Embed Size (px)
Citation preview

Global Journal of Pure and Applied Mathematics.ISSN 0973-1768 Volume 12, Number 3 (2016), pp. 1921-1945© Research India Publicationshttp://www.ripublication.com/gjpam.htm
The K-Exponential Matrix to solve systems ofdifferential equations deformed
Ruthber Rodríguez Serrezuela
Faculty of Biomedical,Electronic and Mechatronics Engineering,
Universidad Antonio Nariño,
Osmin Ferrer Villar
Faculty of Education,Program of Math, Universidad de Sucre,
Sincelejo, Republic of Colombia.
Jorge Ramirez Zarta
Faculty of Engineering,Corporación Universitaria del Huila, CORHUILA,
Yefrén Hernández Cuenca
Neiva, Republic of Colombia.
Abstract
With this work we introduce exponential matrix notions and deformed logarithms,wherof we realize a complete study of their properties with a deformation generatorintroduced by G. Kaniadakis 1. Furthermore, we establish deformed differentialequations and some of their solution techniques, which permit to solve commonphysical problems which are modeled with the mentioned equations. We show anapplication of K-differential equations to a physical application of basic engineer-ing demonstrating its effectiveness for engineering calculations.
AMS subject classification:Keywords:

1922 Ruthber Rodríguez Serrezuela et al.
1. Introduction
In this article we define the k-exponential matrix and the k-logarithmic matrix of a squarematrix A, which we will denote expk (A), and lnk (A) respectively. Additionally, we willpresent some convergence properties and criteria for the same matrices [1], [2]. In the firstpart we will discuss the deformation generator according to G. Kaniadakis, some aspectsof deformed k-algebra and properties of the k-exponential and k-logarithmic functions[3], [4], [5]. In the second part we will define the k-exponential and k-logarithmic matri-ces of an A-square matrix by using their performances in a series of convergent matrices.Finally, in the last part, we define the k-differential equations, understood as differentialequations with kaniadakis deviations and k-deformation parameters. Also, we presentsome techniques for solving k-differential equations and k-differential equation systems,where the k-exponential matrix forms part of the solutions for some of these systems.
2. Deformed mathematics after Kaniadakis
Deformation Generator
In [1] a real g function is defined, which depends on k ∈ R parameter. A deformationgenerator has to show the following properties:
i) g(x) ∈ C∞(R)
ii) g(−x) = −g(x)
iii)d
dxg(x) > 0
iv) g(±∞) = ±∞v) g(x) ≈ x when x → 0.
G. Kaniadiakis [1] defines the real function as xk = 1
karcsenhg(kx) and its inverse
xk = 1
kg−1 (sinh(kx)) which complies with the following:
i) xk ∈ C∞(R)
ii) (−x)k = −xk
iii)d
dxxk > 0
iv) (±∞)k = ±∞v) x−k = xk
vi) xk ≈ x when k → 0(x0 = x)
vii) xk ≈ x when k → 0(0k = 0).

The K-Exponential Matrix to solve systems of differential equations 1923
Deformed K-Algebra
In [15] the construction of a deformed algebra and calculus to solve problems outlinedthermostatic not extended. Similarly, in [1] the k-sum is defined which generalizes thesum of real numbers by means of
xk⊕ y = (xk + yk)
k = 1
kg−1[senh[arcsenh(g(kx)) + arcsenh(g(ky))] (2.1)
The following formulas are k− sum properties as demonstrated by [1] and [3].
i) (xk⊕ y) = xk + yk
ii) x0⊕ y = x + y
iii) xk⊕ y = y
k⊕ x
iv) (xk⊕ y)
k⊕ z = xk⊕ (y
k⊕ z)
v) xk⊕ 0 = x
vi) xk⊕ (−k) = (−x)
k⊕ x = 0
Remark 2.1. The xk⊕ (−y) is written as x
k� y and it is called k-difference.
The k−product is also introduced in the following way:
xk⊗ y = (xk · yk)
k = 1
kg−1(senh[arcsenh(g(kx)) · arcsenh(g(ky))]) (2.2)
The following properties relate k-sum and k-product, [1]:
i) x0⊗ y = xy
ii) (xk⊗ y)
k⊗ z = xk⊗ (y
k⊗ z)
iii) zk⊗ (x
k⊕ y) = (zk⊗ x)
k⊕ (zk⊗ y)
iv) (R − {0}, k⊗) is an abelian group [4].
v) I = 1k is such as xk⊗ I = x.
vi) x =(
1
xk
)k
appears like in xk⊗ x = x
k⊗ x = I

1924 Ruthber Rodríguez Serrezuela et al.
vii) xk� y = x
k⊗ y = xk⊗
(1
yk
)k
.
In [6] the exponential deformed k-function or k-exponential is defined as
expk(x) = exp
(1
karcsenh(kx)
)= (
√1 + k2x2 + kx)1/k (2.3)
with 0 < k < 1 [13].The expk(x) function consists of real numbers, is part of the C∞(R) classification,
is strictly growing and obeys the exponential rules when k → 0. Furthermore, the k-derivation and the usual derivation show the following properties:
i) limx→−∞(expk(x)) = 0
ii) limx→∞(expk(x)) = ∞
iii)d
dx(expx(x)) = 1√
1 + k2x2expk(x) [14],
iv)∫
expk(x)dx =(
k2x − √1 + x2k2
k2 − 1
)expk(x) + C
v) exp−k(x) = expk(x)
vi) expk(x)expk(−x) = 1
vii) (expk(x))r = expk/r(rx), (r = 0)
viii) expk(0) = 1
ix) expk(x)expk(y) = expk(xk⊕ y)
x) expk(x)/expk(y) = expk(xk� y).
The inverse k-exponential function equals the k-logarithmic function, denoted as lnk(x),
defined in real positive numbers and for k = 0 it behaves as ln0(x) = lnx. When k = 0it is defined as,
lnk(x) = 1
ksenh(klnx) = xk − x−k
2k(2.4)
The lnk(x) function [2] belongs to the C∞(R+) class is strictly growing, concave and
adheres to:
i) limx→0+(lnk(x)) = −∞

The K-Exponential Matrix to solve systems of differential equations 1925
ii) limx→∞(lnk(x)) = ∞
iii) lnk(1) = 0
iv) ln−k(x) = lnk(x)
v) lnk(1
x) = −lnk(x) [14],
vi) lnk(xr) = rlnrk(x); with r ∈ R
vii) lnk(xy) = lnk(x)k⊕ lnk(y)
viii) lnk(x/y) = lnk(x)k� lnk(y)
ix)d
dtlnk(tb) = 1
t
(ln2k(tb)
lnk(tb)
)
x)∫
lnk(tb)dt = t
1 − k2
(lnk(tb) − ln2k(tb)
lnk(tb)
).
Returning to the k-exponential [7], one can use the Taylor expansion series for exp(·)and proceed with x0 = 0, which is given by:
expk(x) =∞∑
n=0
an(k)xn
n! , k2x2 < 1 (2.5)
where the coefficients an are defined by a0(k) = a1(k) = 1 and
a2m(k) =m−1∏j=0
[1 − (2j)2k2]; a2m+1(k) =m∏
j=1
[1 − (2j − 1)2k2] (2.6)
It is important to note that an(0) = 1 and an(−k) = an(k). According to [5], the Taylorexpansion of lnk(1 + x) [7] converges if −1 < x ≤ 1 and if it has the following form:
lnk(1 + x) =∞∑
n=1
bn(k)(−1)n−1 xn
n(2.7)
with bn(k) = 1, bn(0) = 1 bn(−k) = bn(k). for n > 1
bn(k) = 1
2(1 − k)
(1 − k
2
)· · ·
(1 − k
n − 1
)+ 1
2(1 + k)
(1 + k
2
)· · ·
(1 + k
n − 1
)(2.8)

1926 Ruthber Rodríguez Serrezuela et al.
3. K-Exponential matrix
In this part we explain how the definition of the k-exponential matrix behaves whenjoined with an A-square matrix, denoted as expk(A), as an extension of the executionof a series of k-exponential matrix, in such a way that when k −→ 0 then the usualexponential function of a matrix is obtained [10]. Moreover, some important propertiesof an k-exponential matrix are verified.
Theorem 3.1. The matrix series∞∑
p=0
ap(k)
p! Ap converges if ‖A‖ <1
|k| with ap(K) as
in (2.6).
Proof. Note that∞∑
p=0
∥∥∥∥ap(k)
p! Ap
∥∥∥∥ =∞∑
p=0
∣∣∣∣ap(k)
p!∣∣∣∣ ‖Ap‖ ≤
∞∑p=0
∣∣∣∣ap(k)
p!∣∣∣∣ ‖A‖p.
Effectivley,
∞∑p=0
∣∣∣∣ap(k)
p!∣∣∣∣ ‖A‖p =
∞∑m=0
∣∣∣∣a2m(k)
2m!∣∣∣∣ ‖A‖2m +
∞∑n=1
∣∣∣∣ a2n+1(k)
(2n + 1)!∣∣∣∣ ‖A‖2n+1
∣∣∣∣bm+1
bm
∣∣∣∣ =
∣∣∣∣∣∣∣∣a2m+2(k)‖A‖2m‖A‖2
(2m + 2)(2m + 1)(2m)!a2m(k)‖A‖2m
(2m)!
∣∣∣∣∣∣∣∣=
∣∣∣∣∣ a2m+2(k)‖A‖2
(2m + 1)(2m + 2)a2m(k)
∣∣∣∣∣=
∣∣∣∣∣ [1 − (2m)2k2]‖A‖2
(2m + 2)(2m + 1)
∣∣∣∣∣Then,
limm→∞
∣∣∣∣bm+1
bm
∣∣∣∣ = limm→∞
( [1 − (2m)2k2](2m + 2)(2m + 1)
‖A‖2)
= limm→∞
[1
(2m)2 − k2]
(1 + 2
2m
) (1 + 1
2m
)‖A‖2
= | − k2|‖A‖2
Therefore, the series is convergent, when k2‖A‖2 < 1, which is the same as ‖A‖ <1
|k| .
Similarly, it shows that the series∞∑
n=1
∣∣∣∣ a2n+1(k)
(2n + 1)!∣∣∣∣ ‖A‖2n+1 is convergent [11]. �

The K-Exponential Matrix to solve systems of differential equations 1927
Definition 3.2. [k-Exponential of a matrix] Given a matrix A ∈ Cn×n, with ‖A‖ <1
|k| ,we will define the k-exponential expk(A) as the matrix n × n given by the convergentseries:
expk(A) :=∞∑
p=0
ap(k)
p! Ap with ap(k) as in (2.6) (3.9)
Note that A is a nilpotent matrix, therefore, expk(A) is a finite series and, consequently,convergent.
Proposition 3.3. If O = [0] ∈ Cn×n is the zero matrix, than expk(O) = In.
Proof.
expk(O) = In + O
1! + a2(k)
2! O2 + a3(k)
3! O3 + · · · = In where k2‖O‖ = 0 < 1
�
Proposition 3.4. When D ∈ Cn×n is a diagonal matrix, D = diag{d1, . . . , dn} with
|di | <1
|k| , for i = 1, 2, 3, . . . , n so that, expk(D) converges to diag{expk(d1), . . . ,
expk(dn)}.Proof.
expk(D) = In + D + a2(k)
2! D2 + a3(k)
3! D3 + · · ·
=
1 + d1 + a2(k)d21/2! + · · · 0
. . .
0 1 + dn + a2(k)d2n/2! + · · ·
=expk(d1) 0
. . .
0 expk(dn)
= diag {expk(d1), . . . , expk(dn)} with |di | <
1
|k| ,
f or i = 1, 2, 3, . . . , n
�
Proposition 3.5.
d
dt[expk(tB)] = B
∞∑
p=0
ap+1(k)
p! (tB)p
.

1928 Ruthber Rodríguez Serrezuela et al.
Proof. This time b(m)ij shall be the element i, j of (tB)m, therefore the element i, j of
(tB)m
m! istm
m!b(m)ij , consequently,
d
dt
[1 + tb
(1)ij + a2(k)
2! t2b(2)ij + a3(k)
3! t3b(3)ij + · · ·
]=
∞∑
p=0
ap+1(k)
p! tpbp+1ij
then,
d
dt[expk(tB)] =
∞∑p=0
ap+1(k)
p! tpBp+1 = B
∞∑p=0
ap+1(k)
p! (tB)p
�
Proposition 3.6. For D = diag{d1, d2, . . . , dn} the derivative of the k-exponentialmatrix expk(tD) is given by:
d
dt[expk(tD)] = D
1√1 + (ktd1)2
0
. . .
01√
1 + (ktdn)2
expk(tD) (3.10)
Proof.
d
dt(expk(tD)) = D
∞∑
p=0
ap+1(k)
p! (tD)p
= D
∞∑p=0
ap+1(k)
p! (td1)p 0
. . .
0∞∑
p=0
ap+1(k)
p! (tdn)p
= D
1√1 + (ktd1)2
expk(td1) 0
. . .
01√
1 + (ktdn)2expk(tdn)
= D · diag
(1√
1 + (ktdi)2
)· expk(tD)

The K-Exponential Matrix to solve systems of differential equations 1929
�
When k → 0, one obtains,
d
dt(exp(tD)) = D exp(tD).
Proposition 3.7. For a diagonalizable matrix B = SDS−1 we obtainexpk = S [expk(D)] S−1.
Proof.
expk(B) =∞∑
p=0
ap(k)
p! Bp =∞∑
p=0
ap(k)
p!(SDS−1)
= S
∞∑
p=0
ap(k)D
p!
S−1
= S expk(D) S−1
�
And also
d
dt[expk(tB)] = d
dt[S (expk(tD)) S−1]
= SD · diag
(1√
1 + (ktdi)2
)· expk(tD)
Proposition 3.8.
∫expk(tB)dt = B−1
∞∑p=1
ap−1
p! (tB)p + C
where B and C are matrices with the size of n × n.
Proof.
∫expk(tB)dt =
∫ ∞∑
p=0
ap(k)
p! (tB)p
dt
=∫ ∞∑
p=0
ap(k)
p! (t)pBpdt (3.11)

1930 Ruthber Rodríguez Serrezuela et al.
one element (i,j) out of (3.11) has the following form,
∫ [1 + tb
(1)ij + a2(k)
2! t2b(2)ij + a3(k)
3! t3b(3)ij + · · ·
]dt
=[t + t2
2b
(1)ij + a2(k)
2!t3
3b
(2)ij + a3(k)
3!t4
4b
(3)ij + ... + Cij
]=
∞∑p=1
ap−1 tp
p! b(p−1)
ij
Consequently,
∫expk(tB)dt =
∞∑p=1
ap−1(k)tp
p! Bp−1 + C
= B−1∞∑
p=1
ap−1
p! (tB)p + C
�
Then, for a matrix D = diag{d1, . . . , dn} one obtains,
∫expk(tD)dt = D−1
k2t2d21 −
√1 + k2t2d2
1
k2 − 10
. . .
0k2t2d2
n − √1 + k2t2d2
n
k2 − 1
expk(tD) + C
When k → 0 one obtains∫
exp(tD)dt = D−1exp(tD) + C.
4. K-Logarithmic matrix
Through the series performance of the deformed k-logarithms we define a square matrixA as the logarithmic matrix and we call it lnk(A). Also, we define some properties ofthe logarithmic k-matrix which reduce the usual properties of logarithmic performanceof a square matrix.
Proposition 4.1. The matrix series
∞∑p=1
bp(k)(−1)p−1
p(A − In)
p
is convergent when ‖A − In‖ < 1. where bp(K) as in (2.8).

The K-Exponential Matrix to solve systems of differential equations 1931
Proof.
∞∑p=1
∥∥∥∥bp(k)(−1)p−1
p(A − In)
n
∥∥∥∥ ≤∞∑
p=1
bp(k)
p‖A − In‖p
Given
ap = bp(k)
p‖A − In‖p,
then:
∣∣∣∣ap+1
ap
∣∣∣∣ =∣∣∣∣∣ pbp+1(k)‖A − In‖p+1
(p + 1)bp(k)‖A − In‖p
∣∣∣∣∣=
∣∣∣∣ pbp+1(k)
(p + 1)bp(k)
∣∣∣∣ ‖A − In‖
When p −→ ∞,
(1 ± k
p
)−→ 1, if bp+1(k) = b−
p+1(k) + b+p+1(k), with,
b−p+1(k) = 1
2(1 − k) · · ·
(1 − k
p
)
and
b+p+1(k) = 1
2(1 + k) · · ·
(1 + k
p
).
Furthermore,
limp→∞
(b−
p+1
b−p
)= lim
p→∞ (1 − k/p) = 1
y limp→∞
(b+
p+1
b+p
)
= limp→∞ (1 + k/p) = 1,
therefore
limp→∞
(b−
p+1 + b+p+1
b−p + b+
p
)
= b−p + b+
p
b−p + b+
p
= 1,

1932 Ruthber Rodríguez Serrezuela et al.
then
limp→∞
∣∣∣∣ap+1
ap
∣∣∣∣= ‖A − In‖
Consequently, the series∞∑
p=1
bp(k)
p(A − In)
p
converges when ‖A − In‖ < 1. �
Definition 4.2. [k-logarithms of a matrix] Given a matrix A ∈ Mn×n(C), with ‖A −In‖ < 1. We define the k-logarithms of a lnk(A) matrix as the n × n matrix given by theconvergent series:
lnk(A) :=∞∑
p=1
bp(k)(−1)p−1
p(A − In)
p, for n − 1 < ‖A‖ < n + 1
Proposition 4.3. Proves that lnk(In) = 0, where 0 is the zero matrix with the size ofn × n.
Proof.
lnk(In) =∞∑
p=1
bp(k)(−1)p−1
p(In − In)
p
=∞∑
p=1
bp(k)(−1)p−1
p(0)p = 0
�
Proposition 4.4. When D is a diagonal matrix D = diag{d1, d2, . . . , dn} then lnk(D) =diag{lnk(d1), . . . , lnk(dn)}.Proof.
lnk(D) =∞∑
p=1
bn(k)(−1)p−1
pAp
with
Ap =(d1 − 1)p 0
. . .
0 (dn − 1)p

The K-Exponential Matrix to solve systems of differential equations 1933
one element (i, j) of∞∑
p=1
bn(k)(−1)p−1
pAp
has the form ∞∑p=1
bp(k)(−1)p−1
p(di − 1)p for i = j
and “0” for i = j .Then
∞∑p=1
bp(k)(−1)p−1
p(di − 1)p = lnk(1 + (di − 1)) = lnk(di).
�
Proposition 4.5. For a diagonal matrix D = diag(d1, . . . , dn) one obtainsln(expk(tD)) = tD.
Proof.
lnk(expk(tD)) = lnk(diag(expk(td1), . . . , expk(tdn)))
= diag(lnk(expk(td1)), . . . , lnk(expk(tdn))) = tD.
�
Proposition 4.6. For a diagonizable matrix A = RDR−1 with D = diag{λ1,
λ2, . . . , λn}, we conclude that lnk(A) is convergent when 0 < λi ≤ 2, where λi arevalues belonging to A.
Proof.
A − In = RDR−1 − In = RDR−1 − RR−1 = R(D − In)R−1
= R diag{λ1 − 1, . . . , λn − 1}R−1
Then
lnk(A) =∞∑
p=1
bp(k)(−1)p−1
p[R(D − In)R
−1]p
= R
∞∑
p=1
bp(k)(−1)p−1
p(D − In)
pR−1
The element (i, i) of∞∑
p=1
bp(k)(−1)p−1
p(D − In)
p

1934 Ruthber Rodríguez Serrezuela et al.
is ∞∑p=1
bp(k)(−1)p−1
p(λi − 1)p = lnk(λi) (4.12)
Then
lnk(A) = R
lnk(λ1) 0
. . .
0 lnk(λn)
R−1.
It is converged when 0 < λi ≤ 2, through (2.7). �
Proposition 4.7.d
dtlnk(tD) = 1
tlnk(lD) (lnk(tD))−1 .
Proof.
d
dtlnk(tD) = d
dt
∞∑
p=1
bp(k)(−1)p−1
p(tD − In)
p
=
d
dtlnk(tλ1) 0
. . .
0d
dtlnk(tλn)
=
1
tln2k(tλ1)(lnk(tλ1))
−1 0
. . .
01
tln2k(tλn)(lnk(tλn))
−1
= 1
tln2k(tD)(lnk(tD))−1.
�
Remark 4.8. For a matrix B = RDR−1 applies
d
dtlnk(tB) = R
1
tln2k(tD) (lnk(tD))−1 R−1.
It is important to note that when k → 0, we obtain
d
dtln(tB) = 1
tR ln(tD)(ln(tD))−1R−1 = 1
tIn.

The K-Exponential Matrix to solve systems of differential equations 1935
Proposition 4.9. To obtain a diagonalizable matrixB = RDR−1 = R diag{λ1, . . . , λn}R−1, we have to∫
lnk(tB)dt = R
(t
1 − k2lnk(tD) − 1
1 − k2ln2k(tD)(lnk(tD))−1 + C
)R−1
Proof.∫lnk(tB)dt = R
(∫lnk(tD)dt
)R−1
= Rdiag
(1
1 − k2(lnk(tλi) − ln2k(tλi)(lnk(tλi))
−1) + Ci
)R−1
= R
(t
1 − k2lnk(tD) − 1
1 − k2ln2k(tD)(lnk(tD))−1 + C
)R−1
Then k → 0 ∫ln(tB)dt = R (tln(tD) − tIn + C) R−1
= tRln(tD)R−1 − tIn + CR
when CR = RCR−1. �
5. K-Differential equations
We consider two algebraic structures (X,k⊕, ·) and (Y, +, ·) and the complex of the F
functions: F : {f : X → Y } with f ⊆ C∞(R). Kanadianis [8] defines the differential
dkx as: dkx = limz→x
xk� z where dkx = dxk. Moreover, he defines the k-deviation of the
f -function as:
f ′k = df (x)
dkx= lim
z→x
f (x) − f (z)
xk� z
= df (x)
dxk
= df (x)
dxk
=(
1
dxk/dx
)(df (x)
dx
)
=√
1 + k2x2 d
dxf (x)
with x, z ∈ R y f (x), f (z) ∈ R. When k → 0, the k-deviation is reduced to the usualderivation.

1936 Ruthber Rodríguez Serrezuela et al.
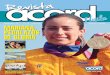
Figure 1: K-derivation concept
According to figure 1, one can observe that the k−derivation as defined by G Kani-adakis is interpreted as the reason for change between the image variations of a function.Recognizing the image variations of the xk deformator we see that when x tends to a x0
AN
BF=
(AN
AD
)(AD
BF
)=
(�f/�x
�xk/�x
)= df (x0)/dx
d(x0)k/dx
=(
1
d(x0)k/dx
)(df (x0)
dx
)= df (x0)
dkx
Proposition 5.1. The k-derivation in point x0 is the inclination of a hyperbola tangentin point x0 given by the equation
y = f ′k(x0)(x
k� x0) + f (x0).
Proof.
y = f ′k(x0)(x
k� x0) + f (x0) = f ′k(x0)(x
√1 + k2x2
0 − x0
√1 + k2x2) + f (x0)
(5.13)
If we express (5.13) through the formula Ax2 + Bxy + Cy2 + Dx + Ey + F = 0. Wehave to
A = (f ′k(x0))
2; B = −2f ′k(x0)
√1 + k2x2
0;C = 1; D = 2f ′
k(x0)f (x0)
√1 + k2x2
0;E = −2f (x0); F = (f (x0))
2 − x20(f ′
k(x0))2.

The K-Exponential Matrix to solve systems of differential equations 1937
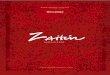
Figure 2: Hyperbola tangent of the function f (x) = x2 in point x0 = 2.
WithB2 − 4AC = 4k2x2
0
(f ′
k(x0))2 ≥ 0.
Consequently, it is verified that y = g(x) is the straight tangent to the curve y = f (x)
when k = 0 and it is the hyperbola for para k = 0. Moreover,i.)
g(x0) = f ′k(x0)
(x0
√1 + k2x2
0 − x0
√1 + k2x2
)+f (x0) = f ′(x0)(0)+f (x0) = f (x0)
ii)
g′(x) = f ′k(x0)
(√1 + k2x2
0 − x0xk2
√1 + k2x2
)
= f ′k(x0)
√1 + k2x2
0
√1 + k2x2
0 − x0x0k2√
1 + k2x20
= f ′k(x0)
1√1 + k2x2
0
= 1√1 + k2x2
0
·√
1 + k2x20f ′(x0) = f ′(x0).
In figure 2 the function f (x) = x2 is visualized, which is the tangent to the hyperbolag(x) and the point x0 = 2 for the k-values between (−1, 1) . �
Proposition 5.2. When f, g ∈ F, B ∈ R then apply

1938 Ruthber Rodríguez Serrezuela et al.
i)d
dkx(f + g) = d
dkxf + d
dkxg
ii)d
dkx(f · g) = g
(d
dkxf
)+ f
(d
dkxg
)
iii)d
dkx[f (g(x))] = 1
dkx/dx
(d
dxf (g(x)) · d
dx(g(x))
)
Definition 5.3. When f ∈ F where F : {f : X → Y } with f ⊆ C∞(R), then∫k
f (x)dkx =∫
dxk
dxf (x)dx =
∫1√
1 + k2x2f (x)dx,
[13] with∫
0f (x)dkx =
∫f (x)dx.
Definition 5.4. A k-differential equation is an expression of the form
E
(k, x, y, y′
k, y′′k , . . . , y
(n)k
)= 0 a represents deformations of a usual differential equa-
tion, in such a way that when k → 0, both, the usual differential equation and its solution,reduce.
For example in a k-differential equation y′′k − 2y′
k + (1 − k2)y = 0 it can be verifiedthat one solution is y = xex
k and when k → 0 y′′k − 2y′
k + (1 − k2)y = 0 which isreduced to y′′
k − 2y′k + y = 0 and y = xex
k which is reduced to y = xex. Where y = xex
is solution of y′′ − 2y′ + y = 0.
Proposition 5.5. A separable k-differential equation has the following formdy
dkx=
f (x) · g(y) and a solution is given by∫ (1
g(y)
)dy =
∫1√
1 + k2x2f (x)dx.
Remark 5.6. The k-exponential is invariant to the k-derivation, which is effective for
dy
dkx= y∫
1
ydy =
∫1√
1 + k2x2dx
=∫
1√1 + k2x2
dx
= 1
k
∫d(kx)√
1 + (kx)2
= 1
kln |secθ + tanθ | + C

The K-Exponential Matrix to solve systems of differential equations 1939
when kx = tanθ , then
ln(y) = ln
∣∣∣(√1 + k2x2 + kx)1/k∣∣∣ + C1
and accordingly
y = ec1(√
1 + k2x2 + kx)1/k = C2expk(x)
when k → 0dy
dx= y it results in y = Cex.
Proposition 5.7. A linear K-diferential equation with constant coefficients has the formdy
dkx= ay + f (x) and its general solution is
y = Cexpk/a(ax) + expk/a(ax)
∫k
f (s)(exp−k/a(−as)
)dks.
Proof. For f (x) = 0 we obtaindy
dkx= ay with a general solution y = C2expk/a(ax).
When C2 = v(x) then y = v(x) expk/a(ax) then
dy
dkx=
(dv(x)
dkx
) (expk/a(ax)
) + v(x)d
dkxexpk/a(ax).
butd
dkx(expk/a(ax)) =
√1 + k2x2 d
dx(expk(x))a = a(expk/a(ax)).
Therefore,
dy
dk(x)=
√1 + k2x2v′(x)
(expk/a(ax)
) + av(x)(expk/a(ax)
)(5.14)
Replacing (5.14) in the linear k-diferential equation with constant coeficients we obtain,√1 + k2x2v′(x)expk/a(ax) + av(x)(expk/a(ax)) = av(x)expk/a(ax) + f (x),
wherefrom
v(x) =∫
k
f (x)(exp−k/a(−ax)
)dkx.
Consequently, the general solution ofdy
dkx= ay + f (x) is
y = Cexpk/a(ax) + expk/a(ax)
∫k
f (s)(exp−k/a(−as)
)dks (5.15)
It is observed that when k → 0, the k-differential equation is reduced tody
dx= ay+f (x)
and its respective solution is y = Cexp(ax) + exp(ax)
∫f (y)(exp(−ay))dy. �

1940 Ruthber Rodríguez Serrezuela et al.
6. K-Differential equation systems
Definition 6.1. Given A ∈ Cn×n as a constant matrix e Y as a matrix function with in
order to n × n the k-differential matrix equationdY
dkt= AY denominates a homogeneous
linear with constant coefficients.
Proposition 6.2. When given D = diag{λ1, λ2, . . . , λn}, the matrix function is
Y =C1expk/λ1(λ1t) 0
. . .
0 Cnexpk/λn(λnt)
which is the solution of the k-differential systemdY
dkt= DY.
Proof.
dY
dkt= d
dkt
C1expk/λ1(λ1t) 0
. . .
0 Cnexpk/λn(λnt)
=
d
dktC1expk/λ1(λ1t) 0
. . .
0d
dktCnexpk/λn
(λnt)
=λ1 0
. . .
0 λn)
C1expk/λ1(λ1t) 0
. . .
0 Cnexpk/λn(λnt)
= DY
�
Proposition 6.3.
dY
dkt= d
dkt
Y11 · · · Y1n...
. . ....
Yn1 · · · Ynn
=
d1 · · · 0...
. . ....
0 · · · dn
Y11 · · · Y1n...
. . ....
Yn1 · · · Ynn
= DY

The K-Exponential Matrix to solve systems of differential equations 1941
obtains as solution
Y =
C11expk/d1(d1t). . . · · · C1nexpk/d1(d1t)
... Cij expk/di(dit)
...
Cn1expk/dn(dnt) · · · . . . Cnnexpk/dn
(dnt)
=n∑
i=1
0 · · · 0...
Cii · · · Cin
...
0 · · · 0
expk/di
(dit) (6.16)
Remark 6.4.
i) If D = In, then Y (t) = Cexpk(tIn).
ii) When k → 0, thendY
dt= DY obtains as solution Y = Cexp(tD).
Proposition 6.5. Given A = PDP −1 as a diagonalizable matrix, YA = PY(t)P −1 is
the solution of the k-differential equationdY (t)
dkt= AY(t).
Proof.d
dktYA(t) = P
d
dkt(Y (t))P −1 = PDY(t)p−1,
but, A = PDP −1 implies AP = PD, thend
dktYA(t) = APY(t)P −1 = AYA(t). �
Proposition 6.6. When A is a diagonalizable matrix where A = PDP −1 with D =diag(λ1, · · · , λn) then YA = PY(t)P −1 with Y ′
k(t) = DY is solution of Y ′k(t) = AY ,
with Y (t) as in (6.16).
Proof.
d
dktYA = d
dkt(PY (t)P −1) = PY ′
k(t)P−1 = PDY(t)P −1
= APY(t)P −1 = AYA(t)
�
Remark 6.7.
i) When D = In, YA = Pexpk(tIn)P−1 = expk(tA)
ii) When k → 0, YA = Pexp(tD)P −1 = exp(tA) is solution ofdY (t)
dkt= AY

1942 Ruthber Rodríguez Serrezuela et al.
Proposition 6.8. The k-differential linear systemdY
dkt= AY + F(t), where F(t) =
diag (fi(t)) obtains as a general solution
Y (t) = YA(t)C + YA(t)
∫k
Y−1A (s)F (s)dks.
Remark 6.9.
i) when D = In then Y = etAk C + etA
k
∫k
e−SAk F (S)dS
ii) when k → 0; Y = etAC + etA
∫e−SAF (S)dS is solution of
dY
dt= AY + F(t).
Proposition 6.10. The system
Y ′k(t) =
a11 0 · · · 0a21 0 · · · 0...
.... . .
...
am 0 · · · 0
Y11 · · · Y1n
...
Yn1 · · · Ynn
=
a11Y11 a11Y12 · · · a11Y1n
a22Y11 a21Y12 · · · a21Y1n
......
. . ....
an1Y11 an1Y12 · · · an1Ynn
obtains as solution
Y (t) =
C11 · · · C1na21
a11C11 · · · a21
a11C1n
.... . .
...an1
a11C11 · · · an1
a11C1n
expk/a(11)
(a11t).
Physical applications
A relativistic linear movement of a mass particle m0 at rest is moving with a speed of −→vtowards a reference system S
−→P = m0
−→v√1 − v2
c2
= m−→v
where m = m0√1 − v2/c2
.
a particular mass of, γ = 1√1 − v2/c2
defines the Lorentz factor [9], [14].
The relativistic moment is −→P = m−→v γ.

The K-Exponential Matrix to solve systems of differential equations 1943
It is known that the relativistic force F exerted on a particle with the moment P is definedas:
−→F = d
−→P
dt= d(γm0
−→v )
dt
= d
dt
[m0v√
1 − v2/c2
]
= d
dt
[m0v(1 − v2/c2)−1/2]
It is to be proven that the relativistic force according to Kaniadakis is:
−→F k =
√1 + k2t2
[m0
(1 − k2v2)3/2
dv
dt
]Effectively,
d−→P
dt= d
dt
[m0v(1 − v2/c2)−1/2]
= m0dv
dt(1 − v2/c2)−1/2 + m0v
(−1
2
)(1 − v2/c2)−3/2
(−2v
c2
)dv
dt
= m0dv/dt√1 − v2/c2
+ m0dv/dt
(1 − v2/c2)3/2
v
c2
= m0dvdt√
1 − v2/c2[1+
v2/c2
1 − v2/c2
]if k = 1
c
= m0dvdt√
1 − k2v2
[1 + k2v2
1 − k2v2
]
= m0dvdt√
1 − k2v2
[1
1 − k2v2
]
= m0dvdt
(1 − k2v2)3/2
then
−→F k =
√1 + k2t2 d
−→P
dt
=√
1 + k2t2
[m0
dvdt
(1 − k2v2)3/2
]
−→F k =
√1 + k2t2
(m0
(1 − k2v2)3/2
dv
dt
)

1944 Ruthber Rodríguez Serrezuela et al.
like
P(v1)
m1
k� P(v2)
m2= P(v1
k� v2)
m1
moreover, the kaniadrik hyperbolization is supposed to be expressed through the follow-ing form
h(x) = f ′k(x0)(x
k� x0) + f (x0).
Resolving the k-differential through this expression, the following result is obtained:
xk� x0 = h(x) − f (x0)
f ′k(x0)
.
For the case of the relativistic linear moment P1 and P2 we obtain
P(v1)
m1
k� P(v2)
m2= h(P (v1)/m1) − f (P2(v2)/m2)
f ′k(P2(v2)/m2)
= P(v1c� v2)
m1
for the identic function f (x) = x we have to:
fk(x0) =√
1 + k2x20f ′(x0) =
√1 + k2x2
0 .
Then
h(P (v1)/m1) − P2(v2)/m2√1 + k2(P2(v2)/m2)2
= h(P (v1)/m1) − P2(v2)/m2√1 + k2(v2/1 − k2v2
2
= h(P (v1)/m1) − P2(v2)/m2√1/1 − k2v2
2
=√
1 − k2v22
(h
(p(v1)
m1
)− p(v2)
m2
)
=√
1 − k2v22
(h
(p(v1)
m1
)−
√1 − k2v2
2p(v2)
m2
)
×√
1 − k2v22
h
(p(v1)
m1
)− v2 = P(v1
c� v1)
m1
The author(s) declare(s) that there is no conflict of interest regarding the publication ofthis article.

The K-Exponential Matrix to solve systems of differential equations 1945
References
[1] G. Kaniadakis, Statistical mechanics in the context of special relativity II. PhysicalReview E 72(3), 036108, 2005.
[2] Santos, A. P., Silva, R., Alcaniz, J. S., and Anselmo, D. H., Kaniadakis statisticsand the quantum H-theorem, Physics Letters A, 375(3), 352–355, 2011.
[3] Dora Esther Dcossa Casas, About exponential and logarithmic functions are de-formed according Kaniadakis, EAFIT University master’s thesis. Pág. 8–9, 2011.
[4] Scarfone, A. M., Entropic forms and related algebras, Entropy, 15(2), 624–649,2015.
[5] I.S. Gradshteyn and I.M. Ryzhil, Table of Integrals, Series and Product, AcademicPress, London, 2000.
[6] Kaniadakis, G., Non-linear kinetics underlying generalized statistics, Physica A:Statistical Mechanics and its Applications, 296(3), 405–425, 2001.
[7] Clementi, F., Gallegati, M., and Kaniadakis, G., A I-generalized statistical me-chanics approach to income analysis, Journal of Statistical Mechanics: Theoryand Experiment, 2009(02), P02037, 2009.
[8] Kaniadakis, G., and Scarfone, A. M., A new one-parameter deformation of theexponential function, PhysicaA: Statistical Mechanics and itsApplications, 305(1),69–75, 2002.
[9] Abe, S., and Okamoto, Y., Nonextensive statistical mechanics and its applications,Springer Science and Business Media., vol. 2001.
[10] Call, G. S., and Velleman, D. J., Pascal’s matrices, American MathematicalMonthly, 372–376, 1993.
[11] Eliasson, L. H., Absolutely convergent series expansions for quasi periodic motions,Stockholms Universitet. Matematiska Institutionen, 1998.
[12] Borges, E. P., A possible deformed algebra and calculus inspired in nonextensivethermostatistics, Physica A: Statistical Mechanics and its Applications, 340(1),95–101, 2004.
[13] Kaniadakis, G., Theoretical foundations and mathematical formalism of the power-law tailed statistical distributions, Entropy, 15(10), 3983–4010, 2013.
[14] Naudts, J., Deformed exponentials and logarithms in generalized thermostatistics,Physica A: Statistical Mechanics and its Applications, 316(1), 323–334, 2002.
[15] Abe, S., A note on the q-deformation-theoretic aspect of the generalized entropiesin nonextensive physics, Physics Letters A, 224(6), 326–330, 1997.
[16] Borges, E. P., A possible deformed algebra and calculus inspired in nonextensivethermostatistics, Physica A: Statistical Mechanics and its Applications, 340(1),95–101, 2004.
[17] Umarov, S., Tsallis, C., and Steinberg, S., On a q-central limit theorem consistentwith nonextensive statistical mechanics, Milan journal of mathematics, 76(1), 307–328, 2008.