Embed Size (px)
Citation preview

UIUC CS 497: Section EALecture #3
Reasoning in Artificial Intelligence
Professor: Eyal Amir
Spring Semester 2004

Last Time
• SAT checking using DPLL (instantiate, propagate, backtrack)
• Entailment/SAT checking using Resolution (create more and more clauses until KB is saturated)
• Formal verification uses mainly SAT checking such as DPLL, but also sometimes resolution

From Homework You Should Know
• Deduction theorem for FOL
• Language of FOL
• Soundness, completeness, and incompleteness theorems
• Models of FOL

Today
• Reasoning procedure for FOL– Proving entailment using Resolution
• Application du jour: Temporal Reasoning
• Applications we will not touch– Spatial reasoning, formal verification,
mathematics, planning, NLP, …

First-Order Theories• Signature L:
– Function symbols (f(x,y))– Predicate (relation) symbols (P(x,A))– Constant symbols (A,B,C,…)
• FOL language: quantification over objects
))),()(()((
)),()()((
)),()()((
wmlovesmmanmwwomanw
wmlovesmmanwwomanmw
wmlovesmmanwwomanmw

Model Theory: Reminder
• Structure/Interpretation: <U,I>– U = Universe of elements– I = Mapping of
• Constant symbols to elements in U• Predicate symbols to relations over U• Function symbols to functions over U
• M T - M satisfies T– T is a theory, i.e., a set of FOL sentences in
language L for which M is an interpretation
╨

Logical Entailment
))),()(()((
)),()()((
)),()()((
wmlovesmmanmwwomanw
wmlovesmmanwwomanmw
wmlovesmmanwwomanmw
?
╨
╨
L={man, woman, loves} M1=<U1,I1>U1={Sue,Kim,Pat}I1[man]={Pat}I1[woman]={Sue,Kim}I1[loves]={<Pat,Kim>,<Pat,Sue>}
?
M1
╨
M1
╨

Clausal Form
• Every FOL formula is consistency-equivalent to conjunction of F.O. clauses.
• First-order clause– Only universal quantifiers (which are implicit)– Disjunction of literals (atoms or their negation)
))),()(()(( wmlovesmmanmwwomanw
))),(()(
))(()(
vvSKmlovesvwoman
wSKmmanwwoman

Conversion to Clausal Form
1. “” replaced by “”, ””2. Negations in front of atoms
3. Standardize variables (unique vars.)
4. Eliminate existentials (Skolemization)
5. Drop all universal quantifiers
6. Move disjunctions in (put into CNF)
7. Rename vars. (standardize vars. apart)
))),()(()(( wmlovesmmanmwwomanw ))),()(()(( wmlovesmmanmwwomanw ))),()(()(( wmlovesmmanmwwomanw
)))),(())((()(( wwSKmloveswSKmmanwwomanw ))),(())((()( wwSKmloveswSKmmanwwoman
)))),(()(()))(()((wwSKmloveswwoman
wSKmmanwwoman
)))),(()((
)))(()((vvSKmlovesvwoman
wSKmmanwwoman
))),()(()(( wmlovesmmanmwwomanw

Take a Breath
• Until now: – First-order logic basics– How to convert a general FOL sentence to
clausal form
• From now: Resolution theorem proving– Search in the space of proofs
• Later: Temporal reasoning

Resolution Theorem Proving
• Given:– KB – a set of first-order sentences– Query Q – a logical sentence
• Calling procedure:1. Add Q to KB
2. Convert KB into clausal form
3. Run theorem prover. If we prove contradiction, return T.

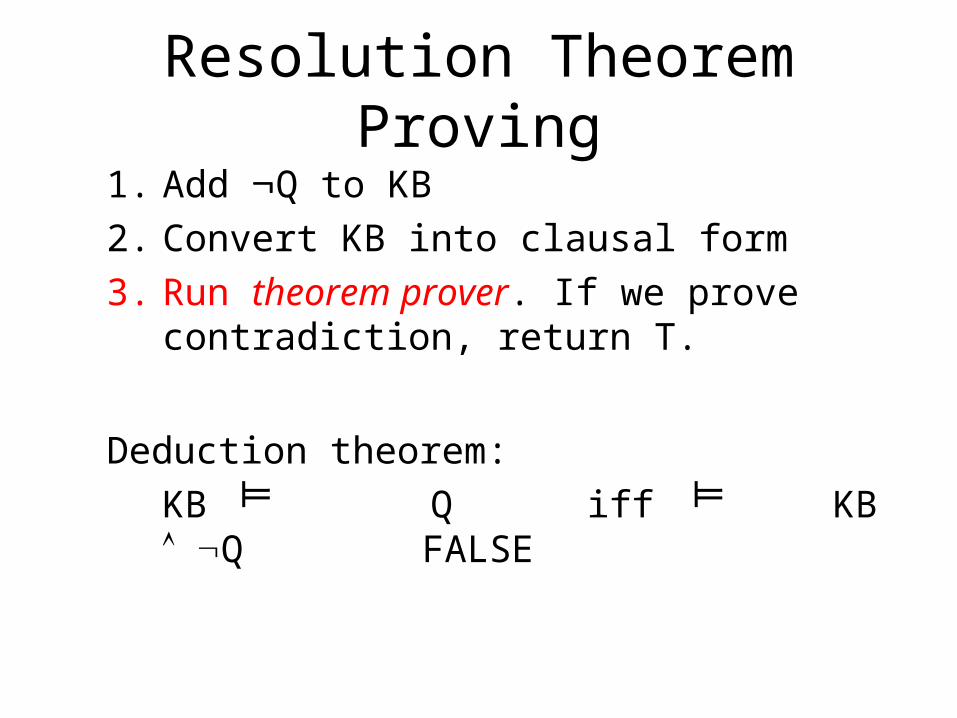
Resolution Theorem Proving
1. Add Q to KB
2. Convert KB into clausal form
3. Run theorem prover. If we prove contradiction, return T.
Deduction theorem:
KB Q iff KB Q FALSE
╨ ╨
Resolution Theorem Proving
1. Add Q to KB
2. Convert KB into clausal form
3. Run theorem prover. If we prove contradiction, return T.
Deduction theorem:
KB Q iff KB Q FALSE
╨ ╨

First-Order Resolution
• Resolution inference rule:
C1: P(t1,…,tk) C1’(t1,…,tk)
C2: P(s1,…,sk) C2’(s1,…,sk)
mgu(<t1,…,tk>,<s1,…,sk>) = {r1,…,rn}
--------------------------------------------
C3: (C1’ C2’) {r1,…,rn}

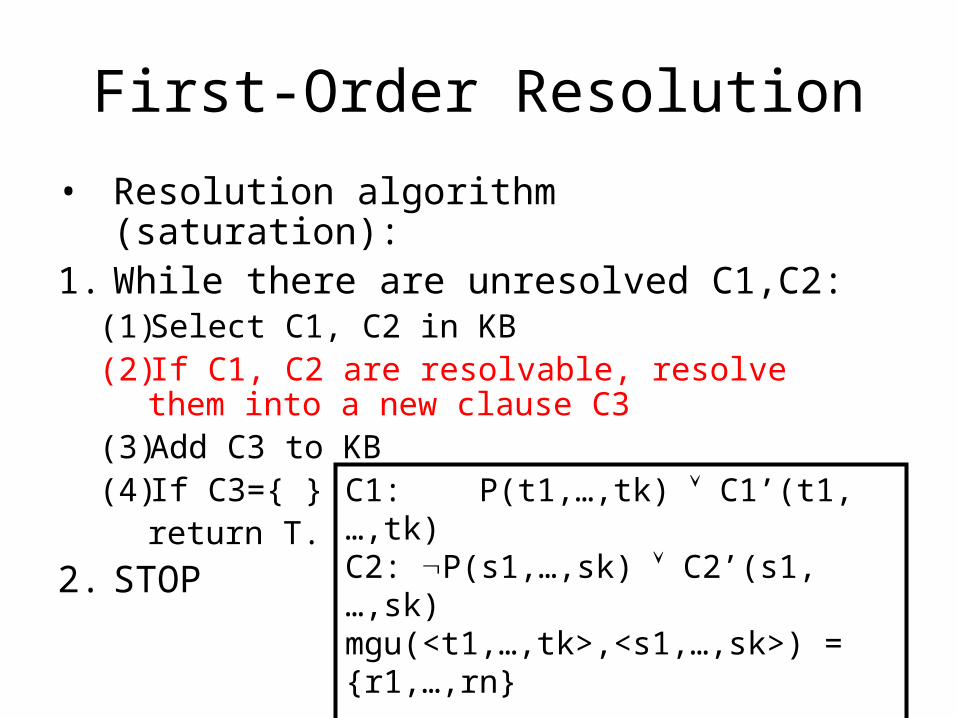
First-Order Resolution
• Resolution algorithm (saturation):1. While there are unresolved C1,C2:
(1) Select C1, C2 in KB(2) If C1, C2 are resolvable, resolve them
into a new clause C3(3) Add C3 to KB(4) If C3={ }
return T.
2. STOP
C1: P(t1,…,tk) C1’(t1,…,tk)C2: P(s1,…,sk) C2’(s1,…,sk)mgu(<t1,…,tk>,<s1,…,sk>) = {r1,…,rn}--------------------------------------------C3: (C1’ C2’) {r1,…,rn}

Resolution in Action
)()()(
)()()()()()()()()(
)()()()(
AaBfAc
BfCercwfCezaBfycAa
tfsaxcxa
On board
Negated Query
KB
C1: P(t1,…,tk) C1’(t1,…,tk)C2: P(s1,…,sk) C2’(s1,…,sk)mgu(<t1,…,tk>,<s1,…,sk>) = {r1,…,rn}--------------------------------------------C3: (C1’ C2’) {r1,…,rn}

Resolution in Action
)()()(
)()()()()()()()()(
)()()()(
AaBfAc
BfCercwfCezaBfycAa
sfsaxcxa
On board
Negated Query
KB
C1: P(t1,…,tk) C1’(t1,…,tk)C2: P(s1,…,sk) C2’(s1,…,sk)mgu(<t1,…,tk>,<s1,…,sk>) = {r1,…,rn}--------------------------------------------C3: (C1’ C2’) {r1,…,rn}
First-Order Resolution
• Resolution algorithm (saturation):1. While there are unresolved C1,C2:
(1) Select C1, C2 in KB(2) If C1, C2 are resolvable, resolve them
into a new clause C3(3) Add C3 to KB(4) If C3={ }
return T.
2. STOP
C1: P(t1,…,tk) C1’(t1,…,tk)C2: P(s1,…,sk) C2’(s1,…,sk)mgu(<t1,…,tk>,<s1,…,sk>) = {r1,…,rn}--------------------------------------------C3: (C1’ C2’) {r1,…,rn}

First-Order Resolution Rule
(2) If C1, C2 are resolvable, resolve them into a new clause C3
If C1,C2 have two literals l1,l2 with same predicates (P) and opposite polarity, and
If l1= P(t1,…,tk), l2= P(s1,…,sk), unifiable
with mgu (most general unifier) {r1,…,rn},
then… C1: P(t1,…,tk) C1’(t1,…,tk)C2: P(s1,…,sk) C2’(s1,…,sk)mgu(<t1,…,tk>,<s1,…,sk>) = {r1,…,rn}--------------------------------------------C3: (C1’ C2’) {r1,…,rn}
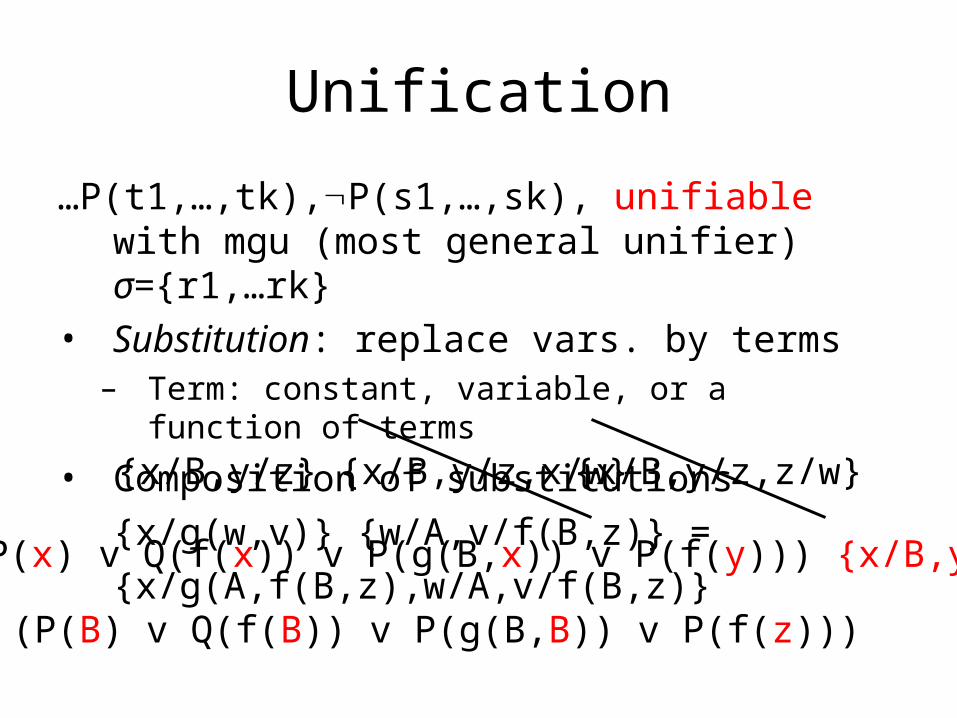
Unification
…P(t1,…,tk),P(s1,…,sk), unifiable with mgu (most general unifier) σ={r1,…rk}
• Substitution: replace vars. by terms– Term: constant, variable, or a function of
terms
• Composition of substitutions
{x/g(w,v)} {w/A,v/f(B,z)} =
{x/g(A,f(B,z),w/A,v/f(B,z)}(P(x) v Q(f(x)) v P(g(B,x)) v P(f(y))) {x/B,y/z}
(P(B) v Q(f(B)) v P(g(B,B)) v P(f(z)))
{x/B,y/z} {x/B,y/z,x/w} {x/B,y/z,z/w}

Unification
• Unification: find a substitution σ for• C1: P(t1,…,tk) C1’(t1,…,tk)• C2: P(s1,…,sk) C2’(s1,…,sk)
such that P(t1,…,tk)σ = P(s1,…,sk)σ
P(A,y,g(x,y)){y/f(A)} = P(z,f(z),g(x,f(w))){z/A,w/A}σ={y/f(A),z/A,w/A}
P(A,y,g(x,y)){y/f(w)} = P(z,f(w),g(x,f(w))){z/A}σ={y/f(w),z/A}
Most general unifier
Unification
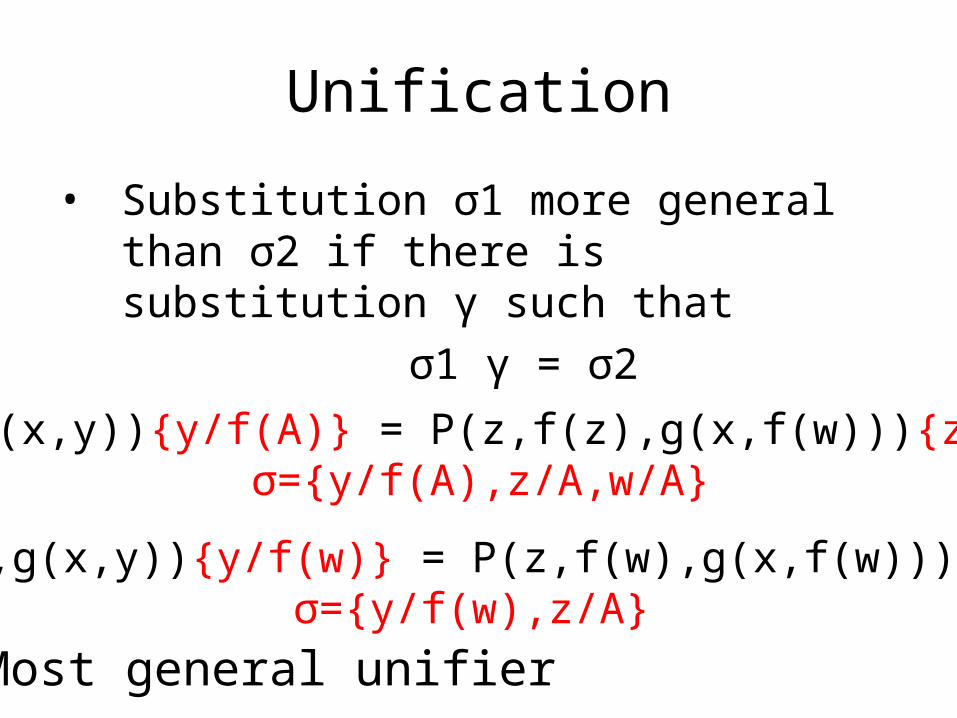
• Substitution σ1 more general than σ2 if there is substitution γ such that
σ1 γ = σ2
P(A,y,g(x,y)){y/f(A)} = P(z,f(z),g(x,f(w))){z/A,w/A}σ={y/f(A),z/A,w/A}
P(A,y,g(x,y)){y/f(w)} = P(z,f(w),g(x,f(w))){z/A}σ={y/f(w),z/A}
Most general unifier

Unification
• Substitution σ1 more general than σ2 if there is substitution γ such that
σ1 γ = σ2
σ2={y/f(A),z/A,w/A}
σ1={y/f(w),z/A}
Most general unifier
γ={w/A}

Finding the MGUProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,w))

Finding the MGUProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,w))

Finding the MGUProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,w))

Finding the MGUProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,w))

Finding the MGUProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,w))

part(3,x) = y part(3,y) = f(w)part(1,x) = P part(1,y) = Ppart(2,x) = A part(2,y) = z
Finding the MGUProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,w))part(4,x) = g(x,f(w)) part(4,y) = g(v,w)
FOccurs check

Finding the MGU: another exampleProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,f(w)))

Finding the MGU: another exampleProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,f(w)))

Finding the MGU: another exampleProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,f(w)))

Finding the MGU: another exampleProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,f(w)))

Finding the MGU: another exampleProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,f(w)))

part(3,x) = y part(3,y) = f(w)part(1,x) = P part(1,y) = Ppart(2,x) = A part(2,y) = z
Finding the MGU: another exampleProcedure MGU(x,y)
1. If x=y, return { }
2. If x or y are vars., return MGUvar(x,y)
3. If x or y are const.,or Len(x)=/=Len(y), return F.
4. σ ← { }; For i ← 1 to Len(x)1. s ← MGU(part(i,x),part(i,y)); if s=F, return F.
2. σ ← compose(σ,s); x ← subst(x,σ); y ← subst(y,σ);
5. Return σ
part(4,x) = g(x,f(w)) part(4,y) = g(v,f(w))σ={y/f(w),z/A,v/x}
x = P(A,y,g(x,y)) y = P(z,f(w),g(v,f(w)))

Correctness of FOL Resolution
• Soundness: Resolution is sound for first-order inference
• Refutation Completeness: Resolution will find the empty clause, if FALSE is entailed
• No guarantee of termination (saturation), if FALSE not entailed: FOL semi-decidable

Simple Efficiency Improvements
• Subsumption between clauses:– If clause C subsumes clause D (C entails D),
then we can remove D from the KB.
{P(A)} {P(A),P(B)}
{P(A)} {~P(A)}
{P(f(x),A),Q(g(x),B)} {P(f(v),y),Q(g(v),y)}
• Algorithm for checking subsumption?╨
╨╨
{P(A)} {P(t)}╨

Simple Efficiency Improvements
• Subsumption within the clause:– If literal a subsumes literal b (a entails b), then
we can remove a from the clause…– But, notice the variables’ scope
{P(A),P(t)}
{P(A),~P(B),P(t)}
{P(A,x),P(y,B)}
{P(x),Q(x),P(A)}
{P(A)}{P(A),~P(B)}
{P(A,x),P(y,B)}
{P(x),Q(x),P(A)}

Properties of Resolution
• Unifying two literals of length nO(n2) – because of occurs check
• Finding two resolvable clauses from m clauses of length n:
O(m2n2) – the simple bound
• Overall algorithm: – Semi-decidable– Unbounded length of proof as function of n,m

Related to FOL Resolution
• Clause selection and restriction strategies for resolution (lecture #5, paper #19)
• Consequence finding (paper #3)
• Constraint Satisfaction Problem (paper #5)
• Reasoning with equality (paper #6)
• DPLL in FOL (paper #7)
• Decidable fragments of FOL (paper #8)

Summary So Far
• Resolution theorem proving allows us to find contradictions and explanation.– The deduction theorem tells us how to ask
queries from Resolution
• Next: Temporal Reasoning

Situation Calculus
• A first-order language for describing the effects of actions and events over time– Constants: S0 – initial state; action constants– Functions: result(<action>,<situation>)– Predicates: “fluents” – properties that change
over time
at(1, S0)at(x,s) at(x+1,result(move_fwd,s))Query: at(1+1,s’) ans(s’) ?at(1+1,s’) ans(s’)

Situation Calculus
• Requires axioms describing effects and non-effects of actions/events
• Can be used for planning, projection, diagnosis, filtering (tracking)
• Frame Problem: the compact and natural-language-like specification of effects of actions
• Qualification Problem: the preconditions of actions

Notations
• Substitutions– φσ σ = {x1/t1,…,xk/tk}
– φσ σ = [x1/t1,…,xk/tk]
Next Time
• Description Logics
• Requires prior knowledge of:– FOL theorem proving– Tableau theorem proving – will be useful– Frame systems – will be useful