Embed Size (px)
Citation preview

Router Level Flow Control in Data Networks
Stephan Bohacek
University of Southern California

• introduction• 1-hop controllers
– system description
– stability
– blocking
• 2-hop controllers– system description
– classical design methods (intuition)• hop over
• back pressure
• forward pressure
• time constant
– modern design methods• LQ
• L1
• distributed parameter
– stability• future work and conclusions
Outline

Objective: To avoid transmission of packets that will be dropped (best to drop packets at the entry point of the network).
For very high speed networks it might be better to use hop-by-hop flow control instead of end-to-end flow control.
Method: Control the router sending rates to ease and regulate network congestion.
Problem: Sending a packet that will be dropped is inefficient.

jijiji
ik
ikikj
jijii
qFqFrr
urrq
21,,
,,,,
otherwise
router to connects router if
0
1,
jiji
Queue dynamics
Link rate dynamics
one hop controller
pressure back applies
queue empties Parameters Control
2
1
F
F
Output - Inputiu
ijji ,, Let iqi router in size queue -
jir ji to router from rate ontransmissi - ,

CAACAC
BAABAB
AACABCABAA
qFqFrr
qFqFrr
urrrrq
21
21
Router B
one hop controller
CAr
ACr
ABr
Cq
Aq
BqAq
Au
BAr
Router C
Router A

sqFsqFs
sr
susrsrsq
jiji
kikik
jjijii
21,
,,,,
1
susqNFFs
ssq
12
1
ji
jiN
kki
ji
ji for
for
,
,
,
zero to sum columnsand rows
stable is from Mapping yu
stability of one hop controller

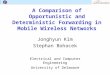
Blocking
Slow linkCongested router
A
B
C
D
E
• The data leaving A is destined for C.• The data leaving B is destined for D.• Link E-D is slow, so the queue in E fills.• Back pressure slows down both links A-E and B-E.• However, the link from E-C is high speed, hence the link A-E is slowed needlessly.

j. to travels then that i to h router from
travels that data the of part the is jih ,,
1,, j
jih Hence
two hop controller
BA
C
D
BAr ,
BACBA r ,,,
BADBA r ,,,
(queues in B are empty)

hihihjih
kkjkjkji
jijiji
hihjihjiji
tqFtqFt
tqFtqFt
tqFtqFtr
trttrtq
,6,5,,
,4,3,,
,2,1,
,,,,,
Queue Dynamics
Rate Controller
parameters Control - 654321 ,,,,, FFFFFF
two hop controller
How to set control parameters?
intuition vs. optimizationclassical vs. modern

CongestedRouter
Forward Pressure
Data
Control
Back Pressure 43 ,FF 65 ,FF

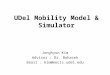
large - 1F As queue fills, out going data rates rapidly increase
small - 1F As queue fills, out going datarates slowly increase
jiji qr F ,1,
h
ihjihjiji rrq ,,,,,
1F of effect The
.1 F routers typical In
That is, the router sends data at the maximum rate whenever the queue is not empty.

0 200 400 600 800 1000 12000
0.1
0.2
queu
e si
ze
0 200 400 600 800 1000 12000
1
2
3
rate
s
time
A B C
Small 1F

0 200 400 600 800 1000 12000
0.05
0.1
queu
e si
ze
0 200 400 600 800 1000 12000
2
4
rate
s
time
A B C
Large 1F

k
kjkjkjiji tqFtqFttr ,4,3,,,
Back Pressure
A B C D
large 43 ,FF
• If queue C-D fills• Rate B-C slows• Queue B-C fills• Rate A-C slows• Queue A-C fills

constant input
Back Pressure

constant input
input
input
Back Pressure

0 1000 2000 3000 4000 5000 60000
0.2
0.4
queu
e si
ze
0 1000 2000 3000 4000 5000 60000
1
2
rate
s
time
Without Back Pressure

0 1000 2000 3000 4000 5000 60000
0.2
0.4
queu
e si
ze
0 1000 2000 3000 4000 5000 60000
1
2
rate
s
time
With Back Pressure

hihihjih
kkjkjkji
jijiji
qFqF
qFqF
qFqFr
,6,5,,
,4,3,,
,2,1,
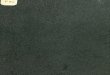
Forward Pressure
Forward Pressure

1. inputdata
2. queuefills
3. dataflows
4. queuefills
5. data flows rapidly- queue B-C is filling- queue A-C is filling
A B C
Forward Pressure
h
ihihjihji qFqFr ,6,5,,,

0 200 400 600 8000
0.05
0.1
0.15
0.2
queu
e si
ze
0 200 400 600 8000
1
2
3
rate
s
time
Without forward pressure

0 200 400 600 8000
0.05
0.1
0.15
0.2
queu
e si
ze
0 200 400 600 8000
1
2
3
rate
s
time
With forward pressure

00
Input
Input
Input
Input
Input
Output
Output
Output
Output
Output
1 2 3 4 5
6 7 8 9 10
11 12 13 14 15
16 17 18 19 20
21 22 23 24 25
Blocking

0
0
Input
Input
Input
Input
Input
Output
Output
Output
Output
Output
1 2 3 4 5
6 7 8 9 10
11 12 13 14 15
16 17 18 19 20
2122 23 24 25
Blocking

0
0
Input
Input
Input
Input
Input
Output
Output
Output
Output
Output
1 2 3 4 5
6 7 8 9 10
11 12 1314 15
1617
18 19 20
2122 23 24 25
Blocking

0
0
Input
Input
Input
Input
Input
Output
Output
Output
Output
Output
1 2 3 4 5
6 7 8 9 10
11 12 1314 15
1617
18 19 20
2122 23 24 25
Blocking

modern control methods(with truncation)
• optimal control with quadratic cost
• minimize peak queue/rate size
• distributed parameter

linear quadratic
0
22min tutqu
Quadratic Cost
uIr
qA
r
q
0
01 IXXBBXAXA TT
Let
022 XRX NLNL , with
control minimizing
r
qXItu 0
1
NLNLRA 22
sizes queue of vector - NLRq
rates data of vector - NLRr
input control - NLRu

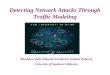
Show plot of gains
Note: gains decay, hence truncationLQ doesn’t make much use of back pressurelack of back pressure can be seen by the smallgains from 26-27, 26-19 and 26-33

0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
8 gains for hop 25 to 26
1 2 3 4 5 6 7
8 9 10 11 12 13 14
15 16 17 18 19 20 21
22 23 24 25 26 27 28
29 30 31 32 33 34 35
36 37 38 39 40 41 42
43 44 45 46 47 48 49
queu
e ga
ins
0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
8
1 2 3 4 5 6 7
8 9 10 11 12 13 14
15 16 17 18 19 20 21
22 23 24 25 26 27 28
29 30 31 32 33 34 35
36 37 38 39 40 41 42
43 44 45 46 47 48 49
rate
gai
ns 25,2425,2426,2526,2525,2425,2426,2526,2526,25 rrqqr

L1 Control methods
tv
tq
t
t
u max
maxmin
BvuIr
qA
r
q
0
data entering v
Objective: Minimize peakqueue size

0
00
IB
BZIVZAVI
AZ
T
TT
0
ZVZ
V
ZI
T
VZ ,
min
subject to
L1 Control methods

00
gains for hop 2 to 5
1 2 3
4 5 6
7 8 9
queu
e ga
ins
00
1 2 3
4 5 6
7 8 9
rate
gai
ns 3,23,22,12,13,23,22,12,15,2 rrqqr

00
gains for hop 5 to 2
1 2 3
4 5 6
7 8 9
queu
e ga
ins
00
1 2 3
4 5 6
7 8 9
rate
gai
ns
3,23,22,12,13,23,22,12,12,5 rrqqr

Note on previous slide, good back pressure, some forwardpressure. But no back pressure from 8-5. Why? These optimization procedures don’t always give intuitive answers.Is it that the optimization procedure is better, or doing somethingstupid.

Distributed Parameter Methods
1,1,
1,1,
,,,
,1,,,
65
43
21
itqKitqK
itqKitqK
itqKitqKitr
ituitritritq
Simple 1-D spatially invariant system
1,
1,
itr
itq itr
itq
,
, 1,
1,
itr
itq
I/OData Flow
ControlInformation
1, itv 1, itv

ituitritritq oo ,,,,
itqKitqK
itqKitqK
itqKitqKitr ooo
,,
,,
,,,
65
43
21
itritr
itqitq
o
o
,1,
,1,
itritr
itqitq
o
o
,1,
,1,
Temporal Dynamics
(only depends on local variables)
Spatial dynamics
Distributed Parameter Methods

0
0
0
0
,
,
0
0
0
0
,
,
,
,
,
,
,
,
,
,
,
,
,
,
22
1
itvK
itv
ituK
itu
itr
itq
itr
itq
itr
itq
itr
itq
itr
itq
itr
itq
Iz
zI
sIo
o
o
o
A
shift spatialbackward -
shift spatialforward -
derivative time -
1z
z
s
Distributed Parameter Methods

- Compact description of large system- Controllers will depend on local variables only
Requires systems be homogeneous. Extending it to nonhomogeneous systems may lead to computational difficulties.
advantages
disadvantages -
Distributed Parameter Methods

kji ,, varying of face the in Stability
r
qA
r
q
0Re Aseigenvalue
stability
kji
kji
totravled also will which to router
fromtravled that data of portion the is ,,
1,, k
kji k, some to goes eventually
j to i from travels that data all Since

kji ,, varying of face the in Stability

Note that there still are some slow eigenvalues.These are from alphas that result in data taking along time to get out of the network. That is, nonsensical alphas. It seems that making reasonable alphas is difficult
The previous network is 3 x 3, with K4 and K6 = 0

1
2 3
4
1,1,1 1,4,24,2,12,1,1 in
Has a pole at zero, integrator
sense. make not do Some P
1in
2in
4in
3in
kji ,, varying of face the in Stability

1
2 3
4
1
2 3
4
kjia ,,
Take the “sum” of possible input-output pairs.
These sums lead to sensible kjia ,,

kji ,, sensible for sEigenvalue

r
qA
r
q
kji ,, varying of face the in Stability
IXAXA T
NLNLRX 22 0X
?
stability

Future Directions
• characterization of alphas• simulation with TCP and CBR data• rigorous controller synthesis • rigorous stability and performance analysis
• investigation of differences between TCP and CBR traffic in such a network