-
Reduced-Order Shape Optimization Using Offset Surfaces
Przemyslaw Musialski∗ Thomas Auzinger∗ Michael Birsak∗ Michael
Wimmer∗ Leif Kobbelt†
∗Vienna University of Technology †RWTH Aachen University
constant inner o�setempty: unstable
�lled: unstable
optimized inner o�setempty: stable
�lled: unstable
optimized inner & outer o�setempty: stable�lled: stable
orig
inal
mod
el ©
htt
p://
ww
w.m
odel
plus
mod
el.c
om
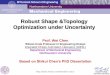
Figure 1: We introduce a method for reduced-order shape
optimization of 2-manifolds that uses offset surfaces to deform the
shape. Left: abottle model is generated using offset surfaces with
constant offsets. The resulting object is unable to stand. Center:
the offsets are optimizedsuch that the bottle can stand if empty,
however, if filled it is unstable. Right: the model is optimized to
stand both empty and filled. In orderto account for that, offset
surfaces are added inside and outside of the original shape.
Abstract
Given the 2-manifold surface of a 3d object, we propose a
novelmethod for the computation of an offset surface with varying
thick-ness such that the solid volume between the surface and its
offsetsatisfies a set of prescribed constraints and at the same
time min-imizes a given objective functional. Since the constraints
as wellas the objective functional can easily be adjusted to
specific appli-cation requirements, our method provides a flexible
and powerfultool for shape optimization. We use manifold harmonics
to derivea reduced-order formulation of the optimization problem,
whichguarantees a smooth offset surface and speeds up the
computationindependently from the input mesh resolution without
affecting thequality of the result. The constrained optimization
problem canbe solved in a numerically robust manner with commodity
solvers.Furthermore, the method allows simultaneously optimizing an
in-ner and an outer offset in order to increase the degrees of
freedom.We demonstrate our method in a number of examples where
wecontrol the physical mass properties of rigid objects for the
purposeof 3d printing.
CR Categories: I.3.5 [Computer Graphics]: Computational
Ge-ometry and Object Modeling—Curve, surface, solid, and
objectrepresentations
Keywords: geometry processing, geometric design
optimization,shape optimization, reduced-order models, physical
mass proper-ties, digital fabrication
1 Introduction
Today’s geometric modeling software (e.g., Blender) allows for
in-teractive design or customization of 3d geometric shapes, and
manyof them can now be fabricated at home using a low-cost
3d-printer.However, most such items are created in an ad-hoc
fashion, i.e.,their geometric and physical aspects are usually
assumed intuitivelyor determined empirically with a series of
trial-and-error iterations.While this might work well in some
cases, it can also turn into atedious and especially a costly
procedure. For this reason, in theapproaching age of personal
digital fabrication, there is a growingdemand for computational
tools that not only enable ordinary usersto design and 3d-print
their everyday objects, but also allow themto optimize their
designs for practical usability.
In this paper, we provide a novel method for shape optimization
ofgeometric objects defined by 2-manifold surface meshes. The
par-ticular problem we are dealing with is to find a new shape that
isas similar to an input shape as possible, but which at the same
timesatisfies various global goals. An example of such a goal is
depictedin Figure 1: the bottle is intended to stand upright in a
desired posi-tion when filled, however, it would fall over given
its current shape.In order to prevent this, our method
automatically adjusts the shapeof the object, but simultaneously,
it tries to preserve its volume,smoothness, and the overall
detailed appearance.
Technically, we formulate this task as a continuous
constrainedshape optimization problem, which balances shape
preservationagainst given design goals. We express the shape using
offset sur-faces—a simple yet powerful technique where the surface
is param-eterized by a vector of offset values applied to each
vertex in a cer-tain direction. This parameterization allows
deforming the surfaceboth locally and globally, depending on the
chosen displacements.We describe the details in Section 4.
Since we want to preserve the characteristics of the input
shapeunder deformations as well as possible, we favor displacements
ofthe interior surface of the object if feasible, and penalize
displace-ments of the outer surface explicitly. Additionally, and
most impor-tantly, we apply only low-frequency changes to the
shape, which isperceptually less noticeable than high-frequency
modifications, butstill has a large influence on global properties,
such as the object’svolume and thus mass.
-
Input GoalsInput Shape Preprocessing Optimization Output
Skeleton and VectorsBasis FunctionsSurface S Stand Upright min f
s.t. g S and S
Figure 2: Overview of our processing pipeline. The input is a
shape S and a desired goal, e.g., stable standing in a given pose.
In thepreprocessing stage, a set of manifold harmonic basis
functions Γk, a contracted skeleton mesh S̆, and a vector field V
are computed. In thenext stage, the surfaces are optimized with
respect to the given goals f and constraints gi, and finally, an
output shape S is generated.
In order to account for these requirements, we decompose the
ge-ometry of the input shape into its particular spectral bands
using themanifold harmonic basis [Vallet and Lévy 2008]. In our
context,this representation turns out to be remarkably versatile:
by project-ing the surface offsets into a subspace of this basis,
we obtain anefficient representation of low-frequency modifications
that, at thesame time, leave high-frequency details largely intact.
Moreover,this approach also serves as an intrinsic regularizer that
greatly low-ers the number of degrees of freedom, turning out to be
a powerfulorder-reduction technique of the otherwise highly
underdeterminedoptimization problem. We provide the details in
Section 5.
Our proposed solution is fast, lightweight, numerically stable,
andeasy to integrate into common 3d modeling software, making it
wellsuitable for practical optimization of global shape properties:
for in-stance, enforcement of mass moments [Bächer et al. 2014] or
struc-tural optimization [Lu et al. 2014]. While the latter usually
alsoinvolves the finite-element discretization of the shape and
needs tobe evaluated numerically, the former can be expressed as
integralsover the object’s surface. Since these can be elegantly
computedanalytically, we utilize them to demonstrate the
applicability of ourproposed reduced-order shape optimization
approach in Section 6.
In summary, our contributions are the following:
• We provide a flexible and robust novel framework for the
con-tinuous optimization of 2-manifold surfaces, which aims
tosatisfy global objectives by displacing an offset surface
de-rived from a given initial shape.
• We provide an elegant and efficient basis-reduction
approachthat is numerically robust and speeds up the computation
con-siderably by making the number of optimization variables
in-dependent of the mesh resolution.
• We demonstrate the applicability of our approach by
control-ling the mass properties of a rigid body enclosed between
aninner and an outer offset surface.
2 Related Work
Design Optimization Problems. Design optimization problemsaim at
the automatic computation of structural or mechanical de-signs that
suit some desired (global) goals. They have been stud-ied in
computational industrial design as form-finding problems,as well as
in statics and mechanical engineering as structural opti-mization
problems [Haftka and Gürdal 1992]. In computer graph-ics, recent
approaches provide algorithms for improving modelsfor 3d printing,
like the computation of structural stability [Stavaet al. 2012],
worst-case structural analysis [Zhou et al. 2013], cost-effective
material usage [Wang et al. 2013], or optimization of boththe
strength and weight of printed objects [Lu et al. 2014].
Various methods have been proposed that integrate
computationaldesign into interactive modeling tools in order to
solve specific
problems. For instance, interactive systems for various
manufactur-ing planning tasks, like garment editing [Umetani et al.
2011], de-sign of physically valid furniture [Umetani et al. 2012],
articulated3d-printed models [Bächer et al. 2012], mechanical
assemblies, liketoys [Zhu et al. 2012] and various moving
characters [Coros et al.2013; Thomaszewski et al. 2014], or
construction of inflatable bal-loons with desired shapes [Skouras
et al. 2012] have been proposed.Another example is material design,
where the specification of adesired deformation behavior can be
given a priori, and the com-posite material with respective elastic
behavior is computed by op-timization [Bickel et al. 2010]. This
approach was also extended tothe construction of balloons with
prescribed shape [Skouras et al.2012], and for the manufacturing of
synthetic clones of human faces[Bickel et al. 2012].
Reduced-Order Models. Order-reduction approaches aim atlowering
the dimensionality of the parametric space of a computa-tional
problem while preserving its input-output behavior as muchas
possible. Their goal is in general to gain performance. In thearea
of physically based deformation and animation, the idea ofusing
vibration modes of a body for order reduction has been pro-posed by
Pentland and Williams [1989]. This approach has beenfurther
explored for efficient interactive animation [Kim and James2009]
and shape deformation [von Tycowicz et al. 2013]. In geom-etry
processing, space and surface deformation methods based onskinning
between handles or cages are reduced-order approaches.The idea is
to express the problem with respect to few handles thatdefine a
subspace, and to interpolate or approximate the overall
de-formation [Botsch and Kobbelt 2004; Sumner et al. 2007;
Jacob-son et al. 2011]. In mesh processing, multi-resolution
modeling[Kobbelt et al. 1998] can be seen as an example of order
reduction.
Computation of Mass Properties. The computation of globalmass
properties has a long tradition in the modeling and CAD
com-munities, since from the beginning of computerized modeling,
ex-act parameters of modeled objects were of great importance for
an-imation, simulation, as well as manufacturing. Two early
workspioneered the idea to utilize Gauss’s Divergence Theorem for
thecomputation of mass moments of polyhedral objects [Messner
andTaylor 1980], and parametric bi-cubic spline patches [Timmer
andStern 1980]. Recently, it has been utilized for the optimization
ofmass properties of 3d-printed models [Prévost et al. 2013;
Bächeret al. 2014; Christiansen et al. 2015], which we also
demonstrate inthis paper.
3 Problem FormulationIn this section we present the general
concept of our shape opti-mization approach. The basic idea is to
interpret the shape as asolid enclosed between two surfaces, where
each can be deformedby the application of offsets with spatially
varying thickness.
Definitions and Notation. As input to our method, we expect a3d
shape represented as a closed oriented 2-manifold surface S =
-
(X,T), which in practice is a triangle mesh composed of n
verticesx ∈ X and a set of triangles T. Usually, the surface is the
boundaryof a solid body. Alternatively, the input can be an inner
and an outersurface enclosing a solid between them.
Depending on the desired optimization task, our method can
outputa single offset surface or two complementary offset surfaces,
oneoriented to the outside and one to the inside of the input
shape,where we denote the outer one as S, the inner one as S, or
bothtogether as S. For simplicity, we explain the concepts by using
theouter surface S, except where both surfaces are involved. Figure
2provides an overview.
Offset Surfaces. Each output surface is created by adding
anoffset value δ in a direction v at each surface vertex x, such
thatx = x + δv, where v ∈ V is a direction vector from a vector
fieldV, δ ∈ R is a scalar that provides the magnitude and the sign
ofthe shift, and x ∈ X is a vertex of the offset surface S. One
ob-vious choice for V would be the surface normal field N,
however,general offset surfaces are not limited to this choice, and
we use avector field derived from iterative surface contraction as
describedin Section 4.
In the following, the vertices x of a mesh are organized in a
ma-trix X, displacement vectors v in V, and the scalar offsets δ in
thevector δ.
Optimization Problem. Assuming a given vector field V, ourgoal
is to find the n optimal offsets δ such that the shape satis-fies a
given objective. In order to remain general, we first define
atemplate functional for the resulting optimization problem as
ES = minδf(δ) s.t. gi(δ) 6 0 and δl � δ � δu , (1)
where f is the objective function, gi are additional hard
equalityand/or inequality constraints, and δl and δu are lower and
upperboundary constraints. For instance, f could be the goal to
lower thez-position of the center of mass of an object, and g could
be the con-straints to keep the center of mass in a certain
xy-region. Boundaryconstraints are needed to prevent offset
surfaces from intersectingeach other or from reaching other
implausible values.
The functions f and gi are usually non-linear in the deformation
ofthe surfaces, making the problem a non-linear programming
task(NLP), which can be generally approached with existing
standardnumerical routines. However, a significant disadvantage of
this for-mulation is that the problem is highly underdetermined,
i.e., thereusually exist many offset surfaces that satisfy the
equation. Evenworse, the number of offsets δ equals the number of
vertices (i.e.,n), and therefore it is high-dimensional and scales
badly with in-creasing mesh resolution. In other words, the problem
is redun-dant and expensive to solve, hence, barely suitable for
practicalpurposes.
As a major contribution of this paper, we introduce a
reduced-orderformulation that provides a remedy for these issues.
Our solu-tion is to project the problem onto a lower-dimensional
basis de-termined by manifold harmonics [Vallet and Lévy 2008],
where wecan solve it more efficiently using standard numerical
routines—independently of the number of input vertices. In Section
5 wepresent the details of this approach.
4 Offset Directions and BoundsOne significant problem of offset
surfaces for 2-manifolds is thattoo large displacements may cause
the target surface to penetrateitself and lose its 2-manifoldness,
becoming unusable for practicalapplications (cf. Figure 3,
middle).
Such self-intersections can be either local or global. Local
fold-overs appear if, at any point of the surface, the orthogonal
distance
S
S
SS
V
Figure 3: Left to right: inner and outer offset surfaces with
in-creasing offset to the original. Middle: note the
self-intersectionswhere offsets get too large. Right: medial axis
as a global boundfor maximal offset.
of the offset to the surface becomes equal or higher than the
radiusof the maximal principal curvature κmax. Global
self-intersectionshappen if offsets from distant regions of the
surface intersect in theinterior or within concavities. These
problems can be approachedusing the shape skeleton as the upper
bound for the displacements(cf. Fig 3, right). If it is
appropriately chosen, i.e., it approximatesthe medial axis, which
is the set of all centers of spheres that touchS in at least two
points, and the offsets do not exceed it, both globaland local
self-intersections can be avoided.
Shape Skeleton. Since we are working with piecewise linear
tri-angle meshes, in practice, the medial axis is neither easy to
computeexactly, nor is it necessarily smooth at sharp corners. For
this rea-son, we strive for an approximation that is robust to
compute andprovides smooth skeletons.
We adapt the idea presented by Tagliasacchi et al. [2012], where
theoriginal surface is contracted iteratively using constrained
Lapla-cian smoothing until it converges to a skeleton S̆. The
advantageof this method over other solutions is that it is much
less sensitiveto surface detail and that it provides quite smooth
skeleton approx-imations, even at sharp corners of the input shape
(cf. Fig. 4, left).Recursive application of the contraction scheme
results in a meshthat converges to a one-dimensional curve, but in
early contractionstages, it forms a so-called meso-skeleton S̆,
which approximatesthe medial surface. That surface is especially
useful in the case ofcomplex objects (cf. Fig. 4, right), since it
helps keep a one-to-onecorrespondence with the vertices.
Figure 4: Left: Two examples of skeletons with a direct
one-to-onecorrespondence between outer and inner vertices and the
resultingvector field. Right: two meso-skeletons (cf. Section
4).
4.1 Offset Vectors
Inner Offset Vectors. By keeping track of the correspondencesof
the input mesh vertices x to the skeleton vertices x̆, we obtain
asurjective correspondence between S and S̆ (Fig. 4). We can
nowderive the vectors for inner offsets as v = v̆/‖v̆‖, with v̆ =
(x̆−x).Please note that these vectors point inwards, and are not
necessarilynormal to the surface. However, since they were created
by con-secutive contraction, they are rather smooth and provide
naturallysuitable trajectories for surface offsets.
Outer Offset Vectors. For the direction of outer offsets we
have,among others, the choice of taking the outward-pointing
normalvectors v = n of the input mesh, or taking the inverse
contrac-tion vectors v = −v. Usually we favor the latter option,
since the
-
Figure 5: Left: sur-faces are offset indepen-dently. Right: the
holehas been constrained tohave no offsets.
contraction vector field is of rather low frequency and thus
less sen-sitive to fine details of the input surface than the
normals, which canexhibit many high-frequency fluctuations.
4.2 Offset Bounds
Maximal Bounds. Given the offset vectors, we can use them
toprovide constraints for minimal and maximal displacements δl
andδu. In the case of inner offset surfaces S, we obtain the
individualmaximum displacement values as δu =
[|v̆1| |v̆2| . . . |v̆n|
]T , whichis the ‘safe’ distance to the skeleton. The choice of
the outer off-sets δu is usually not as critical, since we try to
keep the shape ofthe object as similar to the input as possible. We
therefore set itto a low value, which can be adjusted for
particular models indi-vidually. However, self-intersections can
still happen as shown inFig. 3, right.
Minimal Bounds. In the case of a double surface S, it is oftenof
interest to provide a minimal or maximal distance between
thesurfaces. For instance, it is often necessary to meet practical
fab-rication considerations, e.g., 3d-printer resolution. However,
sincethe offset vector field is in general not orthogonal to the
surface,these values cannot be measured directly along it. In order
to stillallow for such constraints, we project the desired minimal
thicknessvalues in the normal direction δln onto particular vectors
v to get aminimum offset in direction of the vector v: δl = 1vTnδln
, wheren is the unit surface normal. Thus, the minimal distances
between
S and S along V in both directions are given by δl =[δl
T δlT]T
.
Geometric Bounds. An additional option we provide are
explicitgeometric constraints that allow forcing selected regions
to desiredoffsets. Technically, we accomplish this by overriding
the selectedoffsets δ̂ ⊂ δ by setting them to desired values.
Especially, bysetting δ̂ = 0, regions obtain no displacement, which
is of interestif the surfaces S and S should be forced to coincide,
which createsopenings without affecting the volume (cf. Figure
5).
Offset Penalty. In order to preserve the visible shape, outer
off-sets could be suppressed by adding their squared sum to the
objec-tive, weighted bywp: wp‖δ‖
22. Moreover, this type of penalization
could be applied to any other subset of the displacements δ, or
usedas regularization, as discussed in Section 7.1.
5 Order ReductionIn this section we introduce an efficient order
reduction for the op-timization problem stated in Equation (1) by
transforming it into aspectral representation denoted as manifold
harmonics.
5.1 Manifold Harmonics
Essentially, manifold harmonics resemble the bases of the
Fouriertransform on meshes with arbitrary topology [Taubin 1995],
andexhibit a set of advantages we can exploit: first of all, if
appropri-ately chosen, they are orthogonal, making the basis
transformationa numerically stable operation. Second, they are
smooth, allowingfor well-defined continuous optimization. Finally,
in terms of an ar-bitrary manifold mesh, they have the advantage
that they “encode”the geometry and topology of the original object
[Levy 2006], suchthat their extrema usually lie at geometrically
exposed locations andcapture the intrinsic symmetry of the shape
[Zhang et al. 2010]
Discrete Laplace-Beltrami. The manifold harmonic functionscan be
computed as the eigenfunctions of the Laplace-Beltrami op-erator ∆S
of the input surface. This operator is a generalization ofthe
Laplacian operator to 2-manifolds and allows performing
differ-ential operations on surfaces. Generally, it is defined as
the diver-gence of the gradient, i.e., the sum of second partial
derivatives ofa parameterized surface. However, in a discrete
setup, the Laplace-Beltrami operator L can be derived as the
umbrella operator directlyfrom the mesh, without the usage of a
parameterization.
In the literature, there are a number of propositions how to
dis-cretize the differential operator. In our implementation, we
followPinkall and Polthier [1993] due to its symmetry:
Li,j =
ωi,j if (i, j) ∈ E∑
k∈N(i) −ωi,k if (i = j)0 otherwise ,
(2)
where E denotes the set of edges, and N(i) is the set of
first-orderneighbors of vertex i. The weights ωi,j are computed
using thegeometric properties of the mesh, in particular:
ωi,j =12(cotϕli,j + cotϕ
ri,j
),
where ϕli,j and ϕri,j are the angles opposite to the edge (i, j)
in the
left and right incident triangles respectively.
Harmonic Basis. We have chosen this operator because it is
sym-metric and positive semi-definite, thus, respecting the
spectral the-orem, all its eigenvalues λi are real and non-negative
(i.e., λi > 0),and all eigenvectors γi are mutually orthogonal,
and can be furtherorthonormalized such that ∀ i : ‖γi‖2 = 1. They
can be computedby the diagonalization L = ΓΛΓT , where the diagonal
entries ofthe matrixΛ are the eigenvalues λi, such that λ1 6 λ2 6 .
. . 6 λn,and the columns of the matrix Γ =
[γ1 γ2 . . . γn
]are the respec-
tive eigenvectors. From the functional analytic point of view,
theeigenvectors become the eigenfunctions, and since they satisfy
theLaplace equation, they are denoted as harmonics.
The basis functions[γ1 γ2 . . . γn
]correspond to the lowest to
highest frequencies of the input mesh, thus the first few
functionscapture the global shape appearance and the remaining ones
cap-ture the details. For this reason, a low-frequency base surface
canbe well approximated using only the first few components.
In practice, the computation of the full diagonalization of a
largematrix is a significant computational challenge. However,
since weare only interested in a reduced set of k bases, there
exist a num-ber of efficient algorithms that can be utilized for
our purpose verywell. We have used the implementation from the
ARPACK library[Lehoucq et al. 1998]. An additional advantage is
that we only needto compute them once per mesh.
5.2 Reduced Optimization Problem
The main idea of order reduction is to represent the offsets δ
in themanifold harmonic basis. This allows us to significantly
reduce theorder of the problem. Simultaneously, adjusting the low
frequenciesonly enables us to perform desired changes of the
overall shapewhile still preserving the local details.
In order to achieve this, we express the offset surface S as a
linearcombination of a set of k eigenfunctions Γk =
[γ1 γ2 . . . γk
]:
xi = xi +
k∑j=1
αjγij vi ,
where αj are elements of the unknown coefficient vector α ∈
Rk,and the problem now reduces to finding that vector. This
drastically
-
lessens the degrees of freedom of the problem, and also serves
as animplicit regularization (discussed in more detail in Section
7). Wecan now write the optimization from Equation (1) in terms of
α as
ES = minαf(α) s.t. gi(α) 6 0 and δl � Γkα � δu , (3)
which has the benefit of resulting in k � n optimization
un-knowns. Please note that this number is independent of the
meshresolution—only the number of chosen harmonic bases is
relevant.In our experiments, most offset meshes can be approximated
ade-quately with k 6 36 basis vectors (cf. supplemental
material).
The geometric constraints can be enforced by truncating the
cor-responding basis functions, such that ∀j : γij = 0. The result
isthat during the optimization, the changes in α have no effect
onthe selected vertices vi. Hence, we can also relax the
respectivebox constraint to δli = −∞ and δui = +∞ such that they
wouldbe able to develop freely. While the surface loses the
smoothnessat those vertices, the final result is not affected,
since we overridethem with the desired values.
Finally, the harmonic basis also allows us to provide an option
topenalize the outer displacements in order to preserve the
originalshape of the object. We do this by minimizing the squared
mag-nitude of the coefficient α1, where we weight the strength of
thepenalty with wp:
ES = minα
(f(α) +wpα
21
).
Since the first element corresponds to the constant
zero-frequency(DC element), it changes the volume, while the other
componentscontain the detail, but have zero mean.
5.3 Analytic Gradient
Given an objective function f that can be differentiated w.r.t.
thesurface vertices X analytically, our formulation of shape
optimiza-tion using offset surfaces allows for a closed-form
analytic compu-tation of the gradient of the functional in Eq. (3).
Thus, a majoradvantage of our formulation is that the gradient can
be calculatedby repeated application of the chain rule as
∇ES =∂f
∂α=∂f
∂X
∂X
∂δ
∂δ
∂α,
where X =[x1 y1 z1 x2 y2 z2 . . . xn yn zn
]T are the n verticesof the original surface concatenated into a
〈3n× 1〉 vector, and δis the 〈n× 1〉 vector of corresponding scalar
displacements.The derivatives ∂f/∂X with respect to surface
vertices X result in a〈1× 3n〉 vector. The derivatives of ∂X/∂δ
result in a sparse matrixof the size 〈3n× n〉, which contains in
each column the respectivedisplacement vector v. Eventually, the
derivatives ∂δ/∂α are theharmonic basis vectors Γk, which form a
〈n× k〉 matrix. The finalpartial derivatives of the objective ∂f/∂α
with respect to α thusreduce to a 〈1× k〉 sized vector. The
derivatives for the constraintfunctions gi can be computed
accordingly.
Please note that the given matrix sizes are with respect to only
one-sided displacement with k coefficients. For two-sided offsets,
thematrices need to be extended accordingly, which is explained
inmore detail in the supplemental material.
6 Applications and Results
6.1 Control of Mass Properties
We demonstrate the application of our method by optimizing
massproperties of a solid. In particular, the physical mass moments
of arigid body are attributes that determine how an object behaves
under
the influence of mechanical forces, e.g., gravity, torque, etc.
Themoments of zeroth, first, and second order of a rigid object
definedby its surface S describe the total mass m(S), the center of
massc(S), and the symmetric 〈3× 3〉 tensor of inertia I(S),
respectively.We summarize these 10 properties as
P(S) =[m cx cy cz Ixx Iyy Izz Ixy Iyz Izx
]T . (4)The tensor of inertia I(S) is symmetric and contains the
quadraticterms, denoted as moments of inertia, on the diagonal, and
themixed terms, denoted as products of inertia, on the
off-diagonals.Please refer to the supplementary material for a
derivation and fur-ther details. While the physical mass moments
are integrals overthe volume of the solid, uniform mass density and
Gauss’s Diver-gence Theorem allow evaluating them as functions of
the boundarysurface of the solid S = {X,T}, which we also describe
in detail inthe supplementary material.The object’s mass m relates
to its volume V by m = ρV , whereρ is the material density
coefficient. Without loss of generality,for solid objects with
uniform mass density distribution, we canassume ρ = 1. Note that in
the following, all mass densities aregiven relative to the object
mass density, i.e., all are divided by themass density of the
object, and the density of air is set to 0.
6.2 ObjectivesWe provide a number of specific sets of objectives
and constraintsin order to fulfill certain tasks that require the
control of mass prop-erties. Often, we want to control the static
and rotational stabilityof shapes. These goals can be specified by
placing the object in theorigin of the world coordinates in the
desired pose.
model © http://www.modelplusmodel.com model ©
http://archive3d.net Horse (by Gian Lorenzo)
Figure 6: Examples of static stability optimization. The
dashedlines indicate the center of mass of the entire solid, the
thick linesthe ones of the shell after optimization.
Static Stability. An object stands stably if the orthogonal
pro-jection of its center of mass c on the ground plane lies within
theconvex hull defined by the object’s ground contact points. We
placethe object in the xy-plane such that the centroid of the
convex hullis in the origin, and we optimize the following
objective:
f(α)static := c2x + c
2y + cz ,
gi(α)static := (cx + cy)2 − (r − ε)2 6 0 , cz > 0 ,
(5)
where r is the radius of the largest inscribing circle of the
convexbase polygon, and ε is a safeguard (cf. Figure 6).
Static Stability under Storage. A storage container alters
itsmass properties when the initial void is filled with the
storedmedium. To ensure static stability in both states, we
optimize boththe empty and the filled container. Assuming a uniform
mass den-sity ρ of the stored medium, the mass of the empty and
filled con-tainer is given by mempty = m(S) and mfull = mempty +
ρV(S)respectively. The center of mass of the empty and filled
containeris given by
cempty = c(S) and cfull =memptycempty + ρV(S)c(S)
mfull. (6)
-
We now optimize these centers of mass simultaneously by
applyingobjective (5) to both. Figure 1, right, depicts a leaning
bottle thathas been optimized to stand stable if filled with
water.
original model © http://cyberware.com
Figure 7: A roly-poly toy designed with our method. The center
ofmass (black dot) is placed below the center of the hemisphere at
thebottom of the object (red dot). When pushed, a righting
momentcorrects the pose (left) until the equilibrium position is
reached(center). A rendering and a fabricated replica is shown on
the right.
Monostatic Stability. An object is called monostatic if it has
onlya single stable resting position. If perturbed, its shape and
innermass distribution produces a righting moment that returns it
to thisequilibrium position. A common application of this principle
areroly-poly toys. As shown in Figure 7, they commonly consist ofa
hemispherical element at the bottom and a figurine on top.
Thecorrect righting behavior is obtained when the center of gravity
clies below the hemisphere center, so we optimize a variant of
(5):
f(α)static := cz ,gi(α)static := { cx , cy } = 0 , cz − r + ε
< 0 ,
(7)
where r denotes the radius of the hemisphere and ε acts as a
safe-guard against tolerances in the fabrication process, which
couldraise a center of gravity that is placed just below the
hemispherecenter (cf. Fig. 7).
model © http://www.cgtrader.com (DrGlassDPM)
Figure 8: A spinning turtle model. Left, the original model,
right,an object optimized for spinning.
Rotational Stability. An object rotates stably about an axis if
theaxis is its smallest or largest principal axis of inertia
[Goldstein et al.2002]. Hence, we place the object in a coordinate
frame in a posewe want it to spin, with ~z as the up and rotation
axis (see Fig. 13).Then we optimize the body such that its
principal axis equates therotation axis with moment Ic = Izz, and
such that the cross termsIxz and Iyz vanish. Here we adapt the
objective as recently pro-posed by Bächer et al. [2014]:
f(α)inertia := mcz +
(Ia
Izz
)2+
(Ib
Izz
)2,
gi(α)inertia := { cx , cy , Ixz , Iyz } = 0 , cz > 0 .(8)
In general, the remaining moments of inertia Ixx and Iyy do
notcoincide with the coordinate frame axes. We obtain the
principalaxis moments Ia and Ib as the eigenvalues of the 〈2× 2〉
upper-leftpart of the inertia tensor I:
{ Ia , Ib } =12
(Ixx + Iyy ∓
√I2xx + 4I2xy − 2IxxIyy + I2yy
).
model © http://www.turbosquid.com (amarkin)
Figure 9: An object optimized for buoyancy in a liquid of a
specificdensity ρ. By adding a void with appropriate shape and
volumeinside the object, buoyancy can be achieved. Left: input
model,center: optimized shape, right: 3d-printed example.
Specific Volume and Buoyancy. Our method allows the cre-ation of
objects whose inner void should exhibit a specific volume.Given a
target volume V , its difference to the volume of the void isgiven
by (V − V(S)) and can be penalized either in the objectivefunction
or enforced by a constraint.
A more complex application of this capability is to control the
buoy-ancy of an object. To ensure static stability of an object
that isimmersed in a fluid, its gravitational and buoyant forces
shouldbe at equilibrium in the desired orientation of the object.
We as-sume for simplicity that our object is incompressible and
com-pletely submerged in a fluid with a uniform mass density ρ <
1with downward gravity g = −g~z. A buoyant force V(S)g~z isexerted
on the center of buoyancy cbuoy = c(S), while the grav-itational
force −m(S)g~z acts at the center of gravity c = c(S).Equilibrium
is established if the magnitudes of the forces cancel,i.e., 0 =
V(S)ρg − m(S)g = (ρ − 1)V(S) + m(S), and if notorque is produced on
the object, i.e., cbuoy,x = cx and cbuoy,y = cy.Furthermore, a
stable equilibrium is only reached if cbuoy,z > cz.Otherwise,
the object would flip upside down. For a floating object,we
consequently optimize
f(α)buoyancy :=((ρ− 1)V(S) +m(S)
)2,
gi(α)buoyancy := { cx − cbuoy,x , cy − cbuoy,y } = 0 ,cz <
cbuoy,z .
(9)
A result of an object optimized for buoyancy is provided in Fig.
9.
6.3 Implementation
Implementation. We implemented the optimization frameworkusing
MATLAB 2014a and C++, where we utilized the LIBIGLlibrary [Jacobson
et al. 2014] for some computations. For thecomputation of skeletons
we used the CGAL implementation of[Tagliasacchi et al. 2012]. For
the computation of the eigendecom-position, we utilized the sparse
function eigs, which implementsthe ARPACK routines [Lehoucq et al.
1998]. For the constrainedNLP-problem, we used the MATLAB
Optimization Toolkit usingfmincon, in particular the constrained
medium-scale active-setsolver, however, it also works well with the
large-scale interior-point solver, or could be easily plugged into
another numerical rou-tine. Our experimental MATLAB/C++ code will
be available onthe paper web page.
Timings. The preprocessing timings lie generally in the range
ofseveral seconds. In particular, the convergence time of the
skeletondepends on the chosen parameters, but it usually ranges
between5−30s. The longest computation we observed was the Horse
model(cf. Figure 6, 86k vertices) with 84s. The computation of the
sparseLaplacian and its eigenvectors depends on the chosen k, but
evenfor large meshes (e.g., the Horse with k = 36), it takes less
than4s to compute. The optimization time for our examples is
usuallybetween a few seconds in simple cases (e.g., Bottle in
Figure 1), upto few minutes for more complex examples (e.g., Horse
3.8min).Timings were taken on an Intel(R) Core(TM) i7-3770K
[email protected]
-
GHz with 32 GB RAM running Windows 8; please refer to
thesupplemental material for detailed timings.
Fabrication. We have 3d-printed several models using
different3d-printers: a MakerBot Replicator 2 for early testing, a
Dimen-sion uPrint Plus for prototyping and most of the results, and
finallyalso an Objet Eden 260 for poly-jet prints for high-quality
results.Since the FDM prints are in general not entirely
watertight, we im-pregnated them with a clear-coating material. Our
models workedwell with these printers, however, usually they needed
to be cutinto pieces in order to be printed with support material,
and gluedtogether after a base-bath. We performed the cutting
manually us-ing a standard modeling software, but also automatic
methods forthe partitioning of objects [Luo et al. 2012] are
available.
7 Discussion
7.1 Harmonic Basis FunctionsBasis Dimensionality. The number k
of basis-functions allowsa trade-off between reduced runtime and
increased robustness onthe one hand and a solution closer to a
reference optimum on theother. For an evaluation, we compare the
reduced-order results to astraightforward shape optimization of
each individual vertex.
0
1
2
3
4
5
9
11
13
15
17
19
10 18 26 34 42 50 58 66 74 82 90 98
time
[s]
obje
ctive
f
f f_ref time
Figure 10: Number of used basis functions k compared to the
ob-jective value (orange), processing time (blue), and a reference
ob-jective (brown). The reference is fref = 11.28 and tref = 87s.
Theobject has n = 750. The results with a low number of basis
func-tions (shaded region) did not converge within the posed
constraints.
In Figure 10, we plot the value of the objective f versus
increas-ing values of k measured on the object shown in Figure 11
withn = 750 and the objective (8). If too few basis functions are
cho-sen, the constraints cannot be fulfilled, such that a solution
doesnot exist (shaded area). However, already a small number of
modes(k = 34) permits a solution that is remarkably good and fast
to ob-tain. Thus, a further increase in k only yields minute
improvementswhile increasing the computation time.The speedup of
our algorithm is in any case significant. If we opti-mize the shape
with 34 basis functions (the dashed vertical line inFig. 10), we
obtain a very good approximation within 0.44 seconds,compared to 87
seconds for the full solution, which is a speedup of2 orders of
magnitude. Indeed, in practice, the speedup for largemodels (i.e.,
n >> 1000) is even higher, since the full
per-vertexcomputation of such models takes hours or even days.We
have also computed the optimal shape using a full set of
basisfunctions (k = n). We obtained the same optimality value (f
=11.27) at a runtime of 93s, and a surface very similar to the
onedelivered by the full solution in the Euclidean space (cf.
Figure11, right). This is to be expected, since the problem is in
theorythe same, the differences of the final geometry are due to
numericalapproximation errors. Thus, the general conclusion is to
choosethe number k low; only sufficiently high to express the shape
withthe necessary number of degrees of freedom needed to fulfill
theconstraints.
full k=34 k=94 k=n
f=11.3 f=14.6 f=12.0 f=11.3t=87s t=0.4s t=4.4s t=93s
Figure 11: Results of the evaluation in Figure 10 with n =
750.Left to right: result of the full method, results with
increasing k.
Regularization. An important aspect of our solution is an
im-plicit regularization. Since the full problem is highly
underdeter-mined, there exist many solutions, and the finally
obtained oneis not necessarily very smooth, as depicted in Figure
11, left.This problem could be approached with Tikhonov
regularizationby adding an additional termwr‖δ‖22 to the objective,
which wouldfavor small displacements and make the problem fully
determined,however, at the cost of its size and computation time.
Additionally,we found the results still not smooth. In contrast,
using a smallnumber of harmonics allows us to express the
displacement withlow-frequency basis functions, such that each
approximated resultprovides a smooth surface in the Laplacian
sense.
Choice of the Basis. We have chosen the Laplacian as in (2)since
it reflects the object’s geometry, and it is symmetric
positivesemi-definite. However, there are other possible
approximations ofmanifold harmonics, as for instance discussed by
Vallet and Levy[2008]. We have experimented with them and found
that a moreaccurate discretization of the operator results in a
better shape ap-proximation and faster convergence. Thus, a
detailed investigationof this issue would be a possible direction
for future work.
Surface Detail. A final point to note is that the outer offset
sur-faces themselves retain the detail of original surfaces. This
is be-cause only the offsets are projected to a low-frequency
space, notthe surface itself.
7.2 Comparisons
In Figure 12, we show a comparison to the state-of-the-art in
theform of Make-It-Stand [Prévost et al. 2013], which we use
withoutouter-surface deformation by removing the scaling and
deformationterms and performing the plane-carving algorithm only.
We alsoset the wall thickness in our case to a similar distance as
the lowestpossible 1 voxel in the other method. The figure shows
that in thiscase, our method indeed approximates the interior void
better andprovides slightly more stable mass properties:
our: f = 2.52 , m = 21.7 , c = [ 0.63 0.0 2.13 ] ,ref: f = 2.96
, m = 26.1 , c = [ 0.78 0.0 2.35 ] .
original model © ETH Zurich, used with permission
Figure 12: Comparison with the method of [Prévost et al.
2013]without outer deformation of the shape. Both results achieve
staticstability as evidenced by their fabricated replicas (right),
however,our method provides a slightly better result.
In Figure 13 we show a comparison of our method with the one
ofBächer et al. [2014]. We set k = 24, and also in this case
onlythe optimization of the interior has been used in both cases.
Ourmethod converged in 6.8s. Below, we provide the mass moments
-
of both results, where we can see that we achieve nearly
identicalvalues as the reference, while providing a smooth inner
surface:
our: f = 11.4 , P = [ 1.07 | 0 0 1.13 | 0.35 0.41 0.52 | 0 0 0
],ref: f = 8.16 , P = [ 1.20 | 0 0 1.13 | 0.34 0.36 0.57 | 0 0 0
].
original model © Disney Research, used with permission
Figure 13: Comparison with Spin-It [Bächer et al. 2014].
Theinput unstable spinning top is optimized using their (far left)
andour method with k = 24 (center left). Right: fabricated
results.
7.3 Limitations
Deformation Limitations. Other approaches [Prévost et al.
2013;Bächer et al. 2014] utilize linear blend skinning (LBS)
withbounded biharmonic weights [Jacobson et al. 2011] for the
adjust-ment of the objects’ shapes. Using this type of deformation
withwell-defined similarity transformations (scale, translation,
rotation)enables their methods to deform the model in a meaningful
mannerwith more degrees of freedom than given by our outer
displacement.Additionally, careful manual placement of control
handles enablesthe user to influence the deformation semantically,
i.e., by addinghandles to the extremities of articulated objects,
the system can ex-plicitly account for their pose [Prévost et al.
2013]. In contrast,even if the basis functions have global support,
our displacementcan deform the shape only along a predefined vector
field, whichis a much more restricted shape-editing operation, and
it cannotchange the objects’ pose (cf. Figure 14).
Boundary Constraints Limitations. The presented optimiza-tion
pipeline is in general very robust. However, the algorithmalso
depends on the quality of the provided skeleton. We
haveexperimented with several approaches, and found the solution
ofTagliasacchi et al. [2012] to be the most reliable, since it
providesan approximation of the medial surface, denoted as
meso-skeleton,that is a trade-off between the medial axis and a
smooth 1d skele-ton. Nonetheless, their approach still requires
tuning of parameters.This issue is crucial, since the offset
surface is shifted along vectorstoward the skeleton, hence there
must exist a surjective (in the con-tinuous sense) mapping between
S and S̆. If the vectors v̆ intersector cross the boundary in any
way, our method can produce artifacts.This can happen at fine
details, where the skeleton approximatesthe surface too roughly, as
in the case of the fingers of a hand.
Design Space Limitations. Our solution space is limited by
thedegrees of freedom provided by the k manifold harmonics, thusany
better optimum that lies outside of this space cannot be
reached.Moreover, the usage of a constant shape skeleton as an
upper boundfor inner displacements additionally limits the design
space, suchthat potentially valid solutions that require crossing
of the medialaxis cannot be reached. Finally, problems where
multiple voids arenecessary to achieve a good optimum are not well
served with ouralgorithm. Space carving methods that perform global
topologyoptimization are potentially more flexible for problems
where mul-tiple voids are needed, since their solution space is
generally biggerand not limited to one surface.
7.4 Fabrication Considerations
Print Time and Support Material. We observed that smoothmodels
need less support material and have lower print times than
orig
inal
mod
el ©
Sta
nfor
d Co
mpu
ter G
raph
ics
Labo
rato
ry
Figure 14: Example of static stability optimization of a
complexmodel. From left to right: meso-skeleton, outer shape with
centerof mass, inner surface only, inner and outer surface
optimization.The inner surface result has a too thin wall to be
printed. The outersurface offset solves this problem.
the voxelized models for FDM. This is basically due to the
factthat voxel-bottoms that are parallel to the ground plane need
fullsupport, while smooth surfaces are self-bearing up to a certain
de-gree. Moreover, the total distance traveled by the printer head
isshorter on smooth curves than Manhattan-distance voxels. In a
di-rect comparison with the work of Prévost et al. [2013] using
theresults shown in Figure 12, our approach cuts both the support
ma-terial and the print time roughly by half. Further details can
befound in the supplementary material.
Material Density Issues. In practice, we found that the
materialdensity values as presented by manufactures (e.g., ρABSplus
= 1.04)do not necessarily apply to the printed models. This is due
to thefact that FDM-fabricated solids have a large number of
micro-holesintegrated in the massive. These holes can be filled
with air or water(especially after base-bath for support
dissolution), changing theactual density of the mass. This problem
has also been addressed byChristiansen et al. [2015]. We resolved
it by coating wet models,which stabilized their density.
8 ConclusionsWe have presented a novel method for shape
optimization of aninput object represented by a 2-manifold in order
to attain givenglobal specifications. The key idea was the
utilization of offset sur-faces, whose parameters are determined by
continuous constrainednon-linear optimization, such that the
enclosed rigid body realizesa given objective. We ensured the
computational feasibility of ourmethod by reducing the order of the
problem by solving it in a suit-able lower-dimensional subspace,
given by the manifold harmonicbasis. Apart from increased numerical
robustness due to an inherentregularization, we achieved a
reduction of the computation times ofat least of 2-3 orders of
magnitude using common off-the-shelf nu-merical solvers in our
implementation. We documented the versa-tility of our approach by
optimizing a range of physical propertiesof rigid objects, and we
provided a comparison with previous meth-ods for shape
optimization. In the future, we intend to integrate ourtechnique in
popular modeling software tools to assist users in thecreation of
fabrication-ready customized models.
AcknowledgmentsWe would like to acknowledge Christian Hafner for
help with therenderer, Paul Guerrero for help with MATLAB, Moritz
Bächer forsharing the models and providing the permission to use
them, Se-bastien Loriot for sharing his code for the computation of
the skele-tons, and Andrea Tagliasacchi for pointing us there.
This research was funded by the Austrian Science Fund
(grants:FWF P24600-N23, FWF P27972-N31, FWF P23700-N23), the
Eu-ropean Research Council (ERC Advanced Grant "ACROSS", grant
-
agreement 340884), and the German Research Foundation
(DFG,Gottfried-Wilhelm-Leibniz Programm).
References
BÄCHER, M., BICKEL, B., JAMES, D. L., AND PFISTER, H.2012.
Fabricating articulated characters from skinned meshes.ACM
Transactions on Graphics 31, 4 (July), 1–9.
BÄCHER, M., WHITING, E., BICKEL, B., AND SORKINE-HORNUNG, O.
2014. Spin-It: Optimizing Moment of Inertiafor Spinnable Objects.
ACM Transactions on Graphics 33, 4(July), 1–10.
BICKEL, B., BÄCHER, M., OTADUY, M. A., LEE, H. R., PFIS-TER, H.,
GROSS, M., AND MATUSIK, W. 2010. Design andfabrication of materials
with desired deformation behavior. ACMTransactions on Graphics 29,
4 (July), 1.
BICKEL, B., GROSS, M., KAUFMANN, P., SKOURAS, M.,THOMASZEWSKI,
B., BRADLEY, D., BEELER, T., JACKSON,P., MARSCHNER, S., AND
MATUSIK, W. 2012. Physical facecloning. ACM Transactions on
Graphics 31, 4 (July), 1–10.
BOTSCH, M., AND KOBBELT, L. 2004. An intuitive frameworkfor
real-time freeform modeling. ACM Transactions on Graphics23, 3
(Aug.), 630.
CHRISTIANSEN, A. N., SCHMIDT, R., AND BÆ RENTZEN, J. A.2015.
Automatic balancing of 3D models. Computer-Aided De-sign 58 (Jan.),
236–241.
COROS, S., THOMASZEWSKI, B., NORIS, G., SUEDA, S., FOR-BERG, M.,
SUMNER, R. W., MATUSIK, W., AND BICKEL, B.2013. Computational
design of mechanical characters. ACMTransactions on Graphics 32, 4
(July), 1.
GOLDSTEIN, H., POOLE, C. P., AND SAFKO, J. L. 2002. Classi-cal
Mechanics. Addison Wesley.
HAFTKA, R. T., AND GÜRDAL, Z. 1992. Elements of
StructuralOptimization, 3rd rev. a ed. Springer.
JACOBSON, A., BARAN, I., POPOVIĆ, J., AND SORKINE, O.2011.
Bounded biharmonic weights for real-time deformation.ACM
Transactions on Graphics 30, 4 (July), 1.
JACOBSON, A., PANOZZO, D., AND OTHERS, 2014. {libigl}: Asimple
{C++} geometry processing library.
KIM, T., AND JAMES, D. L. 2009. Skipping steps in
deformablesimulation with online model reduction. ACM Transactions
onGraphics 28, 5 (Dec.), 1.
KOBBELT, L., CAMPAGNA, S., VORSATZ, J., AND SEIDEL, H.-P.1998.
Interactive multi-resolution modeling on arbitrary
meshes.Proceedings ACM SIGGRAPH ’98 (July), 105–114.
LEHOUCQ, R. B., SORENSEN, D. C., AND YANG, C. 1998.ARPACK Users’
Guide, band 6 of ed. Society for Industrial andApplied Mathematics
(SIAM), Jan.
LEVY, B. 2006. Laplace-Beltrami Eigenfunctions: Towards
anAlgorithm That "Understands" Geometry. In IEEE
InternationalConference on Shape Modeling and Applications 2006
(SMI’06),IEEE, 13–13.
LU, L., CHEN, B., SHARF, A., ZHAO, H., WEI, Y., FAN, Q.,CHEN,
X., SAVOYE, Y., TU, C., AND COHEN-OR, D. 2014.Build-to-Last:
Strength to Weight 3D Printed Objects. ACMTransactions on Graphics
33, 4 (July), 1–10.
LUO, L., BARAN, I., RUSINKIEWICZ, S., AND MATUSIK, W.2012.
Chopper: partitioning models into 3D-printable parts.ACM
Transactions on Graphics 31, 6 (Nov.), 1.
MESSNER, A. M., AND TAYLOR, G. Q. 1980. Algorithm 550:Solid
Polyhedron Measures [Z]. ACM Transactions on Mathe-matical Software
6, 1 (Mar.), 121–130.
PENTLAND, A., AND WILLIAMS, J. 1989. Good vibrations:model
dynamics for graphics and animation. ACM SIGGRAPHComputer Graphics
23, 3 (July), 207–214.
PINKALL, U., AND POLTHIER, K. 1993. Computing discrete min-imal
surfaces and their conjugates. Experimental Mathematics 2,1,
15–36.
PRÉVOST, R., WHITING, E., LEFEBVRE, S., AND SORKINE-HORNUNG, O.
2013. Make It Stand: Balancing Shapes for3D Fabrication. ACM
Transactions on Graphics 32, 4 (July), 1.
SKOURAS, M., THOMASZEWSKI, B., BICKEL, B., AND GROSS,M. 2012.
Computational Design of Rubber Balloons. ComputerGraphics Forum 31,
2pt4 (May), 835–844.
STAVA, O., VANEK, J., BENES, B., CARR, N., AND MĚCH, R.2012.
Stress relief: improving structural strength of 3D
printableobjects. ACM Transactions on Graphics 31, 4 (July),
1–11.
SUMNER, R. W., SCHMID, J., AND PAULY, M. 2007. Embed-ded
deformation for shape manipulation. ACM Transactions onGraphics 26,
3 (July), 80.
TAGLIASACCHI, A., ALHASHIM, I., OLSON, M., AND ZHANG,H. 2012.
Mean Curvature Skeletons. Computer Graphics Forum31, 5 (Aug.),
1735–1744.
TAUBIN, G. 1995. A signal processing approach to fair sur-face
design. In Proceedings of the 22nd annual conference onComputer
graphics and interactive techniques - SIGGRAPH ’95,ACM Press, New
York, New York, USA, 351–358.
THOMASZEWSKI, B., COROS, S., GAUGE, D., MEGARO, V.,GRINSPUN, E.,
AND GROSS, M. 2014. Computational designof linkage-based
characters. ACM Transactions on Graphics 33,4 (July), 1–9.
TIMMER, H., AND STERN, J. 1980. Computation of global geo-metric
properties of solid objects. Computer-Aided Design 12, 6(Nov.),
301–304.
UMETANI, N., KAUFMAN, D. M., IGARASHI, T., AND GRIN-SPUN, E.
2011. Sensitive couture for interactive garment mod-eling and
editing. ACM Transactions on Graphics 30, 4 (July),1.
UMETANI, N., IGARASHI, T., AND MITRA, N. J. 2012.
Guidedexploration of physically valid shapes for furniture design.
ACMTransactions on Graphics 31, 4 (July), 1–11.
VALLET, B., AND LÉVY, B. 2008. Spectral Geometry Process-ing
with Manifold Harmonics. Computer Graphics Forum 27, 2(Apr.),
251–260.
VON TYCOWICZ, C., SCHULZ, C., SEIDEL, H.-P., AND HILDE-BRANDT,
K. 2013. An efficient construction of reduced de-formable objects.
ACM Transactions on Graphics 32, 6 (Nov.),1–10.
WANG, W., WANG, T. Y., YANG, Z., LIU, L., TONG, X., TONG,W.,
DENG, J., CHEN, F., AND LIU, X. 2013. Cost-effectiveprinting of 3D
objects with skin-frame structures. ACM Trans-actions on Graphics
32, 6 (Nov.), 1–10.
ZHANG, H., VAN KAICK, O., AND DYER, R. 2010. Spec-tral Mesh
Processing. Computer Graphics Forum 29, 6 (Sept.),1865–1894.
ZHOU, Q., PANETTA, J., AND ZORIN, D. 2013. Worst-case
struc-tural analysis. ACM Transactions on Graphics 32, 4 (July),
1.
ZHU, L., XU, W., SNYDER, J., LIU, Y., WANG, G., AND GUO,B. 2012.
Motion-guided mechanical toy modeling. ACM Trans-actions on
Graphics 31, 6 (Nov.), 1.