Embed Size (px)
Citation preview

Team Space JamLaunch Readiness Review
Paul Guerrie, Ben Azlein, Megan Scheele, Bridget Chase, Shane Meikle, Taylor King, &
Jamie Usherwood
November 2, 2010
Fall 2010 R
ev D
11-30-10

Mission Overview
• The main mission of Project Monstar shall be to build a satellite that ascends to an altitude of 30km following the RFP. Project Monstar will test the use of a servo as a means of rotating a camera in the y plane, while the balloonsat naturally rotates in the x plane.
• The secondary mission of Project Monstar shall be to take pictures 360 degrees, to prove the use of the mechanical system. Project Monstar shall also record attitude of the camera with the use of a digital compass. It will also measure internal humidity, internal and external temperature of the balloonsat.
Hypothesis• We hypothesize that our mechanical system will operate by fully
rotating 360 degrees in the y plane, as the balloonsat ascends to a height of 30 kilometers. We believe that the ability to make a panoramic picture will prove the successful use of our design.
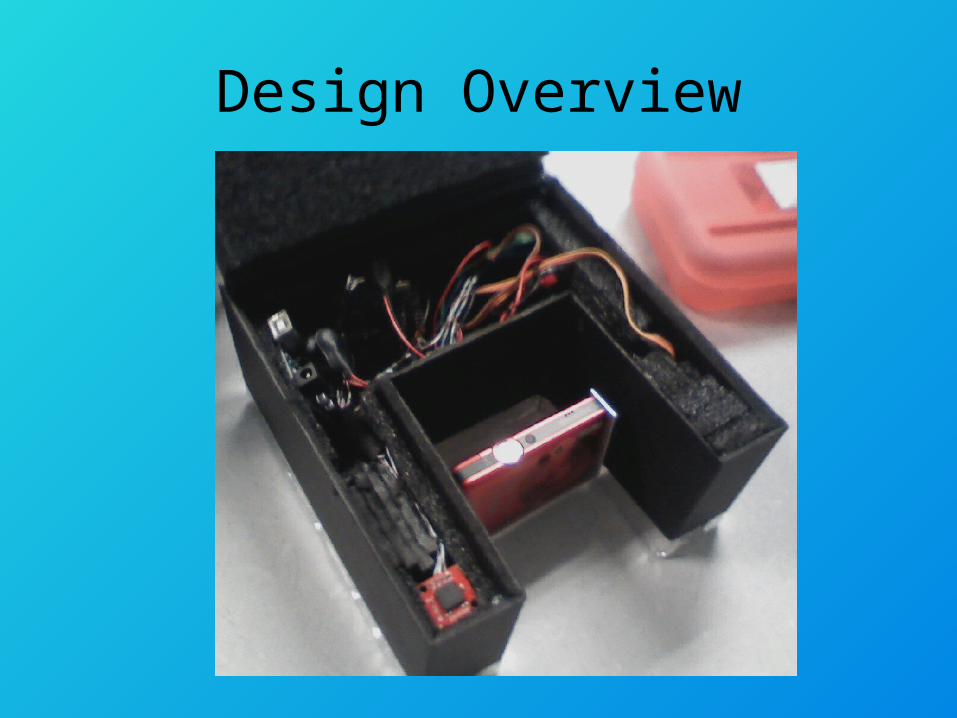
Design Overview

Design Overview
Digital Compass – The digital compass took readings off the balloonsat’s attitude throughout the entirety of the flight.
HOBO – The hobo took readings of internal and external temperature and internal humidity.
Tilt Servo – The servo tilted the camera back and forth on a vertical axis to take measurements on that entire plane.
Camera – Our camera was designed to take HD video instead of pictures for a portion of a flight so we could take stills of the video to form a panoramic picture.
Changes From Proposal
• Removed solar panels• Removed Barometer• Added 16 GB of memory to camera• Camera was mounted with metal bracket
instead of rods.• Increased width by 3 cm• Only used one servo instead of two

Functional Block Diagram•2 AA Batteries •Switch 1 •Camera •16 GB
Memory•3 9V Batteries •Switch 2 •Heate
r
• Batteries (18V)
•Switch 3
•Arduino Pro
•Servos
•Digital Compass
•HOBO
•External Temp
•Internal Temp
•Humidity

Results and Analysis
• The few components of our balloonsat that actually functioned properly were the HOBO and the digital compass
• The HOBO accurately recorded the internal and external temperatures and internal humidity (Even though temperatures weren’t what we wanted)
• The digital compass correctly took recordings of the current heading of the balloonsat during flight.

Internal Temp.

External Temp.

Humidity

Digital Compass Data• Current heading: 170.7 degrees• Current heading: 17.4 degrees• Current heading: 2.7 degrees• Current heading: 2.6 degrees• Current heading: 0.0 degrees• Current heading: 322.5 degrees• Current heading: 246.8 degrees• Current heading: 304.4 degrees• Current heading: 0.0 degrees• Current heading: 13.0 degrees• Current heading: 12.7 degrees• Current heading: 12.9 degrees• Current heading: 2.6 degrees• Current heading: 40.6 degrees• Current heading: 0.6 degrees• Current heading: 268.4 degrees• Current heading: 327.1 degrees• Current heading: 24.7 degrees• Current heading: 1.7 degrees• Current heading: 2.2 degrees• Current heading: 1.6 degrees• Current heading: 25.4 degrees• Current heading: 44.5 degrees• Current heading: 86.4 degrees• Current heading: 17.6 degrees• Current heading: 35.5 degrees
• Current heading: 63.7 degrees• Current heading: 0.0 degrees• Current heading: 0.2 degrees• Current heading: 0.4 degrees• Current heading: 225.8 degrees• Current heading: 76.0 degrees• Current heading: 185.3 degrees• Current heading: 282.1 degrees• Current heading: 310.5 degrees• Current heading: 259.4 degrees• Current heading: 276.0 degrees• Current heading: 185.9 degrees• Current heading: 172.6 degrees• Current heading: 131.8 degrees• Current heading: 130.8 degrees• Current heading: 103.6 degrees• Current heading: 259.0 degrees• Current heading: 82.0 degrees• Current heading: 118.2 degrees• Current heading: 105.9 degrees• Current heading: 0.1 degrees• Current heading: 2.3 degrees• Current heading: 130.9 degrees• Current heading: 81.6 degrees• Current heading: 0.0 degrees• Current heading: 170.7 degrees
• Current heading: 17.6 degrees• Current heading: 2.7 degrees• Current heading: 2.6 degrees• Current heading: 0.0 degrees• Current heading: 322.5 degrees• Current heading: 81.7 degrees• Current heading: 309.6 degrees• Current heading: 0.0 degrees• Current heading: 13.0 degrees• Current heading: 12.7 degrees• Current heading: 12.9 degrees• Current heading: 2.6 degrees• Current heading: 40.6 degrees• Current heading: 0.6 degrees• Current heading: 268.4 degrees• Current heading: 43.4 degrees• Current heading: 24.7 degrees• Current heading: 1.6 degrees• Current heading: 2.2 degrees• Current heading: 1.6 degrees• Current heading: 25.2 degrees• Current heading: 44.1 degrees• Current heading: 86.6 degrees

Failure Analysis
• Camera failure: upon review, the camera had no videos and when the card loaded into the computer, only one partition appeared (opposed to two)
-possible reformatting of the card due to cold
-possible that the card didn’t run it’s intended program due to cold• Servo was stopped on landing most likely
due to cold during the flight

Conclusion
• Start heater sooner• Preform more preflight testing that could
simulate real world conditions– Camera programming– Better initial temperature conditions
• Improve insulation and temperature control



Requirements Flow Down

Level One Requirements
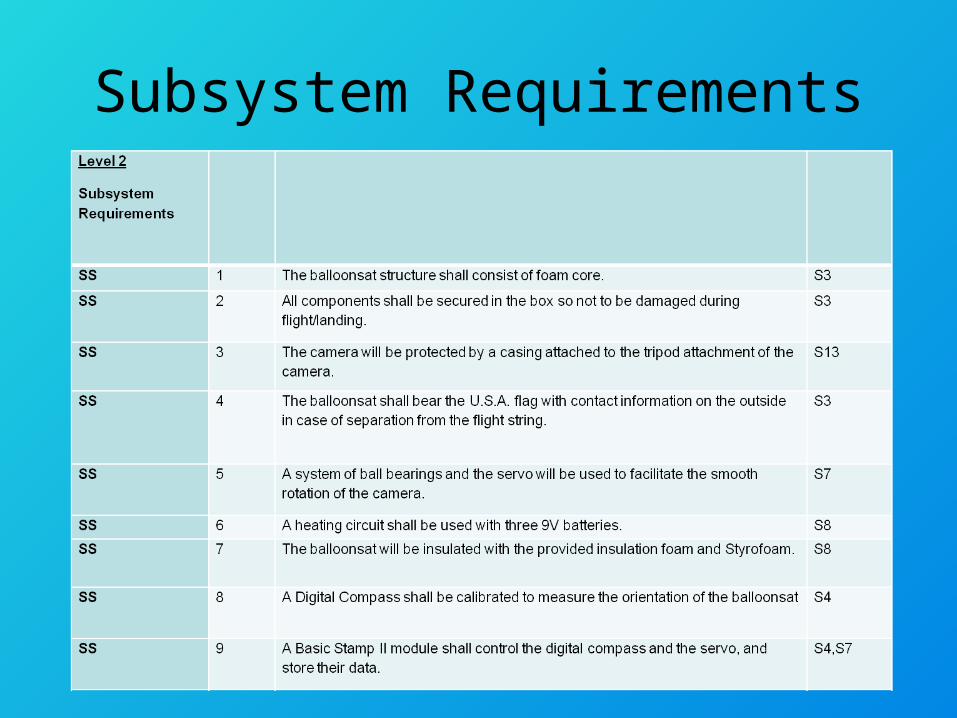
Subsystem Requirements

Mass and Cost SummaryItem Mass
(g)HOBO 30
Canon A570IS Digital Camera 200
Heater System with Batteries 145
Servo Motor 40
Digital Compass 5
Switches 10 (each) 30 (total)
Structure Weight 50
Micro Controller 1 8
Micro Controller 2 7
Metal Bracket and Bolts 100
Batteries for Micro Controllers 90
Flight Tube 20
Wires 11
Total ~736
Item Quantity (Original)
Price (Original)
Company (Original)
Quantity (Final)
Price (Final)
Company (Final)
Camera 1 Provided Provided 1 Provided Provided
HOBO 1 Provided Provided 1 Provided Provided
2 GB Memory Card 1 Provided Provided N/A N/A N/A
16 GB Memory Card
N/A N/A N/A 1 Donated Professor Koehler
Heater 1 Provided Provided 1 Provided Provided
Batteries 10 Bought by team
Bought by team
10 Bought by team
Bought by team
Foam Core (140mm x 140mm x 10mm)
1 Sheet Provided Provided 1 Sheet Provided Provided
Solar Panels 6 $2.65 (each)$15.90 (total)
Silicon Solar
12 (not needed, donated to Space Grant
$31.80 Silicon Solar
Servo Motor(s) 2 Donated ITLL Shop 1 $25 SparkFun
Switches 3 $4 (each) Radio Shack
3 Donated ITLL Shop
Digital Compass 1 $150 SparkFun 1 $150 SparkFun
Barometer 1 $40 SparkFun N/A N/A N/A
Styrofoam Recycled Recycled N/A N/A N/A
Aluminum Tape Provided Provided Provided Provided
Insulation Provided Provided Provided Provided
Micro Controllers N/A N/A N/A 2 $29.95 & $19.95$49.87 (total)
SparkFun
Metal Bracket N/A N/A N/A 1 Donated Mr. Azlein
Total $236.80 $256.67

Lessons Learned
• We would have improved our design to make it more temperature effective so our components wouldn’t have failed.
• In order to obtain different results, we could have done a better job of insulating the balloonsat, and we could have taken better prior preparations to make our satellite work correctly.

Ready to Fly Again
• Our balloonsat should be stored in a room at a relatively warm temperature and average atmospheric pressure, right side up.
• Activation:1. Turn heater and camera on prior to flight
anticipate the extreme temperatures.
2. Test servo motor prior to launch to ensure proper connection and functionality.

Message to Next Semester
• Be vocal within the group.• Teamwork is essential to success.• Compromise is an important part of
teamwork.• It’s great to have fun, but it is a serious
class.• Be creative.

Questions??
























![The PhotoReading Whole Mind System - Paul Scheele [CuPpY]](https://img.pdfslide.us/doc/110x75/55cf92b7550346f57b9909d5/the-photoreading-whole-mind-system-paul-scheele-cuppy-567d94be8b5fa.jpg)