Embed Size (px)
Citation preview

Research ArticleSynchronization of Discrete-Time Chaotic Fuzzy Systems bymeans of Fuzzy Output Regulation Using Genetic Algorithm
Tonatiuh Hernaacutendez Corteacutes1 A Veroacutenica Curtidor Loacutepez1 Jorge Rodriacuteguez Valdez1
Jesuacutes A Meda Campantildea1 Ricardo Tapia Herrera1 and Joseacute de Jesuacutes Rubio2
1 Instituto Politecnico Nacional SEPI-ESIME Zacatenco Avenida IPN SN 07738 Mexico DF Mexico2Instituto Politecnico Nacional SEPI-ESIME Azcapotzalco Avenida de las Granjas No 68202250 Azcapotzalco Mexico DF Mexico
Correspondence should be addressed to Tonatiuh Hernandez Cortes tona hernandyahoocommx
Received 7 August 2015 Accepted 4 November 2015
Academic Editor Rongwei Guo
Copyright copy 2015 Tonatiuh Hernandez Cortes et al This is an open access article distributed under the Creative CommonsAttribution License which permits unrestricted use distribution and reproduction in any medium provided the original work isproperly cited
The synchronization of chaotic systems described by discrete-time T-S fuzzymodels is treated bymeans of fuzzy output regulationtheory The conditions for designing a discrete-time output regulator are given in this paper Besides when the system does notfulfill the conditions for exact tracking a new regulator based on genetic algorithms is considered The genetic algorithms areused to approximate the adequate membership functions which allow the adequate combination of local regulators As a resultthe tracking error is significantly reduced Both the Complete Synchronization and the Generalized Synchronization problem arestudied Some numerical examples are used to illustrate the effectiveness of the proposed approach
1 Introduction
A special nonlinear dynamical phenomenon known aschaos emerged in mid-1960s and reached applicable tech-nology in the late 1990s and was considered as one ofthe three monumental discoveries of the twentieth centuryOn the other hand fuzzy logic a set theory and thenan infinite-valued logic gets a wide applicability in manyindustrial commercial and technical fields ranging fromcontrol automation and artificial intelligence just to namea few Fuzzy logic and chaos had been considered by manyresearches and engineers as fundamental concepts and the-ories and their broad applicability in technology as well Theinteraction between fuzzy logic and chaos has been developedfor the last 20 years leading to research topics as fuzzymodeling of chaotic systems using Takagi-Sugeno modelslinguistic descriptions of chaotic systems fuzzy control ofchaos synchronization and a combination of fuzzy chaos forengineering applications [1 2]
In the 1960s Rechenberg [3] introduced ldquoevolutionstrategiesrdquo a method to optimize real-valued parameters for
devices such as airfoils This idea was further developedby Schwefel in [4] Genetic algorithms (GAs) were initiallydeveloped by Bremermann [5] in 1958 but popularized anddeveloped byHolland in the 1960s In contrast with evolutionstrategies and evolutionary programming Hollandrsquos ideawas not to design algorithms to solve specific problems butrather to formally study the phenomenon of adaptation as itoccurs in nature and develop ways in which the mechanismsof natural adaptation might be transferred into computersystems [6]The genetic algorithm is presented as abstractionof biological evolution and theoretical framework for adapta-tion formoving from one population of ldquochromosomesrdquo (egstrings of ones and zeros or ldquobitsrdquo) to a new population byusing a kind of ldquonatural selectionrdquo together with the genetics-inspired operators of crossover mutation and inversionEach chromosome consists of ldquogenesrdquo (eg bits) each geneis being an instance of a particular ldquoallelerdquo (eg 0 or 1)The operator selection chooses those chromosomes in thepopulation that will be allowed to reproduce and thoseadjusted chromosomes produce more offspring than the lessones [7]
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 198371 18 pageshttpdxdoiorg1011552015198371
2 Mathematical Problems in Engineering
According to Fogel and Aderson [8] Bremermann wasthe first to implement real-coded genetic algorithms as wellas providing a mathematic model of GA known as the one-max function In contrast to genetic algorithms EvolutionaryStrategies were initially developed for the purpose of param-eter optimization The idea was to imitate the principles oforganic evolution in experimental parameter optimizationfor applications such as pipe bending or PID control for anonlinear system [9]
Synchronization of chaotic systems is one of the moreexiting problems in control science and can be referred atleast to Huygenrsquos observations [10] it is understood as one ofthe trajectories of two autonomous chaotic systems startingfrom nearly initial conditions and converging to the otherand remains as 119905 rarr infin in [11] it was reported that some kindof chaotic systems possesses a self-synchronization propertyHowever not all chaotic systems can be decomposed intwo separate responses subsystems and be able to synchro-nize the drive system The ideas of these works have ledto improvement in many fields such as communications[12] encrypted systems the complex information processingwithin the human brain coupled biochemical reactors andearthquake engineering [13]
Synchronization can be classified as follows CompleteSynchronization it is when two identical chaos oscillators aremutually coupled and one drives to the other GeneralizedSynchronization it differs from the previous case by the factthat there are different chaos oscillators and the states of oneare completely defined by the other Phase Synchronization itoccurswhen the coupled oscillators are not identical and havedifferent amplitude that is still unsynchronized while thephases of oscillators evolve to be synchronized [14] It is worthmentioning that studies in synchronization of nonlinearsystems have been reformulated based on the previous resultsfrom classical control theory such as [15ndash18]
In this paper the fuzzy output regulation theory andTakagi-Sugeno (T-S) fuzzy models are used to solve theComplete and Generalized Synchronization by using linearlocal regulators Isidori and Byrnes [19] showed that theoutput regulation established by Francis could be extendedfor a nonlinear sector as a general case resulting in a set ofnonlinear partial differential equations called Francis-Isidori-Byrnes (FIB) Unfortunately these equations in many casesare too difficult to solve in a practical manner For this reasonin [20] the approach based on the weighted summationof local linear regulators is presented and in [21] the newmembership functions in the regulator are approximated bysoft computing techniques
So the main contribution of the present work is to finda control law for synchronizing of chaotic systems describedby discrete-time Takagi-Sugeno fuzzy models first when thesystem fulfills the following (1) the input matrix for allsubsystems is the same and (2) the local regulators sharethe same zero error manifold 120587(119908119896) In this way the resultsgiven in [20] are extended to the discrete-time domain Onthe other hand when the systemmaster-slave does not fulfillthe aforementioned conditions new membership functionsare computed in order to enhance the performance of thefuzzy regulator Such proposed membership functions are
different from those given in the plant or exosystem and aretuned by using the GA The tuning of the new membershipfunctions which is as generalized bell-shaped function isgiven by optimization of the form parameter
The rest of the paper is organized as follows In Section 2the discrete-time output regulation problem formulationis given with a brief review of the Takagi-Sugeno modelsand the discrete-time fuzzy regulation problem In Section 3the tuning of membership functions by means of GAs isthoroughly discussed In Section 4 Complete and General-ized Synchronization with some examples are presented andfinally in Section 5 some conclusions are drawn
2 The Discrete-Time Fuzzy OutputRegulation Problem
Consider a nonlinear discrete-time system defined by
119909119896+1 = 119891 (119909119896 120596119896 119906119896) (1)
119910119896 = 119888 (119909119896) (2)
120596119896+1 = 119904 (120596119896) (3)
119910ref119896 = 119902 (120596119896) (4)
119890119896 = ℎ (119909119896 120596119896) (5)
where 119909119896 isin R119899 is the state vector of the plant 119908119896 isin 119882 sub
R119904 is the state vector of the exosystem which generates thereference andor the perturbation signals and 119906119896 isin R119898 isthe input signal Equation (5) refers to difference betweenoutput system of the plant (119910119896 isin R119898) and the reference signal(119910ref 119896 isin R119898) that is ℎ(119909119896 120596119896) = 119910119896 minus 119910ref 119896 = 119888(119909119896) minus 119902(119908119896)
and take into account that 119898 le 119899 Besides it is assumed that119891(119909119896 119906119896 119908119896) ℎ(119909119896 119908119896) and 119904(119908119896) are analytical functionsand also that 119891(0 0 0) = 0 119904(0) = 0 and ℎ(0 0) = 0 [22]
Clearly by linearizing (1)ndash(5) around 119909119896 = 0 one gets
119909119896+1 = 119860119909119896 + 119861119906119896 + 119875119908119896
119910119896 = 119862119909119896
119908119896+1 = 119878119908119896
119910ref119896 = 119876119908119896
119890119896 = 119862119909119896 minus 119876119908119896
(6)
Thus the Nonlinear Regulator Problem [19 23] consists offinding a controller 119906119896 = 120572(119909119896 119908119896) such that the closed-loopsystem 119909119896+1 = 119860119909119896 + 119861120572(119909119896 0) has an asymptotically stableequilibrium point and the solution of system (6) satisfieslim119896rarrinfin119890119896 = 0
So by defining 120587(119908119896) as the steady-state zero errormanifold and 120574(119908119896) as the steady-state input the followingtheorem gives the conditions for the solution of nonlinearregulation problem
Theorem 1 Suppose that 119908119896+1 = 119904(119908119896) is Poisson stable andthere exists a gain119870 such that the matrix 119860+119861119870 is stable and
Mathematical Problems in Engineering 3
there exist mappings 119909119904119904(119905) = 120587(119908119896) and 119906119904119904 = 120574(119908119896) with120587(0) = 0 and 120574(0) = 0 satisfying
120587 (119904 (119908119896)) = 119891 (120587 (119908119896) 119908119896 120574 (119908119896))
0 = ℎ (120587 (119908119896) 119908119896)
(7)
Then the control signal for the nonlinear regulation is given by
119906119896 = 119870 (119909119896 minus 120587 (119908119896)) + 120574 (119908119896) (8)
Proof See [22ndash24]
The equation set (7) is known as Discrete-Time Francis-Isidori-Byrnes (DTFIB) equations and linear counterpart isobtained when the mappings 119909119904119904119896 = 120587(119908119896) and 119906119904119904119896 = 120574(119908119896)
transform into 119909119904119904119896 = Π119908119896 and 119906119904119904119896 = Γ119908119896 respectivelyThus the problem is reduced to solve linear matrix equations[25] given by
Π119878 = 119860Π + 119861Γ + 119875
0 = 119862Π minus 119876
(9)
21 The Discrete-Time Output Fuzzy Regulation ProblemTakagi and Sugeno proposed a fuzzy model composed ofa set of linear subsystems with IF-THEN rules capable ofrelating physical knowledge linguistic characteristics andproperties of the system Such amodel successfully representsa nonlinear system at least in a predefined region of phasespace [15] The T-S model for the plant and exosystem can bedescribed as follows [26]
Plant Model
Rule 119894IF 11991111119896 is119872
119894
11and and 1199111119901
1119896 is119872
119894
11199011
THEN
119909119896+1 = 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119910119896 = 119862119894119909119896
119894 = 1 2 1199031
(10)
where 1199031 is the number of rules in the model of theplant and the sets119872119894
1119895are the fuzzy sets defined based
on the previous dynamic knowledge of the system
Exosystem Model
Rule 119894IF 11991121119896 is119872
119894
21and and 1199112119901
2119896 is119872
119894
21199012
THEN
119908119896+1 = 119878119894119908119896
119910ref 119896 = Q119894119908119896119894 = 1 2 1199032 (11)
where 1199032 is the number of rules in the model of theexosystem and119872
119894
2119895are the fuzzy sets
Then the regulation problem defined by (1)ndash(5) can berepresented through the T-S discrete-time fuzzy model thatis [20]
119909119896+1 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119878119894119908119896
119890119896 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119862119894119909119896 minus
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119876119894119908119896
(12)
where 119909119896 isin R119899 is the state vector of the plant 119908119896 isin R119904 isthe state vector of the exosystem 119906119896 isin R119898 is the input signal119890119896 isin R119898 and ℎlowast119894(119911) is the normalized weight of each rule 1for the plant and 2 for the exosystem which depends on themembership function for the premise variable 119911lowast119896 in 119872
119894
lowast119895
that is
120596lowast119894 (119911lowast119896) =
119901lowast
prod
119895=1
119872119894
lowast119895(119911lowast119895119896)
ℎlowast119894 (119911lowast119896) =
120596lowast119894 (119911lowast119896)
sum119903lowast
119894=1120596lowast119894 (119911lowast119896)
119903lowast
sum
119894=1
ℎlowast119894 (119911lowast119896) = 1
ℎlowast119894 (119911lowast119896) ge 0
(13)
with 119911lowast119896 = [119911lowast1119896 119911lowast2119896 sdot sdot sdot 119911lowast119901lowast119896] as a function of 119909119896
andor 119908119896 119894 = 1 119903lowast and 119895 = 1 119901The discrete-time fuzzy output regulation problem consists
of finding a controller 119906119896 = 120572(119909119896 119908119896) such that the closed-loop system with no external signal
119909119896+1 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894119909119896 + 119861119894120572 (119909119896 0) (14)
has an asymptotically stable equilibrium pointThe solution of system (12) satisfies
lim119896rarrinfin
119890119896 = 0 (15)
In order to achieve the synchronization of chaotic systemsdescribed by a T-S discrete-time fuzzy model it is necessaryto fulfill (7) [27 28] Then
120587 (119904 (119908119896))
=
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894120587 (119908119896) + 119861119894120574 (119908119896) + 119875119894119908119896
(16)
0 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119862119894120587 (119908119896) minus
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119876119894119908119896 (17)
4 Mathematical Problems in Engineering
where 120587(119908119896) is the zero error steady-state manifold whichbecomes invariant by the effect of the steady-state input120574(119908119896)
Assuming the mappings 120587(119908119896) and 120574(119908119896) as
(119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896)Π119894119895119908119896 (18)
120574 (119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896) Γ119894119895119908119896 (19)
respectively withΠ119894119895 and Γ119894119895 as a solution of 1199031 sdot 1199032 lineal localproblems
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894 (20)
0 = 119862119894Π119894119895 minus 119876119894 (21)
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following control lawcan be obtained [20 22 23]
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)
sdot 119870119894[
[
119909119896 minus
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896)Π119894119895119908119896]
]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(22)
However by substitution of 120587(119908119896) and 120574(119908119896) in (16) and (17)and considering
(1) the steady-state zero error manifold 120587(119908119896) = Π119908119896that is Π119894119895 = Π
(2) the input matrices 119861119894 = 119861 andor Γ119894119895 = Γ
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following controlsignal 119906119896 emerges
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(23)
On the other hand the existence of a fuzzy stabilizer of theform 119906 = sum
1199031
119894=1ℎ1119894(1199111119896)119870119894119909119896 ensuring that the tracking error
converges asymptotically to zero can be obtained from theParallel Distributed Compensator (PDC) [29 30] or anotherstability analysis for T-S fuzzy models such as [31]
Remark 2 The control signal in (22) is given by the substitu-tion of (18) and (19) in (16) and (17) the proposed controllerprovides the following advantages
(1) All parameters included in the controller are knownthis includes the membership functions of the plantand exosystemwhich arewell defined in theT-S fuzzymodel
On the other hand Π119894119895 and Γ119894119895 come directly fromsolving of 1199031 lowast 1199032 local linear problems equivalentto solving the Francis equations such problems canbe easily solved by using programs like Matlab orMathematica
(2) In the case when the 1199031 lowast 1199032 local linear problems leadto Π119894119895 = Π then at least a bounded error is ensured
(3) It is clear that when Π119894119895 = Π the termsum1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Π119894119895119908119896 changes to Π119908119896
leading to controller defined in (23)(4) The following condition the input matrices 119861119894 =
119861 andor Γ119894119895 = Γ avoids the crossed terms in thesolutions of (16) and (17) allowing the exact fuzzyoutput regulation
(5) The proposed controller can be seen as a simplesubstitution of the aforementioned elements
On the other hand the following disadvantages canappear
(1) If the condition is that the steady-state zero errormanifold 120587(119908119896) = Π119908119896 that is Π119894119895 = Π then it willbe necessary to adjust the local regulator by means ofnew membership functions Please refer to Section 3
(2) As expected the complexity of the controllerincreases according to the number of localsubsystems
The following theorem provides the conditions for theexistence of the exact fuzzy output regulator for a discrete-time T-S fuzzy models
Theorem 3 The exact fuzzy output regulation with fullinformation of systems defined as (12) is solvable if (a) thereexists the same zero error steady-state manifold 120587(119908119896) = Π(b) there exist 119906119896 = sum
1199031
119894=1ℎ119894119896(1199111119896)119870119894119909119896 for the fuzzy system
(c) the exosystem 120596119896+1 = 119904(120596119896) is Poisson stable and the inputmatrices for all subsystems 119861119894 are equal Moreover the ExactOutput Fuzzy Regulation Problem is solvable by the controller
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(24)
Proof From the previous analysis the existence of mappings120587(119908119896) = Π119908119896 and 120574(119908119896) = sum
1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Γ119894119895119908119896
is guaranteed when the input matrices for all subsystems 119861119894are equal and the solution of 1199031 sdot 1199032 lineal local problems is
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894
0 = 119862119894Π119894119895 minus 119876119894
(25)
leading to Π119894119895 = Π for all 119894 = 1 1199031 and 119895 = 1 1199032On the other hand the inclusion of condition (b) has been
thoroughly discussed in [22 23 27 28 31ndash33] and it impliesthe existence of a fuzzy stabilizer
Mathematical Problems in Engineering 5
Condition (c) ensures the nonexistence of crossed termsin the local Francis equations Finally condition (d) is intro-duced to avoid the fact that the reference signal converges tozero which would turn the regulation problem into a simplestability problem The rest of the proof follows directly fromthe previous analysis
3 The Output Regulator by means ofLocal Regulators and Tuning of NewMembership Functions
In this section a discrete-time T-S fuzzy model is consideredto solve the exact output regulation on the basis of linearlocal controllers So the main goal is to find a completeregulator based on the fuzzy summation of local regulatorsusing adequate membership functions such that the resultgiven in Theorem 3 can be relaxed [34] These membershipfunctions are not necessarily the same included in the fuzzyplant as is described in (19) Thus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896)
1199032
sum
119895=1
1205832119895 (1199112119896) Γ119894119895119908119896 (26)
where 1205831119894(1199111119896) and 1205832119895(1199112119896) are new membership func-tions such that the fuzzy output regulator obtained fromlocal regulators provides the exact fuzzy output regulationThis approach requires the computation of the linear localcontrollers and the computation of the new membershipfunctions In this work such functions are represented by thefollowing expression
1205831119894 (119909119896) =1
1 +1003816100381610038161003816(119909119896 minus 119888119894) 119886119894
1003816100381610038161003816
2119887119894
forall119894 = 1 1199031 (27)
1205832119895 (119908119896) =1
1 +10038161003816100381610038161003816(119908119896 minus 119888119895) 119886119895
10038161003816100381610038161003816
2119887119895
forall119895 = 1 1199032 (28)
1205831119894 and 1205832119895 are well known as generalized bell-shaped mem-bership functions and the parameters 119886119894 119886119895 119887119894 119887119895 119888119894 and119888119895 determine the form center and amplitude respectivelyTherefore from (22) the input can be defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896)
+
1199031
sum
119894=1
1205831119894 (119908119896)
1199032
sum
119895=1
1205832119895 (119908119896) Γ119894119895119908119896
(29)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)Then for tuning themembership functions (27) and (28)
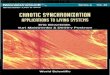
the parameters 119886119894 and 119886119895will be optimized bymeans of geneticalgorithms ensuring the correct interpolation between thelocal linear regulators The foregoing can be summarized inthe control scheme depicted in Figure 1
To this end the following algorithm should be carried out
Algorithm 4 Main steps to take into account to solve thetuning membership functions problem are as follows [35]
(1) Start with a randomly generated population of nl-bitchromosomes (candidate solutions to a problem)Thetraditional representation is binary as in Figure 2A binary string is called ldquochromosomerdquo Each positiontherein is called ldquogenerdquo and the value in this positionis named ldquoallelerdquo
(2) Calculate the fitness 119891(119909) of each chromosome 119909 inthe population
(3) Repeat the following steps until n offspring have beencreated
(i) Select a pair of parent chromosomes from thecurrent population the probability of selectionbeing an increasing function of fitness Selectionis done ldquowith replacementrdquo meaning that thesame chromosome can be selected more thanonce to become a parent
(ii) With probability 119901119888 (the ldquocrossover probabil-ityrdquo or ldquocrossover raterdquo) crossover the pair ata randomly chosen point (chosen with uni-form probability) to form two offspring If nocrossover takes place form two offspring thatare exact copies of their respective parents(Note that here the crossover rate is defined to bethe probability that two parents will cross overin a single point)
(iii) Mutate the two offspring at each locus withprobability 119901119898 (the mutation probability ormutation rate) and place the resulting chromo-somes in the new population
(4) Replace the current population with the new popula-tion
(5) Go to step (2)
This process ends when the fitness function reaches avalue less than or equal to a predefined bound or when themaximum number of iterations is reached Each iteration ofthis process is called a generation
In order to apply a genetic algorithm it requires thefollowing five basic components
(i) A representation of the potential solutions to theproblem
(ii) One way to create an initial population of possiblesolutions (typically a random process)
(iii) An evaluation function to play the role of the environ-ment classifying the solutions in terms of its ldquofitnessrdquo
(iv) Genetic operators that alter the composition of thechromosomes that will be produced for generations
(v) Values for the various parameters used by the geneticalgorithm (population size crossover probabilitymutation probability maximum number of genera-tions etc)
6 Mathematical Problems in Engineering
Fuzzy exosystemFuzzy plant
Fuzzy controller
Regulator
Stabilizer
Bell-shaped mf rsquos
eGenetic algorithm
uk yk wk
xk
+
+
+
minus
ai bi ci
aj bj cj
(ai aj)
yrefk
r1
sumi=1
h1i(xk)ki xk minus 120587(wk)
r1
sumi=1
1205831i(wk)r2
sumj=1
1205832j(wk)Γijwk
1205831i(wk) =1
1 + (xk minus ci) ai i2b| |
1205832j(wk) =1
1 + (wk minus cj) aj 2bj| |
Figure 1 Control scheme for fuzzy output regulation and genetic algorithms
0 1 1 0 1 1 0 1 0 0 1 1 1 0 0 1
String 1 String 2 String 3 String 4
Figure 2 Binary string commonly used in genetic algorithms
The aforementioned can be summarized by the flowchartdepicted in Figure 3
4 Synchronization of T-S Discrete-TimeFuzzy Systems
The stabilization and synchronization of chaotic systems aretwo of the most challenging and stimulating problems dueto their capabilities of describing a great variety of veryinteresting phenomena in physics biology chemistry andengineering to name a few In this section the regulationtheory is used to synchronize chaotic systems described by T-S discrete-time fuzzy models Both the drive system and theresponse system are modeled by the same attractor (Rosslerrsquosequation) with the difference that response system can beinfluenced by an input signal This type of synchronizationis known as Complete Synchronization (CS) [36]
Considering two Rossler chaotic oscillators as = 119891(119908)
(drive system) and = 119891(119909 119908 119906) (response system) theordinary differential equations of these systems are
1 = minus (1199082 + 1199083)
2 = 1199081 + 1198861199082
3 = 1198871199081 minus (119888 minus 1199081) 1199083
Rossler attractor
Drive system
1 = minus (1199092 + 1199093)
2 = 1199091 + 1198861199092
3 = 1198871199091 minus (119888 minus 1199091) 1199093 + 119906
Rossler attractor
Response system
(30)
According to [15] these systems can be exactly repre-sented by means of the following two-rule T-S fuzzy modelswhen 119886 119887 and 119888 are constants and 1199091 isin [119888 minus 119889 119888 + 119889] with119889 gt 0 Thus
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(31)
Mathematical Problems in Engineering 7
Begin
Random initial population
Individual performance evaluation
Reproduction Crossover Mutation
Anothergeneration
Membership functions performance
End
Yes
No
GA
Chromosome selection for reproduction
e s=
1 2(x
1kminusw1k)2
Obj
ectiv
e fun
ctio
n
Figure 3 Flowchart of genetic algorithms
where
1198601 =[[
[
0 minus1 minus1
1 119886 0
119887 0 minus119889
]]
]
1198781 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 minus119889119908
]]
]
1198602 =[[
[
0 minus1 minus1
1 119886 0
119887 0 119889
]]
]
1198782 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 119889119908
]]
]
1198611 = 1198612 = [0 0 1]119879
119862119894 = 119876119894 = [1 0 0]
(32)
Besides the membership functions for such systems are
ℎ11 (1199091) =1
2(1 +
119888 minus 1199091
119889)
ℎ12 (1199091) =1
2(1 minus
119888 minus 1199091
119889)
ℎ21 (1199081) =1
2(1 +
119888 minus 1199081
119889)
ℎ22 (1199081) =1
2(1 minus
119888 minus 1199081
119889)
(33)
Now the continuous-time T-S fuzzy model can be convertedto the following discrete counterpart by using [1]
119866119894 = exp (119860 119894119879119904) = 119868 + 119860 119894119879119904 + 1198602
119894
1198792
119904
2+ sdot sdot sdot
119867119894 = int
119879119904
0
exp (119860 119894120591) 119861i119889120591 = (119866119894 minus 119868)119860minus1
119894119861119894
(34)
Therefore the discrete-time T-S fuzzy model is given by
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(35)
where
1198601 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 1 minus 119889119879119904
]]
]
1198781 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 1 minus 119889119908119879119904
]]
]
1198602 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 119879119904119889 + 1
]]
]
1198782 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 119889119908119879119904 + 1
]]
]
1198611 = 1198612 = [0 0 119879119904]119879
119862119894 = 119876119894 = [1 0 0]
(36)
8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
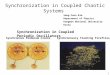
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
According to Fogel and Aderson [8] Bremermann wasthe first to implement real-coded genetic algorithms as wellas providing a mathematic model of GA known as the one-max function In contrast to genetic algorithms EvolutionaryStrategies were initially developed for the purpose of param-eter optimization The idea was to imitate the principles oforganic evolution in experimental parameter optimizationfor applications such as pipe bending or PID control for anonlinear system [9]
Synchronization of chaotic systems is one of the moreexiting problems in control science and can be referred atleast to Huygenrsquos observations [10] it is understood as one ofthe trajectories of two autonomous chaotic systems startingfrom nearly initial conditions and converging to the otherand remains as 119905 rarr infin in [11] it was reported that some kindof chaotic systems possesses a self-synchronization propertyHowever not all chaotic systems can be decomposed intwo separate responses subsystems and be able to synchro-nize the drive system The ideas of these works have ledto improvement in many fields such as communications[12] encrypted systems the complex information processingwithin the human brain coupled biochemical reactors andearthquake engineering [13]
Synchronization can be classified as follows CompleteSynchronization it is when two identical chaos oscillators aremutually coupled and one drives to the other GeneralizedSynchronization it differs from the previous case by the factthat there are different chaos oscillators and the states of oneare completely defined by the other Phase Synchronization itoccurswhen the coupled oscillators are not identical and havedifferent amplitude that is still unsynchronized while thephases of oscillators evolve to be synchronized [14] It is worthmentioning that studies in synchronization of nonlinearsystems have been reformulated based on the previous resultsfrom classical control theory such as [15ndash18]
In this paper the fuzzy output regulation theory andTakagi-Sugeno (T-S) fuzzy models are used to solve theComplete and Generalized Synchronization by using linearlocal regulators Isidori and Byrnes [19] showed that theoutput regulation established by Francis could be extendedfor a nonlinear sector as a general case resulting in a set ofnonlinear partial differential equations called Francis-Isidori-Byrnes (FIB) Unfortunately these equations in many casesare too difficult to solve in a practical manner For this reasonin [20] the approach based on the weighted summationof local linear regulators is presented and in [21] the newmembership functions in the regulator are approximated bysoft computing techniques
So the main contribution of the present work is to finda control law for synchronizing of chaotic systems describedby discrete-time Takagi-Sugeno fuzzy models first when thesystem fulfills the following (1) the input matrix for allsubsystems is the same and (2) the local regulators sharethe same zero error manifold 120587(119908119896) In this way the resultsgiven in [20] are extended to the discrete-time domain Onthe other hand when the systemmaster-slave does not fulfillthe aforementioned conditions new membership functionsare computed in order to enhance the performance of thefuzzy regulator Such proposed membership functions are
different from those given in the plant or exosystem and aretuned by using the GA The tuning of the new membershipfunctions which is as generalized bell-shaped function isgiven by optimization of the form parameter
The rest of the paper is organized as follows In Section 2the discrete-time output regulation problem formulationis given with a brief review of the Takagi-Sugeno modelsand the discrete-time fuzzy regulation problem In Section 3the tuning of membership functions by means of GAs isthoroughly discussed In Section 4 Complete and General-ized Synchronization with some examples are presented andfinally in Section 5 some conclusions are drawn
2 The Discrete-Time Fuzzy OutputRegulation Problem
Consider a nonlinear discrete-time system defined by
119909119896+1 = 119891 (119909119896 120596119896 119906119896) (1)
119910119896 = 119888 (119909119896) (2)
120596119896+1 = 119904 (120596119896) (3)
119910ref119896 = 119902 (120596119896) (4)
119890119896 = ℎ (119909119896 120596119896) (5)
where 119909119896 isin R119899 is the state vector of the plant 119908119896 isin 119882 sub
R119904 is the state vector of the exosystem which generates thereference andor the perturbation signals and 119906119896 isin R119898 isthe input signal Equation (5) refers to difference betweenoutput system of the plant (119910119896 isin R119898) and the reference signal(119910ref 119896 isin R119898) that is ℎ(119909119896 120596119896) = 119910119896 minus 119910ref 119896 = 119888(119909119896) minus 119902(119908119896)
and take into account that 119898 le 119899 Besides it is assumed that119891(119909119896 119906119896 119908119896) ℎ(119909119896 119908119896) and 119904(119908119896) are analytical functionsand also that 119891(0 0 0) = 0 119904(0) = 0 and ℎ(0 0) = 0 [22]
Clearly by linearizing (1)ndash(5) around 119909119896 = 0 one gets
119909119896+1 = 119860119909119896 + 119861119906119896 + 119875119908119896
119910119896 = 119862119909119896
119908119896+1 = 119878119908119896
119910ref119896 = 119876119908119896
119890119896 = 119862119909119896 minus 119876119908119896
(6)
Thus the Nonlinear Regulator Problem [19 23] consists offinding a controller 119906119896 = 120572(119909119896 119908119896) such that the closed-loopsystem 119909119896+1 = 119860119909119896 + 119861120572(119909119896 0) has an asymptotically stableequilibrium point and the solution of system (6) satisfieslim119896rarrinfin119890119896 = 0
So by defining 120587(119908119896) as the steady-state zero errormanifold and 120574(119908119896) as the steady-state input the followingtheorem gives the conditions for the solution of nonlinearregulation problem
Theorem 1 Suppose that 119908119896+1 = 119904(119908119896) is Poisson stable andthere exists a gain119870 such that the matrix 119860+119861119870 is stable and
Mathematical Problems in Engineering 3
there exist mappings 119909119904119904(119905) = 120587(119908119896) and 119906119904119904 = 120574(119908119896) with120587(0) = 0 and 120574(0) = 0 satisfying
120587 (119904 (119908119896)) = 119891 (120587 (119908119896) 119908119896 120574 (119908119896))
0 = ℎ (120587 (119908119896) 119908119896)
(7)
Then the control signal for the nonlinear regulation is given by
119906119896 = 119870 (119909119896 minus 120587 (119908119896)) + 120574 (119908119896) (8)
Proof See [22ndash24]
The equation set (7) is known as Discrete-Time Francis-Isidori-Byrnes (DTFIB) equations and linear counterpart isobtained when the mappings 119909119904119904119896 = 120587(119908119896) and 119906119904119904119896 = 120574(119908119896)
transform into 119909119904119904119896 = Π119908119896 and 119906119904119904119896 = Γ119908119896 respectivelyThus the problem is reduced to solve linear matrix equations[25] given by
Π119878 = 119860Π + 119861Γ + 119875
0 = 119862Π minus 119876
(9)
21 The Discrete-Time Output Fuzzy Regulation ProblemTakagi and Sugeno proposed a fuzzy model composed ofa set of linear subsystems with IF-THEN rules capable ofrelating physical knowledge linguistic characteristics andproperties of the system Such amodel successfully representsa nonlinear system at least in a predefined region of phasespace [15] The T-S model for the plant and exosystem can bedescribed as follows [26]
Plant Model
Rule 119894IF 11991111119896 is119872
119894
11and and 1199111119901
1119896 is119872
119894
11199011
THEN
119909119896+1 = 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119910119896 = 119862119894119909119896
119894 = 1 2 1199031
(10)
where 1199031 is the number of rules in the model of theplant and the sets119872119894
1119895are the fuzzy sets defined based
on the previous dynamic knowledge of the system
Exosystem Model
Rule 119894IF 11991121119896 is119872
119894
21and and 1199112119901
2119896 is119872
119894
21199012
THEN
119908119896+1 = 119878119894119908119896
119910ref 119896 = Q119894119908119896119894 = 1 2 1199032 (11)
where 1199032 is the number of rules in the model of theexosystem and119872
119894
2119895are the fuzzy sets
Then the regulation problem defined by (1)ndash(5) can berepresented through the T-S discrete-time fuzzy model thatis [20]
119909119896+1 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119878119894119908119896
119890119896 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119862119894119909119896 minus
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119876119894119908119896
(12)
where 119909119896 isin R119899 is the state vector of the plant 119908119896 isin R119904 isthe state vector of the exosystem 119906119896 isin R119898 is the input signal119890119896 isin R119898 and ℎlowast119894(119911) is the normalized weight of each rule 1for the plant and 2 for the exosystem which depends on themembership function for the premise variable 119911lowast119896 in 119872
119894
lowast119895
that is
120596lowast119894 (119911lowast119896) =
119901lowast
prod
119895=1
119872119894
lowast119895(119911lowast119895119896)
ℎlowast119894 (119911lowast119896) =
120596lowast119894 (119911lowast119896)
sum119903lowast
119894=1120596lowast119894 (119911lowast119896)
119903lowast
sum
119894=1
ℎlowast119894 (119911lowast119896) = 1
ℎlowast119894 (119911lowast119896) ge 0
(13)
with 119911lowast119896 = [119911lowast1119896 119911lowast2119896 sdot sdot sdot 119911lowast119901lowast119896] as a function of 119909119896
andor 119908119896 119894 = 1 119903lowast and 119895 = 1 119901The discrete-time fuzzy output regulation problem consists
of finding a controller 119906119896 = 120572(119909119896 119908119896) such that the closed-loop system with no external signal
119909119896+1 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894119909119896 + 119861119894120572 (119909119896 0) (14)
has an asymptotically stable equilibrium pointThe solution of system (12) satisfies
lim119896rarrinfin
119890119896 = 0 (15)
In order to achieve the synchronization of chaotic systemsdescribed by a T-S discrete-time fuzzy model it is necessaryto fulfill (7) [27 28] Then
120587 (119904 (119908119896))
=
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894120587 (119908119896) + 119861119894120574 (119908119896) + 119875119894119908119896
(16)
0 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119862119894120587 (119908119896) minus
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119876119894119908119896 (17)
4 Mathematical Problems in Engineering
where 120587(119908119896) is the zero error steady-state manifold whichbecomes invariant by the effect of the steady-state input120574(119908119896)
Assuming the mappings 120587(119908119896) and 120574(119908119896) as
(119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896)Π119894119895119908119896 (18)
120574 (119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896) Γ119894119895119908119896 (19)
respectively withΠ119894119895 and Γ119894119895 as a solution of 1199031 sdot 1199032 lineal localproblems
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894 (20)
0 = 119862119894Π119894119895 minus 119876119894 (21)
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following control lawcan be obtained [20 22 23]
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)
sdot 119870119894[
[
119909119896 minus
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896)Π119894119895119908119896]
]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(22)
However by substitution of 120587(119908119896) and 120574(119908119896) in (16) and (17)and considering
(1) the steady-state zero error manifold 120587(119908119896) = Π119908119896that is Π119894119895 = Π
(2) the input matrices 119861119894 = 119861 andor Γ119894119895 = Γ
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following controlsignal 119906119896 emerges
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(23)
On the other hand the existence of a fuzzy stabilizer of theform 119906 = sum
1199031
119894=1ℎ1119894(1199111119896)119870119894119909119896 ensuring that the tracking error
converges asymptotically to zero can be obtained from theParallel Distributed Compensator (PDC) [29 30] or anotherstability analysis for T-S fuzzy models such as [31]
Remark 2 The control signal in (22) is given by the substitu-tion of (18) and (19) in (16) and (17) the proposed controllerprovides the following advantages
(1) All parameters included in the controller are knownthis includes the membership functions of the plantand exosystemwhich arewell defined in theT-S fuzzymodel
On the other hand Π119894119895 and Γ119894119895 come directly fromsolving of 1199031 lowast 1199032 local linear problems equivalentto solving the Francis equations such problems canbe easily solved by using programs like Matlab orMathematica
(2) In the case when the 1199031 lowast 1199032 local linear problems leadto Π119894119895 = Π then at least a bounded error is ensured
(3) It is clear that when Π119894119895 = Π the termsum1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Π119894119895119908119896 changes to Π119908119896
leading to controller defined in (23)(4) The following condition the input matrices 119861119894 =
119861 andor Γ119894119895 = Γ avoids the crossed terms in thesolutions of (16) and (17) allowing the exact fuzzyoutput regulation
(5) The proposed controller can be seen as a simplesubstitution of the aforementioned elements
On the other hand the following disadvantages canappear
(1) If the condition is that the steady-state zero errormanifold 120587(119908119896) = Π119908119896 that is Π119894119895 = Π then it willbe necessary to adjust the local regulator by means ofnew membership functions Please refer to Section 3
(2) As expected the complexity of the controllerincreases according to the number of localsubsystems
The following theorem provides the conditions for theexistence of the exact fuzzy output regulator for a discrete-time T-S fuzzy models
Theorem 3 The exact fuzzy output regulation with fullinformation of systems defined as (12) is solvable if (a) thereexists the same zero error steady-state manifold 120587(119908119896) = Π(b) there exist 119906119896 = sum
1199031
119894=1ℎ119894119896(1199111119896)119870119894119909119896 for the fuzzy system
(c) the exosystem 120596119896+1 = 119904(120596119896) is Poisson stable and the inputmatrices for all subsystems 119861119894 are equal Moreover the ExactOutput Fuzzy Regulation Problem is solvable by the controller
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(24)
Proof From the previous analysis the existence of mappings120587(119908119896) = Π119908119896 and 120574(119908119896) = sum
1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Γ119894119895119908119896
is guaranteed when the input matrices for all subsystems 119861119894are equal and the solution of 1199031 sdot 1199032 lineal local problems is
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894
0 = 119862119894Π119894119895 minus 119876119894
(25)
leading to Π119894119895 = Π for all 119894 = 1 1199031 and 119895 = 1 1199032On the other hand the inclusion of condition (b) has been
thoroughly discussed in [22 23 27 28 31ndash33] and it impliesthe existence of a fuzzy stabilizer
Mathematical Problems in Engineering 5
Condition (c) ensures the nonexistence of crossed termsin the local Francis equations Finally condition (d) is intro-duced to avoid the fact that the reference signal converges tozero which would turn the regulation problem into a simplestability problem The rest of the proof follows directly fromthe previous analysis
3 The Output Regulator by means ofLocal Regulators and Tuning of NewMembership Functions
In this section a discrete-time T-S fuzzy model is consideredto solve the exact output regulation on the basis of linearlocal controllers So the main goal is to find a completeregulator based on the fuzzy summation of local regulatorsusing adequate membership functions such that the resultgiven in Theorem 3 can be relaxed [34] These membershipfunctions are not necessarily the same included in the fuzzyplant as is described in (19) Thus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896)
1199032
sum
119895=1
1205832119895 (1199112119896) Γ119894119895119908119896 (26)
where 1205831119894(1199111119896) and 1205832119895(1199112119896) are new membership func-tions such that the fuzzy output regulator obtained fromlocal regulators provides the exact fuzzy output regulationThis approach requires the computation of the linear localcontrollers and the computation of the new membershipfunctions In this work such functions are represented by thefollowing expression
1205831119894 (119909119896) =1
1 +1003816100381610038161003816(119909119896 minus 119888119894) 119886119894
1003816100381610038161003816
2119887119894
forall119894 = 1 1199031 (27)
1205832119895 (119908119896) =1
1 +10038161003816100381610038161003816(119908119896 minus 119888119895) 119886119895
10038161003816100381610038161003816
2119887119895
forall119895 = 1 1199032 (28)
1205831119894 and 1205832119895 are well known as generalized bell-shaped mem-bership functions and the parameters 119886119894 119886119895 119887119894 119887119895 119888119894 and119888119895 determine the form center and amplitude respectivelyTherefore from (22) the input can be defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896)
+
1199031
sum
119894=1
1205831119894 (119908119896)
1199032
sum
119895=1
1205832119895 (119908119896) Γ119894119895119908119896
(29)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)Then for tuning themembership functions (27) and (28)
the parameters 119886119894 and 119886119895will be optimized bymeans of geneticalgorithms ensuring the correct interpolation between thelocal linear regulators The foregoing can be summarized inthe control scheme depicted in Figure 1
To this end the following algorithm should be carried out
Algorithm 4 Main steps to take into account to solve thetuning membership functions problem are as follows [35]
(1) Start with a randomly generated population of nl-bitchromosomes (candidate solutions to a problem)Thetraditional representation is binary as in Figure 2A binary string is called ldquochromosomerdquo Each positiontherein is called ldquogenerdquo and the value in this positionis named ldquoallelerdquo
(2) Calculate the fitness 119891(119909) of each chromosome 119909 inthe population
(3) Repeat the following steps until n offspring have beencreated
(i) Select a pair of parent chromosomes from thecurrent population the probability of selectionbeing an increasing function of fitness Selectionis done ldquowith replacementrdquo meaning that thesame chromosome can be selected more thanonce to become a parent
(ii) With probability 119901119888 (the ldquocrossover probabil-ityrdquo or ldquocrossover raterdquo) crossover the pair ata randomly chosen point (chosen with uni-form probability) to form two offspring If nocrossover takes place form two offspring thatare exact copies of their respective parents(Note that here the crossover rate is defined to bethe probability that two parents will cross overin a single point)
(iii) Mutate the two offspring at each locus withprobability 119901119898 (the mutation probability ormutation rate) and place the resulting chromo-somes in the new population
(4) Replace the current population with the new popula-tion
(5) Go to step (2)
This process ends when the fitness function reaches avalue less than or equal to a predefined bound or when themaximum number of iterations is reached Each iteration ofthis process is called a generation
In order to apply a genetic algorithm it requires thefollowing five basic components
(i) A representation of the potential solutions to theproblem
(ii) One way to create an initial population of possiblesolutions (typically a random process)
(iii) An evaluation function to play the role of the environ-ment classifying the solutions in terms of its ldquofitnessrdquo
(iv) Genetic operators that alter the composition of thechromosomes that will be produced for generations
(v) Values for the various parameters used by the geneticalgorithm (population size crossover probabilitymutation probability maximum number of genera-tions etc)
6 Mathematical Problems in Engineering
Fuzzy exosystemFuzzy plant
Fuzzy controller
Regulator
Stabilizer
Bell-shaped mf rsquos
eGenetic algorithm
uk yk wk
xk
+
+
+
minus
ai bi ci
aj bj cj
(ai aj)
yrefk
r1
sumi=1
h1i(xk)ki xk minus 120587(wk)
r1
sumi=1
1205831i(wk)r2
sumj=1
1205832j(wk)Γijwk
1205831i(wk) =1
1 + (xk minus ci) ai i2b| |
1205832j(wk) =1
1 + (wk minus cj) aj 2bj| |
Figure 1 Control scheme for fuzzy output regulation and genetic algorithms
0 1 1 0 1 1 0 1 0 0 1 1 1 0 0 1
String 1 String 2 String 3 String 4
Figure 2 Binary string commonly used in genetic algorithms
The aforementioned can be summarized by the flowchartdepicted in Figure 3
4 Synchronization of T-S Discrete-TimeFuzzy Systems
The stabilization and synchronization of chaotic systems aretwo of the most challenging and stimulating problems dueto their capabilities of describing a great variety of veryinteresting phenomena in physics biology chemistry andengineering to name a few In this section the regulationtheory is used to synchronize chaotic systems described by T-S discrete-time fuzzy models Both the drive system and theresponse system are modeled by the same attractor (Rosslerrsquosequation) with the difference that response system can beinfluenced by an input signal This type of synchronizationis known as Complete Synchronization (CS) [36]
Considering two Rossler chaotic oscillators as = 119891(119908)
(drive system) and = 119891(119909 119908 119906) (response system) theordinary differential equations of these systems are
1 = minus (1199082 + 1199083)
2 = 1199081 + 1198861199082
3 = 1198871199081 minus (119888 minus 1199081) 1199083
Rossler attractor
Drive system
1 = minus (1199092 + 1199093)
2 = 1199091 + 1198861199092
3 = 1198871199091 minus (119888 minus 1199091) 1199093 + 119906
Rossler attractor
Response system
(30)
According to [15] these systems can be exactly repre-sented by means of the following two-rule T-S fuzzy modelswhen 119886 119887 and 119888 are constants and 1199091 isin [119888 minus 119889 119888 + 119889] with119889 gt 0 Thus
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(31)
Mathematical Problems in Engineering 7
Begin
Random initial population
Individual performance evaluation
Reproduction Crossover Mutation
Anothergeneration
Membership functions performance
End
Yes
No
GA
Chromosome selection for reproduction
e s=
1 2(x
1kminusw1k)2
Obj
ectiv
e fun
ctio
n
Figure 3 Flowchart of genetic algorithms
where
1198601 =[[
[
0 minus1 minus1
1 119886 0
119887 0 minus119889
]]
]
1198781 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 minus119889119908
]]
]
1198602 =[[
[
0 minus1 minus1
1 119886 0
119887 0 119889
]]
]
1198782 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 119889119908
]]
]
1198611 = 1198612 = [0 0 1]119879
119862119894 = 119876119894 = [1 0 0]
(32)
Besides the membership functions for such systems are
ℎ11 (1199091) =1
2(1 +
119888 minus 1199091
119889)
ℎ12 (1199091) =1
2(1 minus
119888 minus 1199091
119889)
ℎ21 (1199081) =1
2(1 +
119888 minus 1199081
119889)
ℎ22 (1199081) =1
2(1 minus
119888 minus 1199081
119889)
(33)
Now the continuous-time T-S fuzzy model can be convertedto the following discrete counterpart by using [1]
119866119894 = exp (119860 119894119879119904) = 119868 + 119860 119894119879119904 + 1198602
119894
1198792
119904
2+ sdot sdot sdot
119867119894 = int
119879119904
0
exp (119860 119894120591) 119861i119889120591 = (119866119894 minus 119868)119860minus1
119894119861119894
(34)
Therefore the discrete-time T-S fuzzy model is given by
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(35)
where
1198601 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 1 minus 119889119879119904
]]
]
1198781 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 1 minus 119889119908119879119904
]]
]
1198602 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 119879119904119889 + 1
]]
]
1198782 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 119889119908119879119904 + 1
]]
]
1198611 = 1198612 = [0 0 119879119904]119879
119862119894 = 119876119894 = [1 0 0]
(36)
8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
there exist mappings 119909119904119904(119905) = 120587(119908119896) and 119906119904119904 = 120574(119908119896) with120587(0) = 0 and 120574(0) = 0 satisfying
120587 (119904 (119908119896)) = 119891 (120587 (119908119896) 119908119896 120574 (119908119896))
0 = ℎ (120587 (119908119896) 119908119896)
(7)
Then the control signal for the nonlinear regulation is given by
119906119896 = 119870 (119909119896 minus 120587 (119908119896)) + 120574 (119908119896) (8)
Proof See [22ndash24]
The equation set (7) is known as Discrete-Time Francis-Isidori-Byrnes (DTFIB) equations and linear counterpart isobtained when the mappings 119909119904119904119896 = 120587(119908119896) and 119906119904119904119896 = 120574(119908119896)
transform into 119909119904119904119896 = Π119908119896 and 119906119904119904119896 = Γ119908119896 respectivelyThus the problem is reduced to solve linear matrix equations[25] given by
Π119878 = 119860Π + 119861Γ + 119875
0 = 119862Π minus 119876
(9)
21 The Discrete-Time Output Fuzzy Regulation ProblemTakagi and Sugeno proposed a fuzzy model composed ofa set of linear subsystems with IF-THEN rules capable ofrelating physical knowledge linguistic characteristics andproperties of the system Such amodel successfully representsa nonlinear system at least in a predefined region of phasespace [15] The T-S model for the plant and exosystem can bedescribed as follows [26]
Plant Model
Rule 119894IF 11991111119896 is119872
119894
11and and 1199111119901
1119896 is119872
119894
11199011
THEN
119909119896+1 = 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119910119896 = 119862119894119909119896
119894 = 1 2 1199031
(10)
where 1199031 is the number of rules in the model of theplant and the sets119872119894
1119895are the fuzzy sets defined based
on the previous dynamic knowledge of the system
Exosystem Model
Rule 119894IF 11991121119896 is119872
119894
21and and 1199112119901
2119896 is119872
119894
21199012
THEN
119908119896+1 = 119878119894119908119896
119910ref 119896 = Q119894119908119896119894 = 1 2 1199032 (11)
where 1199032 is the number of rules in the model of theexosystem and119872
119894
2119895are the fuzzy sets
Then the regulation problem defined by (1)ndash(5) can berepresented through the T-S discrete-time fuzzy model thatis [20]
119909119896+1 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119878119894119908119896
119890119896 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119862119894119909119896 minus
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119876119894119908119896
(12)
where 119909119896 isin R119899 is the state vector of the plant 119908119896 isin R119904 isthe state vector of the exosystem 119906119896 isin R119898 is the input signal119890119896 isin R119898 and ℎlowast119894(119911) is the normalized weight of each rule 1for the plant and 2 for the exosystem which depends on themembership function for the premise variable 119911lowast119896 in 119872
119894
lowast119895
that is
120596lowast119894 (119911lowast119896) =
119901lowast
prod
119895=1
119872119894
lowast119895(119911lowast119895119896)
ℎlowast119894 (119911lowast119896) =
120596lowast119894 (119911lowast119896)
sum119903lowast
119894=1120596lowast119894 (119911lowast119896)
119903lowast
sum
119894=1
ℎlowast119894 (119911lowast119896) = 1
ℎlowast119894 (119911lowast119896) ge 0
(13)
with 119911lowast119896 = [119911lowast1119896 119911lowast2119896 sdot sdot sdot 119911lowast119901lowast119896] as a function of 119909119896
andor 119908119896 119894 = 1 119903lowast and 119895 = 1 119901The discrete-time fuzzy output regulation problem consists
of finding a controller 119906119896 = 120572(119909119896 119908119896) such that the closed-loop system with no external signal
119909119896+1 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894119909119896 + 119861119894120572 (119909119896 0) (14)
has an asymptotically stable equilibrium pointThe solution of system (12) satisfies
lim119896rarrinfin
119890119896 = 0 (15)
In order to achieve the synchronization of chaotic systemsdescribed by a T-S discrete-time fuzzy model it is necessaryto fulfill (7) [27 28] Then
120587 (119904 (119908119896))
=
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119860 119894120587 (119908119896) + 119861119894120574 (119908119896) + 119875119894119908119896
(16)
0 =
1199031
sum
119894=1
ℎ1119894 (1199111119896) 119862119894120587 (119908119896) minus
1199032
sum
119894=1
ℎ2119894 (1199112119896) 119876119894119908119896 (17)
4 Mathematical Problems in Engineering
where 120587(119908119896) is the zero error steady-state manifold whichbecomes invariant by the effect of the steady-state input120574(119908119896)
Assuming the mappings 120587(119908119896) and 120574(119908119896) as
(119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896)Π119894119895119908119896 (18)
120574 (119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896) Γ119894119895119908119896 (19)
respectively withΠ119894119895 and Γ119894119895 as a solution of 1199031 sdot 1199032 lineal localproblems
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894 (20)
0 = 119862119894Π119894119895 minus 119876119894 (21)
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following control lawcan be obtained [20 22 23]
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)
sdot 119870119894[
[
119909119896 minus
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896)Π119894119895119908119896]
]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(22)
However by substitution of 120587(119908119896) and 120574(119908119896) in (16) and (17)and considering
(1) the steady-state zero error manifold 120587(119908119896) = Π119908119896that is Π119894119895 = Π
(2) the input matrices 119861119894 = 119861 andor Γ119894119895 = Γ
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following controlsignal 119906119896 emerges
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(23)
On the other hand the existence of a fuzzy stabilizer of theform 119906 = sum
1199031
119894=1ℎ1119894(1199111119896)119870119894119909119896 ensuring that the tracking error
converges asymptotically to zero can be obtained from theParallel Distributed Compensator (PDC) [29 30] or anotherstability analysis for T-S fuzzy models such as [31]
Remark 2 The control signal in (22) is given by the substitu-tion of (18) and (19) in (16) and (17) the proposed controllerprovides the following advantages
(1) All parameters included in the controller are knownthis includes the membership functions of the plantand exosystemwhich arewell defined in theT-S fuzzymodel
On the other hand Π119894119895 and Γ119894119895 come directly fromsolving of 1199031 lowast 1199032 local linear problems equivalentto solving the Francis equations such problems canbe easily solved by using programs like Matlab orMathematica
(2) In the case when the 1199031 lowast 1199032 local linear problems leadto Π119894119895 = Π then at least a bounded error is ensured
(3) It is clear that when Π119894119895 = Π the termsum1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Π119894119895119908119896 changes to Π119908119896
leading to controller defined in (23)(4) The following condition the input matrices 119861119894 =
119861 andor Γ119894119895 = Γ avoids the crossed terms in thesolutions of (16) and (17) allowing the exact fuzzyoutput regulation
(5) The proposed controller can be seen as a simplesubstitution of the aforementioned elements
On the other hand the following disadvantages canappear
(1) If the condition is that the steady-state zero errormanifold 120587(119908119896) = Π119908119896 that is Π119894119895 = Π then it willbe necessary to adjust the local regulator by means ofnew membership functions Please refer to Section 3
(2) As expected the complexity of the controllerincreases according to the number of localsubsystems
The following theorem provides the conditions for theexistence of the exact fuzzy output regulator for a discrete-time T-S fuzzy models
Theorem 3 The exact fuzzy output regulation with fullinformation of systems defined as (12) is solvable if (a) thereexists the same zero error steady-state manifold 120587(119908119896) = Π(b) there exist 119906119896 = sum
1199031
119894=1ℎ119894119896(1199111119896)119870119894119909119896 for the fuzzy system
(c) the exosystem 120596119896+1 = 119904(120596119896) is Poisson stable and the inputmatrices for all subsystems 119861119894 are equal Moreover the ExactOutput Fuzzy Regulation Problem is solvable by the controller
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(24)
Proof From the previous analysis the existence of mappings120587(119908119896) = Π119908119896 and 120574(119908119896) = sum
1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Γ119894119895119908119896
is guaranteed when the input matrices for all subsystems 119861119894are equal and the solution of 1199031 sdot 1199032 lineal local problems is
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894
0 = 119862119894Π119894119895 minus 119876119894
(25)
leading to Π119894119895 = Π for all 119894 = 1 1199031 and 119895 = 1 1199032On the other hand the inclusion of condition (b) has been
thoroughly discussed in [22 23 27 28 31ndash33] and it impliesthe existence of a fuzzy stabilizer
Mathematical Problems in Engineering 5
Condition (c) ensures the nonexistence of crossed termsin the local Francis equations Finally condition (d) is intro-duced to avoid the fact that the reference signal converges tozero which would turn the regulation problem into a simplestability problem The rest of the proof follows directly fromthe previous analysis
3 The Output Regulator by means ofLocal Regulators and Tuning of NewMembership Functions
In this section a discrete-time T-S fuzzy model is consideredto solve the exact output regulation on the basis of linearlocal controllers So the main goal is to find a completeregulator based on the fuzzy summation of local regulatorsusing adequate membership functions such that the resultgiven in Theorem 3 can be relaxed [34] These membershipfunctions are not necessarily the same included in the fuzzyplant as is described in (19) Thus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896)
1199032
sum
119895=1
1205832119895 (1199112119896) Γ119894119895119908119896 (26)
where 1205831119894(1199111119896) and 1205832119895(1199112119896) are new membership func-tions such that the fuzzy output regulator obtained fromlocal regulators provides the exact fuzzy output regulationThis approach requires the computation of the linear localcontrollers and the computation of the new membershipfunctions In this work such functions are represented by thefollowing expression
1205831119894 (119909119896) =1
1 +1003816100381610038161003816(119909119896 minus 119888119894) 119886119894
1003816100381610038161003816
2119887119894
forall119894 = 1 1199031 (27)
1205832119895 (119908119896) =1
1 +10038161003816100381610038161003816(119908119896 minus 119888119895) 119886119895
10038161003816100381610038161003816
2119887119895
forall119895 = 1 1199032 (28)
1205831119894 and 1205832119895 are well known as generalized bell-shaped mem-bership functions and the parameters 119886119894 119886119895 119887119894 119887119895 119888119894 and119888119895 determine the form center and amplitude respectivelyTherefore from (22) the input can be defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896)
+
1199031
sum
119894=1
1205831119894 (119908119896)
1199032
sum
119895=1
1205832119895 (119908119896) Γ119894119895119908119896
(29)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)Then for tuning themembership functions (27) and (28)
the parameters 119886119894 and 119886119895will be optimized bymeans of geneticalgorithms ensuring the correct interpolation between thelocal linear regulators The foregoing can be summarized inthe control scheme depicted in Figure 1
To this end the following algorithm should be carried out
Algorithm 4 Main steps to take into account to solve thetuning membership functions problem are as follows [35]
(1) Start with a randomly generated population of nl-bitchromosomes (candidate solutions to a problem)Thetraditional representation is binary as in Figure 2A binary string is called ldquochromosomerdquo Each positiontherein is called ldquogenerdquo and the value in this positionis named ldquoallelerdquo
(2) Calculate the fitness 119891(119909) of each chromosome 119909 inthe population
(3) Repeat the following steps until n offspring have beencreated
(i) Select a pair of parent chromosomes from thecurrent population the probability of selectionbeing an increasing function of fitness Selectionis done ldquowith replacementrdquo meaning that thesame chromosome can be selected more thanonce to become a parent
(ii) With probability 119901119888 (the ldquocrossover probabil-ityrdquo or ldquocrossover raterdquo) crossover the pair ata randomly chosen point (chosen with uni-form probability) to form two offspring If nocrossover takes place form two offspring thatare exact copies of their respective parents(Note that here the crossover rate is defined to bethe probability that two parents will cross overin a single point)
(iii) Mutate the two offspring at each locus withprobability 119901119898 (the mutation probability ormutation rate) and place the resulting chromo-somes in the new population
(4) Replace the current population with the new popula-tion
(5) Go to step (2)
This process ends when the fitness function reaches avalue less than or equal to a predefined bound or when themaximum number of iterations is reached Each iteration ofthis process is called a generation
In order to apply a genetic algorithm it requires thefollowing five basic components
(i) A representation of the potential solutions to theproblem
(ii) One way to create an initial population of possiblesolutions (typically a random process)
(iii) An evaluation function to play the role of the environ-ment classifying the solutions in terms of its ldquofitnessrdquo
(iv) Genetic operators that alter the composition of thechromosomes that will be produced for generations
(v) Values for the various parameters used by the geneticalgorithm (population size crossover probabilitymutation probability maximum number of genera-tions etc)
6 Mathematical Problems in Engineering
Fuzzy exosystemFuzzy plant
Fuzzy controller
Regulator
Stabilizer
Bell-shaped mf rsquos
eGenetic algorithm
uk yk wk
xk
+
+
+
minus
ai bi ci
aj bj cj
(ai aj)
yrefk
r1
sumi=1
h1i(xk)ki xk minus 120587(wk)
r1
sumi=1
1205831i(wk)r2
sumj=1
1205832j(wk)Γijwk
1205831i(wk) =1
1 + (xk minus ci) ai i2b| |
1205832j(wk) =1
1 + (wk minus cj) aj 2bj| |
Figure 1 Control scheme for fuzzy output regulation and genetic algorithms
0 1 1 0 1 1 0 1 0 0 1 1 1 0 0 1
String 1 String 2 String 3 String 4
Figure 2 Binary string commonly used in genetic algorithms
The aforementioned can be summarized by the flowchartdepicted in Figure 3
4 Synchronization of T-S Discrete-TimeFuzzy Systems
The stabilization and synchronization of chaotic systems aretwo of the most challenging and stimulating problems dueto their capabilities of describing a great variety of veryinteresting phenomena in physics biology chemistry andengineering to name a few In this section the regulationtheory is used to synchronize chaotic systems described by T-S discrete-time fuzzy models Both the drive system and theresponse system are modeled by the same attractor (Rosslerrsquosequation) with the difference that response system can beinfluenced by an input signal This type of synchronizationis known as Complete Synchronization (CS) [36]
Considering two Rossler chaotic oscillators as = 119891(119908)
(drive system) and = 119891(119909 119908 119906) (response system) theordinary differential equations of these systems are
1 = minus (1199082 + 1199083)
2 = 1199081 + 1198861199082
3 = 1198871199081 minus (119888 minus 1199081) 1199083
Rossler attractor
Drive system
1 = minus (1199092 + 1199093)
2 = 1199091 + 1198861199092
3 = 1198871199091 minus (119888 minus 1199091) 1199093 + 119906
Rossler attractor
Response system
(30)
According to [15] these systems can be exactly repre-sented by means of the following two-rule T-S fuzzy modelswhen 119886 119887 and 119888 are constants and 1199091 isin [119888 minus 119889 119888 + 119889] with119889 gt 0 Thus
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(31)
Mathematical Problems in Engineering 7
Begin
Random initial population
Individual performance evaluation
Reproduction Crossover Mutation
Anothergeneration
Membership functions performance
End
Yes
No
GA
Chromosome selection for reproduction
e s=
1 2(x
1kminusw1k)2
Obj
ectiv
e fun
ctio
n
Figure 3 Flowchart of genetic algorithms
where
1198601 =[[
[
0 minus1 minus1
1 119886 0
119887 0 minus119889
]]
]
1198781 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 minus119889119908
]]
]
1198602 =[[
[
0 minus1 minus1
1 119886 0
119887 0 119889
]]
]
1198782 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 119889119908
]]
]
1198611 = 1198612 = [0 0 1]119879
119862119894 = 119876119894 = [1 0 0]
(32)
Besides the membership functions for such systems are
ℎ11 (1199091) =1
2(1 +
119888 minus 1199091
119889)
ℎ12 (1199091) =1
2(1 minus
119888 minus 1199091
119889)
ℎ21 (1199081) =1
2(1 +
119888 minus 1199081
119889)
ℎ22 (1199081) =1
2(1 minus
119888 minus 1199081
119889)
(33)
Now the continuous-time T-S fuzzy model can be convertedto the following discrete counterpart by using [1]
119866119894 = exp (119860 119894119879119904) = 119868 + 119860 119894119879119904 + 1198602
119894
1198792
119904
2+ sdot sdot sdot
119867119894 = int
119879119904
0
exp (119860 119894120591) 119861i119889120591 = (119866119894 minus 119868)119860minus1
119894119861119894
(34)
Therefore the discrete-time T-S fuzzy model is given by
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(35)
where
1198601 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 1 minus 119889119879119904
]]
]
1198781 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 1 minus 119889119908119879119904
]]
]
1198602 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 119879119904119889 + 1
]]
]
1198782 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 119889119908119879119904 + 1
]]
]
1198611 = 1198612 = [0 0 119879119904]119879
119862119894 = 119876119894 = [1 0 0]
(36)
8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
where 120587(119908119896) is the zero error steady-state manifold whichbecomes invariant by the effect of the steady-state input120574(119908119896)
Assuming the mappings 120587(119908119896) and 120574(119908119896) as
(119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896)Π119894119895119908119896 (18)
120574 (119908119896) =
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119894 (1199112119896) Γ119894119895119908119896 (19)
respectively withΠ119894119895 and Γ119894119895 as a solution of 1199031 sdot 1199032 lineal localproblems
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894 (20)
0 = 119862119894Π119894119895 minus 119876119894 (21)
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following control lawcan be obtained [20 22 23]
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)
sdot 119870119894[
[
119909119896 minus
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896)Π119894119895119908119896]
]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(22)
However by substitution of 120587(119908119896) and 120574(119908119896) in (16) and (17)and considering
(1) the steady-state zero error manifold 120587(119908119896) = Π119908119896that is Π119894119895 = Π
(2) the input matrices 119861119894 = 119861 andor Γ119894119895 = Γ
for all 119894 = 1 1199031 and 119895 = 1 1199032 the following controlsignal 119906119896 emerges
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(23)
On the other hand the existence of a fuzzy stabilizer of theform 119906 = sum
1199031
119894=1ℎ1119894(1199111119896)119870119894119909119896 ensuring that the tracking error
converges asymptotically to zero can be obtained from theParallel Distributed Compensator (PDC) [29 30] or anotherstability analysis for T-S fuzzy models such as [31]
Remark 2 The control signal in (22) is given by the substitu-tion of (18) and (19) in (16) and (17) the proposed controllerprovides the following advantages
(1) All parameters included in the controller are knownthis includes the membership functions of the plantand exosystemwhich arewell defined in theT-S fuzzymodel
On the other hand Π119894119895 and Γ119894119895 come directly fromsolving of 1199031 lowast 1199032 local linear problems equivalentto solving the Francis equations such problems canbe easily solved by using programs like Matlab orMathematica
(2) In the case when the 1199031 lowast 1199032 local linear problems leadto Π119894119895 = Π then at least a bounded error is ensured
(3) It is clear that when Π119894119895 = Π the termsum1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Π119894119895119908119896 changes to Π119908119896
leading to controller defined in (23)(4) The following condition the input matrices 119861119894 =
119861 andor Γ119894119895 = Γ avoids the crossed terms in thesolutions of (16) and (17) allowing the exact fuzzyoutput regulation
(5) The proposed controller can be seen as a simplesubstitution of the aforementioned elements
On the other hand the following disadvantages canappear
(1) If the condition is that the steady-state zero errormanifold 120587(119908119896) = Π119908119896 that is Π119894119895 = Π then it willbe necessary to adjust the local regulator by means ofnew membership functions Please refer to Section 3
(2) As expected the complexity of the controllerincreases according to the number of localsubsystems
The following theorem provides the conditions for theexistence of the exact fuzzy output regulator for a discrete-time T-S fuzzy models
Theorem 3 The exact fuzzy output regulation with fullinformation of systems defined as (12) is solvable if (a) thereexists the same zero error steady-state manifold 120587(119908119896) = Π(b) there exist 119906119896 = sum
1199031
119894=1ℎ119894119896(1199111119896)119870119894119909119896 for the fuzzy system
(c) the exosystem 120596119896+1 = 119904(120596119896) is Poisson stable and the inputmatrices for all subsystems 119861119894 are equal Moreover the ExactOutput Fuzzy Regulation Problem is solvable by the controller
119906119896 =
1199031
sum
ℎ=1
ℎ1119894 (1199111119896)119870119894 [119909119896 minus Π119908119896]
+
1199031
sum
119894=1
ℎ1119894 (1199111119896)
1199032
sum
119895=1
ℎ2119895 (1199112119896) Γ119894119895119908119896
(24)
Proof From the previous analysis the existence of mappings120587(119908119896) = Π119908119896 and 120574(119908119896) = sum
1199031
119894=1ℎ1119894(1199111119896) sum
1199032
119895=1ℎ2119895(1199112119896)Γ119894119895119908119896
is guaranteed when the input matrices for all subsystems 119861119894are equal and the solution of 1199031 sdot 1199032 lineal local problems is
Π119894119895119878119895 = 119860 119894Π119894119895 + 119861119894Γ119894119895 + 119875119894
0 = 119862119894Π119894119895 minus 119876119894
(25)
leading to Π119894119895 = Π for all 119894 = 1 1199031 and 119895 = 1 1199032On the other hand the inclusion of condition (b) has been
thoroughly discussed in [22 23 27 28 31ndash33] and it impliesthe existence of a fuzzy stabilizer
Mathematical Problems in Engineering 5
Condition (c) ensures the nonexistence of crossed termsin the local Francis equations Finally condition (d) is intro-duced to avoid the fact that the reference signal converges tozero which would turn the regulation problem into a simplestability problem The rest of the proof follows directly fromthe previous analysis
3 The Output Regulator by means ofLocal Regulators and Tuning of NewMembership Functions
In this section a discrete-time T-S fuzzy model is consideredto solve the exact output regulation on the basis of linearlocal controllers So the main goal is to find a completeregulator based on the fuzzy summation of local regulatorsusing adequate membership functions such that the resultgiven in Theorem 3 can be relaxed [34] These membershipfunctions are not necessarily the same included in the fuzzyplant as is described in (19) Thus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896)
1199032
sum
119895=1
1205832119895 (1199112119896) Γ119894119895119908119896 (26)
where 1205831119894(1199111119896) and 1205832119895(1199112119896) are new membership func-tions such that the fuzzy output regulator obtained fromlocal regulators provides the exact fuzzy output regulationThis approach requires the computation of the linear localcontrollers and the computation of the new membershipfunctions In this work such functions are represented by thefollowing expression
1205831119894 (119909119896) =1
1 +1003816100381610038161003816(119909119896 minus 119888119894) 119886119894
1003816100381610038161003816
2119887119894
forall119894 = 1 1199031 (27)
1205832119895 (119908119896) =1
1 +10038161003816100381610038161003816(119908119896 minus 119888119895) 119886119895
10038161003816100381610038161003816
2119887119895
forall119895 = 1 1199032 (28)
1205831119894 and 1205832119895 are well known as generalized bell-shaped mem-bership functions and the parameters 119886119894 119886119895 119887119894 119887119895 119888119894 and119888119895 determine the form center and amplitude respectivelyTherefore from (22) the input can be defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896)
+
1199031
sum
119894=1
1205831119894 (119908119896)
1199032
sum
119895=1
1205832119895 (119908119896) Γ119894119895119908119896
(29)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)Then for tuning themembership functions (27) and (28)
the parameters 119886119894 and 119886119895will be optimized bymeans of geneticalgorithms ensuring the correct interpolation between thelocal linear regulators The foregoing can be summarized inthe control scheme depicted in Figure 1
To this end the following algorithm should be carried out
Algorithm 4 Main steps to take into account to solve thetuning membership functions problem are as follows [35]
(1) Start with a randomly generated population of nl-bitchromosomes (candidate solutions to a problem)Thetraditional representation is binary as in Figure 2A binary string is called ldquochromosomerdquo Each positiontherein is called ldquogenerdquo and the value in this positionis named ldquoallelerdquo
(2) Calculate the fitness 119891(119909) of each chromosome 119909 inthe population
(3) Repeat the following steps until n offspring have beencreated
(i) Select a pair of parent chromosomes from thecurrent population the probability of selectionbeing an increasing function of fitness Selectionis done ldquowith replacementrdquo meaning that thesame chromosome can be selected more thanonce to become a parent
(ii) With probability 119901119888 (the ldquocrossover probabil-ityrdquo or ldquocrossover raterdquo) crossover the pair ata randomly chosen point (chosen with uni-form probability) to form two offspring If nocrossover takes place form two offspring thatare exact copies of their respective parents(Note that here the crossover rate is defined to bethe probability that two parents will cross overin a single point)
(iii) Mutate the two offspring at each locus withprobability 119901119898 (the mutation probability ormutation rate) and place the resulting chromo-somes in the new population
(4) Replace the current population with the new popula-tion
(5) Go to step (2)
This process ends when the fitness function reaches avalue less than or equal to a predefined bound or when themaximum number of iterations is reached Each iteration ofthis process is called a generation
In order to apply a genetic algorithm it requires thefollowing five basic components
(i) A representation of the potential solutions to theproblem
(ii) One way to create an initial population of possiblesolutions (typically a random process)
(iii) An evaluation function to play the role of the environ-ment classifying the solutions in terms of its ldquofitnessrdquo
(iv) Genetic operators that alter the composition of thechromosomes that will be produced for generations
(v) Values for the various parameters used by the geneticalgorithm (population size crossover probabilitymutation probability maximum number of genera-tions etc)
6 Mathematical Problems in Engineering
Fuzzy exosystemFuzzy plant
Fuzzy controller
Regulator
Stabilizer
Bell-shaped mf rsquos
eGenetic algorithm
uk yk wk
xk
+
+
+
minus
ai bi ci
aj bj cj
(ai aj)
yrefk
r1
sumi=1
h1i(xk)ki xk minus 120587(wk)
r1
sumi=1
1205831i(wk)r2
sumj=1
1205832j(wk)Γijwk
1205831i(wk) =1
1 + (xk minus ci) ai i2b| |
1205832j(wk) =1
1 + (wk minus cj) aj 2bj| |
Figure 1 Control scheme for fuzzy output regulation and genetic algorithms
0 1 1 0 1 1 0 1 0 0 1 1 1 0 0 1
String 1 String 2 String 3 String 4
Figure 2 Binary string commonly used in genetic algorithms
The aforementioned can be summarized by the flowchartdepicted in Figure 3
4 Synchronization of T-S Discrete-TimeFuzzy Systems
The stabilization and synchronization of chaotic systems aretwo of the most challenging and stimulating problems dueto their capabilities of describing a great variety of veryinteresting phenomena in physics biology chemistry andengineering to name a few In this section the regulationtheory is used to synchronize chaotic systems described by T-S discrete-time fuzzy models Both the drive system and theresponse system are modeled by the same attractor (Rosslerrsquosequation) with the difference that response system can beinfluenced by an input signal This type of synchronizationis known as Complete Synchronization (CS) [36]
Considering two Rossler chaotic oscillators as = 119891(119908)
(drive system) and = 119891(119909 119908 119906) (response system) theordinary differential equations of these systems are
1 = minus (1199082 + 1199083)
2 = 1199081 + 1198861199082
3 = 1198871199081 minus (119888 minus 1199081) 1199083
Rossler attractor
Drive system
1 = minus (1199092 + 1199093)
2 = 1199091 + 1198861199092
3 = 1198871199091 minus (119888 minus 1199091) 1199093 + 119906
Rossler attractor
Response system
(30)
According to [15] these systems can be exactly repre-sented by means of the following two-rule T-S fuzzy modelswhen 119886 119887 and 119888 are constants and 1199091 isin [119888 minus 119889 119888 + 119889] with119889 gt 0 Thus
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(31)
Mathematical Problems in Engineering 7
Begin
Random initial population
Individual performance evaluation
Reproduction Crossover Mutation
Anothergeneration
Membership functions performance
End
Yes
No
GA
Chromosome selection for reproduction
e s=
1 2(x
1kminusw1k)2
Obj
ectiv
e fun
ctio
n
Figure 3 Flowchart of genetic algorithms
where
1198601 =[[
[
0 minus1 minus1
1 119886 0
119887 0 minus119889
]]
]
1198781 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 minus119889119908
]]
]
1198602 =[[
[
0 minus1 minus1
1 119886 0
119887 0 119889
]]
]
1198782 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 119889119908
]]
]
1198611 = 1198612 = [0 0 1]119879
119862119894 = 119876119894 = [1 0 0]
(32)
Besides the membership functions for such systems are
ℎ11 (1199091) =1
2(1 +
119888 minus 1199091
119889)
ℎ12 (1199091) =1
2(1 minus
119888 minus 1199091
119889)
ℎ21 (1199081) =1
2(1 +
119888 minus 1199081
119889)
ℎ22 (1199081) =1
2(1 minus
119888 minus 1199081
119889)
(33)
Now the continuous-time T-S fuzzy model can be convertedto the following discrete counterpart by using [1]
119866119894 = exp (119860 119894119879119904) = 119868 + 119860 119894119879119904 + 1198602
119894
1198792
119904
2+ sdot sdot sdot
119867119894 = int
119879119904
0
exp (119860 119894120591) 119861i119889120591 = (119866119894 minus 119868)119860minus1
119894119861119894
(34)
Therefore the discrete-time T-S fuzzy model is given by
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(35)
where
1198601 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 1 minus 119889119879119904
]]
]
1198781 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 1 minus 119889119908119879119904
]]
]
1198602 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 119879119904119889 + 1
]]
]
1198782 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 119889119908119879119904 + 1
]]
]
1198611 = 1198612 = [0 0 119879119904]119879
119862119894 = 119876119894 = [1 0 0]
(36)
8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Condition (c) ensures the nonexistence of crossed termsin the local Francis equations Finally condition (d) is intro-duced to avoid the fact that the reference signal converges tozero which would turn the regulation problem into a simplestability problem The rest of the proof follows directly fromthe previous analysis
3 The Output Regulator by means ofLocal Regulators and Tuning of NewMembership Functions
In this section a discrete-time T-S fuzzy model is consideredto solve the exact output regulation on the basis of linearlocal controllers So the main goal is to find a completeregulator based on the fuzzy summation of local regulatorsusing adequate membership functions such that the resultgiven in Theorem 3 can be relaxed [34] These membershipfunctions are not necessarily the same included in the fuzzyplant as is described in (19) Thus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896)
1199032
sum
119895=1
1205832119895 (1199112119896) Γ119894119895119908119896 (26)
where 1205831119894(1199111119896) and 1205832119895(1199112119896) are new membership func-tions such that the fuzzy output regulator obtained fromlocal regulators provides the exact fuzzy output regulationThis approach requires the computation of the linear localcontrollers and the computation of the new membershipfunctions In this work such functions are represented by thefollowing expression
1205831119894 (119909119896) =1
1 +1003816100381610038161003816(119909119896 minus 119888119894) 119886119894
1003816100381610038161003816
2119887119894
forall119894 = 1 1199031 (27)
1205832119895 (119908119896) =1
1 +10038161003816100381610038161003816(119908119896 minus 119888119895) 119886119895
10038161003816100381610038161003816
2119887119895
forall119895 = 1 1199032 (28)
1205831119894 and 1205832119895 are well known as generalized bell-shaped mem-bership functions and the parameters 119886119894 119886119895 119887119894 119887119895 119888119894 and119888119895 determine the form center and amplitude respectivelyTherefore from (22) the input can be defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896)
+
1199031
sum
119894=1
1205831119894 (119908119896)
1199032
sum
119895=1
1205832119895 (119908119896) Γ119894119895119908119896
(29)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)Then for tuning themembership functions (27) and (28)
the parameters 119886119894 and 119886119895will be optimized bymeans of geneticalgorithms ensuring the correct interpolation between thelocal linear regulators The foregoing can be summarized inthe control scheme depicted in Figure 1
To this end the following algorithm should be carried out
Algorithm 4 Main steps to take into account to solve thetuning membership functions problem are as follows [35]
(1) Start with a randomly generated population of nl-bitchromosomes (candidate solutions to a problem)Thetraditional representation is binary as in Figure 2A binary string is called ldquochromosomerdquo Each positiontherein is called ldquogenerdquo and the value in this positionis named ldquoallelerdquo
(2) Calculate the fitness 119891(119909) of each chromosome 119909 inthe population
(3) Repeat the following steps until n offspring have beencreated
(i) Select a pair of parent chromosomes from thecurrent population the probability of selectionbeing an increasing function of fitness Selectionis done ldquowith replacementrdquo meaning that thesame chromosome can be selected more thanonce to become a parent
(ii) With probability 119901119888 (the ldquocrossover probabil-ityrdquo or ldquocrossover raterdquo) crossover the pair ata randomly chosen point (chosen with uni-form probability) to form two offspring If nocrossover takes place form two offspring thatare exact copies of their respective parents(Note that here the crossover rate is defined to bethe probability that two parents will cross overin a single point)
(iii) Mutate the two offspring at each locus withprobability 119901119898 (the mutation probability ormutation rate) and place the resulting chromo-somes in the new population
(4) Replace the current population with the new popula-tion
(5) Go to step (2)
This process ends when the fitness function reaches avalue less than or equal to a predefined bound or when themaximum number of iterations is reached Each iteration ofthis process is called a generation
In order to apply a genetic algorithm it requires thefollowing five basic components
(i) A representation of the potential solutions to theproblem
(ii) One way to create an initial population of possiblesolutions (typically a random process)
(iii) An evaluation function to play the role of the environ-ment classifying the solutions in terms of its ldquofitnessrdquo
(iv) Genetic operators that alter the composition of thechromosomes that will be produced for generations
(v) Values for the various parameters used by the geneticalgorithm (population size crossover probabilitymutation probability maximum number of genera-tions etc)
6 Mathematical Problems in Engineering
Fuzzy exosystemFuzzy plant
Fuzzy controller
Regulator
Stabilizer
Bell-shaped mf rsquos
eGenetic algorithm
uk yk wk
xk
+
+
+
minus
ai bi ci
aj bj cj
(ai aj)
yrefk
r1
sumi=1
h1i(xk)ki xk minus 120587(wk)
r1
sumi=1
1205831i(wk)r2
sumj=1
1205832j(wk)Γijwk
1205831i(wk) =1
1 + (xk minus ci) ai i2b| |
1205832j(wk) =1
1 + (wk minus cj) aj 2bj| |
Figure 1 Control scheme for fuzzy output regulation and genetic algorithms
0 1 1 0 1 1 0 1 0 0 1 1 1 0 0 1
String 1 String 2 String 3 String 4
Figure 2 Binary string commonly used in genetic algorithms
The aforementioned can be summarized by the flowchartdepicted in Figure 3
4 Synchronization of T-S Discrete-TimeFuzzy Systems
The stabilization and synchronization of chaotic systems aretwo of the most challenging and stimulating problems dueto their capabilities of describing a great variety of veryinteresting phenomena in physics biology chemistry andengineering to name a few In this section the regulationtheory is used to synchronize chaotic systems described by T-S discrete-time fuzzy models Both the drive system and theresponse system are modeled by the same attractor (Rosslerrsquosequation) with the difference that response system can beinfluenced by an input signal This type of synchronizationis known as Complete Synchronization (CS) [36]
Considering two Rossler chaotic oscillators as = 119891(119908)
(drive system) and = 119891(119909 119908 119906) (response system) theordinary differential equations of these systems are
1 = minus (1199082 + 1199083)
2 = 1199081 + 1198861199082
3 = 1198871199081 minus (119888 minus 1199081) 1199083
Rossler attractor
Drive system
1 = minus (1199092 + 1199093)
2 = 1199091 + 1198861199092
3 = 1198871199091 minus (119888 minus 1199091) 1199093 + 119906
Rossler attractor
Response system
(30)
According to [15] these systems can be exactly repre-sented by means of the following two-rule T-S fuzzy modelswhen 119886 119887 and 119888 are constants and 1199091 isin [119888 minus 119889 119888 + 119889] with119889 gt 0 Thus
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(31)
Mathematical Problems in Engineering 7
Begin
Random initial population
Individual performance evaluation
Reproduction Crossover Mutation
Anothergeneration
Membership functions performance
End
Yes
No
GA
Chromosome selection for reproduction
e s=
1 2(x
1kminusw1k)2
Obj
ectiv
e fun
ctio
n
Figure 3 Flowchart of genetic algorithms
where
1198601 =[[
[
0 minus1 minus1
1 119886 0
119887 0 minus119889
]]
]
1198781 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 minus119889119908
]]
]
1198602 =[[
[
0 minus1 minus1
1 119886 0
119887 0 119889
]]
]
1198782 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 119889119908
]]
]
1198611 = 1198612 = [0 0 1]119879
119862119894 = 119876119894 = [1 0 0]
(32)
Besides the membership functions for such systems are
ℎ11 (1199091) =1
2(1 +
119888 minus 1199091
119889)
ℎ12 (1199091) =1
2(1 minus
119888 minus 1199091
119889)
ℎ21 (1199081) =1
2(1 +
119888 minus 1199081
119889)
ℎ22 (1199081) =1
2(1 minus
119888 minus 1199081
119889)
(33)
Now the continuous-time T-S fuzzy model can be convertedto the following discrete counterpart by using [1]
119866119894 = exp (119860 119894119879119904) = 119868 + 119860 119894119879119904 + 1198602
119894
1198792
119904
2+ sdot sdot sdot
119867119894 = int
119879119904
0
exp (119860 119894120591) 119861i119889120591 = (119866119894 minus 119868)119860minus1
119894119861119894
(34)
Therefore the discrete-time T-S fuzzy model is given by
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(35)
where
1198601 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 1 minus 119889119879119904
]]
]
1198781 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 1 minus 119889119908119879119904
]]
]
1198602 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 119879119904119889 + 1
]]
]
1198782 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 119889119908119879119904 + 1
]]
]
1198611 = 1198612 = [0 0 119879119904]119879
119862119894 = 119876119894 = [1 0 0]
(36)
8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Fuzzy exosystemFuzzy plant
Fuzzy controller
Regulator
Stabilizer
Bell-shaped mf rsquos
eGenetic algorithm
uk yk wk
xk
+
+
+
minus
ai bi ci
aj bj cj
(ai aj)
yrefk
r1
sumi=1
h1i(xk)ki xk minus 120587(wk)
r1
sumi=1
1205831i(wk)r2
sumj=1
1205832j(wk)Γijwk
1205831i(wk) =1
1 + (xk minus ci) ai i2b| |
1205832j(wk) =1
1 + (wk minus cj) aj 2bj| |
Figure 1 Control scheme for fuzzy output regulation and genetic algorithms
0 1 1 0 1 1 0 1 0 0 1 1 1 0 0 1
String 1 String 2 String 3 String 4
Figure 2 Binary string commonly used in genetic algorithms
The aforementioned can be summarized by the flowchartdepicted in Figure 3
4 Synchronization of T-S Discrete-TimeFuzzy Systems
The stabilization and synchronization of chaotic systems aretwo of the most challenging and stimulating problems dueto their capabilities of describing a great variety of veryinteresting phenomena in physics biology chemistry andengineering to name a few In this section the regulationtheory is used to synchronize chaotic systems described by T-S discrete-time fuzzy models Both the drive system and theresponse system are modeled by the same attractor (Rosslerrsquosequation) with the difference that response system can beinfluenced by an input signal This type of synchronizationis known as Complete Synchronization (CS) [36]
Considering two Rossler chaotic oscillators as = 119891(119908)
(drive system) and = 119891(119909 119908 119906) (response system) theordinary differential equations of these systems are
1 = minus (1199082 + 1199083)
2 = 1199081 + 1198861199082
3 = 1198871199081 minus (119888 minus 1199081) 1199083
Rossler attractor
Drive system
1 = minus (1199092 + 1199093)
2 = 1199091 + 1198861199092
3 = 1198871199091 minus (119888 minus 1199091) 1199093 + 119906
Rossler attractor
Response system
(30)
According to [15] these systems can be exactly repre-sented by means of the following two-rule T-S fuzzy modelswhen 119886 119887 and 119888 are constants and 1199091 isin [119888 minus 119889 119888 + 119889] with119889 gt 0 Thus
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(31)
Mathematical Problems in Engineering 7
Begin
Random initial population
Individual performance evaluation
Reproduction Crossover Mutation
Anothergeneration
Membership functions performance
End
Yes
No
GA
Chromosome selection for reproduction
e s=
1 2(x
1kminusw1k)2
Obj
ectiv
e fun
ctio
n
Figure 3 Flowchart of genetic algorithms
where
1198601 =[[
[
0 minus1 minus1
1 119886 0
119887 0 minus119889
]]
]
1198781 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 minus119889119908
]]
]
1198602 =[[
[
0 minus1 minus1
1 119886 0
119887 0 119889
]]
]
1198782 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 119889119908
]]
]
1198611 = 1198612 = [0 0 1]119879
119862119894 = 119876119894 = [1 0 0]
(32)
Besides the membership functions for such systems are
ℎ11 (1199091) =1
2(1 +
119888 minus 1199091
119889)
ℎ12 (1199091) =1
2(1 minus
119888 minus 1199091
119889)
ℎ21 (1199081) =1
2(1 +
119888 minus 1199081
119889)
ℎ22 (1199081) =1
2(1 minus
119888 minus 1199081
119889)
(33)
Now the continuous-time T-S fuzzy model can be convertedto the following discrete counterpart by using [1]
119866119894 = exp (119860 119894119879119904) = 119868 + 119860 119894119879119904 + 1198602
119894
1198792
119904
2+ sdot sdot sdot
119867119894 = int
119879119904
0
exp (119860 119894120591) 119861i119889120591 = (119866119894 minus 119868)119860minus1
119894119861119894
(34)
Therefore the discrete-time T-S fuzzy model is given by
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(35)
where
1198601 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 1 minus 119889119879119904
]]
]
1198781 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 1 minus 119889119908119879119904
]]
]
1198602 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 119879119904119889 + 1
]]
]
1198782 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 119889119908119879119904 + 1
]]
]
1198611 = 1198612 = [0 0 119879119904]119879
119862119894 = 119876119894 = [1 0 0]
(36)
8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Begin
Random initial population
Individual performance evaluation
Reproduction Crossover Mutation
Anothergeneration
Membership functions performance
End
Yes
No
GA
Chromosome selection for reproduction
e s=
1 2(x
1kminusw1k)2
Obj
ectiv
e fun
ctio
n
Figure 3 Flowchart of genetic algorithms
where
1198601 =[[
[
0 minus1 minus1
1 119886 0
119887 0 minus119889
]]
]
1198781 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 minus119889119908
]]
]
1198602 =[[
[
0 minus1 minus1
1 119886 0
119887 0 119889
]]
]
1198782 =[[
[
0 minus1 minus1
1 119886119908 0
119887119908 0 119889119908
]]
]
1198611 = 1198612 = [0 0 1]119879
119862119894 = 119876119894 = [1 0 0]
(32)
Besides the membership functions for such systems are
ℎ11 (1199091) =1
2(1 +
119888 minus 1199091
119889)
ℎ12 (1199091) =1
2(1 minus
119888 minus 1199091
119889)
ℎ21 (1199081) =1
2(1 +
119888 minus 1199081
119889)
ℎ22 (1199081) =1
2(1 minus
119888 minus 1199081
119889)
(33)
Now the continuous-time T-S fuzzy model can be convertedto the following discrete counterpart by using [1]
119866119894 = exp (119860 119894119879119904) = 119868 + 119860 119894119879119904 + 1198602
119894
1198792
119904
2+ sdot sdot sdot
119867119894 = int
119879119904
0
exp (119860 119894120591) 119861i119889120591 = (119866119894 minus 119868)119860minus1
119894119861119894
(34)
Therefore the discrete-time T-S fuzzy model is given by
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(35)
where
1198601 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 1 minus 119889119879119904
]]
]
1198781 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 1 minus 119889119908119879119904
]]
]
1198602 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119879119904 + 1 0
119887119879119904 0 119879119904119889 + 1
]]
]
1198782 =[[
[
1 minus119879119904 minus119879119904
119879119904 119886119908119879119904 + 1 0
119887119908119879119904 0 119889119908119879119904 + 1
]]
]
1198611 = 1198612 = [0 0 119879119904]119879
119862119894 = 119876119894 = [1 0 0]
(36)
8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
00
5105
0
2
4
6
8
minus5
minus5
minus2
minus10minus10
x1x2
x3
Continuous-time fuzzy Roumlssler attractor
(a)
05
10
05
0
2
4
6
8
minus2
x1kx2k
x3k
minus5
minus5
minus10
Discrete-time fuzzy Roumlssler attractor
(b)
Figure 4 (a) Continuous T-S fuzzy model for a Rossler attractor and (b) discrete T-S fuzzy model for a Rossler attractor
Besides the membership functions for the T-S discrete-timefuzzy model are
ℎ11 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199091119896) =1
2(1 +
119888 minus 1199091119896
119889)
ℎ12 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
ℎ22 (1199081119896) =1
2(1 +
119888119908 minus 1199081119896
119889119908
)
(37)
with 119886 = 034 119887 = 04 119888 = 45 119889 = 10 119886119908 = 034 119887119908 = 04119888119908 = 45 119889119908 = 10 and 119879119904 as the sampling time
Figure 4(b) shows the trajectory of the discrete-timeversion of the continuous-time T-S fuzzy Rossler model with119879119904 = 000357 It can be seen that the overall shape of thetrajectory is similar to that in Figure 4(a)
Then by using the approach derived in this work andfrom (20) and (17) the zero error steady-state manifold120587(119908119896) = Π is
Π =[[
[
1 0 0
0 1 0
0 0 1
]]
]
(38)
Γ119894119895 are
Γ11 = [0 0 0]
Γ12 = [0 0 20]
Γ21 = [0 0 minus20]
Γ22 = [0 0 0]
(39)
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09980+00062119894 09980minus00062119894 09982]
(2) subsystem [09980+00062119894 09980minus00062119894 09982]
the following gains are obtained
1198701 = [31629 09257 80354]
1198702 = [31629 09257 minus119646]
(40)
Remark 5 It is important to verify that the fuzzy feedbackstabilizer is valid for the overall T-S fuzzy model by checkingthat the eigenvalues of the interpolation regions are inside theunit circle also [31]
Then by setting the initial conditions as 1199091119896 = 5 1199092119896 = 01199093119896 = 6 1199081119896 = 1 1199082119896 = 0 and 1199081119896 = 0 and by applyingthe controller (23) the results depicted in Figures 5 and 6 areobtained
The tracking for the drive states and response states isdrawn in Figure 7
41 Generalized Synchronization The discrete-time fuzzysynchronization problem is solvable when the conditions ofTheorem 3 are fulfilled However when two chaotic systemsare different fulfilling these conditions is not so commonThis is because the local regulators have different zero errorsteady-state manifolds in general [20] From the regulationpoint of view the problem can be seen as finding if it ispossible a transformation 120587 119908119896 rarr 119909119896 regarding mappingthe trajectories of the drive system into the ones of theresponse systems that is 119909119896 = 120587(119908119896) this is known asGeneralized Synchronization [37 38] and satisfies
lim119896rarrinfin
1003817100381710038171003817119909119896 (119909 (0)) minus 119908119896 (119908 (0))
1003817100381710038171003817= 0 (41)
with 119909(0) and 119908(0) as initial conditionsNow consider the chaotic drive system as = 119891(119908) and
= 119891(119909 119908 119906) as the response system
Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
0 5 10 15 20 25 30 35 40
0
5
10
Time
Am
plitu
de
minus10
minus5
minus15
Control uk
uk
Figure 5 Control signal for the Complete Synchronization of twodiscrete-time T-S fuzzy Rossler systems
0 5 10 15 20 25 30 35 40
01234
Time
Am
plitu
de
minus1
minus2
minus3
Tracking error e1k = x1k minus w1k
e1k
Figure 6 Tracking error signal for the Complete Synchronizationof two discrete-time T-S fuzzy Rossler systems
The equations for the aforementioned systems aredescribed as follows
1 = 120572 (1199082 minus 1199081)
2 = 1199031199081 minus 1199082 minus 11990811199083
3 = 11990811199082 minus 1205731199083
Lorenz Attractor
Drive system1 = 119886 (1199092 minus 1199091)
2 = (119888 minus 119886) 1199091 minus 11990911199093 + 1198881199092 + 119906
3 = 11990911199092 minus 1198871199093
Chenrsquos attractor
Response system
(42)
As before these systems can be exactly represented bymeans of the following two-rule continuous-time T-S fuzzymodels when 1199091 isin [119883min 119883max ] and 1199081 isin [11987211198722]Therefore
(119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119860 119894119909 (119905) + 119861119894119906 (119905)
(119905) =
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119878119894119908 (119905)
119890 (119905) =
2
sum
119894=1
ℎ1119894 (1199091 (119905)) 119862119894119909 (119905)
minus
2
sum
119894=1
ℎ2119894 (1199081 (119905)) 119876119894119908 (119905)
(43)
where
1198601 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883min
0 119883min minus119887
]]
]
1198781 =[[
[
minus120572 120572 0
119903 minus1 minus1198721
0 1198721 minus120573
]]
]
1198602 =[[
[
minus119886 119886 0
119888 minus 119886 119888 minus119883max
0 119883max minus119887
]]
]
1198782 =[[
[
minus120572 120572 0
119903 minus1 minus1198722
0 1198722 minus120573
]]
]
1198611 = 1198612 = [0 1 0]119879
119862119894 = 119876119894 = [1 0 0]
(44)
Then by using (34) the discrete counterpart is obtained
119909119896+1 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119860 119894119909119896 + 119861119894119906119896 + 119875119894119908119896
119908119896+1 =
2
sum
119894=1
ℎ2119894 (1199081119896) 119878119894119908119896
119890119896 =
2
sum
119894=1
ℎ1119894 (1199091119896) 119862119894119909119896 minus
2
sum
119894=1
ℎ2119894 (1199081119896) 119876119894119908119896
(45)
where
1198601 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883min119879119904
0 119879119904119883min 1 minus 119887119879119904
]]
]
1198781 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198721119879119904
0 1198721119879119904 1 minus 119887119908119879119904
]]
]
1198602 =[[
[
1 minus 119886119879119904 119886119879119904 0
minus (119886 minus 119888) 119879119904 119888119879119904 + 1 minus119883max119879119904
0 119879119904119883max 1 + 119887119879119904
]]
]
1198782 =[[
[
1 minus 119886119908119879119904 119886119908119879119904 0
119888119908119879119904 1 minus 119879119904 minus1198722119879119904
0 1198722119879119904 1 minus 119887119908119879119904
]]
]
10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus6
minus4
minus2
x1k versus w1k
x1kw1k
(a)
0 5 10 15 20 25 30 35 40
024
Am
plitu
de
minus6
minus4
minus2
minus8
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 40
02468
Am
plitu
de
minus2
minus4
x3k versus w3k
x3kw3k
(c)
Figure 7 States of drive and response tracking for a Complete Synchronization
1198611 = 1198612 = [0 119879119904 0]119879
119862119894 = 119876119894 = [1 0 0]
(46)
with 119886 = 35 119887 = 3 119888 = 28 119886119908 = 10 119887119908 = 83 and119888119908 = 28 and 119879119904 as the sampling time Notice that in thiscase the Generalized Synchronization problem consists ofthe tracking of 1199081 by 1199091 This can be inferred by the formof 119862119894 and 119876119894 The membership functions for this system aredefined as follows
Plant Membership Functions
ℎ11 (1199091119896) =
minus1199091119896 + 119883max
119883max minus 119883min
ℎ12 (1199091119896) =
1199091119896 minus 119883min
119883max minus 119883min
(47)
Exosystem Membership Functions
ℎ21 (1199081119896) =
minus1199081119896 +1198721
1198722 minus1198721
ℎ22 (1199081119896) =
1199081119896 minus1198722
1198722 minus1198721
(48)
They are depicted in Figure 8Figures 9(a) and 9(b) show the behavior of the two
discrete-time T-S fuzzy models with 119909(0) = [1 1 1]119879 and
119908(0) = [1 0 0]119879 Then by using the approach derived in
this work and from (20) and (17) the zero error steady-statemanifold for each subsystem is
Π11 =[[
[
1 0 0
07143 02857 0
30041 minus00143 12861
]]
]
Π12 =[[
[
1 0 0
07143 02857 0
30041 minus00143 minus12861
]]
]
Π21 =[[
[
1 0 0
07143 02857 0
minus30041 00143 minus12861
]]
]
Π22 =[[
[
1 0 0
07143 02857 0
minus30041 00143 12861
]]
]
(49)
Γ119894119895 are
Γ11 = [minus1022648 minus07142 minus300121]
Γ12 = [minus1022648 minus07142 300121]
Γ21 = [minus1022648 minus07142 minus300121]
Γ22 = [minus1022648 minus07142 300121]
(50)
Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
0
1
0
1
Xmin Xmax M1 M2
h11(x1k) h12(x1k) h21(w1k h22(w1k))
w1kx1k
Figure 8 Membership functions for Generalized Synchronization
02040 0
50
0
20
40
60
80Discrete-time fuzzy Chen attractor
minus50
minus40minus20
x1
x3
x2
(a)
010200
10
20
30
40
50
Discrete-time fuzzy Lorenz attractor
0
50
minus50
minus20minus10x1
x3
x2
(b)
Figure 9 (a) Discrete-time T-S fuzzy model for a Chen attractor and (b) discrete T-S fuzzy model for a Lorenz attractor
0 5 10 15 20 25 30 35 40
Am
plitu
de
050
100150
Time
minus50
minus100
minus150
Control uk
uk
Figure 10 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
On the other hand the fuzzy stabilizer for this system iscomputed by means of Ackermannrsquos formula and by locatingthe eigenvalues at
(1) subsystem [09596 09955 082](2) subsystem [09596 09955 082]
the following gains are obtained
1198701 = [minus143228 minus2149000 minus196566]
1198702 = [minus143228 minus2149000 196566]
(51)
Notice that the stability is ensured in the fuzzy interpolationregion by these gains for all 119905 ge 0
0 5 10 15 20 25 30 35 40Time
01234
Am
plitu
de
minus1minus2minus3minus4minus5
Tracking error e1k = x1k minus w1k
e1
Figure 11 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
As can be readily observed conditions of Theorem 3 arenot fulfilled because the zero error steady-state manifold isnot the same for the local regulators However the trackingerror can be bounded by using the controller defined in (22)Figures 10ndash12 depicted the behavior of the controller (22)with 119909(0) = [1 1 1]
119879 and 119908(0) = [1 0 0]119879 as the initial
conditions
42 Generalized Synchronization by Using Genetic AlgorithmsThe main objective of integrating genetic algorithms is toobtain values of the parameters (119886 119887 and 119888) of the newmembership functions of the regulator and reducing in this
12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
0 5 10 15 20 25 30 35 40
05
101520
Am
plitu
de
minus5minus10minus15minus20
x1kw1k
x1k versus w1k
(a)
0 5 10 15 20 25 30 35 40
0102030
Am
plitu
de
minus10
minus20
minus30
x2k versus w2k
x2kw2k
(b)
0 5 10 15 20 25 30 35 4005
101520253035404550
Am
plitu
de
x3k versus w3k
x3kw3k
(c)
Figure 12 States of drive and response system for a Generalized Synchronization
way the tracking error To this end it is important to considerthe following
(i) Consider the representation of the potential solutionsof the problem the common representation is binary
(ii) An initial population of possible solutions in arandom process is selected (population size affectsthe efficiency and performance of GA) For this casea population size equal to 20 chromosomes is chosen
(iii) A fitness function which indicates how good or bada certain solution is is defined In this case the fitnessfunction is the mean square tracking error given bythe following expression
119890119904 =1
2(1199091119896 minus 1199081119896)
2 (52)
For the representation of possible solutions it is necessaryto know the variables to optimize for this case it has 119886119894 and 119886119895parameters for 119894 = 1 2 and 119895 = 1 2 defined in (27) and (28)besides 119887119894 119887119895 119888119894 and 119888119895 will be fixed with a constant valuethat is 1198871 = 3 1198881 = 30 for (27) considering 12058312 = 1 minus 120583111198871 = 3 1198881 = 20 for (28) also considering 12058322 = 1 minus 12058321 Theabovementioned are represented in Figure 13
It is also important to know the interval value in whichthe variable 119886 will be operating for this case such intervalis 1199091119896 isin [minus30 30] Thus the size of each variable in bits
and the chromosome length can be computed by using thefollowing expression [39]
119878var = (int uarr) log2(limupper minus limlower) 10
accurate (53)
where 119878var is the size of each variable in bits the term (int uarr)is the decimal integer value and limupper = 30 and limlower =minus30with an accuracy in 3Therefore the variable size is equalto 16 bits but there are two variables 1198861 and 1198862 thus thechromosomes length is 32 bits Therefore the chromosomesare represented in Figure 14
The initial population is random binary To assess eachindividual in the objective function is needed to decode inthis case a real number To this end the following expressionis used
Var = [Decval (limupper minus limlower
2length(bit)
minus 1) + limlower] (54)
Var is a decimal value (phenotype) for each binary chromo-some (genotype) Decval is the decimal value for each binarystring and length(bit) is equal to 16 bits
In order to compute the individual aptitude is necessaryto introduce the value of each parameter in the bell-shapedmembership functions 1205831 and 1205832The tracking error function(52) disregards the nonoptimal solution and allows theoptimal performance by considering that 1199091119896 tracks 1199081119896 InTable 1 the individual aptitude is depicted
Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
Table 1 Individual aptitude
Chromosome Binary string Decoded integer Fitness function1 01011010001000100010111010101101 119891(minus7691493 minus16518837) 09711092 11001011101111111110101000000111 119891(15386557 21537530) 68403023 10100011000010001110111101010111 119891(7116228 22616648) 94044654 01101110111100100011110001011000 119891(minus3463890 minus13742489) 00967795 01111110110010001000111010000000 119891(minus0247166 2945754) 00173876 01111110110010001000111010000000 119891(minus2282414 minus24456703) 124383737 01110100110000110000011110011001 119891(minus13451286 16387121) 07613238 00111101110001111101000010101100 119891(4320043 minus25338247) 136862719 10010101010001000000001101000010 119891(19709377 4057404) 020969010 10000010001011110001000101110111 119891(0443946 minus22452399) 915932211 00111100101000111011110011100001 119891(minus13682979 12366613) 000074612 00001100011111011100101000101100 119891(minus23463279 15066789) 000089513 10010110000010001001010001111101 119891(4475563 4162142) 001757614 10110011010110110100100101111010 119891(10432136 minus11074846) 000102115 01010011101010101111101011001101 119891(minus9005478 24944686) 1303047116 00100011011001100011000000001011 119891(minus18809583 minus16241123) 039928017 10010001100100001111110100111101 119891(3567834 25439811) 1382547418 10001011001010110100111011110001 119891(2268925 minus9964782) 000384019 01100000011011101100000001001011 119891(minus6412421 13060105) 003942020 00001011110001010001010011000101 119891(minus23609277 minus21781125) 5130460
0 10 20 30
0
02
04
06
08
1
Initial membership functions
minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 13 Initial membership functions for the proposed fuzzy regulator tuned by GAs
1 1 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 1 0 1 0 0 0 1 1 1 0 0 1
a1 a2
Figure 14 Individual binary representation
14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
Each fitness function value is converted into a set point orfitness value To this end the following expression is used
fitnessval = 119865 (⋆) minus 119865min (55)
where 119865(⋆) is the fitness function value and 119865min is theminimum fitness function value
The two chromosomes with better fitness (elite chromo-somes) can live and produce offspring in the next generationThere are manymethods to select a pair of chromosomes themost popular one is named proportional selection method
(a) Calculate the total fitness value
fitness119879 =20
sum
119894=1
fitness (119894) (56)
(b) Compute the probability 119875119894 for each chromosome
119875119894 =fitness (119894)fitness119879
(57)
(c) Calculate the cumulative probability for each chro-mosome
119876119896 =
119894
sum
119896=0
119875119896 (58)
The total fitness value fitness119879 is equal to 8603420The probabilities 119875119894 and 119876119896 are shown in Table 2
(d) Generate a random number 119903 in the range [0 1](e) If 119876119894 minus 1 lt 119903 le 119876119894 then select the chromosome to be
the one of the parents(f) Repeat (d) and (e) to obtain the other parent
Apply crossover operation on the selected pair if theyhave been chosen for crossover (based on probability ofcrossover 119901119888 = 10) The most applied crossover operationis single point crossover Based on the probability of bitmutation 119901119898 = 001 flip the correspondent bit if selectedfor mutation At this point the process of producing a pairof offspring from two selected parents is finished
The elite chromosomes of the previous population are notsubject to mutation
In the following simulations the states 1199091119896 controlsignal 119906119896 and tracking error 1198901119896 depicted in Figures 16ndash18respectively are obtained after applying (29) and by replacingthe new membership functions adjusted by GAs The finalmembership functions after tuning the form parameter bymeans of GA are depicted in Figure 15 It can be readilyobserved that these new membership functions are differentfrom the original ones (see Figure 13) Notice that in thisexample the tracking error (Figure 18) is less than the errorobtained by using the approach discussed in Section 4This is due to the new membership functions which allowreducing considerably the tracking error This suggests thatthe approach presented in this work may be improved bytuning the parameters of center and amplitude in the newmembership functions however this study is not completedyet
Table 2 Individual aptitude
Chromosome 119875119894 119876119896
1 0011 00112 0080 00913 0109 02004 0001 02015 0000 02016 0145 03467 0009 03558 0159 05149 0002 051610 0106 062311 0000 062312 0000 062313 0000 062314 0000 062315 0151 077516 0005 077917 0161 094018 0000 094019 0000 094020 0060 1000
43 Pseudofuzzy Generalized Synchronization by Using GAsIn this section theGeneralized Synchronization by usingGAsand linear local regulator design will be addressed Howeverthe crossed terms within the local regulators are arbitrarilyremoved from the design processThus the steady-state input120574(119908119896) can be defined as
120574 (119908119896) =
1199031
sum
119894=1
1205831119894 (1199111119896) Γ119894119894119908119896 (59)
where 1205831119894(1199111119896) are new membership functions such thatthe fuzzy output regulator obtained from local regulatorsprovides the exact fuzzy output regulation This approachrequires the computation of the linear local controllers andthe computation of the new membership functions suchfunctions are represented by (27) and (28)Therefore the finalcontrol system is defined by
119906119896 =
1199031
sum
119894=1
ℎ1119894 (119909119896) 119896119894 119909119896 minus 120587 (119908119896) +
1199031
sum
119894=1
1205831119894 (119908119896) Γ119894119894119908119896 (60)
because 119911lowast119896 is a function of119909119896 and in steady-state119909119896 = 120587(119908119896)For this case the initial membership functions proposed
are shown in Figure 19 As it can be seen these membershipfunctions are not properly fuzzy because they do not fulfill theconvex sum that issum1199031
119894=1120583119894(119908119896) = 0 Even so these functions
will be adjusted by GAs in order to ensure the outputregulation by using input (60) The following simulationprovides a better behavior in the Lorenz-Chen discrete-timefuzzy system by using different membership function andtuning by GAs Such results are depicted in Figures 20ndash22
Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 15
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058311(x1k)
12058312(x1k)
(a)
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
12058321(w1k)
12058322(w1k)
(b)
Figure 15 Final membership functions for the proposed fuzzy regulator tuned by GAs
0 5 10 15 20 25 30 35 40
05
101520
Time
Am
plitu
de
minus5minus10minus15minus20
x1k versus w1k
x1kw1k
Figure 16 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0 5 10 15 20 25 30 35 40Time
Am
plitu
de
050
100150200
minus50minus100minus150minus200
Control uk
uk
Figure 17 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Notice that the final membership function depicted inFigure 23 is different from the initial proposed in Figure 19and also notice that the sum of these new interpolation
Am
plitu
de
0 5 10 15 20 25 30 35 40Time
005
minus05minus1
minus15minus2
minus25minus3
minus35minus4
minus45
Tracking error e1k = x1k minus w1k
e1k
Figure 18 Tracking error 1198901119896 signal for the Generalized Synchro-nization of Chen-Lorenz discrete-time T-S fuzzy systems
functions is not equal to one For that reason this approachis called Pseudofuzzy Generalized Synchronization
5 Conclusions
A fuzzy output regulator for discrete-time systems based onthe combination of linear regulators combined by differentmembership functions has been presented Synchronizationof discrete-time chaos attractors can be possible by meansof fuzzy output regulation sufficient conditions for thecontroller are given However when the conditions can notbe fulfilled new membership functions in the regulator areincluded these ones are optimized by genetic algorithmsThe main advantage is that membership functions whichallow the proper combination of the local regulators canbe easily obtained by means of GAs As a consequence thepresented result allows a very precise synchronization ofchaotic systems described by T-S discrete-time fuzzy modelson the basis of local regulators
16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

16 Mathematical Problems in Engineering
0
02
04
06
08
1
Initial membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 19 Initial membership functions for the pseudofuzzy regu-lator tuned by GAs
05
10152025
Am
plitu
de
minus5
minus15minus10
minus200 5 10 15 20 25 30 35 40
Time
x1k versus w1k
x1kw1k
Figure 20 States 1199091119896 and 1199081119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
050
100150200250300
Am
plitu
de
minus50minus100minus150minus200
0 5 10 15 20 25 30 35 40Time
Control uk
uk
Figure 21 Control signal for the Generalized Synchronization ofChen-Lorenz discrete-time T-S fuzzy systems
Complete and Generalized Synchronization are used toillustrate the applicability of the proposed approach Besidesthe method proposed in this work avoids the disadvantageof constructing an exact fuzzy regulator based on overall T-Sfuzzy system which may result to be very large Instead thegiven approach offers a simple way to design the complete
005
115
2
Time
Am
plitu
de
minus05
minus1
minus150 5 10 15 20 25 30 35 40
Tracking error e1k = x1k minus w1k
e1k
Figure 22 Tracking error 1198901119896 for the Generalized Synchronizationof Chen-Lorenz discrete-time T-S fuzzy systems
0
02
04
06
08
1
Final membership functions
0 10 20 30minus30 minus20 minus10
1205831(w1k)
1205832(w1k)
Figure 23 Final interpolation functions for the pseudofuzzy regu-lator tuned by GAs
regulator based on local regulators but with membershipfunctions optimized by soft computing
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is partially supported by Consejo Nacional deCiencia y Tecnologıa (CONACYT) through Scholarship SNIand by Instituto Politecnico Nacional (IPN) through researchProjects 20150487 and 20150794 and Scholarships COFAAEDI and BEIFI
References
[1] Z Li and G Chen Eds Integration of Fuzzy Logic and ChaosTheory vol 187 Springer Berlin Germany 2006
Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 17
[2] B Wang H Cao Y Wang and D Zhu ldquoLinear matrixinequality based fuzzy synchronization for fractional orderchaosrdquoMathematical Problems in Engineering vol 2015 ArticleID 128580 14 pages 2015
[3] I RechenbergOptimization of technical systems after the princi-ples of biological evolution [PhD thesis] Fromman-HolzboogStuttgart Germany 1971
[4] H-P Schwefel Numerical Optimization of Computer ModelsJohn Wiley amp Sons New York NY USA 1981
[5] H Bremermann The Evolution of Intelligence The NervousSystem as aModel of Its Environment University ofWashingtonDepartment of Mathematics 1958
[6] J H Holland ldquoOutline for a logical theory of adaptive systemsrdquoJournal of the ACM vol 9 no 3 pp 297ndash314 1962
[7] J H HollandAdaptation in Natural and Artificial Systems MITPress Cambridge Mass USA 1992
[8] D Fogel and R Anderson ldquoRevisiting Bremermannrsquos geneticalgorithm I Simultaneous mutation of all parametersrdquo inProceedings of the Congress on Evolutionary Computation vol2 pp 1204ndash1209 La Jolla Calif USA 2000
[9] I Rechenberg ldquoCybernetic solution path of an experimentalproblemrdquo in Royal Aircraft Establishment Translation No 1122B F Toms Ed Ministry of Aviation Royal Aircraft Establish-ment Farnborough Hants UK 1965
[10] C Hugenii ldquoHorologium oscillatorium (parisiis France 1973)rdquoTech Rep Iowa State University Press Ames Iowa 1986(English translation The pendulum clock)
[11] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
[12] K M Cuomo and A V Oppenheim ldquoCircuit implementationof synchronized chaos with applications to communicationsrdquoPhysical Review Letters vol 71 no 1 pp 65ndash68 1993
[13] M-L Hung and H-T Yau ldquoCircuit implementation and syn-chronization control of chaotic horizontal platform systems bywireless sensorsrdquo Mathematical Problems in Engineering vol2013 Article ID 903584 6 pages 2013
[14] I Zelinka S Celikovsky H Richter and G Chen EvolutionaryAlgorithms and Chaotic Systems Studies in ComputationalIntelligence Springer Berlin Germany 2010
[15] K Tanaka and H O Wang Fuzzy Control Systems Design andAnalysis A Linear Matrix Inequality Approach John Wiley ampSons New York NY USA 2001
[16] E Solak O Morgul and U Ersoy ldquoObserver-based control of aclass of chaotic systemsrdquo Physics Letters A vol 279 no 1-2 pp47ndash55 2001
[17] O Morgul and E Solak ldquoOn the synchronization of chaossystems by using state observersrdquo International Journal ofBifurcation and Chaos vol 7 no 6 pp 1307ndash1322 1997
[18] P Sangapate ldquoAdaptive control and synchronization of theshallow water modelrdquo Mathematical Problems in Engineeringvol 2012 Article ID 529251 9 pages 2012
[19] A Isidori and C I Byrnes ldquoOutput regulation of nonlinearsystemsrdquo IEEE Transactions on Automatic Control vol 35 no2 pp 131ndash140 1990
[20] J A Meda-Campana B Castillo-Toledo and G Chen ldquoSyn-chronization of chaotic systems from a fuzzy regulationapproachrdquo Fuzzy Sets and Systems vol 160 no 19 pp 2860ndash2875 2009
[21] R Tapia-Herrera J A Meda-Campana S Alcantara-MontesT Hernandez-Cortes and L Salgado-Conrado ldquoTuning of a
TS fuzzy output regulator using the steepest descent approachand ANFISrdquo Mathematical Problems in Engineering vol 2013Article ID 873430 14 pages 2013
[22] C I Byrnes FDelli Priscoli andA IsidoriOutput Regulation ofUncertain Nonlinear Systems Systems amp Control Foundationsamp Applications Birkhauser Boston Mass USA 1997
[23] A Isidori Nonlinear Control Systems Springer Berlin Ger-many 1995
[24] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem an LMI approachrdquoIEEE Transactions on Fuzzy Systems vol 12 no 3 pp 360ndash3672004
[25] B A Francis ldquoThe linear multivariable regulator problemrdquoSIAM Journal on Control and Optimization vol 15 no 3 pp486ndash505 1977
[26] L-X Wang A Course in Fuzzy Systems and Control PrenticeHall PTR Upper Saddle River NJ USA 1997
[27] B Castillo-Toledo J A Meda-Campana and A Titli ldquoAfuzzy output regulator for takagi-sugeno fuzzy modelsrdquo inProceedings of the IEEE International Symposium on IntelligentControl vol 2 pp 310ndash315Houston TexUSADecember 2003
[28] J A Meda-Campana and B Castillo-Toledo ldquoOn the outputregulation for TS fuzzymodels using slidingmodesrdquo inProceed-ings of the American Control Conference (ACC rsquo05) pp 4062ndash4067 Portland Ore USA June 2005
[29] H O Wang K Tanaka and M Griffin ldquoParallel distributedcompensation of nonlinear systems by Takagi-Sugeno fuzzymodelrdquo in Proceedings of the International Joint Conference ofthe 4th IEEE International Conference on Fuzzy Systems and theSecond International Fuzzy Engineering Symposium vol 2 pp531ndash538 Yokohama Japan March 1995
[30] K Tanaka andM Sugeno ldquoStability analysis and design of fuzzycontrol systemsrdquo Fuzzy Sets and Systems vol 45 no 2 pp 135ndash156 1992
[31] J A Meda-Campana J Rodriguez-Valdez T Hernandez-Cortes R Tapia-Herrera and V Nosov ldquoAnalysis of the fuzzycontrollability property and stabilization for a class of TndashS fuzzymodelsrdquo IEEE Transactions on Fuzzy Systems vol 23 no 2 pp291ndash301 2015
[32] I Abdelmalek N Golea and M Laid Hadjili ldquoA new fuzzyLyapunov approach to non-quadratic stabilization of Takagi-Sugeno fuzzy modelsrdquo International Journal of Applied Math-ematics and Computer Science vol 17 no 1 pp 39ndash51 2007
[33] B Castillo-Toledo and J A Meda-Campana ldquoThe fuzzydiscrete-time robust regulation problem a LMI approachrdquo inProceedings of the 41st IEEE Conference on Decision and Controlvol 2 pp 2159ndash2164 IEEE Las Vegas Nev USA December2002
[34] T Hernandez Cortes J Meda Campana L Paramo Carranzaand J Gomez Mancilla ldquoA simplified output regulator for aclass of takagi-sugeno fuzzy modelsrdquoMathematical Problems inEngineering vol 2015 Article ID 148173 18 pages 2015
[35] D E Goldberg Genetic Algorithms in Search Optimizationand Machine Learning Addison Wesley Longman PublishingBoston Mass USA 1st edition 1989
[36] K Pyragas ldquoWeak and strong synchronization of chaosrdquo Phys-ical Review E vol 54 no 5 pp R4508ndashR4511 1996
[37] L Kocarev and U Parlitz ldquoGeneralized synchronization pre-dictability and equivalence of unidirectionally coupled dynam-ical systemsrdquo Physical Review Letters vol 76 no 11 pp 1816ndash1819 1996
18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

18 Mathematical Problems in Engineering
[38] R He and P G Vaidya ldquoAnalysis and synthesis of synchronousperiodic and chaotic systemsrdquo Physical Review A vol 46 no 12pp 7387ndash7392 1992
[39] A H Wright ldquoGenetic algorithms for real parameter opti-mizationrdquo in Foundations of Genetic Algorithms pp 205ndash218Morgan Kaufmann Boston Mass USA 1991
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of