Embed Size (px)
Citation preview
Procesamiento digital de la senalDiseno de filtros IIR
Alfonso ZozayaUniversidad de Carabobo (UC)
Departamento de Electronica y Comunicaciones
Valencia, Venezuela, abril de 2004
A. Zozaya Abr. 2004 –1–
Introduccion
((While it is easy to calculate the filter’s frequency response, given thefilter coefficients, the inverse problem (calculating the filter coefficientsfrom the desired frequency response) is so far an insoluble problem.Not many text books admit this.))
[1]
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Abr. 2004 –2–
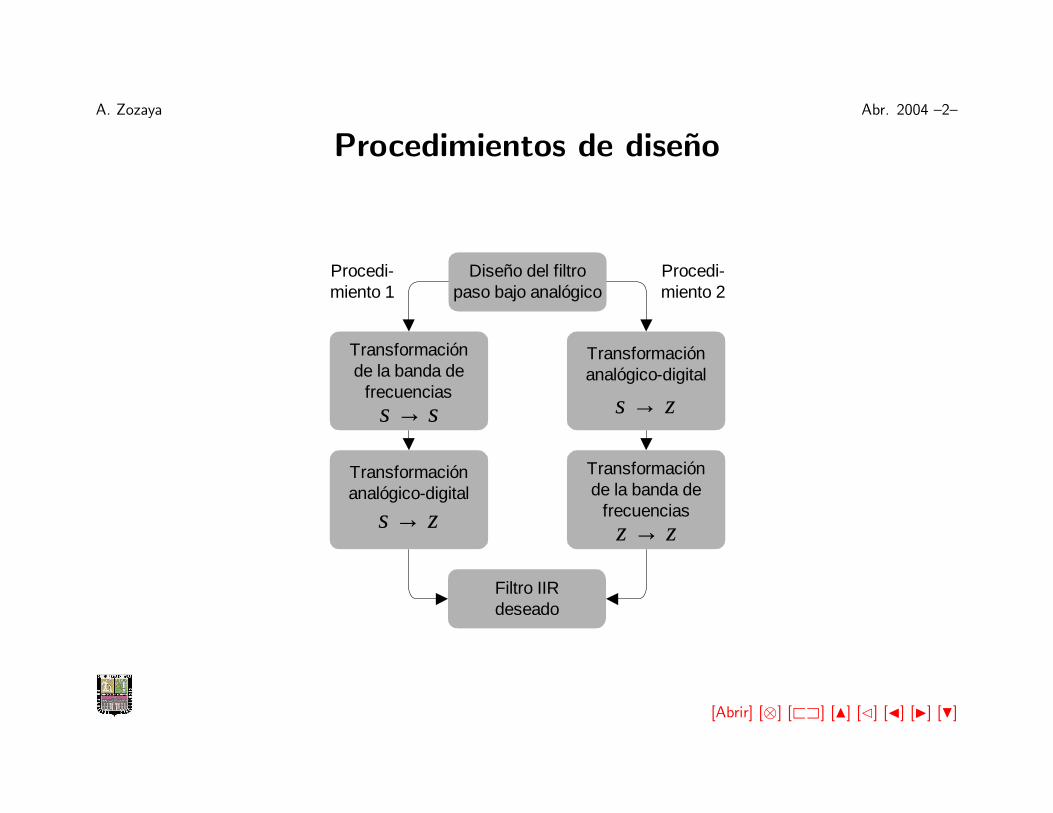
Procedimientos de diseno
s s→
Transformaciónde la banda de
frecuencias
Transformaciónanalógico-digital
s z→
Diseño del filtropaso bajo analógico
Filtro IIRdeseado
Transformaciónde la banda de
frecuencias
Transformaciónanalógico-digital
z z→
s z→
Procedi-miento 1
Procedi-miento 2
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Abr. 2004 –3–
Premisas de diseno
1. Respuesta de magnitud cuadratica.
2. Especificaciones relativas
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Abr. 2004 –4–
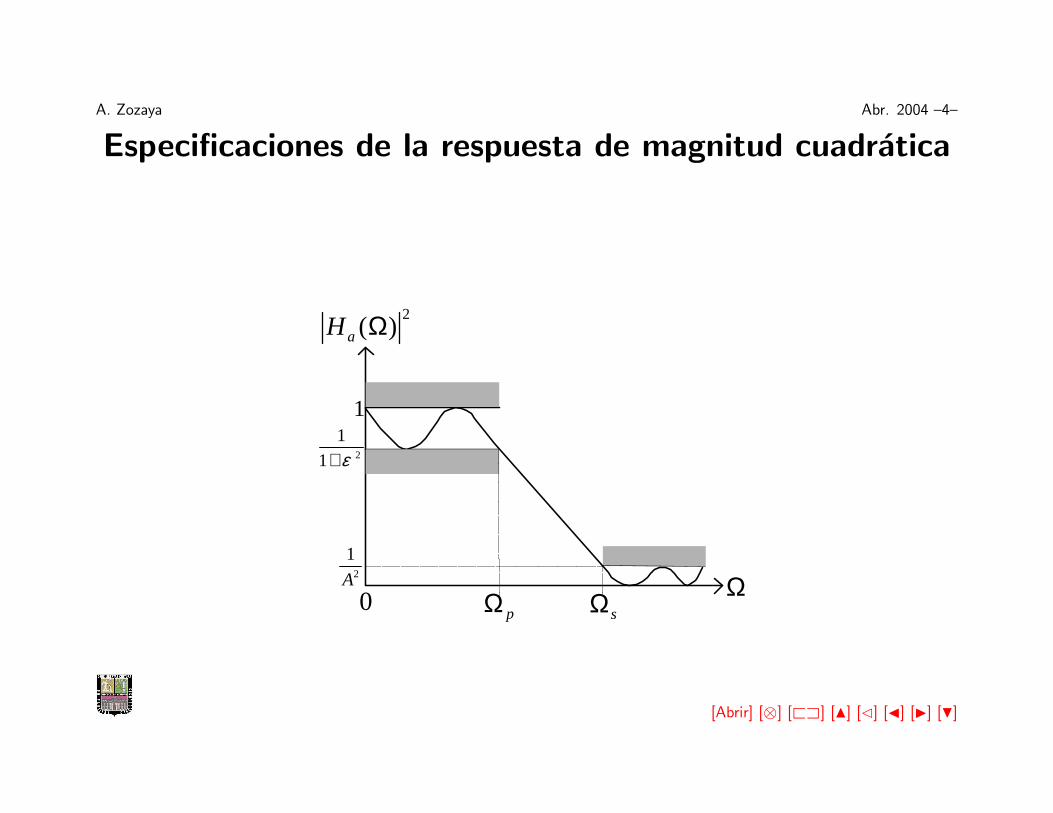
Especificaciones de la respuesta de magnitud cuadratica
1
2
1
1 ε+
pΩ sΩ Ω2
1
A0
2( )aH Ω
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Abr. 2004 –5–
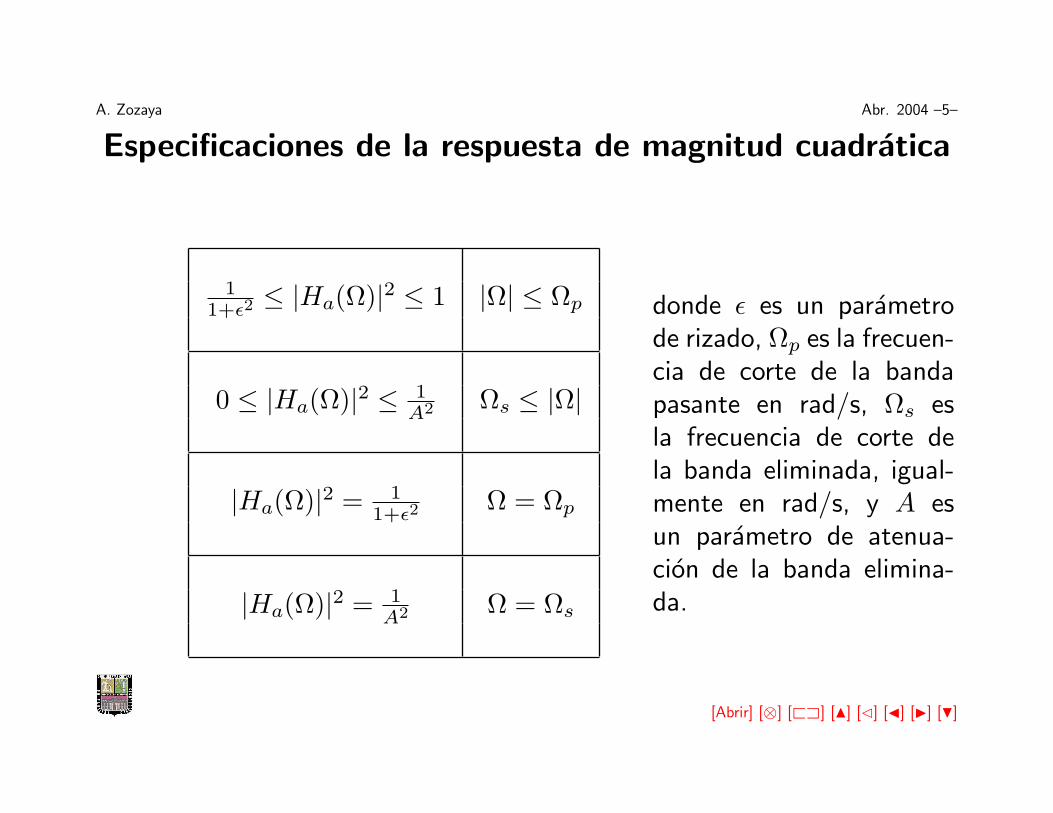
Especificaciones de la respuesta de magnitud cuadratica
11+ε2
≤ |Ha(Ω)|2 ≤ 1 |Ω| ≤ Ωp
0 ≤ |Ha(Ω)|2 ≤ 1A2 Ωs ≤ |Ω|
|Ha(Ω)|2 = 11+ε2
Ω = Ωp
|Ha(Ω)|2 = 1A2 Ω = Ωs
donde ε es un parametrode rizado, Ωp es la frecuen-cia de corte de la bandapasante en rad/s, Ωs esla frecuencia de corte dela banda eliminada, igual-mente en rad/s, y A esun parametro de atenua-cion de la banda elimina-da.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Abr. 2004 –6–
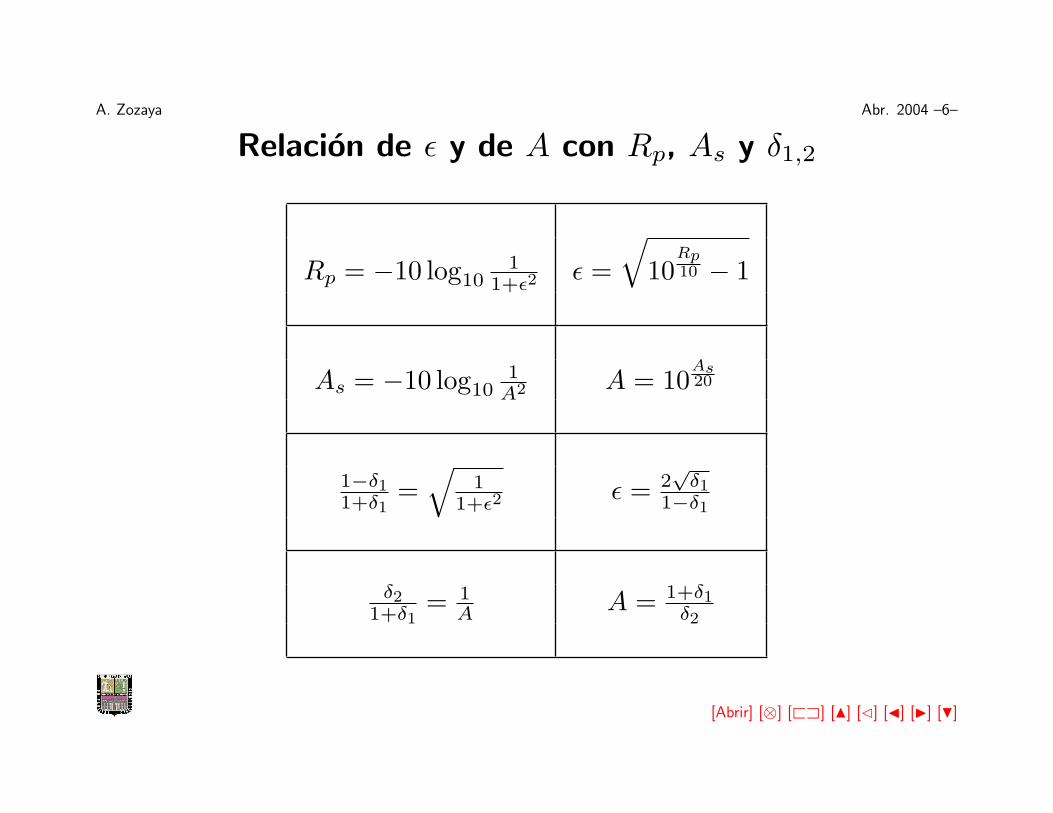
Relacion de ε y de A con Rp, As y δ1,2
Rp = −10 log101
1+ε2ε =
√10
Rp10 − 1
As = −10 log101
A2 A = 10As20
1−δ11+δ1
=√
11+ε2
ε = 2√
δ11−δ1
δ21+δ1
= 1A A = 1+δ1
δ2
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Abr. 2004 –7–
Caracterısticas de los prototipos de filtros analogicos
1. Filtros paso bajo de Butterworth.
2. Filtros paso bajo de Chebyshev.
3. Filtros paso bajo Elıpticos.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Abr. 2004 –8–
Caracterısticas de los filtros paso bajo de Butterworth
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Ωc/Ω
|Ha(Ω
)|2
N=10
N=1
N=2
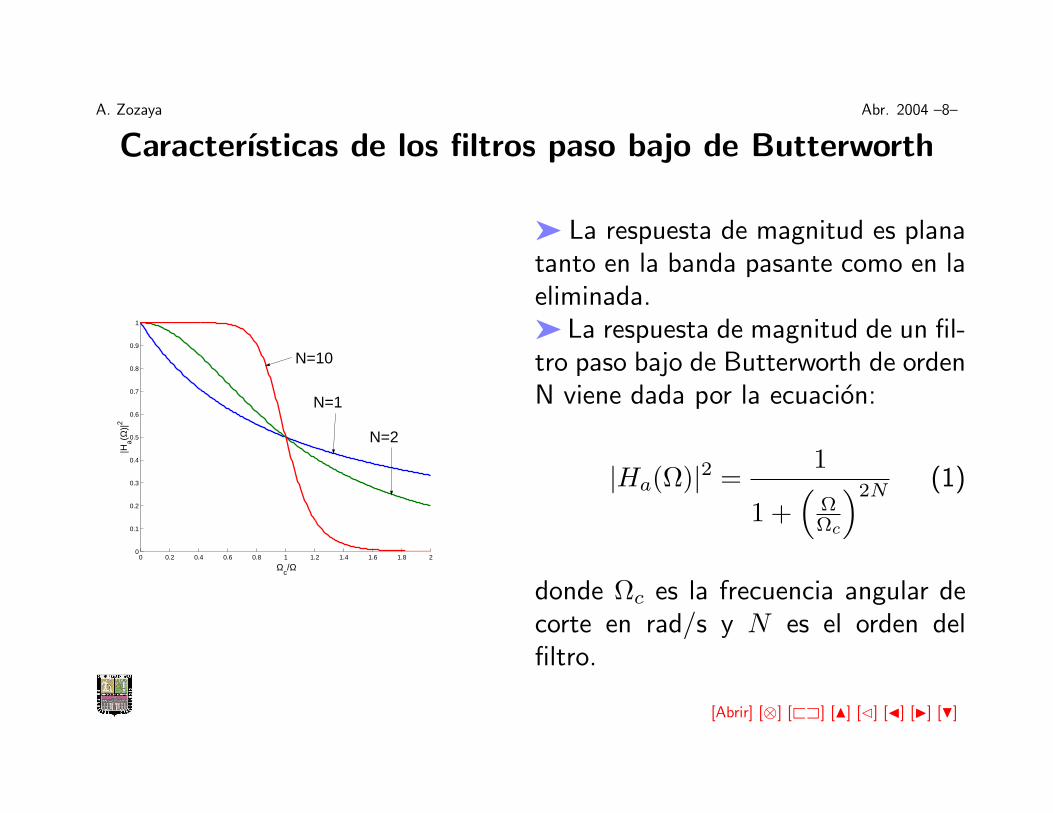
La respuesta de magnitud es planatanto en la banda pasante como en laeliminada. La respuesta de magnitud de un fil-tro paso bajo de Butterworth de ordenN viene dada por la ecuacion:
|Ha(Ω)|2 =1
1 +(
ΩΩc
)2N(1)
donde Ωc es la frecuencia angular decorte en rad/s y N es el orden delfiltro.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya FPB de Chebyshev –9–
Caracterısticas de los filtros paso bajo de Chebyshev
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Ωc/Ω
|Ha(Ω
)|2
Chebyshev−I
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Ωc/Ω
|Ha(Ω
)|2
Chebyshev−II
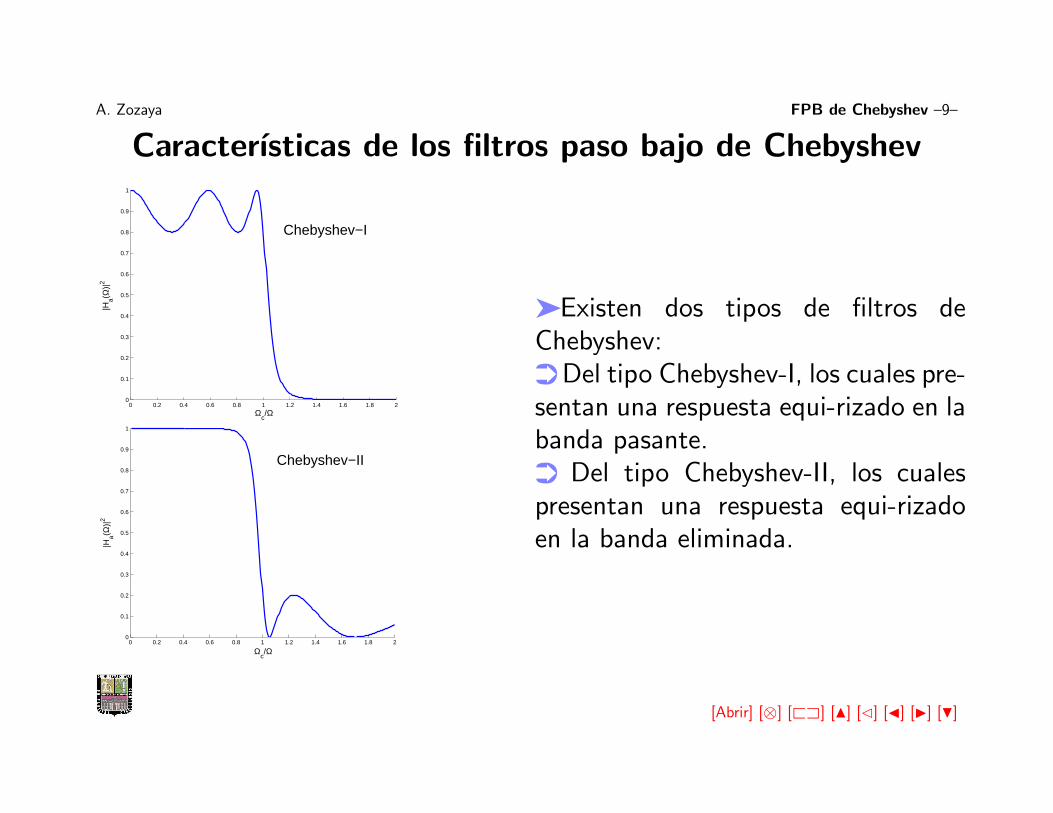
Existen dos tipos de filtros deChebyshev: Del tipo Chebyshev-I, los cuales pre-sentan una respuesta equi-rizado en labanda pasante. Del tipo Chebyshev-II, los cualespresentan una respuesta equi-rizadoen la banda eliminada.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya FPB de Chebyshev –10–
Respuesta de magnitud de los filtros paso bajo deChebyshev-I
La respuesta de magnitud de un filtro paso bajo de Chebyshev-I de ordenN viene dada por la ecuacion:
|Ha(Ω)|2 =1
1 + ε2T 2N
(ΩΩc
) (2)
con:
TN(x) =
cos[N cos−1(x)
], 0 ≤ x ≤ 1;
cosh[N cosh−1(x)
], 1 < x < ∞.
donde Ωc es la frecuencia angular de corte en rad/s, N es el orden del filtro,ε es el factor de rizado de la banda pasante relacionado con Rp, y TN(x) esel polinomio de Chebyshev de orden N .
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya FPB de Chebyshev –11–
Respuesta de magnitud de los filtros paso bajo deChebyshev-II
La respuesta de magnitud de un filtro paso bajo de Chebyshev-II de ordenN viene dada por la ecuacion:
|Ha(Ω)|2 =1
1 +[ε2T 2
N
(ΩcΩ
)]−1 (3)
donde Ωc es la frecuencia angular de corte en rad/s, N es el orden del filtroy ε es el factor de rizado de la banda eliminada relacionado con Rp.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya FPB Elıpticos –12–
Caracterısticas de los filtros paso bajo Elıpticos
Los filtros elıpticos exhiben equi-rizado tanto en la banda pasante comoen la banda eliminada. Satisfacen, en general, los requerimientos de diseno con el menor ordenN en comparacion con todos los demas tipos de filtro. Dados N , Rp, Rs en dB, los filtros elıpticos minimizan la banda detransicion. La respuesta de magnitud de un filtro paso bajo elıptico de orden N vienedada por la ecuacion:
|Ha(Ω)|2 =1
1 + ε2U2N
(ΩΩc
) (4)
donde Ωc es la frecuencia angular de corte en rad/s, N es el orden del filtro,
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya FPB Elıpticos –13–
ε es el factor de rizado de la banda pasante relacionado con Rp, y UN(x)es la denominada funcion elıptica de Jacobi de orden N .
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya FPB usando MATLAB –14–
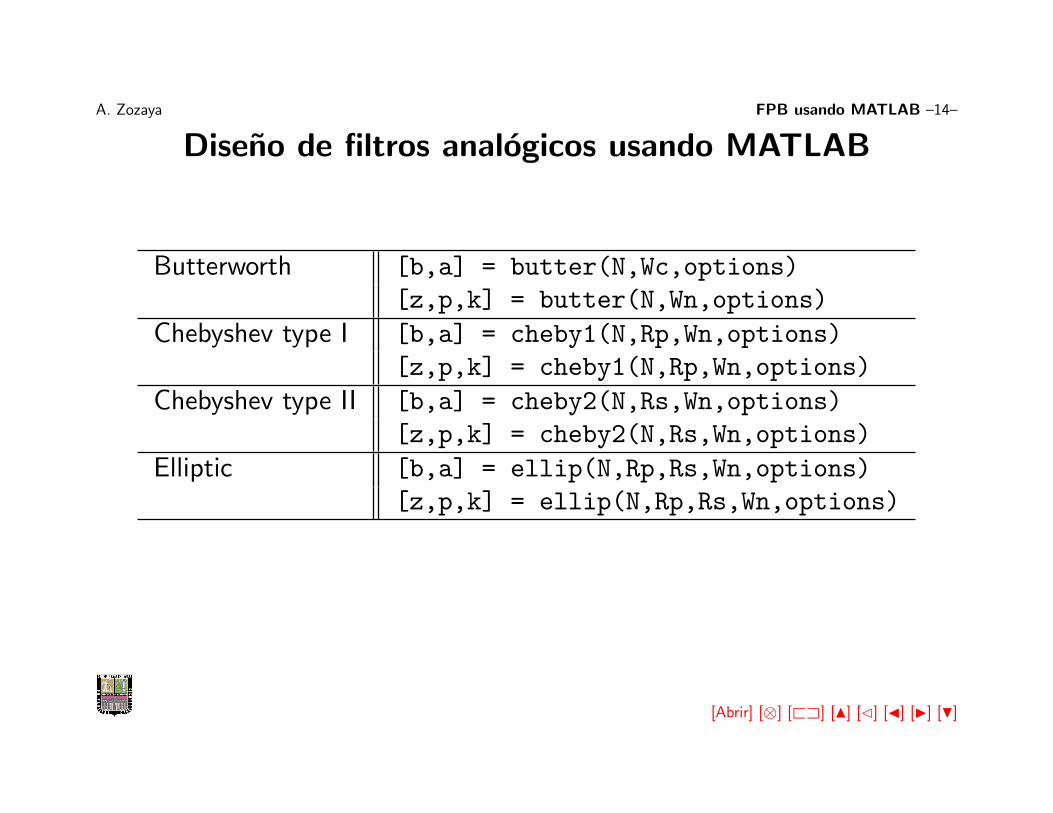
Diseno de filtros analogicos usando MATLAB
Butterworth [b,a] = butter(N,Wc,options)[z,p,k] = butter(N,Wn,options)
Chebyshev type I [b,a] = cheby1(N,Rp,Wn,options)[z,p,k] = cheby1(N,Rp,Wn,options)
Chebyshev type II [b,a] = cheby2(N,Rs,Wn,options)[z,p,k] = cheby2(N,Rs,Wn,options)
Elliptic [b,a] = ellip(N,Rp,Rs,Wn,options)[z,p,k] = ellip(N,Rp,Rs,Wn,options)
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya FPB usando MATLAB –15–
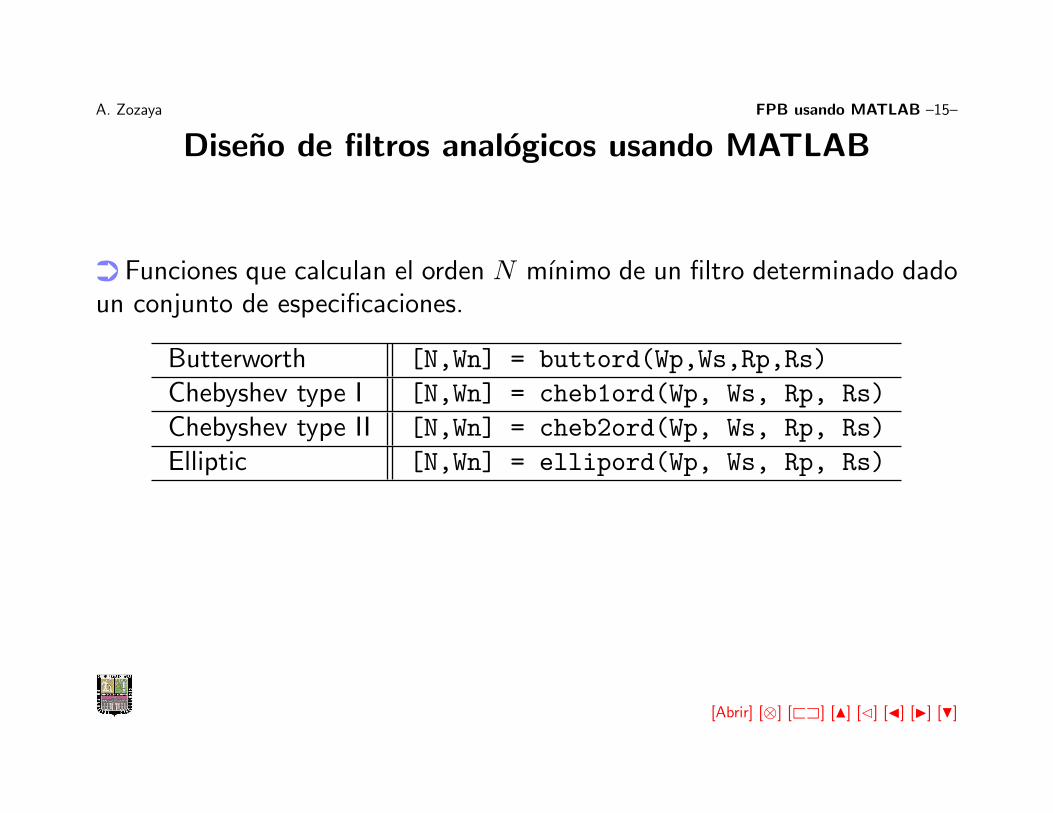
Diseno de filtros analogicos usando MATLAB
Funciones que calculan el orden N mınimo de un filtro determinado dadoun conjunto de especificaciones.
Butterworth [N,Wn] = buttord(Wp,Ws,Rp,Rs)Chebyshev type I [N,Wn] = cheb1ord(Wp, Ws, Rp, Rs)Chebyshev type II [N,Wn] = cheb2ord(Wp, Ws, Rp, Rs)Elliptic [N,Wn] = ellipord(Wp, Ws, Rp, Rs)
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –16–
Transformaciones analogico-digital
Un fltro digital se disena a partir de un filtro analogico procurandoconservar alguna caracterıstica deseada de este, mediante alguna ecuacionde transformacion s → z.
Las transformaciones mas usadas, con prevalencia de la segunda de lasmencionadas, son:
Transformacion invariante de la respuesta impulsiva, en la quese procura conservar la forma de la respuesta impulsiva del filtro.
Transformacion bilineal, en la que se procura preservar la forma defuncion del sistema.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –17–
Transformacion invariante de la respuesta impulsiva
Receta de diseno segun [1]:
Especificar una respuesta de magnitud deseada Hd(Ω): Ωp, Ωs, Rp y As.
Disenar el filtro analogico correspondiente Ha(Ω).
Calcular la respuesta impulsiva del filtro analogico: ha(t) = F−1[Ha(Ω)].
Tomar suficientes muestras de esta respuesta impulsiva h(n) = ha(nT )hasta ((capturar)) su forma.
Usar el resultado –h(n)– como los coeficientes de filtro digital.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –18–
Transformacion invariante de la respuesta impulsiva
Aunque el procedimiento de diseno sugerido esta planteado en el dominiotemporal, las frecuencias digital, ω, y analogica, Ω, se relacionan mediantela formula:
ω = ΩT (5)
o, equivalentemente:eω = eΩT (6)
De la ecuacion (6), y tomando en cuenta que z = eω en el cırculounitario del plano z, y s = Ω en el eje imaginario del plano s, se deduce lasiguiente ecuacion de transformacion entre los planos s y z:
z = esT (7)
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –19–
Transformacion invariante de la respuesta impulsiva
En virtud de las ecuaciones (5) y (7) se obtienen las versiones solapadasH(ω) y H(z) de Ha(Ω) y Ha(s), respectivamente, siguientes:
H(ω) =1T
∞∑k=−∞
Ha
(Ω− 2π
T k)
H(z) =1T
∞∑k=−∞
Ha
(s− 2π
T k)
mapeo eje img→ cırculo unitario mapeo s → z
En virtud de las relaciones de mapeo establecidas anteriormente sepuede establecer el procedimiento de diseno que se presenta en la siguientediapositiva.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –20–
Transformacion invariante de la respuesta impulsiva
Receta de diseno segun [2]:
Especificar una respuesta de magnitud deseada H(ω) del filtro digitalpaso bajo: ωp, ωs, Rp y As.
Escoger un intervalo de muestreo apropiado T y determinar las frecuenciasanalogicas: Ωp = ωp
T y Ωs = ωsT .
Disenar el correspondiente filtro paso bajo analogico a partir de: Ωp, Ωs,Rp y As (usando, por ejemplo, las funciones butter, cheby1, cheby2 oellip de MATLAB) .
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –21–
Transformacion invariante de la respuesta impulsiva
Expandir Ha(s) en una suma de fracciones parciales:
Ha(s) =N∑
k=1
Rk
s− pk
Transformar los polos analogicos en polos digitales –usando la ecuacion(7)– para obtener el filtro digital:
H(z) =N∑
k=1
Rk
1− epkTz−1
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –22–
Transformacion invariante de la respuesta impulsiva
El metodo de diseno de filtros digitales mediante la transformacioninvariante de la respuesta impulsiva adolece de solapamiento.
Este solapamiento se convierte en un problema cuando la respuesta demagnitud del filtro analogico posee componentes importantes de frecuenciamas alla de la frecuencia de muestreo.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –23–
Transformacion bilineal
z Las propiedades de un filtro analogico se preservan muy bien mediantela denominada transformacion bilineal [3]:
s = c1− z−1
1 + z1z−1
1− sc
1 + sc
donde c es una constante arbitraria positiva que se debe fijar apropiadamentepara mapear en modo preciso una determinada frecuencia analogica en unadeterminada frecuencia digital. En los filtros paso bajo c es escogido parahacer corresponder el mismo valor de frecuencia de corte en ambos dominios.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –24–
Transformacion bilineal
z Tomando en cuenta que:
z =reω
s =σ + Ω
resulta [4]:
σ =cr2 − 1
1 + r2 + 2r cos ω
Ω =c2r sinω
1 + r2 + 2r cos ω
(8)
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –25–
Transformacion bilineal
De las ecuaciones (8) se desprende:F El semiplano izquierdo del plano complejo s se mapea en la region
interior al circulo unitario del plano complejo z, en consecuencia, la estabi-lidad del filtro analogico es traspasada al filtro digital.
F El semiplano derecho del plano complejo s se mapea en la regionexterior al circulo unitario del plano complejo z.
F Los puntos del eje imaginario −∞ < Ω < ∞ del plano complejo sse mapean conformemente en una relacion uno a uno con los puntos delcirculo unitario del plano complejo z.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –26–
Transformacion bilineal
F La relacion entre las frecuencias analogica y digital se desprende dela segunda ecuacion (8) poniendo r = 1 [4, 3]:
Ω = c tanω
2(9)
F Durante el diseno se suele imponer que las frecuencias de corteanalogica y digital coincidan ΩcT = ωc, de donde se despeja el valor de c[3]: c = Ωc cot ωc
2 .
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones A/D –27–
Transformacion bilineal
z La transformacion bilineal permite la conservacion de la respuesta demagnitud del filtro analogico en la banda pasante (si es apropiadamenteutilizada).
z El que en la transformacion bilineal todo el eje imaginario del planocomplejo s sea mapeado en el circulo unitario del plano complejo z,implica una gran compresion en frecuencia denominada en ingles frequencywarping.
z Uno de los efectos de la compresion en frecuencia se refleja en laalteracion de la forma de las bandas de transicion.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones de bandas –28–
Transformacion de bandas frecuenciales
1. Transformacion paso bajo-paso bajo
2. Transformacion paso bajo-paso alto
3. Transformacion paso bajo-paso banda
4. Transformacion paso bajo-banda eliminada
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones de bandas –29–
Transformacion paso bajo-paso bajo
z−1 → z−1 − a
1− az−1
donde
a =sin[(ωp − ω′p)/2]sin[(ωp + ω′p)/2]
siendo ω′p la nueva frecuencia lımite de la banda pasante.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones de bandas –30–
Transformacion paso bajo-paso alto
z−1 → z−1 + a
1 + az−1
donde
a = −cos[(ωp + ω′p)/2]cos[(ωp − ω′p)/2]
siendo ω′p la nueva frecuencia lımite de la banda pasante.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]

A. Zozaya Trasformaciones de bandas –31–
Transformacion paso bajo-paso banda
z−1 → − z−2 − a1z−1 + a2
a2z−2 − a1z−1 + 1
donde a1 = −2αK/(K + 1), a2 = (K − 1)/(K + 1), α = cos[(ωu+ωl)/2]cos[(ωu−ωl)/2],
K = cot ωu−ωl2 tan ωp
2 , siendo ωu y ωl las frecuencias lımites superior einferior, respectivamente, de la banda pasante.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Trasformaciones de bandas –32–
Transformacion paso bajo-banda eliminada
z−1 → − z−2 − a1z−1 + a2
a2z−2 − a1z−1 + 1
donde a1 = −2αK/(K + 1), a2 = (1 − K)/(K + 1), α = cos[(ωu+ωl)/2]cos[(ωu−ωl)/2],
K = cot ωu−ωl2 tan ωp
2 , siendo ωu y ωl las frecuencias lımites superior einferior, respectivamente, de la banda eliminada.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Bibliografıa –33–
Referencias
[1] BORES Signal Processing. Introduction to DSP: IIR Filters.http://www.bores.com/index.htm, Mar 18, 2004.
[2] Vinay K. Ingle and John G. Proakis. Digital Signal Processing using MA-TLAB. BookWare Companion Series. Brooks/Cole Thomson Learning,2000.
[3] Julius O. Smith. Introduction to Digital Filters. http://www-ccrma.stanford.edu/˜jos/filters/, February 11, 2002.
[4] Jhon G. Proakis and Dimitris G. Manolakis. Digital Signal Processing,
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]
A. Zozaya Bibliografıa –34–
Principles,Algorithms, and Application. Prentice Hall, third edition,1996.
[5] Gordon E. Carlson. Signal and Linear System Analysis with MATLAB.BookWare Companion Series. John Wiley & Sons, Inc., 1998.
[6] Thanos Antoulas and John Slavinsky. Partial Fraction Expansion.http://cnx.rice.edu/content/, Nov 24, 2003.
[Abrir] [⊗] [<=] [N] [C] [J] [I] [H]



























![TH Minerals Filtro Prensa[2]](https://img.pdfslide.us/doc/110x75/5695d2fd1a28ab9b029c729d/th-minerals-filtro-prensa2.jpg)