1 I.T.I. : MECANICA IDepartamento: INGENIERA MECNICA, ENERGTICA
Y DE MATERIALES
TEMA N 15: DINMICA CINTICA DEL PUNTO
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
IndicePunto 15.1 Introduccin
Punto 15.2 Ecuaciones del movimiento15.2.1 Segunda Ley de
Newton15.2.2 Ecuaciones del movimiento de un punto15.2.3 Ecuaciones
del movimiento de un sistema de puntos
Punto 15.3 Movimiento rectilneoPuntos 13.3.1 a 13.3.6 Conocidas
x(t), v(t), a(t), a(x), a(v) y a = cte13.3.7 Anlisis grfico
Punto 15.4 Movimiento curvilneoPunto 15.4.1 Movimiento curvilneo
planoPunto 15.4.2 Movimiento curvilneo en el espacio
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
15.1 IntroduccinCuando la resultante del sistema de fuerzas que
se ejerce sobre un cuerpo puntual es nula, el cuerpo est en
equilibrio (reposo o velocidad constante). Cuando dicha resultante
no es nula, el cuerpo se halla animado de movimiento acelerado.Las
fuerzas no equilibradas y los movimientos que originan constituyen
la cintica, tema a tratar en los dos captulos que quedan por
impartir en este curso.El movimiento que experimenta un cuerpo
cuando est sometido a un sistema de fuerzas no equilibrado se puede
establecer utilizando tres mtodos diferentes:1.- Mtodo de fuerza,
masa y aceleracin.2.- Mtodo de trabajo y energa.3.- Mtodo de
impulso y cantidad de movimiento.El mtodo ms til para la resolucin
de un problema particular depende de la naturaleza del sistema de
fuerzas (constantes o variables) y de la informacin que se busca
(reacciones, velocidades, aceleraciones, etc.).En este curso
nicamente se va a desarrollar el primero de los tres mtodos, no
porque no sean interesantes los otros dos, sino porque el primero
de ellos es el ms utilizado y por la falta de tiempo para explicar
adecuadamente todos ellos.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
15.2 Ecuaciones del movimientoAntiguamente se crea que un cuerpo
en reposo estaba en su estado natural, por lo que para mantenerlo
en movimiento era necesaria una cierta fuerza. La gran contribucin
de Newton a la Mecnica fue darse cuenta de que no era necesaria una
fuerza para mantener en movimiento un cuerpo una vez que se hubiera
puesto en movimiento y que el efecto de una fuerza es alterar una
velocidad, no mantenerla.15.2.1 Segunda ley de NewtonLa primera ley
de Newton atae a un punto material en reposo o que se mueva con
velocidad constante y la tercera ley de Newton rige la accin y
reaccin entre cuerpos que interactan. Ambas se han utilizado para
desarrollar los conceptos de Esttica.La segunda ley de Newton para
el movimiento, que relaciona el movimiento acelerado de un punto
material con las fuerzas que originan el movimiento, constituye la
base de los estudios de Dinmica.La primera ley de Newton constituye
un caso particular de la segunda. Cuando la fuerza resultante es
nula (R = 0), la aceleracin del punto es nula (a = 0); por lo que
el punto estar en reposo o movindose con velocidad constante
(EQUILIBRIO).
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
Si sobre una partcula se ejerce una fuerza exterior, aquella se
acelerar en la direccin y sentido de la fuerza y el mdulo de la
aceleracin ser directamente proporcional a la fuerza e inversamente
proporcional a la masa de la partcula.
Matemticamente:El enunciado moderno de 2 ley de Newton es:donde:
a es la aceleracin de la partcula. F es la fuerza que se ejerce
sobre la partcula. m es la masa de la partcula. k es una constante
de proporcionalidad en funcin de las unidades (k = 1, si usamos las
unidades del S.I.)Esta ecuacin, vlida tanto para fuerzas constantes
como para fuerzas que varen con el tiempo (en mdulo o direccin),
nos dice que los mdulos de F y a son proporcionales y que los
vectores F y a tienen la misma direccin y sentido (ya que m es un
escalar positivo). Un sistema para el cual k = 1 tendr unidades
cinticas coherentes (Ej.- SI).La unidad de fuerza (Newton) es la
fuerza que aplicada a una masa de 1 kg le comunica una aceleracin
de 1 m/s2. En el sistema SI, el peso W de un cuerpo (fuerza de la
gravedad) vale:
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
15.2.2 Ecuaciones del movimientode un puntoCuando sobre un punto
material se ejerce un sistema de fuerzas F1, F2, F3, Fn, su
resultante es una fuerza R cuya recta soporte pasa por el centro de
masa del punto, ya que todo sistema de fuerzas que se ejerzan sobre
un punto debe constituir un sistema de fuerzas concurrentes. El
movimiento del punto material viene regido por la 2 ley de Newton
as:En funcin de sus componentes cartesianas rectangulares:Cuando se
utilice alguna de estas ecuaciones del movimiento de un punto,
deber establecerse un convenio de signos.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
15.2.3 Ecuaciones del movimientode un sistema de puntosLas
ecuaciones del movimiento de un sistema de puntos materiales se
pueden obtener aplicando la 2 ley de Newton a cada uno de los
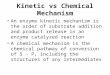
puntos pertenecientes al sistema.Ejemplo.- consideremos el conjunto
de n partculas representado en la figura. La partcula i-sima tiene
una masa mi y su situacin se especifica respecto a un sistema de
ejes de referencia adecuado utilizando el vector de posicin ri.
Cada partcula del sistema puede estar sometida a un sistema de
fuerzas exteriores de resultante Ri y a un sistema de fuerzas
interiores fi1, fi2, fi3, fin,. Las fuerzas interiores se deben a
las interacciones elsticas entre partculas y a efectos elctricos o
magnticos. La fuerza interior ejercida por la partcula pj sobre la
partcula pi se representa por fij. Aplicando la 2 ley de Newton a
la partcula i-sima se tiene:
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
En la suma de fuerzas interiores, fii es nula porque la partcula
pi no se ejerce fuerza sobre s misma.
Si una partcula pj ejerce una fuerza fij sobre la partcula pi,
la 3 ley de Newton nos dice que la partcula pi ejercer sobre la pj
una fuerza fji de igual recta soporte y mdulo que fij pero de
sentido opuesto.
Sumando las ecuaciones del movimiento correspondiente a las n
partculas del sistema se obtiene una ecuacin del movimiento para el
sistema. As pues,Esta ecuacin nos indica que la resultante R del
sistema exterior de fuerzas aplicadas que se ejercen sobre el
sistema de partculas es igual a la resultante de los vectores de
inercia m.a (denominados a veces fuerzas de inercia) de las
partculas del sistema.(1)Aplicando 2 ley de Newton a la partcula
i-sima
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
Si consideramos el CDM del sistema de puntos materiales se puede
escribir la ecuacin anterior de otra forma.El CDM del sistema es el
punto G definido por el vector de posicin rG que satisfaceDerivando
respecto al tiempo la ecuacin anterior tenemosCombinando las
ecuaciones (1) y (2) tenemos:(2)Estas ecuaciones constituyen el
principio del movimiento del centro de masa de un sistema de puntos
materiales. Como estas expresiones son formalmente iguales a las
obtenidas para un punto material nico, un sistema de puntos
materiales se puede tratar como un punto material nico, situado en
el CDM G, si se supone que se aplica una fuerza igual a la
resultante R soportada por una recta que pase por G. De hecho, todo
cuerpo puede ser considerado como punto material al aplicar la
ecuacin anterior.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
15.3 Movimiento rectilneoEn el tema 13 se describi la Cinemtica
del punto material animado de movimiento rectilneo. Si orientamos
el eje x de manera que coincida con la trayectoria del movimiento
tendremos que :En el caso del movimiento rectilneo a lo largo del
eje x, las ecuaciones de la Cintica se reducen a: En este tipo de
movimiento, podemos prescindir de la notacin vectorial y utilizar
el signo de una magnitud para indicar si el sentido de una magnitud
vectorial es el del semieje positivo o el del negativo del eje
x.
Existen 4 tipos de problemas referentes al movimiento
rectilneo:F = constante.F = funcin del tiempo.F = funcin de la
posicin.F = funcin de la velocidad.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
Primer caso: F = constante. La 2 ley da:
Integrando 2 veces respecto al tiempo se tiene:
Las dos C se pueden determinar a partir de las condiciones
iniciales del problema.
Segundo caso: F = funcin del tiempo. La 2 ley da:Se puede
integrar 2 veces respecto al tiempo la ecuacin anterior para
obtener las expresiones de la velocidad y de la posicin.
Las dos constantes que aparecen se pueden determinar a partir de
las condiciones iniciales del problema.
Tipos de problemas (movimiento rectilneo):**
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
Si observamos que:
Con lo quede donde sacamos integrando, en funcin de
Como podemos volver a integrar para obtener una relacin entre x
y t.
Las dos constantes que aparecen se pueden determinar a partir de
las condiciones iniciales del problema.
Cuarto caso: F = funcin de la velocidad. La 2 ley da:
Las dos constantes que aparecen se pueden determinar a partir de
las condiciones iniciales del problema.Tercer caso: F = funcin de
la posicin. La 2 ley da:**
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
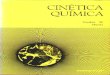
PROBLEMA 15.2Dos cuerpos A y B de masas mA = 50 kg y mB = 60 kg
estn unidos mediante una cuerda que pasa por una polea. Se suponen
despreciables las masas de polea y cuerda y que la longitud de sta
se mantiene constante. El coeficiente de rozamiento cintico entre
el bloque A y el plano inclinado vale 0,25. Determinar la tensin de
la cuerda y la aceleracin del bloque A cuando se hayan soltado los
bloques partiendo del reposo.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
PROBLEMA 15.4El trineo se utiliza para el ensayo de pequeos
cohetes propulsores de combustible slido. La masa combinada de
trineo y cohete es de 1000 kg. El empuje que proporciona el cohete
durante el movimiento del trineo puede expresarse en la forma F = a
+ bt + ct2 (F en N y t en s). Si el trineo parte del reposo cuando
el empuje del cohete es de 10 kN, recorre 700 m y alcanza una
velocidad de 150 m/s durante un recorrido de prueba de 10 s,
determinar:a) los valores de a, b y c.b) Las aceleraciones mxima y
mnima del trineo en el ensayo.Despreciar la friccin del trineo y
los rales y la reduccin de masa del combustible durante la
prueba.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
15.4 Movimiento curvilneoSu descripcin exigir utilizar dos
coordenadas y elegir uno de los tres sistemas de coordenadas planos
(cartesianas rectangulares, polares o normal/tangencial).
Coordenadas cartesianas rectangulares: la posicin de un punto se
describe con sus distancias a dos ejes de referencia (x-y). Las
ecuaciones de posicin, v y a son:15.4.1 Movimiento curvilneo plano
Movimiento curvilneo plano.- Cuando exista un sistema de
coordenadas para el cual las componentes z de la posicin, velocidad
y aceleracin sean nulas en todo instante. Movimiento curvilneo en
el espacio.- Cuando no sea posible encontrar un sistema de
coordenadas cartesianas en el cual sea nula, en todo instante, al
menos una componente de la posicin, velocidad y aceleracin.2
LeySuperposicin de dos movimientos rectilneos segn los ejes x e
y.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
Coordenadas polares: la posicin de un punto se describe
utilizando una distancia r a un punto fijo y un desplazamiento
angular relativo a una recta fija.
Los vectores unitarios er y e estn dirigidos el primero
radialmente y en sentido de alejamiento del punto fijo y el segundo
perpendicular al primero y en el sentido de los ngulos
crecientes.Las ecuaciones para la posicin, velocidad y aceleracin
son:2 LeyEcuaciones escalares
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
15.4.2 Movimiento curvilneo en el espacio Su descripcin exigir
utilizar tres coordenadas y elegir uno de los tres sistemas de
coordenadas espaciales (cartesianas rectangulares, cilndricas o
esfricas).
Coordenadas cartesianas rectangulares: este sistema es una
extensin directa del sistema rectangular empleado en los problemas
planos. Las ecuaciones de posicin, velocidad y aceleracin son:2
LeyEcuaciones escalares
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
Este sistema es una extensin directa del sistema de coordenadas
polares empleado en los problemas planos. Las ecuaciones de
posicin, velocidad y aceleracin son:2 LeyEcuaciones
escalaresCoordenadas cilndricas:
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
PROBLEMA 15.7Se dispara horizontalmente un proyectil de peso 150
N con una velocidad inicial de 225 m/s desde la cumbre de un ribazo
situada 150 m por encima de la zona circundante. Determinar el
alcance horizontal R del proyectil y el tiempo que tarda en llegar
al suelo. Desprciese la resistencia del aire.
I.T.I 1: MECANICA IDepartamento de Ingeniera Mecnica, Energtica
y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen
Saila
PROBLEMA 15.8Una esfera de masa m est unida en el extremo
superior de una varilla vertical de masa despreciable. Al dar un
pequeo desplazamiento a la esfera, se inicia la rotacin del sistema
en torno al pasador situado en O. Determinar la velocidad lineal v
de la esfera y la fuerza P en la varilla cuando sta est en posicin
horizontal, si m = 5 kg y R = 2 m.