Embed Size (px)
Citation preview

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Linac Coherent Light Source (LCLS)
Low Level RF System
Injector Turn-on December 2006
April 20, 2006

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Safety First and Second and Third…..to Infinity
Hazards in the LLRF systemRF 1kW at 120Hz at 5uS = 0.6 Watts average, 2 Watt average amps at 2856MHz, 60W average amps at 476MHz
Hazards – RF BurnsMitigation – Avoid contact with center conductor of energized connectors. All employees working with LLRF systems are required to have the proper training.
110VAC ConnectorHazards - Shock Mitigation - Don’t touch conductors when plugging into outlet.All chassis are inspected by UL trained inspector.

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Scope of Work – Injector Turn-onLinac Sector 0 RF Upgrade WBS 1.02.04.03.01
All 3 RF Chassis completed and InstalledControl Module ready for test – John Dusatko
Sector 20 RF distribution system WBS 1.02.04.03.02Phase and Amplitude Controllers (PAC) – 6 units in DesignPhase and Amplitude Detectors (PAD) – 1 unit in DesignPhased Locked Oscillator – Use SPPS unit for Turn OnLO Generator – Design 90% Complete and testedMultiplier – 476MHz to 2856MHz – Complete4 distribution chassis - CompleteLaser Phase Measurement – in Design – not required for turn on
LLRF Control and Monitor System WBS 1.02.04.03.031 kW Solid State S-Band Amplifiers – 5 units – in Fab, 2 donePAD – 12 units as above in designPAC – 6 units as above in designBunch Length Monitor Interface – awaiting Specs
Beam Phase Cavity WBS 1.02.04.03.04Will use single channel of PAD ChassisPill box cavity with 2 probes and 4 tuners - Complete next month

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LCLS Layout
P. Emma

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LLRF Control system spans Sector 20 off axis injector to beyond Sector 30

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LCLS RF Jitter Tolerance BudgetLCLS RF Jitter Tolerance Budget
RMS tolerance budget for <12% rms peak-current jitter or
<0.1% rms final e− energy jitter. All tolerances are rms levels and the voltage and
phase tolerances per klystron for L2 and L3 are Nk larger,
assuming uncorrelated errors, where Nk is the number of
klystrons per linac.
P. Emma
Lowest Noise Floor Requirement 0.5deg X-Band = 125fSStructure Fill time = 100nSNoise floor = -111dBc/Hz @ 11GHz 10MHz BW-134dBc/Hz @ 476MHz
X-bandX-band XX--
0.500.50

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Slow Drift Tolerance LimitsSlow Drift Tolerance Limits
Gun-Laser TimingGun-Laser Timing 2.4*2.4* deg-Sdeg-S
Bunch ChargeBunch Charge 3.23.2 %%
Gun RF PhaseGun RF Phase 2.32.3 deg-Sdeg-S
Gun Relative VoltageGun Relative Voltage 0.60.6 %%
L0,1,X,2,3 RF Phase (approx.)L0,1,X,2,3 RF Phase (approx.) 55 deg-Sdeg-S
L0,1,X,2,3 RF Voltage (approx.)L0,1,X,2,3 RF Voltage (approx.) 55 %%
(Top 4 rows for (Top 4 rows for // < 5%, bottom 4 limited by feedback dynamic range) < 5%, bottom 4 limited by feedback dynamic range)
* for synchronization, this tolerance might be set to * for synchronization, this tolerance might be set to 1 ps (without arrival-time measurement)1 ps (without arrival-time measurement)
(Tolerances are peak values, not rms)(Tolerances are peak values, not rms) P. Emma, J, WuP. Emma, J, Wu

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
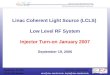
Linac Sector 0 RF Upgrade
PEP PHASE SHIFT ON MAIN DRIVE LINE MDL RF with TIMING Pulse – Sync to DR
Master Oscillator is located 1.3 miles
from LCLS Injector
1.3 Miles to LCLS Injector
LCLS must be compatible with the existing linac operation including PEP timing shifts
MASTERAMPLIFIERS
MAIN LINAC (SECTOR 0) RF/TIMING SYSTEM
1
476MHzMASTEROSCILLATOR
PEP PHASESHIFTER+-720 Degreesin 0.5mS
SLC COUNTDOWNCHASSIS 476MHzDivide to 8.5MHz
Master TriggerGenerator MTGSyncs Fiducial to8.5MHz Damping Ringand 360Hz Power Line
8.5MHz
360Hz LineSync.
476MHz
360Hz
Fiducial GeneratorSyncronized to:360Hz Power Line8.5MHz Damping Ring476MHz RF Distribution
SumFiducialto RF
Main Drive Line (MDL)476MHz RF plus360Hz FiducialTo:Main Linac - 2 milesDamping RingsPEPNLCTAEnd Station AFFTBORION
Measurements on January 20, 2006at Sector 21show 30fS rms jitter in a bandwidth from 10Hz to 10MHz

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Linac Sector 0 RF Upgrade Status
New Low Noise Master Oscillator – Done
New Low Noise PEP Phase ShifterRF Chassis – Done
Control Chassis – In Test
New Low Noise Master Amplifier – Done
Main Drive Line Coupler in Sector 21 – Done
Measurements Noise floor on 476MHz of -156dBc/Hz
Integrated jitter from 10Hz to 10MHz of 30fS

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
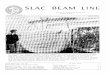
Sector 20 RF Distribution
Phase Critical Cables
Laser <140ft < 700fSpp
Gun < 100ft < 400fSpp
RF CONTROLOffset adjust
2830.5MHz LO Gen
RF MONITOR119MHz Phase
119MHz
Main Drive Line (MDL)476MHz RF360Hz FiducialFrom Sector 0 (2km)
RF HUT Coupler476MHz Ref. 100uW
LASER
LCLS 476MHz PLL
LCLS Sector 20 RF Reference System
4x 476MHz13dBm OUT
TIMING SYSTEMFIDO
476MHz to 2856MHzMULTIPLIER
120HzTRBR
2856MHz16 Way Distribution20dBm each
+13dBm in
2856MHzLASER DiodePhase NoiseMeasurement
Track/HoldTRBR
+7dBm
+17dBm
2856MHz2Watt Amplifier
102MHzDigitizer Clocks16 Way Distribution20dBm each Gun
L0AL0BL0TCAVL1SL1X
476MHzLASER LOCKReference
RF MONITOR
119MHz0dBm OUT
Diode Detector
LASER DiodeOutput
IQ Modulator ControlMixer Monitor
102MHz2Watt Amplifier
RF MONITOR
RF CONTROLIQ Modulator
LO Phase Monitor
Sample and Hold PLLwith DAC offset adjustand Error Monitor
GunL0AL0BL0TCAVL1SL1XLINACEXPERIMENTS
2856MHz
RF CONTROLIQ Modulator
2830.5MHz2Watt Amplifier
2830.5MHz LO16 Way Distribution20dBm each
476MHz to 2856MHzMULTIPLIER
GunL0AL0BL0TCAVL1SL1X
2856MHz in
IQ Modulator to adjust2830.5MHz to 2856MHz Phase
Divide 112 to 25.5MHzSSB Mix to 2830.5MHz4X to 102MHz
25.5MHz out
102MHz out 2830.5MHz out
Diode Detector
RF CONTROLIQ Modulator
Diode Detector
RF CONTROLIQ Modulator
LO Phase Monitor
+13dBm in
+7dBm
LO Phase Monitor
+17dBm
RF MONITOR
RF CONTROLIQ Modulator
MDL to Linac Sectors 21 to 30PEP and Research Yard
RF MONITOR
FSJ4-50 0.8dB/30ft
2856MHz from Sector 21

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Sector 20 RF Distribution System StatusPhase Locked Oscillator – 476MHz
Initial Turn On use SPPS OscillatorMay modify control to achieve better stability during 2007
LO Generator – 2830.5MHzDesign complete – Prototype tested – 25MHz SSB modulator board done2856MHz IQ Modulator prototype near completion
Multipliers - 476MHz to 2856MHz – DonePhase and Amplitude Control (PAC) Unit
In Design – IQ Modulators and Amplifiers selected – See Next Section
Phase and Amplitude Detector (PAD) UnitIn Design – Testing Mixers, Amplifiers, Filters – See Next Section
Amplifiers – not ordered yetLaser Phase Measurement System – Design Started

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LLRF Control System
Distributed Control System
Microcontroller based IOC Control and Detector Modules
Ethernet Switch
Central Feedback Computer

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LLRF Control and Monitor System Klystron Station
13dBm
17dBm
SPARE
KLYSTRON STATION
23dBm
240ft = 17dB 1/2 Superflex= 10dB LDF4
240ft = 2.5dB 1/2 Superflex= 1.6dB LDF4= 3dB LDF1
3dBm
3dBm
140ft = 25dB 3/8 Superflex
Coupled Out
ENET
TRIG
TRIG
ENETLCLS RF HUT2830.5MHz LOAmp / Splitter
TCAV
RF Gun
L0A
L0B
L1S
L1X
RF HUT
PAC
20-5
20-6
20-7
20-8
21-1
21-2
LCLS RF HUT2856MHz RFAmp / Splitter
TCAV
RF Gun
L0A
L0B
L1S
L1X
20-5
20-6
20-7
20-8
21-1
21-2
LCLS RF HUT102MHz ClockAmp / Splitter
TCAV
RF Gun
L0A
L0B
L1S
L1X
20-5
20-6
20-7
20-8
21-1
21-2
PAD
In 2856MHz Out
102MHz Clock In
Trig & Ethernet
SSSB
102MHzClock In Out
LO
Trig & Ethernet
To IPAKlystron Drive
In 2856MHz Out
SSSB Control Control & TRIG
From Klystron Drive Coupler
KLY BEAM Voltage
PAC OUT
Coupled Out

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LLRF Control and Monitor System Status
1 kW Solid State S-Band Amplifiers – 5 units1kW amplifier modules currently in test
Existing amplifier support design under review
Phase and Amplitude Detectors – 11 dual chan unitsPreliminary Design Complete
Evaluating amplifiers, mixers, and filters
Phase and Amplitude Controllers – 6 single chan unitsPreliminary design complete
Evaluating mixers and amplifiers
Bunch Length Monitor InterfaceNeed Specifications

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Beam Phase Cavity Status
Electronics will use single channel of PAD ChassisPill box cavity with 2 probes and 4 tuners
Cavity Electronics will use single channel of RF MonitorCavity in fabricationComplete – May 2006Bake – June 2006
Measurement of beam phase to RF reference phase. The result will be used to correct timing of laser to RF reference. Cavity is located between L0A and L0B.

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Controls Engineering Requirements
When beam is present, control will be done by beam-based longitudinal feedback (except for T-cavs); when beam is absent, control will be done by local phase and amplitude controller (PAC)
Adhere to LCLS Controls Group standards: RTEMS, EPICS, Channel Access protocol
Ref: Why RTEMS? Study of open source real-time OS
Begin RF processing of high-powered structures June 2006

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
External Interfaces
LLRF to LCLS global control system PVs available for edm screens, archiving, etc over controls network
LLRF VME to beam-based longitudinal feedback from feedback: phase and amplitude corrections at 120 Hz over private ethernet from LLRF: phase and amplitude values
(internal) LLRF VME to LLRF microcontrollers from VME: triggers, corrected phase and amplitude from microcontrollers: phase and amplitude averaged values at 120 Hz, raw phase and amplitude values for diagnostics

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Sector 20 PAC and PAD Control
VME IOC
Ethernet Switch
Arcturus Coldfire13 PADs
FIFO
ADC
13 PACsFPGA
DAC

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
EPICS PANELS
Single Pulse Diagnostic Panels for PADs are RunningRemaining Software
History Buffer Select PVsMulti pulse data analysis, correlation plotsLocal RF Feedback loopsLinks to global Feedback loops

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
RF Status SummaryLinac New Low Noise Source – RF components installed, Controls Feb06RF Distribution – Prototyping underway (R. Akre, B.Hong, H. Schwarz)Monitor Controller Board (J. Gold, R. Akre, Till Straumann)
Single channel prototype for ADS5500 tested to specificationsFour channel ADS5500 board – layout complete (SNR 70dBFS)Switched to LTC2208 16bit 130MSPS ADC (Prototype in test) (SNR 77dBFS)
RF Monitor Board in preliminary design (H. Schwarz, B.Hong)Testing mixers
Control Boards (J. Olsen)Fast Control Board – All but slow ADCs for temp and voltages tested and low level drivers writtenSlow control board – use fast board
RF Control Board in preliminary design (H. Schwarz, B. Hong)Software (D. Kotturi, Till Straumann)
EPICS on RTEMS on Microcontroller doneDrivers – data collection interrupt routine doneAlgorithms – PAD 90% complete PAC in progressCalibration routines – Need specificationsCollision free Ethernet

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LLRF ScheduleRF Distribution Design Complete May 2006RF Hut Distribution System installed August 2006PAC design Complete June 2006PAD design Complete July 2006PAC and PAD minimal operational software completeEthernet testing with multiple PACs and PADs???Single S-Band station – hardware installed Sept 20064 other S-Band Stations – November 2006Feedback software interfacing???Test and debug with Klystrons On – December 2006X-Band Station January 2007

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
End of LLRF RF TalkBackup for RF Talk
Mostly Correct

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
DESIGN PHILOSOPHY
Reliability is inversely proportional to the number of connectors.
Stability is inversely proportional to the number of connectors.
Measurement accuracy is inversely proportional to the number of connectors and the amount of Teflon,which is typically found in connectors.
Cost of maintenance is proportional to the number of connectors.

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Electro-Optical SamplingElectro-Optical Sampling
170 fs rms170 fs rms
Single-ShotSingle-Shot
Timing JitterTiming Jitter(20 Shots)(20 Shots)
200 200 m thick ZnTe crystalm thick ZnTe crystal
ee
Ti:Sapphire Ti:Sapphire laserlaser
Adrian Cavalieri et al., Adrian Cavalieri et al., U. Mich.U. Mich.
<300 fs<300 fs
ee temporal information is encoded on temporal information is encoded on transverse profile of laser beamtransverse profile of laser beam

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
MPS – PPS Issues Addressed by Controls Group
Not Reviewed Here Vacuum
New vacuum system summary to be fed to each klystron existing MKSU.
PPS SystemInjector modulators will be interlocked by Injector PPS system.PPS requirements for radiation from the injector transverse accelerator needs to be determined. Radiation levels will be measured during testing in the Klystron Test Lab – Feb 06.

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Bandwidth of S-Band System
Upper Frequency Limit – 10MHzBeam-RF interaction BW due to structure fill time
< 1.5MHz S-Band Accelerators and Gun
~10MHz X-Band and S-Band T Cav
Structure RF Bandwidth ~ 16MHz
5045 Klystron ~ 10MHz
Lower Frequency Limit – 10kHzFill time of SLED Cavity = 3.5uS about 100kHz
Laser – Needs to be measured ~ 10kHz

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Noise LevelsRF Reference Single Side Band (SSB) Noise Floor
2856MHz RF Distribution -144dBc/Hz-174dBc/Hz @ 119MHz (24x = +28dB +2 for multiplier)
2830.5MHz Local Oscillator -138dBc/Hz
Integrated Noise-138dBc/Hz at 10MHz = -65dBc = 32fS rmsSNR = 65dB for phase noise
Added noise from MIXER (LO noise same as RF)SNR of 62dB
ADC noise levelsSNR of 70dB – 14bit ADS5500 at 102MSPS

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Phase Noise – Linac Sector 0
OLD MASTER OSCILLATOR-133dBc/Hz at 476MHz 340fSrms jitter in 10MHz BW
NEW MASTER OSCILLATOR-153dBc/Hz at 476 MHz34fSrms jitter in 10MHz BW
Integrated Noise - Timing Jitter fs rmsIntegral end 5MHz 10kHzIntegral start 1M 100k 10k 1k 100 10Aug 17, 2004Sector 30 27 30 33 38 75 82Jan 20, 2006Sector 21 15 19 20 20 8 17

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Sector 20 RF Distribution Cable ErrorsTemperature Coefficient of 2.8ppm/ºF and Cable length is 1200ºS/ftAll Cables except LASER are less than 100ft
Distances feet and errors in degrees S total range
RF Hut Down Linac Wall Injector TotalUnit Ft degS ft degS ft degS ft degS ft degS DegSLaser 8 0.054 25 0.017 10 0.014 10 0.007 85 0.58 0.68Gun 8 0.054 25 0.017 10 0.014 10 0.007 40 0.27 0.37L0-A 8 0.054 25 0.017 10 0.014 10 0.007 30 0.21 0.31B Phas 8 0.054 25 0.017 10 0.014 10 0.007 20 0.14 0.24L0-B 8 0.054 25 0.017 10 0.014 10 0.007 20 0.14 0.24L0-T 8 0.054 25 0.017 10 0.014 10 0.007 10 0.07 0.17L1-S 8 0.054 25 0.017 50 0.068 0.14L1-X 8 0.054 25 0.017 60 0.081 0.16Temperature Variations: RF Hut ±1ºF : Penetration ±0.1ºF : Linac : ±0.2ºF
Shield Wall ±0.1ºF : Injector ±1ºF

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
RF System Topology / Specifications
476MHz PLL2830.5MHz LOAmp / Splitter
Laser
RF Gun
L0A
Phase Cavity
L0B
L1S
L1X
L2 Ref
PAD
Laser
RF Gun
L0A
Phase Cavity
L0B
L1S
L1X
L2 Ref
Most Devicesare in tunnel
Laser
RF Gun
L0A
Phase Cavity
L0B
L1S
L1X
L2 Ref
1
Number of cables per deviceReference cables are8ft and can drift +-50fS
1
2
4
2
2
2
5
RF HUT
+-240fS
+-310fS
+-370fS
+-680fS
+-500fS
+-160fS
+-140fS
+-240fS
Cable Drift Based onTemperature variationsand temp co of 5ppm/degC
LinacSector 0 RF
MDL
L2 - 4 SectorsSpecifications70fS rms jitter+-5pS drift
L3 - 6 SectorsSpecifications150fS rms jitter+-5pS drift
L0, L1 - 5 KlystronsSpecifications100fS rms jitter+-2.3pS drift

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
RF Monitor Signal CountsADC Chan Cnt Chassis
Count/LocationDistribution (5~2850MHz, 4<500MHz) 4 1HutRF Gun 9 1Kly 1.5HutBeam Phase Cavity 2 0.5HutL0-A Accelerator 4 1Kly 0.5HutL0-B Accelerator 4 1Kly 0.5HutL0-T Transverse Accelerator 4 1Kly 0.5HutL1-S Station 21-1 B, C, and D Acc 6 1Kly 1.0HutL1-X X-Band accelerator X-Band 5 1Kly 0.5HutS25-Tcav 4 1KlyS24-1, 2, & 3 Feedback 0S29 and S30 Feedback 0
Total Chassis 7Kly 6HutTotal into Hut IOC 12

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
RF Control Signal CountsDistribution (3~2850MHz, 3<500MHz) 6 IQ ModRF Gun 1 Klystron Beam Phase Cavity 1 IQ modL0-A Accelerator 1 KlystronL0-B Accelerator 1 KlystronL0-T Transverse Accelerator 1 KlystronL1-S Station 21-1 B, C, and D accelerators 1 Klystron
L1-X X-Band accelerator X-Band 1 IQ ModS25-Tcav 1 KlystronS24-1, 2, & 3 Feedback 3 KlystronsS29 and S30 Feedback 2 IQ modulators 476MHz
Total modulators 11 Fast 8 Slow 19 modulatorsTotals at ~2856MHz 14 modulatorsTotal into Hut IOC 14 modulators

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LLRF Control and Monitor System
LLRF Control and Monitor System1 kW Solid State S-Band Amplifiers – 5 units
Phase and Amplitude Monitors – 12 units
Phase and Amplitude Controllers – 6 units
Bunch Length Monitor Interface – Need Specifications

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
RF Control
RF Control Module consist of the following:
Input Coupler, IQ Modulator, Amplifier, Output Coupler
Filters for I and Q inputs
I
RFLO
Q
1
2
34
BXMP1007
2856MHz Input Monitor 2856MHz Output Monitor
Q Control
RF InRF Out
I Control
17dBm 0dBm
2850MHz IQ Modulator
17dBm
Required 13 UnitsIncludes Distribution

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
RF MonitorRequired 13 Chassis for Injector – Includes DistributionLO 2830.5MHz : RF 2856MHzIF 25.5MHz (8.5MHz x 3 in sync with timing fiducial)Double-Balanced MixerMixer IF to Amp and then Low Pass FilterFilter output to ADC sampling at 102MSPS
MIXER
LOR
F IF
Amplifier
25.5MHz BP FILTER
2830.5MHz Local Osc.
2856MHz RF Signal
To ADC
LTC2208 SNR = 77dBFS
102MSPS

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
1 kW Solid State S-Band Amplifiers
Design Complete Two Units on the ShelfModules in house – and testedSupport parts – Some parts in house
Power Supplies, relays, chassis on order

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
SLAC Linac RF – New ControlThe new control system will tie in to the IPA Chassis with 1kW of drive power available. Reference will be from the existing phase reference line or the injector new RF reference
I and Q will be controlled with a 16bit DAC running at 119MHz. Waveforms to the DAC will be set in an FPGA through a microcontroller running EPICS on RTEMS.
Existing System Accelerator
Klystron
Next Sector
MDL 476MHz
SubBooster
6 X2856MHz
Sub Drive Line
High PowerPhase ShifterAttenuator
SLED
Phase &AmplitudeDetector
ExistingPhaseReferenceLine
-45dB200MW
3kW
20mW
1W1mW
To NextKlystron
I
RF LO
Q
1
2
3
4
IQ Modulator
1kW Amp2856MHz
IPA

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
LLRF Controls
OutlineRequirementsExternal InterfacesSchedule
Date NeededPrototype Completion DateHardware Order DateInstallationTest Period
Design Design Maturity (what reviews have been had) State of Wiring Information State of Prototype

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Requirements
At 120 Hz, meet phase/amp noise levels defined as:
0.1% rms amplitude 100 fs rms in S-band (fill time = 850 ns) 125 fs rms in X-band (fill time = 100 ns)All tolerances are rms levels and the voltage and phase tolerances per klystron for L2 and L3 are Nk larger, assuming uncorrelated errors, where Nk is the number of klystrons per linac (L2 has 28; L3 has 48)

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Engineering Requirements
When beam is present, control will be done by beam-based longitudinal feedback (except for T-cavs); when beam is absent, control will be done by local phase and amplitude controller (PAC)
Adhere to LCLS Controls Group standards: RTEMS, EPICS, Channel Access protocol
Ref: Why RTEMS? Study of open source real-time OS
Begin RF processing of high-powered structures May 20, 2006

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
External Interfaces
LLRF to LCLS global control system PVs available for edm screens, archiving, etc over controls network
LLRF VME to beam-based longitudinal feedback from feedback: phase and amplitude corrections at 120 Hz over private ethernet from LLRF: phase and amplitude values
(internal) LLRF VME to LLRF microcontrollers from VME: triggers, corrected phase and amplitude from microcontrollers: phase and amplitude averaged values at 120 Hz, raw phase and amplitude values for debug

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
External Interfaces: Laser - Tcav
I and Q Demo-dulator
CPU
FIFOs
DAC
slow
Temperature monitors
EVR
Laser and RF ref
L0-AL0-B
L1-SL1-X
T Cav
gun
Controls gigabit ethernet (interface to MCC)
Private ethernet8 kBytes at 120 Hz
PAD
ADC
FPGADAC
1 trigger for 4
channels of 1k
samples
Private ethernet4 kBytes at 120 Hz
In-house modules sharing VME crate for timing triggers
476 MH
z RF R
eferen
ce clo
ck dis
tribute
d to all
30 se
ctors i
n the L
inac a
nd bey
ond
RF Reference/4 = 119 MHzstabilized to 50 fs jitter
RF Reference*6 = 2856 MHzstabilized to 50 fs jitter
Coldfire CPU
running RTEMS
and EPICS
Coldfire CPU
running RTEMS
and EPICS
PAC
RF Phase and Amplitude correction at 120 Hz for:laser, gun, L0-A, L0-B, L1-S, L1-X, T cav
10' accelerator
IQ Modulator gives phase
and amplitude control
1 kW 1 kW
Solid State Sub Booster
Klystron
SLED cavity
60 MW
HPRF240 MW
60 MW
1 kW
All except laser RF
100 mW
119 MHz Laser
Oscillator
Amps
GunNB: For the gun, SLED
cavity is shorted out
119 MHz120 Hz
UV
photodiode
photodiode
1 trigger to travel up to ½ sector
away
DAC
slow
VME Crate at S20 running
longitudinal, beam-based
feedback
Private ethernet

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
External Interfaces: L2-L3
I and Q Demo-dulator
CPU
FIFOs
DAC
slow
Temperature monitors
EVR
Laser and RF ref
L0-AL0-B
L1-SL1-X
T Cav
gun
Controls gigabit ethernet (interface to MCC)
Private ethernet8 kBytes at 120 Hz
PAD
ADC
FPGADAC
1 trigger for 4
channels of 1k
samples
Private ethernet4 kBytes at 120 Hz
In-house modules sharing VME crate for timing triggers
476 MH
z RF R
eferen
ce clo
ck dis
tribute
d to all
30 se
ctors i
n the L
inac a
nd bey
ond
RF Reference/4 = 119 MHzstabilized to 50 fs jitter
RF Reference*6 = 2856 MHzstabilized to 50 fs jitter
Coldfire CPU
running RTEMS
and EPICS
Coldfire CPU
running RTEMS
and EPICS
PAC
RF Phase and Amplitude correction at 120 Hz for:laser, gun, L0-A, L0-B, L1-S, L1-X, T cav
10' accelerator
IQ Modulator gives phase
and amplitude control
1 kW 1 kW
Solid State Sub Booster
Klystron
SLED cavity
60 MW
HPRF240 MW
60 MW
1 kW
All except laser RF
100 mW
119 MHz Laser
Oscillator
Amps
GunNB: For the gun, SLED
cavity is shorted out
119 MHz120 Hz
UV
photodiode
photodiode
1 trigger to travel up to ½ sector
away
DAC
slow
VME Crate at S20 running
longitudinal, beam-based
feedback
Private ethernet

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
DesignDesign maturity (what reviews have been had):
RF/Timing Design, DOE Review, August 11, 2004 Akre_FAC_Oct04_RF_Timing, FAC Review, October, 2004 Low Level RF Controls Design, LCLS Week, January 25-27, 2005 Low Level RF, Lehman Review, May 10-12, 2005 LLRF Plans for Development and Testing of Controls, LCLS Week, July 21, 2005 Low Level RF Design, Presentation for Controls Group, Sept. 13, 2005 LLRF Preliminary Design review, SLAC, September 26, 2005 LCLS LLRF Control System - Kotturi, LLRF Workshop, CERN, October 10-13, 2005 LCLS LLRF System - Hong, LLRF Workshop, CERN, October 10-13, 2005 LLRF and Beam-based Longitudinal Feedback Readiness - Kotturi/Akre, LCLS Week, SLAC, October 24-26, 2005 LCLS Week LLRF and feedback - Kotturi/Allison, LCLS Week, SLAC, October 24-26, 2005 LLRF, LCLS System Concept Review/Preliminary Design Review, SLAC, November 16-17, 2005 Comments LLRF Beam Phase Cavity Preliminary Design review, SLAC, November 30, 2005
Docs at: http://www.slac.stanford.edu/grp/lcls/controls/global/subsystems/llrfState of wiring: percent complete Captar input will be given at time of presentation State of prototype: PAD (1 chan ADC) and PAC boards built (shown on next pages).Testing.

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
PAD – the monitor board

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
PAD – the monitor board
2 X 16 bit ADC119 or 102MHz ClockLTC2208Transformer Coupled Inputs
Chan. 2
Chan. 1
FIFO 2 X 1k words
WCLK
16bit DATA
16bit DATA
WCLK
RF CHAN 1INPUT
RF CHAN 2INPUT
Line DriversFilters
MIXER
LORF
IF
MIXER
LORF
IF
RF Board
25.5MHz IF
Control Board
Control
EXTERNALTRIGGER120Hz
EXTERNALCLOCK102MHz
CS/CLK
16 bitDATA
CONTROL /Arcturus uC5282Microcontroller Modulewith 10/100 Ethernet
ET
HE
RN
ET
LO INPUTRF - 25.5MHz
CPLD

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
PAC – the control board

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
PAC – the control board
SSSBChassis
Temperature MonitorForward Power 0-?VReflected Power 0-?VOver Temp 0 or 12V Power Supplie +12VPower Supply -12V
I
R F L O
Q
I&Q MODULATOR
1
2
3
4
MAX58752 X 16 bit DAC119MHz Clock(1MHz to 200MHz)
I
Q
XILINXSPARTAN 3FPGA
16bit DATA
CS/CLK
16bit DATA
16 bitDATA
CLK
CLK CONTROL /Arcturus uC5282Microcontroller Modulewith 10/100 Ethernet
ET
HE
RN
ET
Control Control
RF OUTPUTTo SSSB
TRIGGERMonitor TTL
EXTERNALTRIGGER120Hz60nS NIM
2856MHz Ref
MONITORPORTS
AD8099 Diff Amp
SSSBTrigTTL17 to 30uS
Thermocouples
CLOCK119MHz
RF BOARD
t
MATCHINGFILTERNETWORK
TemperatureMonitor t
DC PowerSupplies
DC PowerSupplyMonitors
Control BoardADCs
TemperatureMonitor

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Additional Slides
The following two pages show an overview of the LLRF control modules. From these diagrams, counts of module types, as well as function and location are seen.

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Eth recvr
EVR
VME Crate at S20 running
longitudinal, beam-based
feedback.
CPU
PAC
Gun
PADPADPAD
SPAC
RF Dist’n
Laser
PAC
L0-B
PADPAD
PAC
L1-S
PADPAD
PACL0-Tcav
PADPAD
PACL0-A
PADPAD
SPAC
PAD
PAD PAC
Beam Phase Monitor
PAD
SPACSPACSPAC
SPACPAD
Fast PACs: Slow PACs (SPACs): PADs: VME crates:
RF phase and amplitude correction and global feedback at 120 Hz for LCLS LINAC S20
PAC
L1-X
PADPADPAD
PAD
PAC
Key:
Indicates may be needed
86191
S20
The maybe is included in counts below
Indicates located in RF HutOtherwise at Klystron
Overview of LLRF at Sector 20

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Overview of LLRF at Sector 24
Fast PACs: Slow PACs (SPACs): PADs: VME crates:
Eth recvr
EVR
CPU
PAC
L24-1
PACL24-2
PACL24-3
PACTcav L24-8
SPAC
S29
SPAC
S30
PADPAD
VME Crate at S24 running
longitudinal, beam-based
feedback.
4221
S24
RF phase and amplitude correction and global feedback at 120 Hz for LCLS LINAC S20

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Beam Phase MonitorR. Akre
A. Haase
B. Hong
D. Kotturi
V. Pacak
H. Schwarz
Preliminary Design Review
November 30, 2005

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Outline
•Purpose
•Specifications
•System outline
•Cavity
•Noise Levels
•Analysis
•Long Term Drifts
•Summary

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Laser Timing Stabilization Feedback
Beam timing information from the beam phase monitor will be used to apply corrections to the timing of the laser on the RF Gun.
PHAS AMPL
TOROID
BUNCH CHARGE
BEAM PHASE CAVITY
GUN RF FEEDBACK
InputsGUN-CELL1-PHAS/AMPLGUN-CELL2-PHAS/AMPL
ActuatorsGUN RF ACTUATORS
2856MHz R ef
GUN RF ACTUATORS
LCLS RF Oscilla tor
LINAC MDL Ref.
GUN RF REF.
LASER RF R EF.
PHAS
PHASEERROR
ActuatorL0, L1 to L2, L3Phase
LASER POWERACTUATOR
OUT
GUN-CELL2
GUN-CELL1
KLYSTRONAMPLIFIER / SLC CONTROL
LASER OSC
Reference
LASER PHASE & AMPLITUDE?
LASER AMPLIFIER
LASER OSC. PHASE
WATER TEMP
RF GUN
LASER PHASE ACTUATOR
LASER OSCILLATOR PHASEFEEDBACK
InputsBEAM PHASE CAVITY
ActuatorsLASER PHASE ACTUATOR
PHASE ERROR BetweenL0, L1 and L 2, L3
AMPL
LASER OSCILLATOR PHASEand LASER POWERFEEDBACK
InputsLASER OSC. PHASEBUNCH CHARGEGUN-CELL1-AMPL/PHASGUN-CELL2-AMPL/PHASLASER PHASE & AMPLITUDEGUN RF ACTUATORSBEAM PHASE CAVITY
ActuatorsLASER POWERLASER PHASE ACTUATOR
GUN TUNE FEEDBACK
InputsGUN-FOR-PHASGUN-CELL1-PHASGUN-CELL2-PHAS
ActuatorsWATER TEMP
GUN-FOR
2856MHzRF REF.
LASER
GUN
L0A
L0B
L0-TCAV1
L1-X
L1-S

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Specifications
Short term (2 second) timing jitter: 100fS rms
Long term (4 day) timing jitter: ±1pS
Range of the above accuracies is ±10pS
Data available at 120Hz

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
System Outline

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Cavity
Frequency = 2856MHz
Q = 6000
Time Constant = 700nS
Temperature Coefficient = 50kH/°C

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
System Critical Noise Levels and Bandwidths
Cavity Signal – Bandwidth 500kHz
Local Oscillator – Noise Floor –143dBc/Hz
IF Filter – Bandwidth 4MHz
ADC – SNR at input 76dB

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
System Critical Noise Levels and Bandwidths
2830.5MHz Oscillator
1
Beam Phase Cavity
Attenuator
Monitor Port
Coupler
MIXER
LO
RF
IF
Monitor Port
In TunnelAmp
Filter - Butterworth3rd order BandPass2.5.5MHz Center4.0MHz BW2dB IL at 25.5MHz
30dBm pk
ADC LTC22082.25Vpp FSTransformer coupled102MHz Clock
30dBm pk
Attenuator
3dBm pk23dBm pk
2Vpp 10dBm pk
13dBm
-3dBm pk 17dBm pk
-130dBm/Hz-143dBc/Hz
-174dBm/Hz-174dBm/Hz
-129dBm/Hz-143dBc/Hz
-146dBm/Hz-143dBc/Hz Within filters BW
-135dBm/Hz-143dBc/HzBeyond 5MHz from CF<-155dBm/Hz<-163dBc/HzIntegrated Noise-77dBc
Generated from 119MHz OscillatorExpected SSB Phase Noise LevelsOffset Hz dBc/Hz @ 2830.5MHz10 -82100 -961k -12410k -14420k -146
ADC SNR 77dBFS

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
ADC Linear Technologies LTC2208
16Bit 130MHz
SNR 77.6dBFS 30MHz in Clock 130MHz SFDR 95dB

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
AnalysisPhas
e
Calculated Beam Phase at Beam Time
Measured Data Point 1
Measured Data Point 2
Time

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
I & Q from WaveformDigital Down Mixing and Normalization
0 10 20 30 40 50 600.6
0.4
0.2
0
0.2
0.4
0.6
0.8
125.5MHz Digitized Signal
Point Number
Fra
ctio
n A
DC
Ful
l Sca
le
.
Digitized
Input Signal

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Optimization
Optimal Points to use for analysis is 16 point average at points 18 and 120

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Analysis Results
Standard deviation of result = 1.1e-4 or 6.3fS rms jitter
Signal level 20dB lower will give 63fS rms jitter
Sensitivity to frequency change = 0.6fS/2.8kH freq change
Sensitivity to timing change over +-10deg = 1:1

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
80ft (1M deg) of ½ inch superflex has TC of 4ppm/degCWater temp tolerance is +-0.1degF = +-400fS drift
Long Term Drifts

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Summary
Short term (2 second) timing jitter: 100fS rms
63fS rms
Long term (4 day) timing jitter: ±1pS
±0.8pS
Range of the above accuracies is ±10pS
Results
Data available at 120Hz
Simple algorithm in integer arithmetic will allow this

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Feedback Page 1
LOCAL FEEDBACK
LOCAL FEEDBACK

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Feedback Page 2
LOCAL FEEDBACK
GLOBAL FEEDBACK

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Feedback Page 3LOCAL FEEDBACK
LOCAL FEEDBACK
GLOBAL FEEDBACK

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Feedback Page 4GLOBAL FEEDBACK

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Feedback Page 5GLOBAL FEEDBACK

Ron Akre, Dayle Kotturi
LCLS LLRF [email protected], [email protected]
April 20, 2006
Feedback Page 6