Embed Size (px)
Citation preview

Research ArticleAdaptive Synchronization of Chaotic Systems consideringPerformance Parameters of Operational Amplifiers
Sergio Ruiacutez-Hernaacutendez1 Eduardo Ortega-Torres1 Carlos Saacutenchez-Loacutepez1
Miguel Angel Carrasco-Aguilar1 Rocio Ochoa-Montiel1 Rocio Ilhuicatzi-Roldaacuten1
and Marco Antonio Taneco-Hernaacutendez2
1Autonomous University of Tlaxcala Czda Apizaquito SN 90300 Apizaco TLAX Mexico2Autonomous University of Guerrero Avenida Lazaro Cardenas SN 39087 Chilpancingo GRO Mexico
Correspondence should be addressed to Carlos Sanchez-Lopez carlsanmxyahoocommx
Received 5 October 2014 Revised 4 March 2015 Accepted 4 March 2015
Academic Editor Alkesh Punjabi
Copyright copy 2015 Sergio Ruız-Hernandez et alThis is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
This paper addresses an adaptive control approach for synchronizing two chaotic oscillators with saturated nonlinear functionseries as nonlinear functionsMathematical models to characterize the behavior of the transmitter and receiver circuit were derivedincluding in the latter the adaptive control and taking into account for both chaotic oscillators the most influential performanceparameters associated with operational amplifiers Asymptotic stability of the full synchronization system is studied by usingLyapunov direct method Theoretical derivations and related results are experimentally validated through implementations fromcommercially available devices Finally the full synchronization system can easily be reproducible at a low cost
1 Introduction
A deep research worldwide on the issue of synchronizationand control of chaotic waveforms has received a lot of atten-tion in the last years [1ndash20]This is due to the potential appli-cations of chaos in areas such as biomedical engineering bio-logical systems data-encryptionMEMs-chaos robot controlbased on chaos commonly referred as cooperation securecommunications and random number generation Partic-ularly in the second-last area synchronization of chaoticwaveforms plays an important role due to the possibilities ofencoding or masking data using as carrier the chaotic signalgenerated in the transmitter [1ndash6 11 12 18ndash20]The decodingor unmasking process takes place in the receiver which mustbe synchronized with the transmitter chaotic behavior and isable to recover the message imbedded into the transmittedchaotic signal On the one hand although different synchro-nization techniques can be found in the literature each ofthem has their advantages and disadvantages see [1ndash6 8 18ndash20] and the references therein On the other hand continuouschaotic waveforms are usually studied and generated from
a dimensionless dynamical system and a piecewise linear(PWL) model is often used to model the nonlinear part[6 8ndash12 15 18ndash20] After that to synchronize the chaoticsignal of the receiver with that coming from the transmittera synchronization technique is applied Once it is donethe dynamical systems (receiver and transmitter) along withthe synchronization block are commonly built with discretepassive and active electronic components [9 11 12 15 19]However the predicted numerically performance not onlyof both dynamical systems but also of the synchronizationblock differs substantially from reality These differencesare more prominent when the operating frequency of thedynamical systems is pushed to operate in higher frequenciesas required into any communication system The reason ofthat is the fact that no information related with the realphysical active device performance parameters is includedin the numerical simulations [18ndash20] Only in recent yearsthe works reported in [17 21 22] led the nonlinear behaviorof a third-order dynamical system including the most influ-ential performance parameters of Operational Amplifiers(Op Amp) and Current-Feedback Operational Amplifiers
Hindawi Publishing CorporationAdvances in Mathematical PhysicsVolume 2015 Article ID 919654 8 pageshttpdxdoiorg1011552015919654
2 Advances in Mathematical Physics
(CFOA) The nonlinear behavior of both dynamical systemswas validated through experimental tests confirming a goodagreement with numerical tests In this sense and for real-ization of communication systems based on chaos with highperformance it is of vital significance to take into accountthe real physical active device performance parameters inorder to develop communication systems with a practicallyusable performance [5] Therefore as natural evolution from[17 22] this paper leads to improving the synchronizationof multiscroll chaotic attractors by considering those moreimportant performance parameters associatedwith the activedevices used for synthesizing the dynamical systems andthe synchronization block in order to achieve a robust andcheap communication system based on chaos The outlineof the paper is the following an adaptive control law tosynchronize chaotic waveforms of the receiver with thatcoming from the transmitter is introduced in Section 2where the adaptive control is embedded in the receiverThenthe transmitter and receiver dynamical systems along withthe synchronization circuit are synthesized with Op Amps inSection 3 and their behavioral models are also introduced Inthe next section experimental results on the synchronizationare presented and compared with numerical simulationsFinally conclusions are listed in Section 5
2 Synchronization of Multiscroll ChaoticOscillators with Adaptive Control
A multiscroll chaotic system can be described by the follow-ing system of differential equations
119905(119905) = 119910
119905(119905)
119910
119905(119905) = 119911
119905(119905)
119905(119905) = 119886 (minus119909
119905(119905) minus 119910
119905(119905) minus 119911
119905(119905) + 119891 (119909
119905(119905)))
(1)
where 0 lt 119886 = 07 lt 1 is a parameter that is used toalter the dynamics of (1) the subscript ldquo119905rdquo is used to denotethe transmitter dynamical system and 119891(119909
119905(119905)) is a nonlinear
function that can be chosen arbitrarily but in general itdepends on the three states of the system Multiscroll chaoticattractors can be synchronized by some method proposed inthe literature Among them the control of chaotic systemsrefers to design stated feedback control laws that stabilizesthe chaotic waveforms either on a periodic orbit or aroundthe unstable equilibrium points [2 7 10 13 14 18ndash20] Inthis sense the active control technique is used when systemparameters are known whereas adaptive control technique isused when system parameters are unknown as often occursin practical situations The last technique is herein used andhence by including an adaptive controller in (1) takes theform
119903(119905) = 119910
119903(119905)
119910
119903(119905) = 119911
119903(119905)
119903(119905) = 119886 (minus119909
119903(119905) minus 119910
119903(119905) minus 119911
119903(119905) + 119891 (119909
119903(119905))) + 119906 (119905)
(2)
where the subscript ldquo119903rdquo is used to denote the receiverdynamical system and 119906(119905) is an external control input which
will drag the chaotic waveforms (119909119903(119905) 119910
119903(119905) 119911
119903(119905)) and given
as
119906 (119905) = 119896 (119905) (119911
119905(119905) minus 119911
119903(119905)) (3)
where 119896(119905) is the estimated feedback gain which is updatedaccording to the following adaption algorithm
119896 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905))2
119896 (0) = 0(4)
and 0 lt 1198961is an adaption gain Let us now define the state
errors between (1) and (2) as follows119890
119909(119905) = 119909
119905(119905) minus 119909
119903(119905)
119890
119910(119905) = 119910
119905(119905) minus 119910
119903(119905)
119890
119911(119905) = 119911
119905(119905) minus 119911
119903(119905)
(5)
Therefore the controlled resulting error system is describedby
119890
119909(119905) = 119890
119910(119905)
119890
119910(119905) = 119890
119911(119905)
119890
119911(119905) = minus 119886 (119890
119909(119905) + 119890
119910(119905) + 119890
119911(119905)
minus (119891 (119909
119905(119905)) minus119891 (119909
119903(119905)))) minus 119896 (119905) 119890
119911(119905)
119896 (119905) = 11989611198902119911(119905)
(6)
The synchronization target between (1) and (2) is to achievethe asymptotic stability of the zero solution of (6) in the sense
1003817
1003817
1003817
1003817
1003817
119890
119909(119905) 119890
119910(119905) 119890
119911(119905)
1003817
1003817
1003817
1003817
1003817
997888rarr 0 as 119905 997888rarr infin (7)
Preposition 1The zero solution of (6) is asymptotic stable for1198961 119886 gt 0
Proof We define Lyapunov function as
119881(119890
119909(119905) 119890
119910(119905) 119890
119911(119905) 119896 (119905))
=
12(119890
2119909(119905) + 119890
2119910(119905) + 119890
2119911(119905) +
(119896 (119905) minus 1198961)2
1198961)
(8)
The time derivative of (8) in the neighborhood of the zerosolution of (6) is given as
119881 (119890
119909(119905) 119890
119910(119905) 119890
119911(119905) 119896 (119905))
= minus (119890
119909(119905) + 119890
119911(119905)) (119886119890
119911(119905) minus 119890
119910(119905))
minus 119886119890
119911(119905) (119890
119910(119905) minus (119891 (119909
119905(119905)) minus119891 (119909
119903(119905))))
minus 11989611198902119911(119905)
(9)
Since 1198961 119886 gt 0 and if we take 119896
1= 119896(119905) it is clear
that (8) is positive definite whereas (9) is negative definiteFrom Lyapunov stability theorem one concludes that theequilibrium points given by (7) together with 119896
1ge 119896(119905) of
the system (6) are asymptotically stable [2 3] The proof iscompleted
Advances in Mathematical Physics 3
++
+ +
R R
++
RR
+ + +
Rx2
Ry
Rz
Rx
Cx
CyCzRy2
yt(t)
xt(t)
minusyt(t)
minusxt(t)
zt(t)
V1(xt(t)) V2(xt(t)) V3(xt(t))
Vs (xt(t))
i1(xt(t)) i2(xt(t)) i3(xt(t))
R1 R2 R3
i(xt(t))
Rs
minusminus
minusminusminusminus
minusminusminus
+Bp1 minusBp1
Figure 1 Multiscroll chaotic circuit based on Op Amps as transmitter
3 Synthesizing the Transmitter Receiver andAdaptive Control with Op Amps
Several nonlinear functions can be used for modeling119891(119909
119905119903(119905)) in (1) and (2) such as sgn(119909
119905119903(119905)) functions
staircase functions hysteresis functions saw-tooth functionsand herein a saturated nonlinear function series (SNFS)which is traditionally modeled by using a PWL approach[15] Moreover the dimensionless dynamical systems (1) and(2) can be built with either Op Amp [17] or CFOA [22] Inthis paper the former case is considered and the equivalentcircuit taken from [17] is shown in Figure 1 According to[17] and Figure 1 the system of equations is given by
119905(119905) =
119910
119905(119905)
119877
1199092119862119909
119910
119905(119905) =
119911
119905(119905)
119877
1199102119862119910
119905(119905)
= minus
119909
119905(119905)
119877
119909119862
119911
minus
119910
119905(119905)
119877
119910119862
119911
minus
119911
119905(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119905 (119905))
1198771+
1198812 (119909119905 (119905))
1198772+
1198813 (119909119905 (119905))
1198773)
1198811 (119909119905 (119905)) = 1199011 minus1198811 (119909119905 (119905))GB
119860DC
1198812 (119909119905 (119905)) = 1199012 minus1198812 (119909119905 (119905))GB
119860DC
1198813 (119909119905 (119905)) = 1199013 minus1198813 (119909119905 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119905 (119905)
GB (Bp1 minus 119909119905 (119905)) minus
SRGB
le Bp1 minus 119909119905 (119905) leSRGB
minusSR Bp1 minus 119909119905 (119905) lt minusSRGB
1199012 =
SR minus119909
119905(119905) gt
SRGB
GB (minus119909119905(119905)) minus
SRGB
le minus119909
119905(119905) le
SRGB
minusSR minus119909
119905(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119905 (119905) gtSRGB
GB (minusBp1 minus 119909119905 (119905)) minus
SRGB
le minusBp1 minus 119909119905 (119905) leSRGB
minusSR minusBp1 minus 119909119905 (119905) lt minusSRGB
(10)
whereplusmnBp1 are the breakpoints119860DC is theDCgainGB is thegain-bandwidth product SR is the slew rate and each voltagesignal 119881
123(119909
119905(119905)) is limited by 119881ns le 119881123(119909119905(119905)) le 119881ps
where 119881psns are the positive and negative saturation voltagesand the difference of them is the dynamic range (DR) foreach amplifier Additional information about Figure 1 andthe deduction of (10) can be found in [17] Notice that 119860DCGB SR and DR are the main performance parameters of anOp Amp [17 22] It is worth mentioning that (10) involvesthe nonlinear model for SNFS including the most influentialperformance parameters associated with Op Amps whereasthe rest of amplifiers those placed horizontally in Figure 1 areideally consideredThis is due to the fact that not only do theamplifiers placed horizontally have negative feedback loopsimproving their stability into a wide bandwidth but also thenonlinear behavior of the SNFS has a high influence in thegeneration of chaotic waveforms as has been demonstratedin [21] Nevertheless whether performance parameters forall amplifiers are taken into account during the numericalanalysis the chaotic waveforms in the time domain are notdrastically modified We want to point out that Figure 1becomes the transmitter block in a communication systembased on chaos and its chaotic behaviormust be synchronized
4 Advances in Mathematical Physics
+ +
+
AD633JN2
1
74
3 6
AD633JN3
2
71
4 6
AB
C
zt(t)
zr(t)
Ra
Rb
Rc Rd
Ca
Re
Re
Rf
Rf
u(t)
minus minus
minus
Figure 2 Synthesis of (11) with Op Amps and analog multipliers
++
+ +
R R
++
RR
+ + +
++
+AD
633JN
21
743
6
AD633JN
32
7
146
A
B
C
+ + +
R R
++
RR
+ + +
Transmitter circuit
Receiver circuit
Synchronization circuit
V1(xt(t)) V2(xt(t)) V3(xt(t))
Vs (xt(t))
V1(xr(t)) V2(xr(t)) V3(xr(t))
i1(xt(t)) i2(xt(t)) i3(xt(t))
i1(xr(t)) i2(xr(t)) i3(xr(t))
R1 R2 R3
R1 R2 R3
i(xt(t))Rs
i(xr(t))Rs
RyRx xt(t) minusxt(t)
RyRx xr(t) minusxr(t)
Rx2Cx
Rx2CxCa
Rz
Rz
CyCz
Cz
Ry2
CyRy2
yt(t)minusyt(t)zt(t)
zt(t)
zr(t)
yr(t)minusyr(t)zr(t)
ReRe
RfRf
u(t)
Ra
Rb
Rc
Rd
Rg
minus minus minus minus
minusminus
minus minus
minusminusminus
minus
minus
minus
minusminus
+Vs (xr(t))
minus
minusminusminusminus
+Bp1
+Bp1
minusBp1
minusBp1
Figure 3 Full synchronization system
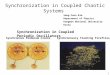
with the receiver which is a similar circuit Moreover thecontrol law given by (3) and (4) can be rewritten as
119906 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905)) int119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(11)
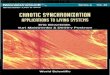
Figure 2 shows the design of (11) by using Op Amps andanalog multipliers According to the AD633JN data sheet[23] the output voltage on the node A of Figure 2 is givenby
VA (119905) =110(1198811 minus1198812) (1198813 minus1198814)
=
110(119911
119905(119905) minus 119911
119903(119905))
2
(12)
The behavior of a continuous integrator (omitting 119877119887) is
obtained on the node B and from (12) takes the form
VB (119905) =119877
119889
10119877119886119877
119888119862
119886
int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591 (13)
Note that 119877119887is a resistor with high value and in practice it
is used to prevent the integration from a zero voltage dropOtherwise the voltage on the node C is given as
VC (119905) =119877
119891
119877
119890
(119911
119905(119905) minus 119911
119903(119905)) (14)
Advances in Mathematical Physics 5
97531
minus1minus3minus5minus7minus9
0002 0006 0010 0014 0018
Time (s)
xt(t)x
r(t)
(V)
Figure 4 Time-domain chaotic waveforms for the transmitter (redline) and receiver (blue line) circuitswith the synchronization circuitdeactivated
Combining (13) and (14) along with the secondmultiplier weobtain
119906 (119905) =
119877
119889119877
119891
100119877119886119877
119888119877
119890119862
119886
(119911
119905(119905) minus 119911
119903(119905))
sdot int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(15)
The transmitter and receiver circuits shown in Figure 1 areconnected by using Figure 2 and hence the full synchroniza-tion system is got as shown in Figure 3 According to (2)(10) (15) and Figure 3 the behavioral model for the receivercircuit including the adaptive control is given by
119903(119905) =
119910
119903(119905)
119877
1199092119862119909
119910
119903(119905) =
119911
119903(119905)
119877
1199102119862119910
119903(119905)
= minus
119909
119903(119905)
119877
119909119862
119911
minus
119910
119903(119905)
119877
119910119862
119911
minus
119911
119903(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119903 (119905))
1198771+
1198812 (119909119903 (119905))
1198772+
1198813 (119909119903 (119905))
1198773)
+119896 (119905) (119911
119905(119905) minus 119911
119903(119905))
119896 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905))2
1198811 (119909119903 (119905)) = 1199011 minus1198811 (119909119903 (119905))GB
119860DC
1198812 (119909119903 (119905)) = 1199012 minus1198812 (119909119903 (119905))GB
119860DC
1198813 (119909119903 (119905)) = 1199013 minus1198813 (119909119903 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119903 (119905)
GB (Bp1 minus 119909119903 (119905)) minus
SRGB
le Bp1 minus 119909119903 (119905) leSRGB
minusSR Bp1 minus 119909119903 (119905) lt minusSRGB
1199012 =
SR minus119909
119903(119905) gt
SRGB
GB (minus119909119903(119905)) minus
SRGB
le minus119909
119903(119905) le
SRGB
minusSR minus119909
119903(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119903 (119905) gtSRGB
GB (minusBp1 minus 119909119903 (119905)) minus
SRGB
le minusBp1 minus 119909119903 (119905) leSRGB
minusSR minusBp1 minus 119909119903 (119905) lt minusSRGB
(16)
where 1198961= 119877
119889119877
119891100119877
119886119877
119888119877
119890119877
119892119862
119886119862
119911 Now that we have
the behavioral models for the transmitter and receiver alongwith the synchronization scheme given by (10) and (16)respectively we can use them to do numerical simulationsby using the fourth-order Runge-Kutta algorithm with timestep 2119890minus6 It is worth mentioning that unlike the synchro-nization methods previously reported PWL functions areused to design the nonlinear part of the chaotic oscillatorand as a consequence a level of inaccuracy is introducedinto a numerical analysis which is more evident whennumerical and experimental results are compared [17 21 22]Meanwhile the behavioral models previously deduced takeinto account the real physical active device parameters andhence the synchronization of chaotic waveforms between thetransmitter and receiver is better forecasted It is importantto stress that finite performance parameters of Op Amps arethe main limitation of that in practice the real behaviorof the SNFS (see Figure 7(b)) and the generation of chaoticattractors are both degraded when the operating frequencyof the chaotic system increases As one consequence theperformance of the synchronization scheme is also worsenedTherefore to gain insight and improve the synchronizationschemes used in communication systems based on chaosperformance parameters of the active devices must be takeninto account during the numerical simulations
4 Experimental Results
The chaotic oscillators were designed to oscillate in a centerfrequency of 345 kHz Table 1 gives the numerical values ofFigure 3 meanwhile Table 2 shows the performance param-eters of the UA741 Op Amp In a first step and with thesynchronization circuit deactivated chaotic waveforms for119909
119905(119905) and 119909
119903(119905) variables are generated and shown in Figure 4
For these graphics the following initial conditions were used119909
119905(0) = 01 119910
119905(0) = 01 119911
119905(0) = 001 and 119909
119903(0) =
0 119910119903(0) = 01 119911
119903(0) = 001 Note that the dynamical
systems are extremely sensitive with respect to differencesin initial conditions and although here it is not shown thechaotic waveforms for 119910
119905(119905) 119910119903(119905) 119911119905(119905) and 119911
119903(119905) variables
are also different In a second step the synchronization circuitwas activated and the results are depicted in Figure 5 Fromthis figure one can observe that the synchronization occurs
6 Advances in Mathematical Physics
0002 0006 0010 0014 0018
Time (s)
97531
minus1minus3minus5minus7minus9
xt(t)x
r(t)
(V)
(a)
0002 0006 0010 0014 0018
Time (s)
yt(t)y
r(t)
(V)
3
2
1
0
minus1
minus2
minus3
(b)
0002 0006 0010 0014 0018
Time (s)
3
2
1
0
minus1
minus2
minus3
z t(t)z r(t)
(V)
(c)
Figure 5 Time-domain chaotic waveforms for the transmitter (red line) and receiver (blue line) circuits with the synchronization circuitactivated (a) signals 119909
119905(119905) and 119909
119903(119905) (b) signals 119910
119905(119905) and 119910
119903(119905) and (c) signals 119911
119905(119905) and 119911
119903(119905)
Table 1 Component list from Figure 3
Element Value ToleranceTransmitter and receiver circuits
Op Amp UA741119877 10 kΩ plusmn5119877
119904500Ω potentiometer
119877
12340 kΩ plusmn5
119877
11990911991011991110 kΩ plusmn5
119877
119909211991027 kΩ plusmn5
119862
119909119910119911584 nF (345 kHz) plusmn20
plusmnBp1 plusmn45 VSynchronization circuit
Op Amp UA741Analog multiplier AD633JN119862
11988610 nF plusmn20
119877
11988615 kΩ potentiometer plusmn5
119877
11988747 kΩ plusmn5
119877
1198881 kΩ plusmn5
119877
11988910 kΩ plusmn5
119877
1198901 kΩ plusmn5
119877
11989110 kΩ plusmn5
119877
11989210 kΩ plusmn5
after 25ms Figure 6 shows the evolutions of state adaptivesynchronization errors between the transmitter and receiveroscillators respectively
To validate the results previously derived and demon-strate the real behavior of the synchronization schemethe proposed circuit illustrated in Figure 3 was built andexperimentally tested The numerical values of the discrete
Table 2 Performance parameters of the UA741 Op Amp
Parameter Value119860DC 10682 dBSR 22VusGB 272MHz119881ps 9 V119881ns minus9V119881dd plusmn11 V
0002 0006 0010 0014 0018
Time (s)
06
04
02
00
minus02minus04minus06e x
(t)e y(t)e z(t)
(V)
Figure 6The time responses for the state adaptive synchronizationerrors 119890
119909(119905) (red line) 119890
119910(119905) (blue line) and 119890
119911(119905) (black line)
components used during the numerical simulations were alsoused in the experimental tests but with a slight modificationof 119877119886in order that the discrete integrator is operating to
345 kHz Figure 7(a) shows the experimental results corre-sponding to the generation of 4-scrolls in the 119909
119905(119905)-versus-
119910
119905(119905) plane and Figure 7(b) shows the real behavior of the
SNFS A similar behavior is obtained for the SNFS and scrollson the receiver circuit Moreover whereas Figure 8(a) showstime-domain chaotic waveforms for 119911
119905(119905) and 119911
119903(119905) when
the synchronization circuit is deactivated Figure 8(b) shows
Advances in Mathematical Physics 7
Tek Stop DisplayType
Vectors
Format
XYContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode2V 1V
(a)
Tek Stop DisplayType
Vectors
Format
YT
ContrastIncrease
ContrastDecrease
CH1 XY ModeCH2 100mV2V
(b)
Figure 7 (a) Experimental verification of 4-scrolls in the transmitter circuit and (b) real behavior of the SNFS based on Op Amps
Tek
CH2 500mV
Trigrsquod M Pos 0 s Measure
CH1None
CH1None
CH1None
CH1None
CH1None
CH1 500mV M 500120583s CH10V
12
(a)
CH2CH1
Tek Trigrsquod M Pos 0 s MeasureCH1None
CH1None
CH1None
CH1None
CH1None
M 500120583s CH10V1
1
2
V 1V
(b)
Figure 8 Time-domain chaotic waveforms of the transmitter and receiver circuits and with the synchronization circuit (a) deactivated and(b) activated
Tek DisplayType
Vectors
FormatXY
ContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode
Trigrsquod
1V 1V
Figure 9 Synchronization phase diagram of the signals 119911119905(119905)-
versus-119911119903(119905)
the chaotic waveforms when the synchronization circuit isactivated Finally Figure 9 shows the synchronized signals in
the 119911119905(119905)-versus-119911
119903(119905) plane and a similar behavior also occurs
for the other state variables
5 Conclusions
Unlike the synchronization techniques reported in the liter-ature where a PWL function is used to model the nonlinearpart of a dynamical system herein the behavioral model ofthe dynamical system deduced in [17] was used as transmitterand receiver circuit in order to a posteriori be used into acommunication system based on chaos The most influen-tial performance parameters associated to Op Amps wereincluded to model principally the real behavior of the SNFSIn this context it is clear that the use of PWL models intro-duces a high level of inaccuracy as was already demonstratedin [17 21 22] and hence the use of PWL models are onlyfeasible at low frequency Furthermore an adaptive controllaw was proposed and synthesized with Op Amps and analogmultipliers showing that the synchronization between twononlinear dynamical systems is more accurate and realistic
8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Advances in Mathematical Physics
(CFOA) The nonlinear behavior of both dynamical systemswas validated through experimental tests confirming a goodagreement with numerical tests In this sense and for real-ization of communication systems based on chaos with highperformance it is of vital significance to take into accountthe real physical active device performance parameters inorder to develop communication systems with a practicallyusable performance [5] Therefore as natural evolution from[17 22] this paper leads to improving the synchronizationof multiscroll chaotic attractors by considering those moreimportant performance parameters associatedwith the activedevices used for synthesizing the dynamical systems andthe synchronization block in order to achieve a robust andcheap communication system based on chaos The outlineof the paper is the following an adaptive control law tosynchronize chaotic waveforms of the receiver with thatcoming from the transmitter is introduced in Section 2where the adaptive control is embedded in the receiverThenthe transmitter and receiver dynamical systems along withthe synchronization circuit are synthesized with Op Amps inSection 3 and their behavioral models are also introduced Inthe next section experimental results on the synchronizationare presented and compared with numerical simulationsFinally conclusions are listed in Section 5
2 Synchronization of Multiscroll ChaoticOscillators with Adaptive Control
A multiscroll chaotic system can be described by the follow-ing system of differential equations
119905(119905) = 119910
119905(119905)
119910
119905(119905) = 119911
119905(119905)
119905(119905) = 119886 (minus119909
119905(119905) minus 119910
119905(119905) minus 119911
119905(119905) + 119891 (119909
119905(119905)))
(1)
where 0 lt 119886 = 07 lt 1 is a parameter that is used toalter the dynamics of (1) the subscript ldquo119905rdquo is used to denotethe transmitter dynamical system and 119891(119909
119905(119905)) is a nonlinear
function that can be chosen arbitrarily but in general itdepends on the three states of the system Multiscroll chaoticattractors can be synchronized by some method proposed inthe literature Among them the control of chaotic systemsrefers to design stated feedback control laws that stabilizesthe chaotic waveforms either on a periodic orbit or aroundthe unstable equilibrium points [2 7 10 13 14 18ndash20] Inthis sense the active control technique is used when systemparameters are known whereas adaptive control technique isused when system parameters are unknown as often occursin practical situations The last technique is herein used andhence by including an adaptive controller in (1) takes theform
119903(119905) = 119910
119903(119905)
119910
119903(119905) = 119911
119903(119905)
119903(119905) = 119886 (minus119909
119903(119905) minus 119910
119903(119905) minus 119911
119903(119905) + 119891 (119909
119903(119905))) + 119906 (119905)
(2)
where the subscript ldquo119903rdquo is used to denote the receiverdynamical system and 119906(119905) is an external control input which
will drag the chaotic waveforms (119909119903(119905) 119910
119903(119905) 119911
119903(119905)) and given
as
119906 (119905) = 119896 (119905) (119911
119905(119905) minus 119911
119903(119905)) (3)
where 119896(119905) is the estimated feedback gain which is updatedaccording to the following adaption algorithm
119896 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905))2
119896 (0) = 0(4)
and 0 lt 1198961is an adaption gain Let us now define the state
errors between (1) and (2) as follows119890
119909(119905) = 119909
119905(119905) minus 119909
119903(119905)
119890
119910(119905) = 119910
119905(119905) minus 119910
119903(119905)
119890
119911(119905) = 119911
119905(119905) minus 119911
119903(119905)
(5)
Therefore the controlled resulting error system is describedby
119890
119909(119905) = 119890
119910(119905)
119890
119910(119905) = 119890
119911(119905)
119890
119911(119905) = minus 119886 (119890
119909(119905) + 119890
119910(119905) + 119890
119911(119905)
minus (119891 (119909
119905(119905)) minus119891 (119909
119903(119905)))) minus 119896 (119905) 119890
119911(119905)
119896 (119905) = 11989611198902119911(119905)
(6)
The synchronization target between (1) and (2) is to achievethe asymptotic stability of the zero solution of (6) in the sense
1003817
1003817
1003817
1003817
1003817
119890
119909(119905) 119890
119910(119905) 119890
119911(119905)
1003817
1003817
1003817
1003817
1003817
997888rarr 0 as 119905 997888rarr infin (7)
Preposition 1The zero solution of (6) is asymptotic stable for1198961 119886 gt 0
Proof We define Lyapunov function as
119881(119890
119909(119905) 119890
119910(119905) 119890
119911(119905) 119896 (119905))
=
12(119890
2119909(119905) + 119890
2119910(119905) + 119890
2119911(119905) +
(119896 (119905) minus 1198961)2
1198961)
(8)
The time derivative of (8) in the neighborhood of the zerosolution of (6) is given as
119881 (119890
119909(119905) 119890
119910(119905) 119890
119911(119905) 119896 (119905))
= minus (119890
119909(119905) + 119890
119911(119905)) (119886119890
119911(119905) minus 119890
119910(119905))
minus 119886119890
119911(119905) (119890
119910(119905) minus (119891 (119909
119905(119905)) minus119891 (119909
119903(119905))))
minus 11989611198902119911(119905)
(9)
Since 1198961 119886 gt 0 and if we take 119896
1= 119896(119905) it is clear
that (8) is positive definite whereas (9) is negative definiteFrom Lyapunov stability theorem one concludes that theequilibrium points given by (7) together with 119896
1ge 119896(119905) of
the system (6) are asymptotically stable [2 3] The proof iscompleted
Advances in Mathematical Physics 3
++
+ +
R R
++
RR
+ + +
Rx2
Ry
Rz
Rx
Cx
CyCzRy2
yt(t)
xt(t)
minusyt(t)
minusxt(t)
zt(t)
V1(xt(t)) V2(xt(t)) V3(xt(t))
Vs (xt(t))
i1(xt(t)) i2(xt(t)) i3(xt(t))
R1 R2 R3
i(xt(t))
Rs
minusminus
minusminusminusminus
minusminusminus
+Bp1 minusBp1
Figure 1 Multiscroll chaotic circuit based on Op Amps as transmitter
3 Synthesizing the Transmitter Receiver andAdaptive Control with Op Amps
Several nonlinear functions can be used for modeling119891(119909
119905119903(119905)) in (1) and (2) such as sgn(119909
119905119903(119905)) functions
staircase functions hysteresis functions saw-tooth functionsand herein a saturated nonlinear function series (SNFS)which is traditionally modeled by using a PWL approach[15] Moreover the dimensionless dynamical systems (1) and(2) can be built with either Op Amp [17] or CFOA [22] Inthis paper the former case is considered and the equivalentcircuit taken from [17] is shown in Figure 1 According to[17] and Figure 1 the system of equations is given by
119905(119905) =
119910
119905(119905)
119877
1199092119862119909
119910
119905(119905) =
119911
119905(119905)
119877
1199102119862119910
119905(119905)
= minus
119909
119905(119905)
119877
119909119862
119911
minus
119910
119905(119905)
119877
119910119862
119911
minus
119911
119905(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119905 (119905))
1198771+
1198812 (119909119905 (119905))
1198772+
1198813 (119909119905 (119905))
1198773)
1198811 (119909119905 (119905)) = 1199011 minus1198811 (119909119905 (119905))GB
119860DC
1198812 (119909119905 (119905)) = 1199012 minus1198812 (119909119905 (119905))GB
119860DC
1198813 (119909119905 (119905)) = 1199013 minus1198813 (119909119905 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119905 (119905)
GB (Bp1 minus 119909119905 (119905)) minus
SRGB
le Bp1 minus 119909119905 (119905) leSRGB
minusSR Bp1 minus 119909119905 (119905) lt minusSRGB
1199012 =
SR minus119909
119905(119905) gt
SRGB
GB (minus119909119905(119905)) minus
SRGB
le minus119909
119905(119905) le
SRGB
minusSR minus119909
119905(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119905 (119905) gtSRGB
GB (minusBp1 minus 119909119905 (119905)) minus
SRGB
le minusBp1 minus 119909119905 (119905) leSRGB
minusSR minusBp1 minus 119909119905 (119905) lt minusSRGB
(10)
whereplusmnBp1 are the breakpoints119860DC is theDCgainGB is thegain-bandwidth product SR is the slew rate and each voltagesignal 119881
123(119909
119905(119905)) is limited by 119881ns le 119881123(119909119905(119905)) le 119881ps
where 119881psns are the positive and negative saturation voltagesand the difference of them is the dynamic range (DR) foreach amplifier Additional information about Figure 1 andthe deduction of (10) can be found in [17] Notice that 119860DCGB SR and DR are the main performance parameters of anOp Amp [17 22] It is worth mentioning that (10) involvesthe nonlinear model for SNFS including the most influentialperformance parameters associated with Op Amps whereasthe rest of amplifiers those placed horizontally in Figure 1 areideally consideredThis is due to the fact that not only do theamplifiers placed horizontally have negative feedback loopsimproving their stability into a wide bandwidth but also thenonlinear behavior of the SNFS has a high influence in thegeneration of chaotic waveforms as has been demonstratedin [21] Nevertheless whether performance parameters forall amplifiers are taken into account during the numericalanalysis the chaotic waveforms in the time domain are notdrastically modified We want to point out that Figure 1becomes the transmitter block in a communication systembased on chaos and its chaotic behaviormust be synchronized
4 Advances in Mathematical Physics
+ +
+
AD633JN2
1
74
3 6
AD633JN3
2
71
4 6
AB
C
zt(t)
zr(t)
Ra
Rb
Rc Rd
Ca
Re
Re
Rf
Rf
u(t)
minus minus
minus
Figure 2 Synthesis of (11) with Op Amps and analog multipliers
++
+ +
R R
++
RR
+ + +
++
+AD
633JN
21
743
6
AD633JN
32
7
146
A
B
C
+ + +
R R
++
RR
+ + +
Transmitter circuit
Receiver circuit
Synchronization circuit
V1(xt(t)) V2(xt(t)) V3(xt(t))
Vs (xt(t))
V1(xr(t)) V2(xr(t)) V3(xr(t))
i1(xt(t)) i2(xt(t)) i3(xt(t))
i1(xr(t)) i2(xr(t)) i3(xr(t))
R1 R2 R3
R1 R2 R3
i(xt(t))Rs
i(xr(t))Rs
RyRx xt(t) minusxt(t)
RyRx xr(t) minusxr(t)
Rx2Cx
Rx2CxCa
Rz
Rz
CyCz
Cz
Ry2
CyRy2
yt(t)minusyt(t)zt(t)
zt(t)
zr(t)
yr(t)minusyr(t)zr(t)
ReRe
RfRf
u(t)
Ra
Rb
Rc
Rd
Rg
minus minus minus minus
minusminus
minus minus
minusminusminus
minus
minus
minus
minusminus
+Vs (xr(t))
minus
minusminusminusminus
+Bp1
+Bp1
minusBp1
minusBp1
Figure 3 Full synchronization system
with the receiver which is a similar circuit Moreover thecontrol law given by (3) and (4) can be rewritten as
119906 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905)) int119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(11)
Figure 2 shows the design of (11) by using Op Amps andanalog multipliers According to the AD633JN data sheet[23] the output voltage on the node A of Figure 2 is givenby
VA (119905) =110(1198811 minus1198812) (1198813 minus1198814)
=
110(119911
119905(119905) minus 119911
119903(119905))
2
(12)
The behavior of a continuous integrator (omitting 119877119887) is
obtained on the node B and from (12) takes the form
VB (119905) =119877
119889
10119877119886119877
119888119862
119886
int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591 (13)
Note that 119877119887is a resistor with high value and in practice it
is used to prevent the integration from a zero voltage dropOtherwise the voltage on the node C is given as
VC (119905) =119877
119891
119877
119890
(119911
119905(119905) minus 119911
119903(119905)) (14)
Advances in Mathematical Physics 5
97531
minus1minus3minus5minus7minus9
0002 0006 0010 0014 0018
Time (s)
xt(t)x
r(t)
(V)
Figure 4 Time-domain chaotic waveforms for the transmitter (redline) and receiver (blue line) circuitswith the synchronization circuitdeactivated
Combining (13) and (14) along with the secondmultiplier weobtain
119906 (119905) =
119877
119889119877
119891
100119877119886119877
119888119877
119890119862
119886
(119911
119905(119905) minus 119911
119903(119905))
sdot int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(15)
The transmitter and receiver circuits shown in Figure 1 areconnected by using Figure 2 and hence the full synchroniza-tion system is got as shown in Figure 3 According to (2)(10) (15) and Figure 3 the behavioral model for the receivercircuit including the adaptive control is given by
119903(119905) =
119910
119903(119905)
119877
1199092119862119909
119910
119903(119905) =
119911
119903(119905)
119877
1199102119862119910
119903(119905)
= minus
119909
119903(119905)
119877
119909119862
119911
minus
119910
119903(119905)
119877
119910119862
119911
minus
119911
119903(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119903 (119905))
1198771+
1198812 (119909119903 (119905))
1198772+
1198813 (119909119903 (119905))
1198773)
+119896 (119905) (119911
119905(119905) minus 119911
119903(119905))
119896 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905))2
1198811 (119909119903 (119905)) = 1199011 minus1198811 (119909119903 (119905))GB
119860DC
1198812 (119909119903 (119905)) = 1199012 minus1198812 (119909119903 (119905))GB
119860DC
1198813 (119909119903 (119905)) = 1199013 minus1198813 (119909119903 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119903 (119905)
GB (Bp1 minus 119909119903 (119905)) minus
SRGB
le Bp1 minus 119909119903 (119905) leSRGB
minusSR Bp1 minus 119909119903 (119905) lt minusSRGB
1199012 =
SR minus119909
119903(119905) gt
SRGB
GB (minus119909119903(119905)) minus
SRGB
le minus119909
119903(119905) le
SRGB
minusSR minus119909
119903(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119903 (119905) gtSRGB
GB (minusBp1 minus 119909119903 (119905)) minus
SRGB
le minusBp1 minus 119909119903 (119905) leSRGB
minusSR minusBp1 minus 119909119903 (119905) lt minusSRGB
(16)
where 1198961= 119877
119889119877
119891100119877
119886119877
119888119877
119890119877
119892119862
119886119862
119911 Now that we have
the behavioral models for the transmitter and receiver alongwith the synchronization scheme given by (10) and (16)respectively we can use them to do numerical simulationsby using the fourth-order Runge-Kutta algorithm with timestep 2119890minus6 It is worth mentioning that unlike the synchro-nization methods previously reported PWL functions areused to design the nonlinear part of the chaotic oscillatorand as a consequence a level of inaccuracy is introducedinto a numerical analysis which is more evident whennumerical and experimental results are compared [17 21 22]Meanwhile the behavioral models previously deduced takeinto account the real physical active device parameters andhence the synchronization of chaotic waveforms between thetransmitter and receiver is better forecasted It is importantto stress that finite performance parameters of Op Amps arethe main limitation of that in practice the real behaviorof the SNFS (see Figure 7(b)) and the generation of chaoticattractors are both degraded when the operating frequencyof the chaotic system increases As one consequence theperformance of the synchronization scheme is also worsenedTherefore to gain insight and improve the synchronizationschemes used in communication systems based on chaosperformance parameters of the active devices must be takeninto account during the numerical simulations
4 Experimental Results
The chaotic oscillators were designed to oscillate in a centerfrequency of 345 kHz Table 1 gives the numerical values ofFigure 3 meanwhile Table 2 shows the performance param-eters of the UA741 Op Amp In a first step and with thesynchronization circuit deactivated chaotic waveforms for119909
119905(119905) and 119909
119903(119905) variables are generated and shown in Figure 4
For these graphics the following initial conditions were used119909
119905(0) = 01 119910
119905(0) = 01 119911
119905(0) = 001 and 119909
119903(0) =
0 119910119903(0) = 01 119911
119903(0) = 001 Note that the dynamical
systems are extremely sensitive with respect to differencesin initial conditions and although here it is not shown thechaotic waveforms for 119910
119905(119905) 119910119903(119905) 119911119905(119905) and 119911
119903(119905) variables
are also different In a second step the synchronization circuitwas activated and the results are depicted in Figure 5 Fromthis figure one can observe that the synchronization occurs
6 Advances in Mathematical Physics
0002 0006 0010 0014 0018
Time (s)
97531
minus1minus3minus5minus7minus9
xt(t)x
r(t)
(V)
(a)
0002 0006 0010 0014 0018
Time (s)
yt(t)y
r(t)
(V)
3
2
1
0
minus1
minus2
minus3
(b)
0002 0006 0010 0014 0018
Time (s)
3
2
1
0
minus1
minus2
minus3
z t(t)z r(t)
(V)
(c)
Figure 5 Time-domain chaotic waveforms for the transmitter (red line) and receiver (blue line) circuits with the synchronization circuitactivated (a) signals 119909
119905(119905) and 119909
119903(119905) (b) signals 119910
119905(119905) and 119910
119903(119905) and (c) signals 119911
119905(119905) and 119911
119903(119905)
Table 1 Component list from Figure 3
Element Value ToleranceTransmitter and receiver circuits
Op Amp UA741119877 10 kΩ plusmn5119877
119904500Ω potentiometer
119877
12340 kΩ plusmn5
119877
11990911991011991110 kΩ plusmn5
119877
119909211991027 kΩ plusmn5
119862
119909119910119911584 nF (345 kHz) plusmn20
plusmnBp1 plusmn45 VSynchronization circuit
Op Amp UA741Analog multiplier AD633JN119862
11988610 nF plusmn20
119877
11988615 kΩ potentiometer plusmn5
119877
11988747 kΩ plusmn5
119877
1198881 kΩ plusmn5
119877
11988910 kΩ plusmn5
119877
1198901 kΩ plusmn5
119877
11989110 kΩ plusmn5
119877
11989210 kΩ plusmn5
after 25ms Figure 6 shows the evolutions of state adaptivesynchronization errors between the transmitter and receiveroscillators respectively
To validate the results previously derived and demon-strate the real behavior of the synchronization schemethe proposed circuit illustrated in Figure 3 was built andexperimentally tested The numerical values of the discrete
Table 2 Performance parameters of the UA741 Op Amp
Parameter Value119860DC 10682 dBSR 22VusGB 272MHz119881ps 9 V119881ns minus9V119881dd plusmn11 V
0002 0006 0010 0014 0018
Time (s)
06
04
02
00
minus02minus04minus06e x
(t)e y(t)e z(t)
(V)
Figure 6The time responses for the state adaptive synchronizationerrors 119890
119909(119905) (red line) 119890
119910(119905) (blue line) and 119890
119911(119905) (black line)
components used during the numerical simulations were alsoused in the experimental tests but with a slight modificationof 119877119886in order that the discrete integrator is operating to
345 kHz Figure 7(a) shows the experimental results corre-sponding to the generation of 4-scrolls in the 119909
119905(119905)-versus-
119910
119905(119905) plane and Figure 7(b) shows the real behavior of the
SNFS A similar behavior is obtained for the SNFS and scrollson the receiver circuit Moreover whereas Figure 8(a) showstime-domain chaotic waveforms for 119911
119905(119905) and 119911
119903(119905) when
the synchronization circuit is deactivated Figure 8(b) shows
Advances in Mathematical Physics 7
Tek Stop DisplayType
Vectors
Format
XYContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode2V 1V
(a)
Tek Stop DisplayType
Vectors
Format
YT
ContrastIncrease
ContrastDecrease
CH1 XY ModeCH2 100mV2V
(b)
Figure 7 (a) Experimental verification of 4-scrolls in the transmitter circuit and (b) real behavior of the SNFS based on Op Amps
Tek
CH2 500mV
Trigrsquod M Pos 0 s Measure
CH1None
CH1None
CH1None
CH1None
CH1None
CH1 500mV M 500120583s CH10V
12
(a)
CH2CH1
Tek Trigrsquod M Pos 0 s MeasureCH1None
CH1None
CH1None
CH1None
CH1None
M 500120583s CH10V1
1
2
V 1V
(b)
Figure 8 Time-domain chaotic waveforms of the transmitter and receiver circuits and with the synchronization circuit (a) deactivated and(b) activated
Tek DisplayType
Vectors
FormatXY
ContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode
Trigrsquod
1V 1V
Figure 9 Synchronization phase diagram of the signals 119911119905(119905)-
versus-119911119903(119905)
the chaotic waveforms when the synchronization circuit isactivated Finally Figure 9 shows the synchronized signals in
the 119911119905(119905)-versus-119911
119903(119905) plane and a similar behavior also occurs
for the other state variables
5 Conclusions
Unlike the synchronization techniques reported in the liter-ature where a PWL function is used to model the nonlinearpart of a dynamical system herein the behavioral model ofthe dynamical system deduced in [17] was used as transmitterand receiver circuit in order to a posteriori be used into acommunication system based on chaos The most influen-tial performance parameters associated to Op Amps wereincluded to model principally the real behavior of the SNFSIn this context it is clear that the use of PWL models intro-duces a high level of inaccuracy as was already demonstratedin [17 21 22] and hence the use of PWL models are onlyfeasible at low frequency Furthermore an adaptive controllaw was proposed and synthesized with Op Amps and analogmultipliers showing that the synchronization between twononlinear dynamical systems is more accurate and realistic
8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Advances in Mathematical Physics 3
++
+ +
R R
++
RR
+ + +
Rx2
Ry
Rz
Rx
Cx
CyCzRy2
yt(t)
xt(t)
minusyt(t)
minusxt(t)
zt(t)
V1(xt(t)) V2(xt(t)) V3(xt(t))
Vs (xt(t))
i1(xt(t)) i2(xt(t)) i3(xt(t))
R1 R2 R3
i(xt(t))
Rs
minusminus
minusminusminusminus
minusminusminus
+Bp1 minusBp1
Figure 1 Multiscroll chaotic circuit based on Op Amps as transmitter
3 Synthesizing the Transmitter Receiver andAdaptive Control with Op Amps
Several nonlinear functions can be used for modeling119891(119909
119905119903(119905)) in (1) and (2) such as sgn(119909
119905119903(119905)) functions
staircase functions hysteresis functions saw-tooth functionsand herein a saturated nonlinear function series (SNFS)which is traditionally modeled by using a PWL approach[15] Moreover the dimensionless dynamical systems (1) and(2) can be built with either Op Amp [17] or CFOA [22] Inthis paper the former case is considered and the equivalentcircuit taken from [17] is shown in Figure 1 According to[17] and Figure 1 the system of equations is given by
119905(119905) =
119910
119905(119905)
119877
1199092119862119909
119910
119905(119905) =
119911
119905(119905)
119877
1199102119862119910
119905(119905)
= minus
119909
119905(119905)
119877
119909119862
119911
minus
119910
119905(119905)
119877
119910119862
119911
minus
119911
119905(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119905 (119905))
1198771+
1198812 (119909119905 (119905))
1198772+
1198813 (119909119905 (119905))
1198773)
1198811 (119909119905 (119905)) = 1199011 minus1198811 (119909119905 (119905))GB
119860DC
1198812 (119909119905 (119905)) = 1199012 minus1198812 (119909119905 (119905))GB
119860DC
1198813 (119909119905 (119905)) = 1199013 minus1198813 (119909119905 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119905 (119905)
GB (Bp1 minus 119909119905 (119905)) minus
SRGB
le Bp1 minus 119909119905 (119905) leSRGB
minusSR Bp1 minus 119909119905 (119905) lt minusSRGB
1199012 =
SR minus119909
119905(119905) gt
SRGB
GB (minus119909119905(119905)) minus
SRGB
le minus119909
119905(119905) le
SRGB
minusSR minus119909
119905(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119905 (119905) gtSRGB
GB (minusBp1 minus 119909119905 (119905)) minus
SRGB
le minusBp1 minus 119909119905 (119905) leSRGB
minusSR minusBp1 minus 119909119905 (119905) lt minusSRGB
(10)
whereplusmnBp1 are the breakpoints119860DC is theDCgainGB is thegain-bandwidth product SR is the slew rate and each voltagesignal 119881
123(119909
119905(119905)) is limited by 119881ns le 119881123(119909119905(119905)) le 119881ps
where 119881psns are the positive and negative saturation voltagesand the difference of them is the dynamic range (DR) foreach amplifier Additional information about Figure 1 andthe deduction of (10) can be found in [17] Notice that 119860DCGB SR and DR are the main performance parameters of anOp Amp [17 22] It is worth mentioning that (10) involvesthe nonlinear model for SNFS including the most influentialperformance parameters associated with Op Amps whereasthe rest of amplifiers those placed horizontally in Figure 1 areideally consideredThis is due to the fact that not only do theamplifiers placed horizontally have negative feedback loopsimproving their stability into a wide bandwidth but also thenonlinear behavior of the SNFS has a high influence in thegeneration of chaotic waveforms as has been demonstratedin [21] Nevertheless whether performance parameters forall amplifiers are taken into account during the numericalanalysis the chaotic waveforms in the time domain are notdrastically modified We want to point out that Figure 1becomes the transmitter block in a communication systembased on chaos and its chaotic behaviormust be synchronized
4 Advances in Mathematical Physics
+ +
+
AD633JN2
1
74
3 6
AD633JN3
2
71
4 6
AB
C
zt(t)
zr(t)
Ra
Rb
Rc Rd
Ca
Re
Re
Rf
Rf
u(t)
minus minus
minus
Figure 2 Synthesis of (11) with Op Amps and analog multipliers
++
+ +
R R
++
RR
+ + +
++
+AD
633JN
21
743
6
AD633JN
32
7
146
A
B
C
+ + +
R R
++
RR
+ + +
Transmitter circuit
Receiver circuit
Synchronization circuit
V1(xt(t)) V2(xt(t)) V3(xt(t))
Vs (xt(t))
V1(xr(t)) V2(xr(t)) V3(xr(t))
i1(xt(t)) i2(xt(t)) i3(xt(t))
i1(xr(t)) i2(xr(t)) i3(xr(t))
R1 R2 R3
R1 R2 R3
i(xt(t))Rs
i(xr(t))Rs
RyRx xt(t) minusxt(t)
RyRx xr(t) minusxr(t)
Rx2Cx
Rx2CxCa
Rz
Rz
CyCz
Cz
Ry2
CyRy2
yt(t)minusyt(t)zt(t)
zt(t)
zr(t)
yr(t)minusyr(t)zr(t)
ReRe
RfRf
u(t)
Ra
Rb
Rc
Rd
Rg
minus minus minus minus
minusminus
minus minus
minusminusminus
minus
minus
minus
minusminus
+Vs (xr(t))
minus
minusminusminusminus
+Bp1
+Bp1
minusBp1
minusBp1
Figure 3 Full synchronization system
with the receiver which is a similar circuit Moreover thecontrol law given by (3) and (4) can be rewritten as
119906 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905)) int119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(11)
Figure 2 shows the design of (11) by using Op Amps andanalog multipliers According to the AD633JN data sheet[23] the output voltage on the node A of Figure 2 is givenby
VA (119905) =110(1198811 minus1198812) (1198813 minus1198814)
=
110(119911
119905(119905) minus 119911
119903(119905))
2
(12)
The behavior of a continuous integrator (omitting 119877119887) is
obtained on the node B and from (12) takes the form
VB (119905) =119877
119889
10119877119886119877
119888119862
119886
int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591 (13)
Note that 119877119887is a resistor with high value and in practice it
is used to prevent the integration from a zero voltage dropOtherwise the voltage on the node C is given as
VC (119905) =119877
119891
119877
119890
(119911
119905(119905) minus 119911
119903(119905)) (14)
Advances in Mathematical Physics 5
97531
minus1minus3minus5minus7minus9
0002 0006 0010 0014 0018
Time (s)
xt(t)x
r(t)
(V)
Figure 4 Time-domain chaotic waveforms for the transmitter (redline) and receiver (blue line) circuitswith the synchronization circuitdeactivated
Combining (13) and (14) along with the secondmultiplier weobtain
119906 (119905) =
119877
119889119877
119891
100119877119886119877
119888119877
119890119862
119886
(119911
119905(119905) minus 119911
119903(119905))
sdot int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(15)
The transmitter and receiver circuits shown in Figure 1 areconnected by using Figure 2 and hence the full synchroniza-tion system is got as shown in Figure 3 According to (2)(10) (15) and Figure 3 the behavioral model for the receivercircuit including the adaptive control is given by
119903(119905) =
119910
119903(119905)
119877
1199092119862119909
119910
119903(119905) =
119911
119903(119905)
119877
1199102119862119910
119903(119905)
= minus
119909
119903(119905)
119877
119909119862
119911
minus
119910
119903(119905)
119877
119910119862
119911
minus
119911
119903(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119903 (119905))
1198771+
1198812 (119909119903 (119905))
1198772+
1198813 (119909119903 (119905))
1198773)
+119896 (119905) (119911
119905(119905) minus 119911
119903(119905))
119896 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905))2
1198811 (119909119903 (119905)) = 1199011 minus1198811 (119909119903 (119905))GB
119860DC
1198812 (119909119903 (119905)) = 1199012 minus1198812 (119909119903 (119905))GB
119860DC
1198813 (119909119903 (119905)) = 1199013 minus1198813 (119909119903 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119903 (119905)
GB (Bp1 minus 119909119903 (119905)) minus
SRGB
le Bp1 minus 119909119903 (119905) leSRGB
minusSR Bp1 minus 119909119903 (119905) lt minusSRGB
1199012 =
SR minus119909
119903(119905) gt
SRGB
GB (minus119909119903(119905)) minus
SRGB
le minus119909
119903(119905) le
SRGB
minusSR minus119909
119903(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119903 (119905) gtSRGB
GB (minusBp1 minus 119909119903 (119905)) minus
SRGB
le minusBp1 minus 119909119903 (119905) leSRGB
minusSR minusBp1 minus 119909119903 (119905) lt minusSRGB
(16)
where 1198961= 119877
119889119877
119891100119877
119886119877
119888119877
119890119877
119892119862
119886119862
119911 Now that we have
the behavioral models for the transmitter and receiver alongwith the synchronization scheme given by (10) and (16)respectively we can use them to do numerical simulationsby using the fourth-order Runge-Kutta algorithm with timestep 2119890minus6 It is worth mentioning that unlike the synchro-nization methods previously reported PWL functions areused to design the nonlinear part of the chaotic oscillatorand as a consequence a level of inaccuracy is introducedinto a numerical analysis which is more evident whennumerical and experimental results are compared [17 21 22]Meanwhile the behavioral models previously deduced takeinto account the real physical active device parameters andhence the synchronization of chaotic waveforms between thetransmitter and receiver is better forecasted It is importantto stress that finite performance parameters of Op Amps arethe main limitation of that in practice the real behaviorof the SNFS (see Figure 7(b)) and the generation of chaoticattractors are both degraded when the operating frequencyof the chaotic system increases As one consequence theperformance of the synchronization scheme is also worsenedTherefore to gain insight and improve the synchronizationschemes used in communication systems based on chaosperformance parameters of the active devices must be takeninto account during the numerical simulations
4 Experimental Results
The chaotic oscillators were designed to oscillate in a centerfrequency of 345 kHz Table 1 gives the numerical values ofFigure 3 meanwhile Table 2 shows the performance param-eters of the UA741 Op Amp In a first step and with thesynchronization circuit deactivated chaotic waveforms for119909
119905(119905) and 119909
119903(119905) variables are generated and shown in Figure 4
For these graphics the following initial conditions were used119909
119905(0) = 01 119910
119905(0) = 01 119911
119905(0) = 001 and 119909
119903(0) =
0 119910119903(0) = 01 119911
119903(0) = 001 Note that the dynamical
systems are extremely sensitive with respect to differencesin initial conditions and although here it is not shown thechaotic waveforms for 119910
119905(119905) 119910119903(119905) 119911119905(119905) and 119911
119903(119905) variables
are also different In a second step the synchronization circuitwas activated and the results are depicted in Figure 5 Fromthis figure one can observe that the synchronization occurs
6 Advances in Mathematical Physics
0002 0006 0010 0014 0018
Time (s)
97531
minus1minus3minus5minus7minus9
xt(t)x
r(t)
(V)
(a)
0002 0006 0010 0014 0018
Time (s)
yt(t)y
r(t)
(V)
3
2
1
0
minus1
minus2
minus3
(b)
0002 0006 0010 0014 0018
Time (s)
3
2
1
0
minus1
minus2
minus3
z t(t)z r(t)
(V)
(c)
Figure 5 Time-domain chaotic waveforms for the transmitter (red line) and receiver (blue line) circuits with the synchronization circuitactivated (a) signals 119909
119905(119905) and 119909
119903(119905) (b) signals 119910
119905(119905) and 119910
119903(119905) and (c) signals 119911
119905(119905) and 119911
119903(119905)
Table 1 Component list from Figure 3
Element Value ToleranceTransmitter and receiver circuits
Op Amp UA741119877 10 kΩ plusmn5119877
119904500Ω potentiometer
119877
12340 kΩ plusmn5
119877
11990911991011991110 kΩ plusmn5
119877
119909211991027 kΩ plusmn5
119862
119909119910119911584 nF (345 kHz) plusmn20
plusmnBp1 plusmn45 VSynchronization circuit
Op Amp UA741Analog multiplier AD633JN119862
11988610 nF plusmn20
119877
11988615 kΩ potentiometer plusmn5
119877
11988747 kΩ plusmn5
119877
1198881 kΩ plusmn5
119877
11988910 kΩ plusmn5
119877
1198901 kΩ plusmn5
119877
11989110 kΩ plusmn5
119877
11989210 kΩ plusmn5
after 25ms Figure 6 shows the evolutions of state adaptivesynchronization errors between the transmitter and receiveroscillators respectively
To validate the results previously derived and demon-strate the real behavior of the synchronization schemethe proposed circuit illustrated in Figure 3 was built andexperimentally tested The numerical values of the discrete
Table 2 Performance parameters of the UA741 Op Amp
Parameter Value119860DC 10682 dBSR 22VusGB 272MHz119881ps 9 V119881ns minus9V119881dd plusmn11 V
0002 0006 0010 0014 0018
Time (s)
06
04
02
00
minus02minus04minus06e x
(t)e y(t)e z(t)
(V)
Figure 6The time responses for the state adaptive synchronizationerrors 119890
119909(119905) (red line) 119890
119910(119905) (blue line) and 119890
119911(119905) (black line)
components used during the numerical simulations were alsoused in the experimental tests but with a slight modificationof 119877119886in order that the discrete integrator is operating to
345 kHz Figure 7(a) shows the experimental results corre-sponding to the generation of 4-scrolls in the 119909
119905(119905)-versus-
119910
119905(119905) plane and Figure 7(b) shows the real behavior of the
SNFS A similar behavior is obtained for the SNFS and scrollson the receiver circuit Moreover whereas Figure 8(a) showstime-domain chaotic waveforms for 119911
119905(119905) and 119911
119903(119905) when
the synchronization circuit is deactivated Figure 8(b) shows
Advances in Mathematical Physics 7
Tek Stop DisplayType
Vectors
Format
XYContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode2V 1V
(a)
Tek Stop DisplayType
Vectors
Format
YT
ContrastIncrease
ContrastDecrease
CH1 XY ModeCH2 100mV2V
(b)
Figure 7 (a) Experimental verification of 4-scrolls in the transmitter circuit and (b) real behavior of the SNFS based on Op Amps
Tek
CH2 500mV
Trigrsquod M Pos 0 s Measure
CH1None
CH1None
CH1None
CH1None
CH1None
CH1 500mV M 500120583s CH10V
12
(a)
CH2CH1
Tek Trigrsquod M Pos 0 s MeasureCH1None
CH1None
CH1None
CH1None
CH1None
M 500120583s CH10V1
1
2
V 1V
(b)
Figure 8 Time-domain chaotic waveforms of the transmitter and receiver circuits and with the synchronization circuit (a) deactivated and(b) activated
Tek DisplayType
Vectors
FormatXY
ContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode
Trigrsquod
1V 1V
Figure 9 Synchronization phase diagram of the signals 119911119905(119905)-
versus-119911119903(119905)
the chaotic waveforms when the synchronization circuit isactivated Finally Figure 9 shows the synchronized signals in
the 119911119905(119905)-versus-119911
119903(119905) plane and a similar behavior also occurs
for the other state variables
5 Conclusions
Unlike the synchronization techniques reported in the liter-ature where a PWL function is used to model the nonlinearpart of a dynamical system herein the behavioral model ofthe dynamical system deduced in [17] was used as transmitterand receiver circuit in order to a posteriori be used into acommunication system based on chaos The most influen-tial performance parameters associated to Op Amps wereincluded to model principally the real behavior of the SNFSIn this context it is clear that the use of PWL models intro-duces a high level of inaccuracy as was already demonstratedin [17 21 22] and hence the use of PWL models are onlyfeasible at low frequency Furthermore an adaptive controllaw was proposed and synthesized with Op Amps and analogmultipliers showing that the synchronization between twononlinear dynamical systems is more accurate and realistic
8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Advances in Mathematical Physics
+ +
+
AD633JN2
1
74
3 6
AD633JN3
2
71
4 6
AB
C
zt(t)
zr(t)
Ra
Rb
Rc Rd
Ca
Re
Re
Rf
Rf
u(t)
minus minus
minus
Figure 2 Synthesis of (11) with Op Amps and analog multipliers
++
+ +
R R
++
RR
+ + +
++
+AD
633JN
21
743
6
AD633JN
32
7
146
A
B
C
+ + +
R R
++
RR
+ + +
Transmitter circuit
Receiver circuit
Synchronization circuit
V1(xt(t)) V2(xt(t)) V3(xt(t))
Vs (xt(t))
V1(xr(t)) V2(xr(t)) V3(xr(t))
i1(xt(t)) i2(xt(t)) i3(xt(t))
i1(xr(t)) i2(xr(t)) i3(xr(t))
R1 R2 R3
R1 R2 R3
i(xt(t))Rs
i(xr(t))Rs
RyRx xt(t) minusxt(t)
RyRx xr(t) minusxr(t)
Rx2Cx
Rx2CxCa
Rz
Rz
CyCz
Cz
Ry2
CyRy2
yt(t)minusyt(t)zt(t)
zt(t)
zr(t)
yr(t)minusyr(t)zr(t)
ReRe
RfRf
u(t)
Ra
Rb
Rc
Rd
Rg
minus minus minus minus
minusminus
minus minus
minusminusminus
minus
minus
minus
minusminus
+Vs (xr(t))
minus
minusminusminusminus
+Bp1
+Bp1
minusBp1
minusBp1
Figure 3 Full synchronization system
with the receiver which is a similar circuit Moreover thecontrol law given by (3) and (4) can be rewritten as
119906 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905)) int119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(11)
Figure 2 shows the design of (11) by using Op Amps andanalog multipliers According to the AD633JN data sheet[23] the output voltage on the node A of Figure 2 is givenby
VA (119905) =110(1198811 minus1198812) (1198813 minus1198814)
=
110(119911
119905(119905) minus 119911
119903(119905))
2
(12)
The behavior of a continuous integrator (omitting 119877119887) is
obtained on the node B and from (12) takes the form
VB (119905) =119877
119889
10119877119886119877
119888119862
119886
int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591 (13)
Note that 119877119887is a resistor with high value and in practice it
is used to prevent the integration from a zero voltage dropOtherwise the voltage on the node C is given as
VC (119905) =119877
119891
119877
119890
(119911
119905(119905) minus 119911
119903(119905)) (14)
Advances in Mathematical Physics 5
97531
minus1minus3minus5minus7minus9
0002 0006 0010 0014 0018
Time (s)
xt(t)x
r(t)
(V)
Figure 4 Time-domain chaotic waveforms for the transmitter (redline) and receiver (blue line) circuitswith the synchronization circuitdeactivated
Combining (13) and (14) along with the secondmultiplier weobtain
119906 (119905) =
119877
119889119877
119891
100119877119886119877
119888119877
119890119862
119886
(119911
119905(119905) minus 119911
119903(119905))
sdot int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(15)
The transmitter and receiver circuits shown in Figure 1 areconnected by using Figure 2 and hence the full synchroniza-tion system is got as shown in Figure 3 According to (2)(10) (15) and Figure 3 the behavioral model for the receivercircuit including the adaptive control is given by
119903(119905) =
119910
119903(119905)
119877
1199092119862119909
119910
119903(119905) =
119911
119903(119905)
119877
1199102119862119910
119903(119905)
= minus
119909
119903(119905)
119877
119909119862
119911
minus
119910
119903(119905)
119877
119910119862
119911
minus
119911
119903(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119903 (119905))
1198771+
1198812 (119909119903 (119905))
1198772+
1198813 (119909119903 (119905))
1198773)
+119896 (119905) (119911
119905(119905) minus 119911
119903(119905))
119896 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905))2
1198811 (119909119903 (119905)) = 1199011 minus1198811 (119909119903 (119905))GB
119860DC
1198812 (119909119903 (119905)) = 1199012 minus1198812 (119909119903 (119905))GB
119860DC
1198813 (119909119903 (119905)) = 1199013 minus1198813 (119909119903 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119903 (119905)
GB (Bp1 minus 119909119903 (119905)) minus
SRGB
le Bp1 minus 119909119903 (119905) leSRGB
minusSR Bp1 minus 119909119903 (119905) lt minusSRGB
1199012 =
SR minus119909
119903(119905) gt
SRGB
GB (minus119909119903(119905)) minus
SRGB
le minus119909
119903(119905) le
SRGB
minusSR minus119909
119903(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119903 (119905) gtSRGB
GB (minusBp1 minus 119909119903 (119905)) minus
SRGB
le minusBp1 minus 119909119903 (119905) leSRGB
minusSR minusBp1 minus 119909119903 (119905) lt minusSRGB
(16)
where 1198961= 119877
119889119877
119891100119877
119886119877
119888119877
119890119877
119892119862
119886119862
119911 Now that we have
the behavioral models for the transmitter and receiver alongwith the synchronization scheme given by (10) and (16)respectively we can use them to do numerical simulationsby using the fourth-order Runge-Kutta algorithm with timestep 2119890minus6 It is worth mentioning that unlike the synchro-nization methods previously reported PWL functions areused to design the nonlinear part of the chaotic oscillatorand as a consequence a level of inaccuracy is introducedinto a numerical analysis which is more evident whennumerical and experimental results are compared [17 21 22]Meanwhile the behavioral models previously deduced takeinto account the real physical active device parameters andhence the synchronization of chaotic waveforms between thetransmitter and receiver is better forecasted It is importantto stress that finite performance parameters of Op Amps arethe main limitation of that in practice the real behaviorof the SNFS (see Figure 7(b)) and the generation of chaoticattractors are both degraded when the operating frequencyof the chaotic system increases As one consequence theperformance of the synchronization scheme is also worsenedTherefore to gain insight and improve the synchronizationschemes used in communication systems based on chaosperformance parameters of the active devices must be takeninto account during the numerical simulations
4 Experimental Results
The chaotic oscillators were designed to oscillate in a centerfrequency of 345 kHz Table 1 gives the numerical values ofFigure 3 meanwhile Table 2 shows the performance param-eters of the UA741 Op Amp In a first step and with thesynchronization circuit deactivated chaotic waveforms for119909
119905(119905) and 119909
119903(119905) variables are generated and shown in Figure 4
For these graphics the following initial conditions were used119909
119905(0) = 01 119910
119905(0) = 01 119911
119905(0) = 001 and 119909
119903(0) =
0 119910119903(0) = 01 119911
119903(0) = 001 Note that the dynamical
systems are extremely sensitive with respect to differencesin initial conditions and although here it is not shown thechaotic waveforms for 119910
119905(119905) 119910119903(119905) 119911119905(119905) and 119911
119903(119905) variables
are also different In a second step the synchronization circuitwas activated and the results are depicted in Figure 5 Fromthis figure one can observe that the synchronization occurs
6 Advances in Mathematical Physics
0002 0006 0010 0014 0018
Time (s)
97531
minus1minus3minus5minus7minus9
xt(t)x
r(t)
(V)
(a)
0002 0006 0010 0014 0018
Time (s)
yt(t)y
r(t)
(V)
3
2
1
0
minus1
minus2
minus3
(b)
0002 0006 0010 0014 0018
Time (s)
3
2
1
0
minus1
minus2
minus3
z t(t)z r(t)
(V)
(c)
Figure 5 Time-domain chaotic waveforms for the transmitter (red line) and receiver (blue line) circuits with the synchronization circuitactivated (a) signals 119909
119905(119905) and 119909
119903(119905) (b) signals 119910
119905(119905) and 119910
119903(119905) and (c) signals 119911
119905(119905) and 119911
119903(119905)
Table 1 Component list from Figure 3
Element Value ToleranceTransmitter and receiver circuits
Op Amp UA741119877 10 kΩ plusmn5119877
119904500Ω potentiometer
119877
12340 kΩ plusmn5
119877
11990911991011991110 kΩ plusmn5
119877
119909211991027 kΩ plusmn5
119862
119909119910119911584 nF (345 kHz) plusmn20
plusmnBp1 plusmn45 VSynchronization circuit
Op Amp UA741Analog multiplier AD633JN119862
11988610 nF plusmn20
119877
11988615 kΩ potentiometer plusmn5
119877
11988747 kΩ plusmn5
119877
1198881 kΩ plusmn5
119877
11988910 kΩ plusmn5
119877
1198901 kΩ plusmn5
119877
11989110 kΩ plusmn5
119877
11989210 kΩ plusmn5
after 25ms Figure 6 shows the evolutions of state adaptivesynchronization errors between the transmitter and receiveroscillators respectively
To validate the results previously derived and demon-strate the real behavior of the synchronization schemethe proposed circuit illustrated in Figure 3 was built andexperimentally tested The numerical values of the discrete
Table 2 Performance parameters of the UA741 Op Amp
Parameter Value119860DC 10682 dBSR 22VusGB 272MHz119881ps 9 V119881ns minus9V119881dd plusmn11 V
0002 0006 0010 0014 0018
Time (s)
06
04
02
00
minus02minus04minus06e x
(t)e y(t)e z(t)
(V)
Figure 6The time responses for the state adaptive synchronizationerrors 119890
119909(119905) (red line) 119890
119910(119905) (blue line) and 119890
119911(119905) (black line)
components used during the numerical simulations were alsoused in the experimental tests but with a slight modificationof 119877119886in order that the discrete integrator is operating to
345 kHz Figure 7(a) shows the experimental results corre-sponding to the generation of 4-scrolls in the 119909
119905(119905)-versus-
119910
119905(119905) plane and Figure 7(b) shows the real behavior of the
SNFS A similar behavior is obtained for the SNFS and scrollson the receiver circuit Moreover whereas Figure 8(a) showstime-domain chaotic waveforms for 119911
119905(119905) and 119911
119903(119905) when
the synchronization circuit is deactivated Figure 8(b) shows
Advances in Mathematical Physics 7
Tek Stop DisplayType
Vectors
Format
XYContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode2V 1V
(a)
Tek Stop DisplayType
Vectors
Format
YT
ContrastIncrease
ContrastDecrease
CH1 XY ModeCH2 100mV2V
(b)
Figure 7 (a) Experimental verification of 4-scrolls in the transmitter circuit and (b) real behavior of the SNFS based on Op Amps
Tek
CH2 500mV
Trigrsquod M Pos 0 s Measure
CH1None
CH1None
CH1None
CH1None
CH1None
CH1 500mV M 500120583s CH10V
12
(a)
CH2CH1
Tek Trigrsquod M Pos 0 s MeasureCH1None
CH1None
CH1None
CH1None
CH1None
M 500120583s CH10V1
1
2
V 1V
(b)
Figure 8 Time-domain chaotic waveforms of the transmitter and receiver circuits and with the synchronization circuit (a) deactivated and(b) activated
Tek DisplayType
Vectors
FormatXY
ContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode
Trigrsquod
1V 1V
Figure 9 Synchronization phase diagram of the signals 119911119905(119905)-
versus-119911119903(119905)
the chaotic waveforms when the synchronization circuit isactivated Finally Figure 9 shows the synchronized signals in
the 119911119905(119905)-versus-119911
119903(119905) plane and a similar behavior also occurs
for the other state variables
5 Conclusions
Unlike the synchronization techniques reported in the liter-ature where a PWL function is used to model the nonlinearpart of a dynamical system herein the behavioral model ofthe dynamical system deduced in [17] was used as transmitterand receiver circuit in order to a posteriori be used into acommunication system based on chaos The most influen-tial performance parameters associated to Op Amps wereincluded to model principally the real behavior of the SNFSIn this context it is clear that the use of PWL models intro-duces a high level of inaccuracy as was already demonstratedin [17 21 22] and hence the use of PWL models are onlyfeasible at low frequency Furthermore an adaptive controllaw was proposed and synthesized with Op Amps and analogmultipliers showing that the synchronization between twononlinear dynamical systems is more accurate and realistic
8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Advances in Mathematical Physics 5
97531
minus1minus3minus5minus7minus9
0002 0006 0010 0014 0018
Time (s)
xt(t)x
r(t)
(V)
Figure 4 Time-domain chaotic waveforms for the transmitter (redline) and receiver (blue line) circuitswith the synchronization circuitdeactivated
Combining (13) and (14) along with the secondmultiplier weobtain
119906 (119905) =
119877
119889119877
119891
100119877119886119877
119888119877
119890119862
119886
(119911
119905(119905) minus 119911
119903(119905))
sdot int
119905
0(119911
119905(120591) minus 119911
119903(120591))
2119889120591
(15)
The transmitter and receiver circuits shown in Figure 1 areconnected by using Figure 2 and hence the full synchroniza-tion system is got as shown in Figure 3 According to (2)(10) (15) and Figure 3 the behavioral model for the receivercircuit including the adaptive control is given by
119903(119905) =
119910
119903(119905)
119877
1199092119862119909
119910
119903(119905) =
119911
119903(119905)
119877
1199102119862119910
119903(119905)
= minus
119909
119903(119905)
119877
119909119862
119911
minus
119910
119903(119905)
119877
119910119862
119911
minus
119911
119903(119905)
119877
119911119862
119911
+
1119862
119911
(
1198811 (119909119903 (119905))
1198771+
1198812 (119909119903 (119905))
1198772+
1198813 (119909119903 (119905))
1198773)
+119896 (119905) (119911
119905(119905) minus 119911
119903(119905))
119896 (119905) = 1198961 (119911119905 (119905) minus 119911119903 (119905))2
1198811 (119909119903 (119905)) = 1199011 minus1198811 (119909119903 (119905))GB
119860DC
1198812 (119909119903 (119905)) = 1199012 minus1198812 (119909119903 (119905))GB
119860DC
1198813 (119909119903 (119905)) = 1199013 minus1198813 (119909119903 (119905))GB
119860DC
1199011 =
SR SRGB
lt Bp1 minus 119909119903 (119905)
GB (Bp1 minus 119909119903 (119905)) minus
SRGB
le Bp1 minus 119909119903 (119905) leSRGB
minusSR Bp1 minus 119909119903 (119905) lt minusSRGB
1199012 =
SR minus119909
119903(119905) gt
SRGB
GB (minus119909119903(119905)) minus
SRGB
le minus119909
119903(119905) le
SRGB
minusSR minus119909
119903(119905) lt minus
SRGB
1199013
=
SR minusBp1 minus 119909119903 (119905) gtSRGB
GB (minusBp1 minus 119909119903 (119905)) minus
SRGB
le minusBp1 minus 119909119903 (119905) leSRGB
minusSR minusBp1 minus 119909119903 (119905) lt minusSRGB
(16)
where 1198961= 119877
119889119877
119891100119877
119886119877
119888119877
119890119877
119892119862
119886119862
119911 Now that we have
the behavioral models for the transmitter and receiver alongwith the synchronization scheme given by (10) and (16)respectively we can use them to do numerical simulationsby using the fourth-order Runge-Kutta algorithm with timestep 2119890minus6 It is worth mentioning that unlike the synchro-nization methods previously reported PWL functions areused to design the nonlinear part of the chaotic oscillatorand as a consequence a level of inaccuracy is introducedinto a numerical analysis which is more evident whennumerical and experimental results are compared [17 21 22]Meanwhile the behavioral models previously deduced takeinto account the real physical active device parameters andhence the synchronization of chaotic waveforms between thetransmitter and receiver is better forecasted It is importantto stress that finite performance parameters of Op Amps arethe main limitation of that in practice the real behaviorof the SNFS (see Figure 7(b)) and the generation of chaoticattractors are both degraded when the operating frequencyof the chaotic system increases As one consequence theperformance of the synchronization scheme is also worsenedTherefore to gain insight and improve the synchronizationschemes used in communication systems based on chaosperformance parameters of the active devices must be takeninto account during the numerical simulations
4 Experimental Results
The chaotic oscillators were designed to oscillate in a centerfrequency of 345 kHz Table 1 gives the numerical values ofFigure 3 meanwhile Table 2 shows the performance param-eters of the UA741 Op Amp In a first step and with thesynchronization circuit deactivated chaotic waveforms for119909
119905(119905) and 119909
119903(119905) variables are generated and shown in Figure 4
For these graphics the following initial conditions were used119909
119905(0) = 01 119910
119905(0) = 01 119911
119905(0) = 001 and 119909
119903(0) =
0 119910119903(0) = 01 119911
119903(0) = 001 Note that the dynamical
systems are extremely sensitive with respect to differencesin initial conditions and although here it is not shown thechaotic waveforms for 119910
119905(119905) 119910119903(119905) 119911119905(119905) and 119911
119903(119905) variables
are also different In a second step the synchronization circuitwas activated and the results are depicted in Figure 5 Fromthis figure one can observe that the synchronization occurs
6 Advances in Mathematical Physics
0002 0006 0010 0014 0018
Time (s)
97531
minus1minus3minus5minus7minus9
xt(t)x
r(t)
(V)
(a)
0002 0006 0010 0014 0018
Time (s)
yt(t)y
r(t)
(V)
3
2
1
0
minus1
minus2
minus3
(b)
0002 0006 0010 0014 0018
Time (s)
3
2
1
0
minus1
minus2
minus3
z t(t)z r(t)
(V)
(c)
Figure 5 Time-domain chaotic waveforms for the transmitter (red line) and receiver (blue line) circuits with the synchronization circuitactivated (a) signals 119909
119905(119905) and 119909
119903(119905) (b) signals 119910
119905(119905) and 119910
119903(119905) and (c) signals 119911
119905(119905) and 119911
119903(119905)
Table 1 Component list from Figure 3
Element Value ToleranceTransmitter and receiver circuits
Op Amp UA741119877 10 kΩ plusmn5119877
119904500Ω potentiometer
119877
12340 kΩ plusmn5
119877
11990911991011991110 kΩ plusmn5
119877
119909211991027 kΩ plusmn5
119862
119909119910119911584 nF (345 kHz) plusmn20
plusmnBp1 plusmn45 VSynchronization circuit
Op Amp UA741Analog multiplier AD633JN119862
11988610 nF plusmn20
119877
11988615 kΩ potentiometer plusmn5
119877
11988747 kΩ plusmn5
119877
1198881 kΩ plusmn5
119877
11988910 kΩ plusmn5
119877
1198901 kΩ plusmn5
119877
11989110 kΩ plusmn5
119877
11989210 kΩ plusmn5
after 25ms Figure 6 shows the evolutions of state adaptivesynchronization errors between the transmitter and receiveroscillators respectively
To validate the results previously derived and demon-strate the real behavior of the synchronization schemethe proposed circuit illustrated in Figure 3 was built andexperimentally tested The numerical values of the discrete
Table 2 Performance parameters of the UA741 Op Amp
Parameter Value119860DC 10682 dBSR 22VusGB 272MHz119881ps 9 V119881ns minus9V119881dd plusmn11 V
0002 0006 0010 0014 0018
Time (s)
06
04
02
00
minus02minus04minus06e x
(t)e y(t)e z(t)
(V)
Figure 6The time responses for the state adaptive synchronizationerrors 119890
119909(119905) (red line) 119890
119910(119905) (blue line) and 119890
119911(119905) (black line)
components used during the numerical simulations were alsoused in the experimental tests but with a slight modificationof 119877119886in order that the discrete integrator is operating to
345 kHz Figure 7(a) shows the experimental results corre-sponding to the generation of 4-scrolls in the 119909
119905(119905)-versus-
119910
119905(119905) plane and Figure 7(b) shows the real behavior of the
SNFS A similar behavior is obtained for the SNFS and scrollson the receiver circuit Moreover whereas Figure 8(a) showstime-domain chaotic waveforms for 119911
119905(119905) and 119911
119903(119905) when
the synchronization circuit is deactivated Figure 8(b) shows
Advances in Mathematical Physics 7
Tek Stop DisplayType
Vectors
Format
XYContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode2V 1V
(a)
Tek Stop DisplayType
Vectors
Format
YT
ContrastIncrease
ContrastDecrease
CH1 XY ModeCH2 100mV2V
(b)
Figure 7 (a) Experimental verification of 4-scrolls in the transmitter circuit and (b) real behavior of the SNFS based on Op Amps
Tek
CH2 500mV
Trigrsquod M Pos 0 s Measure
CH1None
CH1None
CH1None
CH1None
CH1None
CH1 500mV M 500120583s CH10V
12
(a)
CH2CH1
Tek Trigrsquod M Pos 0 s MeasureCH1None
CH1None
CH1None
CH1None
CH1None
M 500120583s CH10V1
1
2
V 1V
(b)
Figure 8 Time-domain chaotic waveforms of the transmitter and receiver circuits and with the synchronization circuit (a) deactivated and(b) activated
Tek DisplayType
Vectors
FormatXY
ContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode
Trigrsquod
1V 1V
Figure 9 Synchronization phase diagram of the signals 119911119905(119905)-
versus-119911119903(119905)
the chaotic waveforms when the synchronization circuit isactivated Finally Figure 9 shows the synchronized signals in
the 119911119905(119905)-versus-119911
119903(119905) plane and a similar behavior also occurs
for the other state variables
5 Conclusions
Unlike the synchronization techniques reported in the liter-ature where a PWL function is used to model the nonlinearpart of a dynamical system herein the behavioral model ofthe dynamical system deduced in [17] was used as transmitterand receiver circuit in order to a posteriori be used into acommunication system based on chaos The most influen-tial performance parameters associated to Op Amps wereincluded to model principally the real behavior of the SNFSIn this context it is clear that the use of PWL models intro-duces a high level of inaccuracy as was already demonstratedin [17 21 22] and hence the use of PWL models are onlyfeasible at low frequency Furthermore an adaptive controllaw was proposed and synthesized with Op Amps and analogmultipliers showing that the synchronization between twononlinear dynamical systems is more accurate and realistic
8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Advances in Mathematical Physics
0002 0006 0010 0014 0018
Time (s)
97531
minus1minus3minus5minus7minus9
xt(t)x
r(t)
(V)
(a)
0002 0006 0010 0014 0018
Time (s)
yt(t)y
r(t)
(V)
3
2
1
0
minus1
minus2
minus3
(b)
0002 0006 0010 0014 0018
Time (s)
3
2
1
0
minus1
minus2
minus3
z t(t)z r(t)
(V)
(c)
Figure 5 Time-domain chaotic waveforms for the transmitter (red line) and receiver (blue line) circuits with the synchronization circuitactivated (a) signals 119909
119905(119905) and 119909
119903(119905) (b) signals 119910
119905(119905) and 119910
119903(119905) and (c) signals 119911
119905(119905) and 119911
119903(119905)
Table 1 Component list from Figure 3
Element Value ToleranceTransmitter and receiver circuits
Op Amp UA741119877 10 kΩ plusmn5119877
119904500Ω potentiometer
119877
12340 kΩ plusmn5
119877
11990911991011991110 kΩ plusmn5
119877
119909211991027 kΩ plusmn5
119862
119909119910119911584 nF (345 kHz) plusmn20
plusmnBp1 plusmn45 VSynchronization circuit
Op Amp UA741Analog multiplier AD633JN119862
11988610 nF plusmn20
119877
11988615 kΩ potentiometer plusmn5
119877
11988747 kΩ plusmn5
119877
1198881 kΩ plusmn5
119877
11988910 kΩ plusmn5
119877
1198901 kΩ plusmn5
119877
11989110 kΩ plusmn5
119877
11989210 kΩ plusmn5
after 25ms Figure 6 shows the evolutions of state adaptivesynchronization errors between the transmitter and receiveroscillators respectively
To validate the results previously derived and demon-strate the real behavior of the synchronization schemethe proposed circuit illustrated in Figure 3 was built andexperimentally tested The numerical values of the discrete
Table 2 Performance parameters of the UA741 Op Amp
Parameter Value119860DC 10682 dBSR 22VusGB 272MHz119881ps 9 V119881ns minus9V119881dd plusmn11 V
0002 0006 0010 0014 0018
Time (s)
06
04
02
00
minus02minus04minus06e x
(t)e y(t)e z(t)
(V)
Figure 6The time responses for the state adaptive synchronizationerrors 119890
119909(119905) (red line) 119890
119910(119905) (blue line) and 119890
119911(119905) (black line)
components used during the numerical simulations were alsoused in the experimental tests but with a slight modificationof 119877119886in order that the discrete integrator is operating to
345 kHz Figure 7(a) shows the experimental results corre-sponding to the generation of 4-scrolls in the 119909
119905(119905)-versus-
119910
119905(119905) plane and Figure 7(b) shows the real behavior of the
SNFS A similar behavior is obtained for the SNFS and scrollson the receiver circuit Moreover whereas Figure 8(a) showstime-domain chaotic waveforms for 119911
119905(119905) and 119911
119903(119905) when
the synchronization circuit is deactivated Figure 8(b) shows
Advances in Mathematical Physics 7
Tek Stop DisplayType
Vectors
Format
XYContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode2V 1V
(a)
Tek Stop DisplayType
Vectors
Format
YT
ContrastIncrease
ContrastDecrease
CH1 XY ModeCH2 100mV2V
(b)
Figure 7 (a) Experimental verification of 4-scrolls in the transmitter circuit and (b) real behavior of the SNFS based on Op Amps
Tek
CH2 500mV
Trigrsquod M Pos 0 s Measure
CH1None
CH1None
CH1None
CH1None
CH1None
CH1 500mV M 500120583s CH10V
12
(a)
CH2CH1
Tek Trigrsquod M Pos 0 s MeasureCH1None
CH1None
CH1None
CH1None
CH1None
M 500120583s CH10V1
1
2
V 1V
(b)
Figure 8 Time-domain chaotic waveforms of the transmitter and receiver circuits and with the synchronization circuit (a) deactivated and(b) activated
Tek DisplayType
Vectors
FormatXY
ContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode
Trigrsquod
1V 1V
Figure 9 Synchronization phase diagram of the signals 119911119905(119905)-
versus-119911119903(119905)
the chaotic waveforms when the synchronization circuit isactivated Finally Figure 9 shows the synchronized signals in
the 119911119905(119905)-versus-119911
119903(119905) plane and a similar behavior also occurs
for the other state variables
5 Conclusions
Unlike the synchronization techniques reported in the liter-ature where a PWL function is used to model the nonlinearpart of a dynamical system herein the behavioral model ofthe dynamical system deduced in [17] was used as transmitterand receiver circuit in order to a posteriori be used into acommunication system based on chaos The most influen-tial performance parameters associated to Op Amps wereincluded to model principally the real behavior of the SNFSIn this context it is clear that the use of PWL models intro-duces a high level of inaccuracy as was already demonstratedin [17 21 22] and hence the use of PWL models are onlyfeasible at low frequency Furthermore an adaptive controllaw was proposed and synthesized with Op Amps and analogmultipliers showing that the synchronization between twononlinear dynamical systems is more accurate and realistic
8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Advances in Mathematical Physics 7
Tek Stop DisplayType
Vectors
Format
XYContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode2V 1V
(a)
Tek Stop DisplayType
Vectors
Format
YT
ContrastIncrease
ContrastDecrease
CH1 XY ModeCH2 100mV2V
(b)
Figure 7 (a) Experimental verification of 4-scrolls in the transmitter circuit and (b) real behavior of the SNFS based on Op Amps
Tek
CH2 500mV
Trigrsquod M Pos 0 s Measure
CH1None
CH1None
CH1None
CH1None
CH1None
CH1 500mV M 500120583s CH10V
12
(a)
CH2CH1
Tek Trigrsquod M Pos 0 s MeasureCH1None
CH1None
CH1None
CH1None
CH1None
M 500120583s CH10V1
1
2
V 1V
(b)
Figure 8 Time-domain chaotic waveforms of the transmitter and receiver circuits and with the synchronization circuit (a) deactivated and(b) activated
Tek DisplayType
Vectors
FormatXY
ContrastIncrease
ContrastDecrease
CH1 CH2 XY Mode
Trigrsquod
1V 1V
Figure 9 Synchronization phase diagram of the signals 119911119905(119905)-
versus-119911119903(119905)
the chaotic waveforms when the synchronization circuit isactivated Finally Figure 9 shows the synchronized signals in
the 119911119905(119905)-versus-119911
119903(119905) plane and a similar behavior also occurs
for the other state variables
5 Conclusions
Unlike the synchronization techniques reported in the liter-ature where a PWL function is used to model the nonlinearpart of a dynamical system herein the behavioral model ofthe dynamical system deduced in [17] was used as transmitterand receiver circuit in order to a posteriori be used into acommunication system based on chaos The most influen-tial performance parameters associated to Op Amps wereincluded to model principally the real behavior of the SNFSIn this context it is clear that the use of PWL models intro-duces a high level of inaccuracy as was already demonstratedin [17 21 22] and hence the use of PWL models are onlyfeasible at low frequency Furthermore an adaptive controllaw was proposed and synthesized with Op Amps and analogmultipliers showing that the synchronization between twononlinear dynamical systems is more accurate and realistic
8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Advances in Mathematical Physics
thanPWLmodels Lyapunov directmethodwas used to studythe asymptotic stability of the full synchronization systemIt is important to stress that the full synchronization systemis of low cost approximately $7400 USD Experimental datausing commercial available OpAmps for synchronizing four-scrolls at 345 kHz were gathered showing good agreementwith numerical approximations
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported in part by the National Council forScience and Technology (CONACyT) Mexico under Grant222843 and in part by the Universidad Autonoma de Tlaxcala(UATx) Tlaxcala de Xicohtencatl TL Mexico under GrantsUAT-121AD-R and CACyPI-UATx-2014
References
[1] G Chen and X Dong From Chaos to Order-PerspectivesMethodologies and Applications World Scientific Singapore1998
[2] G Chen Controlling Chaos and Bifurcations in EngineeringSystems CRC Press Boca Raton Fla USA 1999
[3] G Chen and T Ueta Chaos in Circuits and Systems WorldScientific Singapore 2002
[4] M E Yalcin J A K Suykens and J P L Vandewalle Cellu-lar Neural Networks Multi-Scroll Chaos and SynchronizationWorld Scientific Singapore 2005
[5] P StavroulakisChaos Applications in Telecommunications CRCTaylor amp Francis Group Press Boca Raton Fla USA 2006
[6] L M Pecora and T L Carrol ldquoCircuit implementation of syn-chronized chaos with application to communicationsrdquo PhysicalReview Letters vol 71 no 1 1993
[7] S Lankalapalli and A Ghosal ldquoChaos in robot control equa-tionsrdquo International Journal of Bifurcation and Chaos in AppliedSciences and Engineering vol 7 no 3 pp 707ndash720 1997
[8] H Sira-Ramırez and C Cruz-Hernandez ldquoSynchronization ofchaotic systems a generalized Hamiltonian systems approachrdquoInternational Journal of Bifurcation and Chaos in Applied Sci-ences and Engineering vol 11 no 5 pp 1381ndash1395 2001
[9] S Boccaletti J Kurths G Osipov D L Valladares and CS Zhou ldquoThe synchronization of chaotic systemsrdquo PhysicsReports vol 366 no 1-2 pp 1ndash101 2002
[10] M T Yassen ldquoAdaptive control and synchronization of amodified chuarsquos circuit systemrdquo Applied Mathematics and Com-putation vol 135 no 1 pp 113ndash128 2003
[11] C Cruz-Hernandez ldquoSynchronization of time-delay Chuarsquososcillatorwith application to secure communicationrdquoNonlinearDynamics and Systems Theory vol 4 no 1 pp 1ndash13 2004
[12] L Gamez-Guzman C Cruz-Hernandez R M Lopez-Gutierrez and E E Garcıa-Guerrero ldquoSynchronization ofChuarsquos circuits with multi-scroll attractors application tocommunicationrdquo Communications in Nonlinear Science andNumerical Simulation vol 14 no 6 pp 2765ndash2775 2009
[13] L Jia and H Tang ldquoAdaptive control and synchronization of afour-dimensional energy resources system of JiangSu provincerdquoInternational Journal of Nonlinear Science vol 7 no 3 pp 307ndash311 2009
[14] S Vaidyanathan ldquoAdaptive control and synchronization of theuncertain Sprott J systemrdquo International Journal of Mathematicsand Scientific Computing vol 1 no 1 pp 14ndash18 2011
[15] J M Munoz-Pacheco E Zambrano-Serrano O Felix-BeltranL C Gomez-Pavon and A Luis-Ramos ldquoSynchronization ofPWL function-based 2D and 3D Multi-scroll chaotic systemsrdquoNonlinear Dynamics vol 70 no 2 pp 1633ndash1643 2012
[16] C K Volos I M Kyprianidis and I N Stouboulos ldquoMotioncontrol of robots using a chaotic truly random bits generatorrdquoJournal of Engineering Science and Technology Review vol 5 no2 pp 6ndash11 2012
[17] E Ortega-Torres C Sanchez-Lopez and J Mendoza-LopezldquoFrequency behavior of saturated nonlinear function seriesbased on opampsrdquo Revista Mexicana de Fısica vol 59 no 6 pp504ndash510 2013
[18] N Smaoui A Karouma and M Zribi ldquoAdaptive synchro-nization of hyperchaotic Chen systems with application tosecure communicationrdquo International Journal of InnovativeComputing Information and Control vol 9 no 3 pp 1127ndash11442013
[19] A Ray A RoyChowdhury and S Basak ldquoEffect of noiseon generalized synchronization an experimental perspectiverdquoJournal of Computational and Nonlinear Dynamics vol 8 no 3Article ID 031003 7 pages 2013
[20] A Ray and A Roychowdhury ldquoOuter synchronization ofnetworks with different node dynamicsrdquoThe European PhysicalJournal Special Topics vol 223 no 8 pp 1509ndash1518 2014
[21] C Sanchez-Lopez J Mendoza-Lopez C Muniz-Montero LA Sanchez-Gaspariano and J M Munoz-Pacheco ldquoAccuracyvs simulation speed trade-off enhancements in the generationof chaotic attractorsrdquo in Proceedings of the IEEE 4th LatinAmerican Symposium on Circuits and Systems (LASCAS rsquo13) pp1ndash4 Cusco Peru February-March 2013
[22] E Ortega-Torres S Ruız-Hernandez and C Sanchez-LopezldquoBehavioral modeling for synthesizing n-scroll attractorsrdquoIEICE Electronics Express vol 11 no 13 Article ID 201404672014
[23] Data Sheet AD633JN httpwwwanalogcom
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of