Embed Size (px)
Citation preview

AD-AO92 596 TECHNION - ISRAEL INST OF TECH HAIFA DEPT OF AERONAU-ETC F/0 12/1THREE DIMENSIONAL OPTIMAL PURSUIT AND EVASION WITH BOUNDED CONT--ETCtU)NOV 79 .J SHINAR, S GUTMAN F99620?79-C0135
UNCLASSIFIED TAE-381 NLimihE hEmhllhEE/hhElhEI*fll flfll fll END! ,

.. I.- WE
UI.2
IL251 11-.6
MICROCOPY RESOLUTION TEST CHARTNATIONAL BUREAU OF STANDARDS-I963-A

At1VE
m

NOTICE
*When Government drawings, specifications, or other data are used for any purposeother than in connection with a definitely related Government procurement operation,the United States Government thereby incurs no responsibility nor any obligationwhatsoever; and the fact that the government may have formulated, furnished, or inany way supplied the said drawings, specifications, or other data, is not to be re-garded by implication or otherwise as in any manner licensing the holder or anyother person or corporation, or conveying any rights or permission to manufactureuse, or sell any patented invention that may in any way be related thereto.
This report has been reviewed by the Office of Public Affairs (ASD/PA) and isreleasable to the National Technical Information Service (NTIS). At NTIS, it willbe available to the general public, including foreign nations.
This technical report has been reviewed and is approved for publication.
JO . ZING6J J Q LESTER MCFAWN, ChiefProject Engineer Fire Control Technology GroupFire Control Technology Branch Fire Control Branch
FOR THE COMMANDER
MVIN SPICTORCheFire Control BranchReconnaissance & Weapon Delivery Div.
"If your address has changed, if you wish to be removed from our mailing list, orif the addressee is no longer employed by your organization please notifyAFWAL/AARTV-PAFB, OH 45433 to help us maintain a current mailing list".
Copies of this report should not be returned unless return is required by securityconsiderations, contractual obligations, or notice on a specific document.
jo=214 ~ 9

SECURITY CLASSIFICATION OF THIS PAGE (ohn Date Entered),
READ INSTRUCTIONSREPORT DOCUMENTATION PAGE BEFORE COMPLETING FORM
".TAX D.8 1'- 2. GOVT ACCESSION NO. 3 RECIPIENT'S CATALOG NUMBER
Thr Dimensional Optimal Pursuiand Interim echnical iaper 2Evasion with Bounded Controls, - ..- .
6 PERFORMING ORG. REPORT NUMBER
7. AUTHOR " " QMZ5A'L,..... UMBER(s)
J Shinar ORS. /Guta 62-7-C 5u
9. PERFORMING ORGANIZATION NAME AND ADDRESS 10. PR A6 T. PROJECT. TASK" L ... I_.--v i"NUMBERS
Technion, Israel Institute of Technology, U2E) R
Haifa, Israel F 6 0O4hFUII. CONTROLLING OFFICE NAME AND ADDRESS 12. TV
Air Force Wright Aeronautical Laboratories (AFSC t No, 01v 111179 /Avionics Laboratory (AYWAL/AABT) U . NUMBER OF PAGES
Wright-Patterson Air Force Base, Ohio 45433 3014. MONITORING AGENCY NAME a ADDRESS(If different from Controllind Office) 1S SECURITY CLASS. (of this report)
AFOSR/XOPD UnclassifiedBoiling AFB, DC 20332 _
IS&. DECLASSIFICATION! DOWNGRADINGSCHEDULE
16. DISTRIBUTION STATEMENT (of this Report)
Approved for public release; distribution unlimited.
17. DISTRIBUTION STATEMENT (of the abstract entered in Block 20, if different from Report)
18. SUPPLEMENTARY NOTES
19. KEY WORDS (Continue on reverse aide if neceswary end Identify by block number)
Missile Avoidance, Control Theory, 3-D Equations, Linear Kinematic, BoundedLimits, Stochastically Solution
j0. ABSTRACT (Continue on reverse side If necessary end identify by block number)
'The missile-aircraft pursuit-evasion problem is formulated by a three-dimen-sional linearized kinematic model with bounded control. The formulation isvalid both for the optimal control (against a known adversary strategy) and thezero sum differential game versions. Assuming perfect information the linear-ized kinematic model yields for both versions a solution which can be imple-mented in real-time for airborne application. The avoidance of a known pursuerby an evader who has no state information is solved by a stochastically optimalperiodical maneuver. Other examples of imperfect information are briefl yONT)
DO , JAN 7 1473 EDITION OF I NOV65 IS OSOLETE "
SECURITY CLASSIFICATION OF THIS Da t 0. red) 4i' " -
U.,| i,

SECURITY CLASSIFICATION Of THIS PAGE(noaa Date Bnteo;I)
BLOCK 20. ABSTRACT (CONTINUED)
discussed.
STCURtITY CLASSIFICATION OF T-- PAGE(Whon Date lFnforodi

THREE DIMENSIONAL OPTIMAL PURSUIT AND EVASION
WITH BOUNDED CONTROLS*
J. Shinar** and S. Gutman***
Technion -Israel Institute of Technology
Haifa., Israel
T.A.E. Report No. 381
*Research partially sponsored by AFSC Contract No. F49620-79-C-013S
**Associate Professor, Department of Aeronautical Engineering
**Senior Lecturer, Faculty of Mechanical Engineering.
1,

ABSTRACT
The missile-aircraft pursuit-evasion problem is formulated by a three-
dimensional linearized kinematic model with bounded control. The formulation
is valid both for the optimal control (against a known adversary strategy)
and the zero sum differential game versions. Assuming perfect information
the linearized kinematic model yields for both versions a solution which
can be implemented in real-time for airborne application. The avoidance of
a known pursuer by an evader who has no state information is solved by a
stochastically optimal periodical maneuver. Other examples of imperfect
information are briefly discussed.
or~jo
TX edT
CC~a
S E-ECTED
-DE 5 IM

TABLE OF CONTENTS
ABSTRACT .. ...................... ........ i
TABLE OF CONTENTS. .. ................... .. .. . ...
1. INTRODUCTION. ..... ................ .. .. .....
2. MATHEMATICAL ANALYSIS. .. ...................... 4
A. Two-Person Zero-Sum Linear Differential Gamnes. .. ........ 4
B. Linear Optimal Control .. ................... 6
3. APPLICATION TO 3-D PURSUIT-EVASION .. ............... 8
A. Differential Game Version. .. ................. 8
B. Optimal Control Version .. ..... ............. 13
4. DISCUSSION OF THE DETERMINISTIC RESULTS .. .... ........ 14
A. interpretation. ... ..................... 14
B. Implementation. ..... ................... 16
5. MISSILE AVOIDANCE WITH IMPERFECT INFORMATION. ... ....... 17
6. CONCLUDING REMARKS. .. ...................... 18
REFERENCES. ... ........................... 20
LIST OF FIGURES .. .. ......................... 23
am-.

1. INTRODUCTION
The research effort to solve the missile-aircraft pursuit-evasion problem
has been directed towards two important applications: (a) optimization of the
control law for guided missiles; (b) enhancement of aircraft survivability
by missile avoidance. The problem can be formulated either as a one-sided
optimization, i.e., optimal pursuit1, 2 and optimal evasion,3- 6 or as a zero-
sum differential game. 7-11 Regardless of the formulation the problem is
inherently complex. Thus the solution has to be attempted in 3 consecutive
phases:
1. Modelling, which preserves the essential features of the original problem;
2. Analytical solution of the simplified, but representative mathematical
model;
3. Implementation of the results derived from the analysis.
The objective of this paper is to discuss all 3 phases of the solution
and to present some recently obtained results.
The missile-aircraft engagement is characterized - unlike other pursuit-
evasion problems (as the "homicidal chauffer," the game of two cars, 12 etc.) -
by a "fast" pursuer (VP/VE > 1), which also has a higher lateral acceleration
capability (ap/aE > 1). Analyses based on pure kinematic models (neglecting
vehicle dynamic response) have demonstrated13' 14 that,due to such superiority
of the pursuer,point capture of the evader can be guaranteed. Yet whenever
pursuer dynamics has been taken into account , it has been shown that a
non-zero miss distance can be achieved by appropriate evasive maneuvering.
r2. . . . .. , 'i. -. .4- - -
• • ° "

-2-
Moreover, a recent study6 clearly indicated that optimal missile avoidance
requires a three-dimensional strategy.
Thus, two attractive and frequently used simplifying assumptions as:
(i) neglecting pursuer dynamics, 7- 9 13, 14 (ii) two-dimensional analy-
sis"-" 9,10,13 are not made in the mathematical model used in this paper.
Fortunately, the very nature of the missile-aircraft engagement does jus-
tify the trajectory linearization used in many studies.1-4'611
As a consequence of these major modelling considerations the missile-
aircraft pursuit-evasion is formulated and solved in the following sections
as a 3-D, linear differential game. These sections also include brief com-
parisons with the one-sided optimal control formulation.
The assumptions used in the analysis can be summarized as:
1. Both pursuer and evader are considered as point-mass vehicles.
2. The speed of each vehicle is constant, the pursuer being the faster
(VP /VE > 1).
3. The relative motion is three-dimensional (See Fig. 1).
4. Gravity, having no effect on the relative trajectory, is neglected.
5. The initial conditions of the pursuit are near to a collision course
F (See Fig.2).
6. Relative trajectory can be linearized around the initial line of sight
vector.
7. The lateral acceleration commands of both vehicles are bounded with
circular vectograms perpendicular to the respective velocity vectors
a a,,a > 1).

-3-
8. The pursuer's response to its acceleration command is approximated by
single time constant Tp.
9. Evader dynamics is neglected for sake of simplicity. (It has been
shown'4, 6 that evader dynamics has only a non-qualitative secondary
effect on missile avoidance).
10. The performance index of the problem is the miss distance (distance
of closest approach).
11. There exists perfect (complete and instantaneous information on the
state variables and the parameters of the problem. This assumption
is mandatory to obtain a solution in the deterministic sense.
Assumptions 7 and 8 present a new formulation of the three-dimensional
pursuit-evasion game compared to previous linear quadratic mathematical
models neglecting pursuer dynamics.7'8 The validity of the other assump-
tions is discussed in detail in previous papers dealing with optimal eva-
sion control.4'6
The generalized analytical solution for this class of problems, which
has been developed in recent papers, 1 ' 1 s is briefly summarized in Section
2 and applied to the three-dimensional pursuit evasion problem of interest,
defined by the above listed assumptions, in Section 3.
In Section 4 the characteristics of this entirely new solution of the
deterministic linearized differential game are discussed and in the sequel
the implementation of the optimal strategies is considered.
Since implementation depends on the available information, the difficul-
Pties created by non-complete information are examined. In Section 5 an
example of a recent stochastically optimal solution is presented for mis-
sile avoidance without state information. Other cases of imperfect in-
formation are also discussed briefly.
.................... .....

-4-
2. MATHEMATICAL ANALYSIS
A. Two-Person Zero-Sum Linear Differential Games. i
It is assumed that the reader is familiar with basic results in two-
person zero-sum differential games.'12 16 Let a game of fixed duration be
defined by
x=A(t)x + B(t)u +C(t)v, x(O) =xO
u EU , v EV1()
J = IIDx(T)II
where matrices A, B, C, D, have proper dimensions and A(-), B(-), Q() are
continuous.I
It is required to find among all admissible strategies {p(-), e(-)},
such that u(t) = p(x(t),t), v(t) = e(x(t),t), an optimal strategy pair
{p*(.), e*(*)} satisfying the saddle point inequality
J(x,t,p*,e) S J(x,t,p*,e*) =J*(x,t) .j J(x,t,p,e*) (2)
In order to simplify (1), let
y = D (T,t)xI
B(T,t) = Dci(T,t)B (3)
C(T,t) = D4'(T,t)C
where 4'(T,t) satisfies
dt

S -
-5-
By (3) the game (1) is transformed to
= B(T,t)u + C(T,t)v , y(O) = Yo
u E U , vEV E (5)
J = IIy(T)R
For this formulation a candidate optimal strategy pair is given" by
Min E*'B(T,t)u = C*'B(Tt)p*uEU
(6)
Max *'C(T,t)v = F*C(T,t)e*
where both the vector F* and the value of the game J* are determined by
J* = Sup V'y+ f [Min ' B(T,T)u + Max E' C(T,T)v dT} (7)
RE11=l t uEU vEV
Now a sufficiency theorem on the existence of the saddle point solution is
presented.
Definition: A tube IT is defined by
n = {(y,t) J*(y,t) = c,c > 0
T . = {(y,t) : J*(y,t) < c,c > 0
iTo = {(y,t) J*(y,t) > c,c > 0
Based on this definition, the following theorem has been proved. 1
Theorem 1. Consider game (5). Let y(t) E n and suppose that iT is C1. Then

-6-
(M) {p*('),e*(.)} given by (6)-(7) is an optimal strategy pair;
(ii) p*(') guarantees the minimizer a cost not higher than c, while
e*(.) guarantees the maximizer a cost not lower than c;
(iii) Yo E i. implies that a solution y('), generated by {p*,e} remains1
in 7i; likewise, Yo E 7o implies that a solution y(-) generated
by {p,e*} remains in io.
A direct consequence of this theorem is that along an optimal trajec-
tory, E* is a constant unit vector.
Remark 1. In case 7 is only piece-wise smooth, Eq.(7) still determines the
optimal cost J* and the vector E* at every point along those optimal tra-
jectories which do not intersect the region of non-smoothness. (For a more
detailed discussion on this subject, see Refs. 16 and 17).
B. Linear Optimal Control
If one of the participants has a fixed strategy known by his adversary
the problem reduces to a one sided optimization. In this subsection the
optimal control problem is formulated from the maximizer's viewpoint (a
similar formulation for the minimizer will not be repeated). Assuming
that the minimizer has a known linear feedback control law u= K(t)x (with-
out hard clnstraints being imposed), the one sided version of (1) becomes
x = A(t)x + C(t)v x(o) =xo
v E Vf (8)
J = IIDx(T) H
with A(t) = A(t) + B(t)K(t).

-7-
A transformation similar to (3) simplifies (8) to
y = C(T,t)v y(O) = yo
v EV 1(9)J = y(T)h
For this formulation the optimal control v*(t) is given by
Max &'T(T,t)v *C(T,t)v* (10)vEv
where * and the optimal cost J* are determined by
J*(y,t) = Sup lIy + Max &' C(T, T)vj dT) (11)tj LvEV
Along an optimal solution &* is a constant unit vector. It is important to
note that the one sided optimization is valid (unlike the differential game
version) without any further assumption on the smoothness of J(-).

-8-
3. APPLICATION TO 3-D PURSUIT-EVASION
A. Differential Game Version
In this sub-section the missile-aircraft pursuit-evasion is solved based
on the set of assumptions 1-11 as a zero-sum perfect information linear dif-
ferential game in three-dimensional space (Fig. 1). By Ass. 5 the analysis
is restricted to the neighborhood of collision course (Fig. 2) where the
relative trajectory can be linearized (Ass. 6). As a consequence of the
linearization, the relative motion in the line of sight direction (the X
axis) is of constant speed and the duration of the game T is determined. The
dynamics to be considered is perpendicular to the line of sight. In this
coordinate system the control vectograms, which are by Ass. 7 circular, per-
pendicular to the respective velocity vectors, become elliptic (See Fig. 3).
Accordingly, the equations of motion of the three-dimensional pursuit-
evasion have the form of (1) with
U u : u'Ru < a2 }
(12)
V- {v : v'Sv <a2 }
where the matrices R, S are symmetric and of proper dimensions. By defining
(see Fig. 1)
y _ y _ Y E Z _ Zp ZE (13)
the state vector x is of 6 components
x= [,,Yp" ZZZ (14)' P1

-9-
The matrices in (1), (4), and (12) are
with
0 1 0Al 0 0 1 FD 0 0 0 00i~ 00 1 0=
0 lIT 1 0 0 : 0
BI I/T[ : i: 0
[0 0 :0 0 0 ]
0 0 0 0 -1
R=[1/COS2XP(o) 0] S l/Cosx2EX ) 0]
Note that V P/V E> 1 (Ass. 2) implies that cosX P(0) > coSxE (0) (See Fig. 2).
Equations (3) have the form
= = Y + (T::)Y + :13Y (15
B=(0 1 3/T ,)1 2 ; 0 12 12 (16)
wih012 T 013 T 2 1P(0) (17)
p p

10-
where
6 T-t
p (18)
is the normalized "time-to-go" and
A -O
4)(O) _ 0 + e 1 > 0 V 0 > 0 (19)
Let R-1 = MI M and S- ME M
[ XP ] ; ME= [osXE(o) 0]
Then equation (6) is satisfied (using 8 rather than t) by
p*(y,O) = - aRMl'p IM p *I
(20)
e*(y,O) =- a M.' MEE E M *ff
E
where t* and the value of the game are determined by
J*(yO) Sup { 'y - a(O) Mp , B(O)IM EI} (21)
with
c(0) a T2 2(n)dn -a -2,= apTp J ipr2r at~[
e (22)S(O) a, 2 202ndn aETp 2aETp 0
I, --- J

- 1 1 I
It can be directly concluded from (21), (22) that at y = 0, *' =
= (0, ±1); i.e., the optimal control vectors are perpendicular to the no-
minal collision plane. Moreover, the same conclusion holds for {y: Yi = 0}.
The existence of such a saddle point solution can be proved (based on
the definition of the tube n) via Theorem 1 of the previous section, if all
tubes are smooth (see also Remark 1).
For this particular problem a simple test on (21) shows that at some
subregions of {Y;Y2 = 0} (containing y = 0), E* is not unique; hence
tubes n in these regions are not smooth. Since the investigation of piece-
wise smooth tubes is not the aim of the present paper (Refs. 16 and 17 deal
with this topic), we slightly modify the control set U, V, in order to avoid
this phenomenon. In a usual situation ap cos Xp(O) > aE (see Fig. 3).
Based on this observation, we reformulate the problem from the pursuer's
point of view. Replacing in (12) the matrices R and S by the identity ma-
trix yields circular vectograms and consequently,
MP = ME = 12 (23)
If we further replace in (12) ap by
p P, ap cos Xp(0, (24)
the "worst case" version of the original problem is obtained from the
pursuer's point of view (aE = aE). For this formulation
y ^(25)lyl
and consequently the optimal strategies and the Value of the game are given by
~[

- 12 -
p (y,0) = - py
(26)
*(y,e) = - -
J*(y,B) = ly ae) + B(o) (27)
with 3p replacing ap in (22).
Analysis of the tubes shows that there exists some cm such that a tube
11(C = cm) is tangent to {(y,6) : y = 0} at 8 = 8 . Such tube is called the
"minimal tube.""1 The point of tangency 8 = 8 can be easily computed bys5
setting in (27) J* = cm
lyl = c + a(e) - 8() (28)
8 is now defined by
W = 0 (29)
yielding
aE-06
~P
The minimal cost c is obtained by substituting (30) and y = 0 into~m
Eq.(28)
Cm ae s +[ i(- (31)= Ep , 1 2 - E
The dependence of e and c ,fc/aET2 on the maneuver ratio (aE/aP) iss m E P
depicted in Fig. 4.
4 l ~ ~-- . . .. S . . ,

- 13 -
It is easy to see from (27) that all tubes 7r (c > cm) are smooth. As
a consequence of the existence of the "minimal tube" the (y,O) state space
can be decomposed into D and D , being defined as
Dc {(y,e)ir :c. > c }U{(ye) : 0 < s ) (32)
The optimal strategy pair j*(.), *() is given by (26) in Dc and by any
arbitrary admissible pair in D. The Value of the game J (i.e., the miss
distance guaranteed to players using the optimal strategy pair) is de-
termined by (27) in Dc and by cm = const. (31) for every point in D.
B. Optimal Control Version
In the investigation of the avoidance of a proportionally guided mis-
sile, one deals with a model of the form given in (8). Following the
notation of the previous sub-section, the solution has the form
ME *
e*(y,O) - aEE IM E sgn i12 (0) (33)
where the constant vector * and the optimal cost T* are given by
j*(y,6) = Sup {E'y + "()IME&I1 (34)I11
6
= aETP IT , (n) Idn (35)
As in the game version, it is clear that at y = 0, ' u (0,1), i.e.,
the optimal control is directed perpendicular to the initial collision
hLim

14-
plane. Eq. (34) is an extension of the solution obtained in Ref. 6, which
was derived for yo 0.
It is very important to observe that i12 (0) is not the same as 012 in
(17) and as a consequence it is no longer positive for all 0. As a matter
of fact 012(0) is a switching function (computed in Ref. 4).
4. DISCUSSION OF THE DETERMINISTIC RESULTS
A. Interpretation
The deterministic solution of the differential game version gives the
optimal strategies and the resulting miss distance as a function of the
"reduced state" y and the normalized "time-to-go" e. The vector y can be
interpreted as the "predicted miss distance," being composed (see Eq. (15))
of the "zero-effort miss" and an acceleration term compensating for pursuer
dynamics.
The decomposition of the (y,O) state space is of major significance.
The domain V is characterized by "long" pursuit times 0 > 0s and small or
moderate deviations from collision course. This region (where according
to Ass. 5 most trajectories begin) is dominated by the pursuer, who can
reduce, for any trajectory initiated in D, the predicted miss distance to
zero at 0 = 0s against any admissible evasive maneuver. Though the pursuer
strategy can also be an arbitrary admissible one in V, an adaptation of a
linear time varying feedback control law as proposed for the 2-D casel'
may be an attractive choice. This strategy has some similarity with the
guidance laws obtained by one sided linear quadratic optimization.1'1x
~~;

i - 15 -
As every trajectory initiated in D passes through the point (y = 0,
0 = s), they all have the same strategy for 0 -< 6 s and consequently an
outcome independent of the initial conditions. In the original formula-
tion (Eqs. (12)-(22)), the terminal strategy is given by E = 0, i.e.:
hard maneuvering perpendicular to the initial collision plane. This veri-
fies the recently obtained result for optimal missile avoidance,6 and con-
firms the necessity of 3-D analysis. The direction chosen is the one where
the evader-pursuer maneuver ratio is maximal (see Fig. 3), being the conse-
quence of (21) for y = 0.
The main limitation of the present analysis lays in the trajectory lin-
earization (see Ass. 6). In a previous paper, 6 dealing with the optimal
control version of the same problem, it was concluded that trajectory lineari-
ztion is justified if two conditions are satisfied:
1. The dynamic similarity parameter of the problem,1' which can be inter-
preted as the maximum direction change of the evader during the period of the
pursuer's time constant, is small.
2. The optimal solution does not predict excessively long maneuvers in
any specific direction.
The first condition can be observed before the linearized trajectory as-
sumption is adopted. The second one, however, requires an "a posteriori"
verification. The total change of interception geometry has to be computed
and examined to decide upon the validity of the linearization.
In order to put the present analysis in the proper context with some
"classical" missile avoidance concepts the following remark seems to be of
relevance. V,. ) superiority of the pursuer (VP > VE) and the constant
speed hypothesis (See Ass. 2),used in the mathematical model, clearly indicateI

16-
that the initial conditions of the engagement has been chosen well inside
the effective firing envelop of the missile, ruling out the so called
fleeing tactics of the evader. Such tactics, having the objectve to
convert a head-on engagement into a tail-chase, hope to profit from
eventual missile slow down. They can be effective only against mis-
sile systems which use an "ill determined" (constant target direction)
firing zone concept.
B. Implementation
Optimal strategies are based on perfect knowledge of the reduced state
variables and the "time-to-go". The computation of "time-to-go" requires
range and range-rate measurements. The "zero-effort miss" can be computed
if the rate of turn of the line of sight is also measured. These measure-
ments, as well as of the actual missile acceleration, are of common
practice in many guidance systems. Thus the implementation of the optimal
pursuer strategy given by (25) does not seem to present difficulties. The
efficiency of such scheme will however depend on the accuracy of the meas-
urements or the estimation process.
By contrast, the implementation of the corresponding evasion strategy
is a rather formidable, if not impossible, task. Although some recent ef-
forts have been made to estimate the "zero-effort miss" and the "time-to-
go" onboard of aircraft by appropriate filtering,12 the estimation of mis-
sile acceleration is beyond the state of art. Moreover, the optimal strat-
egy assumes perfect knowledge of the missile parameters. It has to be based
on previous intelligence as well as on real-time identification of the
N

17 -
particular type of missile to be avoided. If intelligence is available,
it may also include data on the actual guidance law, reducing the problem
to a one sided optimization,3-6 where the evader can achieve (assuming
perfect information) larger miss distances than guaranteed by (26) and (27).
It can be concluded that for missile avoidance applications the hypo-
thesis of perfect information is a most critical one and in many cases it
cannot be justified. Therefore, the problem has to be re-examined with
non complete information.
I:
5. MISSILE AVOIDANCE WITH IMPERFECT INFORMATION
In the optimal missile avoidance problem there are several sources of
information imperfections:
a) Lack of intelligence or identification 'parameter uncertainty);
b) Unaccessible state variables (partial observability);
c) Unaccurate state variables (measurement errors or noise);
d) Non existent threat warning (no initial conditions).
Each of these topics deserves a separate analysis and a detailed dis-
cussion. In the limited scope of this paper it seems, however more produc-
tive to present an example which illustrates the relative importance of
perfect state information to successfull missile avoidance.
For this purpose it is assumed that the evading airplane has no infor-
mtion on the relative state (including initial conditions), but the pursuer
parameters are known. This problem has been recently solved" by determin-
ing a periodical random phase maneuver which maximizes the R M.S. value of )A' I
r .:

-18-
the miss distance. It has been shown that such periodical strategy is
much superior to the Random Telegraph Maneuver mentioned in previous
works20 21 and it is indeed of optimal structure. The optimal frequency
w* and the resulting miss distance distribution can be computed as func-
tions of pursuer and evader parameters.
Comparing the results of such stochastic optimization to the case of
perfect information (for an example of two-dimensional missile guided by pro-
portional navigation, N' = 4.0) reveals that the R.M.S. miss distances rech
60-80% of the optimal deterministic value. This comparison indicates that
the degradation of missile avoidance capability due to imperfect informa-
tion may not be as serious as it could have been estimated. If the avoid-
ance efficiency could be partially retained in the stochastic sense even
for a total absence of state information, there is a definite hope that bet-
ter (and probably satisfactory) performance could be achieved if partial or
noise corrupted state measurements do exist.
6. CONCLUDING REMARKS
In this paper the 3-D missile-aircraft pursuit-evasion is solved in a
closed form as a linear zero-sum perfect information differential game. It
is the first time that such solution of this problem with a realistic math-
ematical model, taking into account hard control constraints and pursuer
dynamics, is presented. The compact closed form solution is an application
of a recently developed methodology,1 ' 15 which can be equally used for the
one sided optimal control formulation of the problem. The solution of the
- 4 - -K* I *r-

19 -
game has a very clear geometrical interpretation creating a new insight
for the missile-aircraft pursuit-evasion. As a consequence, the applicabi-
lity of the results can be directly discussed.
The optimal strategy for the pursuer, proposed by the closed form solu-
tionseems very attractive for guided missile applications. On the contra-
ry, the implementation of the deterministic optimal missile avoidance strat-
egy presents serious difficulties due to incomplete available information.
In the paper the sources of imperfect information are discussed and for
the "worst case" example of total absence of state information a stochasti-
cally optimal solution is given. Comparison to relevant deterministic
results shows that the degradation of avoidance efficiency, due to lack of
information, is not overwhelming. It implies a potential of better results
for the case of partial or noisy state measurements and parameter uncer-
tainties. These problems require an extensive future research.
5,,-*.... . 1

-r ... ..-. - .....--
200
- 20 -
REFERENCES
1. Cotrell, R.G., "Optimal Intercept Guidance for Short Range Tactical Mis-
siles," AIAA Journal, Vol. 9, No. 7, July 1971, pp. 1414-1415.
2. Asher, R.B., and Matuszewski, J.P., "Optimal Guidance with Maneuvering
Targets," Journal of Spacecraft and Rockets, Vol. 11, No.3, March 1974,
pp. 204-206.
3. Slater, G.L., and Wells, W.R., "Optimal Evasive Tactics against a Pro-
portional Missile with Time Delay," J. Spacecraft and Rockets, 10, 5,
May 1973, pp. 309-312.
4. Shinar, J., and Steinberg, D., "Analysis of Optimal Evasive Maneuvers
Based on a Linearized Two-Dimensional Model," J. Aircraft, 14, 8, Aug.
1977, pp. 795-802.
5. Steinberg, A., Forte, I. and Shinar, J., "A Qualitative Analysis of
Optimal Evasion in 2-D," 20th Isr. Ann. Conf. on Aviation and Astro-
nautics, 22-23 Feb., 1978, pp. 111.
6. Shinar, J., Rotsztein, Y., and Bezner, Z., "Analysis of Three-Dimen-
sional Optimal Evasion with Linearized Kinematics," J. Guidance and
Control, Vol. 2, Nov-Dec. 1979.
7. Ho, Y.C., Bryson, A.E., and Baron, S., "Differential Games and Optimal
Pursuit-Evasion Strategies," IEEE Trans. of Automatic Control, Vol.
AC-10, 4, Oct. 1965, pp. 385-389.
8. Aumasson, C., "Approche du Problem de l'Interception Tridimensionnelle
Optimale par la Th~orie des Jeux Differentiels Lineares Quadratiques,"
La Recherche Aerospatiale, No. 1976-6, Sept.-Oct., pp.255-266.

- 21
9. Gutman, S., and Leitman, G., "Optimal Strategies in the Neighborhood of
a Collision Course," AIAA J., 14, 9, Sept., 1976, pp. 1210-1212.
10. Gutman, S., "On Optimal Guidance for Homing Missiles," J. Guidance and
Control, Vol.2, July-Aug. 1979, pp. 290-300.
11. Gutman, S., "Remarks on Capture-Avoidance Games," (to appear in
J.O.T.A.).
12. Isaacs, R., Differential Games, Wiley and Sons, New York, 1965.
13. Cocayne, E., "Plane Pursuit with Curvature Constraints," SIAM J. Appl.
Math., Vol.15, No.6, Nov. 1967, pp. 1511-1516.
14. Rublein, G.T., "On Pursuit with Curvature Constraints," SAM J. Con-
trol, Vol.10, No.1, Feb. 1972, pp. 37-39.
15. Blaquiere, A., Gerard, F., and Letman, G., Quantitative and Qualitative
Games, Academic Press, New York, 1969.
16. Gutman, S., "Linear Differential Games with Bounded Controls," TME Re-
port No. 365, Faculty of Mechanical Engineering, Technion, Israel Inst.
of Technology, Haifa, 1979.
17. Shinar, J., Gutman, S., and Medinah, M., "On Singular Surfaces in a
Linear Differential Game with Asymmetrically Bounded Control," TAE Re-
port No.387, Department of Aeronautical Engineering, Technion, Israel
Inst. of Technology, Haifa, 1979.
18. Shinar, J., and Rotsztein, Y., "Similarity Parameters in Pursuit-Eva-
sion Problems," TAE Report No. 336, Department of Aeronautical Eng.,
Technion, Israel Inst. of Technology, Haifa, Apr. 1978.
19. Brown, C.M., et al, "Trajectory Estimation for Air-to-Air Threat/Col-
lision Assessment," Proceeding8 of NAE Conf. 77, pp. 340.
U-. . . .t

- 22
20, Bezner, E., "Optimal Evasive Maneuvers in Conditions of Uncertainty,"
M.Sc. Thesis, Technion, Israel Inst. of Technology, Aug. 1978.
21. Speyer, J.L., "An Adaptive Terminal Guidance Scheme Based on an Ex-
ponential Cost Criterion with Application to Homing Missile Guidance,"
IEEE Trans. on A-E., Vol. AE-21, No.3, June 1976, pp. 371-375.
22. Fitzgerald, R.J., and Zarchan, R., "Shaping Filters for Randomly
Initiated Target Maneuvers," AIAA Guidance and ControZ Conference,
Palo Alto, California, August 1978.
77,

-23-
LIST OF FIGURES
Page
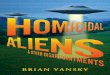
FIGURE 1. 3-D Pursuit-Evasion Geometry. 24
FIGURE 2. Collision Course Geometry . . . .. . . 25
FIGURE 3. Acceleration Vectograns Perpendicular to the Initial Line of
Sight......_............... ........ 26
FIGURE 4. Dependence of e s and the Normalized Minimal Cost E on the Evader-
Pursuer Maneuver Ratio.. . . . ... . . . 27

t
-14 -
I,w w
w N\.ILl IQ~
N 4J
Ia-N C.,
w In1W
Lu
4J
In
a. Na. 2J
Na. U-
a-
N

0%go
wUX
W14)
%mo
we 9-

ILL4)
0 0
uu
0
4.$4

0.
E Eo o w
48
A -lllkamk0
















![Kittichai Wathanapanyachon[TAE]](https://img.pdfslide.us/doc/110x75/56813d04550346895da6a8b7/kittichai-wathanapanyachontae.jpg)