Embed Size (px)
Citation preview

1
Short-range Localization Techniques for Wireless Sensor Networks
Davide Dardari
WiLAB – CNIT - University of BolognaDepartment of Electronics, Computer Science and Systems
2
D. Dardari, WiLAB, University of Bologna
Summary
• Motivations
• Localization basics
• Ranging (theoretical aspect and practical schemes)
• Position estimation
• Position tracking
• Case studies
• Advanced issues

2
3
D. Dardari, WiLAB, University of Bologna
Why localization is important
• new context aware applications (e.g., real-time location systems, RTLS)• new market opportunities ($6 Billion in 2017*)
[VICOM Project www.vicom-project.com]
Some examples:• inventory/people tracking (RFID)• surveillance/security• wireless sensor networks (WSN)• virtual immersive and augmented reality applications
* R. Das and P. Harrop ”RFID Forecast, Players and Opportunities 2007-2017”, 2007, http://www.idtechex.com.
4
D. Dardari, WiLAB, University of Bologna
In WSNs……
Sensed data without position and time information is often meaningless
For example, in habitat environments monitored sensed events must be ordered both in time and space to permit a correct interpretation.

3
5
D. Dardari, WiLAB, University of Bologna
In addition…
Positioning and time synchronization are also essential for basic mechanisms composing the WSN to work efficiently:
•MAC scheduling algorithms can reduce packet collisions•power-saving strategies (wake-up sleeping times)•networking protocols to improve performance of routing algorithms (geo-routing)•enabling interference avoidance techniques in future cognitive radios
In many schemes proper time synchronization is required to achieve high ranging accuracies in positioning techniques
6
D. Dardari, WiLAB, University of Bologna
• high localization accuracy (<1m) in harsh environments (e.g., indoor)
• low device complexity (low cost, low size)
• standards (e.g., IEEE802.15.4a)
Needs
But in many cases:
• nodes are GPS-denied (e.g., indoor, urban canyon)
• GPS is too expensive (e.g., WSN) and only a small fraction of nodes (anchors) have positioning information due to cost, size and power constraints
• higher accuracy than GPS is required
• no infrastructure available (anchor-free), only relative coordinates are estimated (ah hoc networks)

4
7
D. Dardari, WiLAB, University of Bologna
Localization basics
8
D. Dardari, WiLAB, University of Bologna
Localization Basics
The purpose of any localization algorithm is, given a set of measurements, to find the locations of target nodes with unknown positions.
Positioning occurs in two main steps:
1. Selected measurements are conducted between nodes2. Measurements are combined to determine the locations
of target nodes (localization algorithm).

5
9
D. Dardari, WiLAB, University of Bologna
Ingredients for localization-aware applications
AlgorithmsAlgorithms
TechnologiesTechnologies
Position‐Based ApplicationsPosition‐Based Applications
RSSI, ToA, TDoA, AoA, …
Robustw/o memoryRange-, angle-, proximity-basedw/o cooperation
Error sourcesUncertainty
10
D. Dardari, WiLAB, University of Bologna
Position estimation techniques classification (1/2)
•Anchor-based - Using GPS or using predefined coordinates, a subset of nodes in the network know their position a priori (these nodes are typically named anchors or beacons). Nodes with unknown positions (targets) use positioning information from anchors to determine their location.
Ranging between anchors and other nodes can be obtained by:- direct interaction (Single-Hop), - indirectly by means of intermediate nodes (Multi-Hop).
•Anchor-free - No nodes in the network have knowledge of their position a priori. Only relative coordinates can be found in such networks.

6
11
D. Dardari, WiLAB, University of Bologna
•Range-based - Measurements provide distance information among nodes (*)
•Angle-based - Measurements provide angle information among nodes
•Range-free - Only connectivity information is used (*)
Position estimation techniques classification (2/2)
Other techniques
•Interferometric – (low complexity, problems with multipath) (*)•Scene analysis – (e.g., based on receiver power “signature”)•Inertial – (error accumulation)•DC magnetic tracker – (accurate but expensive and low range)•Optical – (laser ranging systems, very accurate but expensive)•Hybrid – (e.g., Range-free and Inertial) (*)
(*) suitable for low cost devices (e.g., WSNs)
12
D. Dardari, WiLAB, University of Bologna
Distance estimation:
Ranging

7
13
D. Dardari, WiLAB, University of Bologna
Distance Estimation: Ranging
• Received Signal Strength (RSS)– direct RSS-distance mapping
– interferometric
• Time-Based– e.m. waves
– ultrasound
• Near field (phase difference between the E & H fields in the near range) (Q trace corporation)
Ranging between two nodes is the technique employed by two nodes in the network to determine the physical distance between them.
Node A Node B
Possible technologies
14
D. Dardari, WiLAB, University of Bologna
Ranging based on RSS measurements
• Theoretical and empirical models are used to translate the difference between the transmitted signal strength and the RSS into a range estimate.
• Propagation effects (refraction, reflection, shadowing, and multipath) cause the attenuation to poorly correlate with distance
Inaccurate distance estimates
Time synch between nodes is not required
PR(dBm)
PR(dBm)
Unrealisticdeterministicchannel
Randomchannel
d d
-100-90-80-70-60-50-40-30-20-10
00,00 5,00 10,00 15,00 20,00 25,00 30,00
Distance (m)
RSS
I (db
m)

8
15
D. Dardari, WiLAB, University of Bologna
RSS ranging: theoretical bound
•The MSE bound does not depend on signal structure•RSS ranging does not require time synchronization between nodes•No dedicated HW
Received power v.s. distance model (in dBm):
Cramer-Rao bound (CRB) for the distance estimation MSE
Note: the CRB provides a minimum bound on the variance of any unbiased estimator.
Var³d̂´≥µln 10
10
σSγd
¶2.
Pr(d) = P0 − 10 γ log10 d+ SP0 received power (in dBm) at a reference distance of 1 meterγ: path-loss exponent (typiacl values between 2 and 5)S: Gaussian random variable with zero mean and standard deviation σS (shad-owing spread). It accounts for large-scale random fluctuations (shadowing).
16
D. Dardari, WiLAB, University of Bologna
Interferometric Ranging (1/2)
M. Maroti, P. Völgyesi, S. Dora, B. Kusy, A. Nadas, A. Ledeczi, G. Balogh, and K. Molnar, “Radio interferometricgeolocation,” in Proc. ACM Conference on Embedded Networked Sensor Systems, San Diego, USA, Nov. 2005, pp. 1–12.
•Transmitters A and B transmit sinusoids at slightly different frequencies
•The envelope of the received composite signal, after band-pass filtering, will vary slowly over time.
•The phase offset of this envelope can be measured using cheap low-precision RF chips, and it contains information about the difference in distance of the two links.

9
17
D. Dardari, WiLAB, University of Bologna
Interferometric Ranging (2/2)
•To solve the unknown initial phase of the two transmitted sinusoids (no time synch is present), a similar measurement is made by node D in a different location
•The difference in phase offset measured at the two receivers only depends on the four distances. Hence, given a number of phase-offset-difference measurements, the unknown locations of the two receivers may be inferred.
Comments:
•Sub-meter precision can be achieved in outdoor environments with simple hardware•Problems with severe multi-path (e.g., indoor)
•Infrastructure required.
18
D. Dardari, WiLAB, University of Bologna
Time-Based Ranging
• One-way Time-of Arrival (TOA) ranging
Node BNode A t1 t2
Node A Node B
• Two-way TOA ranging
τ̂f =(t2−t1)+(t4−t3)
2
τ̂f = t2 − t1
The distance information between a pair of nodes A and B (ranging) can beobtained using the measurement of the propagation delay or Time-of-Flight(TOF) τf = d/c, where d is the actual distance between A and B.

10
19
D. Dardari, WiLAB, University of Bologna
Time-Difference-of-Arrival (TDOA) (1/3)
TDOA scheme A TDOA scheme B
Networks with infrastructure (anchor nodes) and accurate anchorssynchronization (e.g., through cable connections) are required
20
D. Dardari, WiLAB, University of Bologna
Time-Difference-of-Arrival (TDOA) (2/3)
A typical approach uses a geometric interpretation to calculate the intersection of two or more hyperbolas: each sensor pair gives a hyperbola which represents the set of points at a constant range difference (time-difference) from two sensors

11
21
D. Dardari, WiLAB, University of Bologna
Time-Difference-of-Arrival (TDOA) (3/3)
Networks with infrastructure (anchor nodes) and accurate anchorssynchronization (e.g., through cable connections) are required
TDOA scheme B suitable for extremely low complexity targets nodes (e.g., TAGs in UWB-RFID systems)
22
D. Dardari, WiLAB, University of Bologna
All time-based ranging techniques require
time-of-arrival (TOA) estimation of the received signal
Hence, accurate TOA estimationand time measurement are required!
For example, τf = 1 ns means a distance d ≈ 30 cm

12
23
D. Dardari, WiLAB, University of Bologna
Only an estimation of the real time t can be obtained due to node local oscillator frequency drift
Time Measurements (1/2)
Reasonable model:
T(t) = (1 + δ)t+ µ
δ: clock driftrelative to the correct rateµ: clock offset.
The rate of a perfect clock, dT(t)/dt, would equal 1 (i.e., δ = 0).
The clock performance is often expressed in terms of part-per-million (ppm)defined as the maximum number of extra (or missed) clock counts over a totalof 106 counts, i.e., δ · 106.
24
D. Dardari, WiLAB, University of Bologna
Time Measurements (2/2)
Suppose that a node intends to generate a time delay of τd seconds,the effective generated delay τ̂d in the presence of a clock drift δ would be
τ̂d =τd1 + δ
In case a node has to measure a time interval of true durationτ = t2 − t1 seconds, the corresponding estimated value τ̂ would be
τ̂ = T(t2)− T(t1) = τ (1 + δ)
In both cases there is no dependence on the clock offset µ.

13
25
D. Dardari, WiLAB, University of Bologna
One-Way TOA Ranging: effect of clock drifts
According to nodeA’s local time, the packet is transmitted at time t(A)1 = TA(t1)
(included as a timestamp in the packet) and it is received at node B’s local time
t(B)2 = TB(t2). Node B calculates the estimated propagation delay as
τ̂f = t(B)2 − t(A)1 = τf · (1 + δA) + t2 · (δB − δA) + µB − µA
clock offsets may be in the order of us, one-way raging tied to network synchronization
One-way ranging requires stringent network synchronization constraints whichare often not feasible in low-cost systems.
26
D. Dardari, WiLAB, University of Bologna
Possible application of one-way TOA ranging
Ultrasound devices•propagation speed of acoustic waves (@340 m/s) is much lower than light-speed •synchronization errors can be several orders of magnitude smaller than the typical propagation delay values
•high positioning accuracy (3 cm)
Ultrasound technology has several disadvantages
•Hybrid technology•Propagation limited by walls (coverage)•Effect of temperature and pressure (calibration)•Power-hungry
A. Harter, A. Hopper, P. Steggles, A. Ward and P. Webster ”The anatomy of a Context-Aware Application”, In Wireless
Networks, Vol. 8, pp. 187-197, Feb. 2002.
Active Bat localization system

14
27
D. Dardari, WiLAB, University of Bologna
Two-Way TOA Ranging: effect of clock drifts (1/2)
The effective response delay introduced by node B is τd/(1 + δB), whereas theestimated RTT denoted by τ̂RT, according to node A’s time scale, is
τ̂RT = 2 τf(1 + δA) +τd(1 + δA)
(1 + δB)
In absence of other information, node A derives the estimation of the propaga-tion time, τ̂f, by equating the previous equation with the supposed round-triptime 2 τ̂f + τd leading to an error
τ̂f − τf = τf δA +ε τd
2(1 + δA − ε)≈ ε τd2(1 + δA − ε)
where ε , δA − δB .
τf: in the order of nanosecondsτd: in the order of microseconds/milliseconds (includes the time for packetacquisition, sync., channel estimation, etc.)
28
D. Dardari, WiLAB, University of Bologna
Two-Way TOA Ranging: effect of clock drifts (2/2)
10−7
10−6
10−5
10−12
10−11
10−10
10−9
10−8
10−7
ε
Ran
ging
err
or (
s)
τd=1 µs
τd=10 µs
τd=100 µs
τd=1 ms
τd=10 ms
Low response delay must be ensured for high ranging accuracy
The ranging protocol must be implemented at PHY/MAC level

15
29
D. Dardari, WiLAB, University of Bologna
Mitigation of clock frequency offsets
τ̂f − τf = τf δA
Example:
• each node locally measures the (known) received packet duration and exchange its measure with the other node
• from the 2 measurements node A can evaluate a correction factorwhich applies to its estimated propagation time.
• In this case the error becomes
30
D. Dardari, WiLAB, University of Bologna
Remarks
•Two-way ranging requires less stringent synchronization constraints compared to one-way ranging (relative clock drifts still affect ranging accuracy)
•Suitable for networks without infrastructure (e.g., ad hoc networks)
•Main scheme adopted in the IEEE 802.15.4a standard

16
31
D. Dardari, WiLAB, University of Bologna
Time-of-Arrival (ToA) estimation
32
D. Dardari, WiLAB, University of Bologna
Time-of-Arrival Estimation (TOA)
Consider the transmission of a single pulse p(t) in AWGN channel in the absence of other sources of error. The received signal is
Problem statement in an ideal scenario
Classical non-linear parameter estimation problem
r(t) =pEp p(t− τ) + n(t)
The problem is to obtain the best estimate for the TOA, τ , based on the receivedsignal r(t) observed over the interval [0, Tob).

17
33
D. Dardari, WiLAB, University of Bologna
Maximum likelihood (ML) TOA estimator
The ML TOA estimator is asymptotically efficient in AWGN
matchedfilter
34
D. Dardari, WiLAB, University of Bologna
The estimation Mean Square Error (MSE) of any unbiased estimation τ̂ of τcan be bounded by the Cramer-Rao bound (CRB)
Var (τ̂ ) = E©(τ̂ − τ )2
ª≥ CRB
Theoretical limits in AWGN
The CRB is given by
CRB =N0/2
(2π)2Ep β2=
1
8π2 β2 SNR
where− SNR , Ep/N0− β2 represents the second moment of the spectrum P (f) of p(t) defined by
β2 ,R∞−∞ f
2|P (f)|2 dfR∞−∞ |P (f)|2 df
− β: effective bandwidth

18
35
D. Dardari, WiLAB, University of Bologna
Bound on ranging MSE
Increase the SNR towards very narrowband systems
To mitigate the effect of multipath in indoor environments, low frequency bands must be used not practical for small size devices due to large antennas
Increase the bandwidth towards ultra wideband (UWB) systems
Higher frequencies bands can be used. Multipath can be resolvable.Technique chosen by the IEEE 802.15.4a standard
Lower bound on ranging MSE
How to improve the accuracy?
Var³d̂´≥ c2
8π2 β2 SNR.
36
D. Dardari, WiLAB, University of Bologna
Ranging using UWB signals

19
37
D. Dardari, WiLAB, University of Bologna
Impulse Radio UWB (IR-UWB)
Example of Gaussian
6th derivative monocycle
Base-band generation
of the signal
•Low complexity (no RF and IF stages)
•Low consumption
Spectrum
−0.5 −0.4 −0.3 −0.2 −0.1 0.0 0.1 0.2 0.3 0.4 0.5time (ns)
−4
−3
−2
−1
0
1
2
3
4
Am
plitu
de
0 1 2 3 4 5 6 7 8 9 10 11 12Frequency (GHz)
−50
−40
−30
−20
−10
0
10
norm
aliz
ed P
SD
[dB
]
normalized FCC maskpulse spectrum
38
D. Dardari, WiLAB, University of Bologna
Theoretical Performance Limits
Theoretical performance limits (bounds) serve as useful benchmarks in assessing the performance of newly developed TOA estimation techniques
The performance of the TOA estimator, like all non-linear estimators, is characterized by the presence of distinct SNR regions corresponding to different modes of operation:
- Low SNR region (a priori region), signal observations provide little new information- High SNR region (asymptotic region), the MSE is accurately described by the CRB- Medium SNR (transition region or ambiguity region), observations are subject to ambiguities that are not accounted for by the CRB
This behaviour is referred to as the threshold effect

20
39
D. Dardari, WiLAB, University of Bologna
Improved bounds
Unfortunately, the CRB is not accurate at low and moderate SNR and/or when the observation time is short improved bounds
The Ziv-Zakai Lower Bound
The Ziv-Zakai bound (ZZB) can be applied to a wider range of SNRs, but more complex than CRB for analytical evaluation
40
D. Dardari, WiLAB, University of Bologna
The Ziv-Zakai Lower Bound
where Pmin (τ ) is the error probability of the classical binary detection schemewith equally probable hypothesis:
H1 : r(t) ∼ p {r(t)|τ}H2 : r(t) ∼ p {r(t)|τ + z}
When τ is uniformly distributed in [0, Ta), the ZZB is
ZZB =1
Ta
Z Ta
0
z (Ta − z)Pmin (z) dz
In AWGN the minimum attainable probability of error becomes
Pmin (z) = Q
µqSNR (1− ρp(z))
¶where Q (·) is the Gaussian Q-function and ρp(z) is the autocorrelation functionof p(t).

21
41
D. Dardari, WiLAB, University of Bologna
0 5 10 15 20 25 30 35 40SNR (dB)
10-13
10-12
10-11
10-10
10-9
10-8
10-7
RM
SE
(s)
CRB, RRC, τp=3.2 ns
ZZB, RRC, τp=3.2 ns
CRB, RRC, τp=1 ns
ZZB, RRC, τp=1 ns
CRB, Gauss. deriv., n=2
ZZB, Gauss. deriv., n=2
CRB, Gauss. deriv., n=6
ZZB, Gauss. deriv., n=6
TOA estimation theoretical limits using UWB pulses
From D. Dardari, C.-C. Chong, and M. Z. Win, “Improved lower bounds on time-of-arrival estimation error in realistic UWB channels,” in IEEE International Conference on Ultra-Wideband, ICUWB 2006, (Waltham, MA, USA), pp. 531–537, Sept. 2006.
CRB and Ziv-Zakai Bound in AWGN (single path)
30 cm
3 cm
3 mA priori RMSE Ta/
√12 A priori region
Asymptotic region
Ambiguity region
42
D. Dardari, WiLAB, University of Bologna
Main sources of error
in TOA Ranging

22
43
D. Dardari, WiLAB, University of Bologna
Main Issues in UWB TOA Estimation
Rich multipath(ambiguities in first path detection, paths overlapping)
Non Line-of-Sight (NLOS)
conditions•direct path blockage•extra propagation delay due to different e.m. propagation speeds
Interference(narrowband and wideband)
In addition:• clock drift (time synch algorithms)• design of low-complexity TOA estimators
44
D. Dardari, WiLAB, University of Bologna
TOA Estimation in Multipath Environments
In general, dense multipath is composed of tens or hundreds paths.It may be difficult to recognize the first path, especially at low and medium SNRs
detection of first path may be challengingPaths could be partially overlapped (not resolvable channel)
Moe Z. Win, and Robert A. Scholtz, “Characterization of Ultra-Wide Bandwidth Wireless Indoor Channels: A Communication-Theoretic View”, IEEE Journal On Selected Areas In Communications, Vol. 20, No. 9, December 2002
r(t) =pEp
LXl=1
αl p(t− τl) + n(t)p(t)

23
45
D. Dardari, WiLAB, University of Bologna
TOA Estimation in Multipath Environments
Received signal
r(t) =pEp
LXl=1
αl p(t− τl) + n(t)
Problem formulation
• we are interested in the estimation of the ToA, τ = τ1, of the direct path byobserving the received signal r(t) within the observation interval [0, Tob);
• we consider τ to be uniformly distributed in the interval [0, Ta), withTa < Tob;
• set of nuisance parameters U = {τ2, τ3, . . . , τL,α1,α2, . . . ,αL}
46
D. Dardari, WiLAB, University of Bologna
CRB and ZZB for TOA Estimation with Multipath
5 10 15 20 25SNR (dB)
10-12
10-11
10-10
10-9
10-8
RM
SE
(s)
CRB ZZB, CM1ZZB, CM4ZZB, CM5
Using the IEEE802.15.4a channel model
D. Dardari, A. Conti, U. Ferner, A. Giorgetti, and M. Z. Win, “Ranging with Ultrawide Bandwidth Signals in MultipathEnvironments”, Proc. of IEEE (Special Issue on UWB Technology & Emerging Applications), Feb. 2009.

24
47
D. Dardari, WiLAB, University of Bologna
ZZB for TOA Estimation using Measured Data
0 5 10 15 20 25 30SNR (dB)
10-12
10-11
10-10
10-9
10-8
10-7
RM
SE
(s)
LOS (Rx2)LOS (Rx3)NLOS (Rx4)NLOS (Rx5)NLOS (Rx6)NLOS (Rx7)NLOS (Rx8)
D. Dardari, C.-C. Chong, and M. Z. Win, “Improved lower bounds on time-of-arrival estimation error in realistic UWB channels,” in IEEE International Conference on Ultra-Wideband, ICUWB 2006, (Waltham, MA, USA), pp. 531–537, Sept. 2006.
C. –C. Chong and S. K. Yong, “A generic statistical based UWB channel model for high-rise apartments,” IEEE Trans. Antennas and Propagation, vol. 53, no. 8, pp. 2389-2399, Aug. 2005.
high-rise apartment
48
D. Dardari, WiLAB, University of Bologna
ML TOA Estimator in Multipath Environments
Problems:• Implementation at Nyquist sampling rate or higher difficult with UWB
signals• High complexity
looking for sub-optimal schemes
The ML estimate of τ is τ̂ = argmaxτ̃
{χH(τ̃ )R−1(τ̃ )χ(τ̃ )}, where R(τ ) is theautocorrelation matrix of p(t) and
χ(τ ) ,Z Tob
0
r(t)
⎡⎢⎢⎢⎢⎢⎢⎣p(t− τ1)p(t− τ2)
.
.
.p(t− τL)
⎤⎥⎥⎥⎥⎥⎥⎦ dt
When channel parameters are unknown, TOA estimation in multipath environ-ments is closely related to channel estimation, where path amplitudes and TOAτ = [τ1, τ2, . . . , τL]
T are jointly estimated using, for example, a ML approach

25
49
D. Dardari, WiLAB, University of Bologna
Reducing the Estimator Complexity
Examples:
-Sub-optimal ML
-Generalized ML
-Simple thresholding
-Multi-resolution
-Delay & average (noisy template)
-Two-stages approaches
-Energy detection based
-……………………
50
D. Dardari, WiLAB, University of Bologna
Algorithmstested
Lower complexity
Higher complexity
Simple thresholding, peak detection
Iterative cancellation techniques (to deal with paths overlapping)
Main observations:
-There is no a large performance difference between simple and complex algorithms considered (especially at medium and large SNRs)
-Ranging resolutions on the order of 10cm are achievable!
Decreasing SNR
Performance in Realistic EnvironmentsResults from: C. Falsi, D. Dardari, L. Mucchi, and M. Z. Win, “Time of arrival estimation for UWB localizers in realistic environments,” EURASIP J. Appl. Signal Processing (Special Issue on Wireless Location Technologies and Applications), 2006.

26
51
D. Dardari, WiLAB, University of Bologna
Sub-Nyquist Sampling Rate TOA Estimators
TOA estimators based on energy detection (ED) can operate at sub-Nyquist sampling rate low complexity
The TOA resolution is bounded by the ED integration time
• T[.]: pre-processing filter– to improve the first path detection– to mitigate the effect of the interference
• First path detector: several algorithms can be adopted
Asymptotic MSE = T 2int/12
52
D. Dardari, WiLAB, University of Bologna
Example of ranging preamble structure
Each user has a different time-hopping sequenceto allow multi-user communication

27
53
D. Dardari, WiLAB, University of Bologna
ED-based TOA estimation algorithms
• Simple thresholding• P-MAX• Backward search• Jump Back and Search Forward• ………
Collected energy vector
Possible algorithms
54
D. Dardari, WiLAB, University of Bologna
Simple thresholding
Decision vector
Detect the time slot within the observation interval that contains the first pathby comparing each element of {zk} to a fixed threshold η.The first threshold crossing event is taken as the estimate of the TOA
The optimum choice of η depends on channel statistics and SNR:
• Small η → high probability of early detection prior to the first path (earlyTOA estimation) due to noise and interference
• Large η→ low probability of detecting the first path and a high probabilityof detecting an erroneous path (late TOA estimation) due to fading

28
55
D. Dardari, WiLAB, University of Bologna
P-Max
Decision vector
The P-Max criteria is based on the selection of the earliest sample among theP largest in {zk}.
TOA estimation performance depends on the parameter P , where P can beoptimized according to received signal characteristics
- D. Dardari, C.-C. Chong, and M. Z. Win, “Analysis of threshold-based ToA estimators in UWB channels,” in European Signal Processing Conference, EUSIPCO 2006, Florence, ITALY, Sep. 2006.
56
D. Dardari, WiLAB, University of Bologna
Backward Search
Decision vector
The search begins from the largest sample in {zk}, with index kmax, and thesearch proceeds element by element backward in a window of length Wsb untilthe sample-under-test goes below the threshold η
- I. Guvenc and Z. Sahinoglu, “Threshold-based TOA estimation for impulse radio UWB systems,” in Proc. IEEE Int. Conf. on Utra-Wideband (ICU), Zurich, Switzerland, Sep 2005, pp. 420–425.

29
57
D. Dardari, WiLAB, University of Bologna
Jump Back and Search Forward
Decision vector
The leading edge of the signal is searched element-by-element in a window oflength Wsb samples preceding the strongest one.The search proceeds forward until the sample-under-test crosses the threshold
The optimal selection ofWsb and η depend on the received signal characteristics
58
D. Dardari, WiLAB, University of Bologna
10 15 20 25 30 35 40SNR (dB)
10-10
10-9
10-8
10-7
RM
SE
(s)
MAX
P-Max, P=3
JBSF, Wsb=20
Simple Thresholding
SBS, Wsb=20
SBSMC, Wsb=30, D=5
Performance comparison between TOA est. techniques
From: D. Dardari, A. Conti, U. Ferner, A. Giorgetti, and M. Z. Win, “Ranging with Ultrawide Bandwidth Signals in Multipath Environments”, Proc. of IEEE (Special Issue on UWB Technology & Emerging Applications), Feb, 2009.
Error floor
Signal bandwidth 1.6 GHzCenter frequency 4 GHzED integration time 2 nsPreamble length 400 pulsesFrame duration 120 nsIEEE802.15.4a (CM4)channel model
Tint/√12

30
59
D. Dardari, WiLAB, University of Bologna
Interference effects
UWB systems are expected to work in coexistence with other UWBand narrowband systems as an underlying technology
Both wideband interference (WBI) and narrowband interference (NBI)can be present and degrade the ToA estimation
Either non-linear and linear 2D filtering techniques can be applied to mitigate the effect of the interference
- Z. Shainoglu and I. Guvenc, “Multiuser interference mitigation in noncoherent UWB ranging via nonlinear filtering,” EURASIP J. Wireless Communications and Networking, vol. 2006, pp. 1–10, 2006.
- D. Dardari, A. Giorgetti, and M. Z. Win, “Time-of-arrival estimation in the presence of narrow and wide bandwidth interference in UWB channels,” in IEEE International Conference on Ultra-Wideband, ICUWB 2007, Singapore, Sep. 2007.
60
D. Dardari, WiLAB, University of Bologna
Interference Mitigation Techniques
Min Filter
Min Filter+Differential Filter
Each column of {vn,k} can be processed as follows
zk =
Nt−HXn=0
min{vn,k, vn+1,k, . . . , vn+H−1,k},
where k = 0, . . . ,K − 1, and H is the length of the filter.
To improve the estimation performance in the presence of both NBI and WBI,the min filter is first applied to each matrix column to produce the intermediatevector {z̃k}.The vector {z̃k} is further processed (differential filter) as follows
zk = z̃k − z̃k+1, k = 0, . . . , K − 1 ,with z̃K = 0.

31
61
D. Dardari, WiLAB, University of Bologna
Energy matrix filtering examples
First step: after the min filterBefore filtering
Second step:
after the differential filter
True ToA
True ToA
True ToA
WBI+NBI
62
D. Dardari, WiLAB, University of Bologna
10 15 20 25 30 35 40SNR (dB)
10-10
10-9
10-8
10-7
RM
SE (s
)
Averaging filterDifferential filterMin filterMin & differential filters
w/o interf.
NBI & MUI
Performance of the threshold-based estimator with different 2D filtering tech-niques in the presence of both NBI, INR = 35 dB, and WBI, SIR = −15 dB.
Nsym = 400: preamble length.
From D. Dardari, A. Giorgetti, and M. Z. Win, “Time-of-arrival estimation in the presence of narrow and wide bandwidth interference in UWB channels,” in IEEE International Conference on Ultra-Wideband, ICUWB 2007, Singapore, Sep. 2007.
Performance comparison between mitigation techniques

32
63
D. Dardari, WiLAB, University of Bologna
NLOS condition: extra propagation delay (1/2)
D. Dardari, A. Conti, J. Lien, and M. Z. Win, “The effect of cooperation in UWB based positioning systems usingexperimental data,” EURASIP Journal on Advances in Signal Processing, Special Issue on Cooperative Localization inWireless Ad Hoc and Sensor Networks, 2008.
The extra delay ∆τ introduced by a homogeneous material with thickness dWis given by
∆τ = (√²r − 1)
dWc
where ²r is the relative electrical permittivity of the material.
64
D. Dardari, WiLAB, University of Bologna
Extra propagation delay effect leads to biased estimations, typically some nanoseconds
Possible solutions:
• larger number of anchor nodes
• knowledge of some a priori information (e.g., scenario layout)
• cooperation among nodes
Ranging error on the order of 50 cm!
NLOS condition: extra propagation delay (2/2)

33
65
D. Dardari, WiLAB, University of Bologna
Ranging in the IEEE802.15.4a standard (1/2)
• Ranging is optional (UWB PHY only)
• Main ranging protocol: Two-way TOA ranging (others possible)
• Private ranging protocol to protect against malicious devices (optional)
• Both coherent and non coherent estimation
Preamble
[16,64,1024,4096] symbols
Start of frame delimiter, SFD
[8,64] symbols
PHY header Data field
IEEE 802.15.4a packet structure
Preamble: acquisition, channel sounding and leading edge detectionSFD: frame synchronization, ranging counter management.
Designed to minimize the frame synchronization error
•The preamble and SFD lengths are specified by the application based on channel conditionsand receiver capabilities (coherent/non-coherent)
•The application bases its choice on figure of merit reports from PHY on good range measurement is
•Longer lengths are preferred for non-coherent receivers to improve SNR via processing gain
66
D. Dardari, WiLAB, University of Bologna
Ranging in the IEEE802.15.4a standard (2/2)
• Each symbol is composed of a ternary sequence taken from a set of 8 sequences
• Each ternary sequence, and its non coherent version, has ideal periodic autocorrelation function (no side lobes) so that what is observed at the receiver is only the channel response
Example of one the 8 possible length-31 ternary sequence
[-000+0-0+++0+-000+-000+-+++00-+0-00]
Autocorrelation function

34
67
D. Dardari, WiLAB, University of Bologna
Some advanced issues
• Secure ranging• Cognitive ranging• Robust ranging (interference mitigation) • Passive ranging and localization• New generation RFID systems• ……….
68
D. Dardari, WiLAB, University of Bologna
Position estimation

35
69
D. Dardari, WiLAB, University of Bologna
Position Estimation
• Single-hop
• Multi-hop
• Range-free
• Anchor-free
70
D. Dardari, WiLAB, University of Bologna
Single-hop Localization
Multilateration
Consider the problem of determining the position (x,y) of an unknown node by using distance estimates di between the unknown node and a set of N anchor nodes (beacons) placed at known coordinates (xi, yi), with i 1, 2, . . . N . These estimates can be obtained, for example, through ToA or RSS measurements.
With ideal distance estimate the intersection of the circles corresponds to the position of the target node.
Problem statement
⎧⎪⎪⎨⎪⎪⎩(x1 − x)2 + (y1 − y)2 = d̂21
...
(xN − x)2 + (yN − y)2 = d̂2N .

36
71
D. Dardari, WiLAB, University of Bologna
The effect of ranging errors
In the presence of distance estimation error we have
The estimation error is usually modeled as a Gaussian r.v. with standard deviation function of the true distance d
d̂i = di + ²i where ²i represents the estimation error.
σ2 = σ20 · dα
72
D. Dardari, WiLAB, University of Bologna
The localization accuracy is influenced by:
• The geometry of the beacons with respect to the target
• The quality of the range measurements
(?) worse than
The effect of ranging errors

37
73
D. Dardari, WiLAB, University of Bologna
with
Quality of the measurementSensor geometry
It is a generalization of the geometric dilution of precision (GDOP).
The position error bound (PEB)
It is the CRB of the position estimation MSE
D. Jourdan, D. Dardari, and M. Z. Win, “Position error bound for UWB localization in dense cluttered environments,” IEEE Trans. Aerosp. Electron. Syst., vol. 44, no. 2, pp. 1–16, Apr. 2008.
74
D. Dardari, WiLAB, University of Bologna
Example

38
75
D. Dardari, WiLAB, University of Bologna
Practical position estimators
The target position estimate can be obtained using the ML approach, which is asymptotically efficient (i.e., for large SNR approaches the CRB).
Unfortunately, its solution poses several problems due to the presence of local maxima in the likelihood function and the need for goodranging error statistical models.
Sub-optimal estimators
76
D. Dardari, WiLAB, University of Bologna
A simple linear least square (LS) position estimator
• Some performance loss is present• Particular attention has to be paid in selecting the anchor node associated
to the last equation• Matrix inversion is required.
the system of equations can be linearized by subtracting the last equation from the first N-1 equations which creates a proper system of linear equations
Using the linear LS method:
⎧⎪⎪⎨⎪⎪⎩(x1 − x)2 + (y1 − y)2 = d̂21
...
(xN − x)2 + (yN − y)2 = d̂2N .
p̂(LS) = (AT A)−1AT b ,
A ,
⎡⎢⎣ 2(x1 − xN ) 2(y1 − yN )...
...2(xN−1 − xN ) 2(yN−1 − yN )
⎤⎥⎦ b ,
⎡⎢⎣ x21 − x2N + y21 − y2N + d̂2N − d̂21...
x2N−1 − x2N + y2N−1 − y2N + d̂2N − d̂2N−1
⎤⎥⎦ .

39
77
D. Dardari, WiLAB, University of Bologna
A low complexity estimator: Min-Max
A much simpler method, presented as a part of the N -hop multi-laterationalgorithm by Savvides et al. (2002) is Min-Max . The idea is to construct a bounding box starting from each known position (xi,yi) and distance measurement di. (approximates beacon ranges to squares)
The estimated position is obtained as the centre of the intersection of these bounding boxes computed by taking the maximum of all coordinate minimumsand the minimum of all maximums:
[maxi(xi − di),max
i(yi − di)]× [min
i(xi + di),min
i(yi + di)]
78
D. Dardari, WiLAB, University of Bologna
Multi-hop localization
In many cases a node has to estimate its position without a direct interaction with anchor nodes and a cooperation between nodes is needed in a multi-hop fashion
Design of anchor-based distributed and cooperative localization algorithms that can cope with unreliable range measurements
anchoranchor

40
79
D. Dardari, WiLAB, University of Bologna
Multi-hop localization
Most of multi-hop cooperative algorithms have a common 3-phase structure
•Phase 1 Determine the distances between unknowns and anchor nodes.
•Phase 2 Derive for each node a position from its anchor distances (using, for example, multilateration or Min-Max algorithms).
•Phase 3 Refine the node positions using information about the distance to, and positions of, neighbouring nodes.
80
D. Dardari, WiLAB, University of Bologna
N-Hop multilateration (Savvides, 2002)
A. Savvides, H. Park, M. Srivastava, The bits and flops of the n-hop multilateration primitive for node localization problems, First ACM Workshop on Wireless Sensor Networks and Application (WSNA), pp112-121, Atlanta GA, September 2002.
Anchor node
•The anchors send a beacon message including their identity, position and path length accumulator set to 0
•Each receiving node adds the measured range from the previous node to the path length field and broadcasts the new message to the other nodes
•If multiple messages about the same anchor are received, the node keeps and forwards only the one containing the minimum value of path length.
The distance to the anchors is simply determined by adding the ranges encountered at each hop during the network flood.

41
81
D. Dardari, WiLAB, University of Bologna
N-Hop multilateration
•Fully distributed algorithm
•Low complexity
•Range errors accumulate over multiple hops
•The cumulative error becomes significant in the presence of large networks with few anchors or poor ranging hardware
82
D. Dardari, WiLAB, University of Bologna
DV-hop multilateration (Niculescu & Nath, 2001)
The DV-hop algorithm is similar to the N -hop multilateration.
Here, the distance information is expressed in terms of number of hops to every anchor node.
To enable the conversion from number of hops and physical distance, anchor nodes evaluate the average single-hop distance, dhop, starting from the hop count information and known position of all other anchors inside the network
dhopi =
Pj
p(xi − xj)2 + (yi − yj)2P
j hi,j
where (xj , yj) and hi,j are, respectively, the position of the jth anchor node andthe distance, in hops, from anchor i to anchor j.

42
83
D. Dardari, WiLAB, University of Bologna
Performance comparison
From: Langendoen & Reijers, 2003
For example, DV-hop good for very bad or none range measurements
Best algorithm depends on:•error in range measurement (range variance)•connectivity•network topology•node capabilities
84
D. Dardari, WiLAB, University of Bologna
Iterative distributed localization
Nodes surrounding anchor nodes cooperatively establish position estimates that are successively propagated to more distant nodes, allowing them to estimate their position without direct anchor node visibility (Savarese, Rabaey & Beutel, 2001). At each iteration step, once a node with unknown position (x,y) bears N nodes with known or estimated positions, it would be able to estimate its position starting from the measured distances di and known positions (xi,yi) if N 3.
anchor
anchor
anchor
anchor
anchor
anchor
Step n Step n+1

43
85
D. Dardari, WiLAB, University of Bologna
Performance
•Multi-lateration gives the better precision only if the range measurement is very accurate •Anchor placement affects the performance
86
D. Dardari, WiLAB, University of Bologna
Range-free localization (1/2)
Problem statement
m anchor nodes are present with coordinates b= (x1,y1,x2,y2, . . . , xm,ym) and the positions x=(xm+1,ym+1, ……, xn,yn) of the remainder n-m nodes are unknown. The problem is to find x such that the proximity constraints are satisfied.
The radio connectivity model, which considers a circle with a fixed radius r0, is the simplest way to model the proximity constraint.

44
87
D. Dardari, WiLAB, University of Bologna
Range-free localization (2/2)
As the number of constraints increases, the feasible region of solutions for x, given by the intersection of individual constraints, becomes smaller.
Note that the DV-hop scheme is actually a range-free positioning algorithm since distance estimation between unknown and anchor nodes is performed by hop counting.
The work in Doherty, Pister & Ghaoui, 2001 presents a centralized methodology to solve this problem as a linear or semi-definite program. It is shown that the position estimation error can be dramatically reduced as the network connectivity increases.
88
D. Dardari, WiLAB, University of Bologna
Anchor-free localization (1/2)
Problem statement
given a set of nodes with unknown position and range measurements among neighbours’ nodes, determine the (relative) position coordinates of every node in the network.
NP-hard problemDistributed algorithms are appreciated

45
89
D. Dardari, WiLAB, University of Bologna
Anchor-free localization (2/2)
Anchor-free localization is analogous to find the resting point of masses (representing the nodes) connected by springs (with length proportional to distance measurements) (Patwari, Ash, Kyperountas, Hero, Moses & Correal, 2005). Springs exert forces on the nodes which move until stabilization.
The equilibrium point of masses represents a minimum-energy localization estimate.
90
D. Dardari, WiLAB, University of Bologna
Position tracking

46
91
D. Dardari, WiLAB, University of Bologna
Position tracking
Given the actual and previous estimated positions, besides forbidden location configurations (e.g., inside buildings), there are also forbidden time configurations, for example the node cannot suddenly move fromone room to another one.
Position tracking algorithms, in addition to range measurements,take into account the system memory as well as a node mobility modelto achieve better position estimation accuracy.
92
D. Dardari, WiLAB, University of Bologna
Example: Bayesian Filters
( ) ( )1 1
1
(x ) x | x xx
t t t t
t
Bel p Bel−− −
−
= ∑
( ) ( )( ) ( )r | x
x xr
t tt t
t
pBel Bel
p−=
Posteriori prob. density conditioned on all sensor data available at time t
( ) ( )ttt pBel r,...,r,r|xx 21=
Filter update equations
( )x ,t t tx y=
Mobility
model Perceptual
model
RSSI
measurements
State prediction
State adjustment
( )1x | xt tp − ( )r | xt tp
(x )tBel− (x )tBel1(x )tBel −
System state (target position) at time t
rt

47
93
D. Dardari, WiLAB, University of Bologna
Case studies
94
D. Dardari, WiLAB, University of Bologna
Case studies
Case study 1
UWB-based indoor localization platformPurposes:
- to test techniques to mitigate the extra delay propagation effects- to test cooperative algorithms
Case study 2
WSN-based indoor localization platform (VICOM Project)Purposes:
- to test different RSS-based positioning and tracking techniques- to test advanced context aware applications
T. Pavani, G. Costa, M. Mazzotti, D. Dardari, and A. Conti, “Experimental results on indoor localization technique through wireless sensors network,” in Proc. IEEE Vehicular Tech. Conf. (VTC 2006-Spring), (Melbourne, AUSTRALIA), May 2006.
D. Dardari, A. Conti, J. Lien, and M. Z. Win, “The effect of cooperation in UWB based positioning systems usingexperimental data,” EURASIP Journal on Advances in Signal Processing, Special Issue on Cooperative Localization inWireless Ad Hoc and Sensor Networks, 2008.

48
95
D. Dardari, WiLAB, University of Bologna
Case study 1: the scenario considered
The measurement environment at the WiLAB, University of Bologna, Italy. Coordinates are expressed in centimeters
96
D. Dardari, WiLAB, University of Bologna
The UWB ranging equipment
• N = 5 fixed UWB beacons (tx1-5) was deployed to localize one or more UWB targets.
• Each ranging device, placed 88 cm above the ground, consisted of one Time-Domain PulseOn 210 UWB radio operating in the 3.2-7.4 GHz 10dB RF bandwidth.
• These commercial radios are equipped to perform ranging by estimating the ToA of the first path using a thresholding technique
• A grid of 20 possible target positions (numbered 1-20) defined the points from which range (distance) measurements were taken at 76 cm height. For each target position, 1, 500 range measurements were collected from each beacon.

49
97
D. Dardari, WiLAB, University of Bologna
Extra delay propagation characterization (1/2)
The measurement environment at the WiLAB, University of Bologna, Italy. Coordinates are expressed in centimeters
D. Dardari, A. Conti, J. Lien, and M. Z. Win, “The effect of cooperation in UWB based positioning systems usingexperimental data,” EURASIP Journal on Advances in Signal Processing, Special Issue on Cooperative Localization inWireless Ad Hoc and Sensor Networks, 2008.
98
D. Dardari, WiLAB, University of Bologna
Extra delay propagation characterization (2/2)
Wall Extra Delay (WED) model
- Ei is the total time delay caused by NLOS conditions- Wk is the number of walls introducing the same extra delay value ∆k (i.e. the number of walls of the same material and thickness)- Ne is the number of different extra delay values.
It can be adopted to correct range measurements once the environment layout is known

50
99
D. Dardari, WiLAB, University of Bologna
Extra propagation delay mitigation
- LS positioning algorithm with 5 beacons
• A two-step LS positioning algorithmincorporating the WED model is introduced to correct the range measurements in NLOS conditions when the layout of the environment is known.
D. Dardari, A. Conti, J. Lien, and M. Z. Win, “The effect of cooperation in UWB based positioning systems usingexperimental data,” EURASIP Journal on Advances in Signal Processing, Special Issue on Cooperative Localization inWireless Ad Hoc and Sensor Networks, 2008
100
D. Dardari, WiLAB, University of Bologna
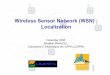
Position estimation RMSE
RMSE as a function of target position in the absence and presence of priori information (i.e. with bias and after removing bias, respectively). N = 5 beacons are considered.

51
101
D. Dardari, WiLAB, University of Bologna
Position estimation theoretical bound
PEB as a function of target position with 3 and 5 beacons
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21node ID
0
20
40
60
80
100
120
140
160
180
200
220
240
260
280
300
320
PE
B [c
m]
5 beacons3 beacons
102
D. Dardari, WiLAB, University of Bologna
Set up for Cooperative Localization

52
103
D. Dardari, WiLAB, University of Bologna
The effect of cooperation
104
D. Dardari, WiLAB, University of Bologna
Virtual Immersive Communication (VICOM) is an Italian FIRB project, funded by the MIUR (about 12MEuro), started in November 2002 and ended in 2006. Project partners include 16 Italian universities.
-Basic research-Applied research using current technology (two demonstrators developed)
The VICOM Project
Case Study 2: WSN-based localization platform

53
105
D. Dardari, WiLAB, University of Bologna
The VICOM Project
The aim of the Virtual Immersive Communications (VICOM) project is to study and develop techniques, protocols and applications for the Virtual Immersive Telepresence (VIT). The realization and the evaluation of two demonstrators is an integral part of the project.
Typical applications of Intelligent Environment try to create an “intelligent space” in which the user is ”immersed” maximizing the efficiency in performing his tasks.
To provide the “immersivity” we assume that the user has a wireless mobile reconfigurable device with virtual assistant functionality (“Digital me”).
106
D. Dardari, WiLAB, University of Bologna
•Wireless sensor network (WSN) based localization platform set-up
•Localization algorithms design & test
•User applications:•2D multiuser guide•Audio/video conference•Messaging
•Ambient server
Demonstrator development activity at WiLAB

54
107
D. Dardari, WiLAB, University of Bologna
• Planning, deployment and test of sensors (Crossbow Mica2dot)
• Measurement campaign in some test-points:– Precise evaluation of the
radio channel characteristics
– Creation of a data-base for future off-line algorithms test and optimization
• Real-time test of the localization algorithms based on RSS measurements
Field trial at Ministero delle Comunicazioni – Roma
WSN-based localization platform
108
D. Dardari, WiLAB, University of Bologna
-100-90-80-70-60-50-40-30-20-10
00,00 5,00 10,00 15,00 20,00 25,00 30,00
Distance (m)
RSS
I (db
m)
Anchor nodes deployment
System configuration
Localization test and data collection
Platform set-up

55
109
D. Dardari, WiLAB, University of Bologna
Higher-complexity location algorithm: Bayesian Filters
Mobility model
Perception model
Mobility and perception models
110
D. Dardari, WiLAB, University of Bologna
Localization Accuracy
00,10,20,30,40,50,60,70,80,9
1
00.
30.
60.
91.
21.
51.
82.
12.
42.
7 33.
33.
63.
94.
24.
54.
8Al
tro
Error (m)
CD
F Er
ror
MinMaxBayesian Filter
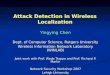
Algorithms comparison: Min-Max vs. Bayesian Filter
Results: precision 1-2 meters, accuracy >90% can be achieved

56
111
D. Dardari, WiLAB, University of Bologna
Indoor/outdoor multiuser
2D guide
Main capabilities:• multiuser support• orientation• pathfinding• automatic map switching between indoor and outdoor
Example of application developed
112
D. Dardari, WiLAB, University of Bologna
Important “hot” topics
• Cooperative localization• Secure ranging & localization• Robust ranging • Cognitive ranging & localization• Distributed localization algorithms• Fundamental performance limits of multi-hop
and anchor-free positioning in the presence of unreliable measurements
• Definition of reference scenarios• Interference mitigation• …………….

57
113
D. Dardari, WiLAB, University of Bologna
Some recent books and special issues
-EURASIP Journal on Advances in Signal Processing, Special Issue on Cooperative Localization in Wireless Ad Hoc and Sensor Networks, 2008.
Guest editors: D. Dardari, D. Jourdan, C-C. Chong, L. Mucchi
- Proc. of IEEE - Special Issue on UWB Technology & Emerging Applications -, Feb. 2009.Guest editors: A. Molisch, J. Zhang, M. Win, D. Dardari, W. Weisbeck
R. Verdone, D. Dardari, G. Mazzini, A. ContiWireless Sensors and Actuator Networks: Technologies, Analysis and Design, Elsevier, 2008
- D. Dardari, A. Conti, U. Ferner, A. Giorgetti, and M. Z. Win, “Ranging with UltrawideBandwidth Signals in Multipath Environments”, Proc. of IEEE (Special Issue on UWB Technology & Emerging Applications), Feb. 2009.
- Z. Sahinoglu, S. Gezici, I. Guvenc, “Ultra-wideband positioning systems: theoretical limits, ranging algorithms, and protocols”, Cambridge University press, 2008.
114
D. Dardari, WiLAB, University of Bologna
Selected references
D. Dardari, A. Conti, U. Ferner, A. Giorgetti, and M. Z. Win, “Ranging with Ultrawide Bandwidth Signals in MultipathEnvironments”, Proc. of IEEE (Special Issue on UWB Technology & Emerging Applications), Feb. 2009.
I. Guvenc and Z. Sahinoglu, “Threshold-based TOA estimation for impulse radio UWB systems,” in Proc. IEEE Int. Conf. on Utra-Wideband (ICU), Zurich, Switzerland, Sep 2005, pp. 420–425.
S. Gezici, Z. Tian, G. B. Giannakis, H. Kobayashi, A. F. Molisch, H. V. Poor, and Z. Sahinoglu, “Localization via ultra-wideband radios: a look at positioning aspects for future sensor networks,” IEEE Signal Processing Mag., vol. 22, pp. 70–84, Jul. 2005.
D. Dardari, C.-C. Chong, and M. Z. Win, “Improved lower bounds on time-of-arrival estimation error in realistic UWB channels,” in IEEE International Conference on Ultra-Wideband, ICUWB 2006, (Waltham, MA, USA), pp. 531–537, Sept. 2006.
R. Verdone, D. Dardari, G. Mazzini, A. Conti, Wireless Sensors and Actuator Networks: Technologies, Analysis and Design, Elsevier, 2008
Z. Sahinoglu, S. Gezici, I. Guvenc, “Ultra-wideband positioning systems: theoretical limits, ranging algorithms, and protocols”, Cambridge University press, 2008.
D. Dardari, C.-C. Chong, and M. Z. Win, “Threshold-based time-of-arrival estimators in UWB dense multipath channels,”IEEE Trans. Commun., vol. 56, no. 8, Aug. 2008.
D. Dardari, A. Giorgetti, and M. Z. Win, “Time-of-arrival estimation in the presence of narrow and wide bandwidth interference in UWB channels,” in IEEE International Conference on Ultra-Wideband, ICUWB 2007, Singapore, Sep. 2007.
Z. Shainoglu and I. Guvenc, “Multiuser interference mitigation in noncoherent UWB ranging via nonlinear filtering,”EURASIP J. Wireless Communications and Networking, vol. 2006, pp. 1–10, 2006.

58
115
D. Dardari, WiLAB, University of Bologna
Selected references
D. Dardari, A. Conti, J. Lien, and M. Z. Win, “The effect of cooperation in UWB based positioning systems usingexperimental data,” EURASIP Journal on Advances in Signal Processing, Special Issue on Cooperative Localization inWireless Ad Hoc and Sensor Networks, 2008.
C. Falsi, D. Dardari, L. Mucchi, and M. Z. Win, “Time of arrival estimation for UWB localizers in realistic environments,”EURASIP J. Appl. Signal Processing (Special Issue on Wireless Location Technologies and Applications), 2006.
P. Cheong, A. Rabbachin, J. Montillet, K. Yu, and I. Oppermann, “Synchronization, TOA and position estimation forlow-complexity LDR UWB devices,” in Proc. of IEEE Int. Conf. on Ultra-Wideband (ICUWB), Zurich, SWITZERLAND,Sep 2005, pp. 480–484.
J.-Y. Lee and R. A. Scholtz, “Ranging in a dense multipath environment using an UWB radio link,” IEEE J. Sel. AreasCommun., vol. 20, no. 9, pp. 1677–1683, Dec. 2002.
Y. Shen and M. Z. Win,“Effect of path-overlap on localization accuracy in dense multipath environments,” in Proc. IEEE Int. Conf. on Commun., Beijing, CHINA, May 2008.
Y. Shen and M. Z. Win, “Fundamental limits of wideband localization accuracy via Fisher information,” in Proc. IEEEWireless Commun. and Networking Conf., Kowloon, HONG KONG, Mar. 2007, pp. 3046–3051.
B. Alavi and K. Pahlavan, “Modeling of the TOA-based distance measurement error using UWB indoor radiomeasurements,” IEEE Commun. Lett., vol. 10, no. 4, pp. 275–277, Apr. 2006.
116
D. Dardari, WiLAB, University of Bologna
Selected references
C.-C. Chong and S. K. Yong, “A generic statistical-based UWB channel model for high-rise apartments,” IEEE Trans.Antennas Propag., vol. 53, pp. 2389–2399, 2005.
D. Cassioli, M. Z. Win, and A. F. Molisch, “The ultra -wide bandwidth indoor channel: from statistical model tosimulations,” IEEE J. Sel. Areas Commun., vol. 20, no. 6, pp. 1247–1257, Aug. 2002.
A. F. Molisch, D. Cassioli, C.-C. Chong, S. Emami, A. Fort, B. Kannan, J. Karedal, J. Kunisch, H. Schantz, K. Siwiak,and M. Z. Win, “A comprehensive standardized model for ultrawideband propagation channels,” IEEE Trans. AntennasPropag., vol. 54, no. 11, pp. 3151–3166, Nov. 2006, Special Issue on Wireless Communications.
M. Z. Win and R. A. Scholtz, “Impulse radio: How it works,” IEEE Commun. Lett., vol. 2, no. 2, pp. 36–38, Feb. 1998.
“IEEE standard for information technology - telecommunications and information exchange between systems - local andmetropolitan area networks - specific requirement part 15.4: Wireless medium access control (MAC) and physical layer(PHY) specifications for low-rate wireless personal area networks (WPANs),” IEEE Std 802.15.4a-2007 (Amendment toIEEE Std 802.15.4-2006), pp. 1–203, 2007.
Moe Z. Win, and Robert A. Scholtz, “Characterization of Ultra-Wide Bandwidth Wireless Indoor Channels: A Communication-Theoretic View”, IEEE Journal On Selected Areas In Communications, Vol. 20, No. 9, December 2002

59
117
D. Dardari, WiLAB, University of Bologna
Selected references
M. Maroti, P. Völgyesi, S. Dora, B. Kusy, A. Nadas, A. Ledeczi, G. Balogh, and K. Molnar, “Radio interferometricgeolocation,” in Proc. ACM Conference on Embedded Networked Sensor Systems, San Diego, USA, Nov. 2005, pp. 1–12.
B. Zhen, H.-B. Li, and R. Kohno, “Clock management in ultra-wideband ranging,” Proc. IST Mobile and WirelessCommun. Summit, pp. 1–5, Jul. 2007.
F. Sivrikaya and B. Yener, “Time synchronization in sensor networks: a survey,” IEEE Netw., vol. 18, no. 4, pp. 45–50,2004.
Y. Jiang and V. Leung, “An asymmetric double sided two-way ranging for crystal offset,” Int. Symp. on Signals, Systemsand Electronics (ISSSE), pp. 525–528, July 30 2007-Aug. 2 2007.
I. Guvenc, C.-C. Chong, and F. Watanabe, “NLOS identification and mitigation for UWB localization systems,” in Proc.IEEE Wireless Commun. and Networking Conf., Kowloon, HONG KONG, Mar. 2007, pp. 1571–1576.
C.-C. Chong, F. Watanabe, and M. Z. Win, “Effect of bandwidth on UWB ranging error,” in Proc. IEEE Wireless Commun. and Networking Conf., Kowloon, HONG KONG, Mar. 2007, pp. 1559–1564.
W. Suwansantisuk and M. Z. Win, “Multipath aided rapid acquisition: Optimal search strategies,” IEEE Trans. Inf. Theory, vol. 53, no. 1, pp. 174–193, Jan. 2007.
H. L. Van Trees, Detection, Estimation, and Modulation Theory, 1st ed. New York, NY 10158-0012: John Wiley &Sons, Inc., 1968.
D. Chazan, M. Zakai, and J. Ziv, “Improved lower bounds on signal parameter estimation,” IEEE Trans. Inf. Theory,vol. 21, no. 1, pp. 90–93, Jan. 1975.
118
D. Dardari, WiLAB, University of Bologna
Selected references
J. Zhang, R. A. Kennedy, and T. D. Abhayapala, “Cramer-rao lower bounds for the synchronization of UWB signals,” in EURASIP Journal on Wireless Communications and Networking, vol. 3, 2005.
V. Lottici, A. D’Andrea, and U. Mengali, “Channel estimation for ultra-wideband communications,” IEEE J. Sel. AreasCommun., vol. 20, no. 9, pp. 1638–1645, Dec. 2002.
H. Zhan, J. Ayadi, J. Farserotu, and J.-Y. Le Boudec, “High-resolution impulse radio ultra wideband ranging,” Proc. ofIEEE Int. Conf. on Ultra-Wideband (ICUWB), pp. 568–573, Sep. 2007.
S. H. Song and Q. T. Zhang, “Multi-dimensional detector for UWB ranging systems in dense multipath environments,”IEEE Trans. Wireless Commun., vol. 7, no. 1, pp. 175–183, 2008.
A. Rabbachin, I. Oppermann, and B. Denis, “ML time-of-arrival estimation based on low complexity UWB energydetection,” in Proc. of IEEE Int. Conf. on Ultra-Wideband (ICUWB), Waltham, MA, Sep. 2006, pp. 599–604.
A. A. D’Amico, U. Mengali, and L. Taponecco, “Energy-based TOA estimation,” IEEE Trans. Wireless Commun., vol. 7,no. 3, pp. 838–847, March 2008.
Z. Lei, F. Chin, and Y.-S. Kwok, “UWB ranging with energy detectors using ternary preamble sequences,” in Proc. IEEEWireless Commun. and Networking Conf., vol. 2, Las Vegas, NE, USA, Apr 2006, pp. 872–877.
Z. Tian and G. B. Giannakis, “A GLRT approach to data-aided timing acquisition in UWB radios-Part I: Algorithms,”IEEE Trans. Wireless Commun., vol. 4, no. 6, pp. 1536–1576, Nov. 2005.

60
119
D. Dardari, WiLAB, University of Bologna
Selected references
C. Mazzucco, U. Spagnolini, and G. Mulas, “A ranging technique for UWB indoor channel based on power delay profileanalysis,” in Proc. IEEE Semiannual Veh. Technol. Conf., vol. 5, Milan, ITALY, May 2004, pp. 2595–2599.
L. Yang and G. B. Giannakis, “Timing ultra-wideband signals with dirty templates,” IEEE Trans. Commun., vol. 53, no. 11, pp. 1952–1963, Nov. 2005.
C. Gentile and A. Kik, “A comprehensive evaluation of indoor ranging using ultra-wideband technology,” EURASIP J.Wireless Commun. and Networking, vol. 2007, no. 1, pp. 12–12, 2007.
D. Dardari, Y. Karisan, S. Gezici, A. A. D’Amico, and U. Mengali, “Performance limits on ranging with cognitive radio,”in International Workshop on Synergies in Communicaions and Localization (SyCoLo 2009), Dresden, Germany, June 2009.
D. Dardari, “Pseudo-random active UWB reflectors for accurate ranging,” IEEE Commun. Lett., vol. 8, no. 10, pp. 608–610, Oct 2004.
D. B. Jourdan, D. Dardari, and M. Z. Win, “Position error bound for UWB localization in dense cluttered environments,”IEEE Trans. Aerosp. Electron. Syst., vol. 44, no. 2, pp. 613–628, Apr. 2008.
E. Paolini, A. Giorgetti, M. Chiani, R. Minutolo and M. Montanari, “Localization Capability of Cooperative Anti-intruder Radar Systems,” EURASIP Journal on Advances in Signal Processing, (Special Issue on Cooperative Localization in Wireless
Ad Hoc and Sensor Networks), vol. 2008, Article ID 726854, 14 pages, 2008
120
D. Dardari, WiLAB, University of Bologna
Selected references
G. Mao, B. Fidan, B.D.O. Anderson, “Wireless sensor network localization techniques,” Computer Networks, Issue 51, 2007,Elseveir, pp. 2529-2553
H. Wymeersch, J.Lien, M.Win, “Cooperative Localization in Wireless Networks“, Proc. of the IEEE – S.I. on UWB Technology& Emerging Applications, Feb. 2009
D. B. Jourdan, D. Dardari, and M. Z. Win, “Position error bound for UWB localization in dense cluttered environments,” inIEEE Trans. on Aerospace and Electronic Systems, vol. 44, issue 2, April 2008, pp. 613-628.
M. Gavish, A.J .Weiss, “Performance analysis of bearing-only target location algorithms,” IEEE Trans. on Aerospace and El.Sys., Vol. 28, Issue 3, 1992, pp. 817-828
A. Savvides, H. Park, M. Srivastava, The bits and flops of the n-hop multilateration primitive for node localization problems,First ACM Workshop on Wireless Sensor Networks and Application (WSNA), pp112-121, Atlanta GA, September 2002.
D. Niculescu, B. Nath, Ad hoc positioning system (APS), IEEE Proc. of Globecom 2001, pp. 2926-2931.
C. Savarese, J.M. Rabaey, J. Beutel, Locationing in distributed ad-hoc wireless sensor networks, IEEE Proc. of ICASSP2001
L. Doherty, K.S.J. Pister, L. El Ghaoui, “Convex Position Estimation in Wireless Sensor Networks,” IEEE Proc. of INFOCOM2001
N. Patwari, J. N. Ash, S. Kyperountas, A. O. Hero, III, R. L. Moses, and N. S. Correal, “Locating the nodes: cooperativelocalization in wireless sensor networks,” IEEE Signal Processing Magazine, vol. 22, no. 4, 54 pages, 2005.

61
121
D. Dardari, WiLAB, University of Bologna
Selected references
J. J. Caffery, Jr., “A new approach to the geometry of TOA location,” in Proceedings of the 52nd IEEE Vehicular Technology Conference (VTC ’00), vol. 4, p. 1943, Boston, Mass, USA, September 2000.
D. Dardari and A. Conti, “A sub-optimal hierarchical maximum likelihood algorithm for collaborative localization in ad-hocnetwork,” in Proceedings of the 1st Annual IEEE Communications Society Conference on Sensor and Ad HocCommunications and Networks (SECON ’04), p. 425, Santa Clara, Calif, USA, October 2004.
T. Pavani, G. Costa, M. Mazzotti, D. Dardari, and A. Conti, “Experimental results on indoor localization technique throughwireless sensors network,” in Proc. IEEE Vehicular Tech. Conf. (VTC 2006-Spring), (Melbourne, AUSTRALIA), May 2006.
D.Dardari, A.Conti, J.Lien, M.Win, “The Effect of Cooperation on Localization Systems Using UWB Experimental Data“,EURASIP Journal on Advances in Signal Processing - S.I. on Cooperative Localization in Wireless Ad Hoc and SensorNetworks, 2008
I. Guvenc, C.-C. Chong, and F. Watanabe, “Analysis of a linear least-squares localization technique in LOS and NLOSenvironments,” in Proceedings of the 65th IEEE Vehicular Technology Conference (VTC ’07), p. 1886, Dublin, Ireland, April2007
A.Conti, D.Dardari, M.Win, “Experimental Results on Cooperative UWB Based Positioning Systems”, Proc. of ICUWB 2008
A.Conti, D.Dardari, L.Zuari, “Cooperative UWB Based Positioning Systems: CDAP Algorithm and Experimental”, Proc. ofIEEE ISSSTA 2008
122
D. Dardari, WiLAB, University of Bologna
Special thanks
O. Andrisano (University of Bologna, Italy)M. Chiani (University of Bologna, Italy)A. Conti (University of Ferrara, Italy)C-C. Chong (DoCoMo Labs, USA)C. Falsi (University of Florence, Italy)U. Ferner (MIT, USA)S. Gezici (Bilkent University, Turkey)A. Giorgetti (University of Bologna, Italy)J. Lien (JPL, Nasa, USA)D. Jourdan (Athera, Washington, USA)L. Mucchi (University of Florence, Italy)M. Z. Win (MIT, USA)
For further information please contact
Davide Dardari, [email protected]