexed to a different realiza-tion (which cannot be obtained from the originalrealization by translation, rotation or reflection)and the removed edge reinserted with the samelength. Fig. 10b depicts an example.
Use of graph rigidity and global rigidity notionsin sensor network localization are well describedand their importance is well demonstrated fromboth the algorithmic and the analytic aspects inthe recent literature [106,98,108,111]. Particularly,it is established in [105,106] that a necessary and suf-ficient condition for unique localization of a d-dimensional sensor network is global rigidity ofany d-dimensional representation ðG; pÞ, where G
is the representative graph of the sensor networkand the edge lengths kpðiÞ � pðjÞk imposed by p

2548 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
are equal to the corresponding known inter-sensordistances dij, assuming that the absolute positionsof at least three sensors in R2 (which do not lie onthe same line) or four sensors in R3 (which do notlie on the same plane) are known. Formal statementof this relation can be found in [105,106].
Note that the necessity of global rigidity forunique localization as stated is valid for general sit-uations where other a priori information is not help-ful. Rigidity is needed, in any case, to have a finitenumber of solutions. However, in some cases whereðG; pÞ is rigid but not globally rigid, some additionala priori information may compensate the need forglobal rigidity. For example, consider a sensor net-work that can be represented by a unit disk graph,where there is an edge between representative verti-ces of two sensor nodes if and only if the distancebetween them is less than a certain thresholdR > 0, which is called the transmission range orsensing radius [106]. Then the ambiguities due tothe non-globally rigid nature of the representativegraph may sometimes be eliminated using the unitdisk graph properties as demonstrated in Fig. 11.In practice, a wireless sensor always has a limitedtransmission range, which implies that a WSNmay have the property of a unit disk graph. There-fore global rigidity is only a sufficient condition forunique localization of a WSN; the necessary condi-tion for unique localization is still an open researchproblem.
A more challenging research problem is analyz-ing the characteristics of wireless sensor networks(from the aspect of localization) in the case of noisy
3
24 (Case 2)
1
4 (Case 1)
R
Fig. 11. Localization of a non-globally rigid unit-disk frameworkin R2: assume that the location of vertices 1, 2, 3 and the lengthsof the edges (2,4) and (3,4) are known and that there is no edgebetween 1 and 4. There exist two possible locations for vertex 4 ingeneral: Case 1 and Case 2. We can eliminate Case 2 using theunit-disk property since for this case there had to be an edgebetween vertices 1 and 4 since d14 < R. Hence Case 1 gives thecorrect unique location of vertex 4.
distance measurements. We have little knowledge inthis area. For example, it is a common knowledgethat in the presence of noisy distance measurements,a node (in R2) is likely to have flip ambiguity prob-lem if its neighbors are nearly collinear. Howeverthere is little work in quantifying this relationship.A recent work focusing on robust distributed local-ization of sensor networks with certain distancemeasurement errors and ambiguities caused bythese errors is presented in [107]. In this paper, cer-tain criteria are provided in selection of the sub-graphs of the representative graph of a network tobe used in a localization algorithm robust againstsuch errors. The analysis in [107], however, is notcomplete and there may be other criteria that maybetter characterize robustness of a given sub-net-work against distance measurement errors.
Another relevant research problem is under-standing and utilizing the error propagation charac-teristics in a sensor network. This issue emergesespecially in estimation of the location of non-immediate neighbors of anchor sensors, i.e., k-hopneighbors of anchor nodes with k P 2. Other thingsbeing equal, a node further away from anchor nodesis likely to have a larger location estimation error,because its location estimation error is not onlyaffected by the distance measurement errors to itsneighbors but also affected by the location estima-tion errors of its neighbors using which the node’slocation is estimated. Numerous simulations andexperimental studies suggested that in addition todistance measurement error, error propagation (aswell as location estimation error) may be affectedby node degree, network topology, and the distribu-tion of both non-anchor and anchor nodes. Some ofthe related tools can be seen in [102]. Other relevantwork includes the papers by Niculescu and Nath[112] and by Savvides et al. [113]. In [112], Niculescuand Nath used a combination of the Cramer–Raobound and simulations to investigate the error char-acteristics of four classes of multi-hop APS (Ad Hocpositioning systems) algorithms. In [113] Savvideset al. also used a combination of the Cramer–Raobound and simulations to investigate the error char-acteristics for a specific scenario in which anchorsare located near the boundary of the region andnon-anchor nodes are located inside the region.Some qualitative trends on how localization errorvaries with average node degree, number of anchorsand distance to anchors are observed. A potentialproblem with using the Cramer–Rao bound tostudy the performance of a localization algorithm

G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2549
is that the Cramer–Rao bound assumes the underly-ing estimator is unbiased. This assumption needs tobe validated with the estimators used in variouslocalization algorithms, and in particular, the classof algorithms which minimize the sum of the squareof the difference between measured distances andestimated distances. The aforementioned flip ambi-guity and discontinuous flex ambiguity problemsmake such validation particularly difficult. An esti-mator may produce an unbiased estimate in onetopology (e.g., a dense network with high nodedegree) but give a biased estimate in another topol-ogy (e.g., a spare network with low node degree).We are yet to develop more comprehensive knowl-edge in this large and fascinating area.
Still another research area is concerned withreducing the computational complexity of locationalgorithms. It is concluded in the literature thatthe computational complexity of an arbitrary loca-tion procedure is, in general, exponential in thenumber of sensor nodes, unless an iterative proce-dure is applied to sensor networks with certain clas-ses of representative graphs such as trilateration andquadrilateration graphs [108,105,106]. Since trilater-ation and quadrilateration representative graphsprovide proven reduced computational complexityin localization and actually there are systematicmethods to locate networks with such representativegraphs, it is of interest to develop mechanisms tomake these methods applicable for certain otherclasses of representative graphs as well.
Finally, we note current interest in characterizingstatistical properties of random sensor networkswhich will ensure, at least with high probability,that the network is localizable, or even possessestrilateration structure, so that localization computa-tions are straightforward and indeed decentralizable[105,108,114].
8. Summary
Wireless sensor network localization hasattracted significant research interest. This interestis expected to grow further with the proliferationof wireless sensor network applications. This paperhas provided a review of the measurement tech-niques in WSN localization and the correspondinglocalization algorithms. These localization algo-rithms were divided into one-hop localization algo-rithms and multi-hop localization algorithms. Adetailed investigation on connectivity-based anddistance-based localization algorithms were pre-
sented because of their popularity in wireless sensornetwork localization. Despite significant researchdevelopments in the area, there are still quite manyunsolved problems in wireless sensor network local-ization. A discussion on some fundamental researchproblems in distance-based location and possibleapproaches to these problem was also presented inthis paper.
Acknowledgment
The authors would like to thank the anonymousreviewers for their helpful comments which havesignificantly improved the quality of the paper.
References
[1] C.-Y. Chong, S. Kumar, Sensor networks: evolution,opportunities, and challenges, Proceedings of the IEEE 91(8) (2003) 1247–1256.
[2] S. Guolin, C. Jie, G. Wei, K.J.R. Liu, Signal processingtechniques in network-aided positioning: a survey of state-of-the-art positioning designs, IEEE Signal ProcessingMagazine 22 (4) (2005) 12–23.
[3] A.H. Sayed, A. Tarighat, N. Khajehnouri, Network-basedwireless location: challenges faced in developing techniquesfor accurate wireless location information, IEEE SignalProcessing Magazine 22 (4) (2005) 24–40.
[4] F. Gustafsson, F. Gunnarsson, Mobile positioning usingwireless networks: possibilities and fundamental limitationsbased on available wireless network measurements, IEEESignal Processing Magazine 22 (4) (2005) 41–53.
[5] N. Patwari, J. Ash, S. Kyperountas, I. Hero, A.O.R.Moses, N. Correal, Locating the nodes: cooperative local-ization in wireless sensor networks, IEEE Signal ProcessingMagazine 22 (4) (2005) 54–69.
[6] D. Koks, Numerical calculations for passive geolocationscenarios, Tech. Rep. DSTO-RR-0000, 2005.
[7] T. Rappaport, J. Reed, B. Woerner, Position location usingwireless communications on highways of the future, IEEECommunications Magazine 34 (10) (1996) 33–41.
[8] T.E. Biedka, J.H. Reed, B.D. Woerner, Direction findingmethods for CDMA systems, in: Thirteenth AsilomarConference on Signals, Systems and Computers, vol. 1,1996, pp. 637–641.
[9] D.W. Bliss, K.W. Forsythe, Angle of arrival estimation inthe presence of multiple access interference for CDMAcellular phone systems, in: Proceedings of the 2000 IEEESensor Array and Multichannel Signal Processing Work-shop, 2000, pp. 408–412.
[10] I. Ziskind, M. Wax, Maximum likelihood localization ofmultiple sources by alternating projection, IEEE Transac-tions on Acoustics, Speech, and Signal Processing 36 (10)(1988) 1553–1560.
[11] L. Jian, B. Halder, P. Stoica, M. Viberg, Computationallyefficient angle estimation for signals with known wave-forms, IEEE Transactions on Signal Processing 43 (9)(1995) 2154–2163.

2550 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
[12] B. Halder, M. Viberg, T. Kailath, An efficient non-iterativemethod for estimating the angles of arrival of knownsignals, in: The Twenty-Seventh Asilomar Conference onSignals, Systems and Computers, 1993, pp. 1396–1400.
[13] B.G. Agee, Copy/DF approaches for signal specific emitterlocation, in: Conference Record of the Twenty-FifthAsilomar Conference on Signals, Systems and Computers,vol. 2, 1991, pp. 994–999.
[14] R. Schmidt, ‘‘Multiple emitter location and signal param-eter estimation, IEEE Transactions on Antennas andPropagation 34 (3) (1986) 276–280.
[15] R. Roy, T. Kailath, ESPRIT-estimation of signal param-eters via rotational invariance techniques, IEEE Transac-tions on Acoustics, Speech, and Signal Processing 37 (7)(1989) 984–995.
[16] A. Paulraj, R. Roy, T. Kailath, A subspace rotationapproach to signal parameter estimation, Proceedings ofthe IEEE 74 (7) (1986) 1044–1046.
[17] N. Tayem, H.M. Kwon, Conjugate ESPRIT (C-SPRIT),IEEE Transactions on Antennas and Propagation 52 (10)(2004) 2618–2624.
[18] A. Barabell, Improving the resolution performance ofeigenstructure-based direction-finding algorithms, in: IEEEInternational Conference on Acoustics, Speech, and SignalProcessing, vol. 8, 1983, pp. 336–339.
[19] M. Kaveh, A. Bassias, Threshold extension based on a newparadigm for MUSIC-type estimation, in: InternationalConference on Acoustics, Speech, and Signal Processing,vol. 5, 1990, pp. 2535–2538.
[20] R. Kumaresan, D.W. Tufts, Estimating the angles of arrivalof multiple plane waves, IEEE Transactions on Aerospaceand Electronic Systems AES-19 (1983) 134–139.
[21] J.W. Pierre, M. Kaveh, Experimental evaluation of higher-resolution direction-finding algorithms using a calibratedsensor array testbed, Digital Signal Processing 5 (1995)243–254.
[22] R. Klukas, M. Fattouche, Line-of-sight angle of arrivalestimation in the outdoor multipath environment, IEEETransactions on Vehicular Technology 47 (1) (1998) 342–351.
[23] S.V. Schell, W.A. Gardner, High-resolution direction find-ing, Handbook of Statistics 10 (1993) 755–817.
[24] K. Romer, The lighthouse location system for smart dust,in: Proceedings of MobiSys 2003 (ACM/USENIX Confer-ence on Mobile Systems, Applications, and Services), 2003,pp. 15–30.
[25] D. McCrady, L. Doyle, H. Forstrom, T. Dempsey, M.Martorana, Mobile ranging using low-accuracy clocks,IEEE Transactions on Microwave Theory and Techniques48 (6) (2000) 951–958.
[26] G. Carter, Coherence and Time Delay Estimation, IEEEPress, Piscataway, NJ, 1993.
[27] C. Knapp, G. Carter, The generalized correlation methodfor estimation of time delay, IEEE Transaction on Acous-tics, Speech, Signal Processing 24 (4) (1976) 320327.
[28] N.B. Priyantha, A. Chakraborty, H. Balakrishnan, Thecricket location-support system, in: Proceedings of the SixthAnnual ACM International Conference on Mobile Com-puting and Networking, 2000, pp. 32–43.
[29] J.-Y. Lee, R. Scholtz, Ranging in a dense multipathenvironment using an UWB radio link, IEEE Journal onSelected Areas in Communications 20 (9) (2002) 1677–1683.
[30] S. Gezici, Z. Tian, G. Giannakis, H. Kobayashi, A.Molisch, H. Poor, Z. Sahinoglu, Localization via ultra-wideband radios: a look at positioning aspects for futuresensor networks, IEEE Signal Processing Magazine 22 (4)(2005) 70–84.
[31] G. Carter, Time delay estimation for passive sonar signalprocessing, IEEE Transactions on Acoustics, Speech, andSignal Processing 29 (3) (1981) 463–470.
[32] W.A. Gardner, C.K. Chen, Signal-selective time-difference-of-arrival estimation for passive location of man-madesignal sources in highly corruptive environments. I. Theoryand method, IEEE Transactions on Signal Processing 40 (5)(1992) 1168–1184.
[33] C.K. Chen, W.A. Gardner, Signal-selective time-differenceof arrival estimation for passive location of man-madesignal sources in highly corruptive environments. II. Algo-rithms and performance, IEEE Transactions on SignalProcessing 40 (5) (1992) 1185–1197.
[34] P. Bergamo, G. Mazzini, Localization in sensor networkswith fading and mobility, in: The 13th IEEE InternationalSymposium on Personal, Indoor and Mobile Radio Com-munications, vol. 2, 2002, pp. 750–754.
[35] E. Elnahrawy, X. Li, R. Martin, The limits of localizationusing signal strength: a comparative study, in: First AnnualIEEE Conference on Sensor and Ad-hoc Communicationsand Networks, 2004, pp. 406–414.
[36] D. Madigan, E. Einahrawy, R. Martin, W.-H. Ju,P. Krishnan, A. Krishnakumar, Bayesian indoor position-ing systems, in: IEEE INFOCOM 2005, vol. 2, 2005, pp.1217–1227.
[37] D. Niculescu, B. Nath, Localized positioning in ad hocnetworks, in: IEEE International Workshop on SensorNetwork Protocols and Applications, 2003, pp. 42–50.
[38] N. Patwari, A. Hero, M. Perkins, N. Correal, R. O’Dea,Relative location estimation in wireless sensor networks,IEEE Transactions on Signal Processing 51 (8) (2003) 2137–2148.
[39] T.S. Rappaport, Wireless Communications: Principles andPractice, second ed., Prentice Hall PTR, 2001.
[40] D.C. Cox, R. Murray, A. Norris, 800mhz attenuationmeasured in and around suburban houses, AT&T BellLaboratory Technical Journal 673 (6) (1984) 921–954.
[41] R. Bernhardt, Macroscopic diversity in frequency reuseradio systems, IEEE Journal on Selected Areas in Com-munications 5 (5) (1987) 862–870.
[42] P. Bahl, V. Padmanabhan, RADAR: an in-building RF-based user location and tracking system, in IEEE INFO-COM, vol. 2, 2000, pp. 775–784.
[43] P. Prasithsangaree, P. Krishnamurthy, P. Chrysanthis, Onindoor position location with wireless LANs, in The 13thIEEE International Symposium on Personal, Indoor andMobile Radio Communications, vol. 2, 2002, pp. 720–724.
[44] P. Krishnan, A. Krishnakumar, W.-H. Ju, C. Mallows, S.Gamt, A system for LEASE: location estimation assisted bystationary emitters for indoor RF wireless networks, in:IEEE INFOCOM, vol. 2, 2004, pp. 1001–1011.

G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2551
[45] T. Roos, P. Myllymaki, H. Tirri, A statistical modelingapproach to location estimation, IEEE Transactions onMobile Computing 1 (1) (2002) 59–69.
[46] S. Ray, W. Lai, I. Paschalidis, Deployment optimization ofsensornet-based stochastic location-detection systems, in:IEEE INFOCOM 2005, vol. 4, 2005, pp. 2279–2289.
[47] D.J. Torrieri, Statistical theory of passive location systems,IEEE Transactions on Aerospace and Electronic SystemsAES-20 (2) (1984) 183–198.
[48] M. Gavish, A.J. Weiss, Performance analysis of bearing-only target location algorithms, IEEE Transactions onAerospace and Electronic Systems 28 (3) (1992) 817–828.
[49] R.G. Stanfield, Statistical theory of DF finding, Journal ofIEE 94 (5) (1947) 762–770.
[50] C.J. Ancker, Airborne direction finding – theory ofnavigation errors, IRE Transactions on Aeronautical andNavigational Electronics 5 (1958) 199–210.
[51] W.H. Foy, Position-location solutions by Taylor-seriesestimation, IEEE Transaction on Aerospace and ElectronicSystems AES-12 (2) (1976) 187–194.
[52] J.L. Poirot, G.V. McWilliams, Application of linear statis-tical models to radar location techniques, IEEE Transac-tion on Aerospace and Electronic Systems AES-10 (1974)830–834.
[53] S. Bancroft, Algebraic solution of the GPS equations, IEEETransactions on Aerospace and Electronic Systems AES-21(1) (1985) 56–59.
[54] B.T. Fang, Simple solutions for hyperbolic and relatedposition fixes, IEEE Transactions on Aerospace andElectronic Systems 26 (5) (1990) 748–753.
[55] J. Smith, J. Abel, The spherical interpolation method ofsource localization, IEEE Journal of Oceanic Engineering12 (1) (1987) 246–252.
[56] J.S. Abel, A divide and conquer approach to least-squaresestimation, IEEE Transactions on Aerospace and Elec-tronic Systems 26 (2) (1990) 423–427.
[57] Y.T. Chan, K.C. Ho, A simple and efficient estimator forhyperbolic location, IEEE Transactions on Signal Process-ing 42 (8) (1994) 1905–1915.
[58] K. Dogancay, Emitter localization using clustering-basedbearing association, IEEE Transactions on Aerospace andElectronic Systems 41 (2) (2005) 525–536.
[59] S. Drake, K. Dogancay, Geolocation by time difference ofarrival using hyperbolic asymptotes, in: IEEE InternationalConference on Acoustics, Speech, and Signal Processing,vol. 2, 2004, pp. ii-361-4.
[60] G.M. Crippen, T.F. Havel, Distance Geometry and Molec-ular Conformation, John Wiley and Sons Inc., New York,1988.
[61] L.M. Blumenthal, Theory and Applications DistanceGeometry, Oxford University Press, 1953.
[62] M. Cao, B.D.O Anderson, A.S. Morse, Localization withimprecise distance information in sensor networks, in:Proceedings of the Joint IEEE Conference on Decision andControl and European Control Conference, 2005, pp.2829–2834.
[63] M. Cao, A.S. Morse, B.D.O. Anderson, Sensor networklocalization with imprecise distances, Systems and ControlLetters 55 (2006) 887–893.
[64] A.N. Bishop, P.N. Pathirana, B. Fidan, B.D.O. Anderson,G. Mao, Passive angle measurement based localizationconsistency via geometric constraints, Information, Deci-sion and Control, to appear.
[65] R. Battiti, M. Brunato, A. Villani, Statistical learningtheory for location fingerprinting in wireless LANs,Informatica e Telecomunicazioni, University of Trento,Tech. Rep. DIT-02-086, October 2002.
[66] L.M. Ni, L. Yunhao, L. Yiu Cho, A.P. Patil, LANDM-ARC: indoor location sensing using active RFID, in:Proceedings of the First IEEE International Conferenceon Pervasive Computing and Communications (PerCom2003), 2003, pp. 407–415.
[67] P. Bahl, V.N. Padmanabhan, A. Balachandran, Enhance-ment to the RADAR user location and tracking system,Microsoft Research Technical Report MSR-TR-2000-12,February 2000.
[68] D.L. Hall, Mathematical Techniques in Multisensor DataFusion, Artech House Publishers, 2004.
[69] M. McGuire, K.N. Plataniotis, A.N. Venetsanopoulos,Data fusion of power and time measurements for mobileterminal location, IEEE Transactions on Mobile Comput-ing, 1536-1233 4 (2) (2005) 142–153.
[70] C. Li, W. Zhuang, Hybrid TDOA/AOA mobile userlocation for wideband CDMA cellular systems, IEEETransactions on Wireless Communications 1 (3) (2002)439–447.
[71] Z. Gu, E. Gunawan, Radiolocation in CDMA cellularsystem based on joint angle and delay estimation, WirelessPersonal Communications 23 (3) (2002) 297–309.
[72] T. Kleine-Ostmann, A.E. Bell, A data fusion architecturefor enhanced position estimation in wireless networks,IEEE Communications Letters 5 (8) (2001) 343–345.
[73] N. Thomas, D. Cruickshank, D. Laurenson, Performanceof TDOA-AOA hybrid mobile location system, in: Pro-ceedings International Conference on 3G Mobile Commu-nication Technologies, 2001, pp. 216–220.
[74] A. Catovic, Z. Sahinoglu, The Cramer–Rao bounds ofhybrid TOA/RSS and TDOA/RSS location estimationschemes, IEEE Communications Letters 8 (10) (2004) 626–628.
[75] C. Li, W. Zhuang, Nonline-of-sight error mitigation inmobile location, IEEE Transactions on Wireless Commu-nications 4 (2) (2005) 560–573.
[76] X. Li, A selective model to suppress NLOS signals in angle-of-arrival (AOA) location estimation, in: The Ninth IEEEInternational Symposium on Personal, Indoor and MobileRadio Communications, vol. 1, 1998, pp. 461–465.
[77] S.-S. Woo, H.-R. You, J.-S. Koh, The NLOS mitigationtechnique for position location using IS-95 CDMA net-works, in: 52nd Vehicular Technology Conference, IEEEVTS-Fall VTC 2000, vol. 6, 2000, pp. 2556–2560.
[78] S. Gezici, H. Kobayashi, H.V. Poor, Nonparametricnonline-of-sight identification, in: IEEE 58th VehicularTechnology Conference, VTC 2003-Fall, vol. 4, 2003, pp.2544–2548.
[79] S. Venkatraman, J. Caffery, Y. Heung-Ryeol, A novel TOAlocation algorithm using LoS range estimation for NLOSenvironments, IEEE Transactions on Vehicular Technol-ogy, 0018-9545 53 (5) (2004) 1515–1524.

2552 G. Mao et al. / Computer Networks 51 (2007) 2529–2553
[80] P.-C. Chen, A non-line-of-sight error mitigation algorithmin location estimation, in: IEEE Wireless Communicationsand Networking Conference, 1999, pp. 316–320.
[81] M.P. Wylie, J. Holtzman, The non-line of sight problem inmobile location estimation, in: 5th IEEE InternationalConference on Universal Personal Communications, vol. 2,1996, pp. 827–831.
[82] L. Cong, W. Zhuang, Non-line-of-sight error mitigation inTDOA mobile location, in: IEEE Global Telecommunica-tions Conference, GLOBECOM ’01, vol. 1, 2001, pp. 680–684.
[83] M.P. Wylie-Green, S.S. Wang, Robust range estimation inthe presence of the non-line-of-sight error, in: IEEE VTS54th Vehicular Technology Conference, VTC 2001 Fall,vol. 1, 2001, pp. 101–105.
[84] X. Wang, Z. Wang, B. O’Dea, A TOA-based locationalgorithm reducing the errors due to non-line-of-sight(NLOS) propagation, IEEE Transactions on VehicularTechnology 52 (1) (2003) 112–116.
[85] Y. Shang, W. Ruml, Y. Zhang, M. Fromherz, Localizationfrom connectivity in sensor networks, IEEE Transactionson Parallel and Distributed Systems 15 (11) (2004) 961–974.
[86] N. Bulusu, J. Heidemann, D. Estrin, GPS-less low-costoutdoor localization for very small devices, IEEE PersonalCommunications 7 (5) (2000) 28–34.
[87] D. Niculescu, B. Nath, Ad hoc positioning system (APS),in: IEEE GLOBECOM, vol. 5, 2001, pp. 2926–2931.
[88] L. Doherty, K. Pister, L. El Ghaoui, Convex positionestimation in wireless sensor networks, in: IEEE INFO-COM, vol. 3, 2001, pp. 1655–1663.
[89] Y. Shang, W. Ruml, Improved MDS-based localization, in:IEEE INFOCOM 2004, vol. 4, 2004, pp. 2640–2651.
[90] X. Ji, H. Zha, Sensor positioning in wireless ad-hoc sensornetworks using multidimensional scaling, in: IEEE INFO-COM, vol. 4, 2004, pp. 2652–2661.
[91] P. Biswas, Y. Ye, Semidefinite programming for ad hocwireless sensor network localization, in: Third InternationalSymposium on Information Processing in Sensor Net-works, 2004, pp. 46–54.
[92] T.-C. Liang, T.-C. Wang, Y. Ye, A gradient search methodto round the semidefinite programming relaxation for adhoc wireless sensor network localization, Standford Uni-versity, Tech. Rep., August 26, 2004.
[93] A.A. Kannan, G. Mao, B. Vucetic, Simulated annealingbased localization in wireless sensor network, in: The 30thIEEE Conference on Local Computer Networks, 2005, pp.513–514.
[94] A.A. Kannan, G. Mao, B. Vucetic, Simulated annealingbased wireless sensor network localization with flip ambi-guity mitigation, in: 63rd IEEE Vehicular TechnologyConference, 2006, pp. 1022– 1026.
[95] C. Savarese, J. Rabaey, Robust positioning algorithms fordistributed ad-hoc wireless sensor networks, in: Proceedingsof the General Track: 2002 USENIX Annual TechnicalConference, 2002, pp. 317–327.
[96] A. Savvides, H. Park, M.B. Srivastava, The bits and flops ofthe n-hop multilateration primitive for node localizationproblems, in: International Workshop on Sensor NetworksApplication, 2002, pp. 112–121.
[97] K. Langendoen, N. Reijers, Distributed localization inwireless sensor networks: a quantative comparison, Com-puter Networks 43 (2003) 499–518.
[98] R. Nagpal, H. Shrobe, J. Bachrach, Organizing a globalcoordinate system from local information on an ad hocsensor network, in: Proc. Sensor Networks 2nd Interna-tional Workshop Inform, 2003.
[99] S. Capkun, M. Hamdi, J. Hubaux, GPS-free positioning inmobile ad-hoc networks, in: 34th Hawaii InternationalConference on System Sciences, 2001, pp. 3481–3490.
[100] C. Kwok, D. Fox, M. Meila, Real-time particle filters,Proceedings of the IEEE 92 (3) (2004) 469–484.
[101] V. Fox, J. Hightower, L. Lin, D. Schulz, G. Borriello,Bayesian filtering for location estimation, IEEE PervasiveComputing 2 (3) (2003) 24–33.
[102] A. Ihler, I. Fisher, J.W. R. Moses, A. Willsky, Nonpara-metric belief propagation for self-localization of sensornetworks, IEEE Journal on Selected Areas in Communica-tions 23 (4) (2005) 809–819.
[103] J. Chen, K. Yao, R. Hudson, Source localization andbeamforming, IEEE Signal Processing Magazine 19 (2)(2002) 30–39.
[104] M. Rabbat, R. Nowak, Distributed optimization in sensornetworks, in: Third International Symposium on Informa-tion Processing in Sensor Networks, 2004, pp. 20–27.
[105] T. Eren, D. Goldenberg, W. Whiteley, R. Yang, A.S.Morse, B.D.O. Anderson, P. Belhumeur, Rigidity andrandomness in network localization, in: IEEE INFOCOM,vol. 4, 2004, pp. 2673–2684.
[106] J. Aspnes, T. Eren, D. Goldenberg, A.S. Morse, W.Whiteley, Y. Yang, B.D.O. Anderson, P. Belhumeur, Atheory of network localization, IEEE Transactions onMobile Computing 5 (12) (2006) 1663–1678.
[107] D. Moore, J. Leonard, D. Rus, S. Teller, Robust distrib-uted network localization with noisy range measurements,in: The 2nd ACM Conference on Embedded NetworkedSensor Systems (SenSys’04), 2004, pp. 50–61.
[108] B.D.O. Anderson, P. Belhumeur, T. Eren, D. Goldenberg,A.S. Morse, W. Whiteley, R. Yang, Graphical properties ofeasily localizable sensor networks, Wireless Networks,submitted for publication.
[109] R. Connelly, Generic global rigidity, Discrete and Compu-tational Geometry 33 (2005) 549–563.
[110] B. Hendrickson, Conditions for unique graph realizations,SIAM Journal on Computing 21 (1) (1992) 65–84.
[111] D. Goldenberg, A. Krishnamurthy, W. Maness, R. Yang,A. Young, A.S. Morse, A. Savvides, B.D.O. Anderson,Network localization in partially localizable networks, in:IEEE INFOCOM, vol. 1, 2005, pp. 313–326.
[112] D. Niculescu, B. Nath, Error characteristics of ad hocpositioning systems (APS), in: The 5th ACM internationalsymposium on Mobile ad hoc networking and computing,2004, pp. 20–30.
[113] A. Savvides, W.L. Garber, R.L. Moses, M.B. Srivastava,An analysis of error inducing parameters in multihopsensor node localization, IEEE Transactions on MobileComputing 4 (6) (2005) 567–577.
[114] D.K. Goldenberg, P. Bihler, M. Cao, J. Fang, B.D.O.Anderson, A.S. Morse, Y.R. Yang, Localization in sparse

G. Mao et al. / Computer Networks 51 (2007) 2529–2553 2553
networks using sweeps, in: Proceedings of ACM MOBI-COM, 2006, pp. 110–121.
Guoqiang Mao received the Bachelordegree in electrical engineering, Masterdegree in engineering and Ph.D. in tele-communications engineering in 1995,1998 and 2002, respectively. After grad-uation from Ph.D., he worked in‘‘Intelligent Pixel Incorporation’’ as aSenior Research Engineer for one year.He joined the School of Electrical andInformation Engineering, the Universityof Sydney in December 2002 where he is
a Senior Lecturer now. His research interests include wirelesssensor networks, wireless localization techniques, network QoS,
telecommunications traffic measurement, analysis and modeling,and network performance analysis.Barıs� Fidan received the B.S. degrees inelectrical engineering and mathematicsfrom Middle East Technical University,Turkey in 1996, the M.S. degree in elec-trical engineering from Bilkent Univer-sity, Turkey in 1998, and the Ph.D.degree in Electrical Engineering-Systemsat the University of Southern California,Los Angeles, USA in 2003. After work-ing as a postdoctoral research fellow atthe University of Southern California for
one year, he joined the Systems Engineering and Complex Sys-tems Program of National ICT Australia and the Research
School of Information Sciences and Engineering of the Austra-lian National University, Canberra, Australia in 2005, where he iscurrently a researcher. His research interests include autonomousformations, sensor networks, adaptive and nonlinear control,switching and hybrid systems, mechatronics, and various controlapplications including high performance and hypersonic flightcontrol, semiconductor manufacturing process control, and disk-drive servo systems.
Brian D.O. Anderson was born in Syd-ney, Australia, and received his under-graduate education at the University ofSydney, with majors in pure mathemat-ics and electrical engineering. He subse-quently obtained a Ph.D. degree inelectrical engineering from StanfordUniversity. Following completion of hiseducation, he worked in industry in Sil-icon Valley and served as a facultymember in the Department of Electrical
Engineering at Stanford. He was Professor of Electrical Engi-neering at the University of Newcastle, Australia from 1967 until
1981 and is now a Distinguished Professor at the AustralianNational University and Chief Scientist of National ICT Aus-tralia Ltd. His interests are in control and signal processing. He isa Fellow of the IEEE, Royal Society London, Australian Acad-emy of Science, Australian Academy of Technological Sciencesand Engineering, Honorary Fellow of the Institution of Engi-neers, Australia, and Foreign Associate of the US NationalAcademy of Engineering. He holds doctorates (honoris causa)from the Universite Catholique de Louvain, Belgium, SwissFederal Institute of Technology, Zurich, Universities of Sydney,Melbourne, New South Wales and Newcastle. He served a termas President of the International Federation of Automatic Con-trol from 1990 to 1993 and as President of the AustralianAcademy of Science between 1998 and 2002. His awards includethe IEEE Control Systems Award of 1997, the 2001 IEEE JamesH. Mulligan, Jr. Education Medal, and the Guillemin-CauerAward, IEEE Circuits and Systems Society in 1992 and 2001, theBode Prize of the IEEE Control System Society in 1992 and theSenior Prize of the IEEE Transactions on Acoustics, Speech andSignal Processing in 1986.