Embed Size (px)
Citation preview

RCE Platform Technology (RPT)
Sergio Maldonado ([email protected])
Software ArchitectureDevelopment Environment

2
RCE Platform Technology – Software Overview
Topics Covered:
• Embedded System Software- Runtime Environment: The Core
- Service Libraries
- System Configuration
• Software Development- SDK
- Development Model
• Protocol Plugin Software- Socket Abstraction Services (SAS)

3
RCE Embedded System Software
The RCE system software consists
of:
• Bootloaders- Xilinx FSBL
- U-Boot
• RTEMS operating system- Zynq board support package
- OS primitives: semaphores,
message queues, timers, tasks, etc
- POSIX support, FAT filesystem
• Kernel extensions and
enhancements- Provided by the RPT group
• Linux Operating system- Filesystem administration and
system maintenance
Core
Services
Applications
Bootloaders

4
RCE Embedded System – Core and Services
Applications
Boot Loaders
Services
Core
NFS Telnet Shell RTS DSL ATCA
Network 1/10 GE drivers SAS
Kernel
SD & UART drivers Memory & task mgmt Dynamic linker/loader SVT
Console

5
RCE Runtime Core
The Core is the set of software that provides the base level
of runtime operation
• RTEMS kernel
• C runtime libraries
• RPT additions to kernel functionality- SD device driver
- UART device driver
- Dynamic linker/loader
- Memory management utilities
- Task utilities
- Configuration using Symbol/Value tables
- Filesystem abstraction: Namespaces

6
RCE Runtime Services
A set of services are built on top of the Core to provide:
• Embedded console
• Shell and extensions
• 1-GE or 10-GE network and TCP/IP stack
• C++ runtime library
• Telnet
• NFS
• Distributed Services Lookup (DSL)
• ATCA Services
• Application Initialization

Shareable Images

8
Shareable Images
The RCE runtime environment operates by executing code
located in ELF formatted, dynamically loaded/linked
shareable objects. The internal format of these ELF objects
has been crafted specifically for the RCE runtime
environment. These shareable images are separated into
three categories.
• Shared Library - implementation
• Executable - tasks
• Symbol/Value Table - configuration

9
Shareable Images - Shared Library
• Implementations for general consumption by other shared
images
• Not associated with a specific task
• Define an initialization entry point- Executed by linker prior to memory fixup
- Used for initialization of library prior to use by other shared images.
• Can be installed as memory resident- Memory resident libraries are loaded once but may be linked
against by many other shareable images.
• Can be linked against any other shared library
• Use the .so filename extension

10
Shareable Images - Executable
• Defined as a pure RTEMS task along with its corresponding
dynamically loaded/linked executable code.
• Must satisfy certain Core requirements- Task entry hook – Task_Start
- Task exit hook – Task_Rundown
- Task specifications (name, priority, etc) are defined in a data
structure, which may be located in SVT tables. – Task_Attributes
• Can link against any shared library and may utilize any
installed SVT.
• Use the .exe filename extension

11
Shareable Images - Symbol Value Table
• Data only files containing values (data structures) mapped to
symbol names (character string).
• Storage of system and application configuration data
structures
• Do not link against shared libraries
• Use the .svt filename extension

12
Shareable Images – Linker and Loader
The dynamic linker/loader is a fundamental component of the
Core.
• Locates image files on the target filesystem
• Loads image segments into appropriate memory regions
• Relocates and fixes up symbols
• Dynamically resolves library dependencies- Recursively loads and links all required images

13
Shareable Images - Benefits
The usage of shareable images provides the maximum
flexibility for development and maintenance of both system
and application software.
• Code can be modularized to encapsulate common functionality
• Software interfaces can be extended and deployed without
requiring a full recompilation of code bases
• The Core and all system service libraries can be developed
and maintained independent of deployed application code
• Development of applications can be more easily distributed
amongst several functional groups.

14
Shareable Images – Namespaces (I)
The dynamic loader locates images by employing the binding of a logical
name, or namespace, to a specific directory on the target filesystem.
• A namespace is a string identifier used to associate a set of target images
with some user defined category or organizational structure
• The namespace string must- be unique over the set of all assigned namespaces in a running system.
- not contain the reserved character ":”
• The namespace gets mapped at runtime to a path on the target filesystem.- This mapping may be stored in a configuration file
• The set of images associated with a namespace must all reside in the
same directory on the target filesystem
• All dynamic images must specify a namespace and filename at link time
using the -soname linker flag
• The format of the argument to the -soname linker flag must be: - "<namespace>:<image_filename>”

15
Shareable Images – Namespaces (II)
The benefits of using namespaces include:
• Separation of software images into logical functional groups.
• Image portability throughout the filesystem
• Execution of images over a network filesystem (NFS)
• Deployment of images to the target filesystem need not take
place until the test and debug cycle is complete.

16
Shareable Images – Namespaces (III)
User-DefinedNamespace(s)
ConfigNamespace
SystemNamespace
/rtemsapp. user.so. user.exe. user.svt..../config..../rtems
sys.svt app.svt
rtems.so dsl.sorts.so xaui.soshell.so sas.so
These files have shared ownership by Applications and System
These files are System owned
These types of files are owned by Applications

Core Utilities

18
Core Utilities - Memory Management
The Core provides the following memory management features
• Separate memory regions each with a unique set of MMU
attributes- Read/write/execute
- 4k or 1Mbyte page size
- Cacheability
• Allocations from managed regions
• Region address lookup by name
• Cache operations- Flush
- Invalidate
• Atomic Resource Management- Allocate memory resources reentrantly

19
Core Utilities - Task Management
• A Core Task is defined as a pure RTEMS task along with its
corresponding dynamically loaded/linked executable code.
• The Core provides the infrastructure to dynamically load and
link executable shared images using namespaces- This occurs before its corresponding RTEMS task is started
• Task Control- Start
- Stop

20
Core Utilities - Symbol Value Tables
• Loading and installation of SVT shared images
• Symbol translation- Resolves the object pointer corresponding to the symbol
• System and application SVTs are loaded at Core initialization- These SVTs are available for immediate use by applications and
do not need to be explicitly installed.

21
Core Utilities - Tools
The Core provides additional low level utilities for general
use:
• Linked lists
• Key value tables
• Byteswap routines
• ELF image utilities
• Hash tables
• System logging

System Libraries

23
System Libraries - Runtime Support
The runtime services library, rts.so, provides full C++ support
and the following features
• System message logging classes
• Exception classes
• String utilities

24
System Libraries – Distributed Services Lookup
Distributed Services Library, or DSL (dsl.so) represents a
lightweight client server model
• Resolves a service name string to a shareable image
• Lazy deferral of image loading
• Host side and embedded interfaces
• Host side client message is delivered over ethernet
• Server executes entry point in registered service library, with
the message as an argument
• Service processes the message and returns a response to
the Server
• The Server delivers the service specific response to the client

25
System Libraries - ATCA
The ATCA library (atca.so) is a registered DSL service.
• Server side component “looks up” networking information
corresponding to an ATCA location- IP address
- MAC address
• Host side client interface allows for building of requests and
processing of server side responses
• Requests are broadcast to all servers on a given subnet.
• Only the node that has the matching ATCA address will
respond to the request.

Configuration

27
System Configuration - SVT
Components of the Core and system services are configured at
startup using the SVT mechanism (sys.svt). The system
configuration is owned by the RPT and is suitable for most
deployments.
• System task specifications- Console
- DSL
• Network stack configuration
• Telnet configuration
• System DSL definitions (currently only ATCA)

28
Application Configuration - SVT
Activation of system services is configured at startup using the SVT
mechanism (app.svt). This is considered to be jointly managed by the
system and applications. Applications may tailor the service set to its
needs, but the svt filename and location is fixed and must be present
in order for the system to successfully boot.
• Services to start at boot- Console
- Shell
- Network Driver
- NFS
- DSL
• Activation of DSL services- ATCA service is required by the system
• Activation of user application specific image- appinit.so

29
Application Initialization
At the completion of starting up system services, application
code can then be conditionally loaded. The supported method
is to create a dynamic image named appinit.so, install it in the
rtemsapp partition, and add it to the services portion of app.svt.
The appinit.so image can be tailored to the needs of the
applications.
• Define application specific namespaces
• Mounting of scratch filesystem
• Mounting of NFS directories
• Loading and activation of application executable images
• Any other required initialization

RCE Software Development Kit (SDK)

31
RCE Software Development Kit - SDK
The SDK contains host side utilities to interact with a running
RCE Core, but its primary focus is to build shareable images
for test and deployment in embedded execution environments.
Execution environments are the pairing of an operation system
with a hardware platform. Here, these are referred to as the
target (ARM RTEMS RCE) and host (I86 Linux 32/64).
• C/C++ code must be cross compiled on the host for
execution on the target.
• C/C++ code may be compiled natively for execution on the
host.

32
SDK Development Model
Both the SDK and the Core runtime environment contain
support for developing software with speed and agility. The
phases presented here were employed by the RPT group in
the development of RCE system images, and constitute our
recommended methodology.
• Shareable image implementation
• Test and debug
• Image deployment and installation

33
RCE Software Development Kit - SDK
Host System Target System
Filesystem
SDK1) Compile source files against
SDK include files (produces *.o)
2) Link object code against SDK libraries (produces *.so, *.exe, or *.svt)
Filesystemscp
(Linux)
orNFS mount
.so
.exe
.svt
.so
.exe
.svt
Runtime Core• Runtime Core provides the
dynamic linker/loader to activate shareable images from the target filesystem

34
SDK Development Model – Implementation
• Develop source code, compile, and link shareable images.
• Takes place on a supported Linux host machine
• Software can first be prototyped using native host compilers
• Allows images to be partially tested and debugged prior to
cross compilation (algorithmic routines, data structures).
• Creation of application specific .exe .so and .svt images
• Images can be examined for size constraints and machine
code optimization using standard ELF utilities.

35
SDK Development Model – Test and Debug
• Cross compiled images are executed on the target using NFS
mounted directories mapped to namespaces
• Library loading and executable activation using shell utilities
• Debugging using the console or telnet shell
• Application images are not required to reside on the target
filesystem
• Does not affect deployed software.

36
SDK Development Model – Deployment
• At this phase, images are fully tested and ready to be deployed
to the target filesystem.
• Configuration and initialization components on the deployed
system are updated to support activation of new images from
the target resident filesystem- SVT configuration files and/or application specific initialization
libraries must be updated to map namespaces, task start directives,
and any explicit library loads required for the new images.
• Images are copied to the appropriate directories on the target
filesystem
• Images are activated at startup, after system services are
available.

37
RCE Software Development Kit - Contents
• RTEMS SDK- RTEMS cross compilers
- Core and service libraries to link code against
- Header files
- Bootloaders
- Firmware bitfiles
• I86 Host Linux SDK- Host development header files and libraries
- Administration and maintenance tools
• ArchLinux SDK- Utilizes Xilinx tools
- Cross-development for execution on an embedded linux platform
- Work in progress

38
RCE Software Development Kit
• Must be integrated into existing build systems- Compilers and linkers sourced from SDK installation path
- Include files - use –I on the compiler command line
- Library paths - use –L: or –l linker command line
• A single SDK installation may be shared by one or more
developers

39
RTEMS SDK Compilers and Linkers
The SDKs make use of the RTEMS cross-compiler tools and
native gcc installations. SDK compilers and linkers are
essentially wrappers around these tools. The wrappers contain
the command line arguments required to support the dynamic
image format used by the Core runtime. User specific
arguments are appended to the default SDK arguments.
• SDK RTEMS Compilers- rtems-gcc, compile C object code
- rtems-g++, compile C++ object code
• SDK RTEMS Linkers- rtems-ld, link object code into shareable images (.so)
- rtems-task, link object code into task images (.exe)
- rtems-svt, link object code into symbol value tables (.svt)

40
I86 Linux Host SDK Compilers and Linkers
Host executables and libraries can be compiled using an SDK.
In this case, the SDK commands are merely indirections to the
native gnu tools.
• Host Linux SDK Compilers- linux-gcc
- linux-g++
• Host Linux SDK Linkers- linux-ld

Protocol Plugin Software

42
Protocol Plugin Support – SAS (I)
Support for the software side of the protocol plugin socket is handled
by the Socket Abstraction Services (SAS). The implementation is
provided by the service library sas.so.
SAS interacts with plug-in firmware by reading and writing AXI
memory mapped I/O addresses.
SAS exposes plug-in functionality using mailboxes. A mailbox is a
container, implemented in firmware which obeys FIFO (first-in, first-
out) discipline. A mailbox contains file descriptors or messages.
• SAS supports three type of mailboxes.- Inbound mailboxes
- Outbound mailboxes
- Unnamed mailboxes

43
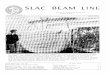
Protocol Plugin Support – SAS (II)
…
Task
Ob Mbx
Ib Mbx
Mbx 0
Mbx 31
Session
Plug-in Port
FIFO
FIFO
FIFO
FIFO
SAS

44
Protocol Plugin Support – SAS (III)
SAS uses sessions to wait for input from mailboxes.
• A session is the association of software with a socket.
• Mailboxes are bound to sessions at runtime.
The types of mailbox input are:
• Arrival of an inbound frame- 32-bit SAS file descriptor
• Notification of placement of an inbound frame- 32-bit SAS message
• Notification of placement of an outbound frame- 32-bit SAS message
Waiting on input from a session is always done in the context of a task. A session is
associated with a task.
• Processing of inbound frames use two sessions1. Wait for the arrival of an inbound frame descriptor.
- Also used to post a file descriptor to initiate placement of inbound frame payload
2. Wait for the completion of placement of an inbound frame
• Transmission of an outbound frame uses one session:1. Wait for the completion of placement of the outbound frame

Thank You. Questions?

Backup Slides

47
RCE Software – SD Storage
All software images reside on an SD flash. The 32 GB (27.9 usable) microSD is formatted
with 6 partitions
• Boot - /boot- Bootloader files boot.bin, fpga.bit, uboot.env
- 512 MB FAT32
• RTEMS system - /rtems- The Core, service libraries, system executables
- 512 MB FAT32
• RTEMS application - /rtemsapp- Application specific images
- System/application shared configuration
- 4GB FAT32
• user/application scratch - /scratch- 16 GB FAT32
• Linux Kernel - /linux- System maintenance/recovery
- 512 MB FAT32
• ArchLinux Filesystem - /archlinux- System maintenance/recovery
- 8 GB EXT3

48
RCE Bootstrap Process
• Xilinx first stage bootloader (FSBL)- SOC initialization
- CPU register configuration
• U-Boot- Xilinx distribution includes Zynq hardware support
- Firmware bitfile loader
- BSI handshake – IPMI ready signal
- Networking parameter configuration
- Rescue operations
• Core bootstrap- Board support package, MMU, and kernel initialization
- Relocation/fixup of Core elf image
- Kernel initialization - RTEMS
- Memory and driver initialization
- Loading of system and application SVTs
- System service load and startup
- Application load and startup (optional)

49
Protocol Plugin Support – SAS Configuration
SAS configuration for protocol plugins is defined in an SVT file.
• Inbound/outbound header sizes
• Inbound/outbound buffer count
• Plugin name
• Memory map for plugin register space

50
Protocol Plugin Support – Firmware Registers
Most plugin firmware will expose a set of configuration
registers. This register block is typically mapped to memory
locations in the AXI space.
• SAS interface to configure the AXI register address mapping
• SAS interface to retrieve a pointer to the memory mapped
register block.

51
Protocol Plugin Support - XAUI
Plugin software has been implemented using SAS to support
the operation of the XAUI plugin. This plugin is used by system
software to enable 10-GE TCP/IP stack. The plugin also
supports transmit and receive by other applications that need
to take advantage of the high speed link using other protocols.
• Data receive enabled by registering a protocol callback
routine with the XAUI driver.
• Data transmit is performed by directly posting to the XAUI
SAS outbound mailbox.