-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
1/40
1. INTRODUCTION
One of the most promising renewable energy sources
characterized by a huge potential of conversion into
electrical power is the solar energy. The conversion of solar
radiation into electrical energy by Photo-Voltaic
(PV) effect is a very promising technology being clean silent
and reliable with very small maintenance
costs and small ecological impact. The interest in the Photo
Voltaic conversion systems is visibly reflected
by the e!ponential increase of sales in this mar"et
segment with a strong growth pro#ection for the ne!t
decades. $ccording to recent mar"et research reports carried out
by %uropean Photovoltaic &ndustry
$ssociation (%P&$) the total installed power of PV
conversion e'uipment increased from about * in
+,,up to nearly + * in +,,.
The continuous evolution of the technology determined a
sustained increase of the conversion efficiency of
PV panels but nonetheless the most part of the commercial panels
have efficiencies no more than +,/. $
constant research preoccupation of the technical community
involved in the solar energy harnessing
technology refers to various solutions to increase the PV
panel0s conversion efficiency. $mong PV efficiency
improving solutions we can mention1 solar trac"ing optimization
of solar cells geometry enhancement of
light trapping capability use of new materials etc. The output
power produced by the PV panels depends
strongly on the incident light radiation.
The continuous modification of the sun-earth relative
position determines a continuously changing of
incident radiation on a fi!ed PV panel. The point of ma!imum
received energy is reached when the direction
of solar radiation is perpendicular on the panel surface. Thus
an increase of the output energy of a given PV
panel can be obtained by mounting the panel on a solar
trac"ing device that follows the sun tra#ectory.
2nli"e the classical fi!ed PV panels the mobile ones driven by
solar trac"ers are "ept under optimum
insolation for all positions of the 3un boosting thus the PV
conversion efficiency of the system. The output
energy of PV panels e'uipped with solar trac"ers may increase
with tens of percents especially during the
summer when the energy harnessed from the sun is more
important. Photo-Voltaic or PV cells "nown
commonly as solar cells convert the energy from sunlight into 45
electricity. PVs offer added advantagesover other renewable energy
sources in that they give off no noise and re'uire practically no
maintenance. $
trac"ing system must be able to follow the sun with a certain
degree of accuracy return the collector to its
original position at the end of the day and also trac" during
periods of cloud over.
The ma#or components of this system are as follows.
• 6ight dependent resistor
• 7icrocontroller.
•Output mechanical transducer (stepper motor)
1info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
2/40
1.1 Background
$ 3olar Trac"er is a device onto which solar panels are fitted
which trac"s the motion of the sun across the
s"y ensuring that the ma!imum amount of sunlight stri"es the
panels throughout the day. The 3olar Trac"er
will attempt to navigate to the best angle of e!posure of light
from the sun. This report aims to let the reader
understand the pro#ect wor" which & have done. $ brief
introduction to 3olar Panel and 3olar Trac"er is
e!plained in the 6iterature 8esearch section. 9asically the
3olar Trac"er is divided into two main categories
hardware and software. &t is further subdivided into si!
main functionalities1 7ethod of Trac"er 7ount
4rives 3ensors 8T5 7otors and Power 3upply of the 3olar Trac"er
is also e!plained and e!plored. The
reader would then be brief with some analysis and perceptions of
the information.
9y using solar arrays a series of solar cells electrically
connected a 45 voltage is generated which can be
physically used on a load. 3olar arrays or panels are
being used increasingly as efficiencies reach higher
levels and are especially popular in remote areas where
placement of electricity lines is not economically
viable. This alternative power source is continuously achieving
greater popularity especially since the
realisation of fossil fuels shortcomings. 8enewable energy in
the form of electricity has been in use to some
degree as long as :; or ,, years ago. 3ources such as 3olar *ind
in the morning and the
evening. $t such an angle the light gathering ability of the
cell is essentially zero resulting in no output. $s
the day progresses to midday the angle of incidence approaches
,> causing a steady increase in power until
at the point where the light incident on the panel is completely
perpendicular and ma!imum power is
achieved. $s the day continues toward dus" the reverse happens
and the increasing angle causes the power
to decrease again toward minimum again. ?rom this bac"ground we
see the need to maintain the ma!imum
power output from the panel by maintaining an angle of
incidence as close to ,> as possible. 9y tilting the
solar panel to continuously face the sun this can be achieved.
This process of sensing and following the
position of the sun is "nown as 3olar Trac"ing. &t was
resolved that real-time trac"ing would be necessary to
follow the sun effectively so that no e!ternal data would be
re'uired in operation.
2info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
3/40
2. Literature Research
This chapter aims to provide a brief "nowledge of 3olar Panel
3olar Trac"er and the components which
made up 3olar Trac"er.
2.1 Technology of olar !anel
3olar panels are devices that convert light into electricity.
They are called solar after the sun because the sun
is the most powerful source of the light available for use. They
are sometimes called photovoltaic which
means @light-electricity@. 3olar cells or PV cells rely on the
photovoltaic effect to absorb the energy of the
sun and cause current to flow between two oppositely charge
layers. $ solar panel is a collection of solar
cells. $lthough each solar cell provides a relatively small
amount of power many solar cells spread over a
large area can provide enough power to be useful. To get the
most power solar panels have to be pointed
directly at the 3un. The development of solar cell
technology begins with A research of ?rench physicist
$ntoine-5esar 9ec'uerel.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
4/40
the Borthern
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
5/40
$. !ro%ect Descri&tion
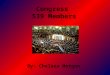
$.1 Block Diagra'
Fig 3.1 Block Diagram of Project
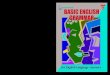
$.2 che'atic Diagra'
?ig .+ 3chematic 4iagram of Pro#ect
5info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
6/40
$.$ !RINT"D CIRCUIT BO(RD
$lmost all circuits encountered on electronic e'uipment
(computers TV radio industrial control e'uipment
etc.) are mounted on printed circuit boards. 5lose inspection of
a P59 reveals that it contains a series of
copper trac"s printed on one or both sides of a fiber glass
board. The copper trac"s form the wiring pattern
re'uired to lin" the circuit devices according to a given
circuit diagram.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
7/40
?ig .D 3ingle sided P59
Dou,le+sided !CB
4ouble-sided P59s have copper trac"s on both sides of the board.
The trac" layout is designed so as not to
allow shorts from one side to another if it is re'uired to lin"
points between the two sides electrical
connections are made by small interconnecting holes which are
plated with copper during manufacture.
?ig .; 4ouble sided P59
-ulti+layer !CB
&n multi-layer P59s each side contains several layers of
trac" patterns which are insulated from one another.
These layers are laminated under heat and high pressure. $
multi-layer P59 is shown in ?igure .E
?ig .E 7ulti layered P59
info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
8/40
2) -(IN/ ( !CB
P59Cs commonly available on the mar"et are not particular
circuits but are available as copper clad boards.
&n other words the whole area of one or both sides of the
board is coated with copper. The user then draws
his trac" layout on the copper surface according to his circuit
diagram. Be!t the untraced copper area
removed by a process called etching.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
9/40
• 2ltra-violet e!posure unit
Track layout design
2sing the same principles outlined in section a trac" layout is
drawn to scale on the transparency using the
white boardC mar"er. &t may be useful to insert graph paper
below the transparent sheet for accurate
dimensioning of the layout.
!hoto+etching
The principle behind photo-etching is to place the transparency
over the copper clad and to e!pose it to 2V
radiation hence leaving the trac" regions intact and softening
unused areas. ?irst the protective plastic film
is removed from the board. The traced transparency is then
placed over the board being careful to ensure
that the copper side of the design faces upwards. The
combination is ne!t placed in a 2V e!posure unit with
the transparency facing the fluorescent tubes inside the unit.
$t the trac" regions 2V radiation is prevented
from reaching the board and hence the photo sensitive remains
hardened in these regions. $fter an e!posure
of about ; minutes the board can be removed. The P59 is then
placed in a solution of caustic soda which
dissolves away any unhardened photo-sensitive area. $fter a few
minutes of development time the trac"
layout is apparent. The board is finally removed and rinsed in
cold water.
inal etching
$fter having allowed the trac"s to harden for about half an hour
the unmar"ed copper area is etched byferric chloride solution.
$) The folloing &oints should ,e noted*
• &t is a good idea to draft the trac" layout on graph paper
before drawing the final layout on the copper
clad.
• 2se an etch resist pen to draw the trac" layout on the copper
clad (the latter must be cleaned
initially).• The following lead spacing can be used as a rule of
thumb1 allow , mm for a =D * resistor A mm
for a signal diode D mm for 6%4Cs and ceramic capacitors. The
lead spacing may also be measured
before drawing.
• Terminals for the power supply input leads must also be
included on the layout.
• The arrangement of components must be well planned so as to
minimize the amount of cooper clad
board re'uired.
• $llow the in" to dry before etching.
"info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
10/40
3) "tching
The copper clad is now ready to be etched. &f the etchant is
available in powder form it needs to be mi!ed
with water in anon-corrodible container. $ powder to water ratio
of +1; by mass is about right. %tching time
may vary between , to as long as , minutes depending on the
concentration and temperature of the
etchant. The process can be accelerated by warming the solution
and by fre'uently agitating the etching bath.
The ferric chloride solution gradually dissolves any untraced
copper area. *hen etching is complete only
the trac" layout remains on the board. The latter is then
removed the bath and rinsed with clean water. The
etch resist in" is finally rubbed away with a P59 eraser or with
very fine grain sand paper.
-aking a !CB out of a &hoto+resist co&&er clad
,oard
The photo-resist board consists of a single or double sided
copper clad coated with a light-sensitive and the
latter is protected with a plastic which should be removed
before use. &ts advantage over the plain copper
clad board is that the trac" layout does not need to be drawn
directly on the board.
The use of etch+resist transfers
The use of pens to design trac" layouts may not give neat result
even when using a ruler. ?or instance it
may be difficult to draw trac"s with the same line *idth or to
draw well aligned terminals for &5Cs and
discrete devices %tch-resist P59 symbols and trac"s are
available for direct transfer to the copper clad or tothe
transparency. Transfer is by rubbing down the relevant symbol with
a soft pencil.
1#info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
11/40
3. Co'&onents Descri&tion
3.1 olar Tracker
3olar Trac"er is basically a device onto which solar panels are
fitted which trac"s the motion of the sun
across the s"y ensuring that the ma!imum amount of sunlight
stri"es the panels throughout the day. $fter finding the
sunlight the trac"er will try to navigate through the path ensuring
the best sunlight is detected.
The design of the 3olar Trac"er re'uires many components. The
design and construction of it could be
divided into si! main parts that would need to wor" together
harmoniously to achieve a smooth run for the
3olar Trac"er each with their main function. They are1
• 7ethods of Trac"er 7ount
• 7ethods of 4rives
• 3ensor and 3ensor 5ontroller
• 7otor and 7otor 5ontroller
• Trac"er 3olving $lgorithm
• 4ata $c'uisition=&nterface 5ard
3.2-ethods of Tracker -ount
1. ingle a4is solar trackers
3ingle a!is solar trac"ers can either have a horizontal or a
vertical a!le. The horizontal type is used in
tropical regions where the sun gets very high at noon but the
days are short. The vertical type is used in high
latitudes where the sun does not get very high but summer days
can be very long. The single a!is trac"ing
system is the simplest solution and the most common one
used.
2. Dou,le a4is solar trackers
4ouble a!is solar trac"ers have both a horizontal and a vertical
a!le and so can trac" the 3unCs apparent
motion e!actly anywhere in the *orld. This type of system is
used to control astronomical telescopes and so
there is plenty of software available to automatically predict
and trac" the motion of the sun across the s"y.
9y trac"ing the sun the efficiency of the solar panels can be
increased by ,-D,/.The dual a!is trac"ing
system is also used for concentrating a solar reflector toward
the concentrator on heliostat systems.
3.$ -ethods of Dri#e
1. (cti#e Trackers
$ctive Trac"ers use motors and gear trains to direct the trac"er
as commanded by a controller responding
to the solar direction. 6ight-sensing trac"ers typically have
two photo sensors such as photodiodes
11info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
12/40
configured differentially so that they output a null when
receiving the same light flu!. 7echanically they
should be omnidirectional and are aimed , degrees apart. This
will cause the steepest part of their cosine
transfer functions to balance at the steepest part which
translates into ma!imum sensitivity.
2. !assi#e Trackers
Passive Trac"ers use a low boiling point compressed gas fluid
that is driven to one side or the other by solar
heat creating gas pressure to cause the trac"er to move in
response to an imbalance.
3.3 ensors
$ sensor is a device that measures a physical 'uantity and
converts it into a signal which can be read by an
observer or by an instrument.
1. Light De&endent Resistor
6ight 4ependent 8esistor is made of a high-resistance
semiconductor. &t can also be referred to as a
photoconductor. &f light falling on the device is of
the high enough fre'uency photons absorbed by the
semiconductor give bound electrons enough energy to #ump into
the conduction band. The resulting free
electron conducts electricity thereby lowering resistance.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
13/40
2. !hotodiode
Photodiode is a light sensor which has a high speed and high
sensitive silicon P&B photodiode in a
miniature flat plastic pac"age. $ photodiode is designed to be
responsive to optical input. 4ue to its water
clear epo!y the device is sensitive to visible and infrared
radiation. The large active area combined with a
flat case gives a high sensitivity at a wide viewing angle.
Photodiodes can be used in either zero bias or
reverse bias. &n zero bias light falling on the diode causes
a voltage to develop across the device leading to
a current in the forward bias direction. This is called the
photovoltaic effect and is the basis for solar cells -
in fact a solar cell is #ust a large number of big cheap
photodiodes. 4iodes usually have e!tremely high
resistance when reverse biased. This resistance is reduced when
light of an appropriate fre'uency shines on
the #unction.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
14/40
This application note describes how to implement an e!act linear
speed controller for stepper motors. The
stepper motor is an electromagnetic device that converts digital
pulses into mechanical shaft rotation. 7any
advantages are achieved using this "ind of motors such as higher
simplicity since no brushes or contacts are
present low cost high reliability high tor'ue at low
speeds and high accuracy of motion. 7any systemswith stepper motors
need to control the acceleration=deceleration when changing the
speed. This application
note presents a driver with a demo application capable of
controlling acceleration as well as position and
speed.
?ig D. 3tepper 7otors
Theory
te&&er 'otor
This application note covers the theory about linear speed ramp
stepper motor control as well as the
realization of the controller itself. &t is assumed that the
reader is familiar with basic stepper motor operation
but a summary of the most relevant topics will be
given.
Bi&olar #s. Uni&olar ste&&er 'otors
The two common types of stepper motors are the bipolar motor and
the 2nipolar motor. The bipolar and
unipolar motors are similar e!cept that the 2nipolar has a
centre tap on each winding as shown in ?igure D.D
14info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
15/40
?ig D.D 9ipolar and 2nipolar stepper 7otor
Uni&olar ste&&er 'otor
3tepper motors are very accurate motors that are commonly used
in computer dis" drives printers and
cloc"s. 2nli"e dc motors which spin round freely when power is
applied stepper motors re'uire that their
power supply be continuously pulsed in specific patterns.
?or each pulse the stepper motor moves around
one step often ; degrees giving +D steps in a full
revolution.There are two main types of stepper motors -
2nipolar and 9ipolar. 2nipolar motors usually have four coils
which are switched on and off in a particular
se'uence. 9ipolar motors have two coils in which the current
flow is reversed in a similar se'uence. %ach of
the four coils in a 2nipolar stepper motor must be switched on
and off in a certain order to ma"e the motor
turn. 7any microprocessor systems use four output lines to
control the stepper motor each output line
controlling the power to one of the coils. $s the stepper motor
operates at ;V the standard transistor circuit
is re'uired to switch each coil. $s the coils create a bac" emf
when switched off a suppression diode on
each coil is also re'uired. The table below show the four
different steps re'uired to ma"e the motor turn.
Table D. 2nipolar stepper motor operation
te& Coil 1 Coil 2 Coil $ Coil 3
, ,
+ , ,
, ,
D , ,
, ,
6oo" carefully at the table D. and notice that a pattern is
visible. 5oil + is always the opposite or logical
BOT of coil . The same applies for coils and D. &t is
therefore possible to cut down the number of
microcontroller pins re'uired to #ust two by the use of two
additional BOT gates. ?ortunately the 4arlington
15info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
16/40
driver &5 26B+,, can be used to provide both the BOT and
4arlington driver circuits. &t also contains the
bac" emf suppression diodes so no e!ternal diodes are
re'uired.
Bi&olar te&&er 'otor
The bipolar stepper motor has two coils that must be controlled
so that the current flows in different
directions through the coils in a certain order. The changing
magnetic fields that these coils create cause the
rotor of the motor to move around in steps.
The bipolar motor needs current to be driven in both
directions through the windings and a full bridge
driver is needed as shown in ?igure D.; (a). The centre tap on
the 2nipolar motor allows a simpler driving
circuit shown in ?igure D.; (b) limiting the current flow to one
direction. The main drawbac" with the
2nipolar motor is the limited capability to energize all
windings at any time resulting in a lower tor'ue
compared to the bipolar motor. The 2nipolar stepper motor can be
used as a bipolar motor by disconnectingthe centre tap.
(a) (b)
?ig D.; 9ipolar and 2nipolar drivers with 7O3 transistors
I'&le'entation
$ wor"ing implementation written in 5 is included with this
application note. ?ull documentation of the
source code and compilation information is found by opening the
Greadme.html0 file included with the source
code. The demo application demonstrates linear speed control of
a stepper motor. The user can control the
stepper motor speed profile by issuing different commands using
the serial port and the $V8 will drive the
connected stepper motor accordingly. The demo application is
divided in three ma#or bloc"s as shown in the
16info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
17/40
bloc" diagram in ?igure D.E. There is one file for each
bloc" and also a file for 2$8T routines used by the
main routine.
?ig D.E 9loc" diagram of demo application
7ain c has a menu and a command interface giving the user
control of the stepper motor by a terminal
connected to the serial line. 3peed controller c calculates the
needed data and generates step pulses to ma"e
the stepper motor follow the desired speed profile. 3mdriver.c
counts the steps and outputs the correct
signals to control the stepper motor.
Ti'er interru&t
The timer interrupt generates the step pulses calls the function
3tep 5ounter ( ) and is only running when the
stepper motor is moving. The timer interrupt will operate in
four different states according to the speed
profile shown in ?igure D.: and this behaviour is realized
with a state machine in the timer interrupt shown
in ?igure D.A.
?ig D.: Operating states for different speed profile
parts
1info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
18/40
?ig D.A 3tate machine for timer interrupt
*hen the application starts or when the stepper motor is stopped
the state-machine remains in the state
3TOP. *hen setup calculations are done a new state is set and
the timer interrupt is enabled. *hen moving
more than one step the state-machine goes to $55%6. &f
moving only step the state is changed to 4%5%6.
*hen the state is changed to $55%6 the application accelerates
the stepper motor until either the desiredspeed is reached and the
state is changed to 82B or deceleration must start changing the
state to 4%5%6.
*hen the state is set to 82B the stepper motor is "ept at
constant speed until deceleration must start then
the state is changed to 4%5%6.&t will stay in 4%5%6 and
decelerate until the speed reaches zero desired
number of steps. The state is then changed to 3TOP.
3.6 -icrocontroller
$ microcontroller is a single chip that contains the processor
non-volatile memory for the program volatile
memory for input and output a cloc" and an &=O control unit
also called a computer on a chip billions of
microcontroller units are embedded each year in a myriad of
products from toys to appliances to
automobiles. ?or e!ample a single vehicle can use :, or more
microcontrollers. The following picture
describes a general bloc" diagram of microcontroller.
eatures
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
19/40
• %!tensive On-chip 4ebug 3upport
• Programming of ?lash %%P8O7 ?uses and 6oc" 9its through the
JT$ &nterface
Peripheral ?eatures
• Two A-bit Timer=5ounters with 3eparate Prescalers and 5ompare
7odes
• One E-bit Timer=5ounter with 3eparate Prescalers 5ompare 7ode
and 5apture
7ode
• 8eal Time 5ounter with 3eparate Oscillator
• ?our P*7 5hannels
• A-channel ,-bit $45
A 3ingle-ended 5hannels
: 4ifferential 5hannels in TK?P Pac"age Only
+ 4ifferential 5hannels with Programmable ain at ! ,! or
+,,!
•
9yte-oriented Two-wire 3erial &nterface• Programmable 3erial
23$8T
• 7aster=3lave 3P& 3erial &nterface
• Programmable *atchdog Timer with 3eparate On-chip
Oscillator
• On-chip $nalog 5omparator
3pecial 7icrocontroller ?eatures
• Power-on 8eset and Programmable 9rown-out 4etection
• &nternal 5alibrated 85 Oscillator
• %!ternal and &nternal &nterrupt 3ources
• 3i! 3leep 7odes1 &dle $45 Boise 8eduction Power-save
Power-down 3tandby
and %!tended 3tandby
&=O and Pac"ages
• + Programmable &=O 6ines
• D,-pin P4&P DD-lead TK?P and DD-pad K?B=76?
Operating Voltages
• +.: - ;.;V for $TmegaE6
• D.; - ;.;V for $TmegaE
3peed rades
• , - A 7
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
20/40
The $TmegaE is a low-power high-performance advance
8&35A-bit microcontroller with +I bytes of in-
system programmable ?lash memory. The on-chip ?lash allows the
program memory to be reprogrammed
in-system or by a conventional non-volatile memory programmer.
9y combining a versatile A-bit 5P2 with
in-system programmable ?lash on a monolithic chip the $tmel
$TmegaE is a powerful microcontroller
which provides a highly fle!ible and cost-effective solution to
many embedded control applications. The
$TmegaE provides the following standard features1+I
bytes of ?lash ,+D byte of %%P8O7 +I9
&BT%8B$6 3 8$7 + &=O lines *atch dog timer two data
pointers two E-bit timer=counters a si!-
vector two-level interrupt architecture a full duple! serial
port on-chip oscillatorA-channel , bit $45 and
cloc" circuitry. &n addition the $TmegaE is designed
with static logic for operation down to zero fre'uency
and supports two software selectable power saving modes. The
&dle 7ode stops the 5P2 while allowing the
8$7 timer=counters serial port and interrupt system to continue
functioning. The Power-down mode saves
the 8$7 con-tents but freezes the oscillator disabling all other
chip functions until the ne!t interrupt.
?ig D. Pin diagram of $TmegaE
O#er#ie+
The $TmegaE is a low-power 57O3 A-bit microcontroller based on
the $V8 enhanced 8&35 architecture.
9y e!ecuting powerful instructions in a single cloc" cycle the
$TmegaE achieves throughputs approaching
7&P3 per 7
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
21/40
7CC 4igital supply voltage
/ND round
!ort ( 8!(9 + !(:) Port $ serves as the analog inputs to the $=4
5onverter. Port $ also serves as an A-bit
bi-directional &=O port if the $=4 5onverter is not
used. Port pin scan provide internal pull-up resistors. The
Port $ output buffers have symmetrical drive characteristics
with both high sin" and source capability. *hen
pins P$, to P$:are used as inputs and are e!ternally
pulled low they will source current if the internal pull-
up resistors are activated. The Port $ pins are tri-stated when
a reset condition becomes active even if the
cloc" is not running.
!ort B 8!B9 + !B:) Port 9 is an A-bit bi-directional &=O
port with internal pull-up resistors. The Port 9
output buffers have symmetrical drive characteristics with both
high sin" and source capability. $s inputs
Port 9 pins that are e!ternally pulled low will source current
if the pull-up resistors are activated. The Port 9
pins are tri-stated when a reset condition becomes active
even if the cloc" is not running.
!ort C 8!C9 + !C:) Port 5 is an A-bit bi-directional &=O
port with internal pull-up resistors. The Port 5
output buffers have symmetrical drive characteristics with both
high sin" and source capability. $s inputs
Port 5 pins that are e!ternally pulled low will source current
if the pull-up resistors are activated. The Port 5
pins are tri-stated when a reset condition becomes active
even if the cloc" is not running. &f the JT$
interface is enabled; the pull-up resistors on pins P5;
(T4&) P5 (T73) and P5+ (T5I) will be activated
even if a reset occurs.
!ort D 8!D9 + !D:) Port 4 is an A-bit bi-directional &=O
port with internal pull-up resistors. The Port 4
output buffers have symmetrical drive characteristics with both
high sin" and source capability. $s inputs
Port 4 pins that are e!ternally pulled low will source current
if the pull-up resistors are activated. The Port 4
pins are tri-stated when a reset condition becomes active
even if the cloc" is not running.
R""T 8eset &nput. $ low level on this pin for longer than
the minimum pulse length will generate a reset
even if the cloc" is not running.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
22/40
(R" $8%? is the analog reference pin for the $=4 5onverter.
(lternate unctions of !ort (
Port $ has an alternate function as analog input for the $45 as
shown in Table D.+. &f some Port $ pins are
configured as outputs it is essential that these do not switch
when a conversion is in progress. This might
corrupt the result of the conversion.
Table D.+ Port $ Pins $lternate ?unctions
!ort !in (lternate unction
P$: $45: ($45 input channel :)
P$E $45E ($45 input channel E)
P$; $45; ($45 input channel ;)
P$D $45D ($45 input channel D)
P$ $45 ($45 input channel )
P$+ $45+ ($45 input channel +)
P$ $45 ($45 input channel )
P$, $45, ($45 input channel ,)
The alternate pin configuration of Port 9 is as follows1
= C > !ort B; Bit 9
35I1 7aster 5loc" output 3lave 5loc" input pin for 3P&
channel. *hen the 3P& is enabled as a 3lave this
pin is configured as an input regardless of the setting of
449:. *hen the 3P& is enabled as a 7aster the
data direction of this pin is controlled by 449:. *hen the pin
is forced by the 3P& to be an input the pull-up
can still be controlled by the PO8T9: bit.
= -IO > !ort B; Bit 6
7&3O1 7aster 4ata input 3lave 4ata output pin for 3P&
channel. *hen the 3P& is enabled as a 7aster this
pin is configured as an input regardless of the setting of
449E. *hen the 3P& is enabled as a 3lave the data
direction of this pin is controlled by 449E. *hen the pin is
forced by the 3P& to be an input the pull-up can
still be controlled by the PO8T9E bit.
= -OI > !ort B; Bit 5
7O3&1 3P& 7aster 4ata output 3lave 4ata input for
3P& channel. *hen the 3P& is enabled as a 3lave this
pin is configured as an input regardless of the setting of
449;. *hen the 3P& is enabled as a 7aster the
data direction of this pin is controlled by 449;. *hen the pin
is forced by the 3P& to be an input the pull-up
can still be controlled by the PO8T9; bit.
= > !ort B; Bit 3
22info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
23/40
331 3lave 3elect input. *hen the 3P& is enabled as a 3lave
this pin is configured as an input regardless of
the setting of 449D. $s a 3lave the 3P& is activated when
this pin is driven low. *hen the 3P& is enabled as
a 7aster the data direction of this pin is controlled by 449D.
*hen the pin is forced by the 3P& to be an
input the pull-up can still be controlled by the PO8T9D bit.
= (IN1?OC: > !ort B; Bit $
$&B $nalog 5omparator Begative &nput 5onfigure the port
pin as input with the internal pull-up switched
off to avoid the digital port function from interfering with the
function of the analog comparator. O5,
Output 5ompare 7atch output1 The P9 pin can serve as an e!ternal
output for the Timer=5ounter ,
5ompare 7atch. The P9 pin has to be configured as an output to
serve this function. The O5, pin is also
the output pin for the P*7 mode timer function.
= (IN:?INT2 > !ort B; Bit 2
$&B, $nalog 5omparator Positive input 5onfigure the port pin
as input with the internal pull-up switched
off to avoid the digital port function from interfering with the
function of the $nalog 5omparator. &BT+
%!ternal &nterrupt 3ource +1 The P9+ pin can serve as an
e!ternal interrupt source to the 752.
= T1 > !ort B; Bit 1
T Timer=5ounter 5ounter 3ource.
= T:? !ort B; Bit :
T, Timer=5ounter , 5ounter 3ource 5I 23$8T %!ternal 5loc". The
4ata 4irection 8egister 449,
controls whether the cloc" is output 449, set or input 449,
cleared. The 5I pin is active only when the
23$8T operates in 3ynchronous mode.
The alternate pin configuration of Port 5 is as follows1= TOC2
> !ort C; Bit 9
TO35+ Timer Oscillator pin +1 *hen the $3+ bit in $338 is set
one to enable asynchronous cloc"ing of
Timer=5ounter+ pin P5: is disconnected from the port and becomes
the inverting output of the Oscillator
amplifier. &n this mode a 5rystal Oscillator is connected to
this pin and the pin cannot be used as an &=O pin.
= TOC1 > !ort C; Bit 6
23info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
24/40
TO35 Timer Oscillator pin 1 *hen the $3+ bit in $338 is set one
to enable asynchronous cloc"ing of
Timer=5ounter+ pin P5E is disconnected from the port and becomes
the input of the inverting Oscillator
amplifier. &n this mode a 5rystal Oscillator is connected to
this pin and the pin cannot be used as an &=O pin.
= TDI > !ort C; Bit 5
T4& JT$ Test 4ata &n1 3erial input data to be shifted in
to the &nstruction 8egister or 4ata 8egister. *hen
the JT$ interface is enabled this pin cannot be used as an
&=O pin.
= TDO > !ort C; Bit 3
T4O JT$ Test 4ata Out1 3erial output data from &nstruction
8egister or 4ata 8egister. *hen the JT$
interface is enabled this pin cannot be used as an &=O pin.
The T4, pin is tri-stated unless T$P states that
shifts out data are entered.
= T- > !ort C; Bit $
T73 JT$ Test 7ode 3elect1 This pin is used for navigating
through the T$P-controller state machine.
*hen the JT$ interface is enabled this pin cannot be used as an
&=O pin.
= TC > !ort C; Bit 2
T5I JT$ Test 5loc"1 JT$ operation is synchronous to T5I. *hen
the JT$ interface is enabled this
pin cannot be used as an &=O pin.
D( > !ort C; Bit 1
34$ Two-wire 3erial &nterface 4ata1 *hen the T*%B bit in
T*58 is set one to enable the Two-wire
3erial &nterface pin P5 is disconnected from the port and
becomes the 3erial 4ata &=O pin for the Two-wire
3erial &nterface. &n this mode there is a spi"e filter
on the pin to suppress spi"es shorter than ;, ns on the
input signal and the pin is driven by an open drain driver with
slew-rate limitation. *hen this pin is used by
the Two-wire 3erial &nterface the pull-up can still be
controlled by the PO8T5 bit.
= CL > !ort C; Bit :
356 Two-wire 3erial &nterface 5loc"1 *hen the T*%B bit in
T*58 is set one to enable the Two-wire
3erial &nterface pin P5, is disconnected from the port and
becomes the 3erial 5loc" &=O pin for the Two-
wire 3erial &nterface. &n this mode there is a spi"e
filter on the pin to suppress spi"es shorter than ;, ns on
the input signal and the pin is driven by an open drain driver
with slew-rate limitation. *hen this pin is used
by the Two-wire 3erial &nterface the pull-up can still
be controlled by the PO8T 5, bit.
3.9 LCD Dis&lay
24info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
25/40
$ 6i'uid 5rystal 4isplay is an electronic device that can be
used to show numbers or te!t. There are two
main types of 654 display numeric display and alphanumeric te!t
displays. The display is made up of a
number of shaped Gcrystals0. &n numeric displays these
crystals are shaped into Gbars0 and in alphanumeric
displays the crystals are simply arranged into patterns of
Gdots0. %ach crystal has an individual electrical
connection so that each crystal can be controlled independently.
*hen the crystal is Goff0 i.e. when no current
is passed through the crystal the crystal reflect the same
amount of light as the bac"ground material and so
the crystals cannot be seen.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
26/40
?ig D. Transformer
&f a load is connected to the secondary circuit electric
charge will flow in the secondary winding of the
transformer and transfer energy from the primary circuit to the
load connected in the secondary circuit. The
secondary induced voltage V3 of an ideal transformer is scaled
from the primary VP by a factor e'ual to the
ratio of the number of turns of wire in their respective
windings1
N s
N p=
V s
V p
9y appropriate selection of the numbers of turns a transformer
thus allows an alternating voltage to be
stepped up - by ma"ing B3 more than BP or stepped down
by ma"ing it.
B(IC !(RT O ( TR(NOR-"R
&n its most basic form a transformer consists of1
• $ primary coil or winding.
• $ secondary coil or winding.
• $ core that supports the coils or windings.
8efer to the transformer circuit in figure as you read the
following e!planation1 The primary winding is
connected to a ;,-hertz ac voltage source. The magnetic field
builds up and collapses about the primary
winding. The e!panding and contracting magnetic field around the
primary winding cuts the secondary
winding and induces an alternating voltage into the winding.
This voltage causes alternating current to flow
through the load. The voltage may be stepped up or down
depending on the design of the primary and
secondary windings.
TA" CO-!ON"NT O ( TR(NOR-"R
Two coils of wire are wound on some type of core material.
&n some cases the coils of wire are wound on a
cylindrical or rectangular cardboard form. &n effect the
core material is air and the transformer is called an
26info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
27/40
air-core transformer. Transformers used at low fre'uencies such
as ;, hertz and D,, hertz re'uire a core of
low-reluctance magnetic material usually iron. This type of
transformer is called an iron-core transformer.
7ost power transformers are of the iron-core type. The principle
parts of a transformer and their functions
are1 The core which provides a path for the magnetic lines of
flu!. The Primary winding this receives
energy from the ac source. The secondary winding this receives
energy from the primary winding and
delivers it to the load. The enclosure this protects the above
components from dirt moisture and mechanical
damage.
3.BRID/" R"CTII"R
$ bridge rectifier ma"es use of four diodes in a bridge
arrangement to achieve full-wave rectification. This is
a widely used configuration both with individual diodes wired as
shown and with single component bridges
where the diode bridge is wired internally.
Basic o&eration
$ccording to the conventional model of current flow originally
established by 9en#amin ?ran"lin and still
followed by most engineers today current is assumed to flow
through electrical conductors from the positive
to the negative pole. &n actuality free electrons in a
conductor nearly always flow from the negative to the
positive pole. &n the vast ma#ority of applications
however the actual direction of current flow is irrelevant.
Therefore in the discussion below the conventional model is
retained. &n the diagrams below when the input
connected to the left corner of the diamond is positive and the
input connected to the right corner is
negative current flows from the upper supply terminal to the
right along the red(positive) path to the output
and returns to the lower supply terminal via the blue (negative)
path.
?ig D.+ 9ridge rectifier
*hen the input connected to the left corner is negative and the
input connected to the right corner is
positive current flows from the lower supply terminal to
the right along the red path to the output and
returns to the upper supply terminal via the blue path.
2info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
28/40
&n each case the upper right output remains positive and
lower right output negative. 3ince this is true
whether the input is $5 or 45 this circuit not only produces a
45 output from an $5 input it can also
provide what is sometimes called @reverse polarity
protection@. That is it permits normal functioning of 45-
powered e'uipment when batteries have been installed
bac"wards or when the leads from a 45 power
source have been reversed and protects the e'uipment from
potential damage caused by reverse polarity.
Prior to availability of integrated electronics such a bridge
rectifier was always constructed from discrete
components. 3ince about ;, a single four terminal component
containing the four diodes connected in the
bridge configuration became a standard commercial
component and is now available with various voltage
and current ratings.
Out&ut s'oothing
?or many applications especially with single phase $5 where the
full-wave bridge serves to convert an $5
input into a 45 output the addition of a capacitor may be
desired because the bridge alone supplies an
output of fi!ed polarity but continuously varying or pulsating
magnitude.
?ig D. 9ridge rectifier in parallel capacitor at the output
The function of this capacitor "nown as a reservoir capacitor is
to lessen the variation in the rectified $5
output voltage waveform from the bridge. One e!planation of
smoothing is that the capacitor provides a low
impedance path to the $5 component of the output reducing the $5
voltage across and $5 current through
the resistive load. &n less technical terms any drop in the
output voltage and current of the bridge tends to be
cancelled by loss of charge in the capacitor. This charge flows
out as additional current through the load.
Thus the change of load current and voltage is reduced relative
to what would occur without the capacitor.
&ncreases of voltage correspondingly store e!cess charge in
the capacitor thus moderating the change in
output voltage = current. The simplified circuit shown has a
well-deserved reputation for being dangerous
because in some applications the capacitor can retain a
lethal charge after the $5 power source is removed.
&f supplying a dangerous voltage a practical circuit should
include a reliable way to safely discharge the
capacitor. &f the normal load cannot be guaranteed to
perform this function perhaps because it can be
2!info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
29/40
disconnected the circuit should include a bleeder resistor
connected as close as practical across the
capacitor. This resistor should consume a current large enough
to discharge the capacitor in a reasonable
time but small enough to minimize unnecessary power waste.
9ecause a bleeder sets a minimum current
drain the regulation of the circuit defined as percentage
voltage change from minimum to ma!imum load is
improved.
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
30/40
?ig D.D 75T:A,;5T voltage regulator
Bormally we get fi!ed output by connecting the voltage
regulator at the output of the filtered 45 see in
above diagram. &t can also be used in circuits to get a low
45 voltage from a high 45 voltage for e!ample
we use :A,; to get ;V from +V. There are two types of voltage
regulators . fi!ed voltage regulators :A!!
:!! +. Variable voltage regulators in fi!ed voltage regulators
there is another classification . S ve voltage
regulators +.Hvevoltage regulators positive voltage regulators
this include :A!! voltage regulators. The most
commonly used ones are :A,; and :A+. :A,; gives fi!ed ;V 45
voltage if input voltage is in :.;V +,V.
:A,; is a voltage regulator integrated circuit.
&t is a member of :A!! series of fi!ed linear voltage
regulator
&5s. The voltage source in a circuit may have fluctuations
and would not give the fi!ed voltage output. The
voltage regulator &5 maintains the output voltage at a
constant value. The !! in :A!! indicates the fi!ed
output voltage it is designed to provide. :A,; provides S;V
regulated power supply. 5apacitors of suitable
values can be connected at input and output pins depending upon
the respective voltage levels.
3.11 The Ca&acitor ilter
The simple capacitor filter is the most basic type of power
supply filter. The application of the simple
capacitor filter is very limited. &t is sometimes used on
e!tremely high-voltage low current power supplies
for cathode ray and similar electron tubes which re'uire very
little load current from the supply. The
capacitor filter is also used where the power-supply ripple
fre'uency is not critical this fre'uency can be
relatively high. The capacitor 5 shown in figure D.; is a simple
filter connected across the output of the
rectifier in parallel with the load.
3#info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
31/40
?ig D.; ?ull wave rectifier with a capacitor filter
*hen this filter is used the 85 charge time of the filter
capacitor 5 must be short and the 85 discharge
time must be long to eliminate ripple action. &n other words
the capacitor must charge up fast preferably
with no discharge a tall. 9etter filtering also results when the
input fre'uency is high therefore the full-
wave rectifier output is easier to filter than that of the
half-wave rectifier because of its higher fre'uency. ?or
you to have a better understanding of the effect that filtering
has on % avg a comparison of a rectifier circuit
with a filter and one without a filter is illustrated in figure
D.E and figure D.:. The output waveforms in
figure D.E represent the unfiltered and figure D.: represents
filtered outputs of the half-wave rectifier
circuit. 5urrent pulses flow through the load resistance 86 each
time a diode conducts. The dashed line
indicates the average value of output voltage. ?or the half-wave
rectifier %avg is less than half of the pea"
output voltage. This value is still much less than that of the
applied voltage. *ith no capacitor connected
across the output of the rectifier circuit the waveform in
figure D.E has a large pulsating component
compared with the average or dc component. *hen a capacitor is
connected across the output figure D.:
the average value of output voltage %avg is increased due
to the filtering action of capacitor 5
UNILT"R"D
?ig D.E
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
32/40
ILT"R"D
?ig D.:
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
33/40
the discharge period gradually decreases until the time of the
ne!t half cycle of rectifier operation. Ieep in
mind that for good filtering the filter capacitor should charge
up as fast as possible and discharge as little as
possible as shown in ?igure D.A and figure D..
!OITI7" A(L+CCL"
?ig D.A 5apacitor filter circuit
N"/(TI7" A(L+CCL"
?ig D. 5apacitor filter circuit
3ince practical values of 5 and 86 ensure a more or less gradual
decrease of the discharge voltage a
substantial charge remains on the capacitor at the time of the
ne!t half cycle of operation. $s a result no
current can flow through the diode until the rising ac input
voltage at the anode of the diode e!ceeds the
voltage on the charge remaining on 5. The charge on 5 is the
cathode potential of the diode. *hen the
potential on the anode e!ceeds the potential on the
cathode the charge on 5 the diode again conducts and
5 begins to charge to appro!imately the pea" value of the
applied voltage. $fter the capacitor has charged
to its pea" value the diode will cut off and the capacitor will
start to discharge. 3ince the fall of the ac input
voltage on the anode is considerably more rapid than the
decrease on the capacitor voltage the cathode
'uic"ly become more positive than the anode and the diode ceases
to conduct. Operation of the simple
capacitor filter using a full-wave rectifier is basically the
same as that discussed for the half-wave rectifier.
33info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
34/40
8eferring to figure you should notice that because one of the
diodes is always conducting on alternation the
filter capacitor charges and discharges during each half cycle.
Bote that each diode conducts only for that
portion of time when the pea" secondary voltage is greater
than the charge across the capacitor.
?ig D.+, ?ull-wave rectifier with capacitor filter
$nother thing to "eep in mind is that the ripple component %
r of the output voltage is an ac voltage and the
average output voltage %avg is the dc component of the
output. 3ince the filter capacitor offers relatively low
impedance to ac the ma#ority of the ac component flows through
the filter capacitor. The ac component is
therefore bypassed around the load resistance and the entire dc
component % avg flows through the load
resistance. This statement can be clarified by using the formula
for 5 in a half wave and full-wave rectifier.
?irst you must establish some values for the circuit. $s you can
see from the calculations by doubling thefre'uency of the rectifier
you reduce the impedance of the capacitor by one-half. This allows
the ac
component to pass through the capacitor more easily. $s a result
a full wave rectifier output is much easier
to filter than that of a half-wave rectifier. 8emember the
smaller the 5 of the filter capacitor with respect to
the load resistance the better the filtering action.
c R1
2 π fC
3ince the largest possible capacitor will provide the best
filtering. 8emember also that the load resistance is
an important consideration. &f load resistance is made small
the load current increases and the average value
of output voltage %avg decreases. The 85 discharge time constant
is a direct function of the value of the
load resistance therefore the rate of capacitor voltage
discharge is a direct function of the current through the
load. The greater load current the more rapid the discharge of
the capacitor and the lower the average value
of output voltage. ?or this reason the simple capacitive filter
is seldom used with rectifier circuits that must
supply a relatively large load current. 2sing the simple
capacitive filter in con#unction with a full-wave or
bridge rectifier provides improved filtering because the
increased ripple fre'uency decreases the capacitive
reactance of the filter capacitor.
34info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
35/40
3.12 Light "'itting Diode
$n 6%4 is a very simple electronics component which lights up
when electricity flows through it. 3ince it is
a diode electricity can only flow one way. There is usually a
flat section on the side of the 6%4 to mar" its
polarity1 this side should be connected to ground. This
side usually also has a shorter leg. &n order to prevent
too much current flowing through an 6%4 and damaging it it
should be connected in series with a resistor.
?ig D.+ 6ight %mitting 4iode
3.1$ Resistor
$ resistor is a component of a circuit that resists the flow of
electrical current. &t has two terminals across
which electricity must pass and it is designed to drop the
voltage of the current as it flows from one terminal
to the other. 8esistors are primarily used to create and
maintain "nown safe currents within electrical
components. 8esistance is measured in ohms after OhmCs law. This
law states that electrical resistance is
e'ual to the drop in voltage across the terminals of the
resistor divided by the current being applied. $ high
ohm rating indicates a high resistance to current. This rating
can be written in a number of different ways -
for e!ample A8 represents A ohms while AI represents A,,, ohms.
7aterials in general have a
characteristic behavior of opposing the flow of electric charge.
This opposition is due to the collisions
between electrons that ma"e up the materials. This
physical property or ability to resist current is "nown as
resistance and is represented by the symbol R. 8esistance
is e!pressed in ohms which is symbolized by the
capital ree" letter omega.
The resistance of any material is dictated by four factors1
• 7aterial property-each material will oppose the flow of
current differently.
• 6ength-the longer the length the more is the probability of
collisions and hence the larger the
resistance.
• 5ross-sectional area-the larger the area A the easier it
becomes for electrons to flow and hence the
lower the resistance.
• Temperature-typically for metals as temperature increases the
resistance increases.
The amount of resistance offered by a resistor is determined by
its physical construction. $ carbon
composition resistor has resistive carbon pac"ed into a ceramic
cylinder while a carbon film resistor consists
of a similar ceramic tube but has conductive carbon film wrapped
around the outside. 7etal film or metal
35info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
36/40
o!ide resistors are made much the same way but with metal
instead of carbon. $ wire wound resistor made
with metal wire wrapped around clay plastic or fibre glass
tubing offers resistance at higher power levels.
Those used for applications that must withstand high
temperatures are typically made of materials such as
cermets a ceramic-metal composite or tantalum a rare metal so
that they can endure the heat.
8esistors are coated with paint or enamel or covered in moulded
plastic to protect them. 9ecause they are
often too small to be written on a standardized color-coding
system is used to identify them. The first three
colors represent ohm value and a fourth indicates the tolerance
or how close by percentage the resistor is to
its ohm value. This is important for two reasons1 the nature of
its construction is imprecise and if used above
its ma!imum current the value can change or the unit itself can
burn up. The circuit element used to model
the current-resisting behavior of a material is the
resistor . ?or the purpose of constructing circuits
resistors
shown in ?igure D.++ are usually made from metallic alloys and
carbon compounds. The resistor is the
simplest passive element.
?ig D.++ from top to bottom1
1
4 *
1
2 * and -* resistors
T!" O R"IT"R
4ifferent types of resistors have been created to meet different
re'uirements. 3ome resistors are shown in
?igure D.+. The primary functions of resistors are to limit
current divide voltage and dissipate heat. $
resistor is either fi!ed or variable. 7ost resistors are of the
fi!ed type that is their resistance remains
constant. The two common types of fi!ed resistors wire wound and
composition are shown in ?igure D.+D.
*ire wound resistors are used when there is a need to dissipate
a large amount of heat while the compositionresistors are used when
large resistance is needed.
36info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
37/40
?ig D.+ 4ifferent types of resistors
(a) (b)
?ig D.+D ?i!ed resistors1 (a) wire wound type (b) 5arbon film
type
R"ITOR COLOUR COD"
3ome resistors are physically large enough to have their values
printed on them. Other resistors are too small
to have their values printed on them. ?or such small resistors
color coding provides a way of determining the
value of resistance. $s shown in ?igure D.+; the color coding
consists of three four or five bands of color
around the resistor.
?ig D.+; 5olor coding
3info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
38/40
The first three bands specify the value of the resistance. 9ands
$ and 9 represent the first and second digits
of the resistance value and 5 is usually given as a power of ,
as shown in figure D.+;. &f present the fourth
band 4 indicates the tolerance percentage. ?or e!ample a ;
percent tolerance indicates that the actual value
of the resistance is within U ; of the color-coded value. *hen
the fourth band is absent the tolerance is ta"en
by default to be U +, percent. The fifth band % if present
is used to indicate a reliability factor which is a
3tatistical indication of the e!pected number of components that
will fail to have the indicated resistance
after wor"ing for ,,, hours. $s shown in ?igure D.+; the
statement 9ig 9oys 8ace Our Woung irls 9ut
Violet enerally *insX can serve as a memory aid in remembering
the color code.
5. CONCLUION
?rom the design of e!perimental set up with 7icro 5ontroller
9ased 3olar Trac"ing 3ystem 2sing 3tepper
7otor &f we compare Trac"ing by the use of 648 with ?i!ed
3olar Panel 3ystem we found that the
efficiency of 7icro 5ontroller 9ased 3olar Trac"ing 3ystem is
improved by ,-D;/ and it was found that
all the parts of the e!perimental setup are giving good results.
The re'uired Power is used to run the motor
by using 3tep-4own T=? by using ++,V $5. 7oreover this
trac"ing system does trac" the sun in a
continuous manner. $nd this system is more efficient and cost
effective in long run. ?rom the results it isfound that by
automatic trac"ing system there is , / gain in increase of
efficiency when compared with
non-trac"ing system. The solar trac"er can be still enhanced
additional features li"e rain protection and wind
protection which can be done as future wor".
3!info4eee | Information For Electrical & Electronics
Engineering
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
39/40
6. R""R"NC"
YZ 8iz" J. and 5hai"o W. 3olar Trac"ing 3ystem1 7ore %fficient
2se of 3olar PanelsX *orld $cademy of
3cience %ngineering and Technology D +,,A.
Y+Z ?ilfil $hmed Basir 7ohussen 4eia
-
8/16/2019 Solartrackingsystem Report 130603013827 Phpapp01
40/40