Embed Size (px)
Citation preview
Funktionsbeispiel Nr. MC-FE-I-006-V11-DE
SINAMICS S120 Safety Integrated Extended Functions
Fehlersichere Antriebe Ansteuerung der CU320 über PROFIsafe mit PROFIBUS
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 2/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Vorbemerkung Die Funktionsbeispiele zum Thema "Safety Integrated" sind funktionsfähige und getestete Automatisierungskonfigurationen auf Basis von I DT & IA Standardprodukten für die einfache, schnelle und kostengünstige Realisierung von Automatisierungsaufgaben in der Sicherheitstechnik. Jedes der vorliegenden Funktionsbeispiele deckt dabei eine häufig vorkommende Teilaufgabe einer typischen Kundenproblemstellung innerhalb der Sicherheitstechnik ab.
Neben der Aufzählung aller benötigten Soft- und Hardware-Komponenten und der Beschreibung deren Verschaltung miteinander beinhalten die Funktionsbeispiele getesteten und kommentierten Code. Damit können die hier beschriebenen Funktionalitäten innerhalb kurzer Zeit nachgestellt und so auch als Basis für individuelle Erweiterungen genutzt werden.
Wichtiger Hinweis Die Safety-Funktionsbeispiele sind unverbindlich und erheben keinen Anspruch auf Vollständigkeit hinsichtlich Konfiguration und Ausstattung sowie jeglicher Eventualitäten. Die Safety-Funktionsbeispiele stellen keine kundenspezifischen Lösungen dar, sondern sollen lediglich Hilfestellung bieten bei typischen Aufgabenstellungen. Sie sind für den sachgemäßen Betrieb der beschrieben Produkte selbst verantwortlich.
Diese Safety-Funktionsbeispiele entheben Sie nicht der Verpflichtung zu sicherem Umgang bei Anwendung, Installation, Betrieb und Wartung. Durch Nutzung dieser Safety-Funktionsbeispiele erkennen Sie an, dass Siemens über die oben beschriebene Haftungsregelung hinaus nicht für etwaige Schäden haftbar gemacht werden kann. Wir behalten uns das Recht vor, Änderungen an diesen Safety-Funktionsbeispielen jederzeit ohne Ankündigung durchzuführen. Bei Abweichungen zwischen den Vorschlägen in diesen Safety-Funktionsbeispielen und anderen Siemens-Publikationen, wie z. B. Katalogen, hat der Inhalt der anderen Dokumentation Vorrang.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 3/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Inhaltsverzeichnis
1 Gewährleistung, Haftung und Support ......................................................... 4
2 Automatisierungsfunktion ............................................................................. 5 2.1 Beschreibung des Funktionsbeispiels .............................................................. 5 2.2 PROFIsafe-Kommunikation .............................................................................. 8 2.3 Vorteile / Kundennutzen ................................................................................... 9
3 Erforderliche Komponenten ........................................................................ 10 3.1 Hardware-Komponenten................................................................................. 10 3.2 Software-Komponenten .................................................................................. 11 3.2.1 Engineering-Software ..................................................................................... 11 3.2.2 Firmware......................................................................................................... 11
4 Aufbau und Verdrahtung ............................................................................. 12 4.1 Übersicht zum Hardware-Aufbau.................................................................... 12 4.2 Verdrahtung der Hardware-Komponenten...................................................... 13 4.2.1 Verdrahtung Steuerspannung......................................................................... 13 4.2.2 DRIVE-CLiQ-Verschaltung ............................................................................. 14 4.3 Wichtige Einstellungen an den Hardware-Komponenten ............................... 15 4.3.1 Bus-Schnittstellen ........................................................................................... 15 4.3.2 Voraussetzungen zum Betrieb........................................................................ 17
5 Übersicht und Bedienung ............................................................................ 18 5.1 Beschreibung der Bedienung ......................................................................... 18 5.2 Zusammenfassung der Eingabesignale ......................................................... 19
6 Beispielprojekt .............................................................................................. 20 6.1 Passwörter...................................................................................................... 20 6.2 Hardware-Konfiguration der fehlersicheren Steuerung .................................. 21 6.3 SINAMICS-Parametrierung ............................................................................ 25 6.4 SIMATIC – Erstellung des Standardprogramms............................................. 36 6.5 Programmierung der fehlersicheren Steuerung.............................................. 37 6.6 Parametrierung der Ansteuerung der Sicherheitsfunktionen (PROFIsafe)..... 43 6.7 SINAMICS - Parametrierung der antriebsintegrierten Sicherheitsfunktionen . 46 6.8 Download des Beispielprojekts....................................................................... 52 6.8.1 Laden der Projektierung der S7-F-CPU.......................................................... 52 6.8.2 Laden der Projektierung des SINAMICS S120............................................... 53 6.9 Abnahmetest................................................................................................... 54
7 Historie .......................................................................................................... 54

SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 4/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
1 Gewährleistung, Haftung und Support
Für die in diesem Dokument enthaltenen Informationen übernehmen wir keine Gewähr.
Unsere Haftung, gleich aus welchem Rechtsgrund, für durch die Verwen-dung der in diesem Safety-Funktionsbeispiel beschriebenen Beispiele, Hinweise, Programme, Projektierungs- und Leistungsdaten usw. verursach-te Schäden ist ausgeschlossen, soweit nicht z. B. nach dem Produkthaf-tungsgesetz in Fällen des Vorsatzes, der groben Fahrlässigkeit, wegen der Verletzung des Lebens, des Körpers oder der Gesundheit, wegen einer Übernahme der Garantie für die Beschaffenheit einer Sache, wegen des arglistigen Verschweigens eines Mangels oder wegen Verletzung wesentli-cher Vertragspflichten zwingend gehaftet wird. Der Schadensersatz wegen Verletzung wesentlicher Vertragspflichten ist jedoch auf den vertragstypi-schen, vorhersehbaren Schaden begrenzt, soweit nicht Vorsatz oder grobe Fahrlässigkeit vorliegt oder wegen der Verletzung des Lebens, des Körpers oder der Gesundheit zwingend gehaftet wird. Eine Änderung der Beweis-last zu Ihrem Nachteil ist hiermit nicht verbunden.
Copyright© 2009 Siemens I DT. Weitergabe oder Vervielfältigung dieser Applikationsbeispiele oder Auszüge daraus sind nicht gestattet, soweit nicht ausdrücklich von Siemens I DT zugestanden.
Bei Fragen zu diesem Beitrag wenden Sie sich bitte über folgende E-Mail-Adresse an uns: [email protected]
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 5/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
2 Automatisierungsfunktion
2.1 Beschreibung des Funktionsbeispiels
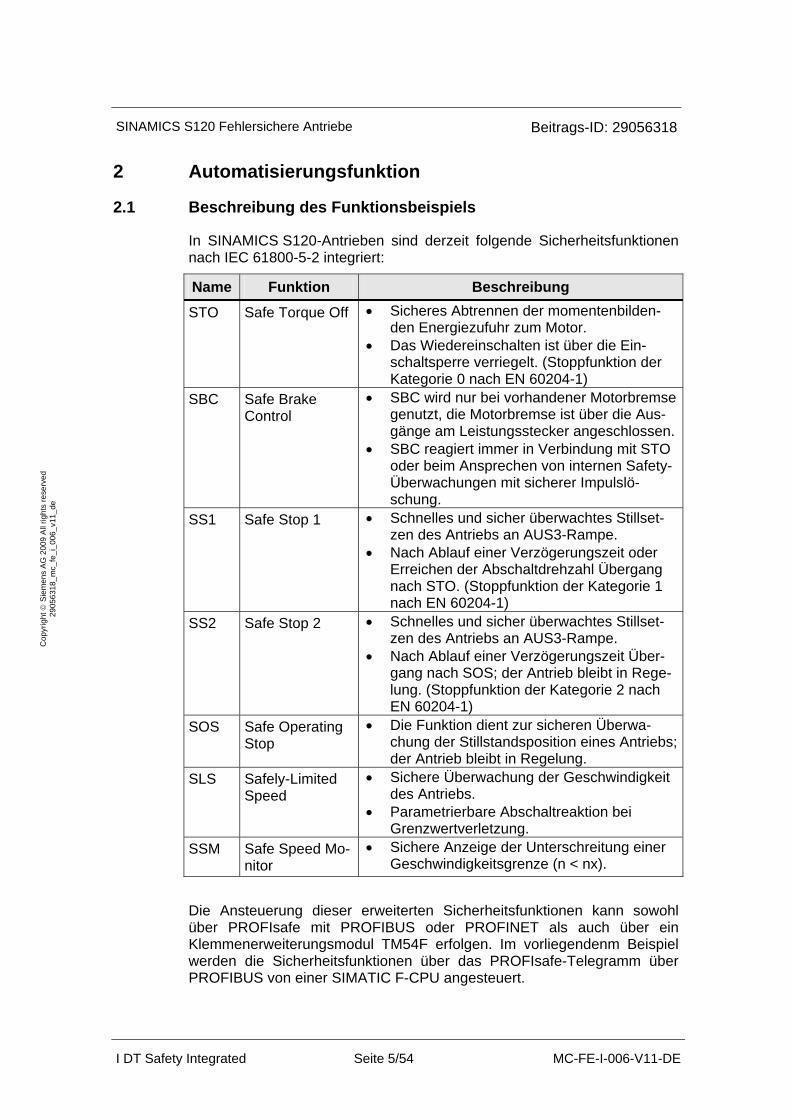
In SINAMICS S120-Antrieben sind derzeit folgende Sicherheitsfunktionen nach IEC 61800-5-2 integriert:
Name Funktion Beschreibung
STO Safe Torque Off • Sicheres Abtrennen der momentenbilden-den Energiezufuhr zum Motor.
• Das Wiedereinschalten ist über die Ein-schaltsperre verriegelt. (Stoppfunktion der Kategorie 0 nach EN 60204-1)
SBC Safe Brake Control
• SBC wird nur bei vorhandener Motorbremse genutzt, die Motorbremse ist über die Aus-gänge am Leistungsstecker angeschlossen.
• SBC reagiert immer in Verbindung mit STO oder beim Ansprechen von internen Safety-Überwachungen mit sicherer Impulslö-schung.
SS1 Safe Stop 1 • Schnelles und sicher überwachtes Stillset-zen des Antriebs an AUS3-Rampe.
• Nach Ablauf einer Verzögerungszeit oder Erreichen der Abschaltdrehzahl Übergang nach STO. (Stoppfunktion der Kategorie 1 nach EN 60204-1)
SS2 Safe Stop 2 • Schnelles und sicher überwachtes Stillset-zen des Antriebs an AUS3-Rampe.
• Nach Ablauf einer Verzögerungszeit Über-gang nach SOS; der Antrieb bleibt in Rege-lung. (Stoppfunktion der Kategorie 2 nach EN 60204-1)
SOS Safe Operating Stop
• Die Funktion dient zur sicheren Überwa-chung der Stillstandsposition eines Antriebs; der Antrieb bleibt in Regelung.
SLS Safely-Limited Speed
• Sichere Überwachung der Geschwindigkeit des Antriebs.
• Parametrierbare Abschaltreaktion bei Grenzwertverletzung.
SSM Safe Speed Mo-nitor
• Sichere Anzeige der Unterschreitung einer Geschwindigkeitsgrenze (n < nx).
Die Ansteuerung dieser erweiterten Sicherheitsfunktionen kann sowohl über PROFIsafe mit PROFIBUS oder PROFINET als auch über ein Klemmenerweiterungsmodul TM54F erfolgen. Im vorliegendenm Beispiel werden die Sicherheitsfunktionen über das PROFIsafe-Telegramm über PROFIBUS von einer SIMATIC F-CPU angesteuert.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Aufgabenstellung Die in den SINAMICS S120-Antrieben integrierten erweiterten Sicherheits-funktionen sollen über PROFIsafe mit PROFIBUS angesteuert werden. Beide Antriebe verwenden unterschiedliche Sicherheitsfunktionen. Die si-cherheitsgerichtete logische Verarbeitung der Eingangssignale wird in einer F-CPU erledigt. Die F-CPU ist sowohl F-Master als auch PROFIBUS-Master.
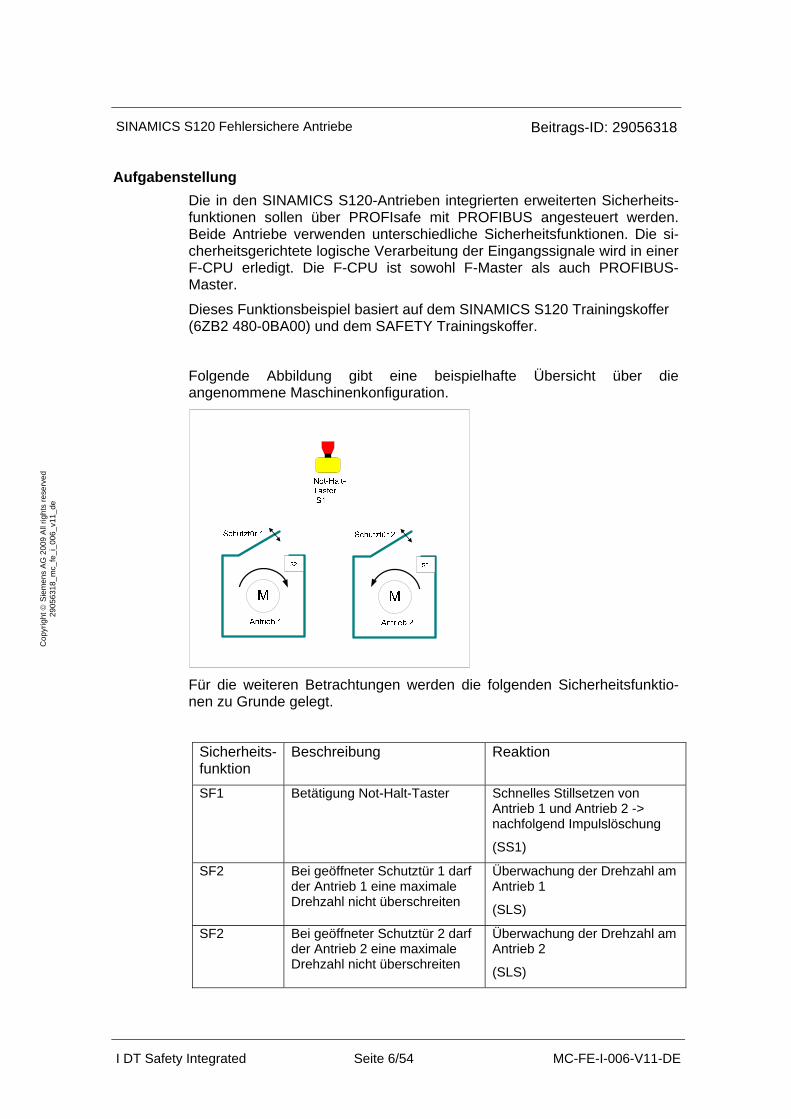
Dieses Funktionsbeispiel basiert auf dem SINAMICS S120 Trainingskoffer (6ZB2 480-0BA00) und dem SAFETY Trainingskoffer.
Folgende Abbildung gibt eine beispielhafte Übersicht über die angenommene Maschinenkonfiguration.
I DT Safety Integrated Seite 6/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Für die weiteren Betrachtungen werden die folgenden Sicherheitsfunktio-nen zu Grunde gelegt.
Sicherheits-funktion
Beschreibung Reaktion
SF1 Betätigung Not-Halt-Taster Schnelles Stillsetzen von Antrieb 1 und Antrieb 2 -> nachfolgend Impulslöschung
(SS1)
SF2 Bei geöffneter Schutztür 1 darf der Antrieb 1 eine maximale Drehzahl nicht überschreiten
Überwachung der Drehzahl am Antrieb 1
(SLS)
SF2 Bei geöffneter Schutztür 2 darf der Antrieb 2 eine maximale Drehzahl nicht überschreiten
Überwachung der Drehzahl am Antrieb 2
(SLS)
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
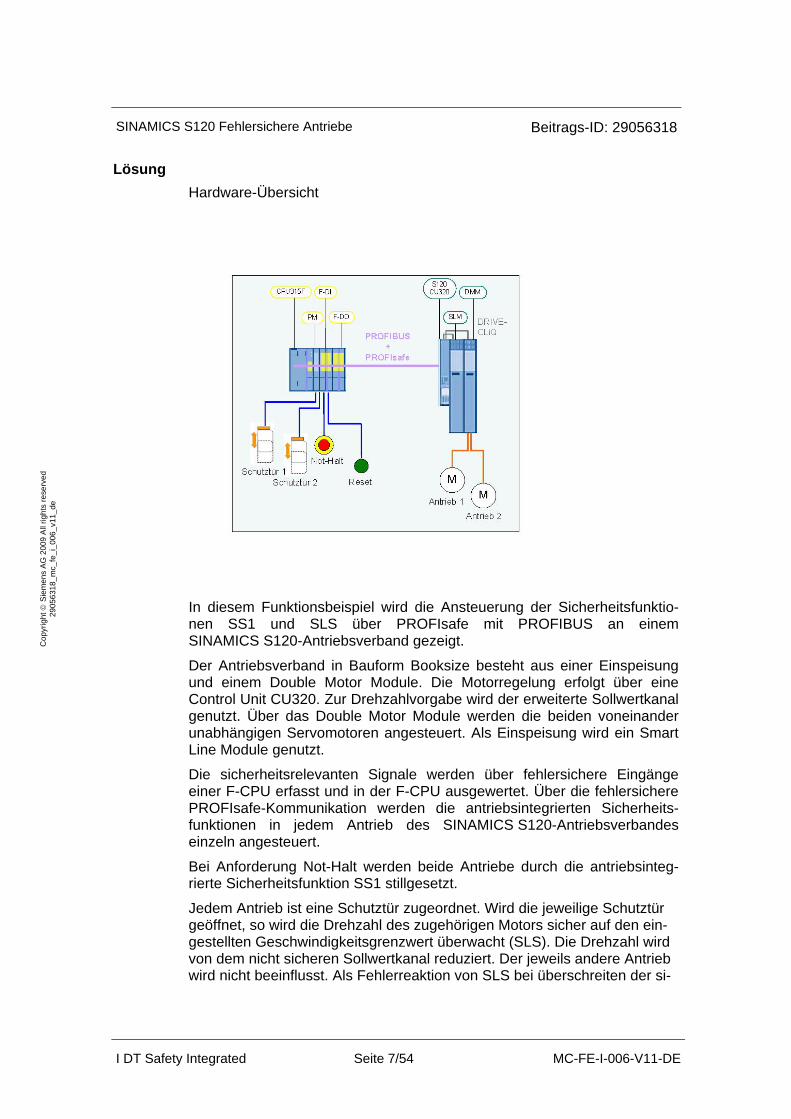
Lösung Hardware-Übersicht
I DT Safety Integrated Seite 7/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
In diesem Funktionsbeispiel wird die Ansteuerung der Sicherheitsfunktio-nen SS1 und SLS über PROFIsafe mit PROFIBUS an einem SINAMICS S120-Antriebsverband gezeigt.
Der Antriebsverband in Bauform Booksize besteht aus einer Einspeisung und einem Double Motor Module. Die Motorregelung erfolgt über eine Control Unit CU320. Zur Drehzahlvorgabe wird der erweiterte Sollwertkanal genutzt. Über das Double Motor Module werden die beiden voneinander unabhängigen Servomotoren angesteuert. Als Einspeisung wird ein Smart Line Module genutzt.
Die sicherheitsrelevanten Signale werden über fehlersichere Eingänge einer F-CPU erfasst und in der F-CPU ausgewertet. Über die fehlersichere PROFIsafe-Kommunikation werden die antriebsintegrierten Sicherheits-funktionen in jedem Antrieb des SINAMICS S120-Antriebsverbandes einzeln angesteuert.
Bei Anforderung Not-Halt werden beide Antriebe durch die antriebsinteg-rierte Sicherheitsfunktion SS1 stillgesetzt.
Jedem Antrieb ist eine Schutztür zugeordnet. Wird die jeweilige Schutztür geöffnet, so wird die Drehzahl des zugehörigen Motors sicher auf den ein-gestellten Geschwindigkeitsgrenzwert überwacht (SLS). Die Drehzahl wird von dem nicht sicheren Sollwertkanal reduziert. Der jeweils andere Antrieb wird nicht beeinflusst. Als Fehlerreaktion von SLS bei überschreiten der si-
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 8/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
cheren Geschwindigkeit wird STOP C (SS2 → SOS) am jeweiligen Antrieb ausgelöst.
Andere Varianten zur Ansteuerung der antriebsintegrierten Sicherheitsfunk-tionen unter Verwendung des Klemmenerweiterungsmoduls TM54F sowie der Ansteuerung über PROFIsafe werden in weiteren Funktionsbeispielen beschrieben.
2.2 PROFIsafe-Kommunikation
Jeder Antrieb mit projektiertem PROFIsafe-Slot im Antriebsgerät repräsen-tiert einen PROFIsafe-Slave (F-Slave) mit einer fehlersicheren Kommunika-tion zum F-Master(F-Host) über PROFIBUS.
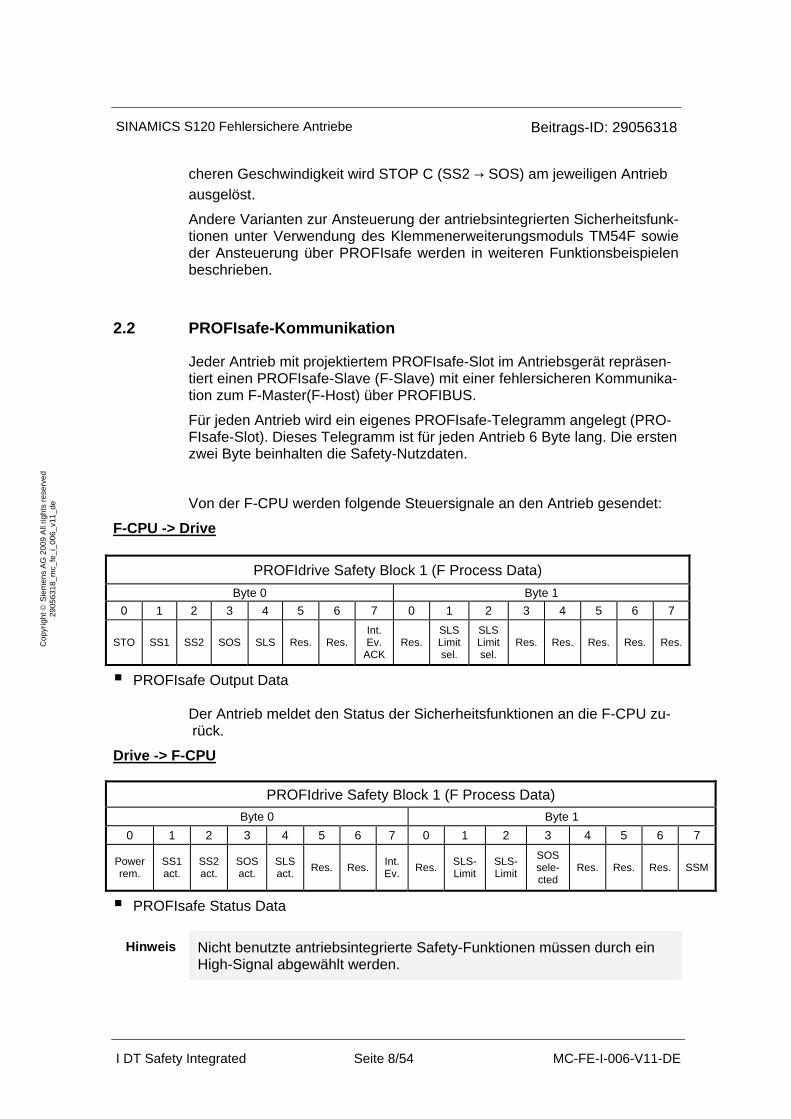
Für jeden Antrieb wird ein eigenes PROFIsafe-Telegramm angelegt (PRO-FIsafe-Slot). Dieses Telegramm ist für jeden Antrieb 6 Byte lang. Die ersten zwei Byte beinhalten die Safety-Nutzdaten.
Von der F-CPU werden folgende Steuersignale an den Antrieb gesendet:
F-CPU -> Drive
PROFIdrive Safety Block 1 (F Process Data) Byte 0 Byte 1
0 1 2 3 4 5 6 7 0 1 2 3 4 5 6 7
STO SS1 SS2 SOS SLS Res. Res. Int. Ev.
ACK Res.
SLS Limit sel.
SLS Limit sel.
Res. Res. Res. Res. Res.
PROFIsafe Output Data
Der Antrieb meldet den Status der Sicherheitsfunktionen an die F-CPU zu-rück.
Drive -> F-CPU
PROFIdrive Safety Block 1 (F Process Data) Byte 0 Byte 1
0 1 2 3 4 5 6 7 0 1 2 3 4 5 6 7
Power rem.
SS1 act.
SS2 act.
SOS act.
SLS act. Res. Res. Int.
Ev. Res. SLS- Limit
SLS- Limit
SOS sele-cted
Res. Res. Res. SSM
PROFIsafe Status Data
Hinweis Nicht benutzte antriebsintegrierte Safety-Funktionen müssen durch ein High-Signal abgewählt werden.

SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 9/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
2.3 Vorteile / Kundennutzen
• Einfache Ansteuerung der im Antrieb integrierten Sicherheitsfunktionen
• Einfacher Aufbau durch standardisierte Technik
• Das bestehende System ist schnell und einfach erweiterbar.
• Platzsparender und kostengünstiger Aufbau durch integrierte Sicher-heitsfunktionen – keine zusätzliche Hardware notwendig
• Komplexe Sicherheitskonzepte lassen sich auf dieser Basis realisieren.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 10/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
3 Erforderliche Komponenten
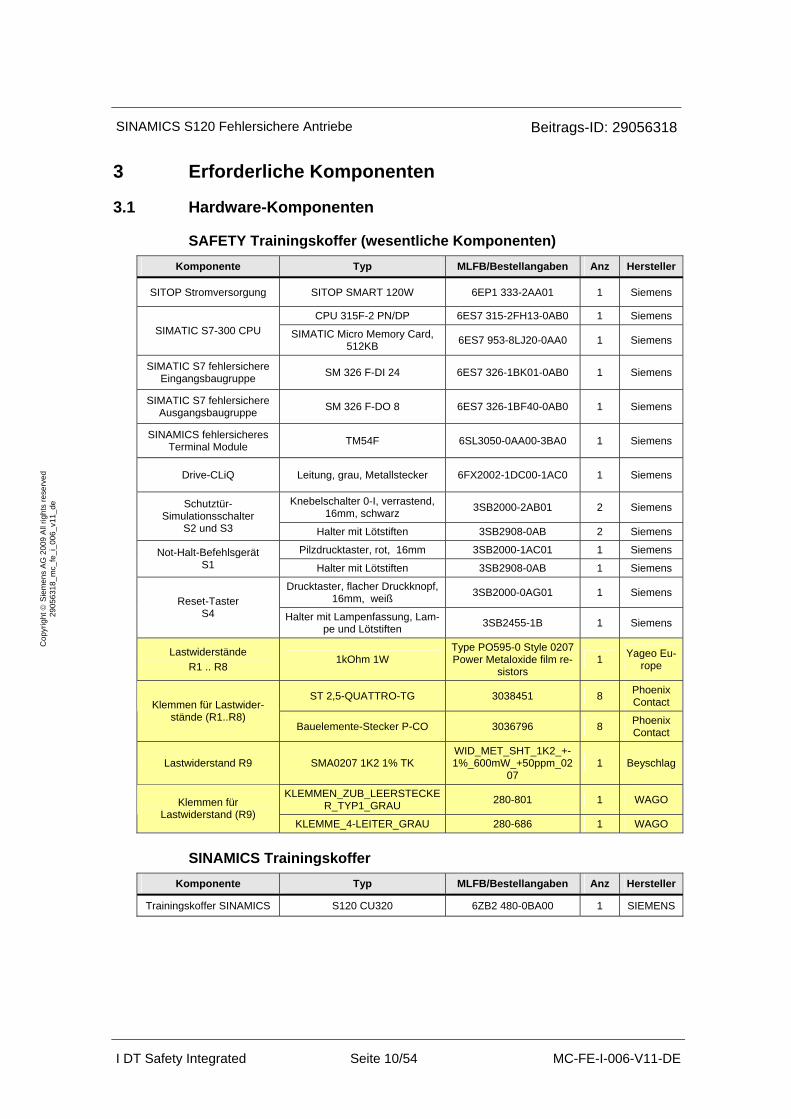
3.1 Hardware-Komponenten
SAFETY Trainingskoffer (wesentliche Komponenten) Komponente Typ MLFB/Bestellangaben Anz Hersteller
SITOP Stromversorgung SITOP SMART 120W 6EP1 333-2AA01 1 Siemens
CPU 315F-2 PN/DP 6ES7 315-2FH13-0AB0 1 Siemens SIMATIC S7-300 CPU SIMATIC Micro Memory Card,
512KB 6ES7 953-8LJ20-0AA0 1 Siemens
SIMATIC S7 fehlersichere Eingangsbaugruppe SM 326 F-DI 24 6ES7 326-1BK01-0AB0 1 Siemens
SIMATIC S7 fehlersichere Ausgangsbaugruppe SM 326 F-DO 8 6ES7 326-1BF40-0AB0 1 Siemens
SINAMICS fehlersicheres Terminal Module TM54F 6SL3050-0AA00-3BA0 1 Siemens
Drive-CLiQ Leitung, grau, Metallstecker 6FX2002-1DC00-1AC0 1 Siemens
Knebelschalter 0-I, verrastend, 16mm, schwarz 3SB2000-2AB01 2 Siemens Schutztür-
Simulationsschalter S2 und S3 Halter mit Lötstiften 3SB2908-0AB 2 Siemens
Pilzdrucktaster, rot, 16mm 3SB2000-1AC01 1 Siemens Not-Halt-Befehlsgerät S1 Halter mit Lötstiften 3SB2908-0AB 1 Siemens
Drucktaster, flacher Druckknopf, 16mm, weiß 3SB2000-0AG01 1 Siemens
Reset-Taster S4 Halter mit Lampenfassung, Lam-
pe und Lötstiften 3SB2455-1B 1 Siemens
Lastwiderstände R1 .. R8
1kOhm 1WType PO595-0 Style 0207 Power Metaloxide film re-
sistors1 Yageo Eu-
rope
ST 2,5-QUATTRO-TG 3038451 8 Phoenix Contact Klemmen für Lastwider-
stände (R1..R8)Bauelemente-Stecker P-CO 3036796 8 Phoenix
Contact
Lastwiderstand R9 SMA0207 1K2 1% TKWID_MET_SHT_1K2_+-1%_600mW_+50ppm_02
071 Beyschlag
KLEMMEN_ZUB_LEERSTECKER_TYP1_GRAU 280-801 1 WAGO Klemmen für
Lastwiderstand (R9) KLEMME_4-LEITER_GRAU 280-686 1 WAGO
SINAMICS Trainingskoffer Komponente Typ MLFB/Bestellangaben Anz Hersteller
Trainingskoffer SINAMICS S120 CU320 6ZB2 480-0BA00 1 SIEMENS
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 11/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Hinweis Das Funktionsbeispiel wurde mit den hier aufgeführten Hardware-Komponenten getestet. Alternativ können auch andere, funktional gleichwertige Komponenten verwendet werden. In einem solchen Fall ist ggf. eine andere Parametrierung und eine andere Verdrahtung der Komponenten erforderlich.
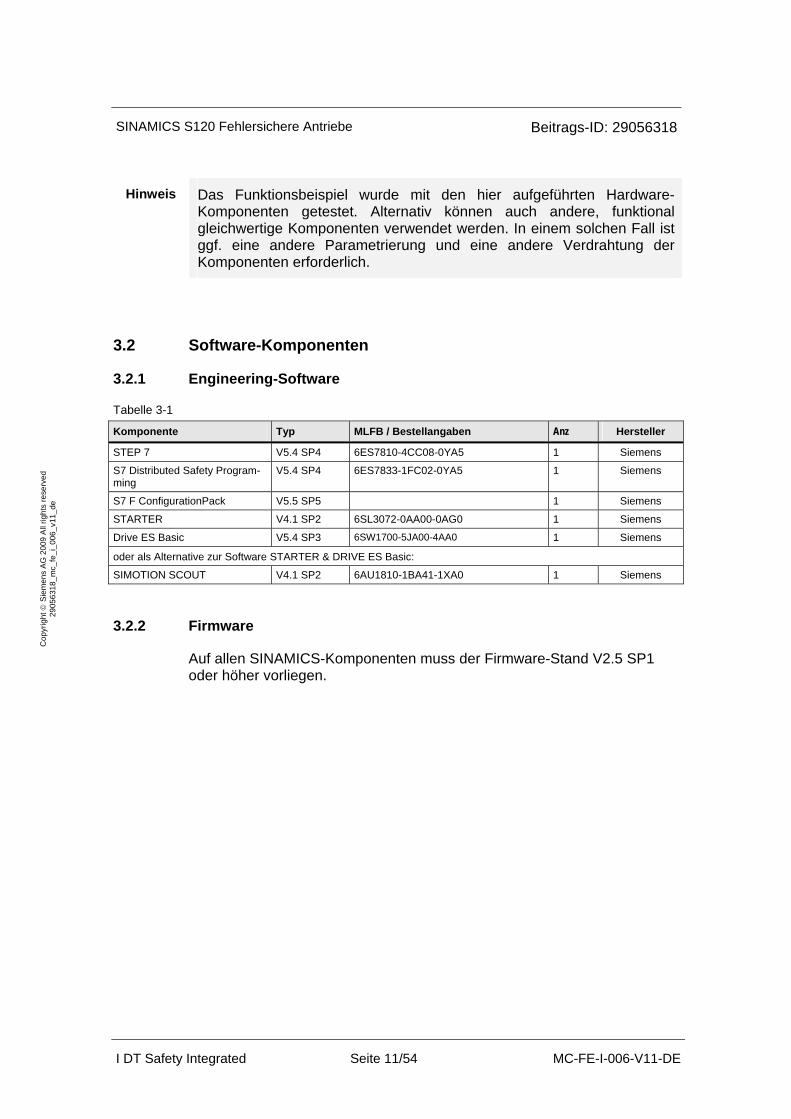
3.2 Software-Komponenten
3.2.1 Engineering-Software
Tabelle 3-1
Komponente Typ MLFB / Bestellangaben Anz Hersteller
STEP 7 V5.4 SP4 6ES7810-4CC08-0YA5 1 Siemens
S7 Distributed Safety Program-ming
V5.4 SP4 6ES7833-1FC02-0YA5 1 Siemens
S7 F ConfigurationPack V5.5 SP5 1 Siemens
STARTER V4.1 SP2 6SL3072-0AA00-0AG0 1 Siemens
Drive ES Basic V5.4 SP3 6SW1700-5JA00-4AA0 1 Siemens oder als Alternative zur Software STARTER & DRIVE ES Basic:
SIMOTION SCOUT V4.1 SP2 6AU1810-1BA41-1XA0 1 Siemens
3.2.2 Firmware
Auf allen SINAMICS-Komponenten muss der Firmware-Stand V2.5 SP1 oder höher vorliegen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
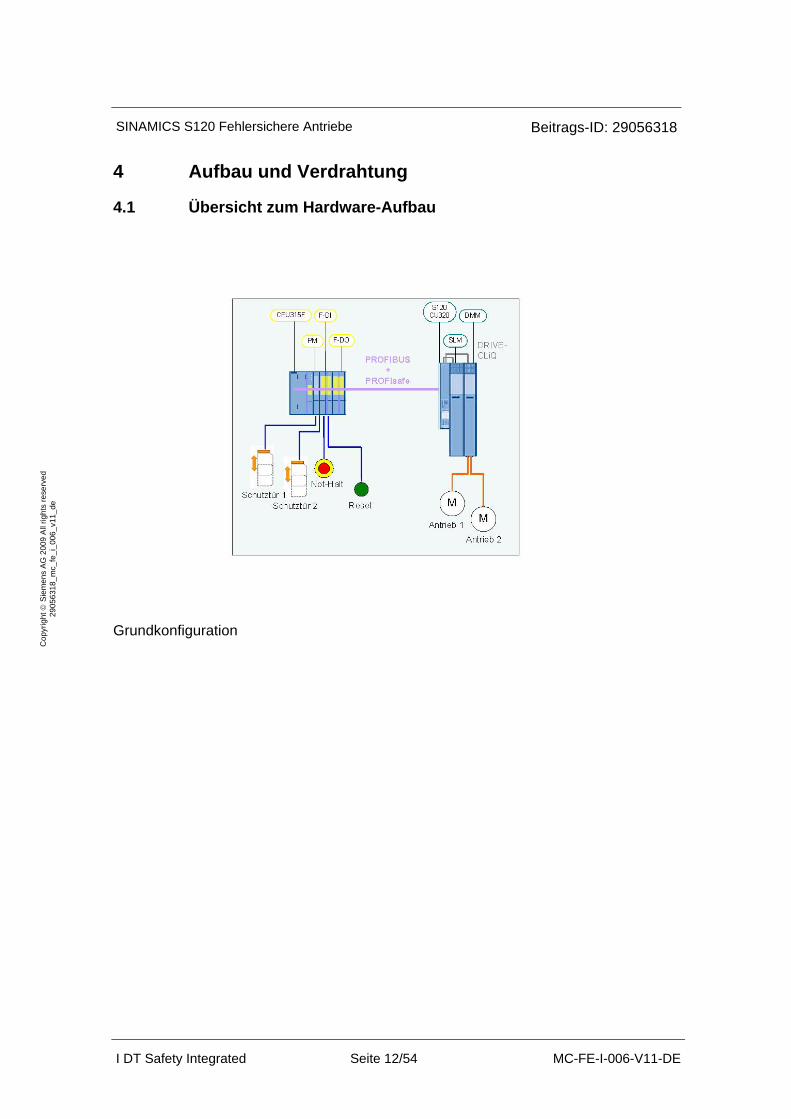
4 Aufbau und Verdrahtung
4.1 Übersicht zum Hardware-Aufbau
I DT Safety Integrated Seite 12/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Grundkonfiguration
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
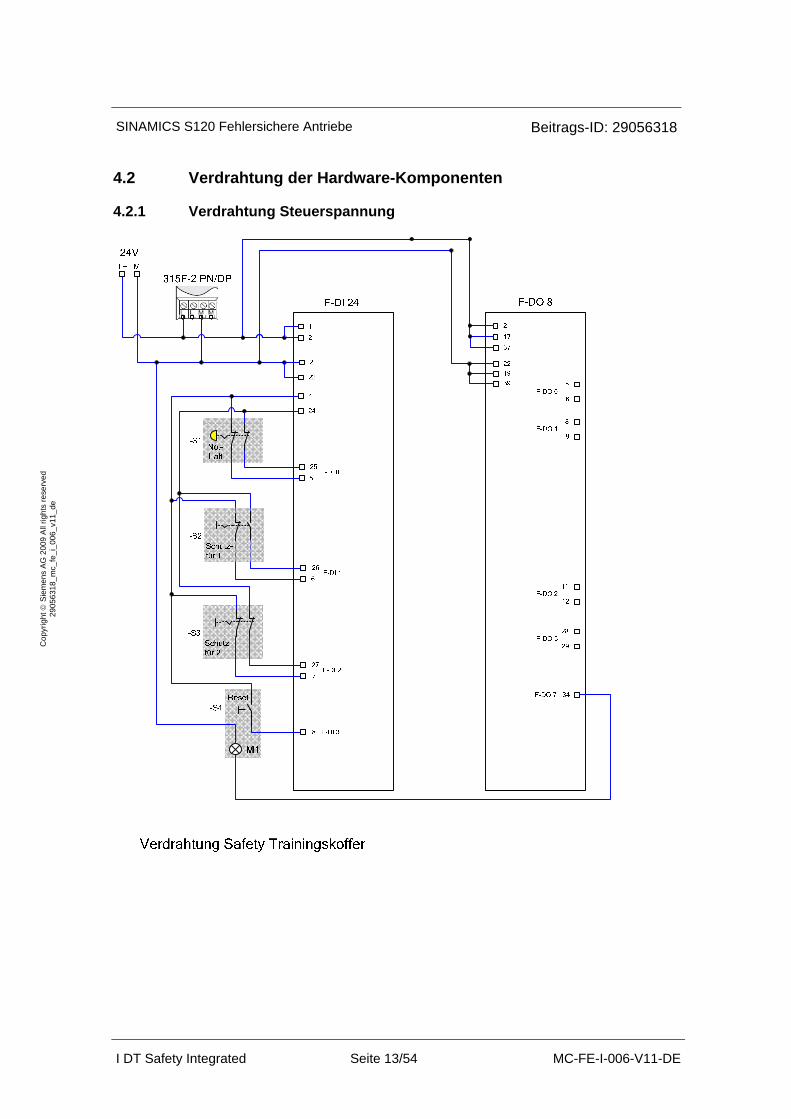
4.2 Verdrahtung der Hardware-Komponenten
4.2.1 Verdrahtung Steuerspannung
I DT Safety Integrated Seite 13/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
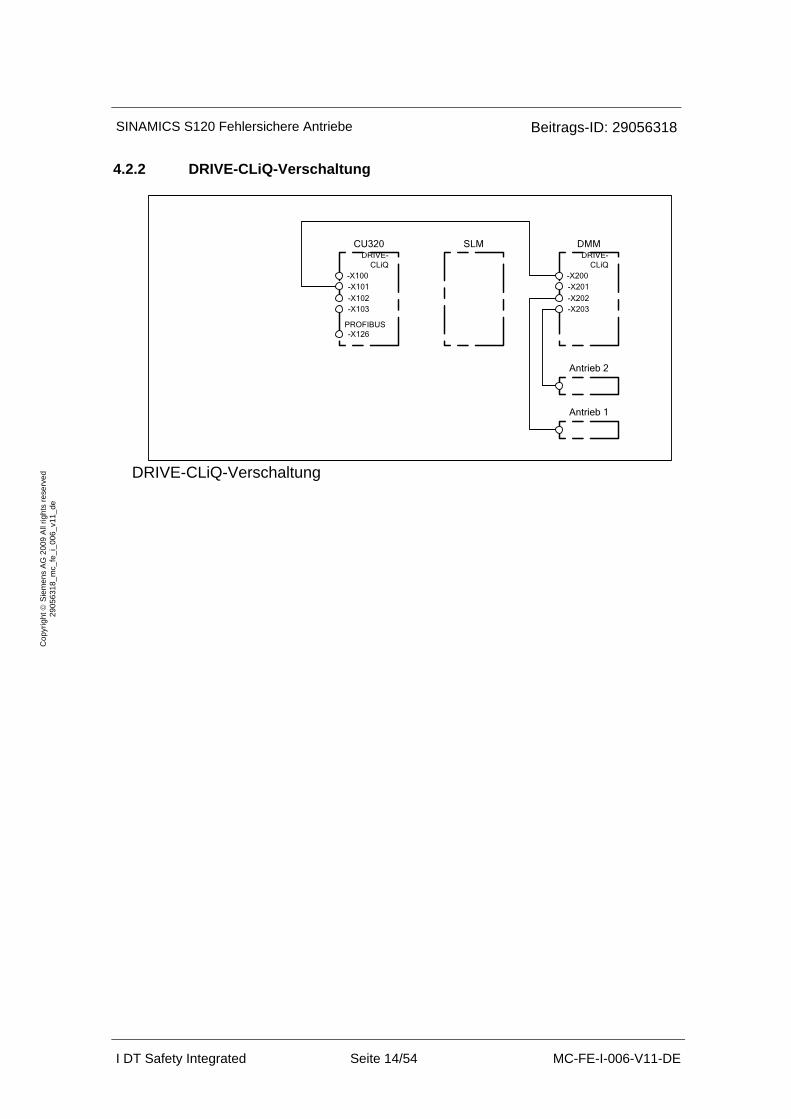
4.2.2 DRIVE-CLiQ-Verschaltung
I DT Safety Integrated Seite 14/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
CU320DRIVE-
CLiQ-X100-X101
-X102-X103
PROFIBUS
SLM
-X126
DMMDRIVE-
CLiQ-X200-X201
-X202-X203
Antrieb 2
Antrieb 1
DRIVE-CLiQ-Verschaltung
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
4.3 Wichtige Einstellungen an den Hardware-Komponenten
Die PROFIBUS-Schnittstellen der F-CPU und SINAMICS S120 werden in diesem Funktionsbeispiel für die Programmierung und den Austausch der PROFIdrive-Daten sowie der fehlersicheren Signale benutzt.
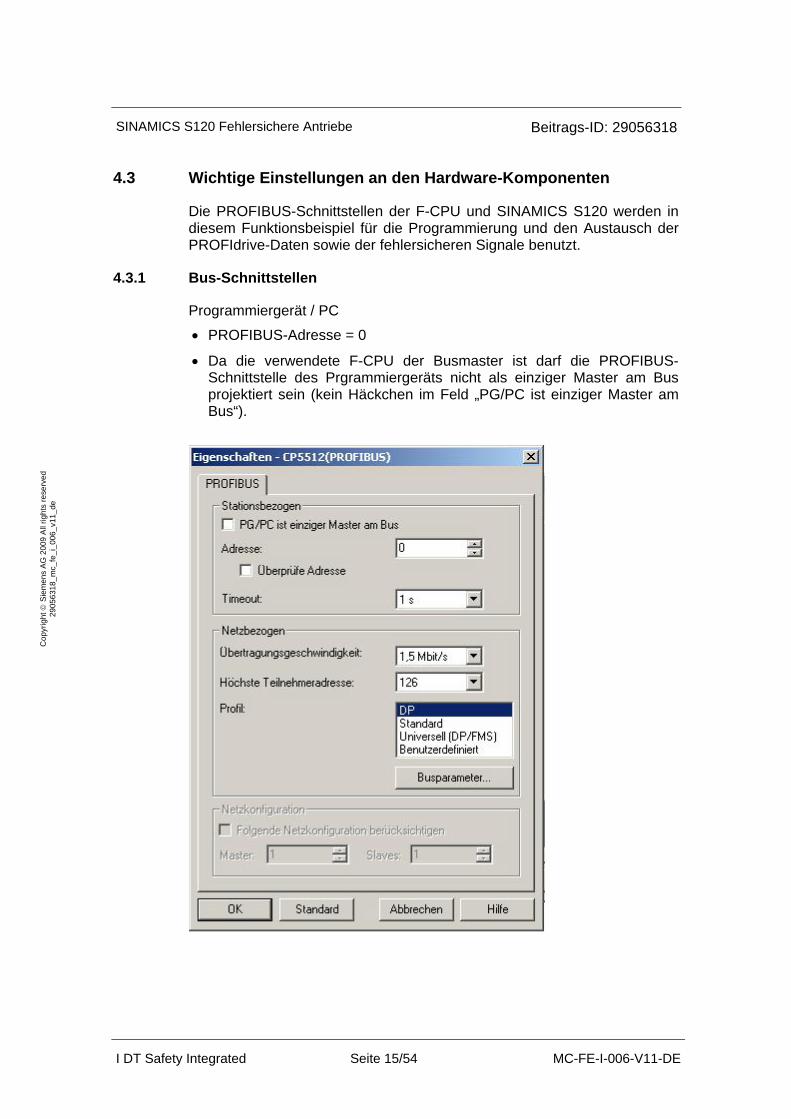
4.3.1 Bus-Schnittstellen
Programmiergerät / PC
I DT Safety Integrated Seite 15/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
• PROFIBUS-Adresse = 0
• Da die verwendete F-CPU der Busmaster ist darf die PROFIBUS-Schnittstelle des Prgrammiergeräts nicht als einziger Master am Bus projektiert sein (kein Häckchen im Feld „PG/PC ist einziger Master am Bus“).
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
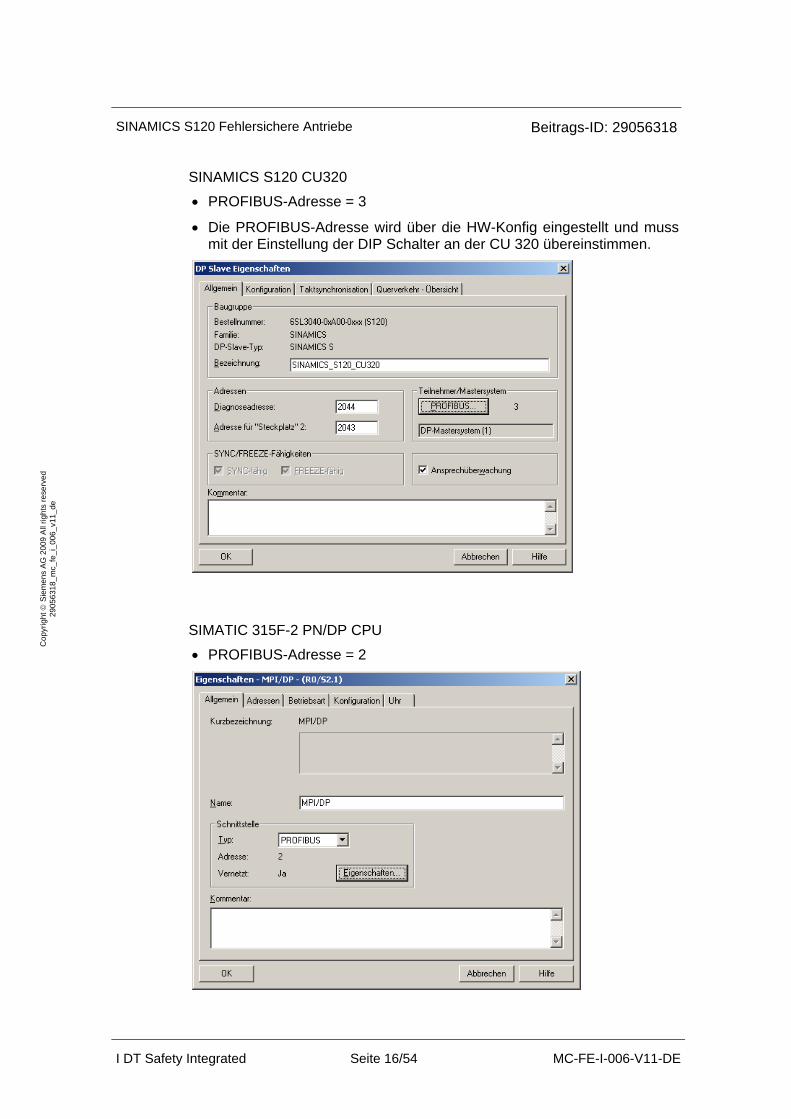
SINAMICS S120 CU320
• PROFIBUS-Adresse = 3
• Die PROFIBUS-Adresse wird über die HW-Konfig eingestellt und muss mit der Einstellung der DIP Schalter an der CU 320 übereinstimmen.
I DT Safety Integrated Seite 16/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
SIMATIC 315F-2 PN/DP CPU
• PROFIBUS-Adresse = 2
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 17/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
4.3.2 Voraussetzungen zum Betrieb
• Die SIMATIC-Komponenten sind montiert und miteinander verbunden. Die PROFIsafe-Adressen der fehlersicheren Ein- und Ausgangsbau-gruppen müssen per DIL-Schalter eingestellt sein; siehe dazu Kap. 6.2Hardware-Konfiguration der fehlersicheren Steuerung
• Alle Komponenten sind entsprechend Kapitel 4.2 Verdrahtung der Hardware-Komponenten angeschlossen.
• Die DRIVE-CLiQ-Topologie der SINAMICS-Komponenten ist eingehal-ten.
• Die Motoren sind per Leistungs- und Geberleitung mit dem Motor Modu-le verbunden.
• Das Motor Module ist ordnungsgemäß mit der Einspeisung verbunden (DC-Zwischenkreis und Steuerspannung DC 24 V).
• Die Einspeisung ist an das speisende Netz angeschlossen.
• Die Komponenten werden mit DC 24 V versorgt.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 18/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
5 Übersicht und Bedienung
5.1 Beschreibung der Bedienung
Hardware-Übersicht
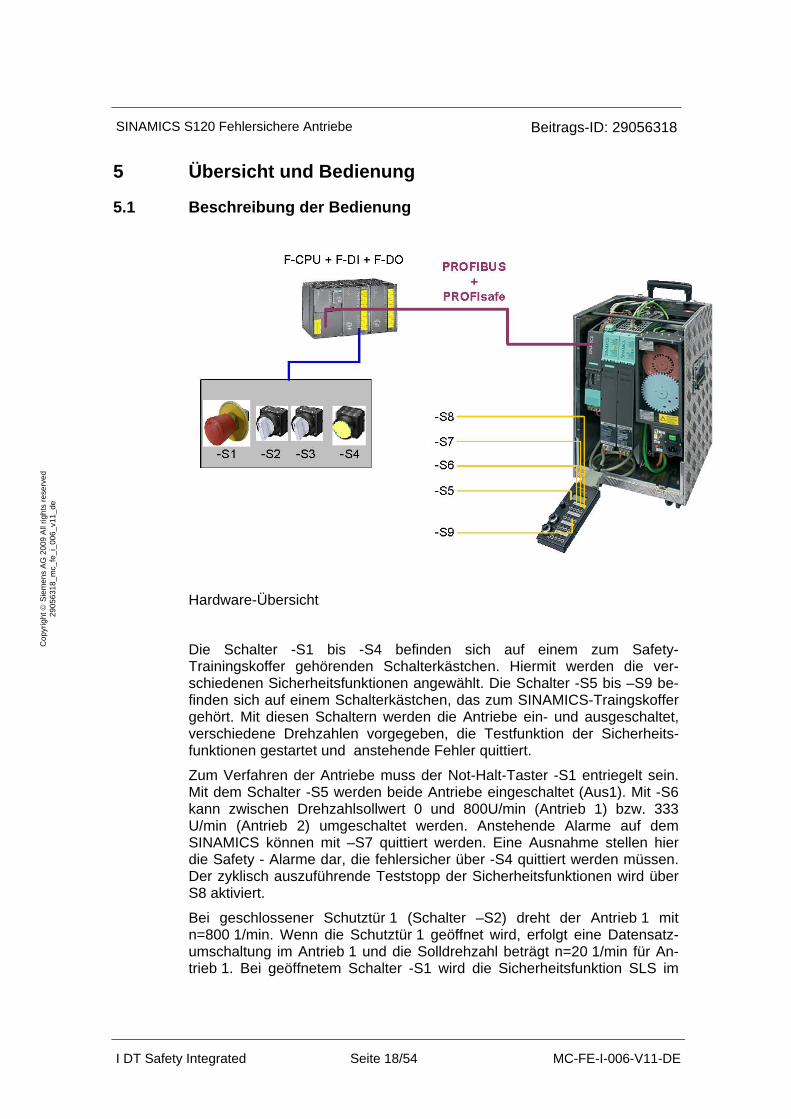
Die Schalter -S1 bis -S4 befinden sich auf einem zum Safety-Trainingskoffer gehörenden Schalterkästchen. Hiermit werden die ver-schiedenen Sicherheitsfunktionen angewählt. Die Schalter -S5 bis –S9 be-finden sich auf einem Schalterkästchen, das zum SINAMICS-Traingskoffer gehört. Mit diesen Schaltern werden die Antriebe ein- und ausgeschaltet, verschiedene Drehzahlen vorgegeben, die Testfunktion der Sicherheits-funktionen gestartet und anstehende Fehler quittiert.
Zum Verfahren der Antriebe muss der Not-Halt-Taster -S1 entriegelt sein. Mit dem Schalter -S5 werden beide Antriebe eingeschaltet (Aus1). Mit -S6 kann zwischen Drehzahlsollwert 0 und 800U/min (Antrieb 1) bzw. 333 U/min (Antrieb 2) umgeschaltet werden. Anstehende Alarme auf dem SINAMICS können mit –S7 quittiert werden. Eine Ausnahme stellen hier die Safety - Alarme dar, die fehlersicher über -S4 quittiert werden müssen. Der zyklisch auszuführende Teststopp der Sicherheitsfunktionen wird über S8 aktiviert.
Bei geschlossener Schutztür 1 (Schalter –S2) dreht der Antrieb 1 mit n=800 1/min. Wenn die Schutztür 1 geöffnet wird, erfolgt eine Datensatz-umschaltung im Antrieb 1 und die Solldrehzahl beträgt n=20 1/min für An-trieb 1. Bei geöffnetem Schalter -S1 wird die Sicherheitsfunktion SLS im
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 19/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Antrieb 1 aktiviert. Durch Schließen der Schutztür 1 wird wieder die Dreh-zahl n=800 1/min vorgegeben. Antrieb 2 wird nicht beeinflusst.
Eine geschlossene Schutztür 2 (Schalter –S3) bewirkt eine Solldrehzahl-vergabe n=333 1/min für Antrieb 2. Wird die Schutztür 2 geöffnet, wird An-trieb 2 per Datensatzumschaltung mit n=33 1/min beaufschlagt. Bei geöff-netem Schalter –S2 wird die Sicherheitsfunktion SLS im Antrieb 2 aktiviert. Durch Schließen der Schutztür 2 wird wieder die Drehzahl n=333 1/min vorgegeben. Auch hier wird Antrieb 1 nicht beeinflusst.
Mit Betätigen von Taster –S9 werden die Antriebe unabhängig von der Schutztürstellung mit einem höheren Sollwert beaufschlagt. Dieser beträgt bei Antrieb 1 n=1000 1/min und bei Antrieb 2 n=666 1/min. Bei geöffneter Schutztür kommt es zu einer SLS-Grenzwertverletzung und der betroffene Antrieb wird mit internem SS2 (Stop C) stillgesetzt und bei n=0 1/min in SOS geschaltet. Zum weiteren Verfahren muss die durch den internen SS2 (Stop C) ausgelöste Reaktion über den Reset-Taster –S4 quittiert werden.
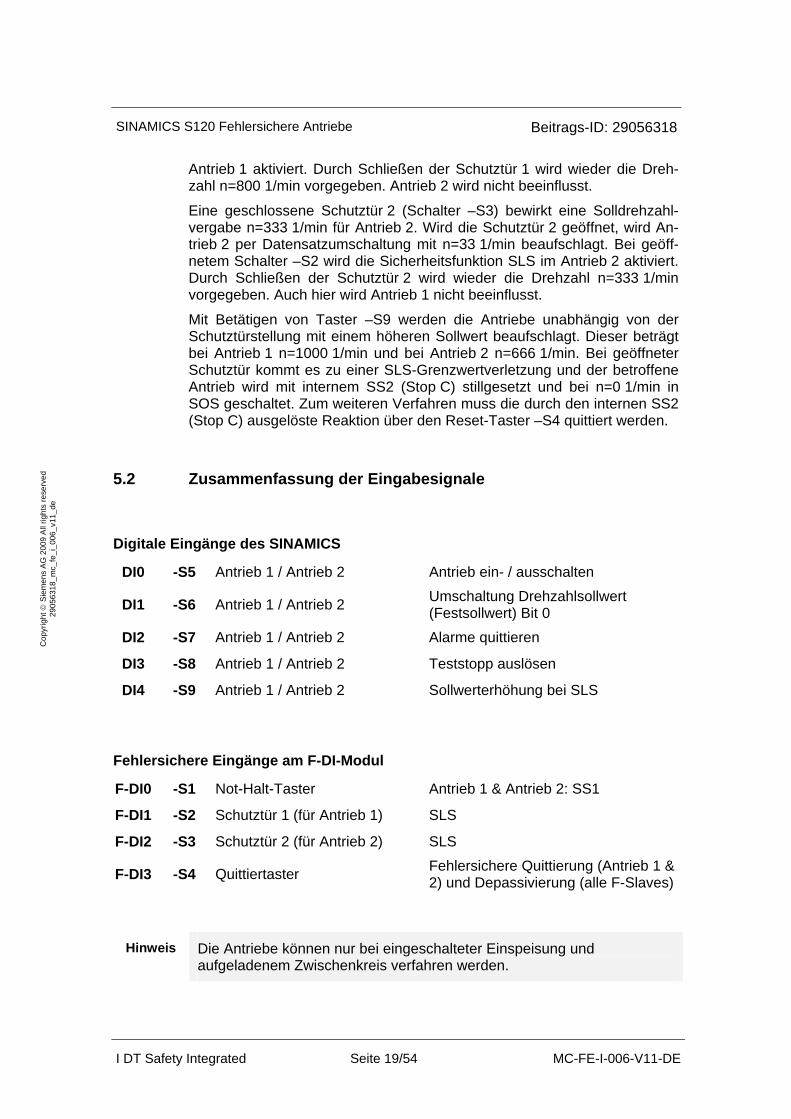
5.2 Zusammenfassung der Eingabesignale
Digitale Eingänge des SINAMICS
DI0 -S5 Antrieb 1 / Antrieb 2 Antrieb ein- / ausschalten
DI1 -S6 Antrieb 1 / Antrieb 2 Umschaltung Drehzahlsollwert (Festsollwert) Bit 0
DI2 -S7 Antrieb 1 / Antrieb 2 Alarme quittieren
DI3 -S8 Antrieb 1 / Antrieb 2 Teststopp auslösen
DI4 -S9 Antrieb 1 / Antrieb 2 Sollwerterhöhung bei SLS
Fehlersichere Eingänge am F-DI-Modul
F-DI0 -S1 Not-Halt-Taster Antrieb 1 & Antrieb 2: SS1
F-DI1 -S2 Schutztür 1 (für Antrieb 1) SLS
F-DI2 -S3 Schutztür 2 (für Antrieb 2) SLS
F-DI3 -S4 Quittiertaster Fehlersichere Quittierung (Antrieb 1 & 2) und Depassivierung (alle F-Slaves)
Hinweis Die Antriebe können nur bei eingeschalteter Einspeisung und aufgeladenem Zwischenkreis verfahren werden.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 20/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
6 Beispielprojekt
In diesem Kapitel erfahren Sie, wie die einzelnen Komponenten paramet-riert werden müssen. Als Engineering-Software für den SINAMICS S120 können sowohl STARTER und DRIVE ES Basic, als auch SIMOTION SCOUT eingesetzt werden.
Zur Erstellung dieses Beispieles wurde SIMOTION SCOUT verwendet. Für die Programmierung der F-CPU ist STEP 7 und Distributed Safety Voraus-setzung.
Nachfolgend wird beschrieben, wie das zu diesem Funktionsbeispiel gehö-rende Software-Projekt eingerichtet wurde.
6.1 Passwörter
Der Einfachheit halber wird im Projekt auf den SIMATIC-Komponenten ein gemeinsames Sicherheits-Passwort für Programm und Hardware verwen-det. Auch bei der Safety-Projektierung der SINAMICS-Komponenten wird für die Antriebe ein gemeinsames Passwort benutzt.
• Sicherheitspasswort auf F-CPU: "0"
• Sicherheitspasswort auf SINAMICS: "1" In einer realen Applikation sollten diese Passwörter geändert werden!

SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
6.2 Hardware-Konfiguration der fehlersicheren Steuerung
I DT Safety Integrated Seite 21/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Beschreibung Anmerkung
Im SIMATIC-Manager eine SIMATIC 300-Station in das Projekt einfügen.
In der HW-Konfig die Station vollständig an-legen und parametrie-ren. Dazu die in der Stück-liste aus Kap. 3.1 Hardware-Komponenten enthal-tenen Baugruppen per Drag&Drop aus dem Katalogfenster in das Konfigurationsfenster ziehen. Adresseinstellungen der DP-Schnittstelle wie in Kap. 4.3 be-schrieben vornehmen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 22/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
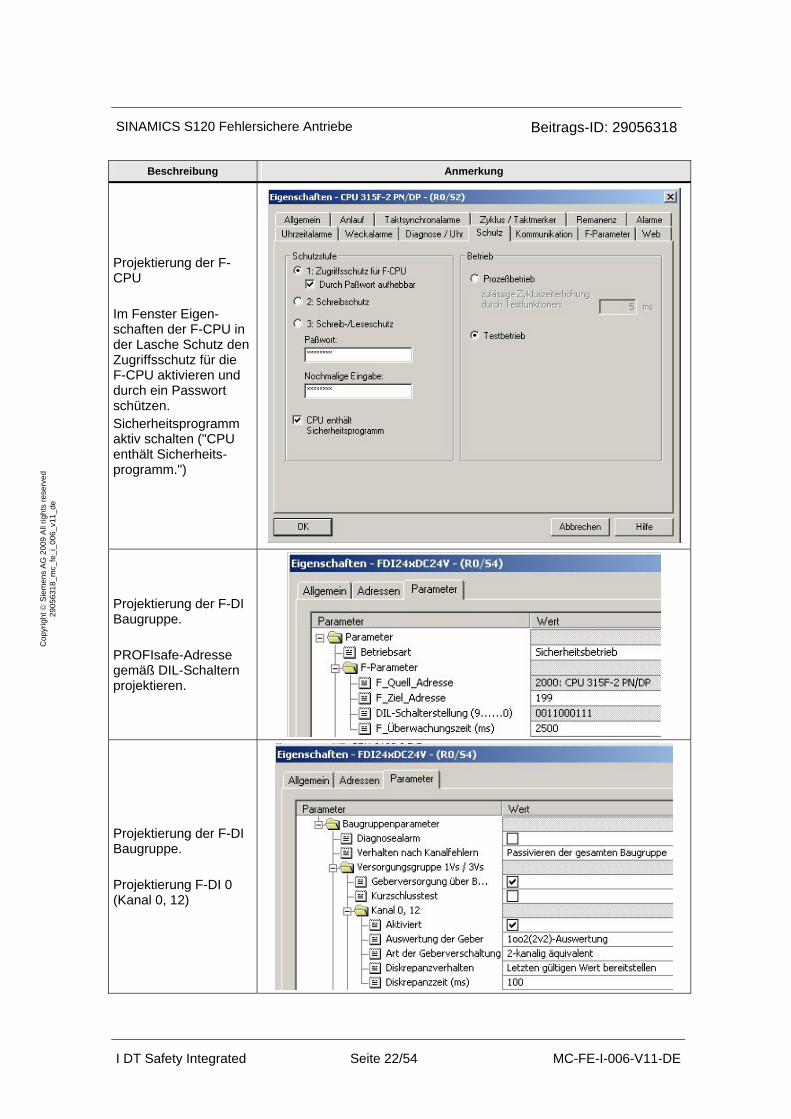
Projektierung der F-CPU Im Fenster Eigen-schaften der F-CPU in der Lasche Schutz den Zugriffsschutz für die F-CPU aktivieren und durch ein Passwort schützen. Sicherheitsprogramm aktiv schalten ("CPU enthält Sicherheits-programm.")
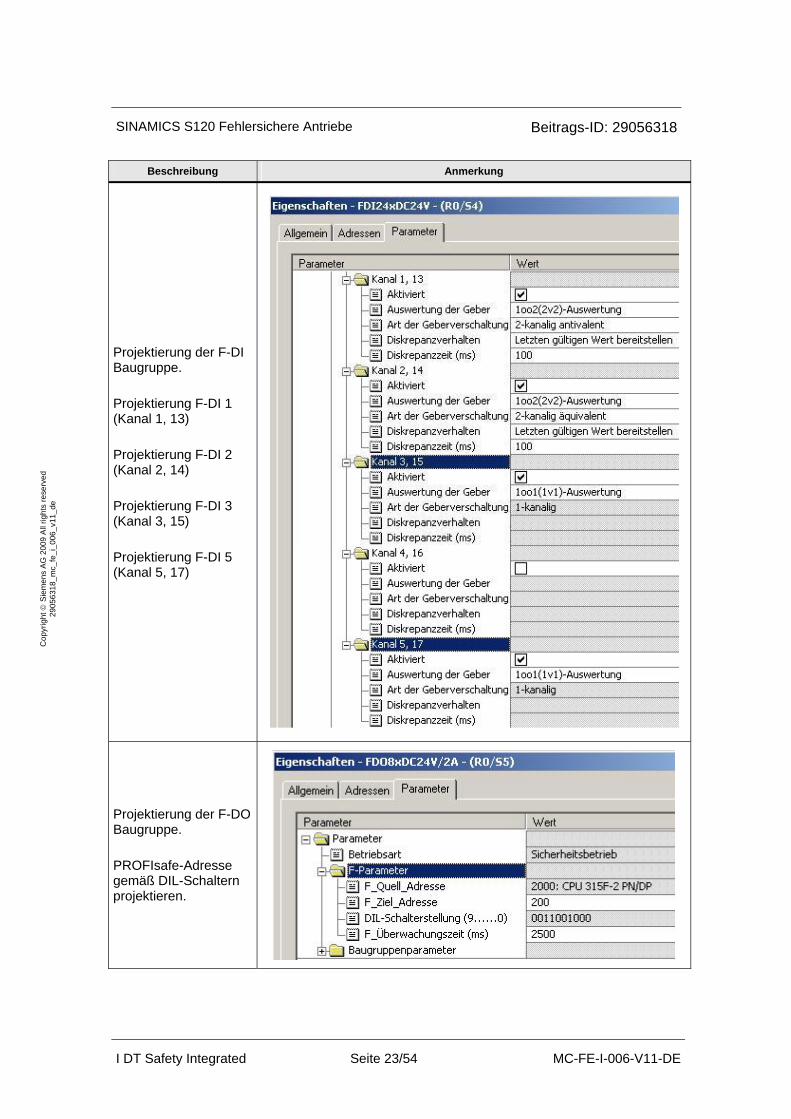
Projektierung der F-DI Baugruppe. PROFIsafe-Adresse gemäß DIL-Schaltern projektieren.
Projektierung der F-DI Baugruppe. Projektierung F-DI 0 (Kanal 0, 12)
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 23/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Projektierung der F-DI Baugruppe. Projektierung F-DI 1 (Kanal 1, 13) Projektierung F-DI 2 (Kanal 2, 14) Projektierung F-DI 3 (Kanal 3, 15) Projektierung F-DI 5 (Kanal 5, 17)
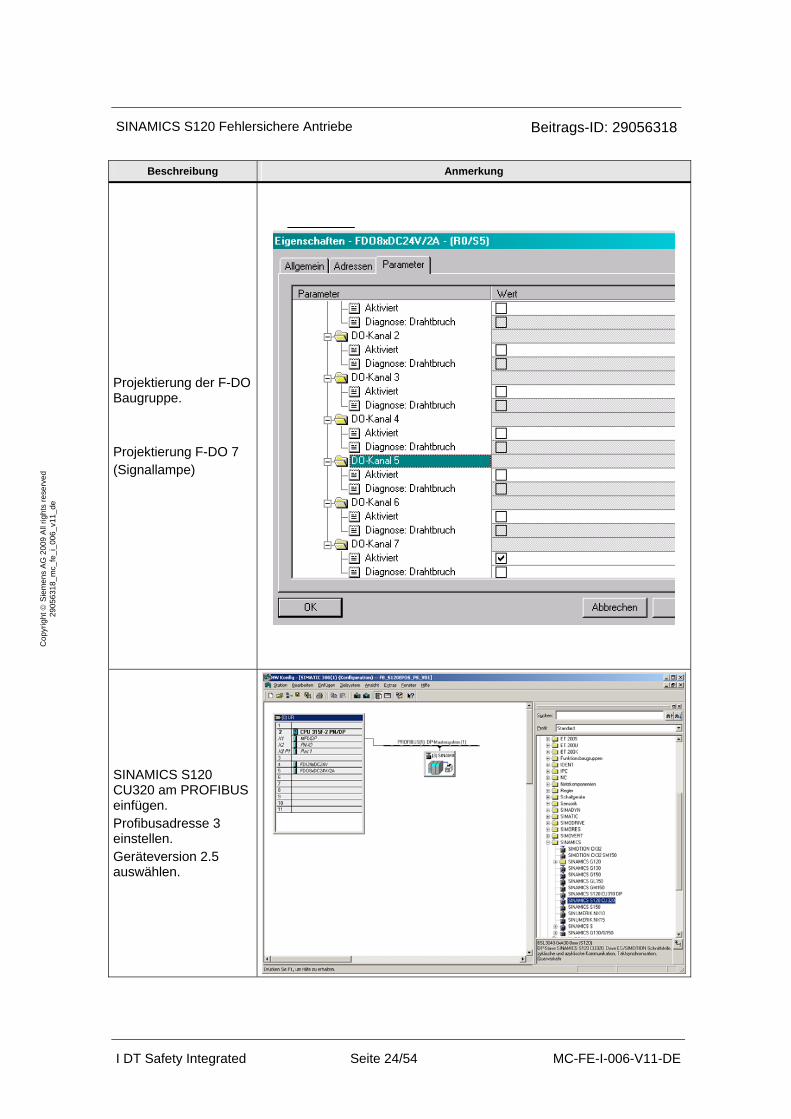
Projektierung der F-DO Baugruppe. PROFIsafe-Adresse gemäß DIL-Schaltern projektieren.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 24/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Projektierung der F-DO Baugruppe. Projektierung F-DO 7 (Signallampe)
SINAMICS S120 CU320 am PROFIBUS einfügen. Profibusadresse 3 einstellen. Geräteversion 2.5 auswählen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
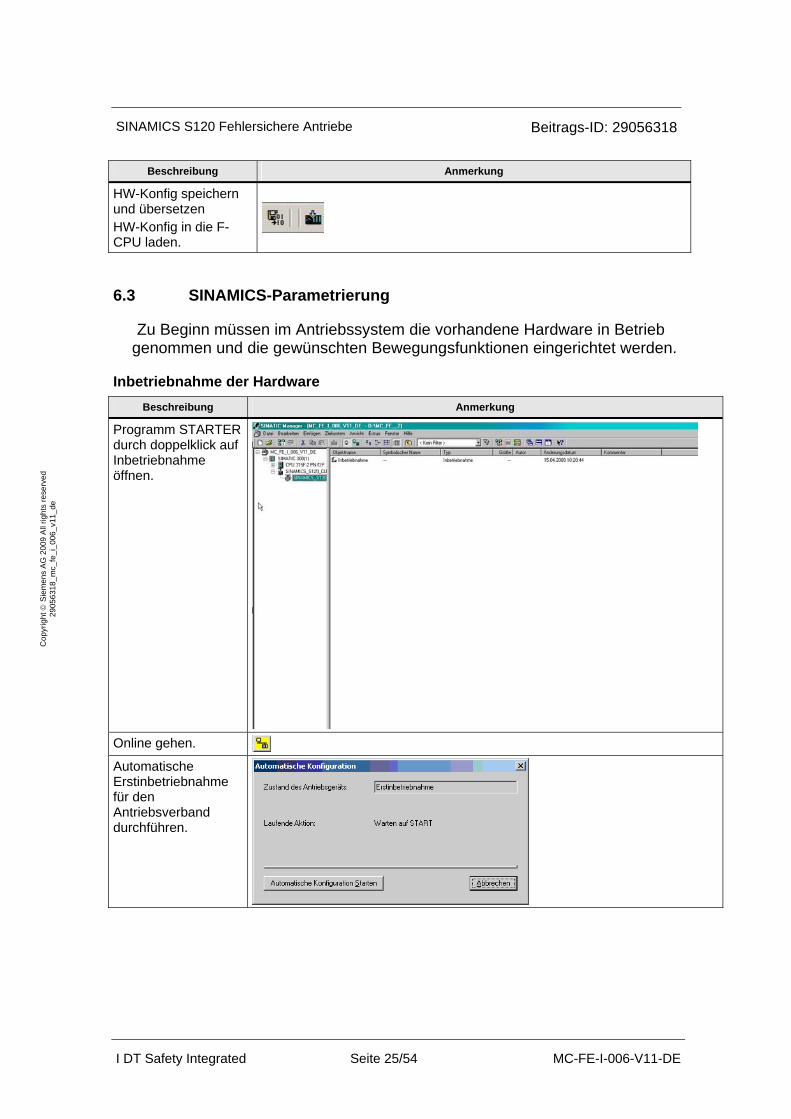
HW-Konfig speichern und übersetzen HW-Konfig in die F-CPU laden.
6.3 SINAMICS-Parametrierung
Zu Beginn müssen im Antriebssystem die vorhandene Hardware in Betrieb genommen und die gewünschten Bewegungsfunktionen eingerichtet werden.
Inbetriebnahme der Hardware
I DT Safety Integrated Seite 25/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Beschreibung Anmerkung
Programm STARTER durch doppelklick auf Inbetriebnahme öffnen.
Online gehen.
Automatische Erstinbetriebnahme für den Antriebsverband durchführen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
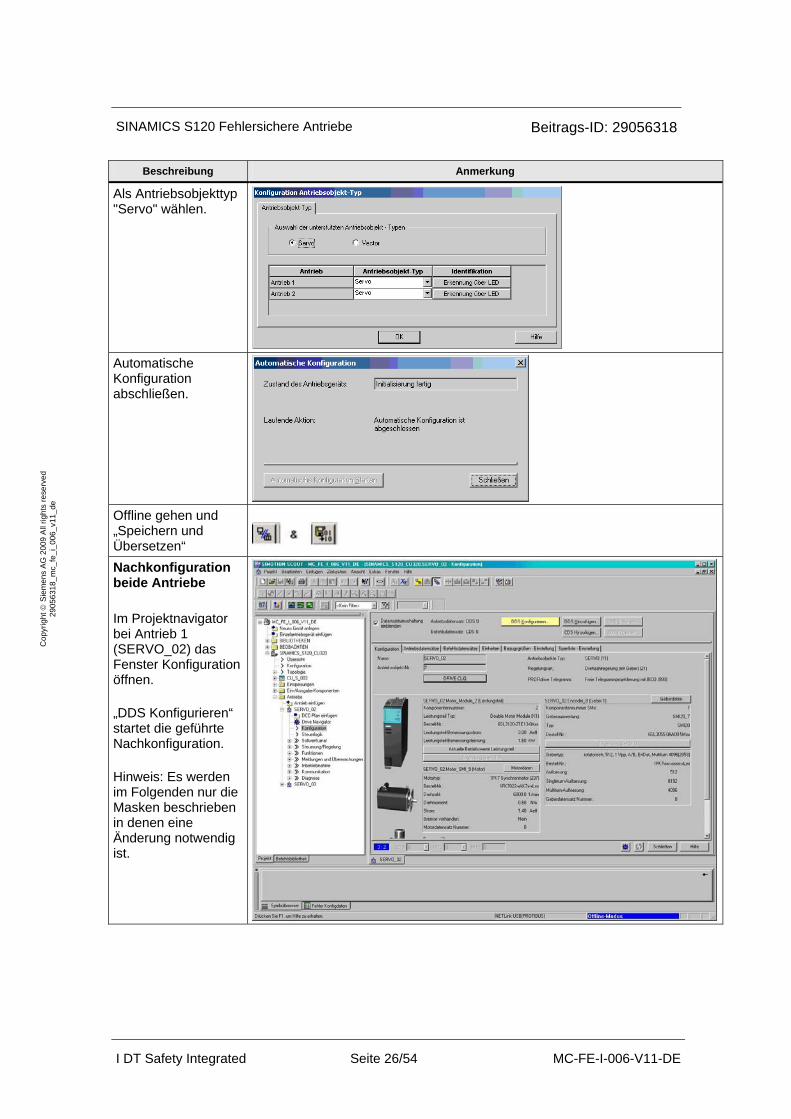
Als Antriebsobjekttyp "Servo" wählen.
Automatische Konfiguration abschließen.
I DT Safety Integrated Seite 26/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Offline gehen und „Speichern und Übersetzen“
Nachkonfiguration beide Antriebe Im Projektnavigator bei Antrieb 1 (SERVO_02) das Fenster Konfiguration öffnen. „DDS Konfigurieren“ startet die geführte Nachkonfiguration. Hinweis: Es werden im Folgenden nur die Masken beschrieben in denen eine Änderung notwendig ist.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 27/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Beschreibung Anmerkung
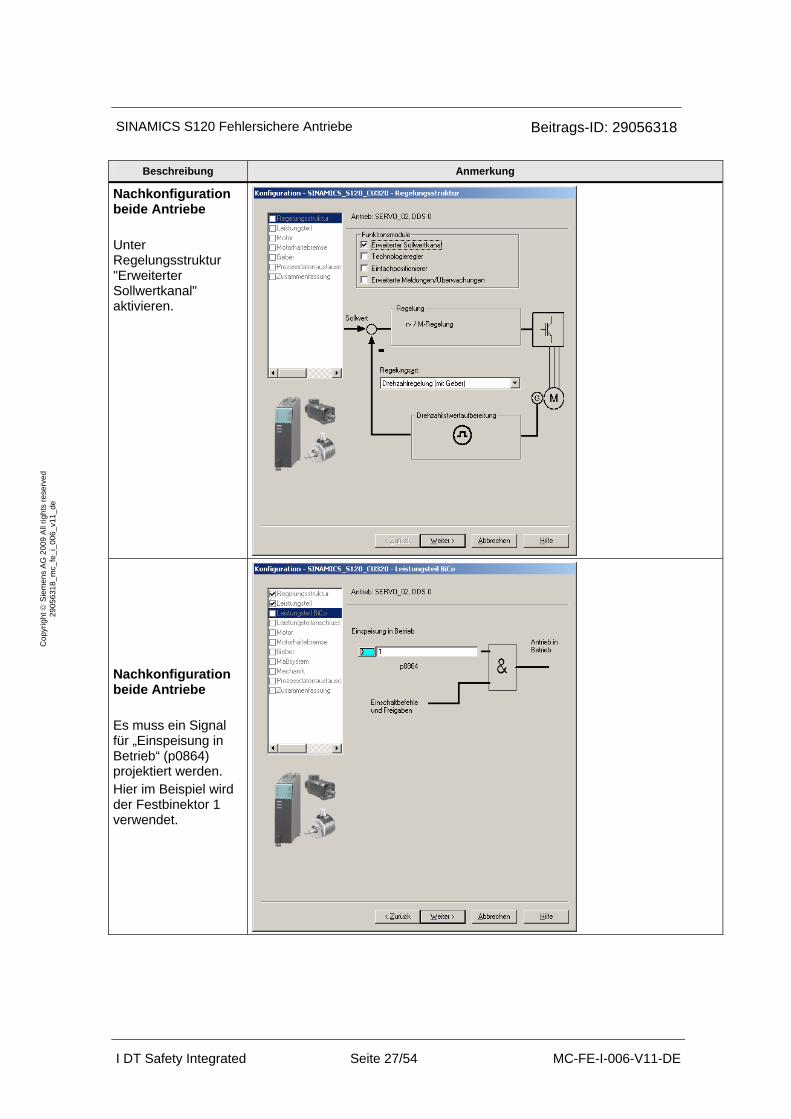
Nachkonfiguration beide Antriebe Unter Regelungsstruktur "Erweiterter Sollwertkanal" aktivieren.
Nachkonfiguration beide Antriebe Es muss ein Signal für „Einspeisung in Betrieb“ (p0864) projektiert werden. Hier im Beispiel wird der Festbinektor 1 verwendet.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
Nachkonfiguration Antrieb 2
I DT Safety Integrated Seite 28/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
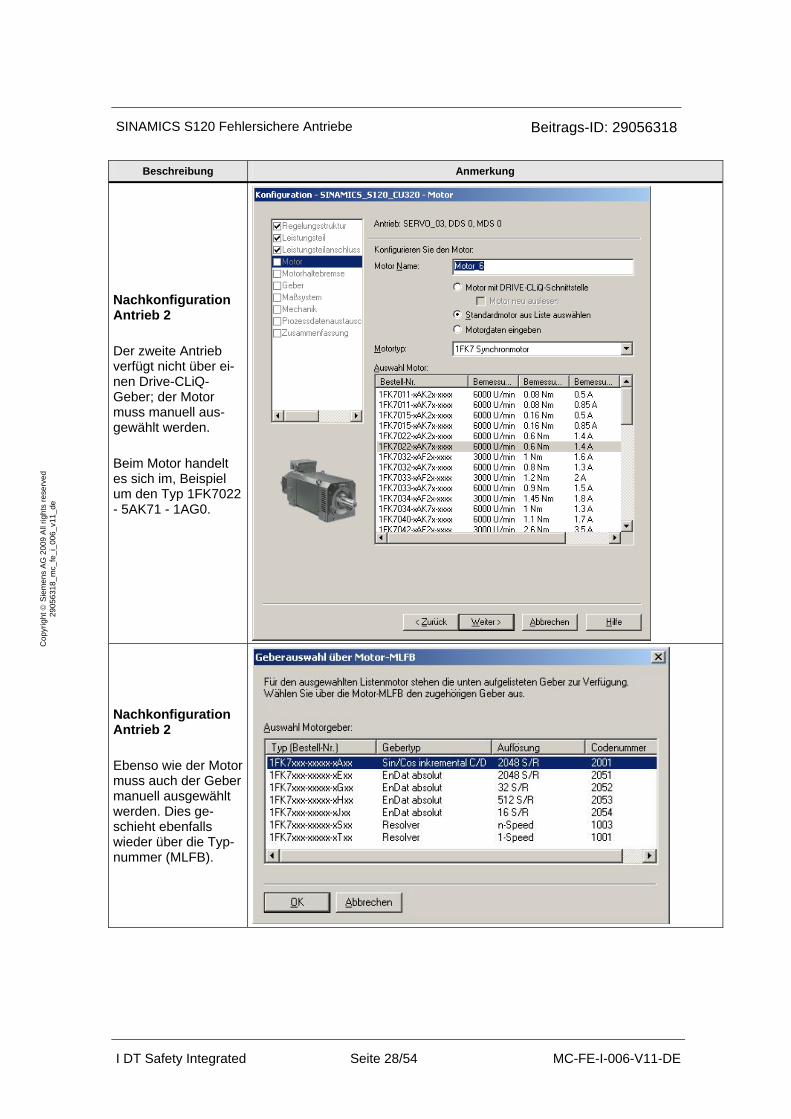
Der zweite Antrieb verfügt nicht über ei-nen Drive-CLiQ-Geber; der Motor muss manuell aus-gewählt werden. Beim Motor handelt es sich im, Beispiel um den Typ 1FK7022 - 5AK71 - 1AG0.
Nachkonfiguration Antrieb 2 Ebenso wie der Motor muss auch der Geber manuell ausgewählt werden. Dies ge-schieht ebenfalls wieder über die Typ-nummer (MLFB).
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung
I DT Safety Integrated Seite 29/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Anmerkung
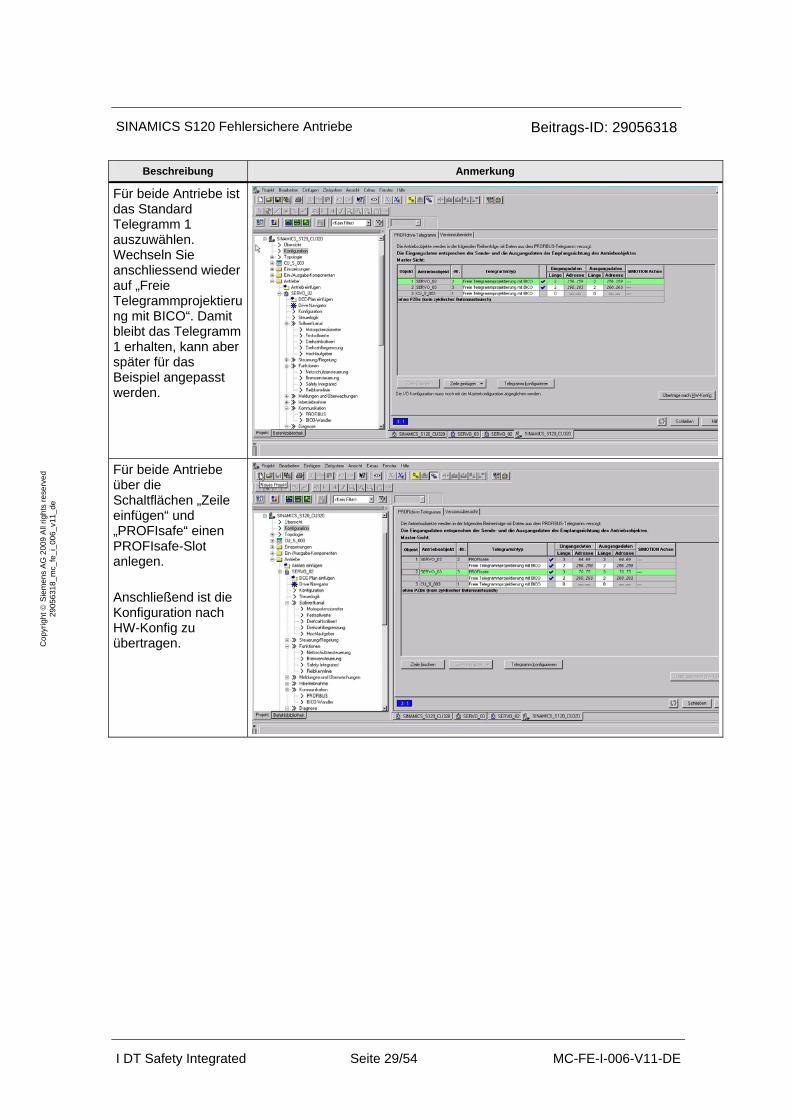
Für beide Antriebe ist das Standard Telegramm 1 auszuwählen. Wechseln Sie anschliessend wieder auf „Freie Telegrammprojektierung mit BICO“. Damit bleibt das Telegramm 1 erhalten, kann aber später für das Beispiel angepasst werden.
Für beide Antriebe über die Schaltflächen „Zeile einfügen“ und „PROFIsafe“ einen PROFIsafe-Slot anlegen. Anschließend ist die Konfiguration nach HW-Konfig zu übertragen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
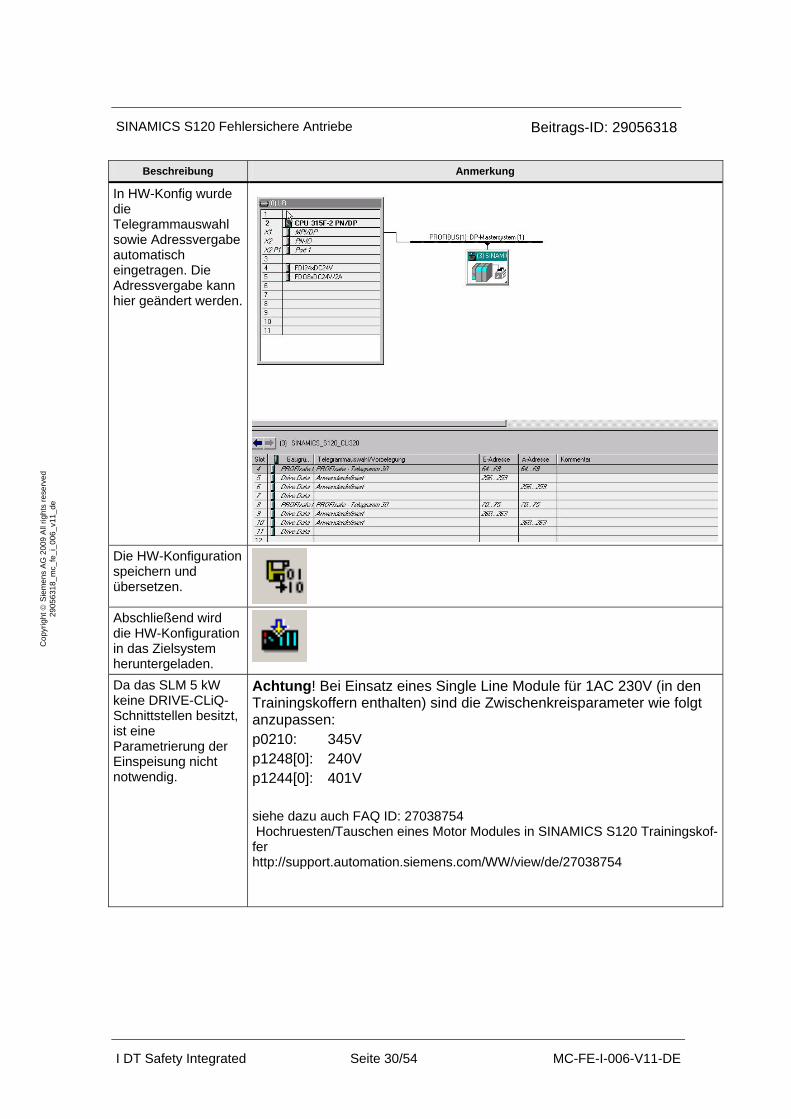
In HW-Konfig wurde die Telegrammauswahl sowie Adressvergabe automatisch eingetragen. Die Adressvergabe kann hier geändert werden.
I DT Safety Integrated Seite 30/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Die HW-Konfiguration speichern und übersetzen.
Abschließend wird die HW-Konfiguration in das Zielsystem heruntergeladen. Da das SLM 5 kW keine DRIVE-CLiQ-Schnittstellen besitzt, ist eine Parametrierung der Einspeisung nicht notwendig.
Achtung! Bei Einsatz eines Single Line Module für 1AC 230V (in den Trainingskoffern enthalten) sind die Zwischenkreisparameter wie folgt anzupassen: p0210: 345V p1248[0]: 240V p1244[0]: 401V siehe dazu auch FAQ ID: 27038754 Hochruesten/Tauschen eines Motor Modules in SINAMICS S120 Trainingskof-ferhttp://support.automation.siemens.com/WW/view/de/27038754
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
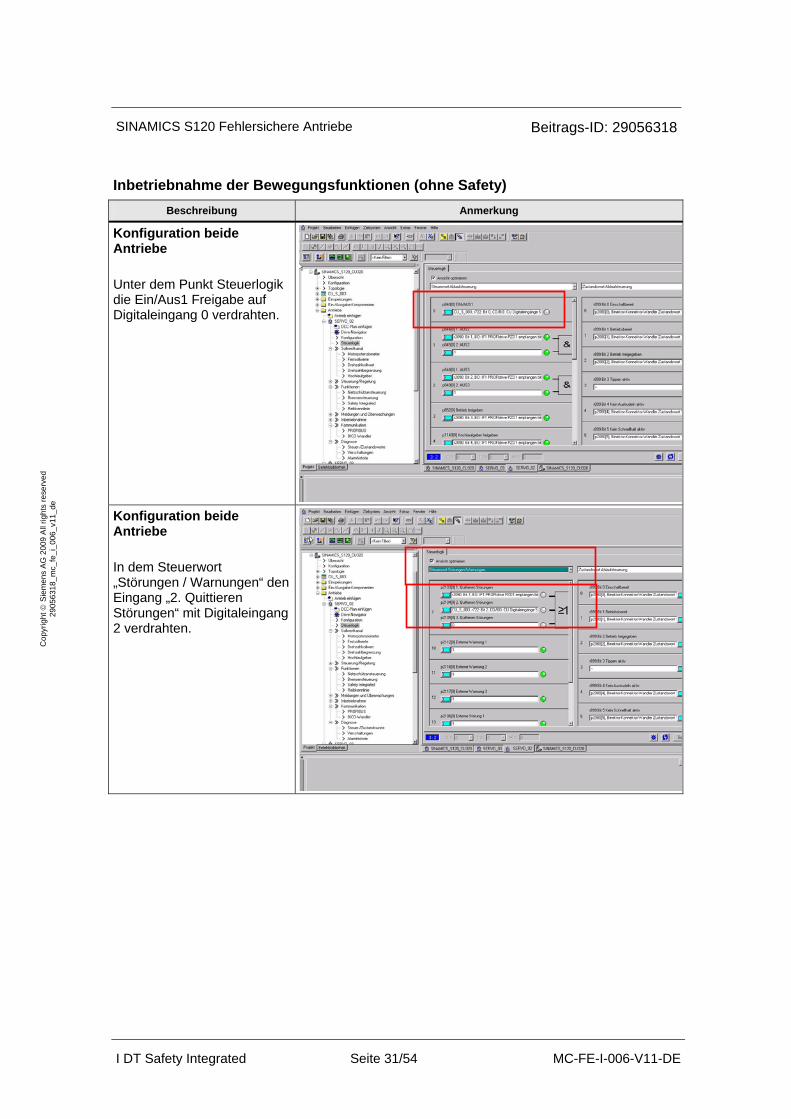
Inbetriebnahme der Bewegungsfunktionen (ohne Safety) Beschreibung Anmerkung
Konfiguration beide Antriebe Unter dem Punkt Steuerlogik die Ein/Aus1 Freigabe auf Digitaleingang 0 verdrahten.
I DT Safety Integrated Seite 31/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Konfiguration beide Antriebe In dem Steuerwort „Störungen / Warnungen“ den Eingang „2. Quittieren Störungen“ mit Digitaleingang 2 verdrahten.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 32/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
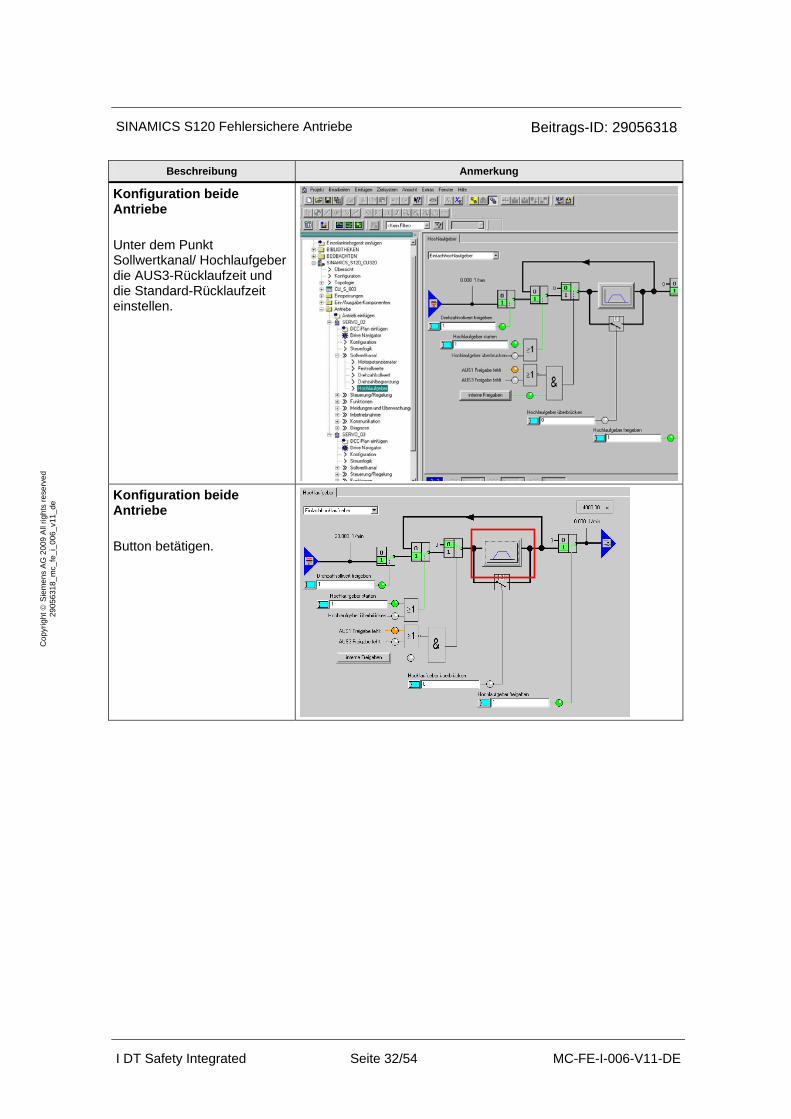
Konfiguration beide Antriebe Unter dem Punkt Sollwertkanal/ Hochlaufgeber die AUS3-Rücklaufzeit und die Standard-Rücklaufzeit einstellen.
Konfiguration beide Antriebe Button betätigen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 33/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
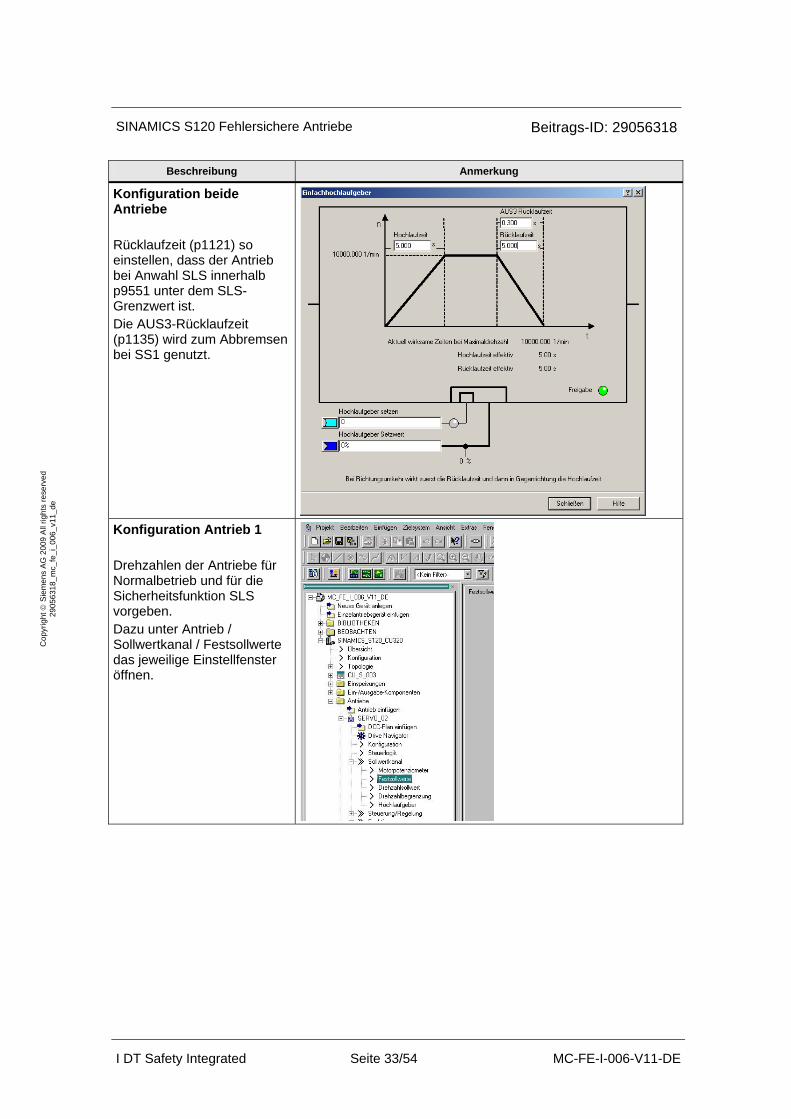
Konfiguration beide Antriebe Rücklaufzeit (p1121) so einstellen, dass der Antrieb bei Anwahl SLS innerhalb p9551 unter dem SLS-Grenzwert ist. Die AUS3-Rücklaufzeit (p1135) wird zum Abbremsen bei SS1 genutzt.
Konfiguration Antrieb 1 Drehzahlen der Antriebe für Normalbetrieb und für die Sicherheitsfunktion SLS vorgeben. Dazu unter Antrieb / Sollwertkanal / Festsollwerte das jeweilige Einstellfenster öffnen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
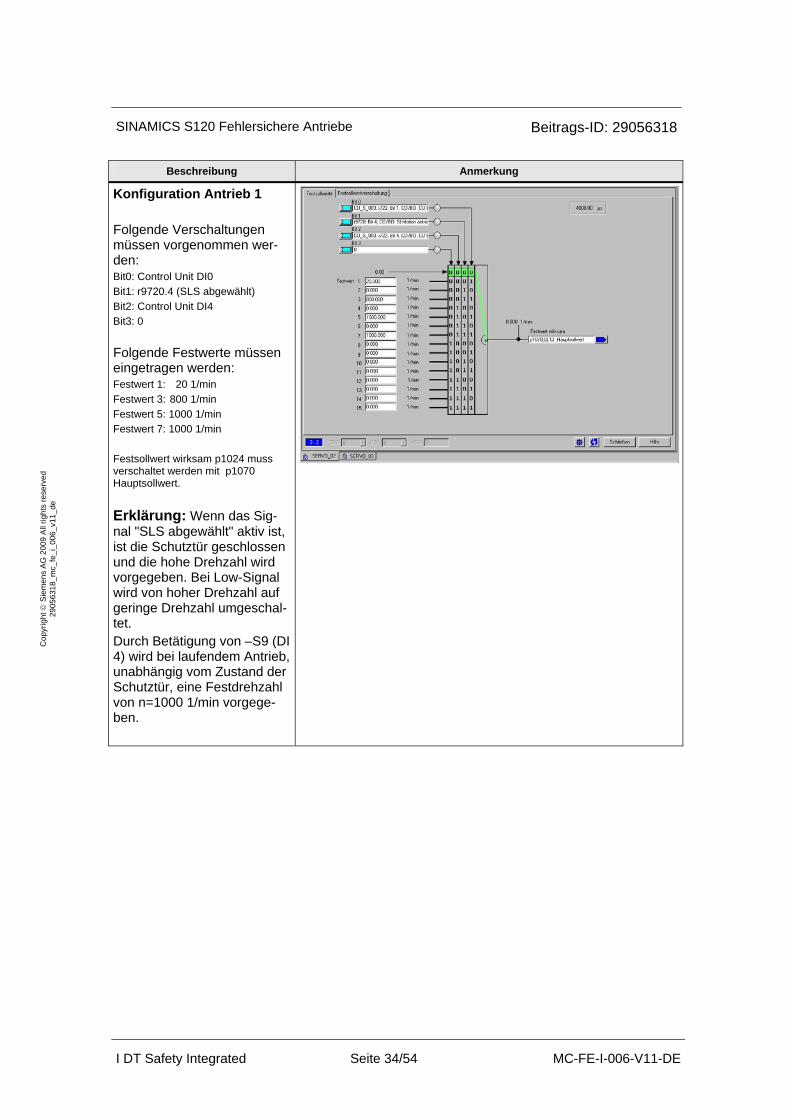
Konfiguration Antrieb 1 Folgende Verschaltungen müssen vorgenommen wer-den: Bit0: Control Unit DI0 Bit1: r9720.4 (SLS abgewählt) Bit2: Control Unit DI4 Bit3: 0 Folgende Festwerte müssen eingetragen werden: Festwert 1: 20 1/min Festwert 3: 800 1/min Festwert 5: 1000 1/min Festwert 7: 1000 1/min
I DT Safety Integrated Seite 34/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Festsollwert wirksam p1024 muss verschaltet werden mit p1070 Hauptsollwert.
Erklärung: Wenn das Sig-nal "SLS abgewählt" aktiv ist, ist die Schutztür geschlossen und die hohe Drehzahl wird vorgegeben. Bei Low-Signal wird von hoher Drehzahl auf geringe Drehzahl umgeschal-tet. Durch Betätigung von –S9 (DI 4) wird bei laufendem Antrieb, unabhängig vom Zustand der Schutztür, eine Festdrehzahl von n=1000 1/min vorgege-ben.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 35/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
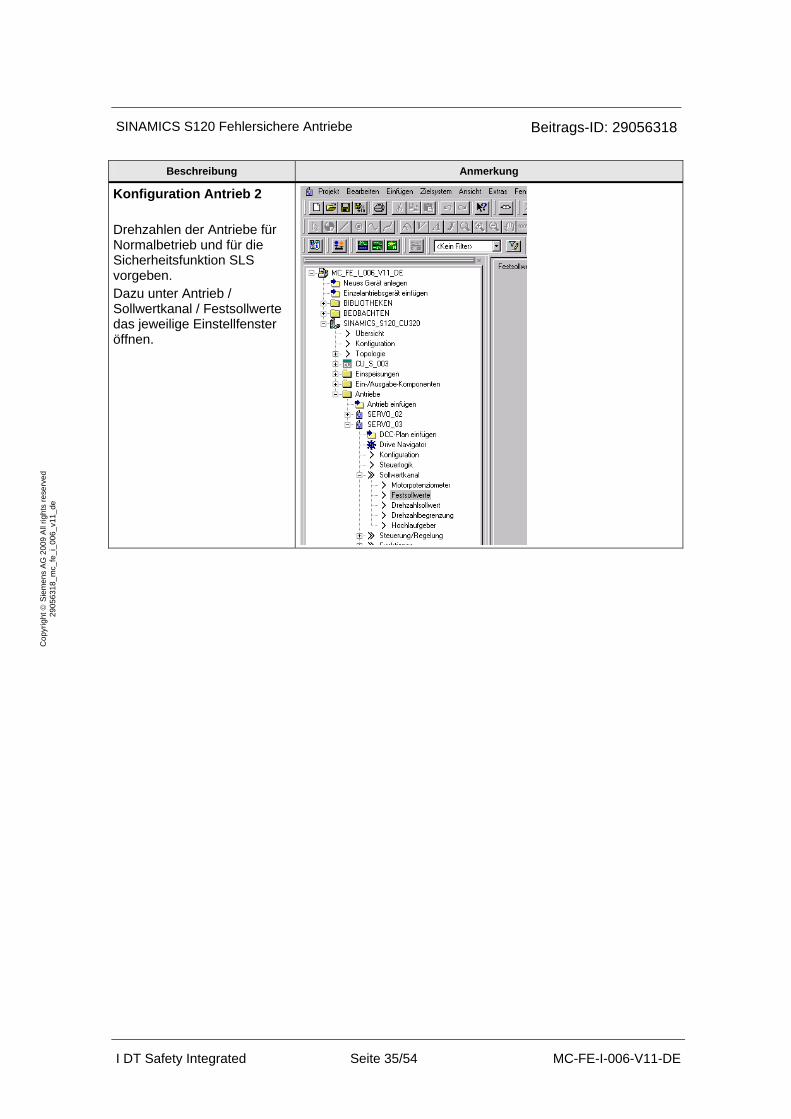
Konfiguration Antrieb 2 Drehzahlen der Antriebe für Normalbetrieb und für die Sicherheitsfunktion SLS vorgeben. Dazu unter Antrieb / Sollwertkanal / Festsollwerte das jeweilige Einstellfenster öffnen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
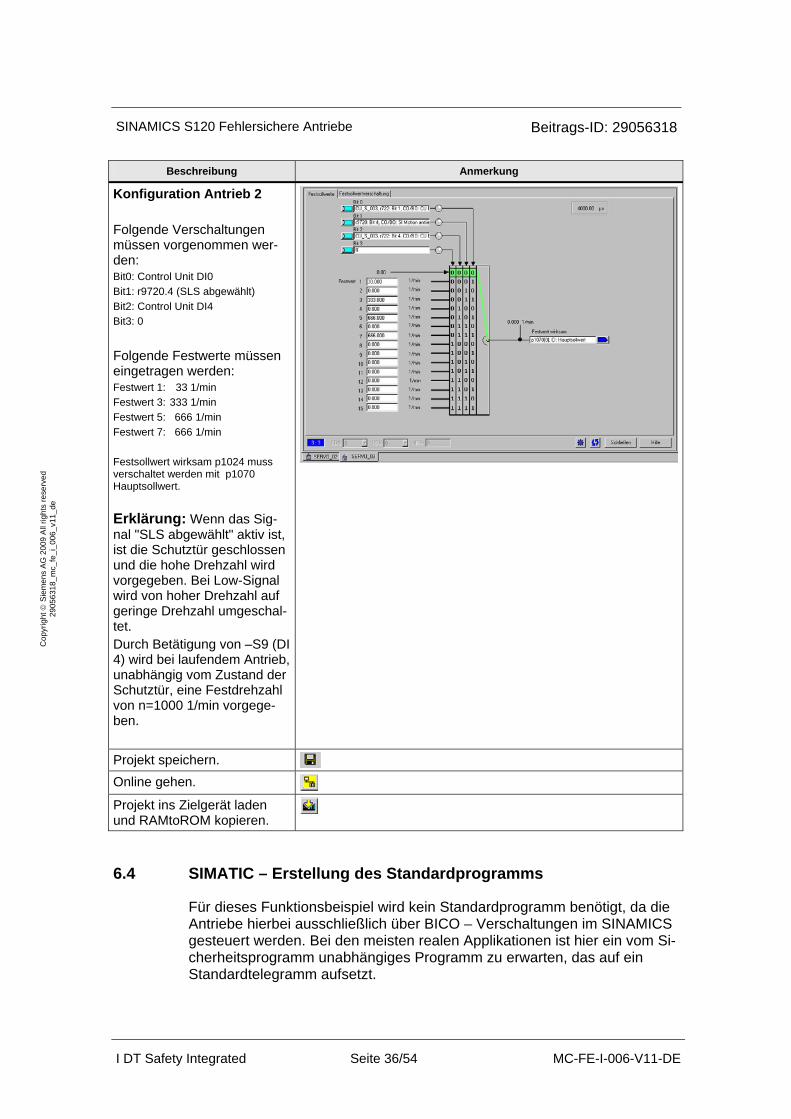
Konfiguration Antrieb 2 Folgende Verschaltungen müssen vorgenommen wer-den: Bit0: Control Unit DI0 Bit1: r9720.4 (SLS abgewählt) Bit2: Control Unit DI4 Bit3: 0 Folgende Festwerte müssen eingetragen werden: Festwert 1: 33 1/min Festwert 3: 333 1/min Festwert 5: 666 1/min Festwert 7: 666 1/min
I DT Safety Integrated Seite 36/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Festsollwert wirksam p1024 muss verschaltet werden mit p1070 Hauptsollwert.
Erklärung: Wenn das Sig-nal "SLS abgewählt" aktiv ist, ist die Schutztür geschlossen und die hohe Drehzahl wird vorgegeben. Bei Low-Signal wird von hoher Drehzahl auf geringe Drehzahl umgeschal-tet. Durch Betätigung von –S9 (DI 4) wird bei laufendem Antrieb, unabhängig vom Zustand der Schutztür, eine Festdrehzahl von n=1000 1/min vorgege-ben. Projekt speichern. Online gehen.
Projekt ins Zielgerät laden und RAMtoROM kopieren.
6.4 SIMATIC – Erstellung des Standardprogramms
Für dieses Funktionsbeispiel wird kein Standardprogramm benötigt, da die Antriebe hierbei ausschließlich über BICO – Verschaltungen im SINAMICS gesteuert werden. Bei den meisten realen Applikationen ist hier ein vom Si-cherheitsprogramm unabhängiges Programm zu erwarten, das auf ein Standardtelegramm aufsetzt.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
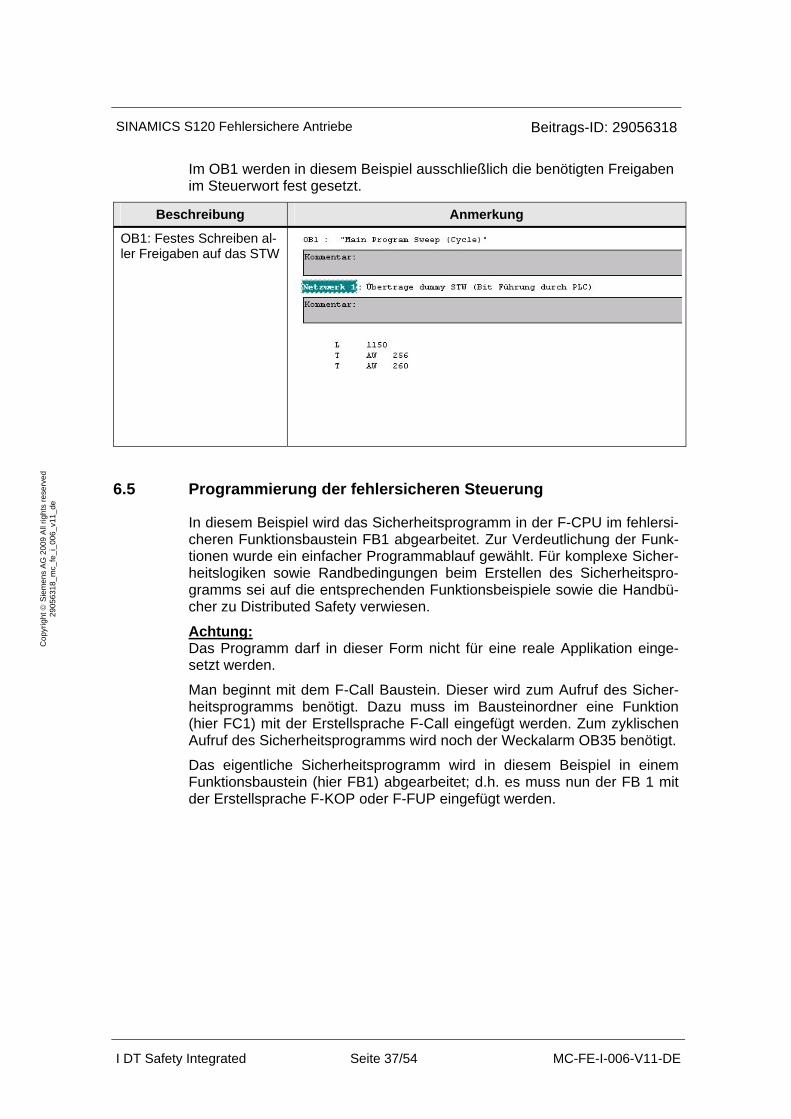
Im OB1 werden in diesem Beispiel ausschließlich die benötigten Freigaben im Steuerwort fest gesetzt.
Beschreibung
I DT Safety Integrated Seite 37/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Anmerkung
OB1: Festes Schreiben al-ler Freigaben auf das STW
6.5 Programmierung der fehlersicheren Steuerung
In diesem Beispiel wird das Sicherheitsprogramm in der F-CPU im fehlersi-cheren Funktionsbaustein FB1 abgearbeitet. Zur Verdeutlichung der Funk-tionen wurde ein einfacher Programmablauf gewählt. Für komplexe Sicher-heitslogiken sowie Randbedingungen beim Erstellen des Sicherheitspro-gramms sei auf die entsprechenden Funktionsbeispiele sowie die Handbü-cher zu Distributed Safety verwiesen.
Achtung: Das Programm darf in dieser Form nicht für eine reale Applikation einge-setzt werden.
Man beginnt mit dem F-Call Baustein. Dieser wird zum Aufruf des Sicher-heitsprogramms benötigt. Dazu muss im Bausteinordner eine Funktion (hier FC1) mit der Erstellsprache F-Call eingefügt werden. Zum zyklischen Aufruf des Sicherheitsprogramms wird noch der Weckalarm OB35 benötigt.
Das eigentliche Sicherheitsprogramm wird in diesem Beispiel in einem Funktionsbaustein (hier FB1) abgearbeitet; d.h. es muss nun der FB 1 mit der Erstellsprache F-KOP oder F-FUP eingefügt werden.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 38/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
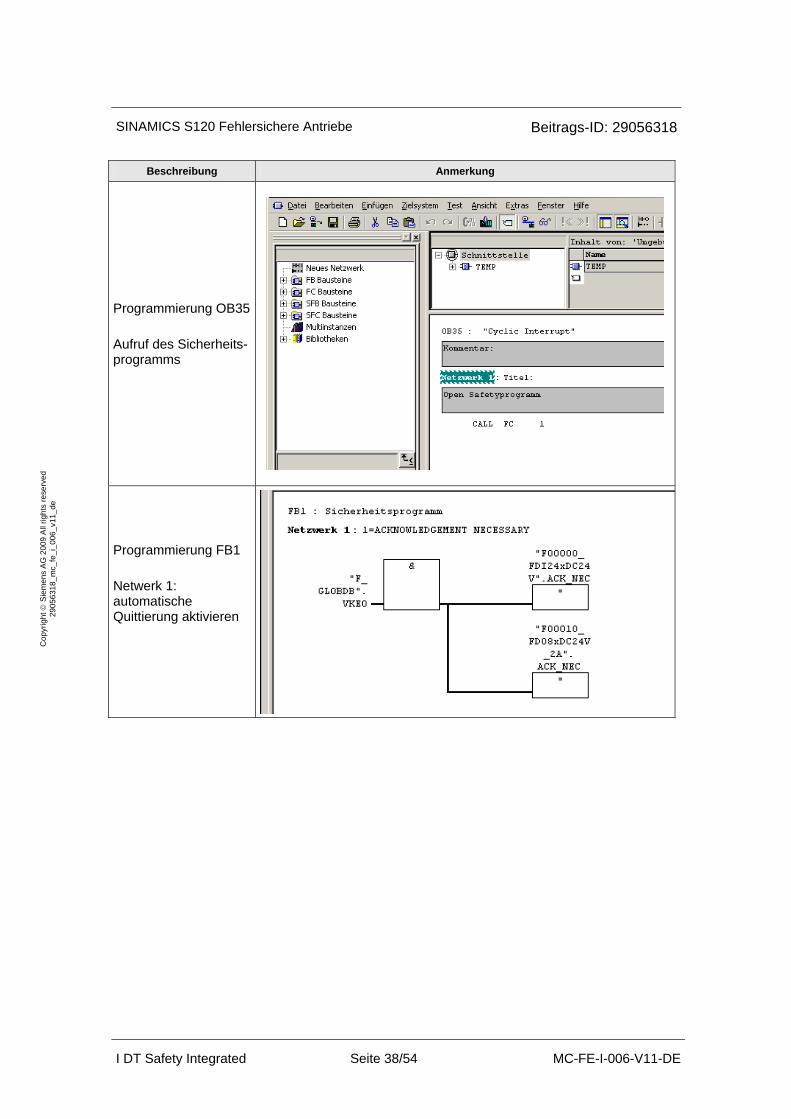
Programmierung OB35 Aufruf des Sicherheits-programms
Programmierung FB1 Netwerk 1: automatische Quittierung aktivieren
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 39/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
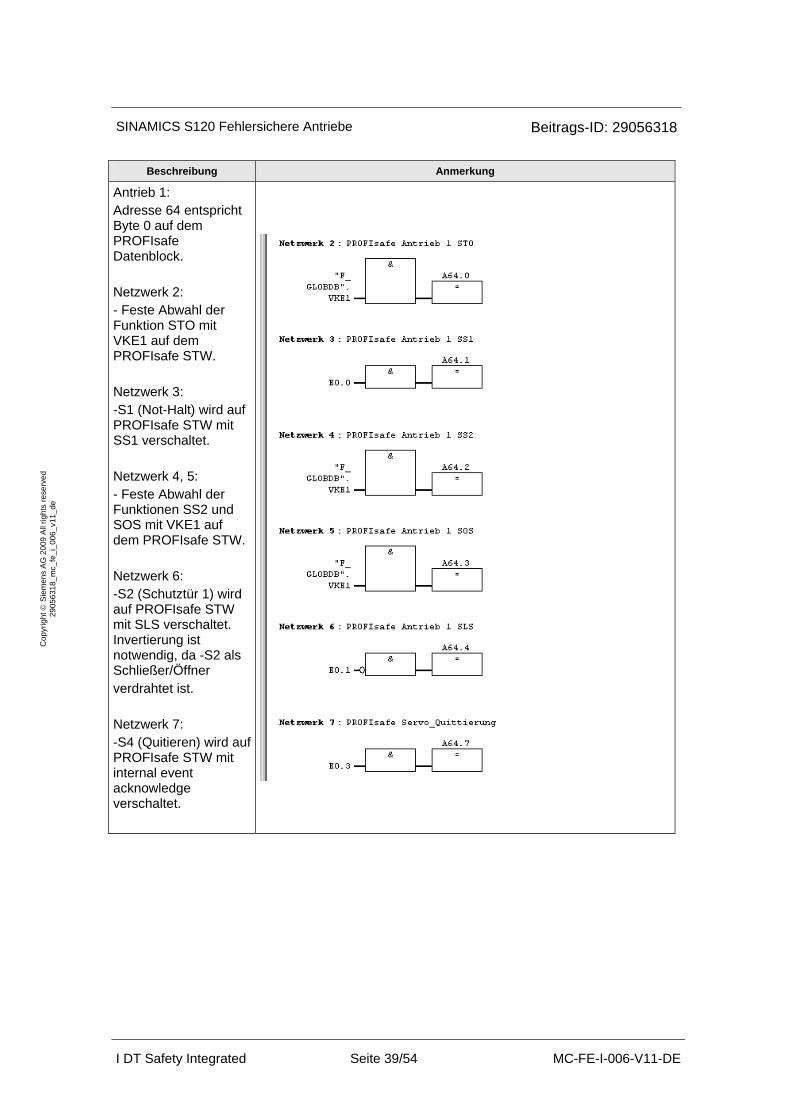
Antrieb 1: Adresse 64 entspricht Byte 0 auf dem PROFIsafe Datenblock. Netzwerk 2: - Feste Abwahl der Funktion STO mit VKE1 auf dem PROFIsafe STW. Netzwerk 3: -S1 (Not-Halt) wird auf PROFIsafe STW mit SS1 verschaltet. Netzwerk 4, 5: - Feste Abwahl der Funktionen SS2 und SOS mit VKE1 auf dem PROFIsafe STW. Netzwerk 6: -S2 (Schutztür 1) wird auf PROFIsafe STW mit SLS verschaltet. Invertierung ist notwendig, da -S2 als Schließer/Öffner verdrahtet ist. Netzwerk 7: -S4 (Quitieren) wird auf PROFIsafe STW mit internal event acknowledge verschaltet.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
Antrieb 1: Adresse 65 entspricht Byte 1 auf dem PROFIsafe Datenblock.
I DT Safety Integrated Seite 40/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
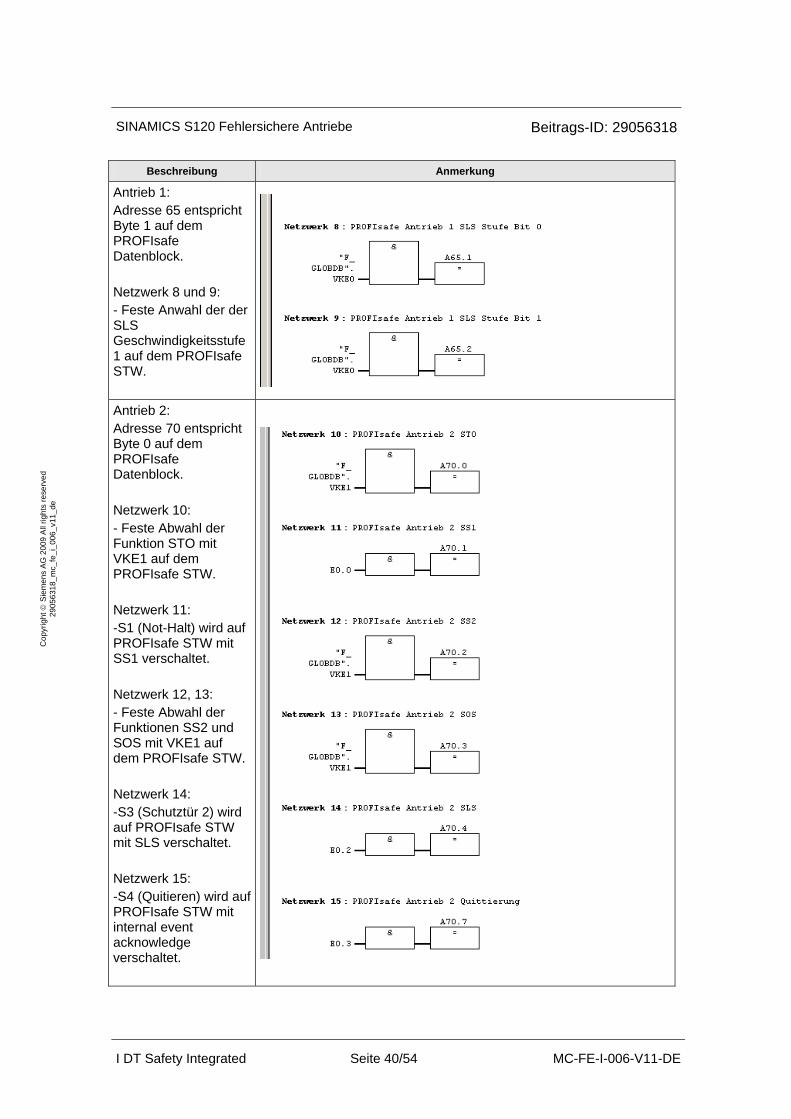
Netzwerk 8 und 9: - Feste Anwahl der der SLS Geschwindigkeitsstufe 1 auf dem PROFIsafe STW. Antrieb 2: Adresse 70 entspricht Byte 0 auf dem PROFIsafe Datenblock. Netzwerk 10: - Feste Abwahl der Funktion STO mit VKE1 auf dem PROFIsafe STW. Netzwerk 11: -S1 (Not-Halt) wird auf PROFIsafe STW mit SS1 verschaltet. Netzwerk 12, 13: - Feste Abwahl der Funktionen SS2 und SOS mit VKE1 auf dem PROFIsafe STW. Netzwerk 14: -S3 (Schutztür 2) wird auf PROFIsafe STW mit SLS verschaltet. Netzwerk 15: -S4 (Quitieren) wird auf PROFIsafe STW mit internal event acknowledge verschaltet.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
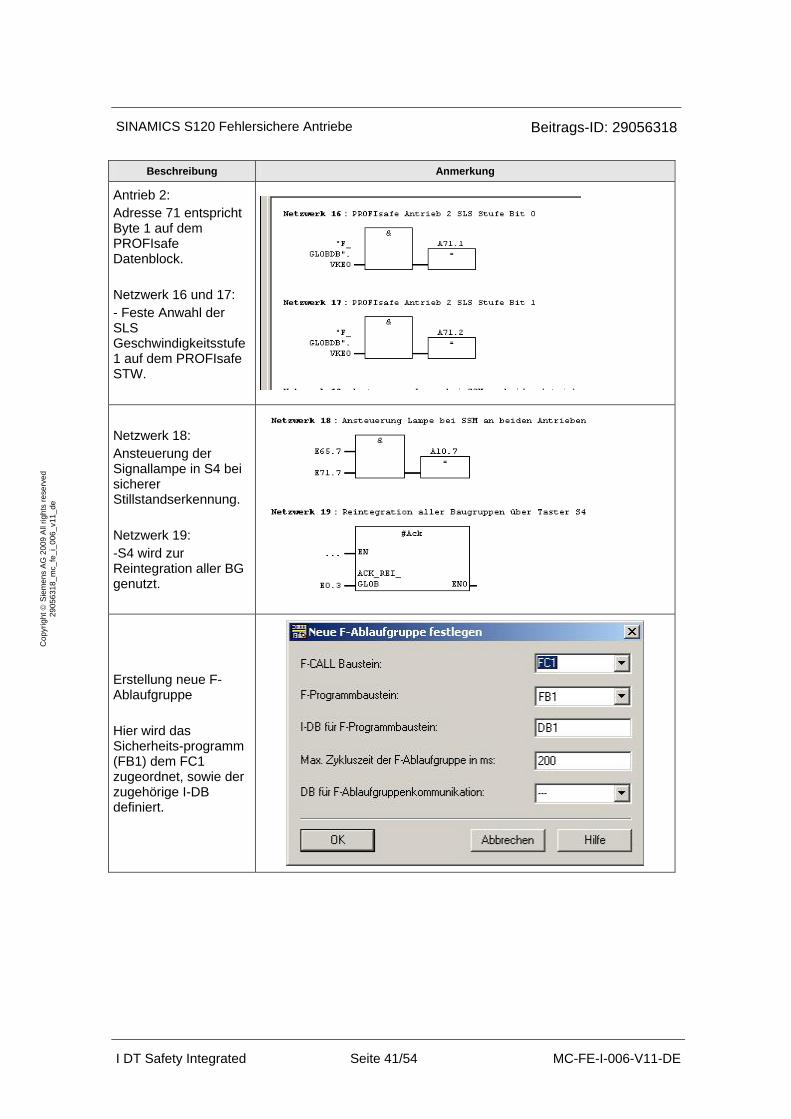
Antrieb 2: Adresse 71 entspricht Byte 1 auf dem PROFIsafe Datenblock. Netzwerk 16 und 17: - Feste Anwahl der SLS Geschwindigkeitsstufe 1 auf dem PROFIsafe STW.
I DT Safety Integrated Seite 41/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Netzwerk 18: Ansteuerung der Signallampe in S4 bei sicherer Stillstandserkennung. Netzwerk 19: -S4 wird zur Reintegration aller BG genutzt.
Erstellung neue F-Ablaufgruppe Hier wird das Sicherheits-programm (FB1) dem FC1 zugeordnet, sowie der zugehörige I-DB definiert.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
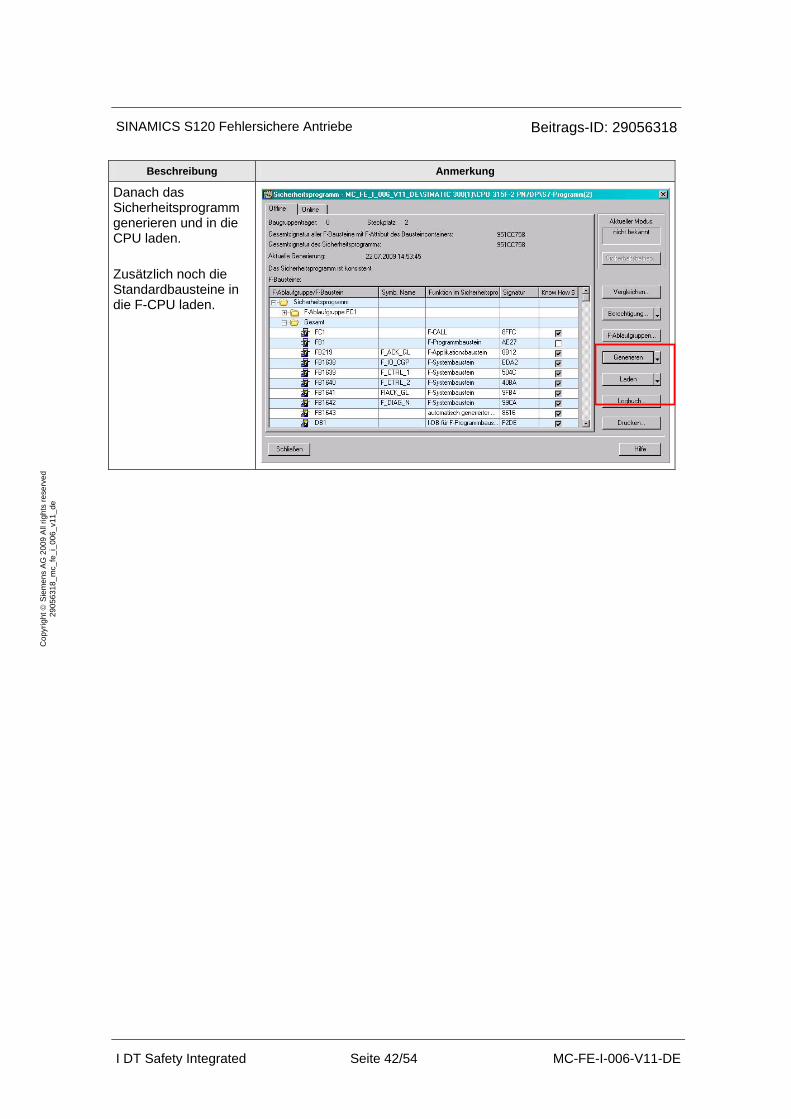
Danach das Sicherheitsprogramm generieren und in die CPU laden. Zusätzlich noch die Standardbausteine in die F-CPU laden.
I DT Safety Integrated Seite 42/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
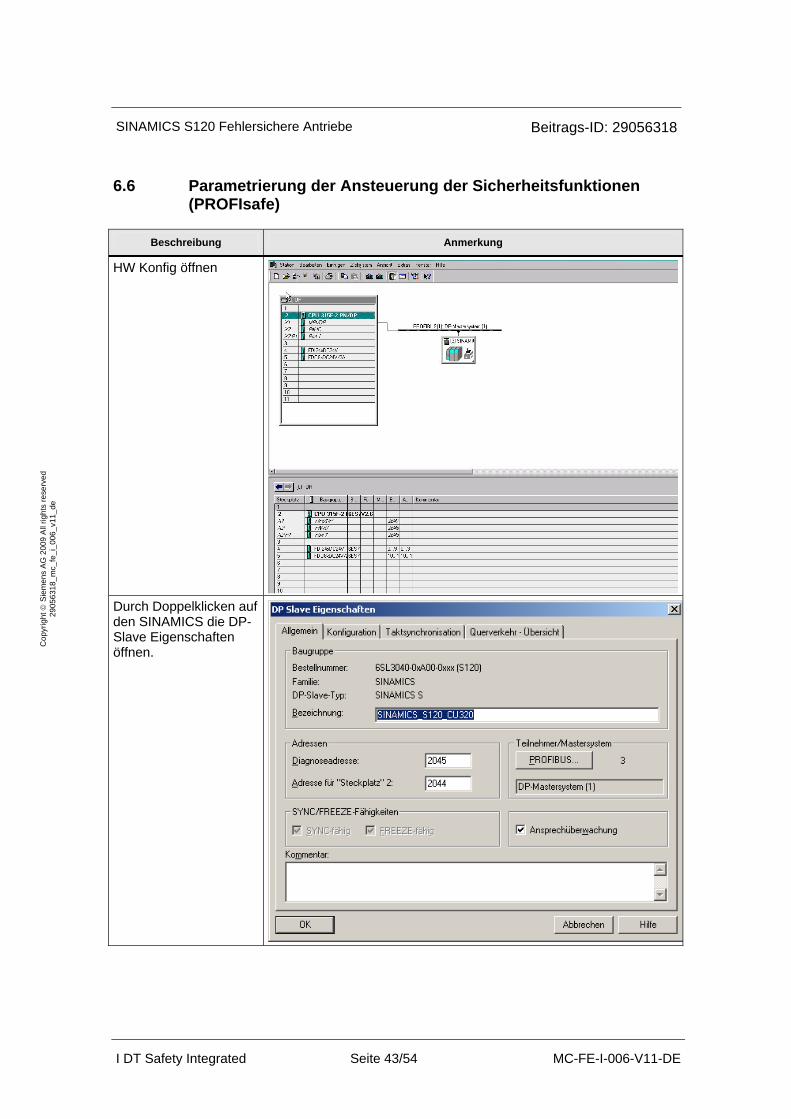
6.6 Parametrierung der Ansteuerung der Sicherheitsfunktionen (PROFIsafe)
I DT Safety Integrated Seite 43/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Beschreibung Anmerkung
HW Konfig öffnen
Durch Doppelklicken auf den SINAMICS die DP-Slave Eigenschaften öffnen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 44/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Beschreibung Anmerkung
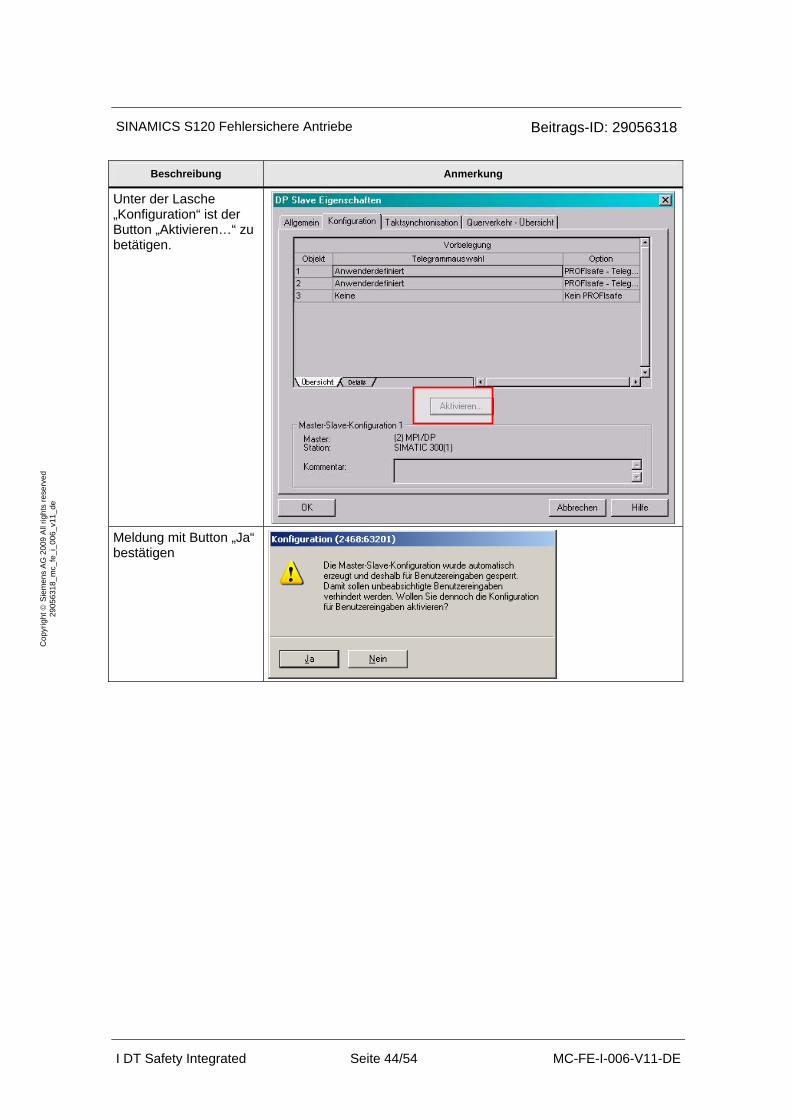
Unter der Lasche „Konfiguration“ ist der Button „Aktivieren…“ zu betätigen.
Meldung mit Button „Ja“ bestätigen
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
I DT Safety Integrated Seite 45/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
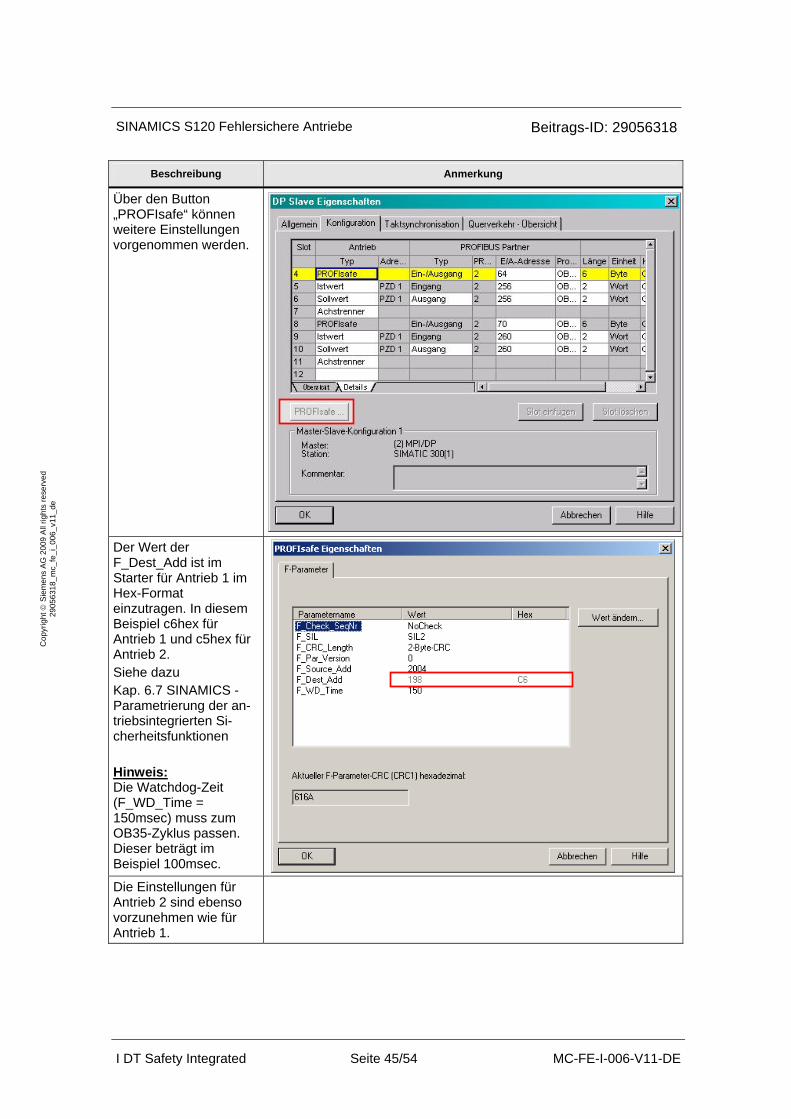
Über den Button „PROFIsafe“ können weitere Einstellungen vorgenommen werden.
Der Wert der F_Dest_Add ist im Starter für Antrieb 1 im Hex-Format einzutragen. In diesem Beispiel c6hex für Antrieb 1 und c5hex für Antrieb 2. Siehe dazu Kap. 6.7 SINAMICS - Parametrierung der an-triebsintegrierten Si-cherheitsfunktionen Hinweis: Die Watchdog-Zeit (F_WD_Time = 150msec) muss zum OB35-Zyklus passen. Dieser beträgt im Beispiel 100msec.
Die Einstellungen für Antrieb 2 sind ebenso vorzunehmen wie für Antrieb 1.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
Die HW-Konfiguration speichern und übersetzen.
Abschließend wird die HW-Konfiguration in das Zielsystem heruntergeladen.
6.7 SINAMICS - Parametrierung der antriebsintegrierten Sicherheits-funktionen
Beschreibung Anmerkung
Im Starter online gehen.
I DT Safety Integrated Seite 46/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
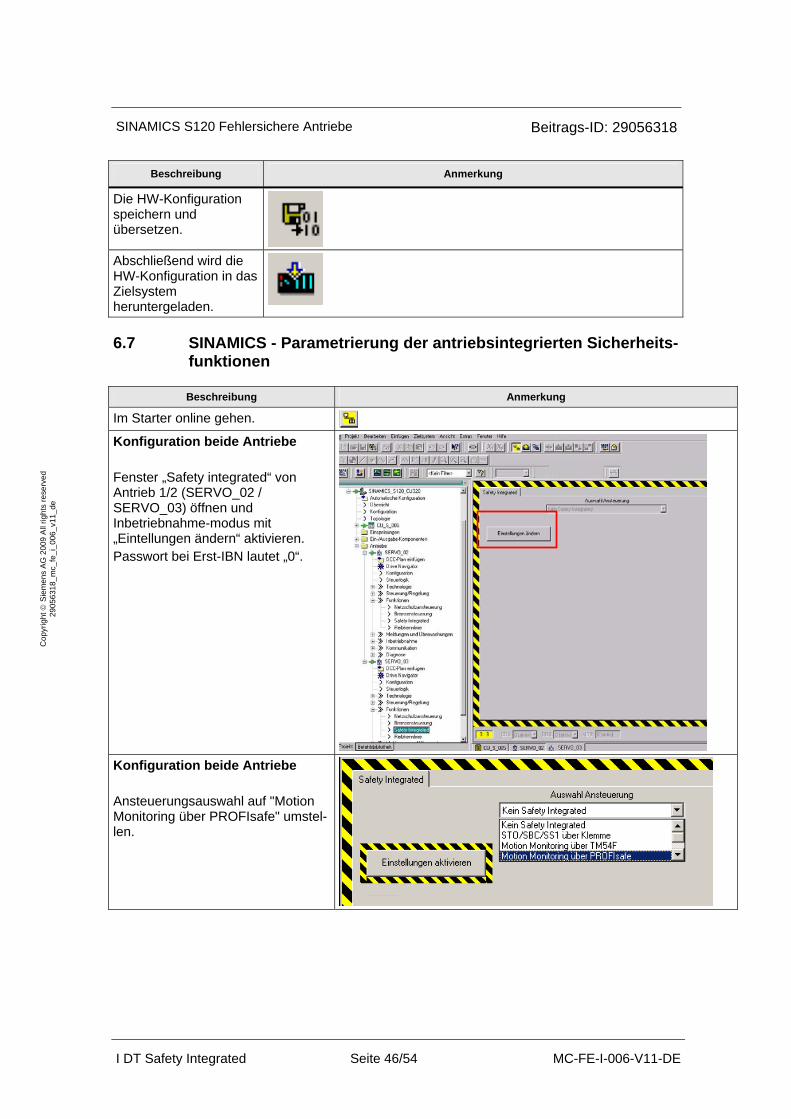
Konfiguration beide Antriebe Fenster „Safety integrated“ von Antrieb 1/2 (SERVO_02 / SERVO_03) öffnen und Inbetriebnahme-modus mit „Eintellungen ändern“ aktivieren. Passwort bei Erst-IBN lautet „0“.
Konfiguration beide Antriebe Ansteuerungsauswahl auf "Motion Monitoring über PROFIsafe" umstel-len.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung
I DT Safety Integrated Seite 47/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Anmerkung
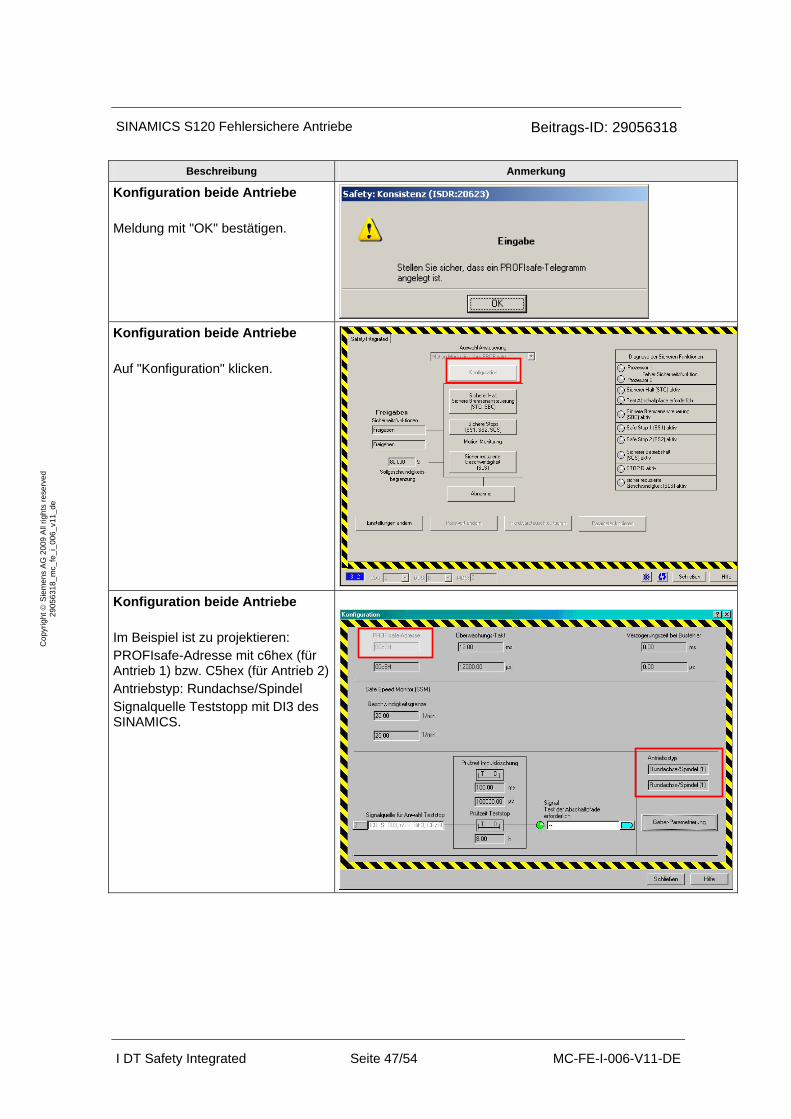
Konfiguration beide Antriebe Meldung mit "OK" bestätigen.
Konfiguration beide Antriebe Auf "Konfiguration" klicken.
Konfiguration beide Antriebe Im Beispiel ist zu projektieren: PROFIsafe-Adresse mit c6hex (für Antrieb 1) bzw. C5hex (für Antrieb 2)Antriebstyp: Rundachse/Spindel Signalquelle Teststopp mit DI3 des SINAMICS.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
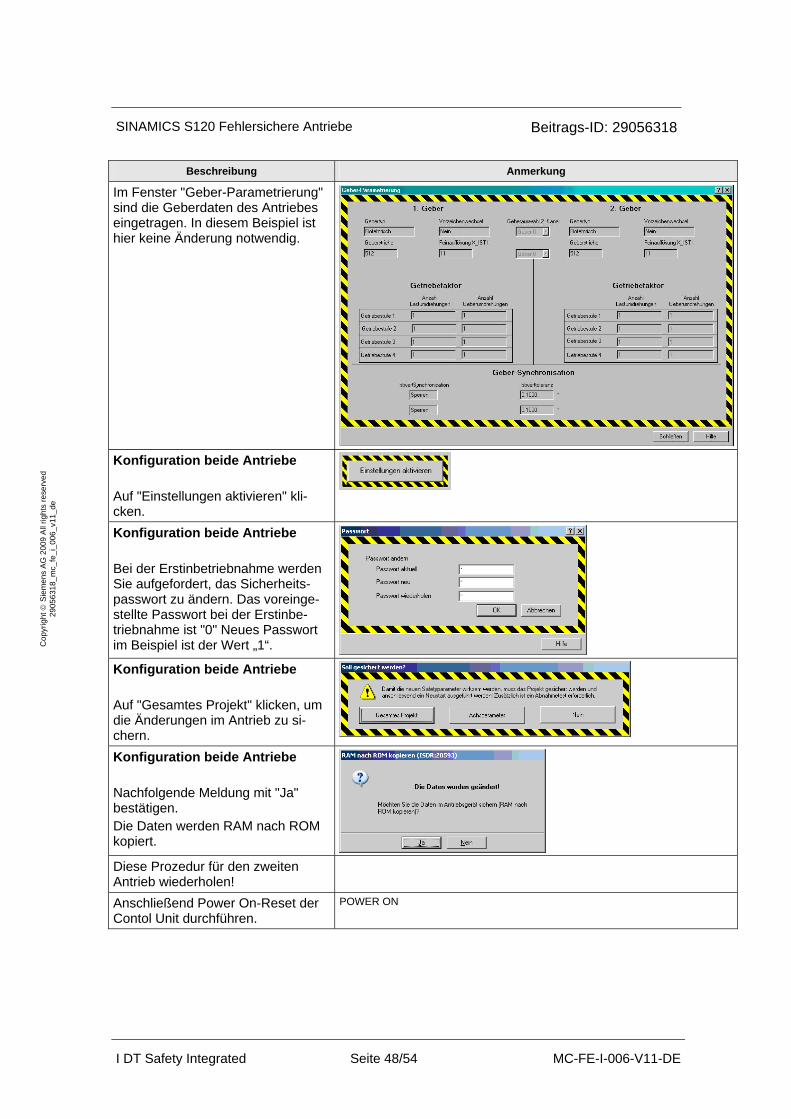
Im Fenster "Geber-Parametrierung" sind die Geberdaten des Antriebes eingetragen. In diesem Beispiel ist hier keine Änderung notwendig.
I DT Safety Integrated Seite 48/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Konfiguration beide Antriebe Auf "Einstellungen aktivieren" kli-cken. Konfiguration beide Antriebe Bei der Erstinbetriebnahme werden Sie aufgefordert, das Sicherheits-passwort zu ändern. Das voreinge-stellte Passwort bei der Erstinbe-triebnahme ist "0" Neues Passwort im Beispiel ist der Wert „1“.
Konfiguration beide Antriebe Auf "Gesamtes Projekt" klicken, um die Änderungen im Antrieb zu si-chern. Konfiguration beide Antriebe Nachfolgende Meldung mit "Ja" bestätigen. Die Daten werden RAM nach ROM kopiert.
Diese Prozedur für den zweiten Antrieb wiederholen!
Anschließend Power On-Reset der Contol Unit durchführen.
POWER ON
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
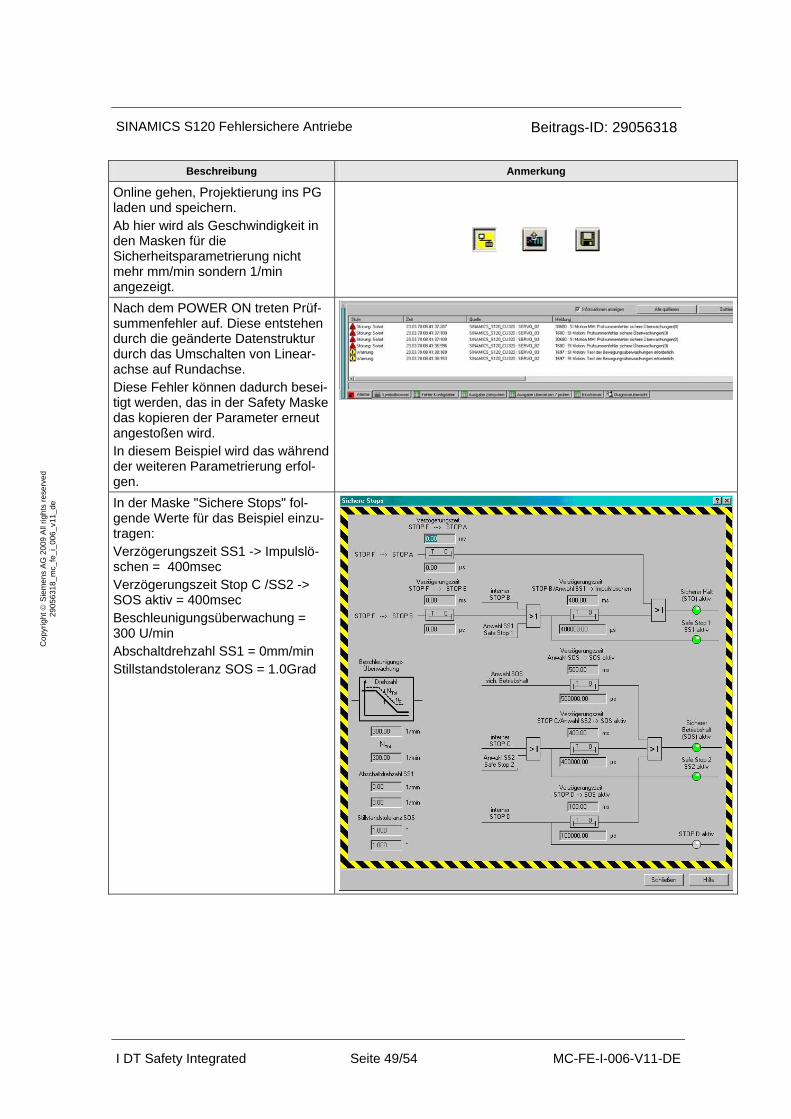
Online gehen, Projektierung ins PG laden und speichern. Ab hier wird als Geschwindigkeit in den Masken für die Sicherheitsparametrierung nicht mehr mm/min sondern 1/min angezeigt.
I DT Safety Integrated Seite 49/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Nach dem POWER ON treten Prüf-summenfehler auf. Diese entstehen durch die geänderte Datenstruktur durch das Umschalten von Linear-achse auf Rundachse. Diese Fehler können dadurch besei-tigt werden, das in der Safety Maske das kopieren der Parameter erneut angestoßen wird. In diesem Beispiel wird das während der weiteren Parametrierung erfol-gen. In der Maske "Sichere Stops" fol-gende Werte für das Beispiel einzu-tragen: Verzögerungszeit SS1 -> Impulslö-schen = 400msec Verzögerungszeit Stop C /SS2 -> SOS aktiv = 400msec Beschleunigungsüberwachung = 300 U/min Abschaltdrehzahl SS1 = 0mm/min Stillstandstoleranz SOS = 1.0Grad
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
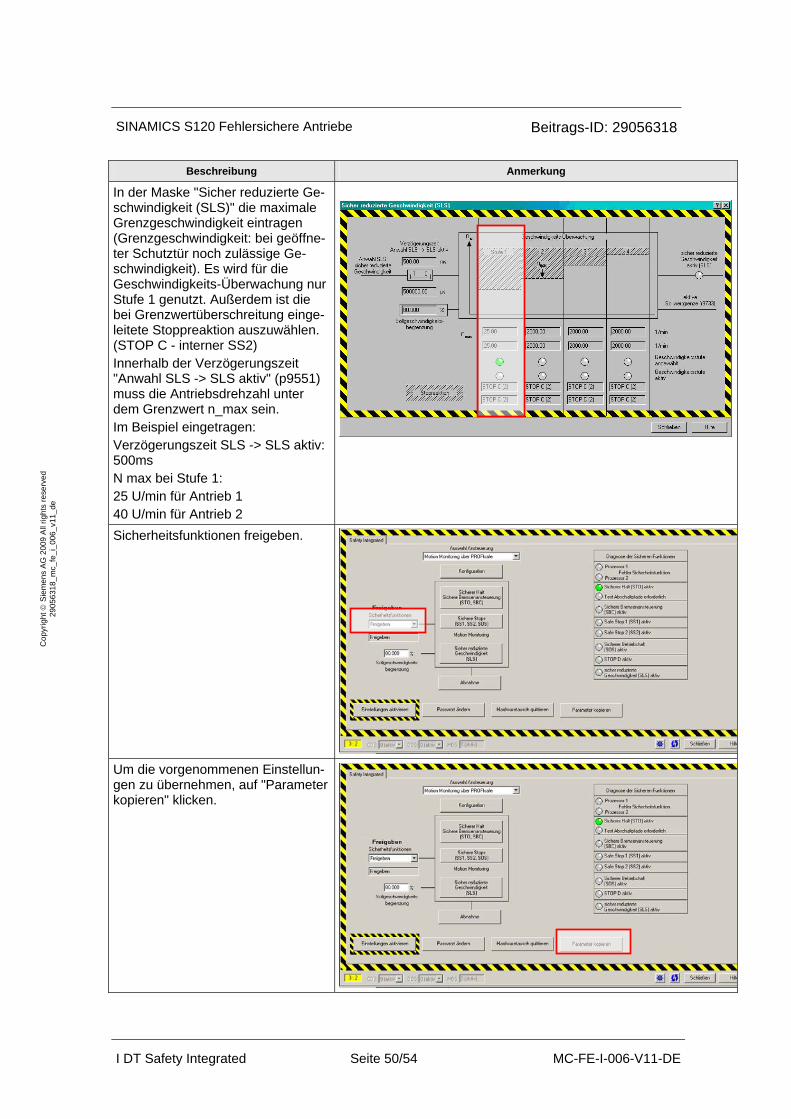
In der Maske "Sicher reduzierte Ge-schwindigkeit (SLS)" die maximale Grenzgeschwindigkeit eintragen (Grenzgeschwindigkeit: bei geöffne-ter Schutztür noch zulässige Ge-schwindigkeit). Es wird für die Geschwindigkeits-Überwachung nur Stufe 1 genutzt. Außerdem ist die bei Grenzwertüberschreitung einge-leitete Stoppreaktion auszuwählen. (STOP C - interner SS2) Innerhalb der Verzögerungszeit "Anwahl SLS -> SLS aktiv" (p9551) muss die Antriebsdrehzahl unter dem Grenzwert n_max sein.
I DT Safety Integrated Seite 50/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Im Beispiel eingetragen: Verzögerungszeit SLS -> SLS aktiv: 500ms N max bei Stufe 1: 25 U/min für Antrieb 1 40 U/min für Antrieb 2
Sicherheitsfunktionen freigeben.
Um die vorgenommenen Einstellun-gen zu übernehmen, auf "Parameter kopieren" klicken.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
Beschreibung Anmerkung
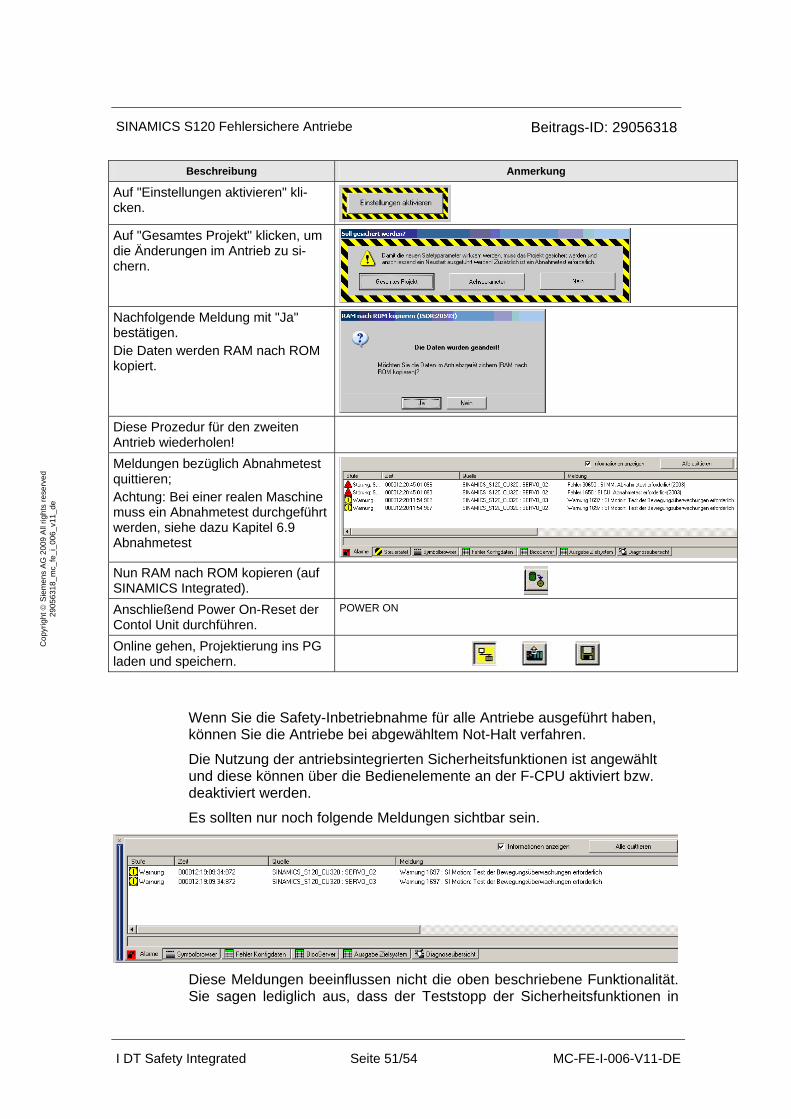
Auf "Einstellungen aktivieren" kli-cken.
I DT Safety Integrated Seite 51/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Auf "Gesamtes Projekt" klicken, um die Änderungen im Antrieb zu si-chern.
Nachfolgende Meldung mit "Ja" bestätigen. Die Daten werden RAM nach ROM kopiert.
Diese Prozedur für den zweiten Antrieb wiederholen!
Meldungen bezüglich Abnahmetest quittieren; Achtung: Bei einer realen Maschine muss ein Abnahmetest durchgeführt werden, siehe dazu Kapitel 6.9 Abnahmetest
Nun RAM nach ROM kopieren (auf SINAMICS Integrated). Anschließend Power On-Reset der Contol Unit durchführen.
POWER ON
Online gehen, Projektierung ins PG laden und speichern.
Wenn Sie die Safety-Inbetriebnahme für alle Antriebe ausgeführt haben, können Sie die Antriebe bei abgewähltem Not-Halt verfahren.
Die Nutzung der antriebsintegrierten Sicherheitsfunktionen ist angewählt und diese können über die Bedienelemente an der F-CPU aktiviert bzw. deaktiviert werden.
Es sollten nur noch folgende Meldungen sichtbar sein.
Diese Meldungen beeinflussen nicht die oben beschriebene Funktionalität. Sie sagen lediglich aus, dass der Teststopp der Sicherheitsfunktionen in
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
den Antrieben notwendig ist (A1697). Es handelt sich hier um Warnungen, d.h. die Antriebe können eingeschaltet und verfahren werden, sobald die Projektierung auf Seiten der SIMATIC S7 abgeschlossen ist.
In diesem Beispiel kann der Teststop über Schalter S9 (DI3) ausgeführt werden.
6.8 Download des Beispielprojekts
Bisher wurde Schritt für Schritt die Erstellung der Projektierung des Funkti-onsbeispiels beschrieben. Für den Fall, dass das Beispielprojekt direkt auf die Hardware geladen werden soll, sind folgende Schritte zu beachten.
Zuerst sollten alle Komponenten (S7-F-CPU und SINAMICS S120) urge-löscht bzw. auf Werkseinstellung zurück gesetzt werden.
6.8.1 Laden der Projektierung der S7-F-CPU
I DT Safety Integrated Seite 52/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
Zuerst muss die HW-Konfiguration der S7-F-CPU herunter geladen wer-den. Die HW-Konfiguration wird per Doppelklick auf „Hardware“ geöffnet.
Abhängig von voreingestellten Werten bzw. der vorherigen Projektierung auf Seiten der F-CPU muss ggf. die Baudrate der PC/PG-Schnittstelle für das Download der Hardwarekonfiguration der F-CPU angepasst werden. Hinweis: Falls vorher ein Safety-Programm auf der CPU vorhanden war, ist dieses durch ein Passwort geschützt. Dieses muss für den Download bekannt sein. Falls es nicht bekannt ist, muss die Speicherkarte mittels eines geeig-neten Geräts (z.B. SIEMENS PG) gelöscht werden. Ein Löschen bzw. For-matieren mit einem Card-Reader zerstört die Karte.
Nach erfolgtem Download der HW-Konfiguration müssen die Programm-bausteine auf die F-CPU geladen werden.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
I DT Safety Integrated Seite 53/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
2
1
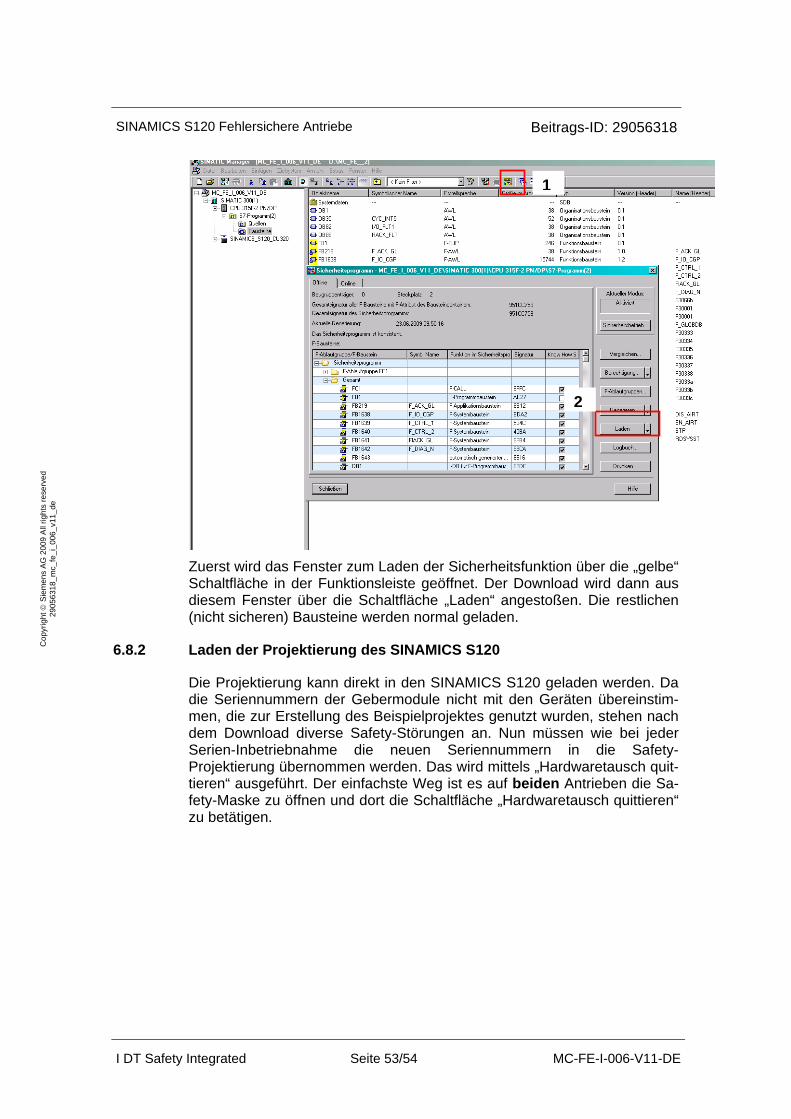
Zuerst wird das Fenster zum Laden der Sicherheitsfunktion über die „gelbe“ Schaltfläche in der Funktionsleiste geöffnet. Der Download wird dann aus diesem Fenster über die Schaltfläche „Laden“ angestoßen. Die restlichen (nicht sicheren) Bausteine werden normal geladen.
6.8.2 Laden der Projektierung des SINAMICS S120
Die Projektierung kann direkt in den SINAMICS S120 geladen werden. Da die Seriennummern der Gebermodule nicht mit den Geräten übereinstim-men, die zur Erstellung des Beispielprojektes genutzt wurden, stehen nach dem Download diverse Safety-Störungen an. Nun müssen wie bei jeder Serien-Inbetriebnahme die neuen Seriennummern in die Safety-Projektierung übernommen werden. Das wird mittels „Hardwaretausch quit-tieren“ ausgeführt. Der einfachste Weg ist es auf beiden Antrieben die Sa-fety-Maske zu öffnen und dort die Schaltfläche „Hardwaretausch quittieren“ zu betätigen.
SINAMICS S120 Fehlersichere Antriebe Beitrags-ID: 29056318
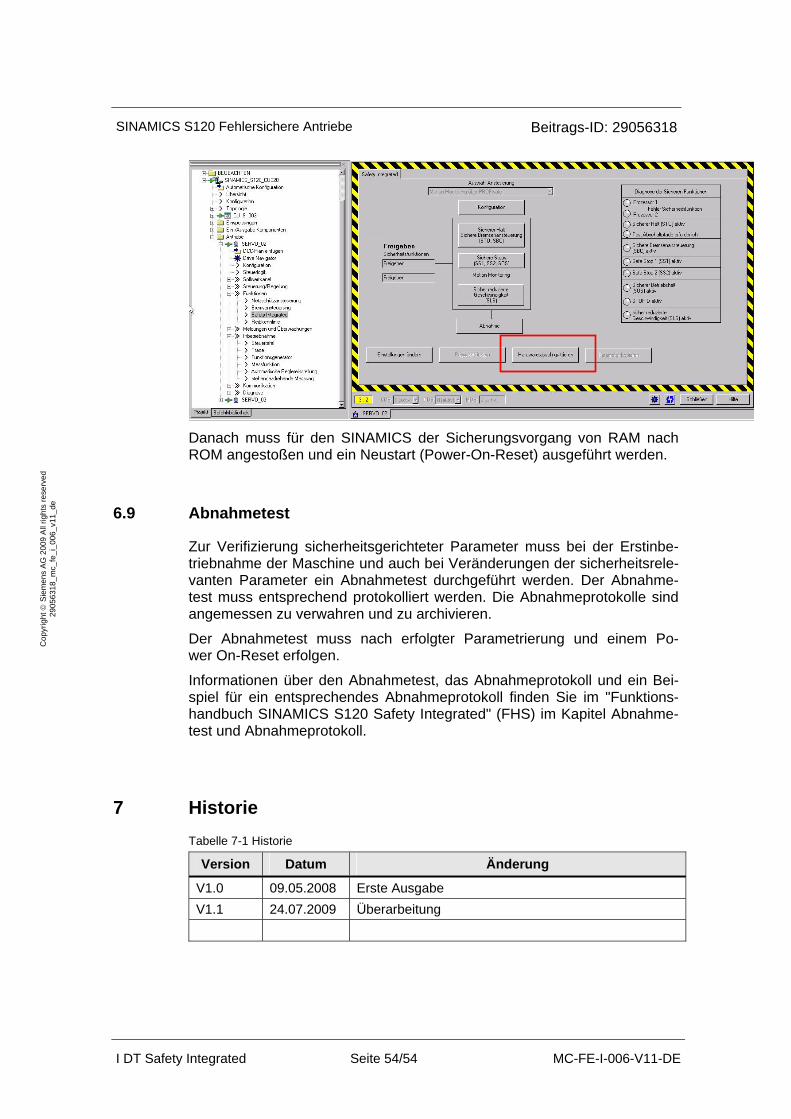
Danach muss für den SINAMICS der Sicherungsvorgang von RAM nach ROM angestoßen und ein Neustart (Power-On-Reset) ausgeführt werden.
I DT Safety Integrated Seite 54/54 MC-FE-I-006-V11-DE
Cop
yrig
ht ©
Sie
men
s A
G 2
009
All
right
s re
serv
ed
2905
6318
_mc_
fe_i
_006
_v11
_de
6.9 Abnahmetest
Zur Verifizierung sicherheitsgerichteter Parameter muss bei der Erstinbe-triebnahme der Maschine und auch bei Veränderungen der sicherheitsrele-vanten Parameter ein Abnahmetest durchgeführt werden. Der Abnahme-test muss entsprechend protokolliert werden. Die Abnahmeprotokolle sind angemessen zu verwahren und zu archivieren.
Der Abnahmetest muss nach erfolgter Parametrierung und einem Po-wer On-Reset erfolgen.
Informationen über den Abnahmetest, das Abnahmeprotokoll und ein Bei-spiel für ein entsprechendes Abnahmeprotokoll finden Sie im "Funktions-handbuch SINAMICS S120 Safety Integrated" (FHS) im Kapitel Abnahme-test und Abnahmeprotokoll.
7 Historie Tabelle 7-1 Historie
Version Datum Änderung
V1.0 09.05.2008 Erste Ausgabe V1.1 24.07.2009 Überarbeitung