Embed Size (px)
Citation preview

The Pennsylvania State University
The Graduate School
LOW-WAVENUMBER TURBULENT BOUNDARY LAYER
WALL-PRESSURE MEASUREMENTS FROM VIBRATION DATA
OVER SMOOTH AND ROUGH SURFACES IN PIPE FLOW
A Thesis in
Acoustics
by
Neal D. Evans
c© 2011 Neal D. Evans
Submitted in Partial Fulfillment
of the Requirements
for the Degree of
Master of Science
August 2011
The thesis of Neal D. Evans was reviewed and approved∗ by the following:
Dean E. Capone
Associate Professor of Acoustics and Senior Research Associate
Thesis Advisor
William K. Bonness
Research Associate
Timothy A. Brungart
Associate Professor of Acoustics and Senior Research Associate
Victor W. Sparrow
Professor of Acoustics
Interim Chair, Graduate Program in Acoustics
∗Signatures are on file in the Graduate School.

Abstract
The vibration response of a thin cylindrical shell excited by fully-developed tur-bulent pipe flow is measured and used to extract the fluctuating pressure levelsgenerated by the boundary layer. Parameters used to extract the turbulent flowpressure levels are determined via experimental modal analyses of the water-filledpipe and measured vibration levels from flow through the pipe at 5.8 m/s. Mea-surements are reported for hydraulically smooth and fully rough surface conditions.Smooth wall-pressure levels are compared to the turbulent boundary layer pressuremodel of Chase (1987) and the measurements of Bonness, et al. (2010). Resultsfor the smooth pipe match the predicted smooth wall-pressure spectrum and cor-respond to a normalized low-wavenumber-white level of -41 dB. Pressure levelsfrom the fully rough condition display a low-wavenumber-white level of -28 dBfor a surface with uniformly distributed roughness elements, suggesting a 13 dBcorrection factor for a fully rough surface over a hydraulically smooth surface.
iii

Table of Contents
List of Figures vi
List of Tables viii
List of Symbols ix
Acknowledgments xi
Chapter 1Background 11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Goals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Literature review . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.1 Previous work . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.2 Turbulent boundary layer pressure models . . . . . . . . . . 151.2.3 Surface roughness . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2.3.1 Roughness and turbulence noise . . . . . . . . . . . 181.2.3.2 Response to a step change in roughness . . . . . . 23
Chapter 2Experimental methods and mathematical formulations 252.1 Pipe configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2 Modal analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.3 Quantification of surface roughness . . . . . . . . . . . . . . . . . . 332.4 Inverse method of determining turbulent boundary layer fluctuating
pressure levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.5 Data processing and noise reduction . . . . . . . . . . . . . . . . . . 37
iv

Chapter 3Results 423.1 Measurement results . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.1.1 Surface profiles: hydraulically smooth and fully rough . . . . 433.1.2 Flow: hydraulically smooth and fully rough . . . . . . . . . 473.1.3 Transitionally rough case . . . . . . . . . . . . . . . . . . . . 563.1.4 Modal analysis: hydraulically smooth and fully rough . . . . 57
3.2 Calculated low-wavenumber pressure levels . . . . . . . . . . . . . . 623.3 Transitionally rough case . . . . . . . . . . . . . . . . . . . . . . . . 63
3.3.1 Surface profile . . . . . . . . . . . . . . . . . . . . . . . . . . 633.3.2 Flow and modal results . . . . . . . . . . . . . . . . . . . . . 64
Chapter 4Conclusions 704.1 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704.2 Suggestions for future work . . . . . . . . . . . . . . . . . . . . . . 72
Bibliography 74
v

List of Figures
1.1 Turbulent boundary layer wavenumber-frequency spectrum . . . . . 31.2 Coordinate system for flow over a planar surface . . . . . . . . . . . 71.3 Turbulent boundary layer pressure frequency spectrum . . . . . . . 81.4 Ideal and real wavevector filtering action . . . . . . . . . . . . . . . 111.5 Low-wavenumber turbulent boundary layer wall-pressure measure-
ments from vibration data . . . . . . . . . . . . . . . . . . . . . . . 141.6 Turbulent boundary layer pressure models . . . . . . . . . . . . . . 191.7 Turbulent boundary layer velocity profile . . . . . . . . . . . . . . . 201.8 Surface roughness and velocity profile (Schlichting) . . . . . . . . . 211.9 Surface roughness and velocity profile (Schlichting) . . . . . . . . . 22
2.1 Pipe flow configuration . . . . . . . . . . . . . . . . . . . . . . . . . 262.2 Test section and wall detail . . . . . . . . . . . . . . . . . . . . . . 272.3 Test section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.4 Upstream reference accelerometers . . . . . . . . . . . . . . . . . . . 312.5 Downstream reference accelerometers . . . . . . . . . . . . . . . . . 312.6 Unwrapped cylinder measurement grid . . . . . . . . . . . . . . . . 322.7 (2,1) mode shape and sensitivity function . . . . . . . . . . . . . . . 372.8 Measured and processed hydrophone data . . . . . . . . . . . . . . 41
3.1 Surface roughness profiles . . . . . . . . . . . . . . . . . . . . . . . 453.2 Smooth aluminum plate surface profile . . . . . . . . . . . . . . . . 453.3 Nonskid tape surface profile . . . . . . . . . . . . . . . . . . . . . . 463.4 Smooth Aluminum plate surface profile . . . . . . . . . . . . . . . . 463.5 Smooth Aluminum plate spatial transform . . . . . . . . . . . . . . 473.6 Smooth pipe flow spectrogram . . . . . . . . . . . . . . . . . . . . . 493.7 Fully rough pipe flow spectrogram . . . . . . . . . . . . . . . . . . . 503.8 Smooth pipe flow modal decomposition: ring 1 . . . . . . . . . . . . 503.9 Smooth pipe flow modal decomposition: ring 2 . . . . . . . . . . . . 513.10 Smooth pipe flow modal decomposition: ring 3 . . . . . . . . . . . . 513.11 Fully rough pipe flow modal decomposition: ring 1 . . . . . . . . . . 52
vi

3.12 Fully rough pipe flow modal decomposition: ring 2 . . . . . . . . . . 523.13 Fully rough pipe flow modal decomposition: ring 3 . . . . . . . . . . 533.14 Smooth pipe point pressure spectrum and Chase model . . . . . . . 533.15 Smooth pipe point pressure spectrum and background noise . . . . 543.16 Fully rough pipe point pressure spectrum and background noise . . 543.17 Smooth and fully rough pipe point pressure spectra . . . . . . . . . 553.18 Smooth pipe ambient vibration during flow . . . . . . . . . . . . . . 553.19 Fully rough pipe ambient vibration during flow . . . . . . . . . . . . 563.20 Smooth pipe modal analysis . . . . . . . . . . . . . . . . . . . . . . 583.21 Fully rough pipe modal analysis . . . . . . . . . . . . . . . . . . . . 583.22 Smooth pipe parametric fit to modal data . . . . . . . . . . . . . . 603.23 Fully rough pipe parametric fit to modal data . . . . . . . . . . . . 603.24 (2,1) mode shape and sensitivity function . . . . . . . . . . . . . . . 613.25 (3,3) mode shape and sensitivity function . . . . . . . . . . . . . . . 613.26 Smooth and fully rough low-wavenumber pressure levels . . . . . . . 623.27 180-grit sandpaper 2D surface profile . . . . . . . . . . . . . . . . . 653.28 180-grit sandpaper 3D surface profile . . . . . . . . . . . . . . . . . 653.29 180-grit sandpaper spatial transform . . . . . . . . . . . . . . . . . 663.30 Transitionally rough pipe flow spectrogram . . . . . . . . . . . . . . 663.31 Transitionally rough pipe flow modal decomposition: ring 1 . . . . . 673.32 Transitionally rough pipe flow modal decomposition: ring 2 . . . . . 673.33 Transitionally rough pipe flow modal decomposition: ring 3 . . . . . 683.34 Transitionally rough pipe point pressure spectrum and background
noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683.35 Transitionally rough pipe modal analysis . . . . . . . . . . . . . . . 69
vii
List of Tables
2.1 Test section parameters . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.1 Flow speed average, extrema, and variation . . . . . . . . . . . . . . 433.2 Modal parameters: smooth pipe . . . . . . . . . . . . . . . . . . . . 593.3 Modal parameters: fully rough pipe . . . . . . . . . . . . . . . . . . 593.4 Smooth pipe low-wavenumber normalized pressure levels . . . . . . 633.5 Fully rough pipe low-wavenumber normalized pressure levels . . . . 63
viii
List of Symbols
δ Boundary layer thickness
δ∗ Boundary layer displacement thickness
η Damping loss factor
ν Kinemtic viscosity
ρ Density
τw Wall shear stress
Φ Point pressure spectrum
Ψ Spatial mode shape function
ω Angular frequency
a Pipe radius
c Sound speed
D Pipe diameter
E Young’s modulus
F Modal force
f Friction factor
G Single-sided power spectral density
ix
H Transfer function
k0 Acoustic wavenumber
k1 Streamwise wavenumber
k3 Cross-stream wavenumber
kc Convective wavenumber
ks Roughness height
L Length
m Modal mass
P Pressure
Re Reynolds number
S Sensitivity function
T Record length
t Thickness
u Displacement
Uc Convection velocity
U∞ Free-stream velocity
Vbulk Bulk (average) velocity
v∗ Friction velocity
X Complex linear spectrum
x1 Streamwise direction
x3 Cross-stream direction
x(t) Time series
Y Complex linear spectrum
x

Acknowledgments
First, I am grateful to the Applied Research Laboratory and the Walker GraduateAssistantship for supporting the two years of my graduate study. I would like toacknowledge the ARL and Garfield Thomas Water Tunnel management of Dr. EdLiska, Dr. Dick Stern, and Rear Admiral Chuck Brickell, USN (ret.) for theirencouragement of basic research programs at the university labs.
I would like to thank my advisor and the chair of my thesis committee, Dr.Dean Capone, for providing his expertise and direction. Dean’s level-headed anddown to earth advising style have helped me grow as a student and as a researcher,and contributing to his line of work has been a fantastic educational and profes-sional experience for me. I would also like to thank Dr. William Bonness forhis insight and help with everything from experimental setup to data processing.Bill’s intimate knowledge of the experiment and its challenges was invaluable. Dr.Tim Brungart suggested several important corrections and clarifications to thisdocument which improved its clarity and completeness. Dean, Tim, and Bill wereessential in providing corrections and suggestions for improvement throughout theresearch and writing process.
Much credit is due to the enthusiastic professors who have educated me dur-ing my tenure at Penn State, including the chair of the Graduate Program inAcoustics, Dr. Victor Sparrow, who provided guidance and was an integral partof my education. I would also like to acknowledge Drs. Anthony Atchley, KennethBrentner, Thomas Gabrielson, Steven Garrett, Stephen Hambric, Philip Morris,and Karl Reichard.
Finally, I would like to recognize the Garfield Thomas Water Tunnel engineers,students, and staff for their continued assistance and insightful conversations, andAlexandria Salton, who was always nearby for consultation and logisitical help.
xi
Chapter 1Background
1.1 Introduction
1.1.1 Motivation
Turbulent boundary layer noise has been studied for approximately 50 years and
encompasses science and engineering elements from the fields of physical acous-
tics and fluid and structural mechanics. Interest lies primarily in mechanical and
aerospace engineering applications such as air- and water-borne vehicles and fluid
machinery systems. Importance lies in predicting the fluctuating pressures pro-
duced in the turbulent boundary layer and how these pressures can radiate noise
directly or couple to surrounding structures. Interest is generally present in the
noise generation of exterior flow over objects and in interior pipe flow. One of the
motivating factors in initiating the study of boundary layer noise was the develop-
ment of SONAR transducers on moving ships (Skudrzyk and Haddle (1958) [1])
where increased noise levels due to turbulent flow can impair transducer function.
2
Modern engineering concerns include noise and vibration of rotomachinery such as
wind turbines, fluid machinery systems such as pipelines, and passenger vehicles
such as aircraft interior cabin noise.
The state of the art thus far has failed to produce a fully deterministic theory
of turbulence, and it is not yet possible to analytically predict the pressure fluc-
tuations in turbulent flow. Scientists and engineers in the field must often rely
on empirical evidence from flow measurements to perform analyses. Experiments
performed for both internal and external flow configurations in air and water have
led to a number of models, for example, those proposed by Corcos (1963) [2], Chase
(1987) [3], and Smol’yakov (2000) [4], which can be used to predict unsteady pres-
sure levels. There is some disagreement between these models, and modifications
continue to be made as new experimental results become available.
Uncertainty persists in the low-wavenumber region and acoustic domain of
boundary layer pressure fluctuations, where levels are much lower than peak con-
vective levels and are thus very difficult to measure. These low-wavenumber pres-
sures are defined relative to the acoustic wavenumber and translate at speeds near
the ambient sound speed of the medium, where the acoustic wavenumber k0 = ω/c,
ω is the angular frequency, and c is the sound speed. Fluctuations translated at
the convection velocity Uc are referred to as convective pressures and contain most
of the energy in the turbulent boundary layer pressure spectrum. Ko (1993) [5]
defines the frequency dependent convection velocity based on measurements by
Bull (1967) [6] as shown in equation 1.1,
Uc = U∞(0.6 + 0.4e−0.8ωδ∗/U∞) (1.1)
3
where δ∗ is the boundary layer displacement thickness and U∞ is the free-stream
velocity.
Wavenumbers defined by speeds on the order of the mean flow speed are known
as hydrodynamic wavenumbers where the convective wavenumber kc = ω/Uc. De-
spite being low in level and inefficient direct radiators of sound, low-wavenumber,
long wavelength turbulent fluctuations are important because they may couple
to surrounding structures and produce additional noise or vibration. This low-
wavenumber coupling effect is exploited as a method of measuring those very pres-
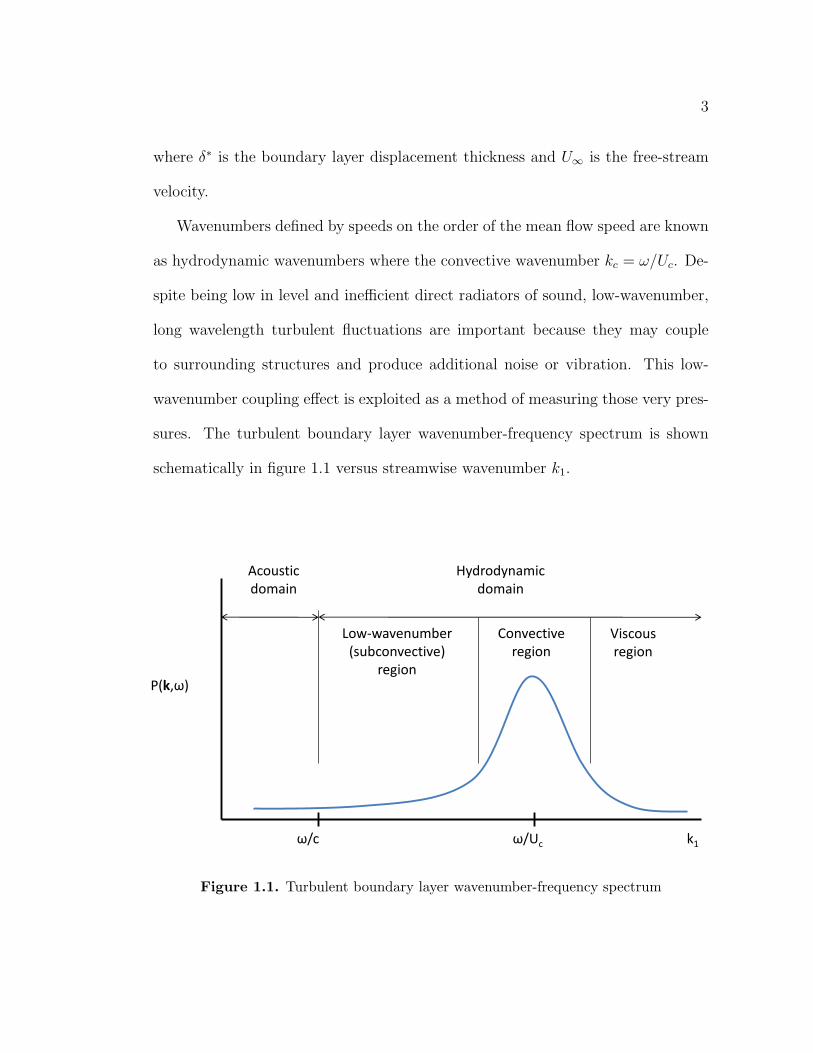
sures. The turbulent boundary layer wavenumber-frequency spectrum is shown
schematically in figure 1.1 versus streamwise wavenumber k1.
k1ω/Ucω/c
P(k,ω)
Acousticdomain
Low-wavenumber(subconvective)
region
Convectiveregion
Hydrodynamicdomain
Viscousregion
Figure 1.1. Turbulent boundary layer wavenumber-frequency spectrum
4
Also of interest and continuing study are the effects of surface roughness on
boundary layer noise. Roughness in flow may be a uniformly distributed field of
small elements (e.g., sandpaper) or more widely spaced discrete bumps or ridges
(e.g., bosses or barnacles; pipe flange discontinuities). While larger discrete ele-
ments such as abrupt geometry changes may affect the acoustics of a hydrody-
namic system, the effects are likely to be characterized by a change in the mean
flow conditions and will vary based on local conditions, requiring an independent
analysis of each configuration. A uniform field of roughness elements will alter the
wavenumber-frequency spectrum of the turbulent boundary layer itself in a manner
that is general and reproducible. The present study is concerned with smooth and
uniformly rough surfaces with roughness scales of interest on the order of one to
ten times the viscous sublayer thickness in order to produce hydraulically smooth
and fully rough surfaces.
Very little modeling of roughness-generated noise has been done, and more
experimental measurements will be needed to produce a widely accepted model for
a range of realistic roughness scales and distributions. A rigorous quantification
of surface roughness that will allow experimental reproducibility may be necessary
in the development of a valid roughness-generated noise model.
It should be noted before proceeding that the present study is concerned with
fully developed turbulent pipe flow, which is not strictly speaking the same as
turbulent boundary layer flow. A turbulent boundary layer over a flat plate will
grow unbounded as flow propagates downstream; the boundary layer in turbulent
pipe flow will eventually converge to the center of the pipe after some inlet length,
after which the velocity profile remains constant. The utility of performing pipe
5
flow measurements is in the extension of fundamental knowledge of turbulent flow,
which can be applied to other interior and exterior flow configurations.
1.1.2 Goals
The present study has two specific goals: to corroborate measurements made by
Bonness, et al. (2010) [7] of the low-wavenumber fluctuating pressure levels in
a turbulent flow over a smooth surface, and to provide low-wavenumber pressure
data for flow over transitionally rough and fully rough surfaces. Bonness utilized
a thin, simply supported cylindrical shell as part of a piping system to measure
the response to fully developed turbulent pipe flow in water driven by static head.
A similar setup is employed in the present study, with the application of two
types of uniform surface roughness in addition to measurements on the smooth
pipe. The radial vibration of the pipe is measured via rings of accelerometers
and a circumferential modal decomposition is performed on the measured data to
extract the modal response of the structure. The physical parameters of the system
are measured using a standard roving force-hammer modal analysis on the fluid
filled pipe without flow. The fluid-structure coupling action of low-wavenumber,
long wavelength pressures allows those pressures to be measured inversely in this
manner.
These data sets will potentially allow for the updating of current models of the
turbulence pressure spectrum and may aid in the development of future models
which may include surface roughness parameters. Models that accurately predict
low-wavenumber pressure fluctuations allow designers and engineers to estimate a
6
priori what noise levels a fluid machinery system will produce or what acoustic
signature a vehicle may have. This knowledge will enable designers to understand
how hydrodynamic and acoustic pressures may couple to structural resonances,
which at low Mach number is a low-wavenumber phenomenon.
1.2 Literature review
1.2.1 Previous work
The introduction of a planar surface into viscous flow of sufficiently high Reynolds
number facilitates the development of a turbulent boundary layer. The Reynolds
number for flow in a pipe is given by equation 1.2,
Re =vD
ν(1.2)
where v is the flow velocity, D is the pipe diameter, and ν is the kinematic viscosity
of the fluid. The critical Reynolds number where pipe flow becomes turbulent is
approximately 2300 (Fox, et al. [8]). Schlichting [9] notes however, that experi-
ments have produced laminar flow up to Reynolds numbers of 40,000 by creating
an extremely smooth inlet, and states that “the upper limit to which the critical
Reynolds number can be driven if extreme care is taken to free the inlet from dis-
turbances is not known at present.” The lower bound for Reynolds number where
flow will remain laminar no matter how large the disturbances is about 2000. Fully
developed turbulent pipe flow occurs after some distance from the inlet, when the
boundary layer has converged to the pipe center line and the velocity profile re-
7
mains constant. Schlichting [9] reports a requirement that ranges from 25 - 100
pipe diameters from the inlet to achieve fully developed turbulent pipe flow, based
on measurements by Kirsten (1927) [10] and Nikuradse (1932) [11].
Turbulent pressure fluctuations in the boundary layer are generated by eddies
of many wavelengths λ and frequencies ω, which impart fluctuating energy to the
boundary. The wavevector k may be divided into streamwise and cross-stream
components k1 and k3, respectively, where the coordinate system for flow over a
flat surface is shown in figure 1.2. These fluctuations may radiate noise directly or
couple to vibrational modes of the surface; such structural vibration can radiate
additional noise or cause material fatigue and failure.
Flow direction x1
x3
x2
Figure 1.2. Coordinate system for flow over a planar surface
Pressure fluctuations occur in a turbulent boundary layer over a wide range of
scales, the largest being on the order of the boundary layer thickness δ, down to the
dissipative Kolmogorov scale where viscous effects convert small scale fluctuations
8
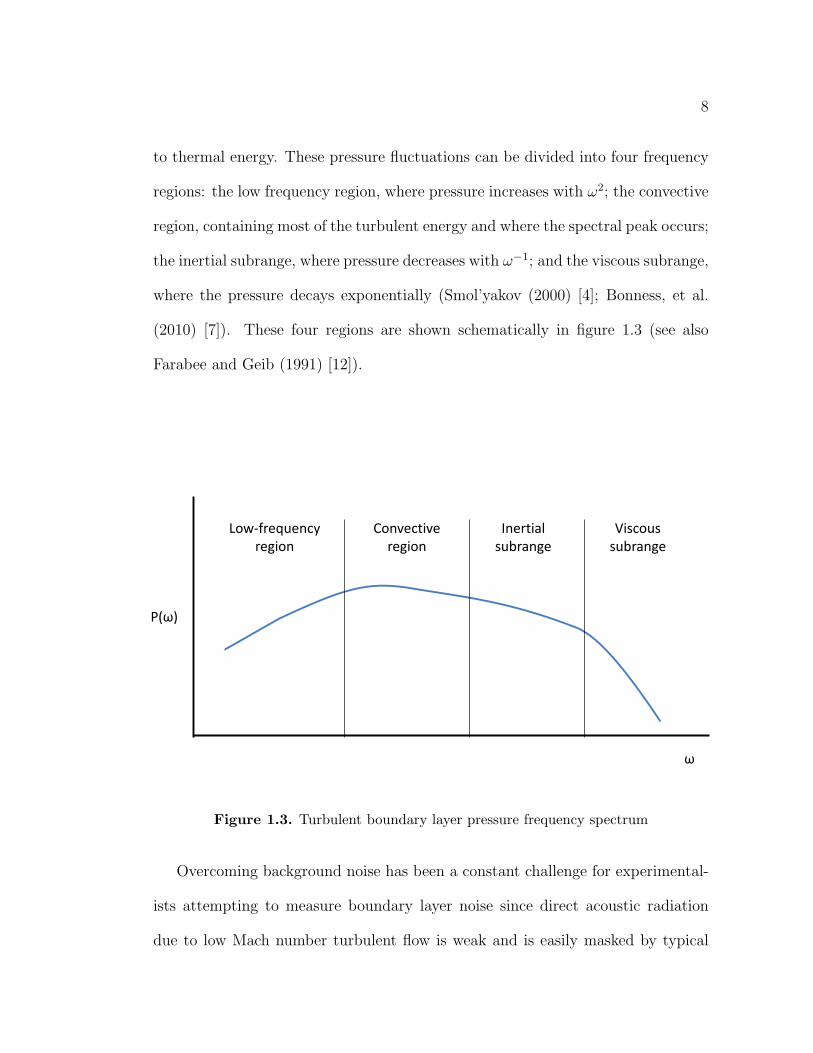
to thermal energy. These pressure fluctuations can be divided into four frequency
regions: the low frequency region, where pressure increases with ω2; the convective
region, containing most of the turbulent energy and where the spectral peak occurs;
the inertial subrange, where pressure decreases with ω−1; and the viscous subrange,
where the pressure decays exponentially (Smol’yakov (2000) [4]; Bonness, et al.
(2010) [7]). These four regions are shown schematically in figure 1.3 (see also
Farabee and Geib (1991) [12]).
ω
P(ω)
Low-frequencyregion
Convectiveregion
Viscoussubrange
Inertialsubrange
Figure 1.3. Turbulent boundary layer pressure frequency spectrum
Overcoming background noise has been a constant challenge for experimental-
ists attempting to measure boundary layer noise since direct acoustic radiation
due to low Mach number turbulent flow is weak and is easily masked by typical
9
background noise levels. This problem is evident in both wind and water tunnel
measurements, where facilities may not have been designed for optimal acoustic
performance and where fans and impellers used to circulate the working fluid may
generate substantial noise. Blake (1970) [13] reports that, although using a low-
noise wind tunnel,
The low frequencies were dominated by an unidentified tunnel distur-
bance which was of considerable influence to about 70Hz, also below
70Hz the microphone response began to decrease so that all spectral
data below 70Hz were discarded.
Blake was among the first experimentalists to utilize pinhole transducers to ex-
tend the high frequency measurement range, and was able to report that the space-
time decay rate of small-scale eddies was higher than previously reported. Will-
marth and Woolridge (1962) [14] performed pressure measurements over smooth
and rough surfaces, noting that
...the pressure-fluctuation measurements on the rough steel disk demon-
strate that surface roughness on even a small portion of the wall can
have a profound effect on the fluctuating wall-pressure in the immediate
vicinity.
Like Blake, Willmarth and Woolridge had to discard low frequency data, noting
that the hourly change in sun shining on the wind tunnel test section could alter
fluctuating pressure amplitudes by a factor of 10. This effect is “attributed to
density stratification of the air near the wind-tunnel wall.”
10
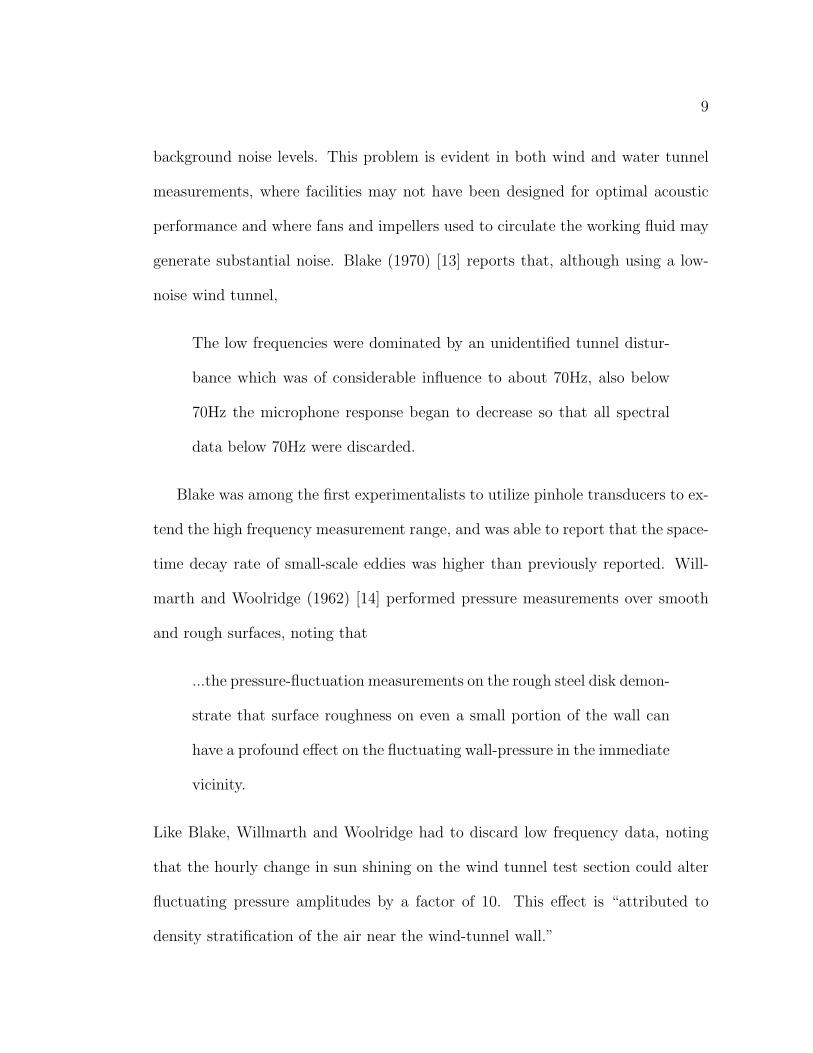
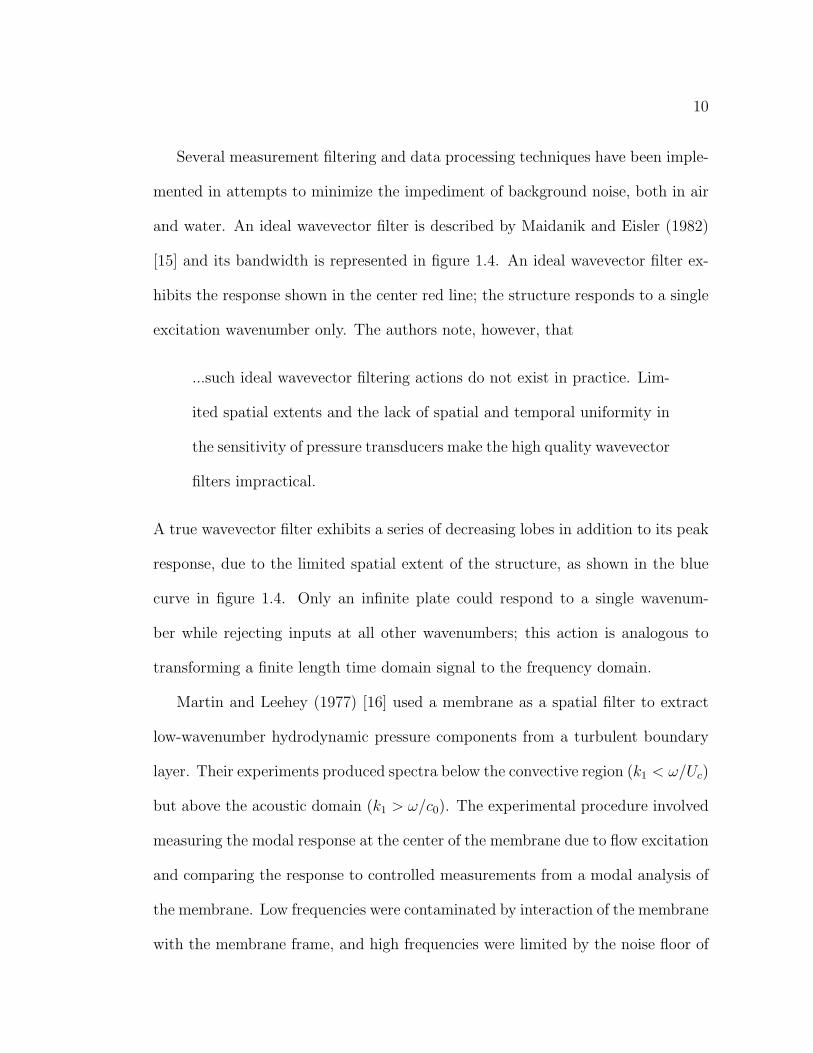
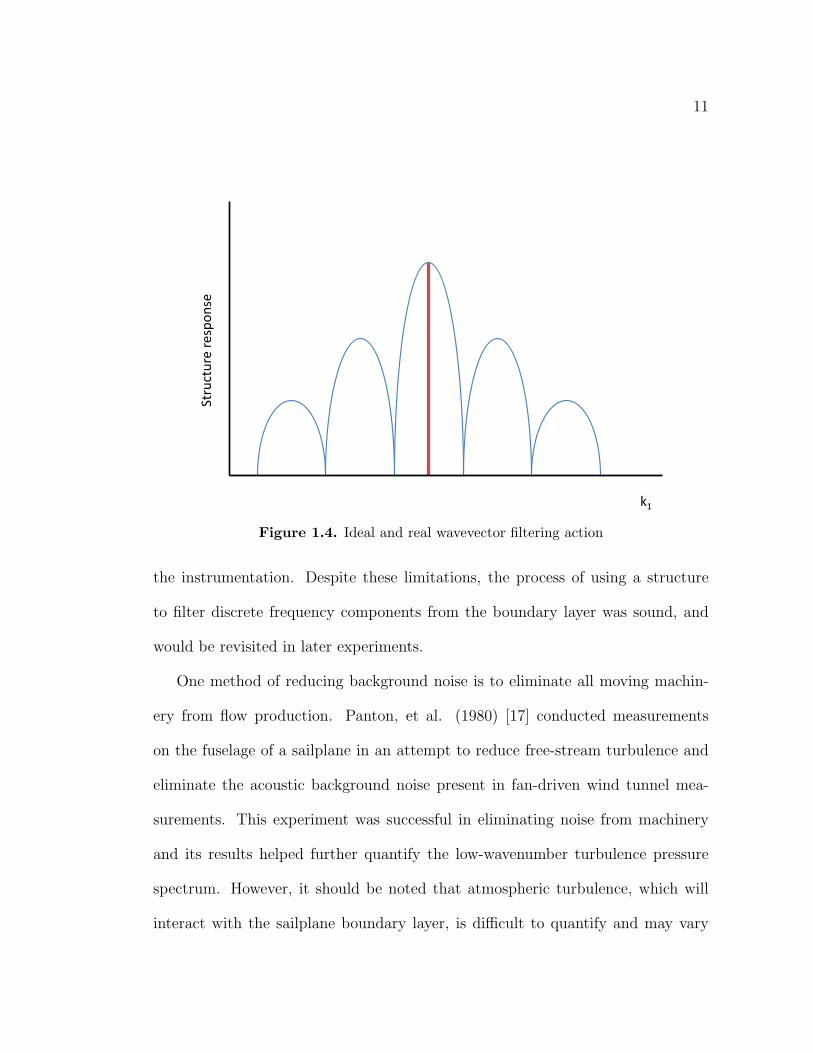
Several measurement filtering and data processing techniques have been imple-
mented in attempts to minimize the impediment of background noise, both in air
and water. An ideal wavevector filter is described by Maidanik and Eisler (1982)
[15] and its bandwidth is represented in figure 1.4. An ideal wavevector filter ex-
hibits the response shown in the center red line; the structure responds to a single
excitation wavenumber only. The authors note, however, that
...such ideal wavevector filtering actions do not exist in practice. Lim-
ited spatial extents and the lack of spatial and temporal uniformity in
the sensitivity of pressure transducers make the high quality wavevector
filters impractical.
A true wavevector filter exhibits a series of decreasing lobes in addition to its peak
response, due to the limited spatial extent of the structure, as shown in the blue
curve in figure 1.4. Only an infinite plate could respond to a single wavenum-
ber while rejecting inputs at all other wavenumbers; this action is analogous to
transforming a finite length time domain signal to the frequency domain.
Martin and Leehey (1977) [16] used a membrane as a spatial filter to extract
low-wavenumber hydrodynamic pressure components from a turbulent boundary
layer. Their experiments produced spectra below the convective region (k1 < ω/Uc)
but above the acoustic domain (k1 > ω/c0). The experimental procedure involved
measuring the modal response at the center of the membrane due to flow excitation
and comparing the response to controlled measurements from a modal analysis of
the membrane. Low frequencies were contaminated by interaction of the membrane
with the membrane frame, and high frequencies were limited by the noise floor of
11
k1
Stru
ctu
re r
esp
on
se
Figure 1.4. Ideal and real wavevector filtering action
the instrumentation. Despite these limitations, the process of using a structure
to filter discrete frequency components from the boundary layer was sound, and
would be revisited in later experiments.
One method of reducing background noise is to eliminate all moving machin-
ery from flow production. Panton, et al. (1980) [17] conducted measurements
on the fuselage of a sailplane in an attempt to reduce free-stream turbulence and
eliminate the acoustic background noise present in fan-driven wind tunnel mea-
surements. This experiment was successful in eliminating noise from machinery
and its results helped further quantify the low-wavenumber turbulence pressure
spectrum. However, it should be noted that atmospheric turbulence, which will
interact with the sailplane boundary layer, is difficult to quantify and may vary
12
widely based on local conditions; thus the reproducibility of this measurement
method is limited.
Farabee and Geib (1991) [12] reported low-wavenumber measurements over
smooth and rough walls in a wind tunnel experiment utilizing a linear wavevector
filter consisting of six large flush-mounted microphones. Measurements were made
for flow velocities from 9.1 - 48.8 m/s for smooth, transitionally rough, and fully
rough surfaces (see section 2.3 and equations 1.14 - 1.16). Farabee and Geib report
increased subconvective and acoustic pressure levels for rough wall conditions, but
remark that acoustic pressures may have been contaminated by facility noise. They
report that
...the acoustic pressures that are measured in the tunnel for a clean
tunnel condition are due to background facility noise and not acoustic
pressures generated by local boundary layer flow. The best that could
be expected from the smooth wall sonic level measurements is to set
the upper bounds on the magnitude of the boundary layer generated
acoustic levels.
Despite some 30 years of study and the implementation of the methods de-
scribed above, accurate measurements of the low-wavenumber pressure levels in a
turbulent boundary layer have remained elusive.
In a recent study by Bonness, et al. (2010) [7], static head from a large reser-
voir was used to drive water through a thin cylindrical shell, eliminating the need
for noisy pumps that generally contaminate acoustic measurements in pipe flow.
The resulting vibration of the shell due to the fluctuating turbulent pressures was
13
measured and used to inversely determine the pressure levels. Similar to Martin’s
and Leehey’s membrane, the modes of the cylinder provide a response to the fluc-
tuating boundary layer pressures at discrete frequencies. Comparing the resulting
vibration to a modal analysis of the cylinder provided physical parameters that
allowed the investigators to predict what fluctuating pressures would produce the
observed vibration. An additional noise cancellation technique was implemented
to reduce the effects of background noise: signals from reference transducers on
nearby structures were not intended to be excited by flow, so any correlated sig-
nals between these and the measurement transducers could be removed. The test
section and procedure developed by Bonness have been adapted for use in this
study.
Results from Bonness’s work provided pressure measurements at lower
wavenumbers than were previously available, and are summarized in figure 1.5,
along with the data reported by Farabee and Geib (1975) [18] and Martin and
Leehey, and the pressure models of Corcos, Chase, and Smol’yakov. Bonness’s
data suggest a normalized low-wavenumber-white, or flat, spectral level of -41 dB.
An important consideration when measuring fluctuating pressures is the lim-
itation that transducer size imposes on the measurement range. Area averaging
of small scale, high frequency turbulence structures will occur over the face of a
transducer and reduce the observed levels. This attenuation was a limiting factor
in many early experiments which used large diameter microphones, which gener-
ally have higher sensitivies than small microphones. The subject of area averaging
is covered in detail by Corcos (1963) [2], and Ko (1993) [5] provides corrections
in the form of spatial pressure sensitivity functions that may be applied to vari-
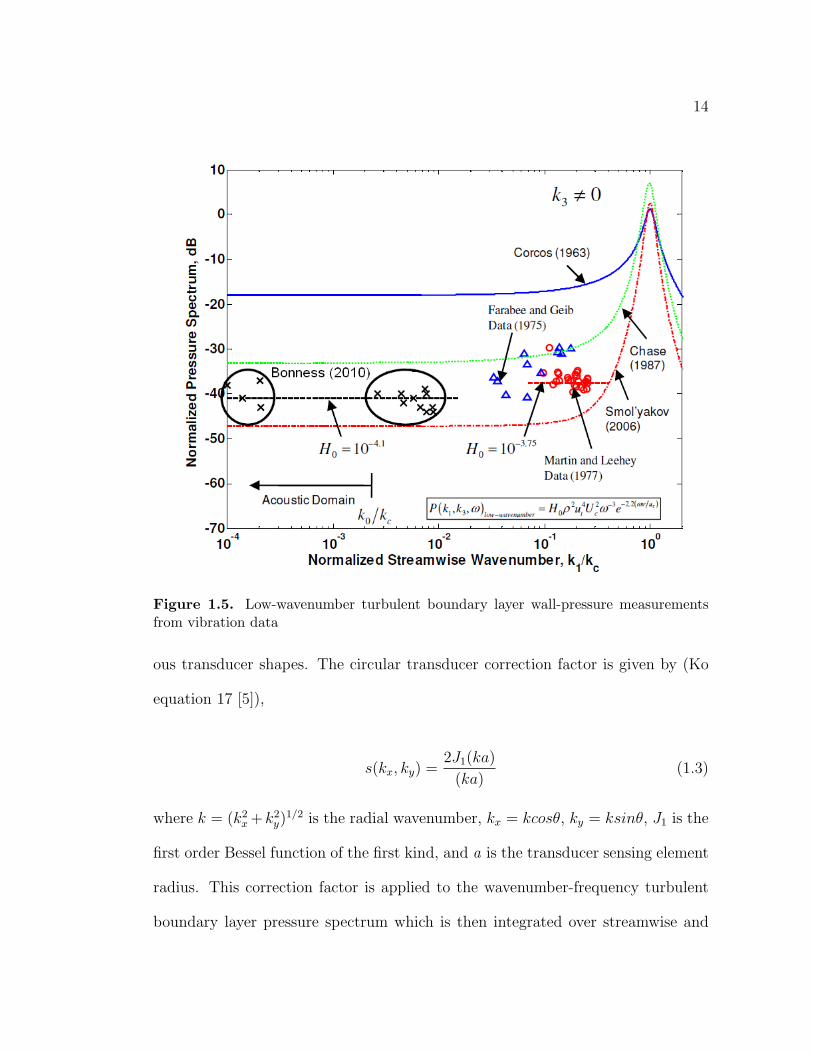
14
Figure 1.5. Low-wavenumber turbulent boundary layer wall-pressure measurementsfrom vibration data
ous transducer shapes. The circular transducer correction factor is given by (Ko
equation 17 [5]),
s(kx, ky) =2J1(ka)
(ka)(1.3)
where k = (k2x +k2
y)1/2 is the radial wavenumber, kx = kcosθ, ky = ksinθ, J1 is the
first order Bessel function of the first kind, and a is the transducer sensing element
radius. This correction factor is applied to the wavenumber-frequency turbulent
boundary layer pressure spectrum which is then integrated over streamwise and
15
cross-stream wavenumbers (k1 and k3) to produce the attenuated point pressure
spectrum which may then be compared with measured spectra. This integration
is given by equation 1.4 (Ko equation 1 [5]),
P (ω) = 2π
∫ ∫S(kx, ky)P (kx, ky, ω)dkxdky (1.4)
where S(kx, ky) = [s(kx, ky)]2 and P is the wavenumber-frequency pressure spec-
trum.
1.2.2 Turbulent boundary layer pressure models
One of the most popular models of the fluctuating pressure in a turbulent bound-
ary layer over a smooth plane surface was proposed by Chase (1980) [19] and was
extended to lower wavenumbers by Chase in 1987 [3] by including compressibility
(acoustic) effects. This model of the pressure spectrum is limited to subconvective
wavenumbers and is not valid at high frequencies, where viscosity becomes impor-
tant. The Chase model consists of two components, one represented by CT which
reflects interactions between turbulent eddies (known as turbulence-turbulence in-
teractions), and one represented by CM which reflects turbulence-mean shear in-
teractions. Howe (1979) [20] proposed a correction to the model, suggesting a low
frequency dependence of ω2 based on an analysis of the fluctuating surface shear
stress, which is dipole in nature. Lysak (2006) [21] added an exponential decay
factor to this modified model to reflect the high frequency, small scale sources in
the viscous subrange. The 1987 Chase model of the wall-pressure wavenumber-
frequency spectrum is given by equation 1.5 (Chase equation 40),

16
P (k, ω) =ρ2v3∗
[k2+ + (bδ)−2]5/2
{[c2
(|kc|k
)2
+ c3
(k
|kc|
)2
+ 1− c2 − c3
](1.5)
CTk2
[k2
+ + (bδ)−2
k2 + (bδ)−2
]+ CM
(k
|kc|
)2
k21
}
where ρ is the fluid density; v∗ is the friction velocity; δ is the boundary layer
thickness; h = 3.0, CTh = 0.014, CMh = 0.466, b = 0.75, and c2 = c3 = 1/6 are
empirical constants based on experimental data; and wavenumbers k =√k2
1 + k23,
k+ = (ω − uk1)2/(hv∗)2 + k2, and
|Kc|2 =
k2 − ω2/c2, k > ω/c
ω2/c2 − k2, k < ω/c
.
The 1987 Chase model, extrapolated to the acoustic domain by Howe (1991) [22]
is given by equation 1.6 (Howe equation 11),
P (k, ω) =ρ2v3∗δ
3
[(k+δ)2 + 1/b2]5/2
[CM(k1δ)
2k2
|k2 − k20|+ ε2k2
0
+ CT (kδ)2 (k+δ)2 + 1/b2
(kδ)2 + 1/b2(1.6)(
c1 +c2|k2 − k2
0|k2
+c3k
2
|k2 − k20|+ ε2k2
0
)]
where c1 = 2/3.
Integration of the wavenumber frequency spectrum over streamwise and cross-
stream wavenumbers produces a function of frequency only, known as the point
pressure frequency spectrum, given by equation 1.7. The point pressure spectrum
is what would be measured by a point pressure transducer; that is, it neglects
any high frequency attenuation that would be introduced by area averaging over a

17
transducer of finite area. The Chase point pressure spectrum is given by equation
1.8 and the Howe modification is given by equation 1.9. The modified Chase-Howe
model with the Lysak correction factor [21] is given by equation 1.10,
Φ(ω) =
∫P (k, ω)dk1dk3 (1.7)
Φ(ω)
ρ2U3∞δ
=
(v∗U∞
)4(( ωδU∞
)2 + α2c
)(( ωδU∞
)2
+ 1)1.5 , αc = 0.2 (1.8)
Φ(ω)
ρ2U3∞δ∗ =
(v∗U∞
)4(ωδ∗
U∞
)2((ωδ
∗
U∞)2 + α2
p
)1.5 , αp = 0.12 (1.9)
Φ(ω)
ρ2U3∞δ∗ =
(v∗U∞
)4(ωδ∗
U∞
)2((ωδ
∗
U∞)2 + α2
p
)1.5 e−2.2(ων/v∗) (1.10)
where ν is the kinematic viscosity of the fluid.
In 2000, Smol’yakov [4] proposed a piecewise model of the pressure spectrum
with separate scaling parameters for each of the three characteristic frequency
dependent ranges, given by equations 1.11 - 1.13 (Smol’yakov equation 18),
Φ(ω)
ρ2v2∗ν
= 1.49× 10−5R2.74θ ω2(1− 0.117R0.44
θ ω1/2), ω < ω0 (1.11)
Φ(ω)
ρ2v2∗ν
= 2.75ω−1.11(1− 0.82e−0.51(ω/ω0−1)), ω0 < ω < 0.2 (1.12)
18
Φ(ω)
ρ2v2∗ν
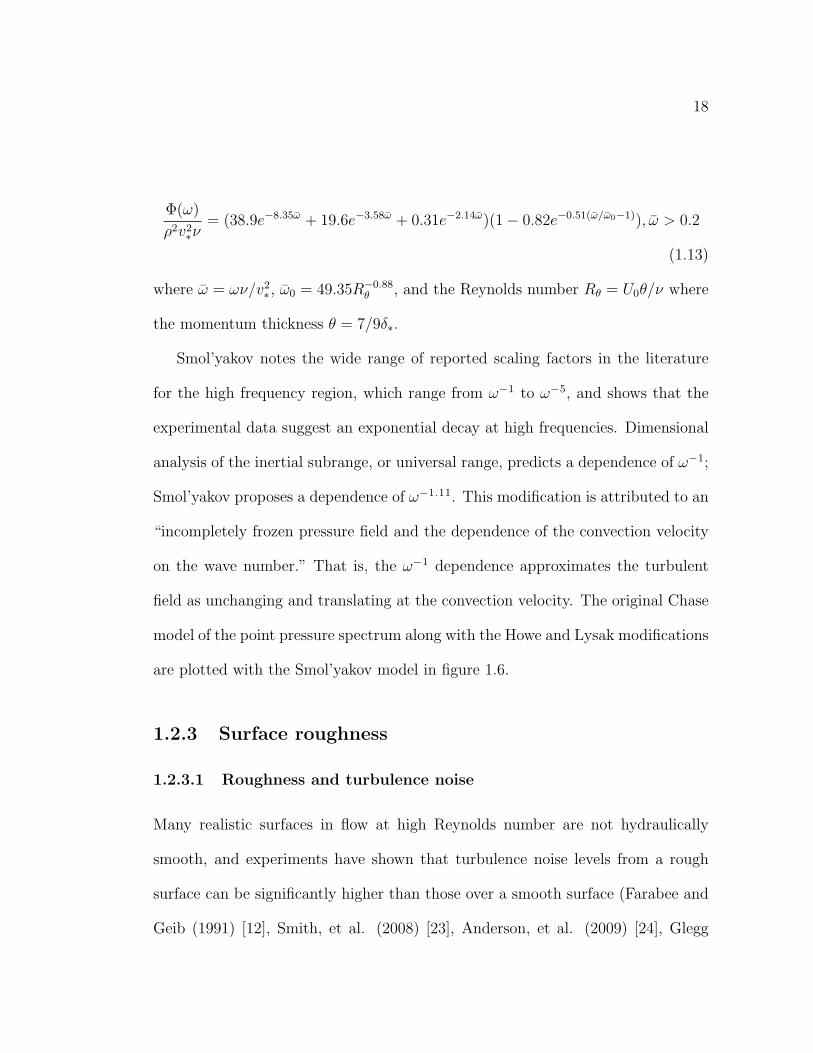
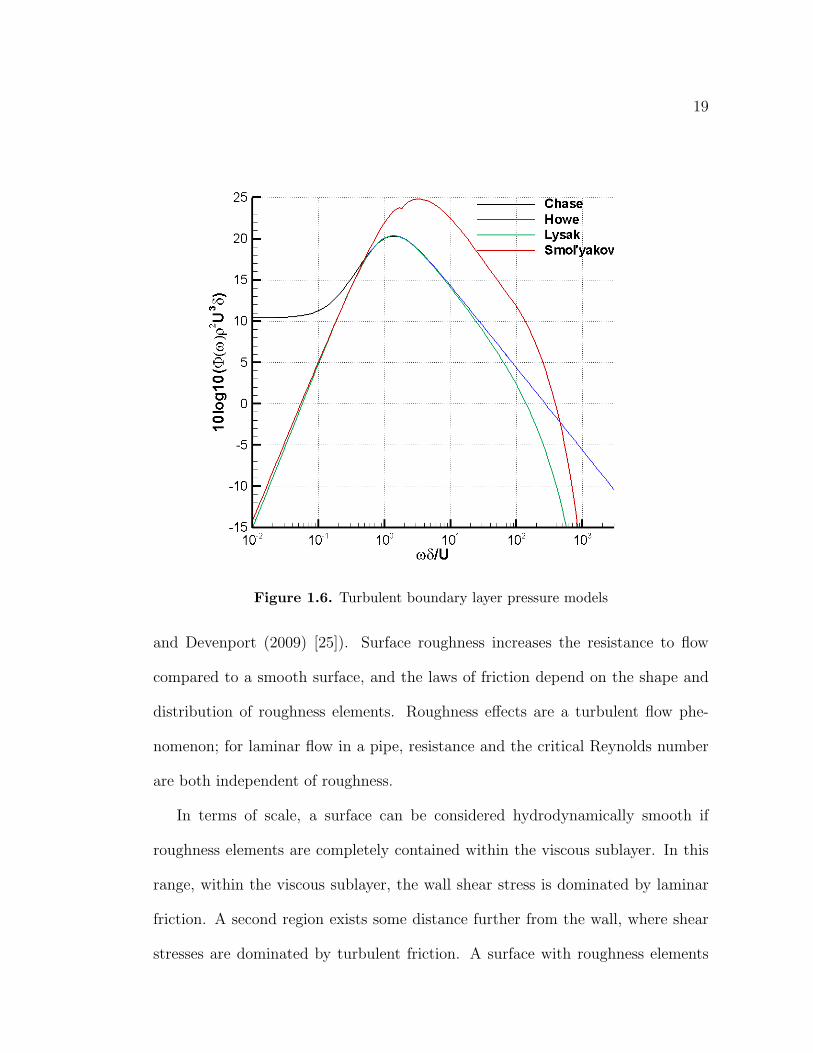
= (38.9e−8.35ω + 19.6e−3.58ω + 0.31e−2.14ω)(1− 0.82e−0.51(ω/ω0−1)), ω > 0.2
(1.13)
where ω = ων/v2∗, ω0 = 49.35R−0.88
θ , and the Reynolds number Rθ = U0θ/ν where
the momentum thickness θ = 7/9δ∗.
Smol’yakov notes the wide range of reported scaling factors in the literature
for the high frequency region, which range from ω−1 to ω−5, and shows that the
experimental data suggest an exponential decay at high frequencies. Dimensional
analysis of the inertial subrange, or universal range, predicts a dependence of ω−1;
Smol’yakov proposes a dependence of ω−1.11. This modification is attributed to an
“incompletely frozen pressure field and the dependence of the convection velocity
on the wave number.” That is, the ω−1 dependence approximates the turbulent
field as unchanging and translating at the convection velocity. The original Chase
model of the point pressure spectrum along with the Howe and Lysak modifications
are plotted with the Smol’yakov model in figure 1.6.
1.2.3 Surface roughness
1.2.3.1 Roughness and turbulence noise
Many realistic surfaces in flow at high Reynolds number are not hydraulically
smooth, and experiments have shown that turbulence noise levels from a rough
surface can be significantly higher than those over a smooth surface (Farabee and
Geib (1991) [12], Smith, et al. (2008) [23], Anderson, et al. (2009) [24], Glegg
19
Figure 1.6. Turbulent boundary layer pressure models
and Devenport (2009) [25]). Surface roughness increases the resistance to flow
compared to a smooth surface, and the laws of friction depend on the shape and
distribution of roughness elements. Roughness effects are a turbulent flow phe-
nomenon; for laminar flow in a pipe, resistance and the critical Reynolds number
are both independent of roughness.
In terms of scale, a surface can be considered hydrodynamically smooth if
roughness elements are completely contained within the viscous sublayer. In this
range, within the viscous sublayer, the wall shear stress is dominated by laminar
friction. A second region exists some distance further from the wall, where shear
stresses are dominated by turbulent friction. A surface with roughness elements
20
Viscous sublayer
Inertial sublayer
r
U∞
Figure 1.7. Turbulent boundary layer velocity profile
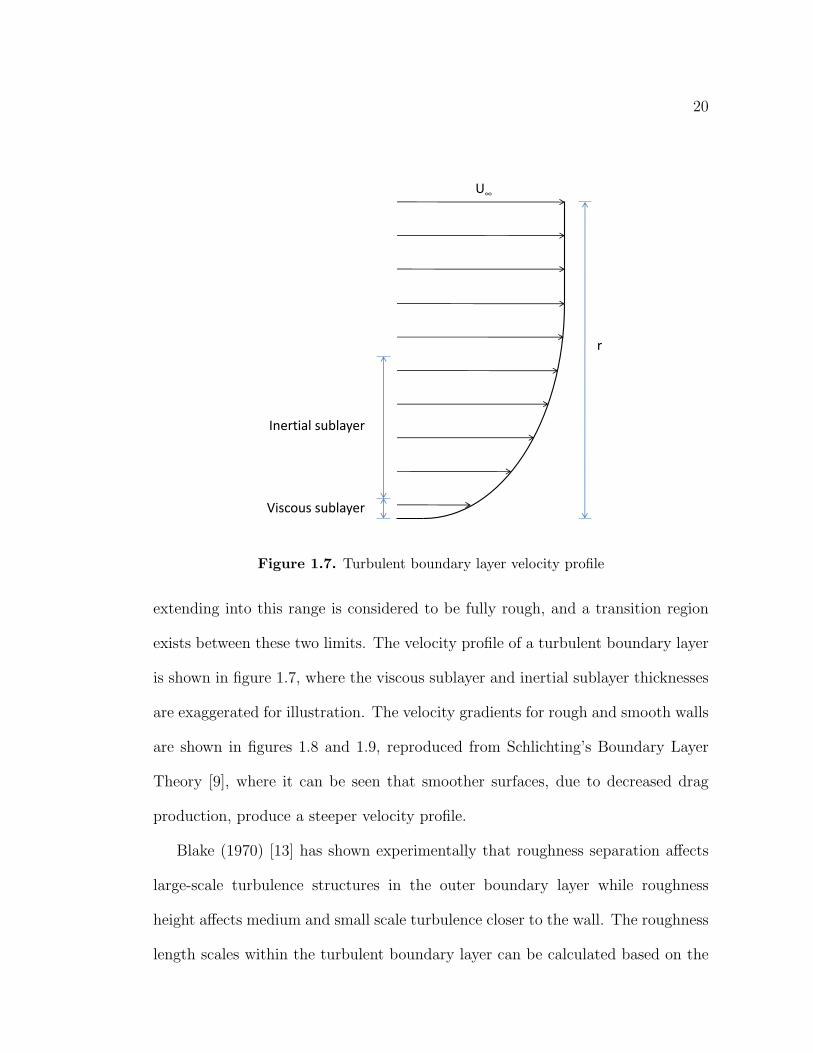
extending into this range is considered to be fully rough, and a transition region
exists between these two limits. The velocity profile of a turbulent boundary layer
is shown in figure 1.7, where the viscous sublayer and inertial sublayer thicknesses
are exaggerated for illustration. The velocity gradients for rough and smooth walls
are shown in figures 1.8 and 1.9, reproduced from Schlichting’s Boundary Layer
Theory [9], where it can be seen that smoother surfaces, due to decreased drag
production, produce a steeper velocity profile.
Blake (1970) [13] has shown experimentally that roughness separation affects
large-scale turbulence structures in the outer boundary layer while roughness
height affects medium and small scale turbulence closer to the wall. The roughness
length scales within the turbulent boundary layer can be calculated based on the

21
Figure 1.8. Surface roughness and velocity profile (Schlichting)
characteristics of the fluid and the flow conditions of the experiment. Schlicht-
ing’s equations 20.15 [9], reproduced here as equations 1.14 - 1.16, describe three
roughness regimes: hydraulically smooth, transitionally rough, and fully rough,
ksv∗/ν ≤ 5 (1.14)
5 < ksv∗/ν ≤ 70 (1.15)
ksv∗/ν > 70 (1.16)
where ks is the roughness height, v∗ is the friction velocity, and ν is the kinematic
viscosity.

22
Figure 1.9. Surface roughness and velocity profile (Schlichting)
Friction velocity is calculated by first calculating the friction factor (equation
1.17) and wall shear stress (equation 1.18) by Schlichting [9],
∆P = fL
D
ρV 2bulk
2(1.17)
τw = fρV 2
bulk
8(1.18)
where ∆P is the measured static pressure drop across the test section, f is the
friction factor, L is the distance between the pressure taps, D is the pipe diameter,
Vbulk is the bulk (average) velocity, and τw is the wall shear stress. The friction
velocity v∗ is defined as√τw/ρ.
Smooth wall-generated turbulence noise follows a quadrupole scaling, meaning
sound intensity is proportional to the eighth power of the flow velocity. In this
case, sound is generated within the boundary layer and the wall simply acts as a
reflector. Roughness-generated noise follows a dipole scaling and sound intensity is
23
proportional to the sixth power of the flow velocity. Roughness-generated sound is
generated at the surface boundary and is primarily due to scattering of convective
pressures which distributes energy to lower wavenumbers (Howe (1991) [22], Smith,
et al. (2008) [23], Anderson, et al. (2009) [24]). Anderson, et al. add that each
roughness element may be viewed as an individual dipole source where the resultant
sound is a summation of the noise generated over each element. However, direct
noise radiation from low Mach number turbulent flow is very weak, and an increase
in surface roughness will not greatly enhance this noise. It is likely the scattering
of convective pressures to lower wavenumbers by surface roughness which may
increase fluid-structure interaction that is particularly important.
Roughness effects may be more significant in water flow than in air for a given
element size, where boundary layers are generally thinner due to increased fluid
density which increases relative roughness heights. The present study seeks to
quantify smooth, transitionally rough, and fully rough surfaces, and how varying
surface roughness affects the pressure spectrum in a turbulent boundary layer,
particularly at low wavenumbers.
1.2.3.2 Response to a step change in roughness
The 1.2 m test section interior was roughened and the adjacent piping segments
were left untreated, introducing a step change in surface roughness. The response
of a turbulent boundary layer to a step change in roughness has been described by
Antonia and Luxton (1971) [26] [27] and Cheng and Castro (2002) [28]. Measure-
ments suggest an inner layer which forms on the leading edge of the roughness step
and propagates downstream into the mean flow. Thus, effects on the mean flow

24
take some time to reach a steady state, while small scale turbulence production
and scattering of convective structures happens immediately. This scattering is
the primary source of increased low-wavenumber pressures.
Chapter 2Experimental methods and
mathematical formulations
2.1 Pipe configuration
A cylindrical aluminum test section is used to inversely measure low-wavenumber
fluctuating turbulent wall-pressures in pipe flow. The thin aluminum shell is placed
in series within a longer piping system and its response to flow is measured by a
series of circumferentially positioned accelerometers. At low Mach number, low-
wavenumber pressures do not radiate strongly compared to convective pressures,
but do couple well to structures in flow when the structural length scale is compara-
ble to the wavelength of the fluctuating pressures. Therefore, in the present setup,
the cylinder acts as a structural wavevector filter to measure the low-wavenumber
pressure spectrum at a series of discrete frequencies corresponding to the resonant
modes of the shell.
Performing the experiment in water rather than air allows the low-wavenumber
26
region of the pressure spectrum to be more easily measured for two reasons. The
convective region is shifted up due to the decrease in practical flow speeds compared
to air flow, and the acoustic domain is shifted down due to the higher sound speed
in water (1480 m/s) than air (340 m/s). Both of these effects extend the effective
range of the low-wavenumber region.
1.2m aluminum pipe14m = 93 pipe diameters To reserve tank
48” Water Tunnel = 400 kL reservoir
Upstream flow conditioning plate 61 cm test section
Figure 2.1. Pipe flow configuration
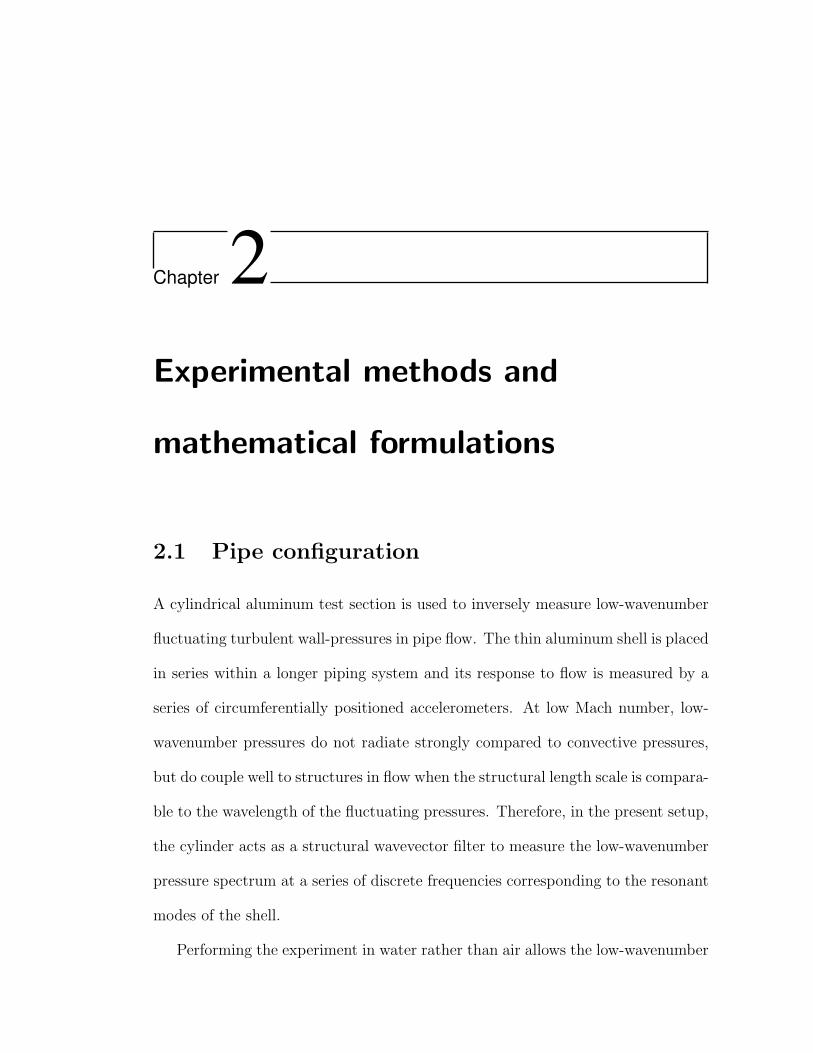
Integral to the present experiment is the utilization of static head to drive water
flow through the measurement apparatus, eliminating the need for noisy machinery
to move the fluid. As shown in figure 2.1, a 400,000 L reservoir drives water through
the 61 cm long, 150 mm diameter test section producing fully developed turbulent
pipe flow with an average free stream velocity of approximately 6 m/s. The present
configuration provides approximately 93 pipe diameters from the upstream flow
27
conditioning plate to the start of the test section. A perforated 1-7-13 Laws type
flow conditioning plate (Laws (1990) [29]) is installed after the upstream gate
valve to minimize the effect of the valve and preceding 90◦ bend on the mean flow.
Care is taken to fare the transition at the flange between the test section and the
upstream pipe section to minimize any potential discontinuity.
a
t
L
ttg
tS40
3 2 1
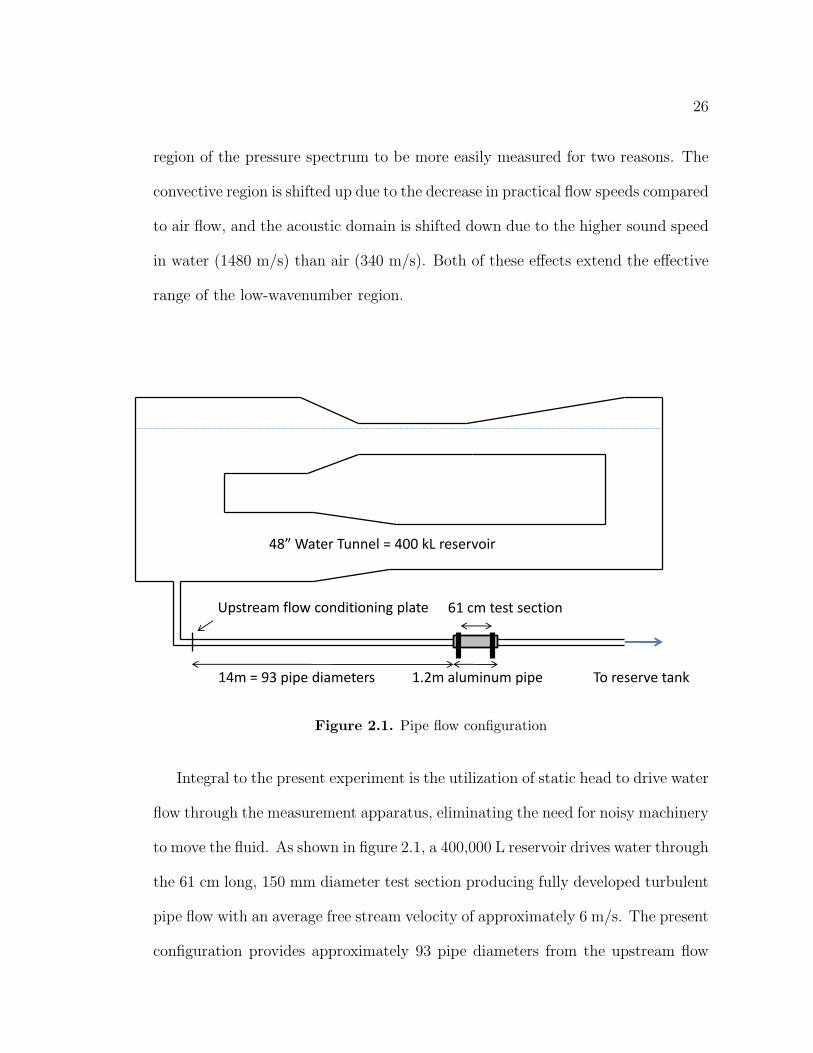
Figure 2.2. Test section and wall detail
The 61 cm long cylindrical aluminum test section is machined into the center
of a 1.2 m long, 150 mm diameter schedule 40 aluminum pipe to a thickness of
3.2 mm with grooves machined at each end to a thickness of 0.64 mm to simulate
simply supported boundary conditions (see figures 2.2 and 2.3 and table 2.1). The
28
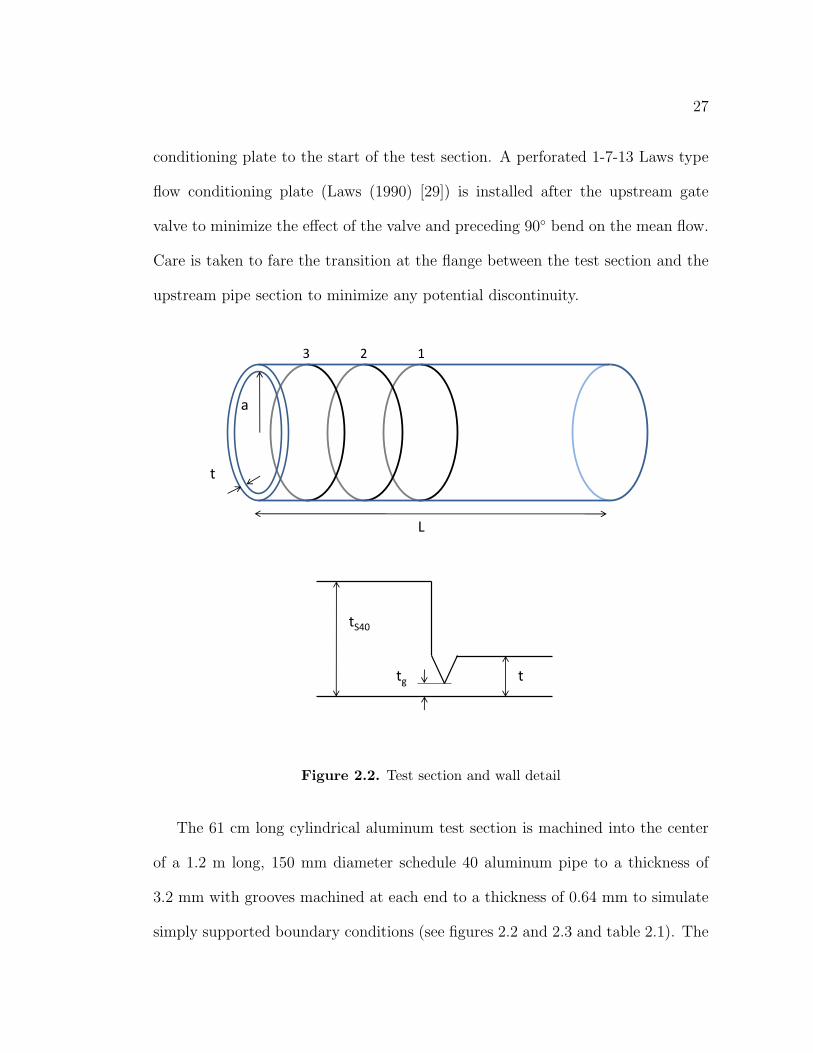
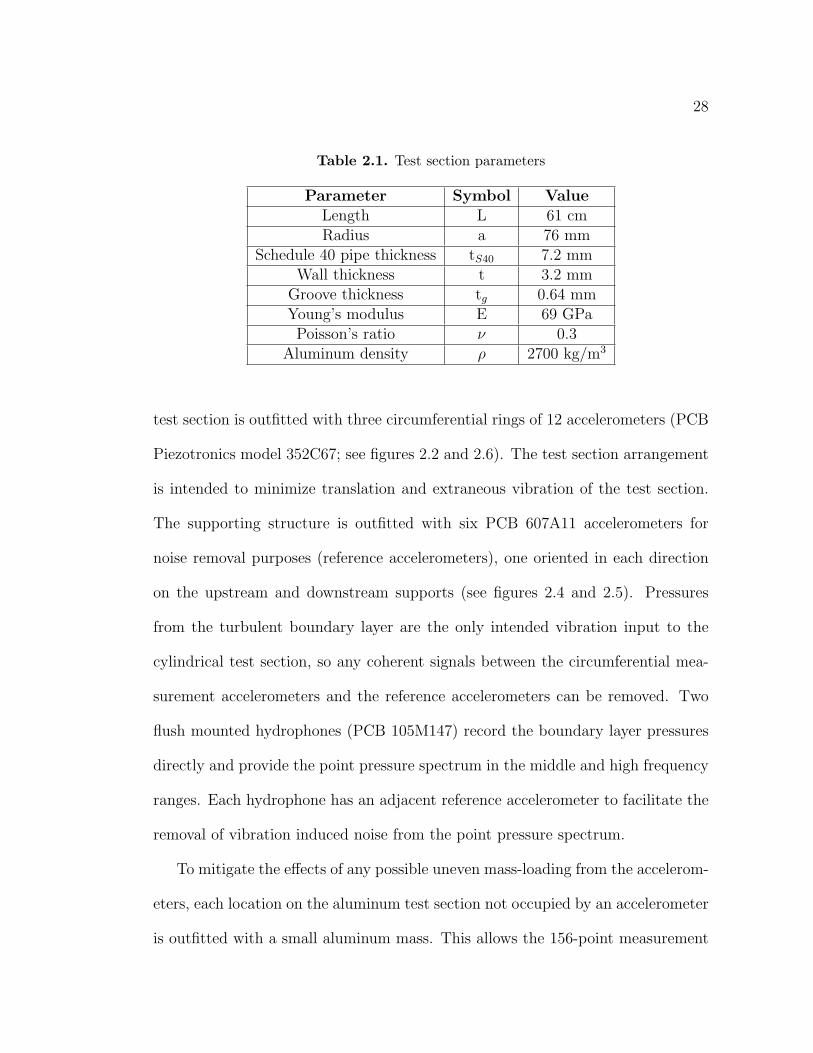
Table 2.1. Test section parameters
Parameter Symbol ValueLength L 61 cmRadius a 76 mm
Schedule 40 pipe thickness tS40 7.2 mmWall thickness t 3.2 mm
Groove thickness tg 0.64 mmYoung’s modulus E 69 GPa
Poisson’s ratio ν 0.3Aluminum density ρ 2700 kg/m3
test section is outfitted with three circumferential rings of 12 accelerometers (PCB
Piezotronics model 352C67; see figures 2.2 and 2.6). The test section arrangement
is intended to minimize translation and extraneous vibration of the test section.
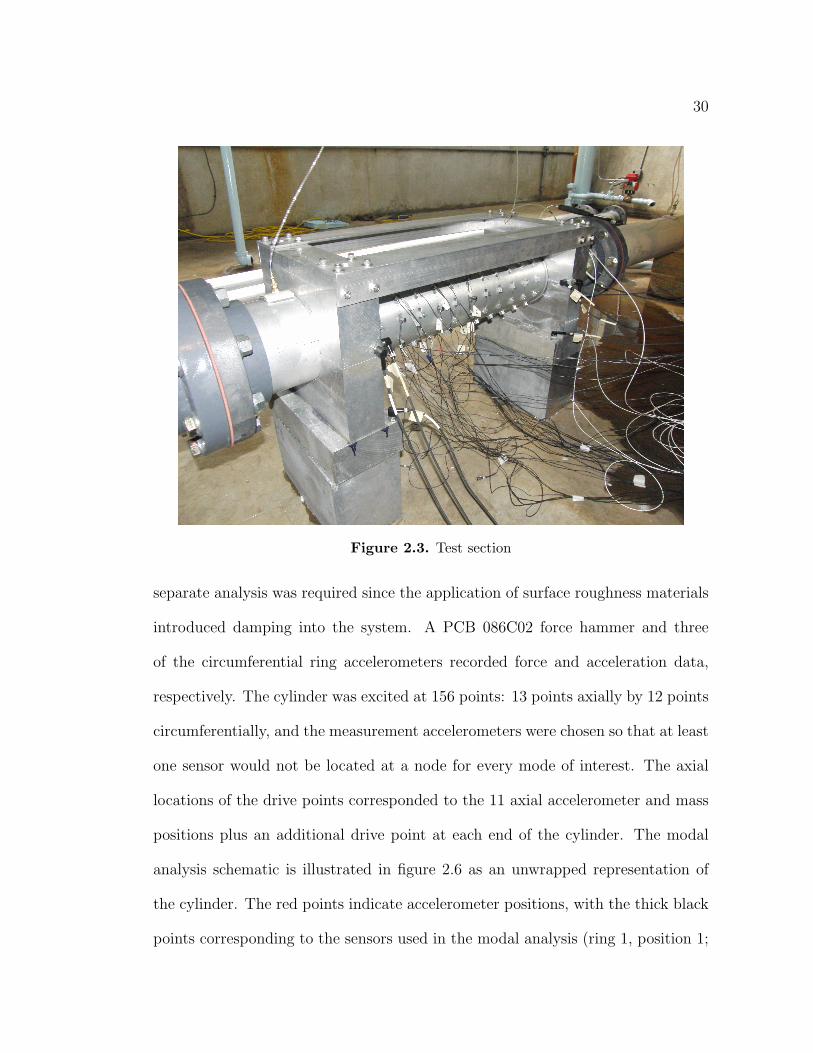
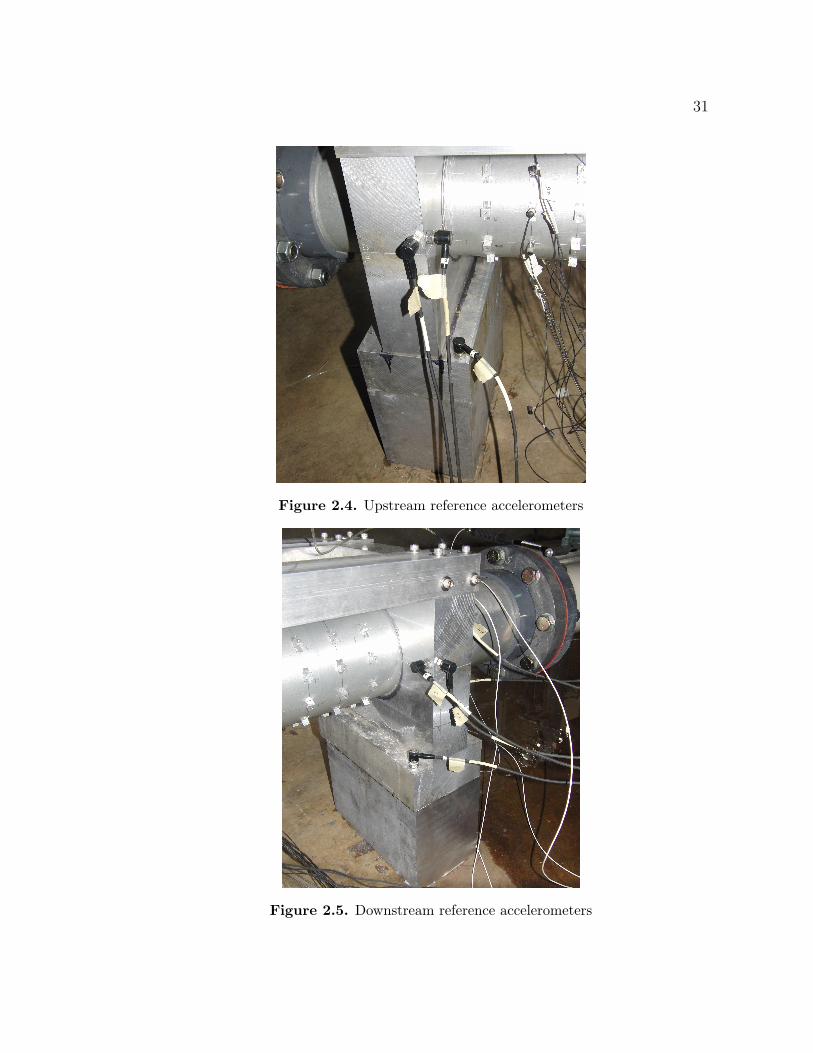
The supporting structure is outfitted with six PCB 607A11 accelerometers for
noise removal purposes (reference accelerometers), one oriented in each direction
on the upstream and downstream supports (see figures 2.4 and 2.5). Pressures
from the turbulent boundary layer are the only intended vibration input to the
cylindrical test section, so any coherent signals between the circumferential mea-
surement accelerometers and the reference accelerometers can be removed. Two
flush mounted hydrophones (PCB 105M147) record the boundary layer pressures
directly and provide the point pressure spectrum in the middle and high frequency
ranges. Each hydrophone has an adjacent reference accelerometer to facilitate the
removal of vibration induced noise from the point pressure spectrum.
To mitigate the effects of any possible uneven mass-loading from the accelerom-
eters, each location on the aluminum test section not occupied by an accelerometer
is outfitted with a small aluminum mass. This allows the 156-point measurement
29
grid over the whole cylinder to be evenly loaded, where a flat spot has been ma-
chined at each grid point to aid in the placement of accelerometers and masses.
Flow speeds are measured via a pitot-static probe at the centerline of the pipe,
just downstream of the test section. A pitot-static tube measures total (stagnation)
and static pressure through openings on the front and side of the tube, respectively.
The stagnation pressure is related to the static and dynamic pressures by equation
2.1,
Ptotal = Pstatic +1
2ρv2 (2.1)
where the second term on the right is the dynamic pressure and can be solved for
velocity.
All flow measurements are recorded simultaneously in the time domain onto
a National Instruments PXI 1033 data acquisition system and are processed in
Matlab.
2.2 Modal analysis
A thin aluminum cylinder is utilized in this experiment as a spatial filter. In order
to extract the fluctuating turbulent boundary layer pressures from flow-induced
vibration levels, its modal parameters must first be measured. The parameters
of interest include the resonant frequency, modal mass, damping loss factor, and
mode shape function for each mode. Radiation loss factors are assumed to be
negligible for the modes of interest. A roving force hammer modal analysis was
performed on the fluid-filled pipe under each of the three roughness conditions; a
30
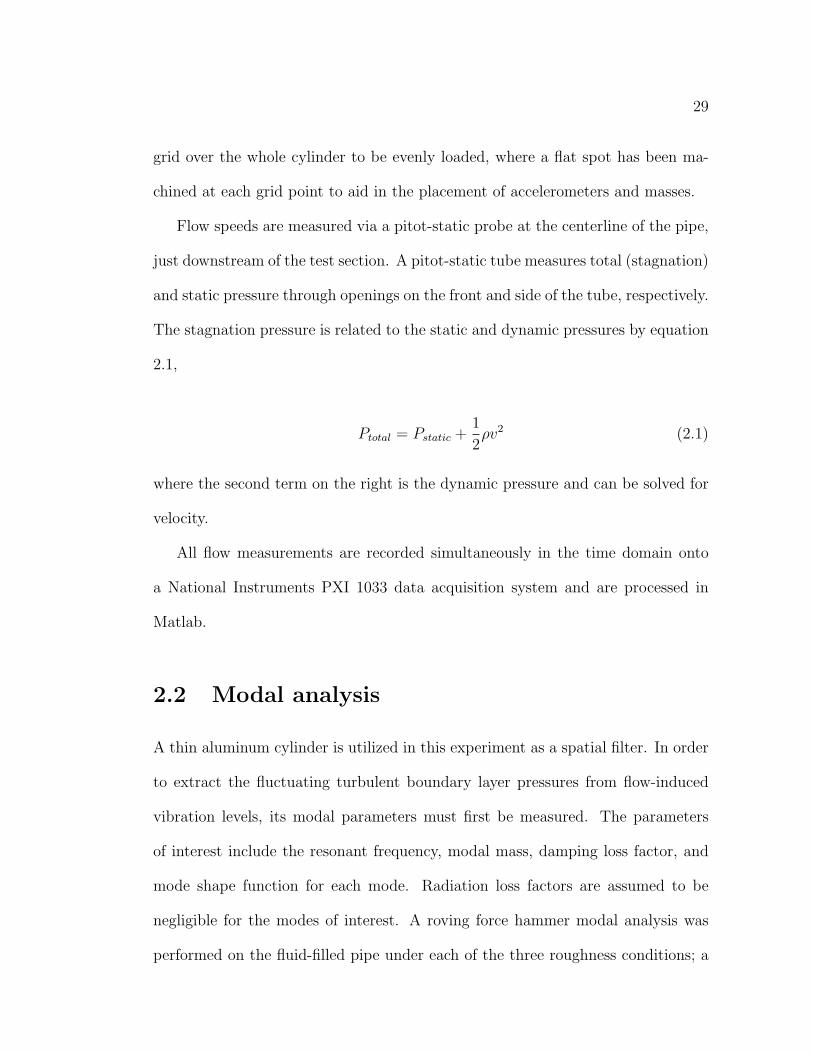
Figure 2.3. Test section
separate analysis was required since the application of surface roughness materials
introduced damping into the system. A PCB 086C02 force hammer and three
of the circumferential ring accelerometers recorded force and acceleration data,
respectively. The cylinder was excited at 156 points: 13 points axially by 12 points
circumferentially, and the measurement accelerometers were chosen so that at least
one sensor would not be located at a node for every mode of interest. The axial
locations of the drive points corresponded to the 11 axial accelerometer and mass
positions plus an additional drive point at each end of the cylinder. The modal
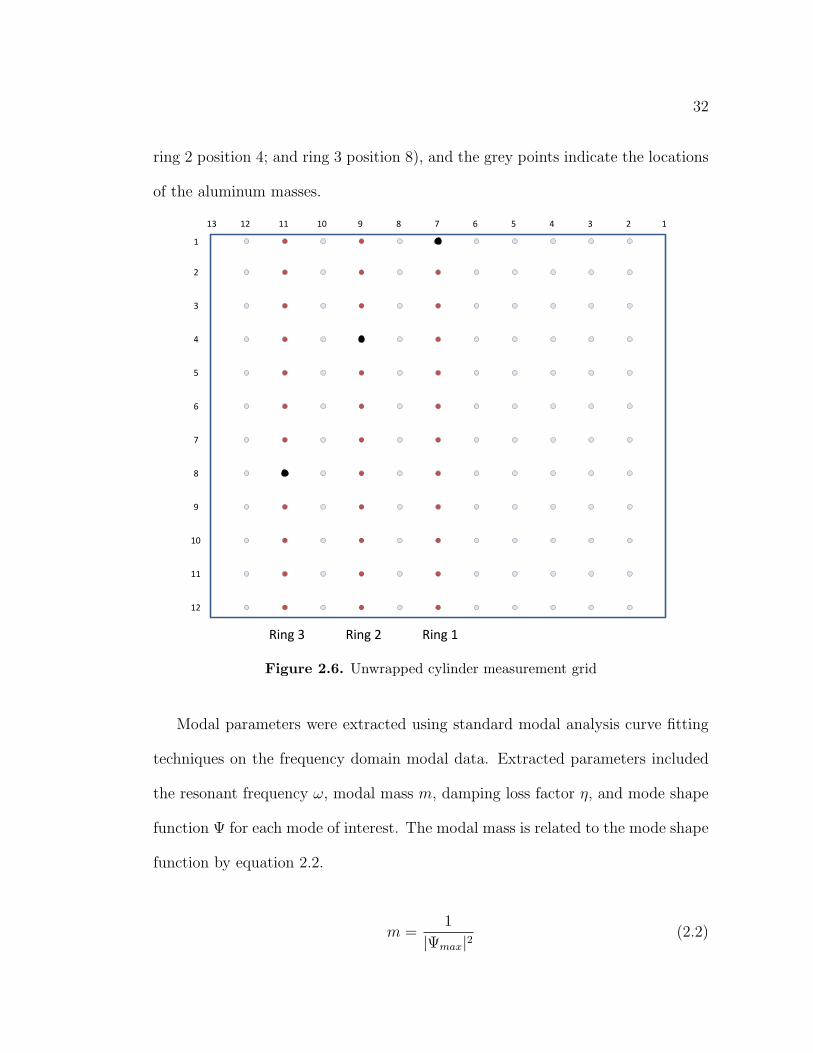
analysis schematic is illustrated in figure 2.6 as an unwrapped representation of
the cylinder. The red points indicate accelerometer positions, with the thick black
points corresponding to the sensors used in the modal analysis (ring 1, position 1;
31
Figure 2.4. Upstream reference accelerometers
Figure 2.5. Downstream reference accelerometers
32
ring 2 position 4; and ring 3 position 8), and the grey points indicate the locations
of the aluminum masses.
13 12 11 10 9 8 7 6 5 4 3 2 1
2
3
4
5
6
7
8
9
10
11
12
Ring 1Ring 2Ring 3
1
Figure 2.6. Unwrapped cylinder measurement grid
Modal parameters were extracted using standard modal analysis curve fitting
techniques on the frequency domain modal data. Extracted parameters included
the resonant frequency ω, modal mass m, damping loss factor η, and mode shape
function Ψ for each mode of interest. The modal mass is related to the mode shape
function by equation 2.2.
m =1
|Ψmax|2(2.2)
33
The curve fitting technique involves developing a frequency response function for
each mode and approximating each mode as a single- or multi-degree of freedom
system (that is, a simple harmonic oscillator or a system of coupled simple har-
monic oscillators). The modal mass controls the peak level of a mode and the
damping loss factor controls both the peak level and “sharpness” of a mode.
2.3 Quantification of surface roughness
In the present experiment, based on equations 1.14 - 1.16, the viscous sublayer
thickness is 30 µm, and surfaces with peak roughness elements smaller than this
may be considered hydraulically smooth. The fully rough regime is defined by
a surface containing roughness elements greater than 430 µm, and the transition
regime exists between these two limits.
Surface profiles of each of the three surface conditions: hydraulically smooth,
transitionally rough, and fully rough were produced using a Tencor P10 profilome-
ter. The moving stylus provided sub-Angstrom resolution of the three surfaces
over a 5 mm square measurement range. A smooth aluminum plate was used for
the hydraulically smooth condition, 180-grit cloth roll sandpaper was used for the
transitionally rough condition, and nonskid tape was used for the fully rough con-
dition. Samples of individual two-dimensional traces of the surface profiles of the
three regimes are presented in Chapter 3, with three-dimensional visualizations of
the smooth and transitionally rough surfaces. The vertical range of the profilome-
ter (+/- 500 µm) was exceeded in most measurements of the nonskid tape and
a three-dimensional representation of this surface was not obtainable. However,
34
based on limited measurements and the limitation of the profilometer, it can be
stated with confidence that the nonskid tape provides a fully rough surface, with
elements consistently greater than 430 µm in height, and often greater than 1 mm
peak-to-peak.
A spatial transform of the three-dimensional surface profile provides a visual-
ization of the distribution of roughness element sizes. A random distribution of
roughness element sizes would transform to a flat surface, similar to the flat fre-
quency response of a random time series. Conversely, a surface sinusoidal in one
dimension would exhibit a ridge in the spatial transform, and a surface sinusoidal
in both dimensions (producing a series of uniform bumps) would have two perpen-
dicular ridges, representing the length scales of the elements in each dimension.
Surface profile figures are presented in Chapter 3.
2.4 Inverse method of determining turbulent
boundary layer fluctuating pressure levels
In addition to measuring the turbulent wall-pressure point spectra directly via
hydrophones, the cylindrical test section’s modal response to the turbulent pipe
flow excitation is recorded via three circumferential rings of 12 accelerometers each.
Based on the modal parameters obtained from the experimental modal analysis,
the turbulent wall-pressure levels required to cause the observed vibration can be
determined. A circumferential modal decomposition is performed on the vibration
data, in which the recorded time series for each ring is transformed to the frequency
35
domain. The use of 12 accelerometers per ring and the positioning of the three
rings allow modes up to order n = 6 and m = 5 to be resolved before aliasing
occurs.
The mass-normalized spatial mode shape functions Ψn(x1, x3), having a max-
imum value of one, can be translated to sensitivity functions Sn(k1, k3) in the
wavenumber domain via a spatial transform, shown in equation 2.3. Hwang and
Maidanek (1990) [30] provide a relation for the turbulent boundary layer fluctuat-
ing pressures, the sensitivity functions, and the modal force, shown in equation 2.4,
where the normalized pressure spectrum P (k1, k3) is defined by equation 2.5. The
modal force Fn is related to the cylinder displacement and modal parameters by
equation 2.6, based on the Frequency Response Function (FRF) given by equation
2.7 (Ewins [31]) and the relation to the force at a point β, Fn(ω) = Ψn(β)F (β, ω),
S(k1, k3) =
∫ ∫A
Ψn(x1, x3)eik1x1eik3x3dx1dx3 (2.3)
|Fn(ω)|2 =
∫ ∫∞P (k1, k3, ω)|Sn(k1, k3)|2dk1dk3 (2.4)
P (k1, k3, ω) = P (k1, k3)Φpp(ω) (2.5)
un(α, ω) =1
mn
Ψn(α)Fn(ω)[− ω2 + ω2
n + iηnωnω] (2.6)
un(α, ω)
F (β, ω)=
1
mn
Ψn(α)Ψn(β)[− ω2 + ω2
n + iηnωnω] (2.7)
36
where un is the displacement, mn, ηn, and ωn are the modal mass, loss factor,
and resonant frequency of each mode, respectively, and α and β are points on the
structure. The FRF relates the displacement at a point α to the force at a point
β as a function of frequency.
Accelerance can be computed from equation 2.7 by relating displacement and
acceleration through a factor of ω2 and compared to the accelerance obtained
from the roving force hammer modal analysis. The modal parameters are then
adjusted until the two sets of response curves match, where the calculated curve
is a sum of the FRFs of all modes. Once the modal parameters are known, the
modal force can be calculated using the measured peak displacements un from flow-
induced vibration using equation 2.6 and compared to the modal force computed
by equation 2.4, where P (k1, k3, ω) is assumed to be wavenumber-white. This
wavenumber-white, or constant amplitude pressure level is given by equation 2.8
[32],
P (k1, k3, ω) = H0ρ2u4
τU2c ω−3e−2.2(ων/uτ ) (2.8)
where H0 is the constant level, 10−4.1, based on an assumed level of -41 dB. Fi-
nally, this input pressure level is adjusted until the forcing function based on the
measured vibration equals the predicted level based on the wavenumber-frequency
pressure spectrum.
The value of the streamwise wavenumber at each mode corresponding to the
peak pressure level is computed from the sensitivity function, which is a function
of both streamwise and cross-stream wavenumbers, k1 and k3. Pressure levels are
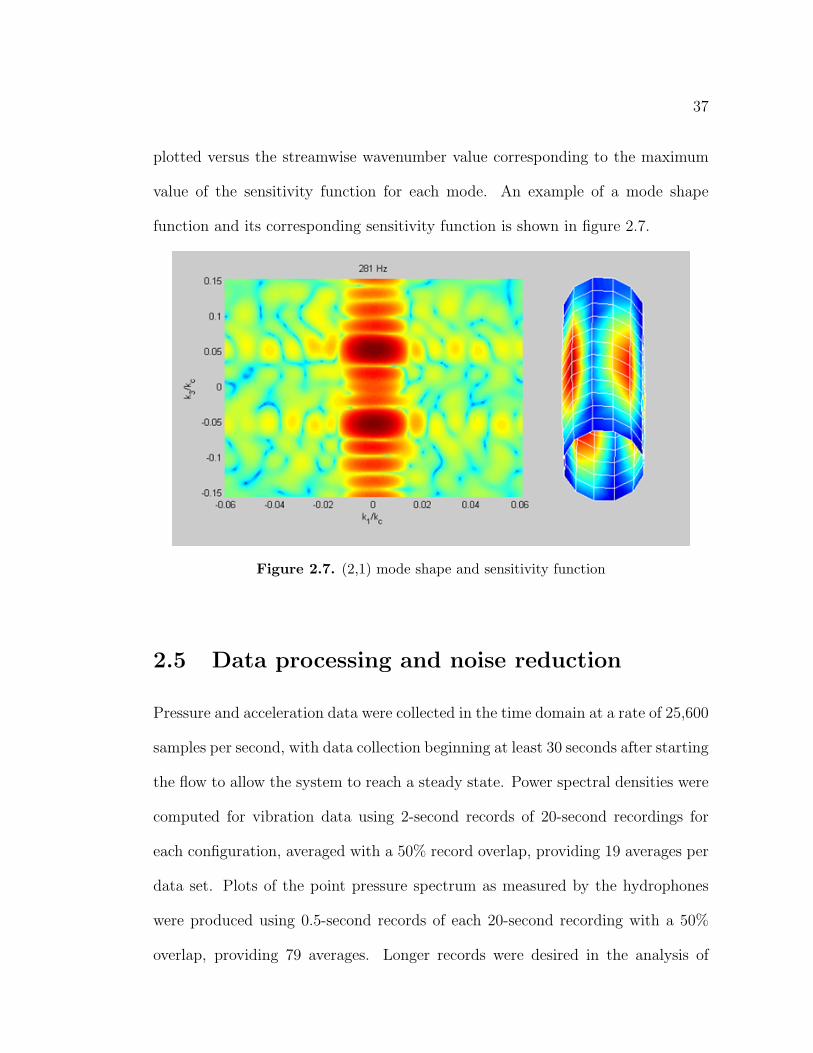
37
plotted versus the streamwise wavenumber value corresponding to the maximum
value of the sensitivity function for each mode. An example of a mode shape
function and its corresponding sensitivity function is shown in figure 2.7.
Figure 2.7. (2,1) mode shape and sensitivity function
2.5 Data processing and noise reduction
Pressure and acceleration data were collected in the time domain at a rate of 25,600
samples per second, with data collection beginning at least 30 seconds after starting
the flow to allow the system to reach a steady state. Power spectral densities were
computed for vibration data using 2-second records of 20-second recordings for
each configuration, averaged with a 50% record overlap, providing 19 averages per
data set. Plots of the point pressure spectrum as measured by the hydrophones
were produced using 0.5-second records of each 20-second recording with a 50%
overlap, providing 79 averages. Longer records were desired in the analysis of
38
vibration data to provide higher frequency resolution for the determination of
peak vibration amplitudes.
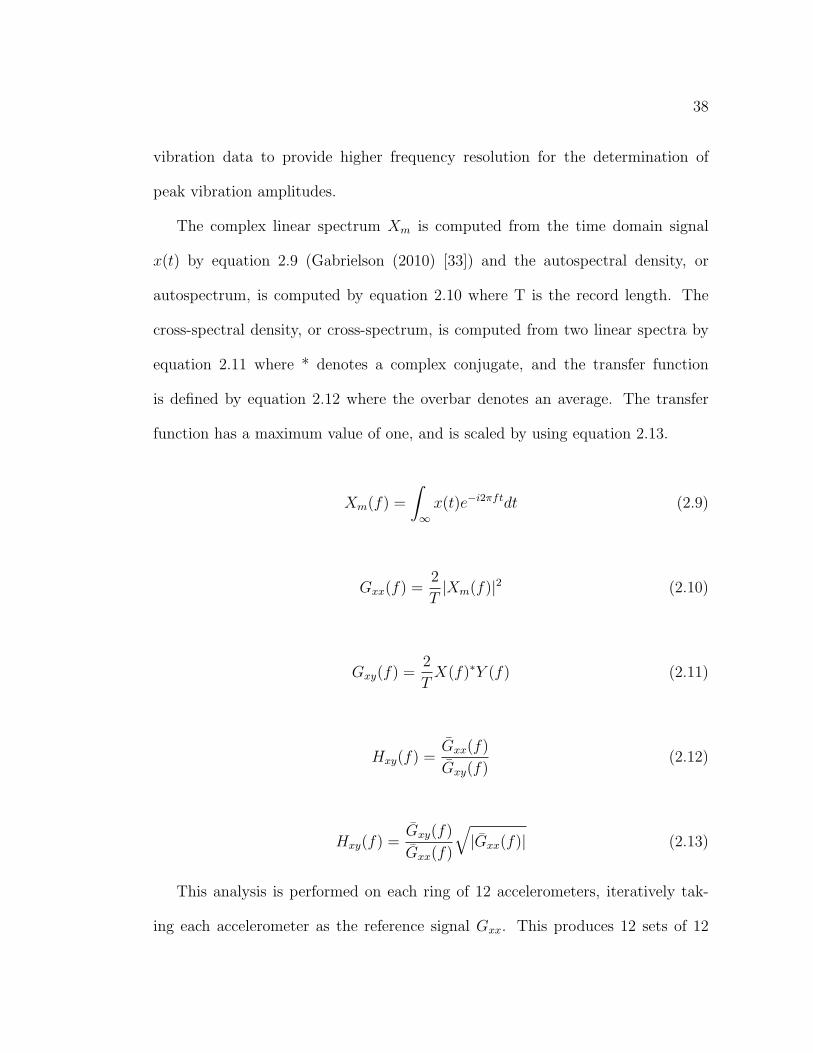
The complex linear spectrum Xm is computed from the time domain signal
x(t) by equation 2.9 (Gabrielson (2010) [33]) and the autospectral density, or
autospectrum, is computed by equation 2.10 where T is the record length. The
cross-spectral density, or cross-spectrum, is computed from two linear spectra by
equation 2.11 where * denotes a complex conjugate, and the transfer function
is defined by equation 2.12 where the overbar denotes an average. The transfer
function has a maximum value of one, and is scaled by using equation 2.13.
Xm(f) =
∫∞x(t)e−i2πftdt (2.9)
Gxx(f) =2
T|Xm(f)|2 (2.10)
Gxy(f) =2
TX(f)∗Y (f) (2.11)
Hxy(f) =Gxx(f)
Gxy(f)(2.12)
Hxy(f) =Gxy(f)
Gxx(f)
√|Gxx(f)| (2.13)
This analysis is performed on each ring of 12 accelerometers, iteratively tak-
ing each accelerometer as the reference signal Gxx. This produces 12 sets of 12
39
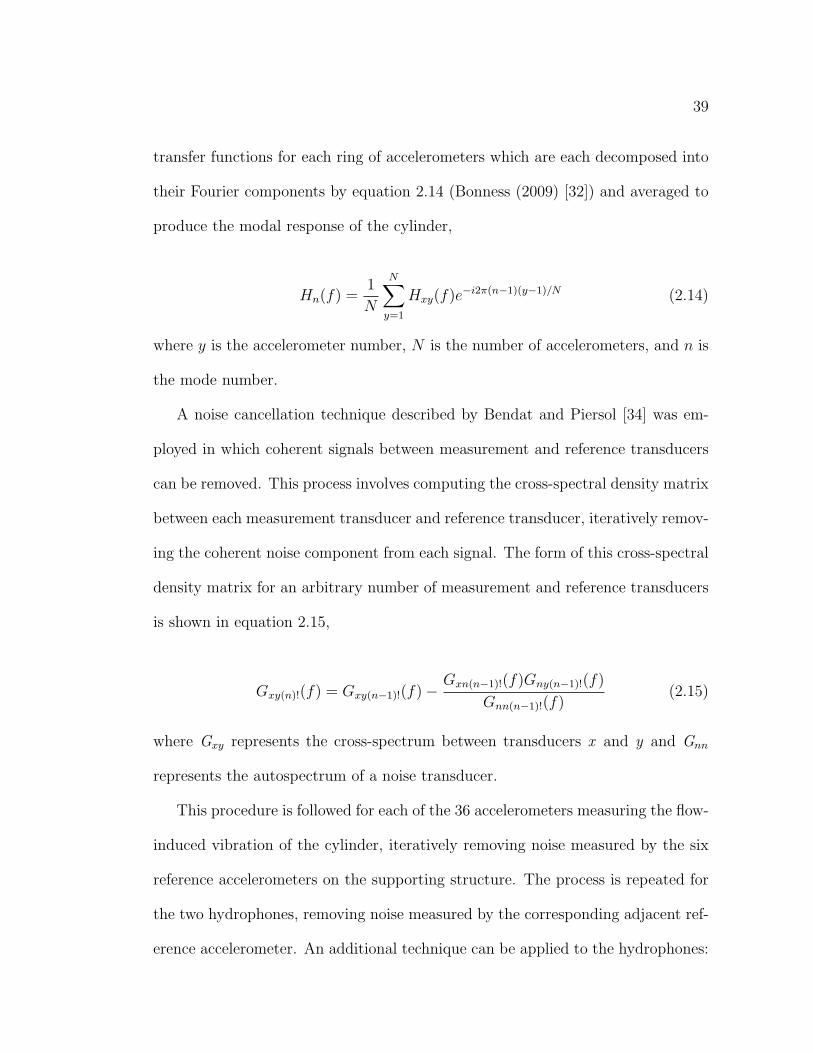
transfer functions for each ring of accelerometers which are each decomposed into
their Fourier components by equation 2.14 (Bonness (2009) [32]) and averaged to
produce the modal response of the cylinder,
Hn(f) =1
N
N∑y=1
Hxy(f)e−i2π(n−1)(y−1)/N (2.14)
where y is the accelerometer number, N is the number of accelerometers, and n is
the mode number.
A noise cancellation technique described by Bendat and Piersol [34] was em-
ployed in which coherent signals between measurement and reference transducers
can be removed. This process involves computing the cross-spectral density matrix
between each measurement transducer and reference transducer, iteratively remov-
ing the coherent noise component from each signal. The form of this cross-spectral
density matrix for an arbitrary number of measurement and reference transducers
is shown in equation 2.15,
Gxy(n)!(f) = Gxy(n−1)!(f)−Gxn(n−1)!(f)Gny(n−1)!(f)
Gnn(n−1)!(f)(2.15)
where Gxy represents the cross-spectrum between transducers x and y and Gnn
represents the autospectrum of a noise transducer.
This procedure is followed for each of the 36 accelerometers measuring the flow-
induced vibration of the cylinder, iteratively removing noise measured by the six
reference accelerometers on the supporting structure. The process is repeated for
the two hydrophones, removing noise measured by the corresponding adjacent ref-
erence accelerometer. An additional technique can be applied to the hydrophones:
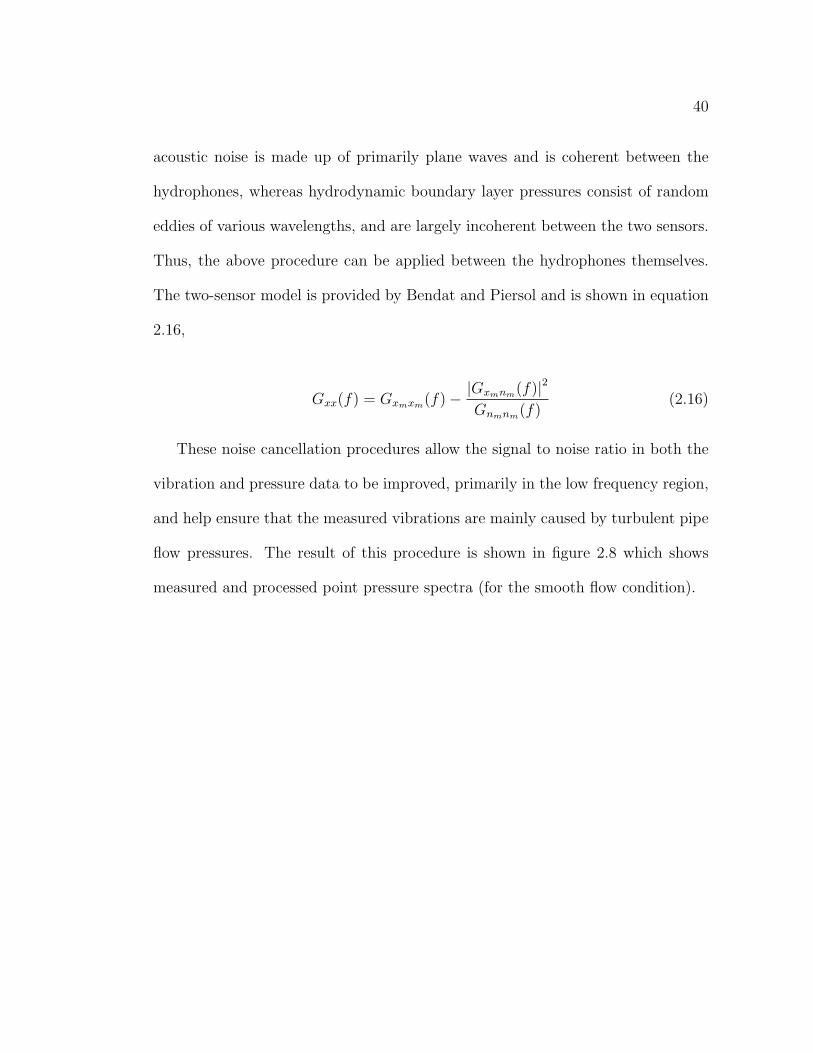
40
acoustic noise is made up of primarily plane waves and is coherent between the
hydrophones, whereas hydrodynamic boundary layer pressures consist of random
eddies of various wavelengths, and are largely incoherent between the two sensors.
Thus, the above procedure can be applied between the hydrophones themselves.
The two-sensor model is provided by Bendat and Piersol and is shown in equation
2.16,
Gxx(f) = Gxmxm(f)− |Gxmnm(f)|2
Gnmnm(f)(2.16)
These noise cancellation procedures allow the signal to noise ratio in both the
vibration and pressure data to be improved, primarily in the low frequency region,
and help ensure that the measured vibrations are mainly caused by turbulent pipe
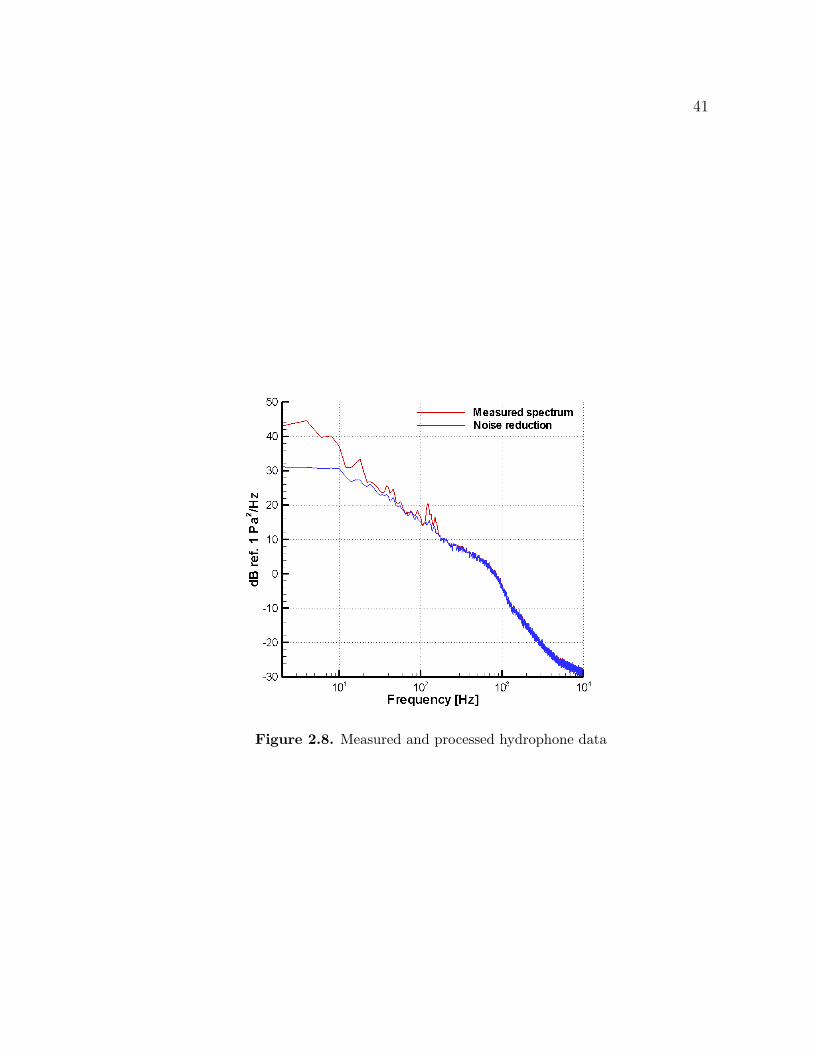
flow pressures. The result of this procedure is shown in figure 2.8 which shows
measured and processed point pressure spectra (for the smooth flow condition).
41
Figure 2.8. Measured and processed hydrophone data
Chapter 3Results
3.1 Measurement results
The present experiment utilizes a number of measurement transducers including
hydrophones which record the turbulent wall-pressure point spectra directly, ac-
celerometers which measure the cylinder’s vibration response due to the turbu-
lent pipe flow pressures and the ambient vibration of the support structure, and
a pitot-static probe for measuring flow speed. A multi-step analysis procedure
is implemented involving the circumferential modal decomposition of the cylin-
der’s response to flow and a roving force hammer modal analysis of the structure.
These procedures are required to determine the physical parameters of the fluid-
pipe system and will enable the calculation of the turbulent boundary layer forcing
function. Some of the raw measured data are presented along with results of inter-
mediate processes and calculations. Final results of the computed low-wavenumber
pressure levels are presented for the smooth and fully rough cases.
Flow is initiated by opening the upstream gate valve and downstream butterfly
43
valve and allowing the system to run for at least 60 seconds. The 20-second records
analyzed were extracted 30 to 40 seconds after the flow was started to ensure the
system had reached a steady state. Flow velocity is measured via a pitot-static
probe just downstream of the test section; the maximum and minimum flow speeds
and percent change measured over the 20-second record periods are shown in table
3.1. The friction velocity of 0.032 m/s measured by Bonness [32] was used for
the smooth pipe configuration. The 3 dB increase in level of the measured point
pressure spectrum from approximately 100 Hz - 1 kHz allows the computation of
the fully rough surface friction velocity, based on equation 1.10; v∗ (fully rough)
= 0.038 m/s. This is consistent with the calculation based on the Moody diagram
for turbulent pipe flow [35].
Table 3.1. Flow speed average, extrema, and variation
Smooth Fully roughAverage (m/s) 5.80 5.87
Maximum 5.86 5.97Minimum 5.73 5.74% change 2.17 4.01
3.1.1 Surface profiles: hydraulically smooth and fully
rough
Varying surfaces and a modular test section were needed to produce hydraulically
smooth, transitionally rough, and fully rough wall conditions, with roughness el-
ements being contained within the 30 µm viscous sublayer for smooth flow and
greater than 430 µm for fully rough flow under the present flow conditions. Surface
44
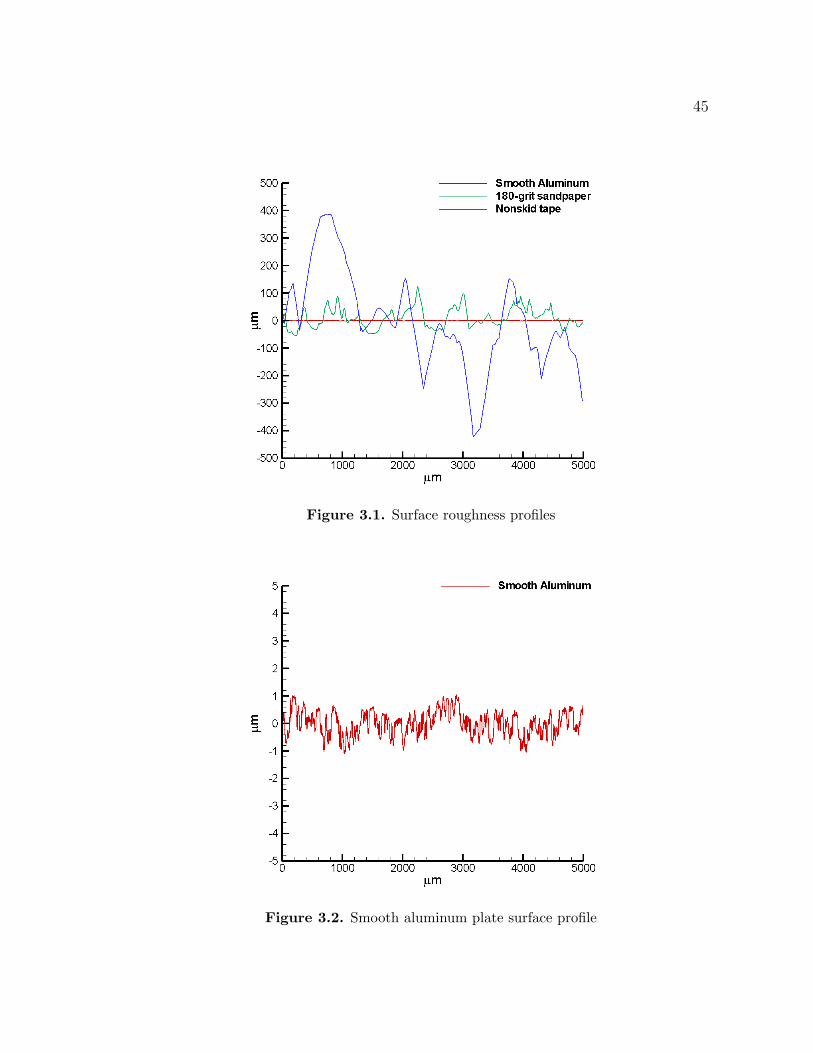
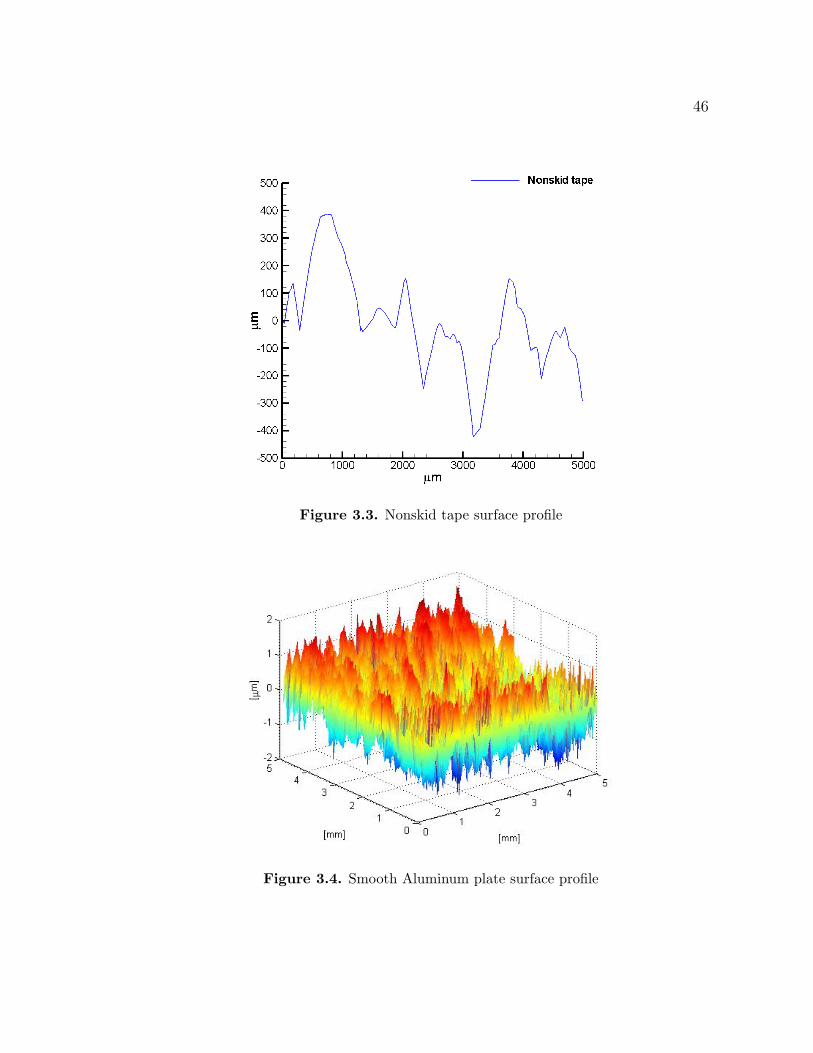
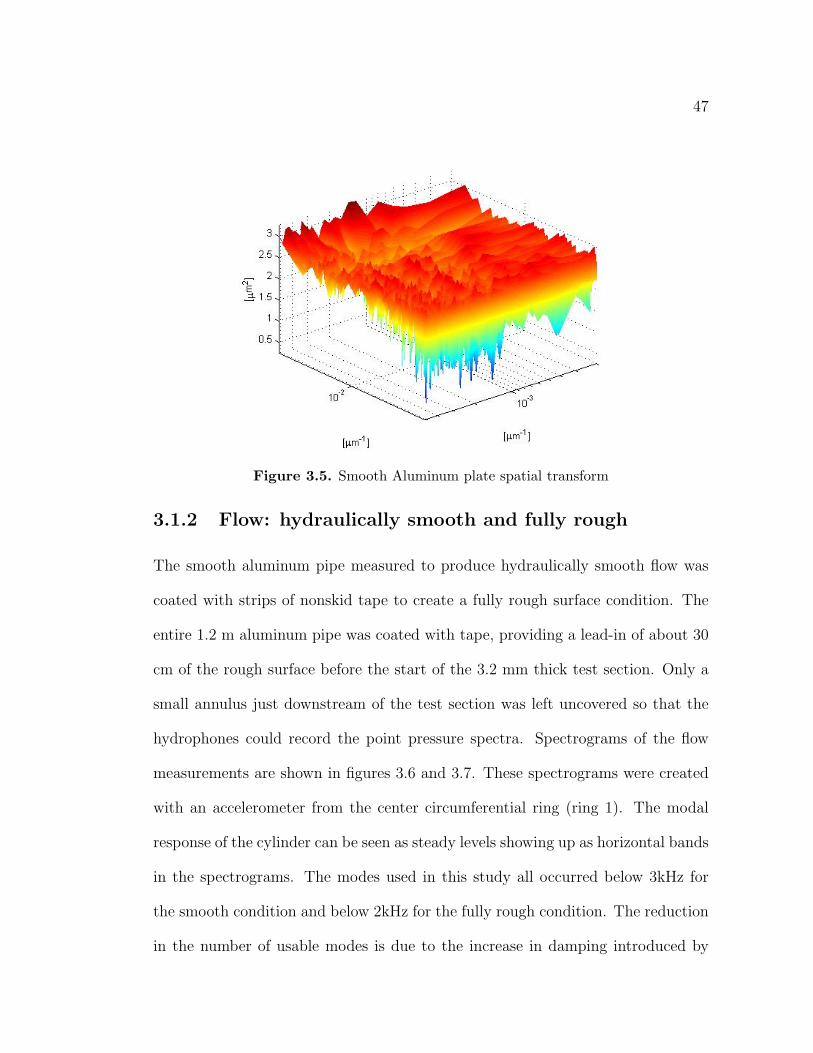
profiles of the smooth aluminum plate, 180-grit sandpaper, and nonskid tape are
shown for comparison in figure 3.1 and the smooth plate and nonskid tape are
shown separately in figures 3.2 and 3.3. A typical measurement of the smooth
aluminum plate showed roughness elements of about 2µm peak-to-peak, and the
surface did not display a range greater than 4 µm peak-to-peak for any measure-
ment, keeping well within the viscous subrange. The nonskid tape has elements
greater than 800 µm peak-to-peak on the displayed measurement and exceeded
the profilometer’s 1 mm maximum excursion several times.
A number of adjacent traces were recorded of the smooth aluminum plate and
were combined to form a three-dimensional visualization of the surface, shown
in figure 3.4. Most measurements of the nonskid tape exceeded the 1 mm peak-
to-peak range of the profilometer, therefore a three-dimensional representation of
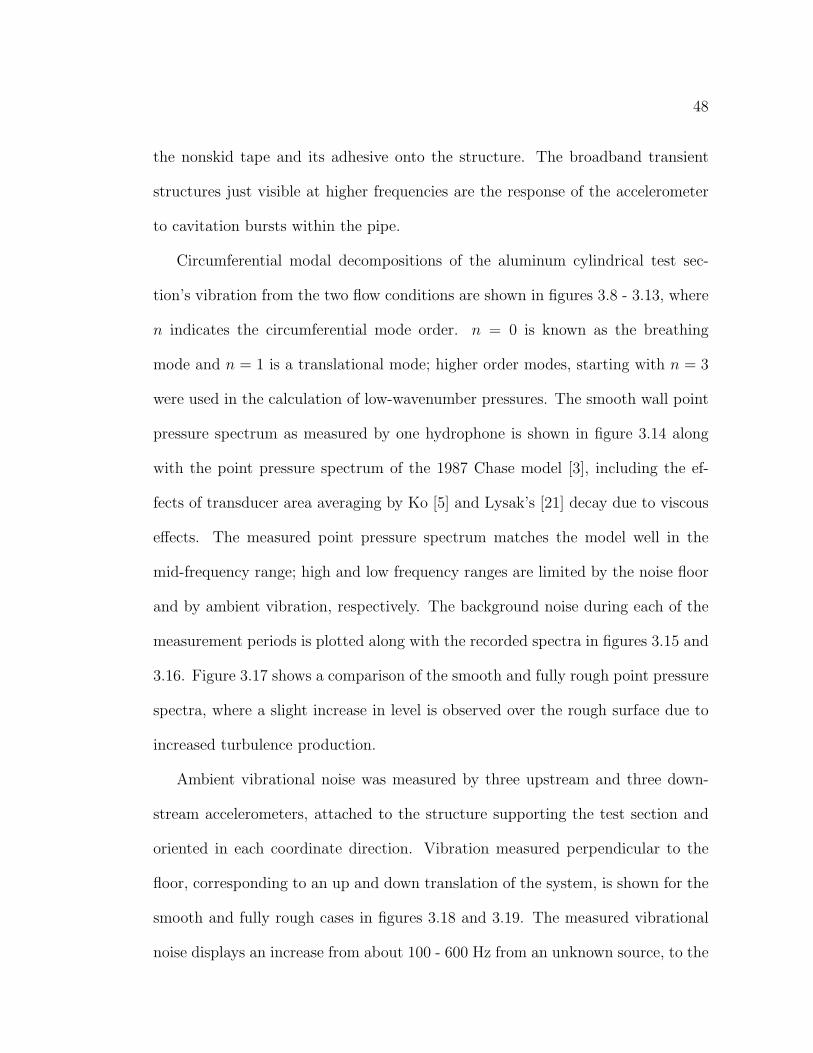
this surface could not be obtained. The spatial Fourier transform of the smooth
aluminum plate is shown in figure 3.5, where the mostly flat response indicates a
uniform surface and a wide distribution of element sizes.
45
Figure 3.1. Surface roughness profiles
Figure 3.2. Smooth aluminum plate surface profile
46
Figure 3.3. Nonskid tape surface profile
Figure 3.4. Smooth Aluminum plate surface profile
47
Figure 3.5. Smooth Aluminum plate spatial transform
3.1.2 Flow: hydraulically smooth and fully rough
The smooth aluminum pipe measured to produce hydraulically smooth flow was
coated with strips of nonskid tape to create a fully rough surface condition. The
entire 1.2 m aluminum pipe was coated with tape, providing a lead-in of about 30
cm of the rough surface before the start of the 3.2 mm thick test section. Only a
small annulus just downstream of the test section was left uncovered so that the
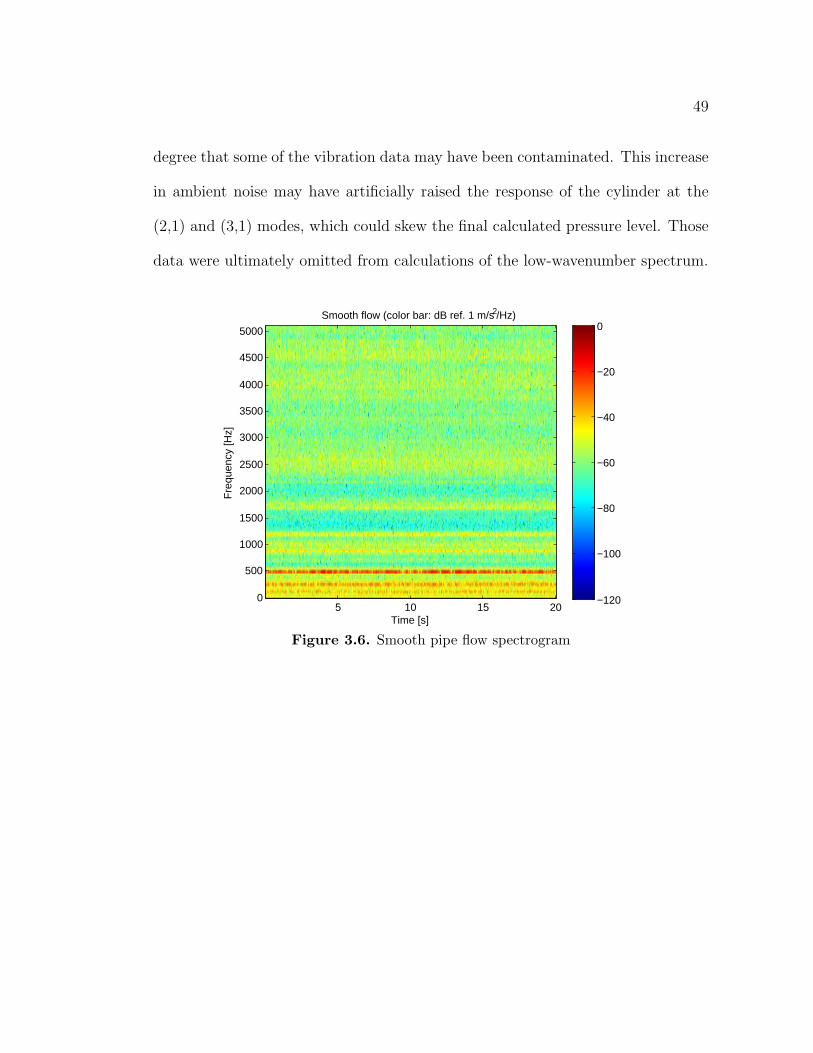
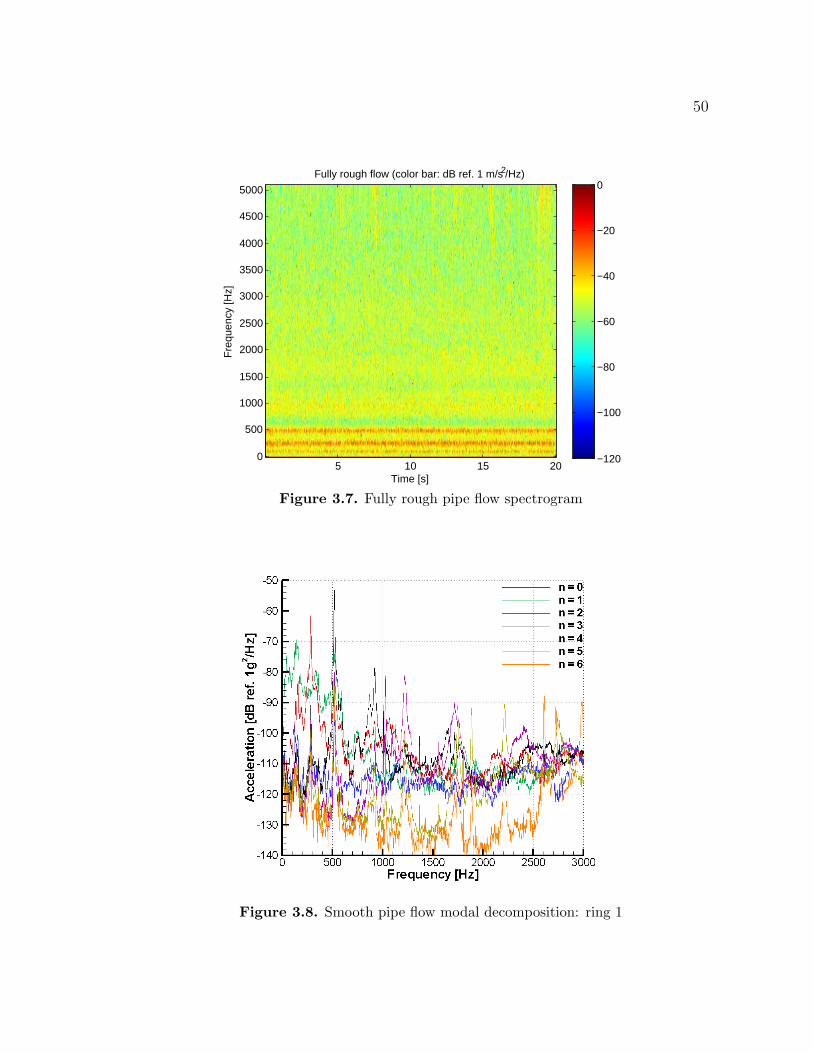
hydrophones could record the point pressure spectra. Spectrograms of the flow
measurements are shown in figures 3.6 and 3.7. These spectrograms were created
with an accelerometer from the center circumferential ring (ring 1). The modal
response of the cylinder can be seen as steady levels showing up as horizontal bands
in the spectrograms. The modes used in this study all occurred below 3kHz for
the smooth condition and below 2kHz for the fully rough condition. The reduction
in the number of usable modes is due to the increase in damping introduced by
48
the nonskid tape and its adhesive onto the structure. The broadband transient
structures just visible at higher frequencies are the response of the accelerometer
to cavitation bursts within the pipe.
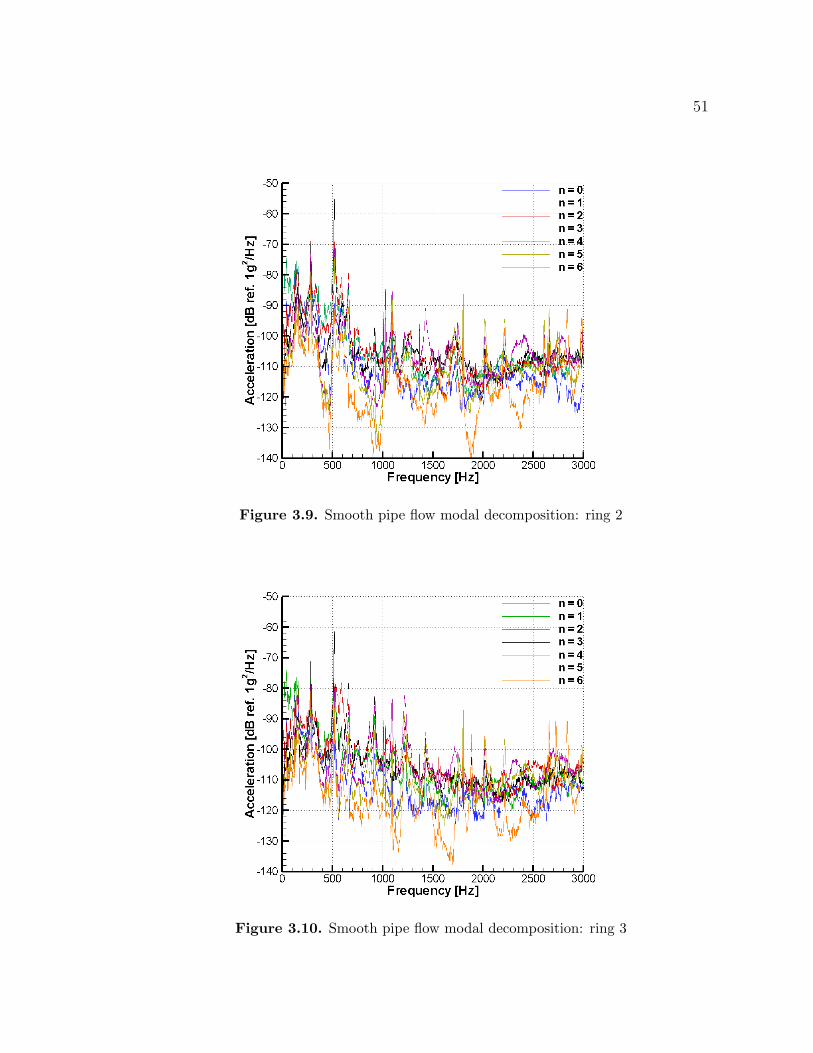
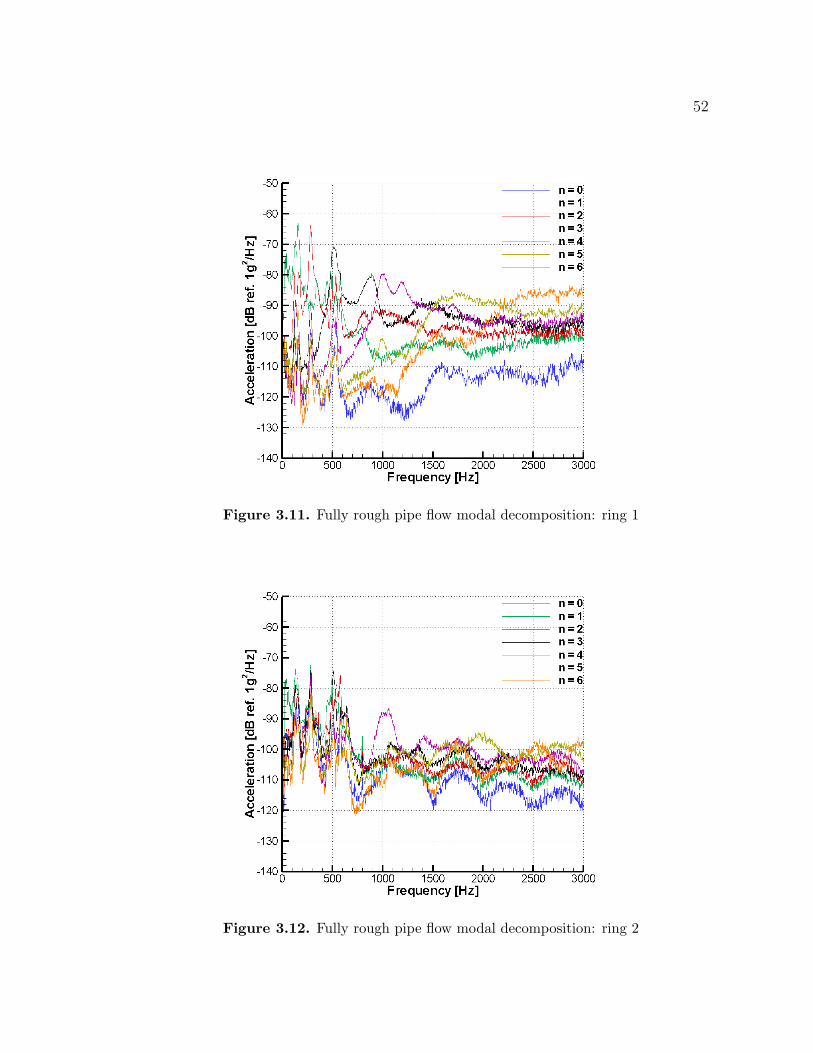
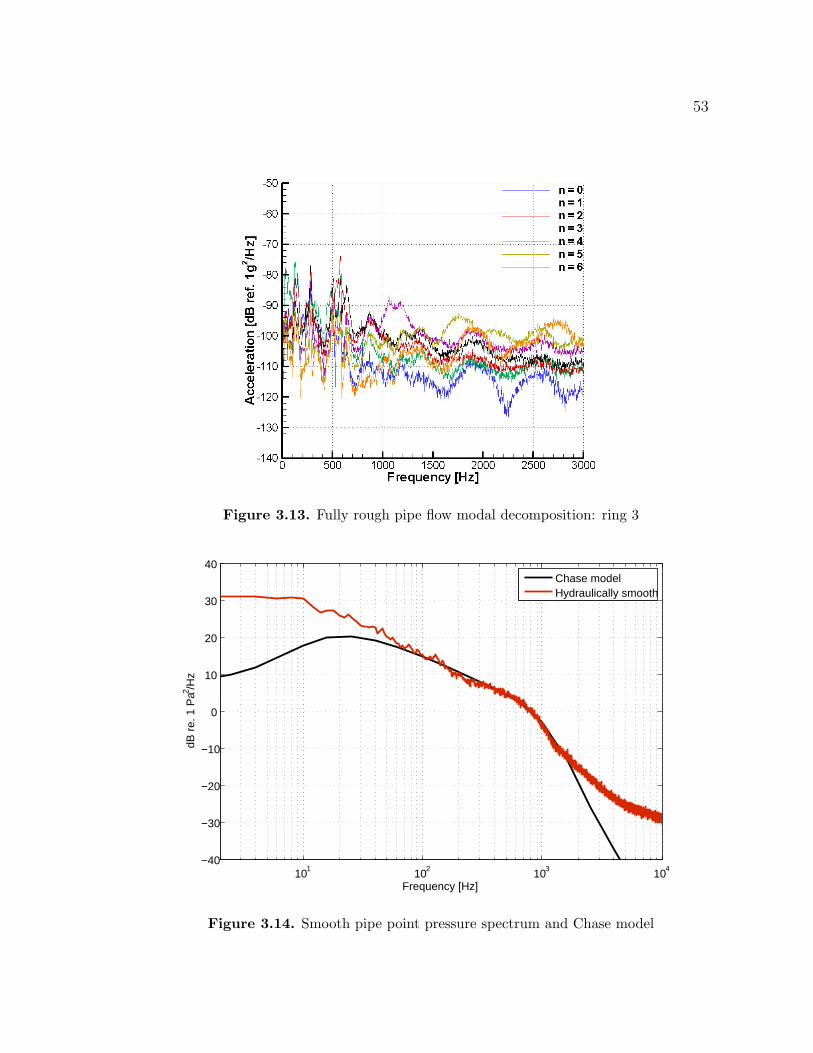
Circumferential modal decompositions of the aluminum cylindrical test sec-
tion’s vibration from the two flow conditions are shown in figures 3.8 - 3.13, where
n indicates the circumferential mode order. n = 0 is known as the breathing
mode and n = 1 is a translational mode; higher order modes, starting with n = 3
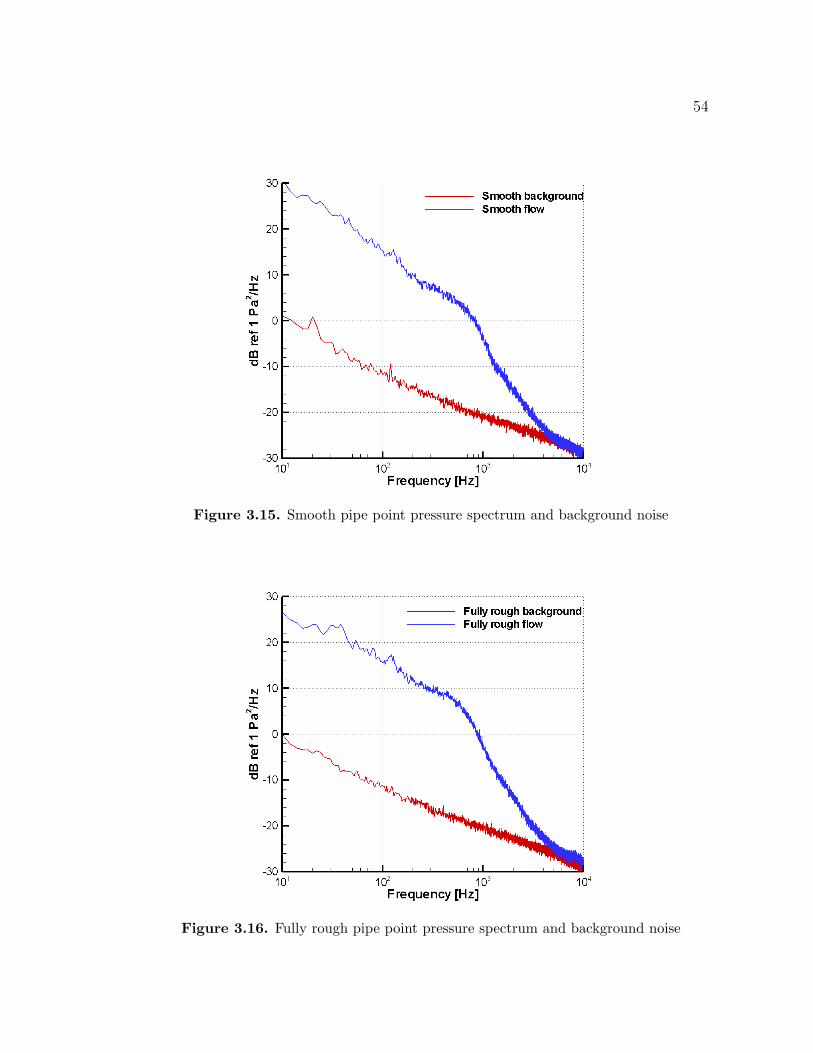
were used in the calculation of low-wavenumber pressures. The smooth wall point
pressure spectrum as measured by one hydrophone is shown in figure 3.14 along
with the point pressure spectrum of the 1987 Chase model [3], including the ef-
fects of transducer area averaging by Ko [5] and Lysak’s [21] decay due to viscous
effects. The measured point pressure spectrum matches the model well in the
mid-frequency range; high and low frequency ranges are limited by the noise floor
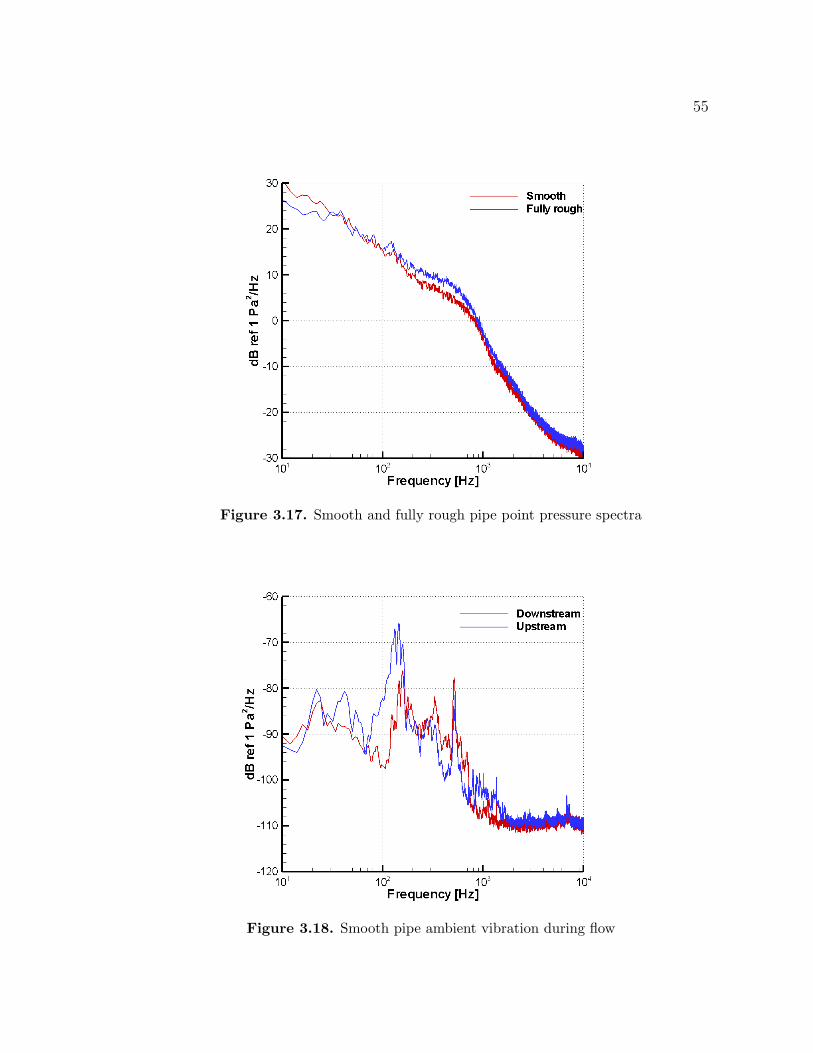
and by ambient vibration, respectively. The background noise during each of the
measurement periods is plotted along with the recorded spectra in figures 3.15 and
3.16. Figure 3.17 shows a comparison of the smooth and fully rough point pressure
spectra, where a slight increase in level is observed over the rough surface due to
increased turbulence production.
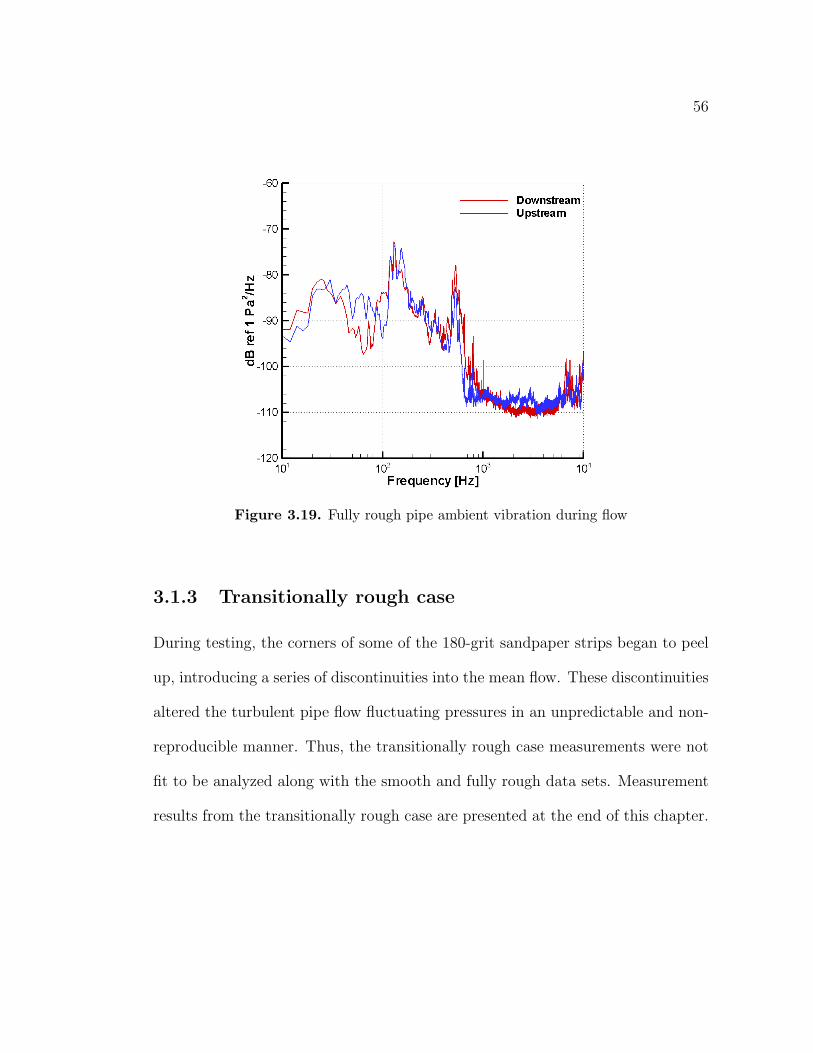
Ambient vibrational noise was measured by three upstream and three down-
stream accelerometers, attached to the structure supporting the test section and
oriented in each coordinate direction. Vibration measured perpendicular to the
floor, corresponding to an up and down translation of the system, is shown for the
smooth and fully rough cases in figures 3.18 and 3.19. The measured vibrational
noise displays an increase from about 100 - 600 Hz from an unknown source, to the
49
degree that some of the vibration data may have been contaminated. This increase
in ambient noise may have artificially raised the response of the cylinder at the
(2,1) and (3,1) modes, which could skew the final calculated pressure level. Those
data were ultimately omitted from calculations of the low-wavenumber spectrum.
Fre
quen
cy [H
z]
Time [s]
Smooth flow (color bar: dB ref. 1 m/s2/Hz)
5 10 15 200
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
−120
−100
−80
−60
−40
−20
0
Figure 3.6. Smooth pipe flow spectrogram
50
Fre
quen
cy [H
z]
Time [s]
Fully rough flow (color bar: dB ref. 1 m/s2/Hz)
5 10 15 200
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
−120
−100
−80
−60
−40
−20
0
Figure 3.7. Fully rough pipe flow spectrogram
Figure 3.8. Smooth pipe flow modal decomposition: ring 1
51
Figure 3.9. Smooth pipe flow modal decomposition: ring 2
Figure 3.10. Smooth pipe flow modal decomposition: ring 3
52
Figure 3.11. Fully rough pipe flow modal decomposition: ring 1
Figure 3.12. Fully rough pipe flow modal decomposition: ring 2
53
Figure 3.13. Fully rough pipe flow modal decomposition: ring 3
101 102 103 104−40
−30
−20
−10
0
10
20
30
40
Frequency [Hz]
dB r
e. 1
Pa2 /H
z
Chase modelHydraulically smooth
Figure 3.14. Smooth pipe point pressure spectrum and Chase model
54
Figure 3.15. Smooth pipe point pressure spectrum and background noise
Figure 3.16. Fully rough pipe point pressure spectrum and background noise
55
Figure 3.17. Smooth and fully rough pipe point pressure spectra
Figure 3.18. Smooth pipe ambient vibration during flow
56
Figure 3.19. Fully rough pipe ambient vibration during flow
3.1.3 Transitionally rough case
During testing, the corners of some of the 180-grit sandpaper strips began to peel
up, introducing a series of discontinuities into the mean flow. These discontinuities
altered the turbulent pipe flow fluctuating pressures in an unpredictable and non-
reproducible manner. Thus, the transitionally rough case measurements were not
fit to be analyzed along with the smooth and fully rough data sets. Measurement
results from the transitionally rough case are presented at the end of this chapter.
57
3.1.4 Modal analysis: hydraulically smooth and fully
rough
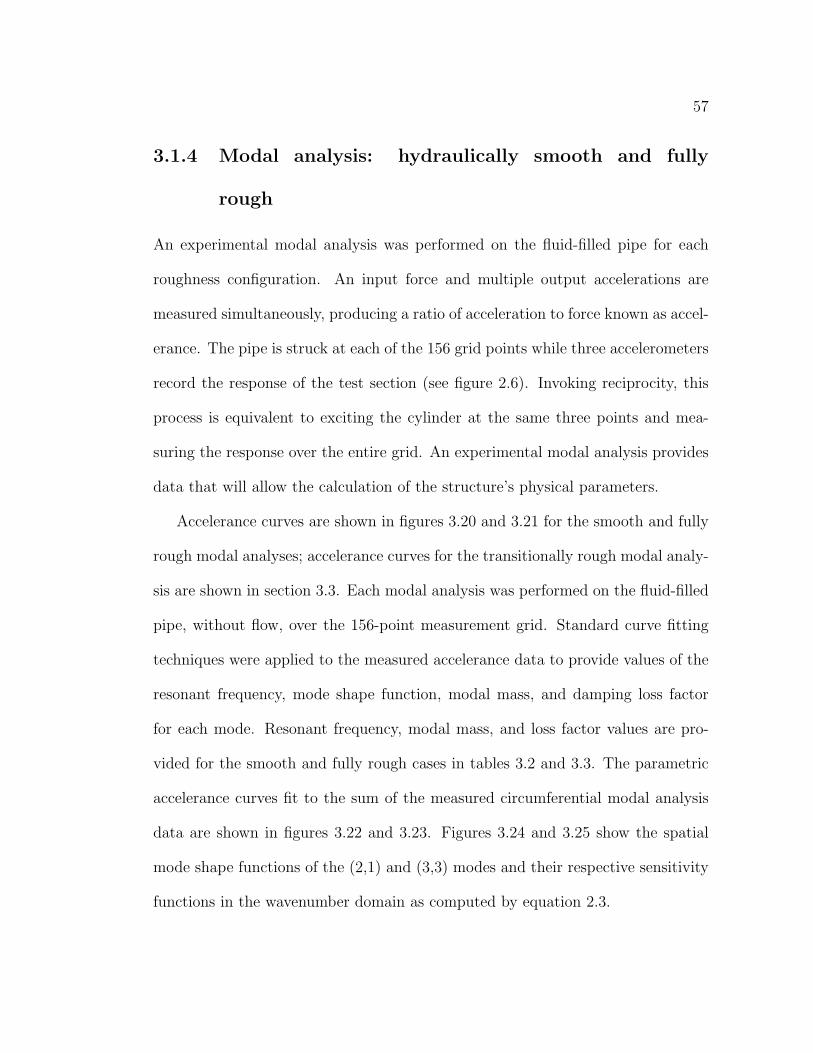
An experimental modal analysis was performed on the fluid-filled pipe for each
roughness configuration. An input force and multiple output accelerations are
measured simultaneously, producing a ratio of acceleration to force known as accel-
erance. The pipe is struck at each of the 156 grid points while three accelerometers
record the response of the test section (see figure 2.6). Invoking reciprocity, this
process is equivalent to exciting the cylinder at the same three points and mea-
suring the response over the entire grid. An experimental modal analysis provides
data that will allow the calculation of the structure’s physical parameters.
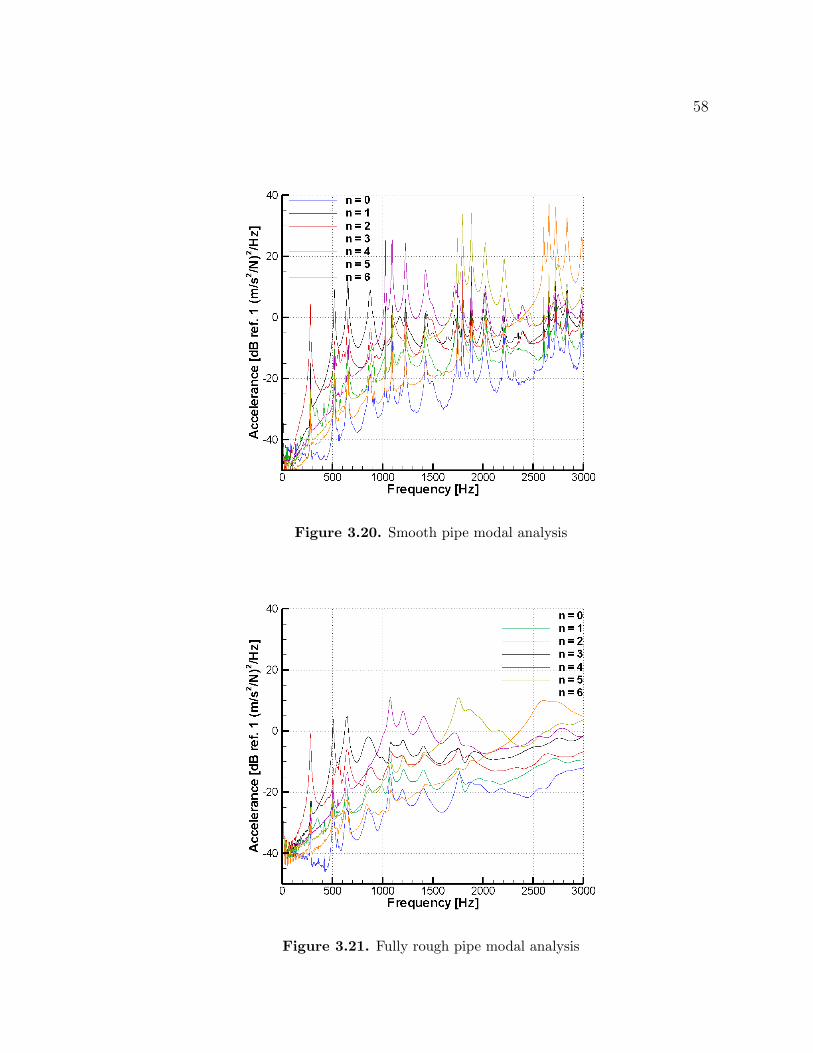
Accelerance curves are shown in figures 3.20 and 3.21 for the smooth and fully
rough modal analyses; accelerance curves for the transitionally rough modal analy-
sis are shown in section 3.3. Each modal analysis was performed on the fluid-filled
pipe, without flow, over the 156-point measurement grid. Standard curve fitting
techniques were applied to the measured accelerance data to provide values of the
resonant frequency, mode shape function, modal mass, and damping loss factor
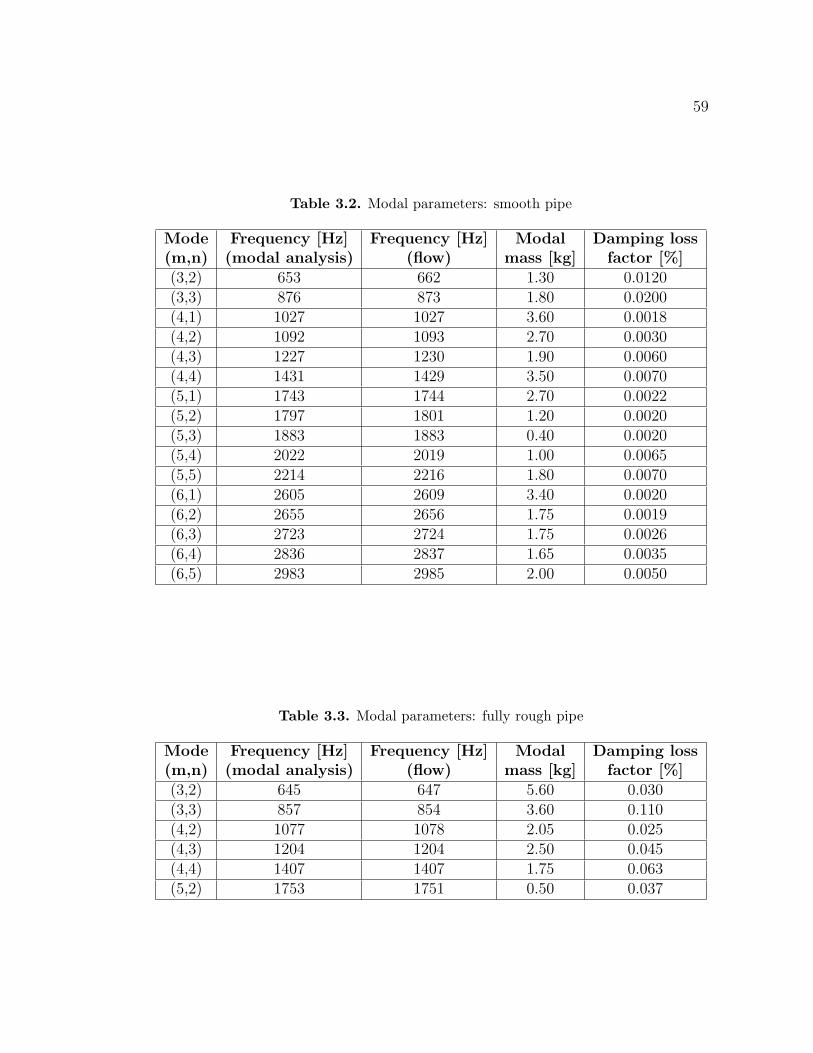
for each mode. Resonant frequency, modal mass, and loss factor values are pro-
vided for the smooth and fully rough cases in tables 3.2 and 3.3. The parametric
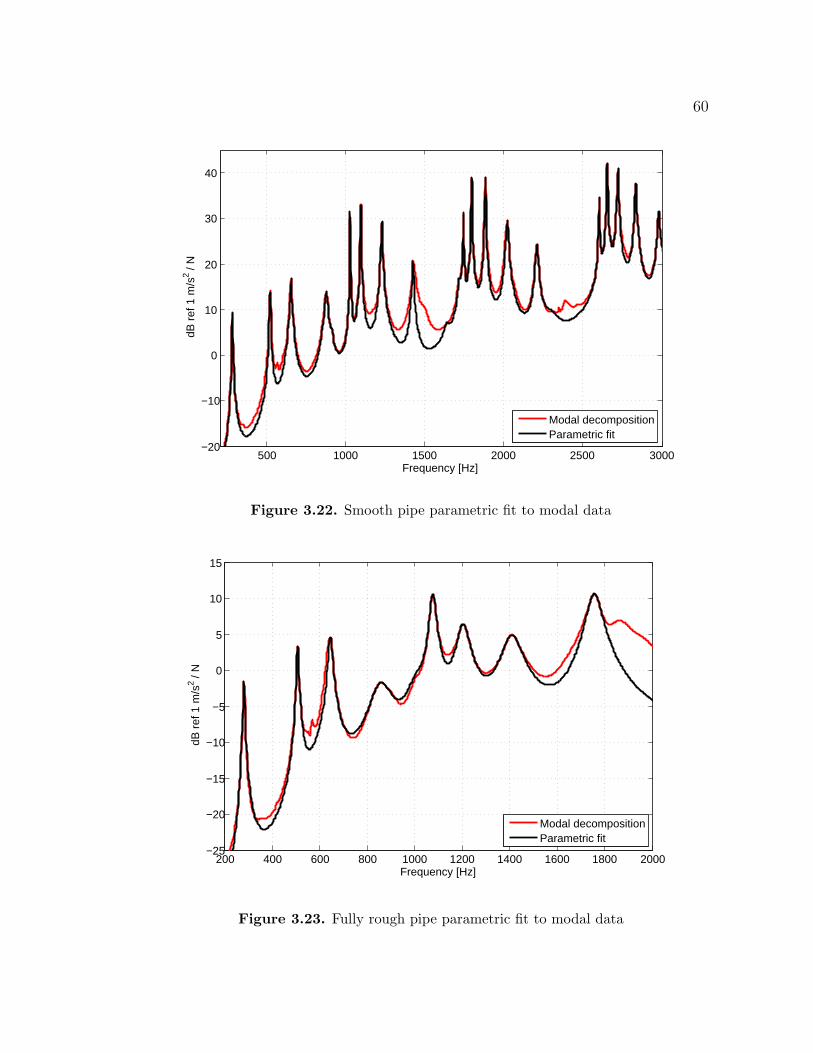
accelerance curves fit to the sum of the measured circumferential modal analysis
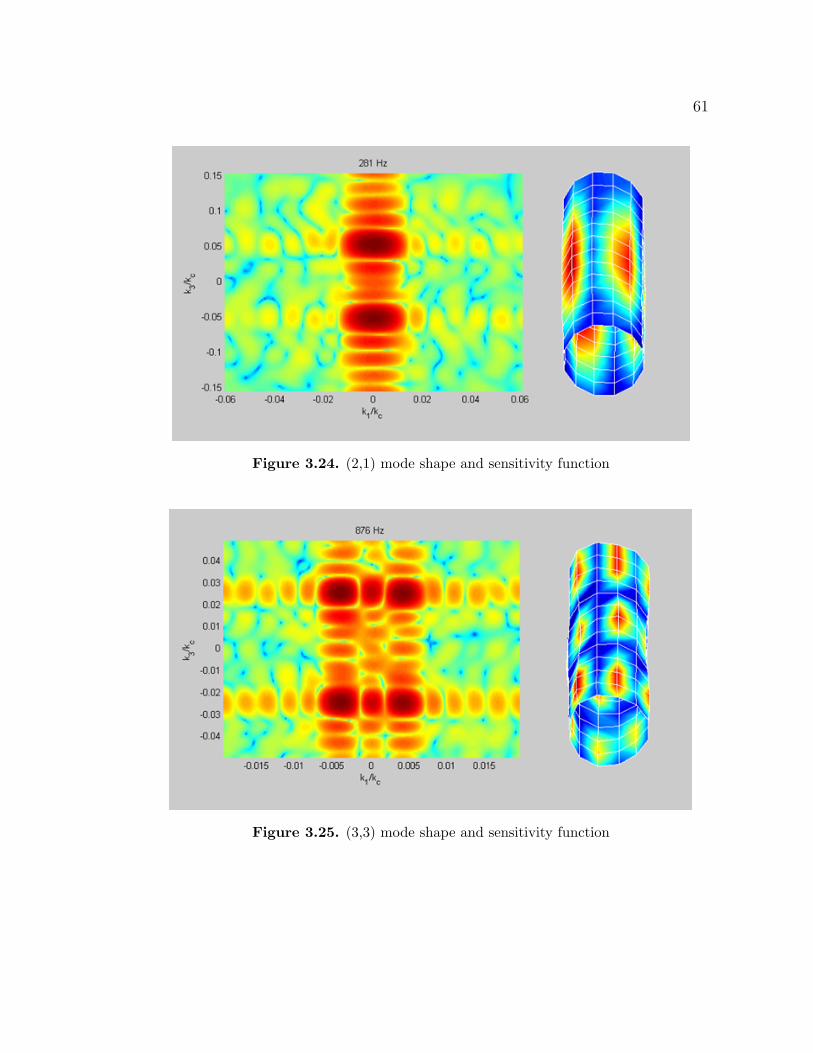
data are shown in figures 3.22 and 3.23. Figures 3.24 and 3.25 show the spatial
mode shape functions of the (2,1) and (3,3) modes and their respective sensitivity
functions in the wavenumber domain as computed by equation 2.3.
58
Figure 3.20. Smooth pipe modal analysis
Figure 3.21. Fully rough pipe modal analysis
59
Table 3.2. Modal parameters: smooth pipe
Mode Frequency [Hz] Frequency [Hz] Modal Damping loss(m,n) (modal analysis) (flow) mass [kg] factor [%](3,2) 653 662 1.30 0.0120(3,3) 876 873 1.80 0.0200(4,1) 1027 1027 3.60 0.0018(4,2) 1092 1093 2.70 0.0030(4,3) 1227 1230 1.90 0.0060(4,4) 1431 1429 3.50 0.0070(5,1) 1743 1744 2.70 0.0022(5,2) 1797 1801 1.20 0.0020(5,3) 1883 1883 0.40 0.0020(5,4) 2022 2019 1.00 0.0065(5,5) 2214 2216 1.80 0.0070(6,1) 2605 2609 3.40 0.0020(6,2) 2655 2656 1.75 0.0019(6,3) 2723 2724 1.75 0.0026(6,4) 2836 2837 1.65 0.0035(6,5) 2983 2985 2.00 0.0050
Table 3.3. Modal parameters: fully rough pipe
Mode Frequency [Hz] Frequency [Hz] Modal Damping loss(m,n) (modal analysis) (flow) mass [kg] factor [%](3,2) 645 647 5.60 0.030(3,3) 857 854 3.60 0.110(4,2) 1077 1078 2.05 0.025(4,3) 1204 1204 2.50 0.045(4,4) 1407 1407 1.75 0.063(5,2) 1753 1751 0.50 0.037
60
500 1000 1500 2000 2500 3000−20
−10
0
10
20
30
40
Frequency [Hz]
dB r
ef 1
m/s
2 / N
Modal decompositionParametric fit
Figure 3.22. Smooth pipe parametric fit to modal data
200 400 600 800 1000 1200 1400 1600 1800 2000−25
−20
−15
−10
−5
0
5
10
15
Frequency [Hz]
dB r
ef 1
m/s
2 / N
Modal decompositionParametric fit
Figure 3.23. Fully rough pipe parametric fit to modal data
61
Figure 3.24. (2,1) mode shape and sensitivity function
Figure 3.25. (3,3) mode shape and sensitivity function
62
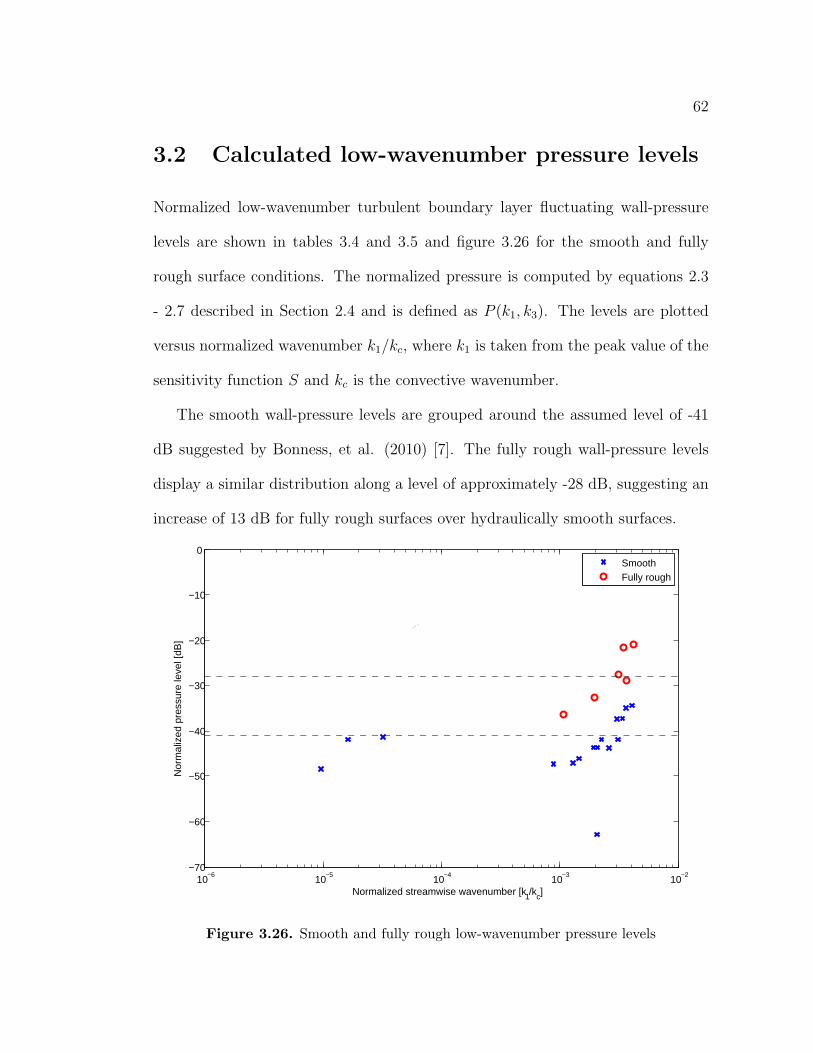
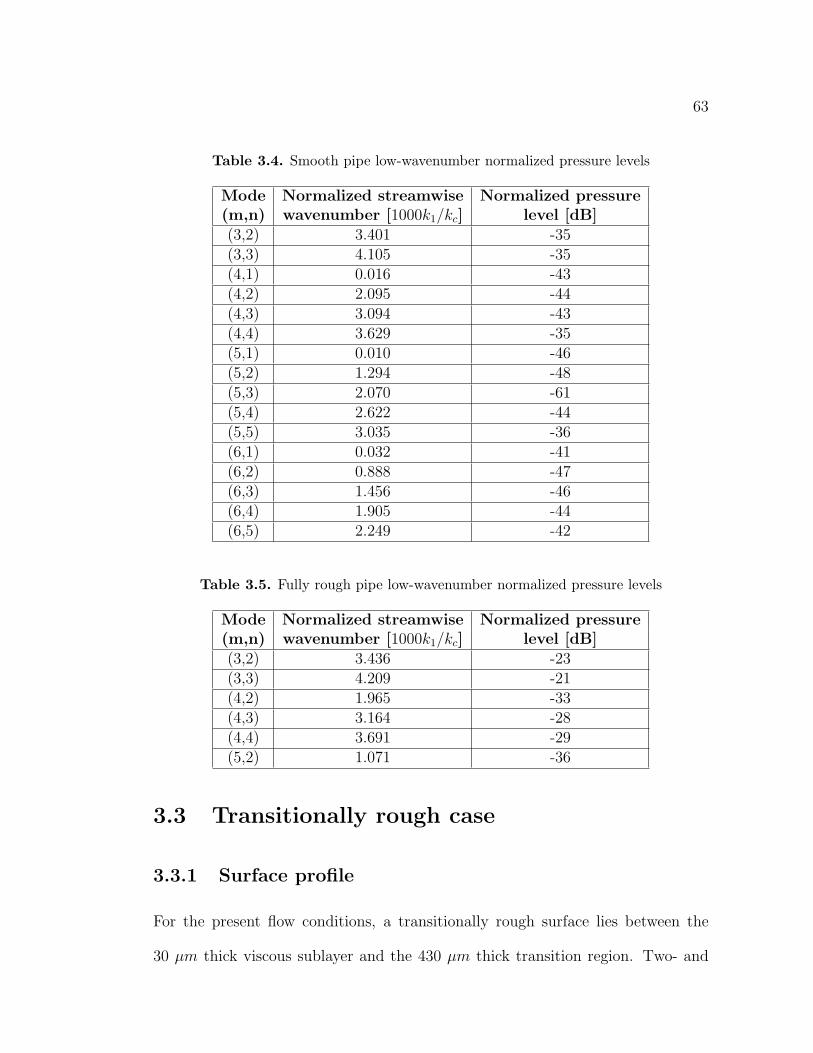
3.2 Calculated low-wavenumber pressure levels
Normalized low-wavenumber turbulent boundary layer fluctuating wall-pressure
levels are shown in tables 3.4 and 3.5 and figure 3.26 for the smooth and fully
rough surface conditions. The normalized pressure is computed by equations 2.3
- 2.7 described in Section 2.4 and is defined as P (k1, k3). The levels are plotted
versus normalized wavenumber k1/kc, where k1 is taken from the peak value of the
sensitivity function S and kc is the convective wavenumber.
The smooth wall-pressure levels are grouped around the assumed level of -41
dB suggested by Bonness, et al. (2010) [7]. The fully rough wall-pressure levels
display a similar distribution along a level of approximately -28 dB, suggesting an
increase of 13 dB for fully rough surfaces over hydraulically smooth surfaces.
10−6
10−5
10−4
10−3
10−2
−70
−60
−50
−40
−30
−20
−10
0
Normalized streamwise wavenumber [k1/kc]
Nor
mal
ized
pre
ssur
e le
vel [
dB]
SmoothFully rough
Figure 3.26. Smooth and fully rough low-wavenumber pressure levels
63
Table 3.4. Smooth pipe low-wavenumber normalized pressure levels
Mode Normalized streamwise Normalized pressure(m,n) wavenumber [1000k1/kc] level [dB](3,2) 3.401 -35(3,3) 4.105 -35(4,1) 0.016 -43(4,2) 2.095 -44(4,3) 3.094 -43(4,4) 3.629 -35(5,1) 0.010 -46(5,2) 1.294 -48(5,3) 2.070 -61(5,4) 2.622 -44(5,5) 3.035 -36(6,1) 0.032 -41(6,2) 0.888 -47(6,3) 1.456 -46(6,4) 1.905 -44(6,5) 2.249 -42
Table 3.5. Fully rough pipe low-wavenumber normalized pressure levels
Mode Normalized streamwise Normalized pressure(m,n) wavenumber [1000k1/kc] level [dB](3,2) 3.436 -23(3,3) 4.209 -21(4,2) 1.965 -33(4,3) 3.164 -28(4,4) 3.691 -29(5,2) 1.071 -36
3.3 Transitionally rough case
3.3.1 Surface profile
For the present flow conditions, a transitionally rough surface lies between the
30 µm thick viscous sublayer and the 430 µm thick transition region. Two- and
64
three-dimensional profiles of the 180-grit sandpaper used as a transitionally rough
surface are shown in figures 3.27 and 3.28. The spatial transform of this surface
is shown in figure 3.29 and its relative flatness indicates a uniform distribution of
roughness element sizes.
3.3.2 Flow and modal results
The average flow speed over the 20-second record was 5.99 m/s, with a maximum
of 6.10 m/s and a minimum of 5.87 m/s. A spectrogram of the transitionally rough
flow case produced from accelerometer 1 in ring 1 is shown in figure 3.30, where
an increase in overall noise is observed, as well as cavitation bursts in the high
frequency region.
The circumferential modal decomposition of the cylinder’s response to flow for
the transitional roughness condition is shown for each ring of accelerometers in fig-
ures 3.31 - 3.33. The point pressure spectrum and background noise recorded by
the downstream hydrophones are shown in figure 3.34. Figure 3.35 shows the accel-
erance response to the roving force hammer modal analysis of the fluid-filled pipe,
without flow. The contact cement used to install the sandpaper added significant
damping to the cylinder, and only a few lower-order modes are discernable.
Due to the addition of discontinuities in the flow much larger than the average
roughness height, the roughness condition cannot be taken as uniformly within
the transitional roughness range over the entire interior surface of the test section.
Thus, the turbulent boundary layer forcing function cannot be related to a uniform
distribution of roughness elements within this range.
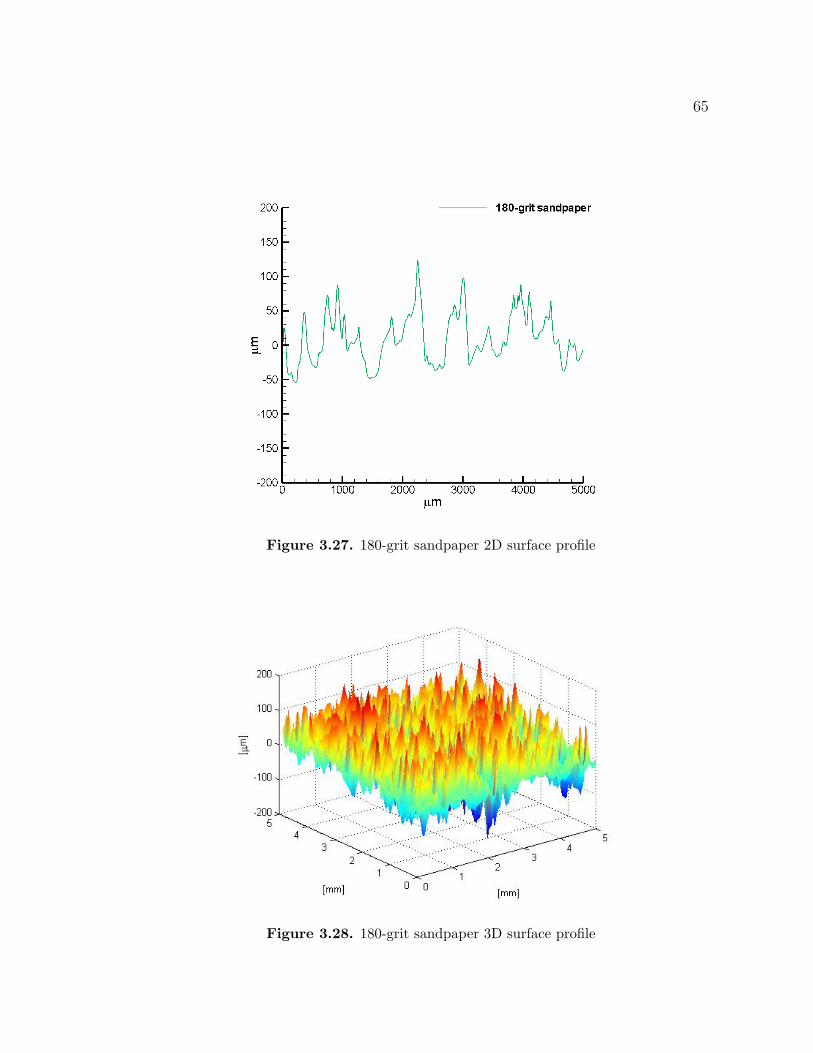
65
Figure 3.27. 180-grit sandpaper 2D surface profile
Figure 3.28. 180-grit sandpaper 3D surface profile
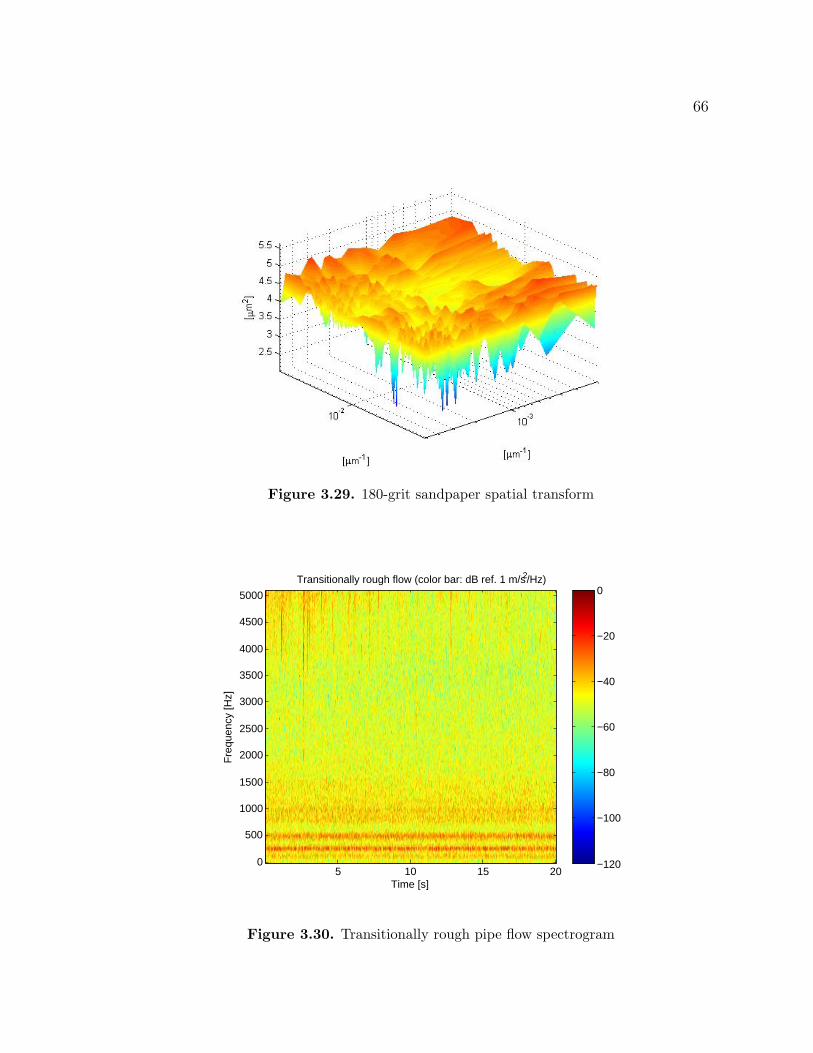
66
Figure 3.29. 180-grit sandpaper spatial transform
Fre
quen
cy [H
z]
Time [s]
Transitionally rough flow (color bar: dB ref. 1 m/s2/Hz)
5 10 15 200
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
−120
−100
−80
−60
−40
−20
0
Figure 3.30. Transitionally rough pipe flow spectrogram
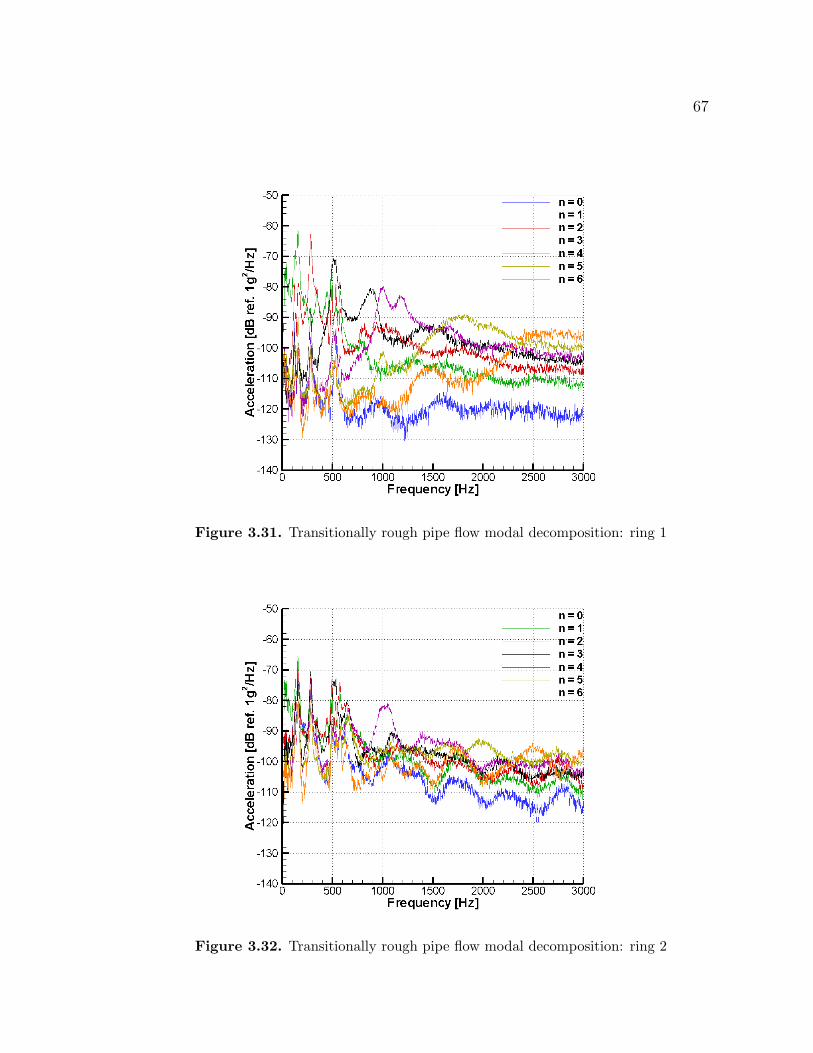
67
Figure 3.31. Transitionally rough pipe flow modal decomposition: ring 1
Figure 3.32. Transitionally rough pipe flow modal decomposition: ring 2
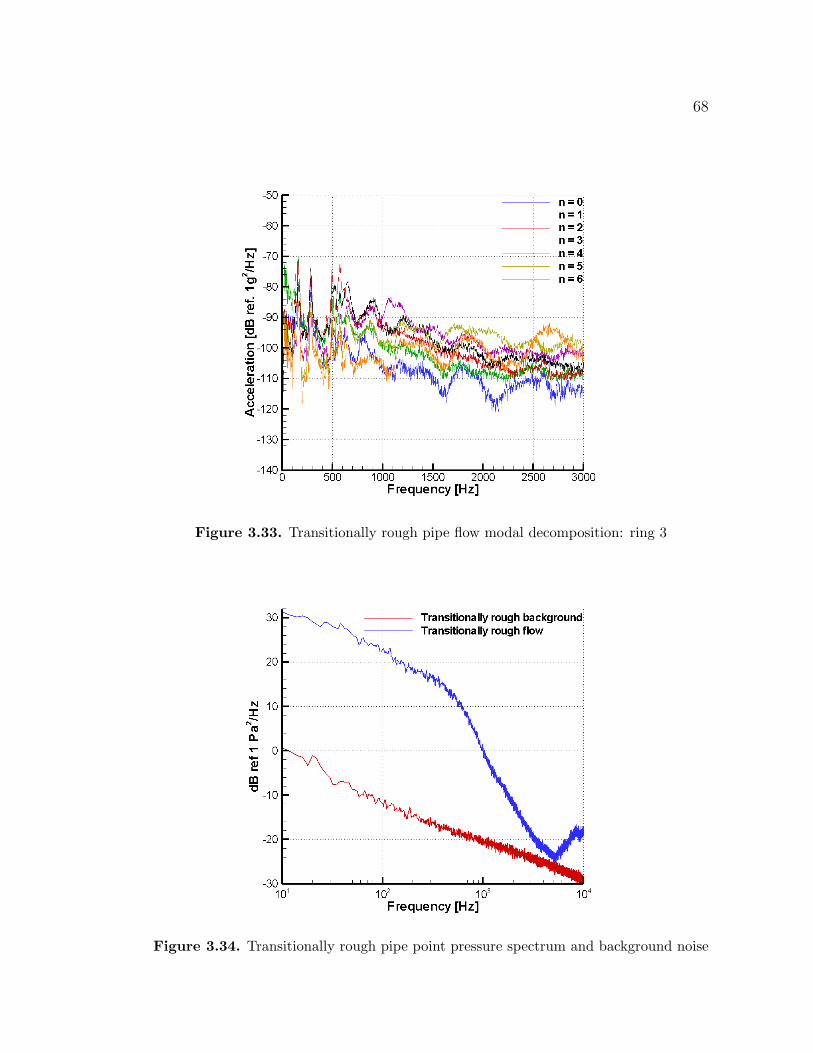
68
Figure 3.33. Transitionally rough pipe flow modal decomposition: ring 3
Figure 3.34. Transitionally rough pipe point pressure spectrum and background noise
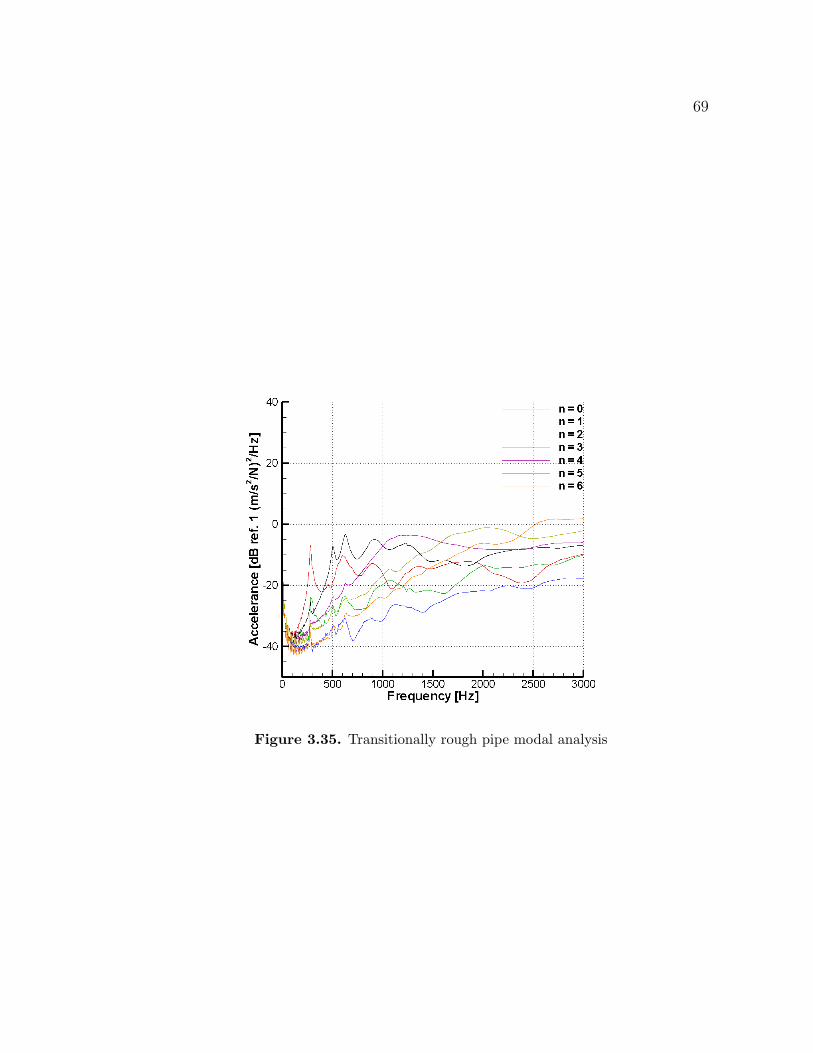
69
Figure 3.35. Transitionally rough pipe modal analysis
Chapter 4Conclusions
4.1 Discussion
Low-wavenumber turbulent boundary layer fluctuating wall-pressure levels have
been reported for flow over hydraulically smooth and fully rough surfaces. Smooth
wall low-wavenumber levels extracted from structural vibration measurements sug-
gest a normalized level of -41 dB. The measured point pressure spectrum for flow
over a smooth surface matches the 1987 Chase model [3] and low-wavenumber
levels compare well to those reported by Bonness, et al. (2010) [7]. The fully
rough surface condition displays a level of approximately -28 dB, suggesting a 13
dB increase for fully rough surfaces over hydraulically smooth surfaces. This is
consistent with the expected increase due to the scattering of convective pressures
to lower wavenumbers predicted by Howe [22], Smith, et al. [23], and Anderson,
et al. [24].
Static head was used as a low noise source of flow and a thin aluminum cylin-
drical shell was used as a wavevector filter. These experimental techniques enable
71
the measurement of the low-wavenumber region of the turbulent boundary layer
pressure spectrum which is otherwise difficult to extract due to masking by convec-
tive pressures. The experiment may have some limitations, however. The use of
a spatial filter is necessary in the extraction of low-wavenumber, long wavelength
pressures which are difficult to measure directly but couple well to structures. Us-
ing a structural wavevector filter provides pressure levels at a few discrete points,
related to structural resonances, and not as a continuous spectrum. Thus, the
actual form of the spectrum must be inferred from these observed discrete points.
As more data describing the low-wavenumber region come forth, the form of the
turbulent boundary layer pressure spectrum is pieced together and extended to
lower wavenumbers and additional surface conditions.
Even when care is taken, it is difficult to create a turbulent flow system without
any discontinuities or unintended surface roughness elements, both of which im-
pact the structure of the turbulent boundary layer and the pressures it produces.
For example, the interior surface of a wind tunnel or piping system may not be
uniformly hydraulically smooth, or pipe segments may not have perfectly flush
joints.
The use of static head to drive flow through the test apparatus decreases facility
noise considerably over a wind or water tunnel experiment, but background noise
from sources such as nearby road traffic and other facility operations is still present.
Low-wavenumber pressures by nature must be measured inversely and care must
be taken to minimize background noise. A valid experiment must optimize a given
scenario to ensure its validity.
Despite any inherent difficulties, the present experiment has provided measure-
72
ments of low-wavenumber pressure levels down to normalized streamwise wavenum-
bers k1/kc of the order 10−5 for smooth conditions and 10−3 for fully rough condi-
tions. These wavenumbers are lower than previously reported data for fully rough
conditions. The fully rough levels track the hydraulically smooth levels well, and
suggest a 13 dB correction factor.
4.2 Suggestions for future work
Future experiments may be implemented to quantify the low-wavenumber effects
of larger, discrete surface roughness elements and discontinuities, to augment the
study of uniformly distributed roughness elements investigated here. Measure-
ments of a transitionally rough surface could be revisited, which may show a spec-
tral level somewhere between hydraulically smooth and fully rough surfaces.
The addition of sandpaper and nonskid tape as forms of surface roughness
introduced damping into the system, and thus fewer modes were resolved for the
rough condition. It would be ideal if the damping were unchanged between the
smooth and rough conditions and a one to one comparison of every mode could be
made. Alternate methods of roughening the aluminum surface were investigated,
such as abrasing the surface or allowing it to corrode, however these methods did
not produce the desired degree of roughness and may not have been uniform over
the entire pipe interior. A future option for creating roughness that does not add
damping to the structure could involve machining a series of holes or grooves of
various sizes and depths into the surface.
The present data should be incorporated in the refinement of the low-
73
wavenumber region of turbulent boundary layer models, which were developed
before adequate low-wavenumber data were available and are primarily concerned
with smooth surfaces. Alternatively, a new model could be developed that accu-
rately reflects both the well-described convective region and the recently measured
low-wavenumber region. Until a full theory of turbulence is produced, parametric
models motivated by experiments will continue to prevail, and it is through the
incremental work of experimentalists that such knowledge of the structure of the
turbulent boundary layer will be advanced.
Bibliography
[1] Skudrzyk, E. J. and G. P. Haddle (1958) “Noise production in a turbu-lent boundary layer by smooth and rough surfaces,” Journal of the AcousticalSociety of America, 32(1), pp. 19–34.
[2] Corcos, G. M. (1963) “Resolution of pressure in turbulence,” Journal ofthe Acoustical Society of America, 35(2), pp. 192–199.
[3] Chase, D. M. (1987) “The character of the turbulent wall pressure at sub-convective wavenumbers and a suggested comprehensive model,” Journal ofSound and Vibration, 112(1), pp. 125–147.
[4] Smol’yakov, A. V. (2000) “Calculation of the spectra of pseudosound wall-pressure fluctuations in turbulent boundary layers,” Acoustical Physics, 46(3),pp. 401–407.
[5] Ko, S. H. (1993) “Performance of various shapes of hydrophones in the re-duction of turbulent flow noise,” Journal of the Acoustical Society of America,93(3), pp. 1041–1047.
[6] Bull, M. K. (1967) “Wall-pressure fluctuations associated with subsonicturbulent boundary layer flow,” Journal of Fluid Mechanics, 28(4), pp. 719–754.
[7] Bonness, W. K., D. E. Capone, and S. A. Hambric (2010) “Low-wavenumber turbulent boundary layer wall-pressure measurements from vi-bration data on a cylinder in pipe flow,” Journal of Sound and Vibration,329, pp. 4166–4180.
[8] Fox, R. W., A. T. McDonald, and P. J. Pritchard (2004) Introductionto Fluid Mechanics, ‘Wiley’.
[9] Schlichting, H. (1987) Boundary Layer Theory, 7th ed., ‘McGraw-Hill’.
75
[10] Kirsten, H. (1927) Experimentelle untersuchungen der entwicklungder geschwindigkeitsverteilung der turbulenten rohrstromung, Ph.D. thesis,Leipzig.
[11] Nikuradse, J. (1932) “Gesetzmassigkeit der turbulenten stromung in glattenrohren,” Forschg. Arb. Ing.-Wes., (356).
[12] Farabee, T. M. and F. E. Geib Jr. (1991) “Measurements of boundarylayer pressure fluctuations at low wavenumbers on smooth and rough walls,”Flow Noise Modeling, Measurement, and Control, 11(H00713).
[13] Blake, W. K. (1970) “Turbulent boundary-layer wall-pressure fluctuationson smooth and rough walls,” Journal of Fluid Mechanics, 44(4), pp. 637–659.
[14] Willmarth, W. W. and C. E. Woolridge (1962) “Measurements of thefluctuating pressure at the wall beneath a thick turbulent boundary layer,”Journal of Fluid Mechanics, 14(2), pp. 187–210.
[15] Maidanik, G. and T. Eisler (1982) “Reasons and means for measuringthe spectral density of the pressure in a subsonic turbulent boundary layer,”Journal of Sound and Vibration, 84(3), pp. 397–416.
[16] Martin, N. C. and P. Leehey (1977) “Low wavenumber wall pressuremeasurements using a rectangular membrane as a spatial filter,” Journal ofSound and Vibration, 52(1), pp. 95–120.
[17] Panton, R. L., A. L. Goldman, R. L. Lowery, and M. M. Reis-chman (1980) “Low-frequency pressure fluctuations in axisymmetric turbu-lent boundary layers,” Journal of Fluid Mechanics, 97(2), pp. 299–319.
[18] Farabee, T. M. and F. E. Geib Jr. (1975) “Measurement of boundarylayer pressure fields with an array of pressure transducers in subsonic flow,”ICIASF ’75 Record, pp. 311–319.
[19] Chase, D. M. (1980) “Modeling the wavevector-frequency spectrum of tur-bulent boundary layer wall pressure,” Journal of Sound and Vibration, 70(1),pp. 29–67.
[20] Howe, M. S. (1979) “The role of surface shear stress fluctuations in thegeneration of boundary layer noise,” Journal of Sound and Vibration, 65(2),pp. 159–164.
[21] Lysak, P. D. (2006) “Modeling the wall pressure spectrum in turbulent pipeflows,” Transactions of the ASME, 128, pp. 216–222.
76
[22] Howe, M. S. (1991) “Surface pressures and sound produced by turbulent flowover smooth and rough walls,” Journal of the Acoustical Society of America,90(2), pp. 1041–1047.
[23] Smith, B. S., W. N. Alexander, W. Devenport, S. A. L. Glegg,and D. L. Grissom (May 2008) “The relationship between roughness noiseand the near-field pressure spectrum (AIAA paper no. 2008-2904),” 14thAIAA/CEAS Aeroacoustics Conference (29th AIAA Aeroacoustics Confer-ence), Vancouver, British Columbia Canada.
[24] Anderson, J. M., D. O. Stewart, and W. K. Blake (November 2009)“Experimental investigations of sound from flow over rough surfaces,” Pro-ceedings of the ASME 2009 International Mechanical Engineering Congressand Exposition, Lake Buena Vista, Florida, USA.
[25] Glegg, S. and W. Devenport (2009) “The far-field sound from rough-wallboundary layers,” Proceedings of the Royal Society, 465, pp. 1717–1734.
[26] Antonia, R. A. and R. E. Luxton (1971) “The response of a turbu-lent boundary layer to a step change in surface roughness Part 1. Smooth torough,” Journal of Fluid Mechanics, 48(4), pp. 721–761.
[27] Antonia, R. A. and R. Luxton (1971) “The response of a turbulent bound-ary layer to an upstanding step change in surface roughness,” Transaction ofthe ASME, pp. 22–32.
[28] Cheng, H. and I. P. Castro (2002) “Near-wall flow development aftera step change in surface roughness,” Boundary-Layer Meteorology, 105, pp.411–432.
[29] Laws, E. M. (1990) “Flow conditioning - a new development,” Flow Mea-surement Instrumentation, 1, pp. 165–170.
[30] Hwang, Y. F. and G. Maidanik (1990) “A wavenumber analysis of thecoupling of a structural mode and flow turbulence,” Journal of Sound andVibration, 142(1), pp. 135–152.
[31] Ewins, D. J. (1984) Modal Testing: Theory and Practice, ‘Research StudiesPress Ltd.’.
[32] Bonness, W. K. (2009) Low wavenumber turbulent boundary layer wall pres-sure and shear stress measurements from vibration data on a cylinder in pipeflow, Ph.D. thesis, The Pennsylvania State University, State College, Penn-sylvania.

77
[33] Gabrielson, T. (2010), “Course Notes: ACS 516, Acoustical Data Mea-surement and Analysis,” The Pennsylvania State University.
[34] Bendat, J. S. and A. G. Piersol (1986) Random Data Analysis and Mea-surement Procedures, ‘Wiley-Interscience’.
[35] Cengel, Y. A. and J. M. Cimbala (2006) Fluid Mechanics: Fundamentalsand applications, ‘McGraw-Hill’.