Embed Size (px)
Citation preview

Applied Mathematics and Computation 204 (2008) 170–177
Contents lists available at ScienceDirect
Applied Mathematics and Computation
journal homepage: www.elsevier .com/ locate /amc
H1 synchronization of time-delayed chaotic systems
Ju H. Park a,*, D.H. Ji b, S.C. Won b, S.M. Lee c
a Robust Control and Nonlinear Dynamics Laboratory, Department of Electrical Engineering, Yeungnam University, 214-1 Dae-Dong, Kyongsan 712-749,Republic of Koreab Department of Electronic and Electrical Engineering, Pohang University of Science and Technology, San 31 Hyoja-Dong, Pohang 790-784, Republic of Koreac Platform Verification Division, BcN Business Unit, KT Co. Ltd., Daejeon, Republic of Korea
a r t i c l e i n f o a b s t r a c t
Keywords:Time-delayed chaotic systems
H1 synchronizationDynamic feedbackLMI0096-3003/$ - see front matter � 2008 Elsevier Incdoi:10.1016/j.amc.2008.06.012
* Corresponding author.E-mail address: [email protected] (J.H. Park).
This paper considers H1 synchronization of a class of time-delayed chaotic systems withexternal disturbance. Based on Lyapunov theory and linear matrix inequality (LMI) formu-lation, the dynamic feedback controller is established to not only guarantee synchroniza-tion between derive and response systems, but also reduce the effect of externaldisturbance to an H1 norm constraint. Then, a criterion for existence of the controller isgiven in terms of LMIs. Finally, a numerical simulation is presented to show the effective-ness of the proposed chaos synchronization scheme.
� 2008 Elsevier Inc. All rights reserved.
1. Introduction
During the last decades, chaotic systems have attracted a lot of interests. Many fundamental characteristics have beenfound in a chaotic system, such as excessive sensitivity to initial conditions and fractal properties of the motion in phasespace. In particular, chaos synchronization, first proposed by Fujisaka and Yamada in 1983 [1], did not received great atten-tion until 1990 [2]. From then on, chaos synchronization has been extensively investigated due to the potential application invarious fields such as biology, economics, signal generator design, secure communication, and so on [3–6]. Based on variouscontrol theories, a number of synchronization schemes have been proposed in the literature [7–15].
In real physical systems, some noise or disturbances always exist that may cause instability and poor performance. There-fore, the effect of the noises or disturbances must be also reduced in synchronization process for chaotic systems. In thisregards, recently, Hou et al. [16] firstly adopted the H1 control concept [17,18] to reduce the effect of the disturbancefor chaotic synchronization problem of a class of chaotic systems. On the other hand, since Mackey and Glass [19] first foundchaos in time-delay system, there has been increasing interest in time-delay chaotic systems [20,21]. The synchronizationproblem for time-delayed chaotic systems is also investigated by some researchers [22–24]. However, the H1 synchroniza-tion for time-delayed chaotic systems with disturbances has not been studied yet.
In this paper, we consider the problem of H1 chaos synchronization for time-delayed chaotic system with disturbance.Dynamic feedback controller for the synchronization between derive and response systems is proposed. By the feedbackcontrol scheme, the closed-loop error system is asymptotically stable and the H1-norm from the disturbance to controlledoutput is reduced to a prescribed level. Based on the Lyapunov method and LMI framework, an existence criterion for suchcontroller is represented in terms of LMIs. The LMIs can be easily solved by various convex optimization algorithms devel-oped recently [25].
. All rights reserved.

J.H. Park et al. / Applied Mathematics and Computation 204 (2008) 170–177 171
Notation: Rn denotes the n-dimensional Euclidean space, and Rm�n is the set of m� n real matrix. j � j represents the abso-lute value. k � k refers to the Euclidean vector norm and the induced matrix norm. I denotes the identity matrix with appro-priate dimension. AT means the transpose of the matrix A. We denote the positive (non-negative) definiteness of byA > 0ðA P 0Þ and the negative (non-positive) definiteness of A by A < 0ðA 6 0Þ. A > B means A� B is a positive definite ma-trix. diagf� � �g denotes the block diagonal matrix. I represents the elements below the main diagonal of a symmetric matrix.kminðAÞ denotes the smallest eigenvalue of A.
2. Problem formulation
Consider a class of time-delayed chaotic systems described by
_xðtÞ ¼ A0xðtÞ þ A1f ðxðtÞÞ þ A2f ðxðt � hÞÞ;zxðtÞ ¼ CxðtÞ;
ð1Þ
where x 2 Rn is the state variable, zx 2 Rq is the output, the matrices A0;A1;A2 2 Rn�n and C 2 Rq�n are known constantmatrices, and f ðxðtÞÞ 2 Rn is a nonlinear function vector satisfying the global Lipschitz condition: i.e,
jf ðx1Þ � f ðx2Þj 6 jFðx1 � x2Þj;8x1; x2 2 Rn; ð2Þ
for a known constant matrix F.The synchronization problem of system (1) is considered using the drive-response configuration [2]. This is, if the system
(1) is regarded as the drive system, a suitable response system with control input should be constructed to synchronize thedrive system. According to the above drive-response concept, unidirectionally coupled chaotic systems can be described bythe following equations:
_yðtÞ ¼ A0yðtÞ þ A1f ðyðtÞÞ þ A2f ðyðt � hÞÞ þ BuðtÞ þ DwðtÞ;zyðtÞ ¼ CyðtÞ;
ð3Þ
where yðtÞ 2 Rn is the state vectors of response system, B and D are constant matrices with appropriate dimensions,wðtÞ 2 Rl is the external disturbance, zyðtÞ is the output of the response system, and uðtÞ is a unidirectionally coupled term,which is regarded as the control input and will be appropriately designed such that the specific control objective is achieved.
Now, let us define the synchronization error as
eðtÞ ¼ yðtÞ � xðtÞ: ð4Þ
Then, the dynamics of synchronization error between the master and slave systems given in Eqs. (1) and (3) can be describedby
_eðtÞ ¼ A0eðtÞ þ A1g1ðtÞ þ A2g2ðtÞ þ BuðtÞ þ DwðtÞ;zeðtÞ ¼ CeðtÞ;
ð5Þ
where zeðtÞ ¼ zyðtÞ � zxðtÞ, g1ðtÞ ¼ f ðyðtÞÞ � f ðxðtÞÞ, and g2ðtÞ ¼ f ðyðt � hÞÞ � f ðxðt � hÞÞ.Next, in order to synchronize between drive system (1) and response one (3) in the sense of H1 theory [17], let us con-
sider the following dynamic feedback controller:
_fðtÞ ¼ AcfðtÞ þ BceðtÞ;uðtÞ ¼ CcfðtÞ; fð0Þ ¼ 0;
ð6Þ
where fðtÞ 2 Rn is the state vector of controller, and Ac , Bc and Cc are gain matrices with appropriate dimensions to be deter-mined later.
Applying this controller (6) to system (5) results in the closed-loop system:
_�xðtÞ ¼ R0�xðtÞ þ R1g1ðtÞ þ R2g2ðtÞ þ DwðtÞ; ð7Þ
where
�xðtÞ ¼eðtÞfðtÞ
� �; R0 ¼
A0 BCc
Bc Ac
� �; R1 ¼
A1
0
� �; R2 ¼
A2
0
� �; D ¼
D
0
� �:
Definition 1. (H1 synchronization) [17]. The synchronization error systems (3) is H1 synchronization with thedisturbance attenuation c if the following conditions are satisfied:
� With zero disturbance, the synchronization error systems (3) with control input uðtÞ is exponentially stable.� With zero initial condition and a given constant c > 0, the following condition holds:
J ¼Z 1
0½yT
eðtÞyeðtÞ � c2wTðtÞwðtÞ�dt 6 0; i:e supw6¼0;w2L2 ½0;1�
jjyeðtÞjj2jjwðtÞjj2
6 c
!: ð8Þ

172 J.H. Park et al. / Applied Mathematics and Computation 204 (2008) 170–177
Then, the controller uðtÞ is said to be the H1 synchronization controller with the disturbance attenuation c. The parameter cis called the H1-norm bound of the controller.
The following fact will be used for deriving main result.
Fact 1. The linear matrix inequality
ZðxÞ YðxÞI WðxÞ
� �> 0;
is equivalent to
WðxÞ > 0 and ZðxÞ � YðxÞW�1ðxÞYTðxÞ > 0;
where ZðxÞ ¼ ZTðxÞ, WðxÞ ¼WTðxÞ and YðxÞ depend affinely on x.
3. Main result
The main result for achieving H1 synchronization is stated in the following theorem.
Theorem 1. For given g, a, �, and c, there exist a dynamic feedback controller (6) for the error system (5), if there exist anymatrices bA; bB; bC, a positive scalar b, and positive-definite matrices bD, S and Y satisfying the following LMIs:
U ¼
U1 U2 A1 A2 0 0 D U4
I U3 SA1 SA2 0 0 SD 0I I �aI 0 0 0 0 0I I I �bI 0 0 0 0I I I I ��I þ bFTF 0 0 0I I I I I �Q 0 0I I I I I I �c2I 0I I I I I I I U5
266666666666664
377777777777775< 0; ð9Þ
and
Y I
I S
� �> 0; ð10Þ
where
U1 ¼ A0Y þ YAT0 þ BbC þ bC TBT þ bD þ gY;
U2 ¼ A0 þ bAT þ �Y þþaYFTF þ YCTC þ gI;
U3 ¼ SA0 þ AT0Sþ bB þ bBT þ �I þ aFTF þ CTC þ gS;
U4 ¼ �Y aYFT YCT� �
;
U5 ¼ diagf��I;�aI;�Ig:
Then, the H1 synchronization with the disturbance attenuation rate c is achieved by control law (6).
Proof. Let us consider the following Lyapunov function:
V ¼ �xTðtÞP�xðtÞ þZ t
t�h
�xTðsÞQ�xðsÞds; ð11Þ
where Q ¼ diagf�I;Qg with Q > 0.Taking the time derivative of V along the solution of (7), we have
_V ¼ 2�xTðtÞPðR0�xðtÞ þ R1g1ðtÞ þ R2g2ðtÞ þ DwðtÞÞ þ �xTðtÞQ�xðtÞ � �xTðt � hÞQ�xðt � hÞ: ð12Þ
From Eq. (2), it is clear that
gT1ðtÞg1ðtÞ ¼ gT
1ðtÞg1ðtÞ 6 jFeðtÞj2 ¼ �xTðtÞFTF�xðtÞ;gT
2ðtÞg2ðtÞ 6 �xTðt � hÞFTF�xðt � hÞ;ð13Þ
where
F ¼F 00 0
� �:

J.H. Park et al. / Applied Mathematics and Computation 204 (2008) 170–177 173
Then, for positive scalars a and b, we have
a½�xðtÞTFTF�xðtÞ � gT1ðtÞg1ðtÞ�P 0;
b½�xTðt � hÞFTF�xðt � hÞ � gT2ðtÞg2ðtÞ�P 0:
ð14Þ
Then, substituting (14) into Eq. (12) gives that
_V 6 fTðtÞ
RT0P þ PR0 þ Q þ aFTF PR1 PR2 0 PD
I �aI 0 0 0I I �bI 0 0I I I �Q þ bFTF 0I I I I 0
26666664
37777775fðtÞ � fTðtÞCfðtÞ; ð15Þ
where
fTðtÞ ¼ �xTðtÞ gT1ðtÞ gT
2ðtÞ �xTðt � hÞ wTðtÞ� �
:
Therefore, if C 6 0, we conclude that _V 6 0.In order to show H1 disturbance attenuation, let us define a cost function Jð�xðtÞ;wðtÞÞ as follows:
Jð�xðtÞ;wðtÞÞ ¼ _V þ zTe ðtÞzeðtÞ � c2wTðtÞwðtÞ: ð16Þ
Substituting (15) into (16) yields
Jð�xðtÞ;wðtÞÞ ¼ _V þ zTe ðtÞzeðtÞ � c2wTðtÞwðtÞ 6 fTðtÞHfðtÞ ð17Þ
where
H ¼
RT0P þ PR0 þ Q þ aFTF þ C PR1 PR2 0 PD
I �aI 0 0 0I I �bI 0 0I I I �Q þ bFTF 0I I I I �c2I
26666664
37777775;
and
C ¼ CTC 00 0
" #:
For a constant g > 0, if the following inequality holds:
H ¼ Hþ diagfgP;0;0;0;0g < 0; ð18Þ
then, we have
Jð�xðtÞ;wðtÞÞ 6 fTðtÞHfðtÞ ¼ fTðtÞðH� diagfgP;0; 0;0;0gÞfðtÞ < �fTðtÞ � diagfgP;0;0;0;0g � fðtÞ: ð19Þ
From Eq. (19), we can easily obtain that
_V jwðtÞ¼0 < �gkminðPÞjj�xðtÞjj2 < 0; for all �xðtÞ 6¼ 0: ð20Þ
This implies that the synchronization error system (5) with the dynamic controller uðtÞ is exponentially stable for wðtÞ ¼ 0based on Lyapunov stability theory.
In order to proof the disturbance attenuation with rate c, let us integrate the function in (19) from 0 to1. Then we have
V jt!1 � V jt¼0 þZ 1
0ðjjzeðtÞjj22 � c2jjwðtÞjj22Þdt 6 0: ð21Þ
By considering that V jt¼0 ¼ 0 and V jt!1 ! 0, we have
Z 10ðjjzeðtÞjj22 � c2jjwðtÞjj22Þdt 6 0; ð22Þ
which implies that H1 synchronization with the disturbance attenuation c is obtained by the controller uðtÞ in the sense ofDefinition 1.
On the other hand, it is not easy to solve the sufficient condition (18) and find the control parameter since it is not astandard LMI form. In order to find the controller parameters Ac , Bc and Cc , which included in the matrix R0, are unknownand occur in nonlinear fashion. Thus, we will use a method of changing variables such that the inequality can be solved asconvex optimization algorithms.

174 J.H. Park et al. / Applied Mathematics and Computation 204 (2008) 170–177
First define a positive-definite matrix P 2 R2n�2n and its inverse, which plays an important role in our analysis:
P ¼S N
NT U
� �; P�1 ¼
Y M
MT W
� �: ð23Þ
where S 2 Rn�n and Y 2 Rn�n are positive definite matrices, and M 2 Rn�n and N 2 Rn�n are invertible matrices.Next, from the relationship (23), the equality P�1P ¼ I gives that
MNT ¼ I � YS: ð24Þ
Define
W1 ¼Y I
MT 0
� �; W2 ¼
I S
0 NT
� �: ð25Þ
Then, it follows that
PW1 ¼ W2;WT1PW1 ¼ WT
1W2 ¼Y I
I S
� �> 0: ð26Þ
Now, to use the concept of congruence transformation, the inequality (18) by postmultiplying and premultiplying the matrixdiagfWT
1; I; I; I; Ig and by its transpose, respectively, is equivalent to
W WT2R1 WT
2R2 0 WT2D
I �aI 0 0 0I I �bI 0 0I I I �Q þ bFTF 0I I I I �c2I
26666664
37777775 < 0; ð27Þ
where
W ¼ WT1R
T0W2 þWT
2R0W1 þWT1QW1 þ aWT
1FTFW1 þWT1CW1 þ gWT
2W1:
By matrix computation and Fact 1, it is obvious that Eq. (27) is equivalent to
H11 H12 A1 A2 0 0 D
I H22 SA1 SA2 0 0 SD
I I �aI 0 0 0 0I I I �bI 0 0 0I I I I ��I þ bFTF 0 0I I I I I �Q 0I I I I I I �c2I
2666666666664
3777777777775< 0; ð28Þ
where
H11 ¼ A0Y þ YAT0 þ BCcMT þMCT
c BT þ �YY þMQMT þ aYFTFY þ YCTCY þ gY;
H12 ¼ A0 þ ðSA0Y þ SBCcMT þ NBcY þ NAcMTÞT þ �Y þþaYFTF þ YCTC þ gI;
H22 ¼ SA0 þ AT0Sþ NBc þ BT
c NT þ �I þ aFTF þ CTC þ gS:
ð29Þ
For simplification of representation given in Eq. (28), let us define a new set of variables as follows:
bA ¼ SA0Y þ SBbC þ bBY þ NAcMT;bB ¼ NBc;bC ¼ CcMT;bD ¼ MQMT:ð30Þ
Then, the inequality (28) is equivalent to the LMI (9). Also, the LMI (10) guarantees the positiveness of the matrix P by (23)and (24). This completes the proof. h
Remark 1. Given any solution of the LMIs (9) and (10) in Theorem 1, a corresponding controller of the form (6) will be con-structed as follows:
� Compute M from solutions bD and Q using matrix algebra.� Compute the invertible matrix N satisfying (24).� Utilizing the matrices M and N obtained above, solve the system of equations (30) for Bc;Cc and Ac (in order).

J.H. Park et al. / Applied Mathematics and Computation 204 (2008) 170–177 175
Example 1. Consider a chaotic delayed Hopfield neural network as below [26]
_x1ðtÞ_x2ðtÞ
� �¼ A0
x1ðtÞx2ðtÞ
� �þ A1
f1ðx1ðtÞÞf2ðx2ðtÞÞ
� �þ A2
f1ðx1ðt � 1ÞÞf2ðx2ðt � 1ÞÞ
� �; zxðtÞ ¼ CxðtÞ ð31Þ
where fiðxiðtÞÞ ¼ tanhðxiðtÞÞ; i ¼ 1;2, h ¼ 1, and
A0 ¼�1 00 �1
� �; A1 ¼
2 �0:1�5 4:5
� �; A2 ¼
�1:5 �0:1�0:2 �4
� �; C ¼ 0:5 0½ �:
System (31) satisfies the Lipschitz condition with F ¼ I.
Then, the following response system is designed for synchronization:
_y1ðtÞ_y2ðtÞ
� �¼ A0
y1ðtÞy2ðtÞ
� �þ A1
f1ðy1ðtÞÞf2ðy2ðtÞÞ
� �þ A2
f1ðy1ðt � 1ÞÞf2ðy2ðt � 1ÞÞ
� �þ BuðtÞ þ DwðtÞ; zyðtÞ ¼ CyðtÞ ð32Þ
0 5 10 15 20—2.5
—2
—1.5
—1
—0.5
0
0.5
1
Time (sec)
e 1 (t)
e1(t)
0 5 10 15 20—10
—8
—6
—4
—2
0
2
4
6
8
10
Time (sec)
e 2 (t)
e2(t)
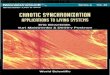
Fig. 1. The time responses of synchronization of Hopfield neural networks without disturbance signal wðtÞ.

0 5 10 15 20—0.4
—0.3
—0.2
—0.1
0
0.1
0.2
0.3
0.4
Time (sec)
Mea
sure
d ou
tput
ze(t)
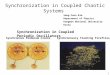
Fig. 2. The time response of the output error zeðtÞ of Hopfield neural networks with disturbance signal wðtÞ and zero initial conditions.
176 J.H. Park et al. / Applied Mathematics and Computation 204 (2008) 170–177
where wðtÞ is a Gaussian noise with mean 0 and variance 1, and
B ¼2 00 2
� �; D ¼
11
� �:
In the numerical simulations, the ODE45 method is used to solve the systems with variable step size.For the simulation, the following initial conditions are used:
ðx1ð0Þ; x2ð0ÞÞ ¼ ð0:1;�0:3Þ; ðy1ð0Þ; y2ð0ÞÞ ¼ ð�2;1Þ:
Now, in order to make synchronization between systems (31) and (32) via dynamic control law (6), let us solve the problemgiven in Theorem 1 with preselected constants g ¼ 1, a ¼ 1, � ¼ 1, and the disturbance attenuation c ¼ 0:3.
By using MATLAB’s LMI Control Toolbox [25], one can see easily that the LMIs given in Theorem 1 are feasible. By furthercomputation according to Remark 1, we have a possible stabilizing controller:
Ac ¼�96:1753 7:3436
3:2306 �188:5135
� �; Bc ¼
5:9079 �0:5682�0:2826 12:7299
� �; Cc ¼
�275:5640 1:27731:2312 �284:6613
� �; ð33Þ
which guarantees the synchronization between two Hopfield neural networks.In order to show control effort for synchronization between drive (31) and response system (32) in numerical simulation,
the control input is applied at t ¼ 10 ðsÞ. First, without disturbance signal and by applying the dynamic controller (33), thesynchronization error between drive and response systems is given in Fig. 1. It shows that the synchronization error con-verges to zero exponentially from t ¼ 10 ðsÞ. To observe the H1 performance with disturbance attenuation, the responseof the controlled output error yeðtÞ is depicted in Fig. 2. The dynamic H1 controller (33) reduces the effect of the disturbanceinput wðtÞ on the controlled output error zeðtÞ to within a prescribed level c ¼ 0:3.
4. Conclusions
The problem of H1 synchronization for a class of time-delayed chaotic systems with disturbances has been presented.Based on Lyapunov theory and LMI formulation, A dynamic feedback control scheme has proposed to guarantee synchroni-zation for drive and response systems and reduce the H1-norm from the disturbance input to the output error within a pre-scribed level. Furthermore, a model of Hopfield neural network is given to illustrate the effectiveness of the proposed controlscheme.
References
[1] H. Fujisaka, T. Yamada, Progr. Theor. Phys. 69 (1983) 32.[2] L.M. Pecora, T.L. Carroll, Phys. Rev. Lett. 64 (1990) 821.[3] P.K. Das, W.C. Schieve, Z. Zeng, Phys. Lett. A 161 (1991) 60.

J.H. Park et al. / Applied Mathematics and Computation 204 (2008) 170–177 177
[4] G. Chen, X. Dong, From Chaos to Order: Methodologies, Perspectives and Applications, World Scientific, Singapore, 1998.[5] V. Perez-Munuzuri, V. Perez-Villar, L.O. Chua, IEEE Trans. Circ. Syst. I 40 (1993) 174.[6] E. Ott, C. Grebogi, J.A. Yorke, Phys. Rev. Lett. 64 (1990) 1196.[7] C.C. Wang, J.P. Su, Chaos, Solitons Fractals 20 (2004) 967.[8] X.S. Yang, G. Chen, Chaos, Solitons Fractals 13 (2002) 1303.[9] Ju H. Park, O.M. Kwon, Chaos, Solitons Fractals 23 (2005) 445.
[10] X. Wu, J. Lu, Chaos, Solitons Fractals 18 (2003) 721.[11] Ju H. Park, S.M. Lee, O.M. Kwon, Phys. Lett. A 371 (2007) 263.[12] Ju H. Park, Int. J. Nonlinear Sci. Numer. Simul. 6 (2005) 201.[13] Ju H. Park, Chaos Solitons Fractals 25 (2005) 579.[14] Ju H. Park, Chaos Solitons Fractals 23 (2005) 1319.[15] Ju H. Park, S.M. Lee, O.M. Kwon, Chaos Solitons Fractals 30 (2007) 271.[16] Yi-You Hou, Teh-Lu Liao, Jun-Juh Yan, Phyisca A 379 (2007) 81.[17] S. Anton, The H1 Control Problem, Prentice-Hall, New York, 1992.[18] L. Zhang, B. Huang, J. Lam, IEEE Trans. Circ. Syst. 50 (2003) 615.[19] M. Mackey, L. Glass, Science 197 (1977) 287.[20] Y. Tian, F. Gao, Physica D 117 (1998) 1.[21] J. Farmer, Physica D 4 (1882) 366.[22] W. Zhu, D. Xu, Y. Huang, Chaos, Solitons Fractals 35 (2008) 904.[23] H. Peng, L. Li, Y. Yang, X. Zhang, Chaos, Solitons Fractals, doi:10.1016/j.chaos.2007.09.025, in press.[24] J. Cao, P. Li, W. Wang, Phys. Lett. A 353 (2006) 318.[25] S. Boyd, L.E. Ghaoui, E. Feron, V. Balakrishnan, Linear Matrix Inequalities in System and Control Theory, SIAM, Philadelphia, 1994.[26] H.T. Lu, Phys. Lett. A 298 (2002) 109.