Embed Size (px)
Citation preview

Research ArticleNonlinear Dynamics Response of a Planar Mechanism withTwo Driving Links and Prismatic Pair Clearance
LijuanWu12 Dan B Marghitu1 and Jing Zhao1
1Department of Mechanical Engineering Auburn University 1418 Wiggins Hall Auburn AL 36849-5341 USA2Department of Mechanical Engineering Shanghai Dianji University Shanghai China
Correspondence should be addressed to Dan B Marghitu marghituauburnedu
Received 16 April 2017 Revised 16 June 2017 Accepted 20 June 2017 Published 8 August 2017
Academic Editor Mohammed Nouari
Copyright copy 2017 Lijuan Wu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The influence of the joint clearance on the dynamic response of a planar mechanism with two driving links and prismatic pairclearance is investigated under variable input speeds of the systemThe simulation model was built with a nonlinear impact modelThe normal contact force is characterized by Hertz contact theory and an energy dissipation term A tangential friction forceis involved in the simulation model based on Coulombrsquos friction law The simulation results indicate that the largest Lyapunovexponents are dependent on the clearance size and the input speed
1 Introduction
Clearance joints are found in all real mechanical systemsinstead of ideal joints which ignore the existence of toleranceand wear on joint elements However it has been concludedthat the stability and precision of systemmotion are consider-ably degraded as a result of the impact between the elementsof the clearance joint Moreover under certain conditionsthis imperfect system tends to exhibit chaotic nonlinearbehavior rather than periodicity The complexity and impor-tance of the clearance joints have attracted investigationfor centuries Dubowsky and Freudenstein [1] analyzed thedynamic responses of clearance joint based on an elasticmodel and pointed out that the characteristic is unstablevibrant and nonlinear Erkaya and Uzmay [2] measuredout the obvious higher vibration and noise of motion ona mechanism with clearance than that without clearanceat an experimental test rig Flores et al [3] performed theexperiment and the theory to obtain coincident results thatthe maximum impact acceleration increases significantlywhen the mechanism with clearance operates at high speedand the important effect of clearance on dynamic perfor-mance must be considered Houfek et al [4ndash6] studied thenonlinear performance of mechanisms with clearance undervarious conditions and parameters chaotic phenomenonwaspresented in their works
A number of valuable works have focused on themethod-ology for modeling and simulation of mechanical systemswith clearance joints as well as prediction and quantificationof the dynamic response based on the system parameters ofclearance size system inputs material and surface proper-ties Crank-slider and four-bar mechanisms with clearanceare the typical mechanisms of these studies [7ndash10] Thedifferent methods for building a dynamic model to introduceclearance into general mechanism equations from the previ-ous studies have both its advantages anddisadvantages whichwill be discussed later Furthermore the simulation resultsshow that the nonlinear response related to the parametersof the system Thus the work of modeling the dynamicmodel correctly and figuring out the relationships betweenthe response andparameters of a systemwith clearance is verycritical and still in progress In addition most of dynamicresponse studies were focused on the mechanisms which hasconstant system inputs and single driving link However inpractical applications more complex basic mechanism is of agreater value than a simple one
In general there exist three modes of the relative motionof clearance joint elements the contact mode the free flightmode and the impactmode which are all considered bymostclearance models According to different assumptions on theimpact process (continuous or instantaneous) there are twomain approaches to formulating the dynamic equations of
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 4295805 12 pageshttpsdoiorg10115520174295805
2 Mathematical Problems in Engineering
motion of mechanism with clearance namely continuousand discontinuous we will discuss them separately
The first approach regards the impact as a short butcontinuous process accompanied bymaterial deformation onthe contact point A linear or nonlinear continuous contactforce is usually used to describe this process For building thedynamic model of a system with clearance in free fly modea group basic kinematic and dynamic equation of motionis implemented just as in an ideal system When impact-contact occurs a contact force is added simultaneously in thebasic equations of motion as an internal formThe numericalintegration algorithm continues in thewhole solution processof equations In this approach the contact force plays a crucialrole in reflecting the impact behavior as precisely as possibleThus themain focus is to build a forcemodelwhich takes intoaccount the material velocity and deformation of collisionbodies This approach was studied by many researchers [1112]
Timoshenko and Gere suggested a linear force modelwhich considered the linear elastic deformation on the con-tact surface and energy consumption in the collision process[13]
Hertz built a nonlinear force model but neglected theenergy dissipation [14] Hunt and Crossley introduced adamping term to represent the energy loss based on Hertzrsquoscontact law [15]
Lankarani and Nikravesh (L-N) further expressed thehysteresis damping as the function of the coefficient of resti-tution and the velocity before the impact [16] The L-N forcemodel considered both nonlinear deformation and energyloss due to impact and was widely used in later research
Ravn used the continuous approach and the L-N forcemodel to describe a mechanism with a rotational jointclearance Performing this simulation has shown that all thekinematic and dynamic characteristics of the mechanism atdifferent motion modes could be displayed as a continuousformThe chaotic behavior of the deep impactmechanics alsocould be analyzed further Experimental data was presentedlater to verify the continuous analysis method [17]
Flores and Ambrosio compared several continuous forcemodels from elastic deformation and energy dissipationaspects The motion trajectories of the clearance joint ele-ments and the relationship between the force and defor-mation indicated the L-N model led to a much smootherdynamic response of the system than other models [18]
However Schwab et al pointed out the hysteresis damp-ing in the L-N force model is effective only for highcoefficients of restitution [19] Over the last years a goodnumber of works [20ndash23] have performed studies to modifythe hysteresis damping for both large and small coefficientsof restitution Modeling a contact force is still the mostimportant work for this approach
The second discontinuous approach assumes the impactoccurs instantaneously and the system configuration does notsignificantly change during the short time contact When theimpact is detected the system equation integration pausesMeanwhile the approach uses the momentum balance andthe coefficient of restitution to calculate the velocity imme-diately after the impact as the initial condition when the
integration is restarted This approach was first proposedby Kane [24] Marghitu and Hurmuzlu [25] and Schwab etal [19] who used this approach for modeling the impactmode equations for a basicmechanical systemThis approachclosely imitates the actual motion of clearance joint elementsbut the information about the variation of contact forcesand accelerations during impact is not yet available in openliterature
From the aspect of dynamic response the influenceresulted from the crucial factors of clearance size input speedrigidity and flexibility of bodies lubrication and friction injoint which have been investigated previously to accuratelypredict the dynamic response of the mechanical system withclearance [26ndash28] Periodic and chaotic performances wereanalyzed with factors on the typical mechanism of crank-slider and four-bar mechanisms Nonlinear methods such asphase space [7] center trajectory [29] Poincare map [30]Lyapunov exponent [26] and bifurcation diagram [31] areused to study linear and nonlinear behavior
Seneviratne and Earles [32] studied the periodic andchaotic performance of a four-bar mechanism throughchanging the crank speed and the realistic damping of linkThe result shows that the transformation from regular tochaotic motion depends on a critical value of the input speedslightly over the value the clearance response characterizedby nonperiodicity and sensitive to initial conditions Theydeduced that the regular and chaotic motion correspond tocontact maintained and contact lost (impact occurs) respec-tively The damping did not affect the response significantly
Farahanchi and Shaw [33] studied the influence of clear-ance size joint friction crank speed and impact parameterson the response of a crank-slider mechanism with slideclearanceThe chaoticmotion is prevalent for the high speedsof the crank and low joint friction The periodic motion isobserved for low values of the crank speed and coefficientof restitution For a given set of parameter values initialcondition and time scale affected the appearance of theresponse They also pointed out that slight changes in theparameters render the periodic motion to chaotic
Flores [34] selected the parameters of the clearancesize input crank speed and number of clearance joints asthe factors to find the influence on the dynamic responseof a crank-slider mechanism Poincare maps and journalcenter trajectories show that the magnifications of forces andmoments are affected by the revolute clearance joints anddepend on the clearance size and input crank speed Thenonlinear response is also sensitive to these parameters
Azimi Olyaei and Ghazavi [35] used Poincare section andfractal dimension of strange attractor of the system responseto analyze the influence of constant velocity and certainclearance in a crank-slider mechanism It was shown thatthe system response substantially changes when the jointclearance was introduced System exhibits chaotic behaviorunder specific conditions
Muvengei et al [36] studied the effects of clearancesize and input crank speed on the dynamic response ofa typical plane crank-slider mechanism with two revoluteclearance joints From the phase portraits of the slider velocityand acceleration it could be concluded that the chaotic or
Mathematical Problems in Engineering 3
y
x
B
12
4
4
3
3
3
1 2
A
A
A
D
C
c
c
G
E
Figure 1 Mechanism with two driving links and clearance for the prismatic pair
periodic dynamic response not only depends on the clearancesize and the operating speed but also relates to the location ofclearance joints Therefore multiple clearance revolute jointsshould be considered when analyzing the dynamic behaviorof a mechanism system
Tang et al [37] studied the response that resulted fromthe constant crank speed and the different clearance sizeIt was proved from Poincare map that the phenomenaof chaotic periodic and subharmonic response could befound in the special conditions And a slight variance inclearance led to a quite different appearance in PoincaremapWith clearance varying gradually the periodic responsesubharmonic response and bifurcation phenomena can beobserved clearly
In the present work we will study the nonlinear dynamicresponses of a rigid planar mechanism with two driving linksand prismatic pair clearance A series of clearance sizes and agroup of input speeds constant and variable are individuallyset as the different operating conditionsThe adopted contactand friction force model are presented firstThen the stabilityand accuracy of the mechanism motion are quantified bycomparing the dynamic responses deduced from differentconditions Finally the methods of phase plane Poincaresection and Lyapunov exponents are applied to analyze theeffect of those parameters on periodic and chaotic behaviorsNumerical simulation has been done in ADAMS using aspecific input force
2 Modeling of the Mechanism
In this section a planar model of mechanism with clearanceis built as an example to investigate the influence of clearanceand input speed on the dynamic behavior Contact conditionposition and force are deduced and illustrated based on theclearance joint model presented Figure 1 shows the planarmechanism which consists of five rigid bodies four idealrevolute pairs and a prismatic pair with clearance belongingto the double cranks slider mechanism widely used in themachinery such as slotting machine and compressor Thedegrees of freedom of the mechanism become four from twowhen the clearance is set The coordinate origin is set atpoint119860 the gravitational acceleration is taken as acting in thenegative119884 direction and themechanismmotion is defined ina119883119884 planeThe initial angles are 120572 = 110 deg and120573 = 60 degTwo rotation speeds are considered inputs on link 1 and link2 respectively to drive the mechanism At the prismatic paira clearance 119888 is introduced by the difference of slider boreand link 3 in the diameter directionThe characteristics of thebodies are given in Table 1
21 Modeling of the Clearance In a clearance prismatic pairthere are four possible states of the relative motion which areillustrated in Figure 2 (a) no contact (b) impact-contact ona single point on the end face of slider (c) impact-contacton two points on the opposing sides (d) impact-contact on
4 Mathematical Problems in Engineering
Table 1 Basic characteristics of bodies
Bodies Length (mm) Mass (kg) Moment of inertia (kgsdotm2)Link 1 250 0392 000817Link 2 320 0502 001713Link 3 900 1412 007703Slider 4 60 0211 000003
M
P
N
Q
(a)
P
N
(b)
P
N
(c)
P
Q
(d)
O z
yT
P
e
n
t
2r
2(r + c)
O1
O2
FN
FT
(e)
Figure 2 Four possible states of the relative motion
two points on the same side To display the contact in statesclearly the impact-contact point is taken and the section viewis enlarged for all the four states Figure 2(e) is the sectionalview taken at any contact point in Figures 2(b) 2(c) and2(d) which is magnified to describe the contact states The
clearance 119888 is defined as the difference of the two diametersthe diameter of link 3 2119903 and the slider 2(119903 + 119888) The contactprocess is considered as a continuous compression processand a gradual restitution process In compression process asmall elastic deformation namely penetration 120575 occurs at
Mathematical Problems in Engineering 5
the contacting point as shown in the figure The penetration120575 expression is
120575 = 119890 minus 119888
119890 = radic(1198742119909 minus 1198741119909)2 + (1198742119910 minus 1198741119910)2(1)
where1198741 and1198742 are the center positions of the slider and link3 respectively which can be calculated from the kinematicequations in the generalized coordinates 119890 is the eccentricdistance The value of 120575 is used to detect the motion modebetween the two bodies When 120575 lt 0 the mode is free flyotherwise 120575 ge 0whichmeans impact or contact occurs thenthe contact and the deformation point can be calculated by
1198791119909 = 1198741119909 + 2 (119903 + 119888) cos (120579) 1198791119910 = 1198741119910 + 2 (119903 + 119888) sin (120579) 1198792119909 = 1198791119909 + 120575 cos (120579) 1198792119910 = 1198791119910 + 120575 sin (120579)
cos (120579) = 1198742119909 minus 1198741119909119890
(2)
where 1198791 is the initial contacting point on the slider surface1198792 is the maximum deformation point
22 Modeling of the Contact Force The impact-contact dura-tion in addition to material deformation is accompaniedby energy dissipation It can be characterized by two itemsin a normal contact force At the same time the tangentialrelative sliding and viscous phenomenon at contacting pointshould also be considered through a friction force As shownin Figure 2(e) when 120575 ge 0 the forces 119865119899 and 119865119905 are applied atthe contact point to replace the slide constraint between thetwo bodies When 120575 lt 0 the force and the slider constraintmove away and extra two degrees of freedom are introducedUnder ADAMS the normal contact force is described by theimpact function based on a typical nonlinear spring-dampermodel which is composed of two items the nonlinear pureelastic deformation force expressed by Hertz contact law andthe damping force expressed by hysteretic damping itemThenormal contact force is given by (3) and can be calculated bythe ADAMS function library
119865119873 = 119870120575119899 + 119863 120575 120575 gt 00 120575 le 0 (3)
where 119870 is the stiffness coefficient 120575 is the relative penetra-tion 119899 is the exponent set to 15 for the mental body and 119863is the hysteretic damping coefficientThe parameter119870 related
to thematerial and geometric properties of the contact bodiescan be expressed as
119870 = 4311986411987705
119864minus1 = 1 minus V211198641 + 1 minus V22
1198642 1119877 = 1
1198771 +11198772
(4)
where 119877 V and 119864 are the radii Poissonrsquos ratio and Youngrsquosmodulus for contact bodies respectively
The damping force is related to relative penetration veloc-ity and damping coefficient119863 which was widely expressed asa product of a hysteresis damping factor and an exponentialitem of penetration The damping factor is defined as afunction of the contact stiffness initial contact velocityand coefficient of restitution Over the last decades severalformulations for the damping factor have been proposedwhich was compared in detail by Alves et al [38] In presentwork the damping factor is expressed in maximum dampingcoefficient form and the damping coefficient 119863 is expressedas a step function to avoid discontinuity of damping force
119863 = STEP (120575 0 0 119889max 119862max)
=
0 120575 le 0119862max ( 120575
119889max)2
(3 minus 2 120575119889max
) 0 lt 120575 lt 119889max
119862max 120575 ge 119889max
(5)
where 119889max is the maximum penetration which determineswhen the damping force reaches maximum 119862max is themaximum damping coefficient related to the material whichrepresents the loss of energy resulting from collisions Whenthe penetration is less than the maximum the damping coef-ficient is a cubic function of the penetration and 119862max Thedamping force increases with the increase in the penetrationWhen the penetration reaches 119889max the damping coefficientraises to the maximum 119862max and the damping force reachesmaximum A recommended value for 119889max is 01mm and119862max is one percent of the stiffness coefficient of the material
The tangential friction force at contact point follows themodified Coulombrsquos friction law given by
119865119879 = minus120583119865119873 V1198791003816100381610038161003816V1198791003816100381610038161003816
120583 =
120583119889 1003816100381610038161003816V1198791003816100381610038161003816 ge ]119889
STEP (1003816100381610038161003816V1198791003816100381610038161003816 V119889 120583119889 V119904 120583119904) ]119904 lt 1003816100381610038161003816V1198791003816100381610038161003816 lt ]119889
120583119904 1003816100381610038161003816V1198791003816100381610038161003816 le ]119904
(6)
where 120583119889 is the coefficient of dynamic friction 120583119904 is thecoefficient of static friction V119879 is the relative tangentialvelocity of the contact point ]119889 and ]119904 are the absolutevelocity thresholds for the transition from dynamic frictionto static friction
6 Mathematical Problems in Engineering
Table 2 Simulation parameters
Simulation parameters119870 10 times 105 Nmm119863 58Nsdotsmm120583119889 01120583119904 03119864 207GPa] 029Step size 01 sSimulation time 120 s
3 Results and Discussion
In this section we study the effect of initial conditions onthe dynamic responses of the planar mechanism with twodriving links and prismatic pair clearance Three cases areconsidered a series of clearance sizes a group of constantdrive speeds and a variable drive speed The simulationmodel presented in Figure 1 is completed for the threecases and basic conditions listed in Table 2 The numericalsolution is performed on ADAMSSolver In fact becauseof the frequent transition between the different states thecontact instant detection is another important task exceptthe solution of the dynamic equation for numerical issuein impact-contact events If the contact instant and pointare not detected precisely the penetration and the contactforce may become abnormally large and eventually resultin the termination of the integration process For accuracyand efficiency variable time step integral algorithms arewidely utilized to gradually narrow the scope of the detectionaccording to the calculation of the distance between thecontacting bodies Other measures like small time stepshort simulation time simple model and so forth are alsoeffective for finding the contact instant exactly In the presentwork the default stiff integrator GSTIFF and the defaultintegrator formulation I3 were selected for better compu-tational efficiency and good results The corrector controlsthe integration tolerance of 0001 and the simulation is set to10 periods of link 1 revolution In order to avoid the contactdetection failure due to the influence of the large amount ofintermediate data that occurred during the long time simu-lation a larger step size was selected to run all simulationscontinuous
Implementing the numerical simulation the perfor-mances of velocity and position of the mass center of link3 are presented to exhibit the dynamic responses of themechanism at different initial conditions Furthermore FFTphase plane Poincare section and largest Lyapunov exponentare calculated based on the simulation data to predict thesystemrsquos nonlinear behaviors in three cases FFT (fast Fouriertransform) converts a time domain signal of infinite durationinto a continuous spectrum composed of an infinite numberof sinusoids It can be used to analyze the motion of systemin the frequency domain In general periodic signals givepeaks at a fundamental and its harmonics quasi periodic
signals give peaks at linear combinations of two or moreirrationally related frequencies and chaotic dynamics givebroad band components to the spectrum [39] Phase planedescribes the relationship between the trajectories evolutionand the various state parameters in which each possiblestate corresponds to one unique point (attractor) Periodicmotion corresponds to closed trajectories and chaos motioncorresponds to a group of random separated points of thenever closed trajectories (strange attractor) in a certain region[40] Poincare sections are mathematical abstractions whichare often useful in highlighting the behavior of systems interms of periodic quasi-periodic and chaotic or nonlinearmotion A Poincare section consists of plotting the value oftwo components derivative of the state vector versus the vec-tor itself that is 119910(119905) and 1199101015840(119905) [41] The Lyapunov exponentsprovide a measure of the sensitivity of the system to its initialconditions They describe an average rate of divergence orconvergence of two neighboring trajectories in phase spacethus providing an indication of the sensitivity of a dynamicsystem to small local perturbations and distinguishing thechaotic and nonchaotic behaviors of the system [42 43]We use the Lyapunov exponents for quantitative analysis ofnonlinear behaviors
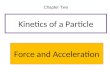
31 Influence of the Clearance Size In this section thedynamic behaviors of the mechanism with a series of clear-ance sizes are mainly exhibited and discussed The clearanceseries is set as 01 02 03 04 05 and 075mm The inputrotation speeds on link 1 and link 2 are 1205961 = 30 ds and 1205962 =50 ds respectively Figure 3 exhibits the velocity responses oflink 3 mass center119866 It is concluded that the velocity of link 3is influenced by the existence of the clearance The frequencyand the amplitude of fluctuation increase as the clearance sizeincreases This means the impact-contact is more serious inthe larger clearance joint Figure 4 shows the deviation of themass center position relative to the ideal position (clearance= 0) which increases with the clearance size The two figuresdemonstrate that the impact-contact between the sliderand link 3 affects the accuracy of link 3 motion increasesin the clearance and decreases in the precision of themotion
Figures 5(a) and 5(b) show the comparison of the FFTof center 119866 displacement data when the clearance is 0 and01mm respectively From Figure 5(b) it can be seen thatthe Fourier spectrum is a continuous broadband spectrumand has broader peaks as compared to Figure 5(a) whichindicates that the motion of the system is not periodic orquasi-periodic Figure 6 shows the phase plane of the velocityversus displacement of center 119866 the dynamic behavior isperiod with closed and smooth orbit in the ideal systemand tends to be chaotic with the existence of the clearanceFigure 7 shows the Poincare section which concludes thatone pointorbit on the section is consistent with periodbehavior of the system without clearance However thesystem with clearance exhibits the chaotic nature with thedense points filling up the section in fractal structure Itcan also be concluded that as the points increase they getmore dispersed with the increase in clearance which furtherindicates that the system is more unpredictable The chaotic
Mathematical Problems in Engineering 7
Clearance = 03 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 1 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 075 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Clearance = 05 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
3012 18 24 360 6Time (s)
Clearance = 0
0
300
600
900
1200
1500
1800Ve
loci
ty (m
ms
)
6 12 18 24 30 360Time (s)
Clearance = 01 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 02 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 04 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Figure 3 The velocity of mass center 119866 at different clearance sizes
Clearance = 03 mm Clearance = 1 mmClearance = 075 mmClearance = 05 mmClearance = 01 mm
Clearance = 02 mm
Clearance = 04 mm
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
r disp
lace
men
t (m
m)
0 24 3612Time (s)
Figure 4 The deviation of the mass center 119866 position relative to the ideal position
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
motion of mechanism with clearance namely continuousand discontinuous we will discuss them separately
The first approach regards the impact as a short butcontinuous process accompanied bymaterial deformation onthe contact point A linear or nonlinear continuous contactforce is usually used to describe this process For building thedynamic model of a system with clearance in free fly modea group basic kinematic and dynamic equation of motionis implemented just as in an ideal system When impact-contact occurs a contact force is added simultaneously in thebasic equations of motion as an internal formThe numericalintegration algorithm continues in thewhole solution processof equations In this approach the contact force plays a crucialrole in reflecting the impact behavior as precisely as possibleThus themain focus is to build a forcemodelwhich takes intoaccount the material velocity and deformation of collisionbodies This approach was studied by many researchers [1112]
Timoshenko and Gere suggested a linear force modelwhich considered the linear elastic deformation on the con-tact surface and energy consumption in the collision process[13]
Hertz built a nonlinear force model but neglected theenergy dissipation [14] Hunt and Crossley introduced adamping term to represent the energy loss based on Hertzrsquoscontact law [15]
Lankarani and Nikravesh (L-N) further expressed thehysteresis damping as the function of the coefficient of resti-tution and the velocity before the impact [16] The L-N forcemodel considered both nonlinear deformation and energyloss due to impact and was widely used in later research
Ravn used the continuous approach and the L-N forcemodel to describe a mechanism with a rotational jointclearance Performing this simulation has shown that all thekinematic and dynamic characteristics of the mechanism atdifferent motion modes could be displayed as a continuousformThe chaotic behavior of the deep impactmechanics alsocould be analyzed further Experimental data was presentedlater to verify the continuous analysis method [17]
Flores and Ambrosio compared several continuous forcemodels from elastic deformation and energy dissipationaspects The motion trajectories of the clearance joint ele-ments and the relationship between the force and defor-mation indicated the L-N model led to a much smootherdynamic response of the system than other models [18]
However Schwab et al pointed out the hysteresis damp-ing in the L-N force model is effective only for highcoefficients of restitution [19] Over the last years a goodnumber of works [20ndash23] have performed studies to modifythe hysteresis damping for both large and small coefficientsof restitution Modeling a contact force is still the mostimportant work for this approach
The second discontinuous approach assumes the impactoccurs instantaneously and the system configuration does notsignificantly change during the short time contact When theimpact is detected the system equation integration pausesMeanwhile the approach uses the momentum balance andthe coefficient of restitution to calculate the velocity imme-diately after the impact as the initial condition when the
integration is restarted This approach was first proposedby Kane [24] Marghitu and Hurmuzlu [25] and Schwab etal [19] who used this approach for modeling the impactmode equations for a basicmechanical systemThis approachclosely imitates the actual motion of clearance joint elementsbut the information about the variation of contact forcesand accelerations during impact is not yet available in openliterature
From the aspect of dynamic response the influenceresulted from the crucial factors of clearance size input speedrigidity and flexibility of bodies lubrication and friction injoint which have been investigated previously to accuratelypredict the dynamic response of the mechanical system withclearance [26ndash28] Periodic and chaotic performances wereanalyzed with factors on the typical mechanism of crank-slider and four-bar mechanisms Nonlinear methods such asphase space [7] center trajectory [29] Poincare map [30]Lyapunov exponent [26] and bifurcation diagram [31] areused to study linear and nonlinear behavior
Seneviratne and Earles [32] studied the periodic andchaotic performance of a four-bar mechanism throughchanging the crank speed and the realistic damping of linkThe result shows that the transformation from regular tochaotic motion depends on a critical value of the input speedslightly over the value the clearance response characterizedby nonperiodicity and sensitive to initial conditions Theydeduced that the regular and chaotic motion correspond tocontact maintained and contact lost (impact occurs) respec-tively The damping did not affect the response significantly
Farahanchi and Shaw [33] studied the influence of clear-ance size joint friction crank speed and impact parameterson the response of a crank-slider mechanism with slideclearanceThe chaoticmotion is prevalent for the high speedsof the crank and low joint friction The periodic motion isobserved for low values of the crank speed and coefficientof restitution For a given set of parameter values initialcondition and time scale affected the appearance of theresponse They also pointed out that slight changes in theparameters render the periodic motion to chaotic
Flores [34] selected the parameters of the clearancesize input crank speed and number of clearance joints asthe factors to find the influence on the dynamic responseof a crank-slider mechanism Poincare maps and journalcenter trajectories show that the magnifications of forces andmoments are affected by the revolute clearance joints anddepend on the clearance size and input crank speed Thenonlinear response is also sensitive to these parameters
Azimi Olyaei and Ghazavi [35] used Poincare section andfractal dimension of strange attractor of the system responseto analyze the influence of constant velocity and certainclearance in a crank-slider mechanism It was shown thatthe system response substantially changes when the jointclearance was introduced System exhibits chaotic behaviorunder specific conditions
Muvengei et al [36] studied the effects of clearancesize and input crank speed on the dynamic response ofa typical plane crank-slider mechanism with two revoluteclearance joints From the phase portraits of the slider velocityand acceleration it could be concluded that the chaotic or
Mathematical Problems in Engineering 3
y
x
B
12
4
4
3
3
3
1 2
A
A
A
D
C
c
c
G
E
Figure 1 Mechanism with two driving links and clearance for the prismatic pair
periodic dynamic response not only depends on the clearancesize and the operating speed but also relates to the location ofclearance joints Therefore multiple clearance revolute jointsshould be considered when analyzing the dynamic behaviorof a mechanism system
Tang et al [37] studied the response that resulted fromthe constant crank speed and the different clearance sizeIt was proved from Poincare map that the phenomenaof chaotic periodic and subharmonic response could befound in the special conditions And a slight variance inclearance led to a quite different appearance in PoincaremapWith clearance varying gradually the periodic responsesubharmonic response and bifurcation phenomena can beobserved clearly
In the present work we will study the nonlinear dynamicresponses of a rigid planar mechanism with two driving linksand prismatic pair clearance A series of clearance sizes and agroup of input speeds constant and variable are individuallyset as the different operating conditionsThe adopted contactand friction force model are presented firstThen the stabilityand accuracy of the mechanism motion are quantified bycomparing the dynamic responses deduced from differentconditions Finally the methods of phase plane Poincaresection and Lyapunov exponents are applied to analyze theeffect of those parameters on periodic and chaotic behaviorsNumerical simulation has been done in ADAMS using aspecific input force
2 Modeling of the Mechanism
In this section a planar model of mechanism with clearanceis built as an example to investigate the influence of clearanceand input speed on the dynamic behavior Contact conditionposition and force are deduced and illustrated based on theclearance joint model presented Figure 1 shows the planarmechanism which consists of five rigid bodies four idealrevolute pairs and a prismatic pair with clearance belongingto the double cranks slider mechanism widely used in themachinery such as slotting machine and compressor Thedegrees of freedom of the mechanism become four from twowhen the clearance is set The coordinate origin is set atpoint119860 the gravitational acceleration is taken as acting in thenegative119884 direction and themechanismmotion is defined ina119883119884 planeThe initial angles are 120572 = 110 deg and120573 = 60 degTwo rotation speeds are considered inputs on link 1 and link2 respectively to drive the mechanism At the prismatic paira clearance 119888 is introduced by the difference of slider boreand link 3 in the diameter directionThe characteristics of thebodies are given in Table 1
21 Modeling of the Clearance In a clearance prismatic pairthere are four possible states of the relative motion which areillustrated in Figure 2 (a) no contact (b) impact-contact ona single point on the end face of slider (c) impact-contacton two points on the opposing sides (d) impact-contact on
4 Mathematical Problems in Engineering
Table 1 Basic characteristics of bodies
Bodies Length (mm) Mass (kg) Moment of inertia (kgsdotm2)Link 1 250 0392 000817Link 2 320 0502 001713Link 3 900 1412 007703Slider 4 60 0211 000003
M
P
N
Q
(a)
P
N
(b)
P
N
(c)
P
Q
(d)
O z
yT
P
e
n
t
2r
2(r + c)
O1
O2
FN
FT
(e)
Figure 2 Four possible states of the relative motion
two points on the same side To display the contact in statesclearly the impact-contact point is taken and the section viewis enlarged for all the four states Figure 2(e) is the sectionalview taken at any contact point in Figures 2(b) 2(c) and2(d) which is magnified to describe the contact states The
clearance 119888 is defined as the difference of the two diametersthe diameter of link 3 2119903 and the slider 2(119903 + 119888) The contactprocess is considered as a continuous compression processand a gradual restitution process In compression process asmall elastic deformation namely penetration 120575 occurs at
Mathematical Problems in Engineering 5
the contacting point as shown in the figure The penetration120575 expression is
120575 = 119890 minus 119888
119890 = radic(1198742119909 minus 1198741119909)2 + (1198742119910 minus 1198741119910)2(1)
where1198741 and1198742 are the center positions of the slider and link3 respectively which can be calculated from the kinematicequations in the generalized coordinates 119890 is the eccentricdistance The value of 120575 is used to detect the motion modebetween the two bodies When 120575 lt 0 the mode is free flyotherwise 120575 ge 0whichmeans impact or contact occurs thenthe contact and the deformation point can be calculated by
1198791119909 = 1198741119909 + 2 (119903 + 119888) cos (120579) 1198791119910 = 1198741119910 + 2 (119903 + 119888) sin (120579) 1198792119909 = 1198791119909 + 120575 cos (120579) 1198792119910 = 1198791119910 + 120575 sin (120579)
cos (120579) = 1198742119909 minus 1198741119909119890
(2)
where 1198791 is the initial contacting point on the slider surface1198792 is the maximum deformation point
22 Modeling of the Contact Force The impact-contact dura-tion in addition to material deformation is accompaniedby energy dissipation It can be characterized by two itemsin a normal contact force At the same time the tangentialrelative sliding and viscous phenomenon at contacting pointshould also be considered through a friction force As shownin Figure 2(e) when 120575 ge 0 the forces 119865119899 and 119865119905 are applied atthe contact point to replace the slide constraint between thetwo bodies When 120575 lt 0 the force and the slider constraintmove away and extra two degrees of freedom are introducedUnder ADAMS the normal contact force is described by theimpact function based on a typical nonlinear spring-dampermodel which is composed of two items the nonlinear pureelastic deformation force expressed by Hertz contact law andthe damping force expressed by hysteretic damping itemThenormal contact force is given by (3) and can be calculated bythe ADAMS function library
119865119873 = 119870120575119899 + 119863 120575 120575 gt 00 120575 le 0 (3)
where 119870 is the stiffness coefficient 120575 is the relative penetra-tion 119899 is the exponent set to 15 for the mental body and 119863is the hysteretic damping coefficientThe parameter119870 related
to thematerial and geometric properties of the contact bodiescan be expressed as
119870 = 4311986411987705
119864minus1 = 1 minus V211198641 + 1 minus V22
1198642 1119877 = 1
1198771 +11198772
(4)
where 119877 V and 119864 are the radii Poissonrsquos ratio and Youngrsquosmodulus for contact bodies respectively
The damping force is related to relative penetration veloc-ity and damping coefficient119863 which was widely expressed asa product of a hysteresis damping factor and an exponentialitem of penetration The damping factor is defined as afunction of the contact stiffness initial contact velocityand coefficient of restitution Over the last decades severalformulations for the damping factor have been proposedwhich was compared in detail by Alves et al [38] In presentwork the damping factor is expressed in maximum dampingcoefficient form and the damping coefficient 119863 is expressedas a step function to avoid discontinuity of damping force
119863 = STEP (120575 0 0 119889max 119862max)
=
0 120575 le 0119862max ( 120575
119889max)2
(3 minus 2 120575119889max
) 0 lt 120575 lt 119889max
119862max 120575 ge 119889max
(5)
where 119889max is the maximum penetration which determineswhen the damping force reaches maximum 119862max is themaximum damping coefficient related to the material whichrepresents the loss of energy resulting from collisions Whenthe penetration is less than the maximum the damping coef-ficient is a cubic function of the penetration and 119862max Thedamping force increases with the increase in the penetrationWhen the penetration reaches 119889max the damping coefficientraises to the maximum 119862max and the damping force reachesmaximum A recommended value for 119889max is 01mm and119862max is one percent of the stiffness coefficient of the material
The tangential friction force at contact point follows themodified Coulombrsquos friction law given by
119865119879 = minus120583119865119873 V1198791003816100381610038161003816V1198791003816100381610038161003816
120583 =
120583119889 1003816100381610038161003816V1198791003816100381610038161003816 ge ]119889
STEP (1003816100381610038161003816V1198791003816100381610038161003816 V119889 120583119889 V119904 120583119904) ]119904 lt 1003816100381610038161003816V1198791003816100381610038161003816 lt ]119889
120583119904 1003816100381610038161003816V1198791003816100381610038161003816 le ]119904
(6)
where 120583119889 is the coefficient of dynamic friction 120583119904 is thecoefficient of static friction V119879 is the relative tangentialvelocity of the contact point ]119889 and ]119904 are the absolutevelocity thresholds for the transition from dynamic frictionto static friction
6 Mathematical Problems in Engineering
Table 2 Simulation parameters
Simulation parameters119870 10 times 105 Nmm119863 58Nsdotsmm120583119889 01120583119904 03119864 207GPa] 029Step size 01 sSimulation time 120 s
3 Results and Discussion
In this section we study the effect of initial conditions onthe dynamic responses of the planar mechanism with twodriving links and prismatic pair clearance Three cases areconsidered a series of clearance sizes a group of constantdrive speeds and a variable drive speed The simulationmodel presented in Figure 1 is completed for the threecases and basic conditions listed in Table 2 The numericalsolution is performed on ADAMSSolver In fact becauseof the frequent transition between the different states thecontact instant detection is another important task exceptthe solution of the dynamic equation for numerical issuein impact-contact events If the contact instant and pointare not detected precisely the penetration and the contactforce may become abnormally large and eventually resultin the termination of the integration process For accuracyand efficiency variable time step integral algorithms arewidely utilized to gradually narrow the scope of the detectionaccording to the calculation of the distance between thecontacting bodies Other measures like small time stepshort simulation time simple model and so forth are alsoeffective for finding the contact instant exactly In the presentwork the default stiff integrator GSTIFF and the defaultintegrator formulation I3 were selected for better compu-tational efficiency and good results The corrector controlsthe integration tolerance of 0001 and the simulation is set to10 periods of link 1 revolution In order to avoid the contactdetection failure due to the influence of the large amount ofintermediate data that occurred during the long time simu-lation a larger step size was selected to run all simulationscontinuous
Implementing the numerical simulation the perfor-mances of velocity and position of the mass center of link3 are presented to exhibit the dynamic responses of themechanism at different initial conditions Furthermore FFTphase plane Poincare section and largest Lyapunov exponentare calculated based on the simulation data to predict thesystemrsquos nonlinear behaviors in three cases FFT (fast Fouriertransform) converts a time domain signal of infinite durationinto a continuous spectrum composed of an infinite numberof sinusoids It can be used to analyze the motion of systemin the frequency domain In general periodic signals givepeaks at a fundamental and its harmonics quasi periodic
signals give peaks at linear combinations of two or moreirrationally related frequencies and chaotic dynamics givebroad band components to the spectrum [39] Phase planedescribes the relationship between the trajectories evolutionand the various state parameters in which each possiblestate corresponds to one unique point (attractor) Periodicmotion corresponds to closed trajectories and chaos motioncorresponds to a group of random separated points of thenever closed trajectories (strange attractor) in a certain region[40] Poincare sections are mathematical abstractions whichare often useful in highlighting the behavior of systems interms of periodic quasi-periodic and chaotic or nonlinearmotion A Poincare section consists of plotting the value oftwo components derivative of the state vector versus the vec-tor itself that is 119910(119905) and 1199101015840(119905) [41] The Lyapunov exponentsprovide a measure of the sensitivity of the system to its initialconditions They describe an average rate of divergence orconvergence of two neighboring trajectories in phase spacethus providing an indication of the sensitivity of a dynamicsystem to small local perturbations and distinguishing thechaotic and nonchaotic behaviors of the system [42 43]We use the Lyapunov exponents for quantitative analysis ofnonlinear behaviors
31 Influence of the Clearance Size In this section thedynamic behaviors of the mechanism with a series of clear-ance sizes are mainly exhibited and discussed The clearanceseries is set as 01 02 03 04 05 and 075mm The inputrotation speeds on link 1 and link 2 are 1205961 = 30 ds and 1205962 =50 ds respectively Figure 3 exhibits the velocity responses oflink 3 mass center119866 It is concluded that the velocity of link 3is influenced by the existence of the clearance The frequencyand the amplitude of fluctuation increase as the clearance sizeincreases This means the impact-contact is more serious inthe larger clearance joint Figure 4 shows the deviation of themass center position relative to the ideal position (clearance= 0) which increases with the clearance size The two figuresdemonstrate that the impact-contact between the sliderand link 3 affects the accuracy of link 3 motion increasesin the clearance and decreases in the precision of themotion
Figures 5(a) and 5(b) show the comparison of the FFTof center 119866 displacement data when the clearance is 0 and01mm respectively From Figure 5(b) it can be seen thatthe Fourier spectrum is a continuous broadband spectrumand has broader peaks as compared to Figure 5(a) whichindicates that the motion of the system is not periodic orquasi-periodic Figure 6 shows the phase plane of the velocityversus displacement of center 119866 the dynamic behavior isperiod with closed and smooth orbit in the ideal systemand tends to be chaotic with the existence of the clearanceFigure 7 shows the Poincare section which concludes thatone pointorbit on the section is consistent with periodbehavior of the system without clearance However thesystem with clearance exhibits the chaotic nature with thedense points filling up the section in fractal structure Itcan also be concluded that as the points increase they getmore dispersed with the increase in clearance which furtherindicates that the system is more unpredictable The chaotic
Mathematical Problems in Engineering 7
Clearance = 03 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 1 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 075 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Clearance = 05 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
3012 18 24 360 6Time (s)
Clearance = 0
0
300
600
900
1200
1500
1800Ve
loci
ty (m
ms
)
6 12 18 24 30 360Time (s)
Clearance = 01 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 02 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 04 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Figure 3 The velocity of mass center 119866 at different clearance sizes
Clearance = 03 mm Clearance = 1 mmClearance = 075 mmClearance = 05 mmClearance = 01 mm
Clearance = 02 mm
Clearance = 04 mm
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
r disp
lace
men
t (m
m)
0 24 3612Time (s)
Figure 4 The deviation of the mass center 119866 position relative to the ideal position
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
y
x
B
12
4
4
3
3
3
1 2
A
A
A
D
C
c
c
G
E
Figure 1 Mechanism with two driving links and clearance for the prismatic pair
periodic dynamic response not only depends on the clearancesize and the operating speed but also relates to the location ofclearance joints Therefore multiple clearance revolute jointsshould be considered when analyzing the dynamic behaviorof a mechanism system
Tang et al [37] studied the response that resulted fromthe constant crank speed and the different clearance sizeIt was proved from Poincare map that the phenomenaof chaotic periodic and subharmonic response could befound in the special conditions And a slight variance inclearance led to a quite different appearance in PoincaremapWith clearance varying gradually the periodic responsesubharmonic response and bifurcation phenomena can beobserved clearly
In the present work we will study the nonlinear dynamicresponses of a rigid planar mechanism with two driving linksand prismatic pair clearance A series of clearance sizes and agroup of input speeds constant and variable are individuallyset as the different operating conditionsThe adopted contactand friction force model are presented firstThen the stabilityand accuracy of the mechanism motion are quantified bycomparing the dynamic responses deduced from differentconditions Finally the methods of phase plane Poincaresection and Lyapunov exponents are applied to analyze theeffect of those parameters on periodic and chaotic behaviorsNumerical simulation has been done in ADAMS using aspecific input force
2 Modeling of the Mechanism
In this section a planar model of mechanism with clearanceis built as an example to investigate the influence of clearanceand input speed on the dynamic behavior Contact conditionposition and force are deduced and illustrated based on theclearance joint model presented Figure 1 shows the planarmechanism which consists of five rigid bodies four idealrevolute pairs and a prismatic pair with clearance belongingto the double cranks slider mechanism widely used in themachinery such as slotting machine and compressor Thedegrees of freedom of the mechanism become four from twowhen the clearance is set The coordinate origin is set atpoint119860 the gravitational acceleration is taken as acting in thenegative119884 direction and themechanismmotion is defined ina119883119884 planeThe initial angles are 120572 = 110 deg and120573 = 60 degTwo rotation speeds are considered inputs on link 1 and link2 respectively to drive the mechanism At the prismatic paira clearance 119888 is introduced by the difference of slider boreand link 3 in the diameter directionThe characteristics of thebodies are given in Table 1
21 Modeling of the Clearance In a clearance prismatic pairthere are four possible states of the relative motion which areillustrated in Figure 2 (a) no contact (b) impact-contact ona single point on the end face of slider (c) impact-contacton two points on the opposing sides (d) impact-contact on
4 Mathematical Problems in Engineering
Table 1 Basic characteristics of bodies
Bodies Length (mm) Mass (kg) Moment of inertia (kgsdotm2)Link 1 250 0392 000817Link 2 320 0502 001713Link 3 900 1412 007703Slider 4 60 0211 000003
M
P
N
Q
(a)
P
N
(b)
P
N
(c)
P
Q
(d)
O z
yT
P
e
n
t
2r
2(r + c)
O1
O2
FN
FT
(e)
Figure 2 Four possible states of the relative motion
two points on the same side To display the contact in statesclearly the impact-contact point is taken and the section viewis enlarged for all the four states Figure 2(e) is the sectionalview taken at any contact point in Figures 2(b) 2(c) and2(d) which is magnified to describe the contact states The
clearance 119888 is defined as the difference of the two diametersthe diameter of link 3 2119903 and the slider 2(119903 + 119888) The contactprocess is considered as a continuous compression processand a gradual restitution process In compression process asmall elastic deformation namely penetration 120575 occurs at
Mathematical Problems in Engineering 5
the contacting point as shown in the figure The penetration120575 expression is
120575 = 119890 minus 119888
119890 = radic(1198742119909 minus 1198741119909)2 + (1198742119910 minus 1198741119910)2(1)
where1198741 and1198742 are the center positions of the slider and link3 respectively which can be calculated from the kinematicequations in the generalized coordinates 119890 is the eccentricdistance The value of 120575 is used to detect the motion modebetween the two bodies When 120575 lt 0 the mode is free flyotherwise 120575 ge 0whichmeans impact or contact occurs thenthe contact and the deformation point can be calculated by
1198791119909 = 1198741119909 + 2 (119903 + 119888) cos (120579) 1198791119910 = 1198741119910 + 2 (119903 + 119888) sin (120579) 1198792119909 = 1198791119909 + 120575 cos (120579) 1198792119910 = 1198791119910 + 120575 sin (120579)
cos (120579) = 1198742119909 minus 1198741119909119890
(2)
where 1198791 is the initial contacting point on the slider surface1198792 is the maximum deformation point
22 Modeling of the Contact Force The impact-contact dura-tion in addition to material deformation is accompaniedby energy dissipation It can be characterized by two itemsin a normal contact force At the same time the tangentialrelative sliding and viscous phenomenon at contacting pointshould also be considered through a friction force As shownin Figure 2(e) when 120575 ge 0 the forces 119865119899 and 119865119905 are applied atthe contact point to replace the slide constraint between thetwo bodies When 120575 lt 0 the force and the slider constraintmove away and extra two degrees of freedom are introducedUnder ADAMS the normal contact force is described by theimpact function based on a typical nonlinear spring-dampermodel which is composed of two items the nonlinear pureelastic deformation force expressed by Hertz contact law andthe damping force expressed by hysteretic damping itemThenormal contact force is given by (3) and can be calculated bythe ADAMS function library
119865119873 = 119870120575119899 + 119863 120575 120575 gt 00 120575 le 0 (3)
where 119870 is the stiffness coefficient 120575 is the relative penetra-tion 119899 is the exponent set to 15 for the mental body and 119863is the hysteretic damping coefficientThe parameter119870 related
to thematerial and geometric properties of the contact bodiescan be expressed as
119870 = 4311986411987705
119864minus1 = 1 minus V211198641 + 1 minus V22
1198642 1119877 = 1
1198771 +11198772
(4)
where 119877 V and 119864 are the radii Poissonrsquos ratio and Youngrsquosmodulus for contact bodies respectively
The damping force is related to relative penetration veloc-ity and damping coefficient119863 which was widely expressed asa product of a hysteresis damping factor and an exponentialitem of penetration The damping factor is defined as afunction of the contact stiffness initial contact velocityand coefficient of restitution Over the last decades severalformulations for the damping factor have been proposedwhich was compared in detail by Alves et al [38] In presentwork the damping factor is expressed in maximum dampingcoefficient form and the damping coefficient 119863 is expressedas a step function to avoid discontinuity of damping force
119863 = STEP (120575 0 0 119889max 119862max)
=
0 120575 le 0119862max ( 120575
119889max)2
(3 minus 2 120575119889max
) 0 lt 120575 lt 119889max
119862max 120575 ge 119889max
(5)
where 119889max is the maximum penetration which determineswhen the damping force reaches maximum 119862max is themaximum damping coefficient related to the material whichrepresents the loss of energy resulting from collisions Whenthe penetration is less than the maximum the damping coef-ficient is a cubic function of the penetration and 119862max Thedamping force increases with the increase in the penetrationWhen the penetration reaches 119889max the damping coefficientraises to the maximum 119862max and the damping force reachesmaximum A recommended value for 119889max is 01mm and119862max is one percent of the stiffness coefficient of the material
The tangential friction force at contact point follows themodified Coulombrsquos friction law given by
119865119879 = minus120583119865119873 V1198791003816100381610038161003816V1198791003816100381610038161003816
120583 =
120583119889 1003816100381610038161003816V1198791003816100381610038161003816 ge ]119889
STEP (1003816100381610038161003816V1198791003816100381610038161003816 V119889 120583119889 V119904 120583119904) ]119904 lt 1003816100381610038161003816V1198791003816100381610038161003816 lt ]119889
120583119904 1003816100381610038161003816V1198791003816100381610038161003816 le ]119904
(6)
where 120583119889 is the coefficient of dynamic friction 120583119904 is thecoefficient of static friction V119879 is the relative tangentialvelocity of the contact point ]119889 and ]119904 are the absolutevelocity thresholds for the transition from dynamic frictionto static friction
6 Mathematical Problems in Engineering
Table 2 Simulation parameters
Simulation parameters119870 10 times 105 Nmm119863 58Nsdotsmm120583119889 01120583119904 03119864 207GPa] 029Step size 01 sSimulation time 120 s
3 Results and Discussion
In this section we study the effect of initial conditions onthe dynamic responses of the planar mechanism with twodriving links and prismatic pair clearance Three cases areconsidered a series of clearance sizes a group of constantdrive speeds and a variable drive speed The simulationmodel presented in Figure 1 is completed for the threecases and basic conditions listed in Table 2 The numericalsolution is performed on ADAMSSolver In fact becauseof the frequent transition between the different states thecontact instant detection is another important task exceptthe solution of the dynamic equation for numerical issuein impact-contact events If the contact instant and pointare not detected precisely the penetration and the contactforce may become abnormally large and eventually resultin the termination of the integration process For accuracyand efficiency variable time step integral algorithms arewidely utilized to gradually narrow the scope of the detectionaccording to the calculation of the distance between thecontacting bodies Other measures like small time stepshort simulation time simple model and so forth are alsoeffective for finding the contact instant exactly In the presentwork the default stiff integrator GSTIFF and the defaultintegrator formulation I3 were selected for better compu-tational efficiency and good results The corrector controlsthe integration tolerance of 0001 and the simulation is set to10 periods of link 1 revolution In order to avoid the contactdetection failure due to the influence of the large amount ofintermediate data that occurred during the long time simu-lation a larger step size was selected to run all simulationscontinuous
Implementing the numerical simulation the perfor-mances of velocity and position of the mass center of link3 are presented to exhibit the dynamic responses of themechanism at different initial conditions Furthermore FFTphase plane Poincare section and largest Lyapunov exponentare calculated based on the simulation data to predict thesystemrsquos nonlinear behaviors in three cases FFT (fast Fouriertransform) converts a time domain signal of infinite durationinto a continuous spectrum composed of an infinite numberof sinusoids It can be used to analyze the motion of systemin the frequency domain In general periodic signals givepeaks at a fundamental and its harmonics quasi periodic
signals give peaks at linear combinations of two or moreirrationally related frequencies and chaotic dynamics givebroad band components to the spectrum [39] Phase planedescribes the relationship between the trajectories evolutionand the various state parameters in which each possiblestate corresponds to one unique point (attractor) Periodicmotion corresponds to closed trajectories and chaos motioncorresponds to a group of random separated points of thenever closed trajectories (strange attractor) in a certain region[40] Poincare sections are mathematical abstractions whichare often useful in highlighting the behavior of systems interms of periodic quasi-periodic and chaotic or nonlinearmotion A Poincare section consists of plotting the value oftwo components derivative of the state vector versus the vec-tor itself that is 119910(119905) and 1199101015840(119905) [41] The Lyapunov exponentsprovide a measure of the sensitivity of the system to its initialconditions They describe an average rate of divergence orconvergence of two neighboring trajectories in phase spacethus providing an indication of the sensitivity of a dynamicsystem to small local perturbations and distinguishing thechaotic and nonchaotic behaviors of the system [42 43]We use the Lyapunov exponents for quantitative analysis ofnonlinear behaviors
31 Influence of the Clearance Size In this section thedynamic behaviors of the mechanism with a series of clear-ance sizes are mainly exhibited and discussed The clearanceseries is set as 01 02 03 04 05 and 075mm The inputrotation speeds on link 1 and link 2 are 1205961 = 30 ds and 1205962 =50 ds respectively Figure 3 exhibits the velocity responses oflink 3 mass center119866 It is concluded that the velocity of link 3is influenced by the existence of the clearance The frequencyand the amplitude of fluctuation increase as the clearance sizeincreases This means the impact-contact is more serious inthe larger clearance joint Figure 4 shows the deviation of themass center position relative to the ideal position (clearance= 0) which increases with the clearance size The two figuresdemonstrate that the impact-contact between the sliderand link 3 affects the accuracy of link 3 motion increasesin the clearance and decreases in the precision of themotion
Figures 5(a) and 5(b) show the comparison of the FFTof center 119866 displacement data when the clearance is 0 and01mm respectively From Figure 5(b) it can be seen thatthe Fourier spectrum is a continuous broadband spectrumand has broader peaks as compared to Figure 5(a) whichindicates that the motion of the system is not periodic orquasi-periodic Figure 6 shows the phase plane of the velocityversus displacement of center 119866 the dynamic behavior isperiod with closed and smooth orbit in the ideal systemand tends to be chaotic with the existence of the clearanceFigure 7 shows the Poincare section which concludes thatone pointorbit on the section is consistent with periodbehavior of the system without clearance However thesystem with clearance exhibits the chaotic nature with thedense points filling up the section in fractal structure Itcan also be concluded that as the points increase they getmore dispersed with the increase in clearance which furtherindicates that the system is more unpredictable The chaotic
Mathematical Problems in Engineering 7
Clearance = 03 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 1 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 075 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Clearance = 05 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
3012 18 24 360 6Time (s)
Clearance = 0
0
300
600
900
1200
1500
1800Ve
loci
ty (m
ms
)
6 12 18 24 30 360Time (s)
Clearance = 01 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 02 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 04 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Figure 3 The velocity of mass center 119866 at different clearance sizes
Clearance = 03 mm Clearance = 1 mmClearance = 075 mmClearance = 05 mmClearance = 01 mm
Clearance = 02 mm
Clearance = 04 mm
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
r disp
lace
men
t (m
m)
0 24 3612Time (s)
Figure 4 The deviation of the mass center 119866 position relative to the ideal position
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Table 1 Basic characteristics of bodies
Bodies Length (mm) Mass (kg) Moment of inertia (kgsdotm2)Link 1 250 0392 000817Link 2 320 0502 001713Link 3 900 1412 007703Slider 4 60 0211 000003
M
P
N
Q
(a)
P
N
(b)
P
N
(c)
P
Q
(d)
O z
yT
P
e
n
t
2r
2(r + c)
O1
O2
FN
FT
(e)
Figure 2 Four possible states of the relative motion
two points on the same side To display the contact in statesclearly the impact-contact point is taken and the section viewis enlarged for all the four states Figure 2(e) is the sectionalview taken at any contact point in Figures 2(b) 2(c) and2(d) which is magnified to describe the contact states The
clearance 119888 is defined as the difference of the two diametersthe diameter of link 3 2119903 and the slider 2(119903 + 119888) The contactprocess is considered as a continuous compression processand a gradual restitution process In compression process asmall elastic deformation namely penetration 120575 occurs at
Mathematical Problems in Engineering 5
the contacting point as shown in the figure The penetration120575 expression is
120575 = 119890 minus 119888
119890 = radic(1198742119909 minus 1198741119909)2 + (1198742119910 minus 1198741119910)2(1)
where1198741 and1198742 are the center positions of the slider and link3 respectively which can be calculated from the kinematicequations in the generalized coordinates 119890 is the eccentricdistance The value of 120575 is used to detect the motion modebetween the two bodies When 120575 lt 0 the mode is free flyotherwise 120575 ge 0whichmeans impact or contact occurs thenthe contact and the deformation point can be calculated by
1198791119909 = 1198741119909 + 2 (119903 + 119888) cos (120579) 1198791119910 = 1198741119910 + 2 (119903 + 119888) sin (120579) 1198792119909 = 1198791119909 + 120575 cos (120579) 1198792119910 = 1198791119910 + 120575 sin (120579)
cos (120579) = 1198742119909 minus 1198741119909119890
(2)
where 1198791 is the initial contacting point on the slider surface1198792 is the maximum deformation point
22 Modeling of the Contact Force The impact-contact dura-tion in addition to material deformation is accompaniedby energy dissipation It can be characterized by two itemsin a normal contact force At the same time the tangentialrelative sliding and viscous phenomenon at contacting pointshould also be considered through a friction force As shownin Figure 2(e) when 120575 ge 0 the forces 119865119899 and 119865119905 are applied atthe contact point to replace the slide constraint between thetwo bodies When 120575 lt 0 the force and the slider constraintmove away and extra two degrees of freedom are introducedUnder ADAMS the normal contact force is described by theimpact function based on a typical nonlinear spring-dampermodel which is composed of two items the nonlinear pureelastic deformation force expressed by Hertz contact law andthe damping force expressed by hysteretic damping itemThenormal contact force is given by (3) and can be calculated bythe ADAMS function library
119865119873 = 119870120575119899 + 119863 120575 120575 gt 00 120575 le 0 (3)
where 119870 is the stiffness coefficient 120575 is the relative penetra-tion 119899 is the exponent set to 15 for the mental body and 119863is the hysteretic damping coefficientThe parameter119870 related
to thematerial and geometric properties of the contact bodiescan be expressed as
119870 = 4311986411987705
119864minus1 = 1 minus V211198641 + 1 minus V22
1198642 1119877 = 1
1198771 +11198772
(4)
where 119877 V and 119864 are the radii Poissonrsquos ratio and Youngrsquosmodulus for contact bodies respectively
The damping force is related to relative penetration veloc-ity and damping coefficient119863 which was widely expressed asa product of a hysteresis damping factor and an exponentialitem of penetration The damping factor is defined as afunction of the contact stiffness initial contact velocityand coefficient of restitution Over the last decades severalformulations for the damping factor have been proposedwhich was compared in detail by Alves et al [38] In presentwork the damping factor is expressed in maximum dampingcoefficient form and the damping coefficient 119863 is expressedas a step function to avoid discontinuity of damping force
119863 = STEP (120575 0 0 119889max 119862max)
=
0 120575 le 0119862max ( 120575
119889max)2
(3 minus 2 120575119889max
) 0 lt 120575 lt 119889max
119862max 120575 ge 119889max
(5)
where 119889max is the maximum penetration which determineswhen the damping force reaches maximum 119862max is themaximum damping coefficient related to the material whichrepresents the loss of energy resulting from collisions Whenthe penetration is less than the maximum the damping coef-ficient is a cubic function of the penetration and 119862max Thedamping force increases with the increase in the penetrationWhen the penetration reaches 119889max the damping coefficientraises to the maximum 119862max and the damping force reachesmaximum A recommended value for 119889max is 01mm and119862max is one percent of the stiffness coefficient of the material
The tangential friction force at contact point follows themodified Coulombrsquos friction law given by
119865119879 = minus120583119865119873 V1198791003816100381610038161003816V1198791003816100381610038161003816
120583 =
120583119889 1003816100381610038161003816V1198791003816100381610038161003816 ge ]119889
STEP (1003816100381610038161003816V1198791003816100381610038161003816 V119889 120583119889 V119904 120583119904) ]119904 lt 1003816100381610038161003816V1198791003816100381610038161003816 lt ]119889
120583119904 1003816100381610038161003816V1198791003816100381610038161003816 le ]119904
(6)
where 120583119889 is the coefficient of dynamic friction 120583119904 is thecoefficient of static friction V119879 is the relative tangentialvelocity of the contact point ]119889 and ]119904 are the absolutevelocity thresholds for the transition from dynamic frictionto static friction
6 Mathematical Problems in Engineering
Table 2 Simulation parameters
Simulation parameters119870 10 times 105 Nmm119863 58Nsdotsmm120583119889 01120583119904 03119864 207GPa] 029Step size 01 sSimulation time 120 s
3 Results and Discussion
In this section we study the effect of initial conditions onthe dynamic responses of the planar mechanism with twodriving links and prismatic pair clearance Three cases areconsidered a series of clearance sizes a group of constantdrive speeds and a variable drive speed The simulationmodel presented in Figure 1 is completed for the threecases and basic conditions listed in Table 2 The numericalsolution is performed on ADAMSSolver In fact becauseof the frequent transition between the different states thecontact instant detection is another important task exceptthe solution of the dynamic equation for numerical issuein impact-contact events If the contact instant and pointare not detected precisely the penetration and the contactforce may become abnormally large and eventually resultin the termination of the integration process For accuracyand efficiency variable time step integral algorithms arewidely utilized to gradually narrow the scope of the detectionaccording to the calculation of the distance between thecontacting bodies Other measures like small time stepshort simulation time simple model and so forth are alsoeffective for finding the contact instant exactly In the presentwork the default stiff integrator GSTIFF and the defaultintegrator formulation I3 were selected for better compu-tational efficiency and good results The corrector controlsthe integration tolerance of 0001 and the simulation is set to10 periods of link 1 revolution In order to avoid the contactdetection failure due to the influence of the large amount ofintermediate data that occurred during the long time simu-lation a larger step size was selected to run all simulationscontinuous
Implementing the numerical simulation the perfor-mances of velocity and position of the mass center of link3 are presented to exhibit the dynamic responses of themechanism at different initial conditions Furthermore FFTphase plane Poincare section and largest Lyapunov exponentare calculated based on the simulation data to predict thesystemrsquos nonlinear behaviors in three cases FFT (fast Fouriertransform) converts a time domain signal of infinite durationinto a continuous spectrum composed of an infinite numberof sinusoids It can be used to analyze the motion of systemin the frequency domain In general periodic signals givepeaks at a fundamental and its harmonics quasi periodic
signals give peaks at linear combinations of two or moreirrationally related frequencies and chaotic dynamics givebroad band components to the spectrum [39] Phase planedescribes the relationship between the trajectories evolutionand the various state parameters in which each possiblestate corresponds to one unique point (attractor) Periodicmotion corresponds to closed trajectories and chaos motioncorresponds to a group of random separated points of thenever closed trajectories (strange attractor) in a certain region[40] Poincare sections are mathematical abstractions whichare often useful in highlighting the behavior of systems interms of periodic quasi-periodic and chaotic or nonlinearmotion A Poincare section consists of plotting the value oftwo components derivative of the state vector versus the vec-tor itself that is 119910(119905) and 1199101015840(119905) [41] The Lyapunov exponentsprovide a measure of the sensitivity of the system to its initialconditions They describe an average rate of divergence orconvergence of two neighboring trajectories in phase spacethus providing an indication of the sensitivity of a dynamicsystem to small local perturbations and distinguishing thechaotic and nonchaotic behaviors of the system [42 43]We use the Lyapunov exponents for quantitative analysis ofnonlinear behaviors
31 Influence of the Clearance Size In this section thedynamic behaviors of the mechanism with a series of clear-ance sizes are mainly exhibited and discussed The clearanceseries is set as 01 02 03 04 05 and 075mm The inputrotation speeds on link 1 and link 2 are 1205961 = 30 ds and 1205962 =50 ds respectively Figure 3 exhibits the velocity responses oflink 3 mass center119866 It is concluded that the velocity of link 3is influenced by the existence of the clearance The frequencyand the amplitude of fluctuation increase as the clearance sizeincreases This means the impact-contact is more serious inthe larger clearance joint Figure 4 shows the deviation of themass center position relative to the ideal position (clearance= 0) which increases with the clearance size The two figuresdemonstrate that the impact-contact between the sliderand link 3 affects the accuracy of link 3 motion increasesin the clearance and decreases in the precision of themotion
Figures 5(a) and 5(b) show the comparison of the FFTof center 119866 displacement data when the clearance is 0 and01mm respectively From Figure 5(b) it can be seen thatthe Fourier spectrum is a continuous broadband spectrumand has broader peaks as compared to Figure 5(a) whichindicates that the motion of the system is not periodic orquasi-periodic Figure 6 shows the phase plane of the velocityversus displacement of center 119866 the dynamic behavior isperiod with closed and smooth orbit in the ideal systemand tends to be chaotic with the existence of the clearanceFigure 7 shows the Poincare section which concludes thatone pointorbit on the section is consistent with periodbehavior of the system without clearance However thesystem with clearance exhibits the chaotic nature with thedense points filling up the section in fractal structure Itcan also be concluded that as the points increase they getmore dispersed with the increase in clearance which furtherindicates that the system is more unpredictable The chaotic
Mathematical Problems in Engineering 7
Clearance = 03 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 1 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 075 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Clearance = 05 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
3012 18 24 360 6Time (s)
Clearance = 0
0
300
600
900
1200
1500
1800Ve
loci
ty (m
ms
)
6 12 18 24 30 360Time (s)
Clearance = 01 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 02 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 04 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Figure 3 The velocity of mass center 119866 at different clearance sizes
Clearance = 03 mm Clearance = 1 mmClearance = 075 mmClearance = 05 mmClearance = 01 mm
Clearance = 02 mm
Clearance = 04 mm
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
r disp
lace
men
t (m
m)
0 24 3612Time (s)
Figure 4 The deviation of the mass center 119866 position relative to the ideal position
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
the contacting point as shown in the figure The penetration120575 expression is
120575 = 119890 minus 119888
119890 = radic(1198742119909 minus 1198741119909)2 + (1198742119910 minus 1198741119910)2(1)
where1198741 and1198742 are the center positions of the slider and link3 respectively which can be calculated from the kinematicequations in the generalized coordinates 119890 is the eccentricdistance The value of 120575 is used to detect the motion modebetween the two bodies When 120575 lt 0 the mode is free flyotherwise 120575 ge 0whichmeans impact or contact occurs thenthe contact and the deformation point can be calculated by
1198791119909 = 1198741119909 + 2 (119903 + 119888) cos (120579) 1198791119910 = 1198741119910 + 2 (119903 + 119888) sin (120579) 1198792119909 = 1198791119909 + 120575 cos (120579) 1198792119910 = 1198791119910 + 120575 sin (120579)
cos (120579) = 1198742119909 minus 1198741119909119890
(2)
where 1198791 is the initial contacting point on the slider surface1198792 is the maximum deformation point
22 Modeling of the Contact Force The impact-contact dura-tion in addition to material deformation is accompaniedby energy dissipation It can be characterized by two itemsin a normal contact force At the same time the tangentialrelative sliding and viscous phenomenon at contacting pointshould also be considered through a friction force As shownin Figure 2(e) when 120575 ge 0 the forces 119865119899 and 119865119905 are applied atthe contact point to replace the slide constraint between thetwo bodies When 120575 lt 0 the force and the slider constraintmove away and extra two degrees of freedom are introducedUnder ADAMS the normal contact force is described by theimpact function based on a typical nonlinear spring-dampermodel which is composed of two items the nonlinear pureelastic deformation force expressed by Hertz contact law andthe damping force expressed by hysteretic damping itemThenormal contact force is given by (3) and can be calculated bythe ADAMS function library
119865119873 = 119870120575119899 + 119863 120575 120575 gt 00 120575 le 0 (3)
where 119870 is the stiffness coefficient 120575 is the relative penetra-tion 119899 is the exponent set to 15 for the mental body and 119863is the hysteretic damping coefficientThe parameter119870 related
to thematerial and geometric properties of the contact bodiescan be expressed as
119870 = 4311986411987705
119864minus1 = 1 minus V211198641 + 1 minus V22
1198642 1119877 = 1
1198771 +11198772
(4)
where 119877 V and 119864 are the radii Poissonrsquos ratio and Youngrsquosmodulus for contact bodies respectively
The damping force is related to relative penetration veloc-ity and damping coefficient119863 which was widely expressed asa product of a hysteresis damping factor and an exponentialitem of penetration The damping factor is defined as afunction of the contact stiffness initial contact velocityand coefficient of restitution Over the last decades severalformulations for the damping factor have been proposedwhich was compared in detail by Alves et al [38] In presentwork the damping factor is expressed in maximum dampingcoefficient form and the damping coefficient 119863 is expressedas a step function to avoid discontinuity of damping force
119863 = STEP (120575 0 0 119889max 119862max)
=
0 120575 le 0119862max ( 120575
119889max)2
(3 minus 2 120575119889max
) 0 lt 120575 lt 119889max
119862max 120575 ge 119889max
(5)
where 119889max is the maximum penetration which determineswhen the damping force reaches maximum 119862max is themaximum damping coefficient related to the material whichrepresents the loss of energy resulting from collisions Whenthe penetration is less than the maximum the damping coef-ficient is a cubic function of the penetration and 119862max Thedamping force increases with the increase in the penetrationWhen the penetration reaches 119889max the damping coefficientraises to the maximum 119862max and the damping force reachesmaximum A recommended value for 119889max is 01mm and119862max is one percent of the stiffness coefficient of the material
The tangential friction force at contact point follows themodified Coulombrsquos friction law given by
119865119879 = minus120583119865119873 V1198791003816100381610038161003816V1198791003816100381610038161003816
120583 =
120583119889 1003816100381610038161003816V1198791003816100381610038161003816 ge ]119889
STEP (1003816100381610038161003816V1198791003816100381610038161003816 V119889 120583119889 V119904 120583119904) ]119904 lt 1003816100381610038161003816V1198791003816100381610038161003816 lt ]119889
120583119904 1003816100381610038161003816V1198791003816100381610038161003816 le ]119904
(6)
where 120583119889 is the coefficient of dynamic friction 120583119904 is thecoefficient of static friction V119879 is the relative tangentialvelocity of the contact point ]119889 and ]119904 are the absolutevelocity thresholds for the transition from dynamic frictionto static friction
6 Mathematical Problems in Engineering
Table 2 Simulation parameters
Simulation parameters119870 10 times 105 Nmm119863 58Nsdotsmm120583119889 01120583119904 03119864 207GPa] 029Step size 01 sSimulation time 120 s
3 Results and Discussion
In this section we study the effect of initial conditions onthe dynamic responses of the planar mechanism with twodriving links and prismatic pair clearance Three cases areconsidered a series of clearance sizes a group of constantdrive speeds and a variable drive speed The simulationmodel presented in Figure 1 is completed for the threecases and basic conditions listed in Table 2 The numericalsolution is performed on ADAMSSolver In fact becauseof the frequent transition between the different states thecontact instant detection is another important task exceptthe solution of the dynamic equation for numerical issuein impact-contact events If the contact instant and pointare not detected precisely the penetration and the contactforce may become abnormally large and eventually resultin the termination of the integration process For accuracyand efficiency variable time step integral algorithms arewidely utilized to gradually narrow the scope of the detectionaccording to the calculation of the distance between thecontacting bodies Other measures like small time stepshort simulation time simple model and so forth are alsoeffective for finding the contact instant exactly In the presentwork the default stiff integrator GSTIFF and the defaultintegrator formulation I3 were selected for better compu-tational efficiency and good results The corrector controlsthe integration tolerance of 0001 and the simulation is set to10 periods of link 1 revolution In order to avoid the contactdetection failure due to the influence of the large amount ofintermediate data that occurred during the long time simu-lation a larger step size was selected to run all simulationscontinuous
Implementing the numerical simulation the perfor-mances of velocity and position of the mass center of link3 are presented to exhibit the dynamic responses of themechanism at different initial conditions Furthermore FFTphase plane Poincare section and largest Lyapunov exponentare calculated based on the simulation data to predict thesystemrsquos nonlinear behaviors in three cases FFT (fast Fouriertransform) converts a time domain signal of infinite durationinto a continuous spectrum composed of an infinite numberof sinusoids It can be used to analyze the motion of systemin the frequency domain In general periodic signals givepeaks at a fundamental and its harmonics quasi periodic
signals give peaks at linear combinations of two or moreirrationally related frequencies and chaotic dynamics givebroad band components to the spectrum [39] Phase planedescribes the relationship between the trajectories evolutionand the various state parameters in which each possiblestate corresponds to one unique point (attractor) Periodicmotion corresponds to closed trajectories and chaos motioncorresponds to a group of random separated points of thenever closed trajectories (strange attractor) in a certain region[40] Poincare sections are mathematical abstractions whichare often useful in highlighting the behavior of systems interms of periodic quasi-periodic and chaotic or nonlinearmotion A Poincare section consists of plotting the value oftwo components derivative of the state vector versus the vec-tor itself that is 119910(119905) and 1199101015840(119905) [41] The Lyapunov exponentsprovide a measure of the sensitivity of the system to its initialconditions They describe an average rate of divergence orconvergence of two neighboring trajectories in phase spacethus providing an indication of the sensitivity of a dynamicsystem to small local perturbations and distinguishing thechaotic and nonchaotic behaviors of the system [42 43]We use the Lyapunov exponents for quantitative analysis ofnonlinear behaviors
31 Influence of the Clearance Size In this section thedynamic behaviors of the mechanism with a series of clear-ance sizes are mainly exhibited and discussed The clearanceseries is set as 01 02 03 04 05 and 075mm The inputrotation speeds on link 1 and link 2 are 1205961 = 30 ds and 1205962 =50 ds respectively Figure 3 exhibits the velocity responses oflink 3 mass center119866 It is concluded that the velocity of link 3is influenced by the existence of the clearance The frequencyand the amplitude of fluctuation increase as the clearance sizeincreases This means the impact-contact is more serious inthe larger clearance joint Figure 4 shows the deviation of themass center position relative to the ideal position (clearance= 0) which increases with the clearance size The two figuresdemonstrate that the impact-contact between the sliderand link 3 affects the accuracy of link 3 motion increasesin the clearance and decreases in the precision of themotion
Figures 5(a) and 5(b) show the comparison of the FFTof center 119866 displacement data when the clearance is 0 and01mm respectively From Figure 5(b) it can be seen thatthe Fourier spectrum is a continuous broadband spectrumand has broader peaks as compared to Figure 5(a) whichindicates that the motion of the system is not periodic orquasi-periodic Figure 6 shows the phase plane of the velocityversus displacement of center 119866 the dynamic behavior isperiod with closed and smooth orbit in the ideal systemand tends to be chaotic with the existence of the clearanceFigure 7 shows the Poincare section which concludes thatone pointorbit on the section is consistent with periodbehavior of the system without clearance However thesystem with clearance exhibits the chaotic nature with thedense points filling up the section in fractal structure Itcan also be concluded that as the points increase they getmore dispersed with the increase in clearance which furtherindicates that the system is more unpredictable The chaotic
Mathematical Problems in Engineering 7
Clearance = 03 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 1 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 075 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Clearance = 05 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
3012 18 24 360 6Time (s)
Clearance = 0
0
300
600
900
1200
1500
1800Ve
loci
ty (m
ms
)
6 12 18 24 30 360Time (s)
Clearance = 01 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 02 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 04 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Figure 3 The velocity of mass center 119866 at different clearance sizes
Clearance = 03 mm Clearance = 1 mmClearance = 075 mmClearance = 05 mmClearance = 01 mm
Clearance = 02 mm
Clearance = 04 mm
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
r disp
lace
men
t (m
m)
0 24 3612Time (s)
Figure 4 The deviation of the mass center 119866 position relative to the ideal position
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Table 2 Simulation parameters
Simulation parameters119870 10 times 105 Nmm119863 58Nsdotsmm120583119889 01120583119904 03119864 207GPa] 029Step size 01 sSimulation time 120 s
3 Results and Discussion
In this section we study the effect of initial conditions onthe dynamic responses of the planar mechanism with twodriving links and prismatic pair clearance Three cases areconsidered a series of clearance sizes a group of constantdrive speeds and a variable drive speed The simulationmodel presented in Figure 1 is completed for the threecases and basic conditions listed in Table 2 The numericalsolution is performed on ADAMSSolver In fact becauseof the frequent transition between the different states thecontact instant detection is another important task exceptthe solution of the dynamic equation for numerical issuein impact-contact events If the contact instant and pointare not detected precisely the penetration and the contactforce may become abnormally large and eventually resultin the termination of the integration process For accuracyand efficiency variable time step integral algorithms arewidely utilized to gradually narrow the scope of the detectionaccording to the calculation of the distance between thecontacting bodies Other measures like small time stepshort simulation time simple model and so forth are alsoeffective for finding the contact instant exactly In the presentwork the default stiff integrator GSTIFF and the defaultintegrator formulation I3 were selected for better compu-tational efficiency and good results The corrector controlsthe integration tolerance of 0001 and the simulation is set to10 periods of link 1 revolution In order to avoid the contactdetection failure due to the influence of the large amount ofintermediate data that occurred during the long time simu-lation a larger step size was selected to run all simulationscontinuous
Implementing the numerical simulation the perfor-mances of velocity and position of the mass center of link3 are presented to exhibit the dynamic responses of themechanism at different initial conditions Furthermore FFTphase plane Poincare section and largest Lyapunov exponentare calculated based on the simulation data to predict thesystemrsquos nonlinear behaviors in three cases FFT (fast Fouriertransform) converts a time domain signal of infinite durationinto a continuous spectrum composed of an infinite numberof sinusoids It can be used to analyze the motion of systemin the frequency domain In general periodic signals givepeaks at a fundamental and its harmonics quasi periodic
signals give peaks at linear combinations of two or moreirrationally related frequencies and chaotic dynamics givebroad band components to the spectrum [39] Phase planedescribes the relationship between the trajectories evolutionand the various state parameters in which each possiblestate corresponds to one unique point (attractor) Periodicmotion corresponds to closed trajectories and chaos motioncorresponds to a group of random separated points of thenever closed trajectories (strange attractor) in a certain region[40] Poincare sections are mathematical abstractions whichare often useful in highlighting the behavior of systems interms of periodic quasi-periodic and chaotic or nonlinearmotion A Poincare section consists of plotting the value oftwo components derivative of the state vector versus the vec-tor itself that is 119910(119905) and 1199101015840(119905) [41] The Lyapunov exponentsprovide a measure of the sensitivity of the system to its initialconditions They describe an average rate of divergence orconvergence of two neighboring trajectories in phase spacethus providing an indication of the sensitivity of a dynamicsystem to small local perturbations and distinguishing thechaotic and nonchaotic behaviors of the system [42 43]We use the Lyapunov exponents for quantitative analysis ofnonlinear behaviors
31 Influence of the Clearance Size In this section thedynamic behaviors of the mechanism with a series of clear-ance sizes are mainly exhibited and discussed The clearanceseries is set as 01 02 03 04 05 and 075mm The inputrotation speeds on link 1 and link 2 are 1205961 = 30 ds and 1205962 =50 ds respectively Figure 3 exhibits the velocity responses oflink 3 mass center119866 It is concluded that the velocity of link 3is influenced by the existence of the clearance The frequencyand the amplitude of fluctuation increase as the clearance sizeincreases This means the impact-contact is more serious inthe larger clearance joint Figure 4 shows the deviation of themass center position relative to the ideal position (clearance= 0) which increases with the clearance size The two figuresdemonstrate that the impact-contact between the sliderand link 3 affects the accuracy of link 3 motion increasesin the clearance and decreases in the precision of themotion
Figures 5(a) and 5(b) show the comparison of the FFTof center 119866 displacement data when the clearance is 0 and01mm respectively From Figure 5(b) it can be seen thatthe Fourier spectrum is a continuous broadband spectrumand has broader peaks as compared to Figure 5(a) whichindicates that the motion of the system is not periodic orquasi-periodic Figure 6 shows the phase plane of the velocityversus displacement of center 119866 the dynamic behavior isperiod with closed and smooth orbit in the ideal systemand tends to be chaotic with the existence of the clearanceFigure 7 shows the Poincare section which concludes thatone pointorbit on the section is consistent with periodbehavior of the system without clearance However thesystem with clearance exhibits the chaotic nature with thedense points filling up the section in fractal structure Itcan also be concluded that as the points increase they getmore dispersed with the increase in clearance which furtherindicates that the system is more unpredictable The chaotic
Mathematical Problems in Engineering 7
Clearance = 03 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 1 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 075 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Clearance = 05 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
3012 18 24 360 6Time (s)
Clearance = 0
0
300
600
900
1200
1500
1800Ve
loci
ty (m
ms
)
6 12 18 24 30 360Time (s)
Clearance = 01 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 02 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 04 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Figure 3 The velocity of mass center 119866 at different clearance sizes
Clearance = 03 mm Clearance = 1 mmClearance = 075 mmClearance = 05 mmClearance = 01 mm
Clearance = 02 mm
Clearance = 04 mm
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
r disp
lace
men
t (m
m)
0 24 3612Time (s)
Figure 4 The deviation of the mass center 119866 position relative to the ideal position
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
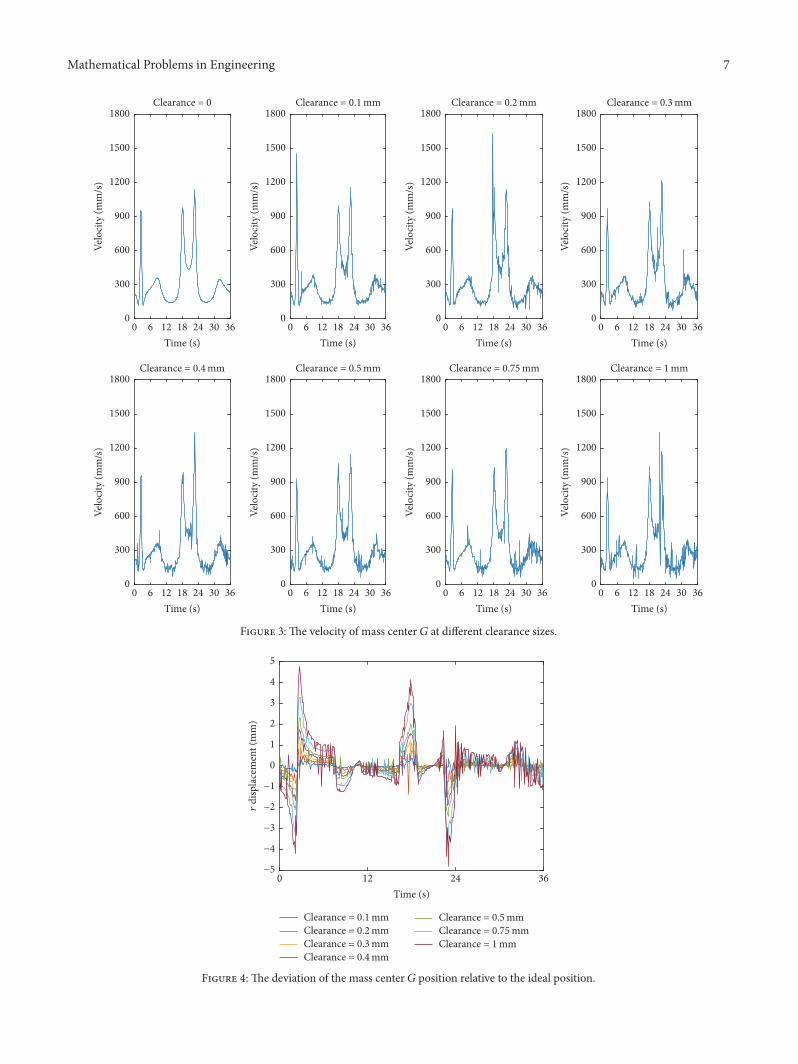
Mathematical Problems in Engineering 7
Clearance = 03 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 1 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 075 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Clearance = 05 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
3012 18 24 360 6Time (s)
Clearance = 0
0
300
600
900
1200
1500
1800Ve
loci
ty (m
ms
)
6 12 18 24 30 360Time (s)
Clearance = 01 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 02 mm
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
6 12 18 24 30 360Time (s)
Clearance = 04 mm
6 12 18 24 30 360Time (s)
0
300
600
900
1200
1500
1800
Velo
city
(mm
s)
Figure 3 The velocity of mass center 119866 at different clearance sizes
Clearance = 03 mm Clearance = 1 mmClearance = 075 mmClearance = 05 mmClearance = 01 mm
Clearance = 02 mm
Clearance = 04 mm
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
r disp
lace
men
t (m
m)
0 24 3612Time (s)
Figure 4 The deviation of the mass center 119866 position relative to the ideal position
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
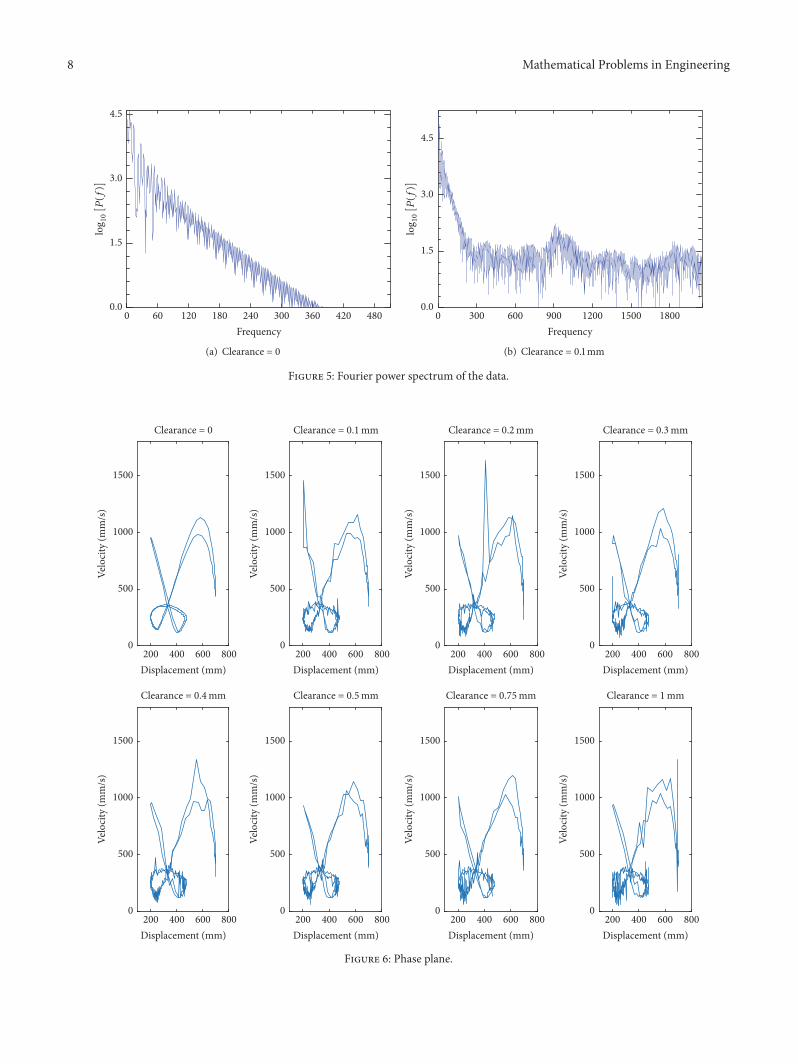
8 Mathematical Problems in Engineering
00
15
30
45
60 120 180 420300 360 4800 240Frequency
FIA10[P
(f)]
(a) Clearance = 0
300 600 900 1200 1500 1800Frequency
000
15
30
45
FIA10[P
(f)]
(b) Clearance = 01mm
Figure 5 Fourier power spectrum of the data
Clearance = 0
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 01 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 02 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 03 mm
0
500
1000
1500
Velo
city
(mm
s)
400 600 800200Displacement (mm)
Clearance = 04 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 05 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 075 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Clearance = 1 mm
400 600 800200Displacement (mm)
0
500
1000
1500
Velo
city
(mm
s)
Figure 6 Phase plane
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Mathematical Problems in Engineering 9
Clearance = 03 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 02 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 01 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 0 mm
100
200
300
400
500
600
700
800r n
+1
400 600 800200rn
Clearance = 04 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 05 mm
100
200
300
400
500
600
700
800
r n+1
Clearance = 075 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
Clearance = 1 mm
100
200
300
400
500
600
700
800
r n+1
400 600 800200rn
400 600 800200rn
Figure 7 Poincare section
behavior is related to the unpredictable and random motionstates between the two elements of the clearance joints dueto which there is uncertainty in the contact and the frictionforce Furthermore the system is extremely sensitive to initialconditions of the clearance size Figure 8 shows the largestLyapunov exponents with respect to the series clearance sizeIn this work a practical algorithm provided by Rosenstein etal [44] is adapted to calculate the largest Lyapunov exponentBased on the simulation results of 119866 position in the formof time series the state space is reconstructed using themethod of time delays thus the Euclidean distance betweenthe nearest neighbors is deduced Then the largest Lyapunovexponent is calculated through the slope of the linear best-fit of the Euclidean distance A negative Lyapunov exponentindicates local stability whereas a positive Lyapunov expo-nent indicates local instability Larger Lyapunov exponentsindicate greater sensitivity to local perturbations [43] FromFigure 8 two points can be concluded the system withclearance has divergence trend and chaotic nature signifiedby the largest Lyapunov exponents which are all biggerthan zero the largest Lyapunov exponents increase with theincrease in clearance size
Table 3 Groups of link 1 speeds
Groups 1 2 3 4 51205961 (ds) 30 40 50 60 701205962 (ds) 50 50 50 50 50
32 Influence of the Constant Input Speed Influence of theinput rotation speeds on the dynamic behavior of the planarmechanismwith clearance joint is investigated in this sectionFour groups of constant input speeds are set respectively inTable 3 the clearance size is set to 05mm Figure 9 showsthe largest Lyapunov exponents calculated for the four groupsof input speeds It is clear that the system having clearanceexhibits nonlinear behavior at different link 1 speeds It canalso be seen that the largest Lyapunov exponents increase aslink 1 speeds increase Also the velocity andposition responseshows the decrease in precision with the increase in inputspeeds
33 Influence of the Variable Input Speed In this section theclearance size is set to the same series as Section 31 The
10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
02
03
04
05
06
07
08
Larg
est L
yapu
nov
expo
nent
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
Figure 8 Largest Lyapunov exponents for a set of series clearance size
04
045
05
055
06
065
07
Larg
est L
yapu
nov
expo
nent
30 35 40 45 50 55 60 6525Omega 1
Figure 9 Largest Lyapunov exponent for different link 1 speeds and clearance 05mm
input speed is described by a profile calculated through thefollowing formulation
1198721 = 11987210 (1 minus 120596112059610)
1198722 = 11987210 (1 minus 120596212059620)
(7)
where 1198721 and 1198722 are the torques with constant rotationspeeds 12059610 of 30 ds and 12059620 of 50 ds respectively in themechanism with idea joint11987210 is a constant value
From (7) two variable input speeds 1205961 on link 1 and 1205962on link 2 can be calculated and plotted versus time as shownin Figure 10
The largest Lyapunov exponents calculated at the condi-tion of variable input speeds and a series clearance size are
shown in Figure 11 The system exhibits the same nonlineartendency as in the other two cases
4 Conclusion
In this paper the effect of clearance size and input speed onthe dynamic performance is investigated on a mechanismwith two driving linksThe continuous contact force insertedin the multibody dynamic methodology is employed tobuild the numerical model of system The simulation resultsshow that the dynamic of the mechanism system is changeddramatically This change can be seen from the increasefluctuations of motion as the clearance size and input speedincrease The nonlinear characteristic of the mechanismsystem is analyzed using FFT phase plane Poincare sectionand largest Lyapunov exponentsThe systemhas the tendencyto move from chaotic to period with decrease in clearance
Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
12 240 36Time (s)
0
01
02
03
04
05
06
07
08
Ang
ular
vel
ocity
1
0
05
1
15
2
25
Ang
ular
vel
ocity
12 24 360Time (s)
2
Figure 10 The variable angular velocity 1205961 on link 1 and 1205962 on link 2
01 02 03 04 05 06 07 08 09 1 110Clearance (mm)
02
025
03
035
04
045
05
055
06
Larg
est L
yapu
nov
expo
nent
Figure 11 Largest Lyapunov exponents for variable input speeds anda series clearance size
The largest Lyapunov exponents increase with the increasein clearance whether the input speed is constant or variableChange in input speed gives similar results when the clear-ance set to constant that is increase in input speed willincrease the largest Lyapunov exponents
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was partially supported by the Shanghai KeyLaboratory for Networked Manufacturing and EnterpriseInformation
References
[1] S Dubowsky and F Freudenstein ldquoDynamic analysis ofmechanical systems with clearances part 2 dynamic responserdquoJournal of Engineering for Industry vol 93 no 1 pp 310ndash3161971
[2] S Erkaya and I Uzmay ldquoExperimental investigation of jointclearance effects on the dynamics of a slider-crankmechanismrdquoMultibody System Dynamics vol 24 no 1 pp 81ndash102 2010
[3] P Flores C S Koshy H M Lankarani J Ambrosio andJ C P Claro ldquoNumerical and experimental investigation onmultibody systems with revolute clearance jointsrdquo NonlinearDynamics vol 65 no 4 pp 383ndash398 2011
[4] M Houfek and L Houfek ldquoBifurcation and chaos in couplingswith clearancerdquo Advanced Materials Research vol 936 pp2120ndash2124 2014
[5] S Yaqubi M Dardel and H M Daniali ldquoNonlinear dynamicsand control of crank-slider mechanism with link flexibility andjoint clearancerdquo Proceedings of the Institution of MechanicalEngineers Part C Journal of Mechanical Engineering Sciencevol 230 no 5 pp 737ndash755 2016
[6] Z Wang Q Tian H Hu and P Flores ldquoNonlinear dynamicsand chaotic control of a flexible multibody system with uncer-tain joint clearancerdquo Nonlinear Dynamics vol 86 no 3 pp1571ndash1597 2016
[7] M Dupac and D G Beale ldquoDynamic analysis of a flexiblelinkage mechanism with cracks and clearancerdquoMechanism andMachine Theory vol 45 no 12 pp 1909ndash1923 2010
[8] P Flores J Ambrosio J C P Claro and H M LankaranildquoDynamic behaviour of planar rigidmulti-body systems includ-ing revolute joints with clearancerdquo Proceedings of the Institutionof Mechanical Engineers Part K Journal of Multi-body Dynam-ics vol 221 no 2 pp 161ndash174 2007
[9] A B Nordmark ldquoNon-periodic motion caused by grazing inci-dence in an impact oscillatorrdquo Journal of Sound and Vibrationvol 145 no 2 pp 279ndash297 1991
[10] M Zukovic and L Cveticanin ldquoChaotic responses in a stableduffing system of non-ideal typerdquo JVCJournal of Vibration andControl vol 13 no 6 pp 751ndash767 2007
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
12 Mathematical Problems in Engineering
[11] S Erkaya and I Uzmay ldquoInvestigation on effect of jointclearance on dynamics of four-bar mechanismrdquo NonlinearDynamics vol 58 no 1-2 pp 179ndash198 2009
[12] O Muvengei J Kihiu and B Ikua ldquoDynamic analysis of planarmulti-body systems with LuGre friction at differently locatedrevolute clearance jointsrdquo Multibody System Dynamics vol 28no 4 pp 369ndash393 2012
[13] S P Timoshenko and J M Gere Theory of Elastic StabilityCourier Corporation 2009
[14] H Hertz ldquoUher die beruhrung fester elastischer korper (onthe contact of elastic solids)rdquo Journal fur die Reine und Andeg-wandte Mathematik vol 92 pp 156ndash171 1882
[15] K Hunt and F Crossley ldquoCoefficient of restitution interpretedas damping in vibroimpactrdquo Journal of Applied Mechanics vol42 no 2 pp 440ndash445 1975
[16] H Lankarani and P E Nikravesh ldquoA contact force model withhysteresis damping for impact analysis of multibody systemsrdquoJournal of Mechanical Design vol 112 no 3 pp 369ndash376 1990
[17] P Ravn ldquoA continuous analysis method for planar multibodysystems with joint clearancerdquoMultibody System Dynamics vol2 no 1 pp 1ndash24 1998
[18] P Flores and J Ambrosio ldquoRevolute joints with clearance inmultibody systemsrdquo Computers amp Structures vol 82 no 17 pp1359ndash1369 2004
[19] A L Schwab J P Meijaard and P Meijers ldquoA comparisonof revolute joint clearance models in the dynamic analysis ofrigid and elastic mechanical systemsrdquoMechanism and MachineTheory vol 37 no 9 pp 895ndash913 2002
[20] Z F Bai and Y Zhao ldquoDynamic behaviour analysis of planarmechanical systems with clearance in revolute joints usinga new hybrid contact force modelrdquo International Journal ofMechanical Sciences vol 54 no 1 pp 190ndash205 2012
[21] P Flores M MacHado M T Silva and J M Martins ldquoOn thecontinuous contact forcemodels for softmaterials inmultibodydynamicsrdquoMultibody System Dynamics vol 25 no 3 pp 357ndash375 2011
[22] MGharib andYHurmuzlu ldquoAnew contact forcemodel for lowcoefficient of restitution impactrdquo Journal of Applied MechanicsTransactions ASME vol 79 no 6 Article ID 064506 2012
[23] J Ma L Qian G Chen and M Li ldquoDynamic analysis ofmechanical systems with planar revolute joints with clearancerdquoMechanism and Machine Theory vol 94 article no 2549 pp148ndash164 2015
[24] T Kane ldquoImpulsive motionsrdquo Journal of AppliedMechanics vol29 no 4 pp 715ndash718 1962
[25] D B Marghitu and Y Hurmuzlu ldquoNonlinear dynamics ofan elastic rod with frictional impactrdquo Nonlinear DynamicsAn International Journal of Nonlinear Dynamics and Chaos inEngineering Systems vol 10 no 2 pp 187ndash201 1996
[26] E D Stoenescu and D B Marghitu ldquoDynamic analysis ofa planar rigid-link mechanism with rotating slider joint andclearancerdquo Journal of Sound and Vibration vol 266 no 2 pp394ndash404 2003
[27] I Khemili and L Romdhane ldquoDynamic analysis of a flexibleslider-crank mechanism with clearancerdquo European Journal ofMechanicsmdashASolids vol 27 no 5 pp 882ndash898 2008
[28] G B Daniel and K L Cavalca ldquoAnalysis of the dynamics of aslider-crank mechanism with hydrodynamic lubrication in theconnecting rod-slider joint clearancerdquoMechanism andMachineTheory vol 46 no 10 pp 1434ndash1452 2011
[29] E Zheng R Zhu S Zhu and X Lu ldquoA study on dynamics offlexible multi-link mechanism including joints with clearanceand lubrication for ultra-precision pressesrdquo Nonlinear Dynam-ics An International Journal of Nonlinear Dynamics and Chaosin Engineering Systems vol 83 no 1-2 pp 137ndash159 2016
[30] P Gu S Dubowsky and CMavroidis ldquoThe design implicationsof chaotic and near-chaotic vibrations in machinesrdquo in Proceed-ings of the 1998 ASME Design Technical Conferences 1998
[31] K Kappaganthu and C Nataraj ldquoNonlinear modeling andanalysis of a rolling element bearing with a clearancerdquo Commu-nications inNonlinear Science andNumerical Simulation vol 16no 10 pp 4134ndash4145 2011
[32] L D Seneviratne and S W E Earles ldquoChaotic behaviourexhibited during contact loss in a clearance joint of a four-barmechanismrdquoMechanism and MachineTheory vol 27 no 3 pp307ndash321 1992
[33] F Farahanchi and S W Shaw ldquoChaotic and periodic dynamicsof a slider-crank mechanism with slider clearancerdquo Journal ofSound and Vibration vol 177 no 3 pp 307ndash324 1994
[34] P Flores ldquoAparametric study on the dynamic response of planarmultibody systems with multiple clearance jointsrdquo NonlinearDynamics vol 61 no 4 pp 633ndash653 2010
[35] A Azimi Olyaei and M R Ghazavi ldquoStabilizing slider-crankmechanism with clearance jointsrdquo Mechanism and MachineTheory vol 53 pp 17ndash29 2012
[36] O Muvengei J Kihiu and B Ikua ldquoNumerical study of para-metric effects on the dynamic response of planar multi-bodysystems with differently located frictionless revolute clearancejointsrdquoMechanism andMachineTheory vol 53 pp 30ndash49 2012
[37] Y Tang Z Chang X Dong Y Hu and Z Yu ldquoNonlineardynamics and analysis of a four-bar linkage with clearancerdquoFrontiers of Mechanical Engineering vol 8 no 2 pp 160ndash1682013
[38] J Alves N Peixinho M T Da Silva P Flores and H MLankarani ldquoA comparative study of the viscoelastic constitutivemodels for frictionless contact interfaces in solidsrdquoMechanismand Machine Theory vol 85 pp 172ndash188 2015
[39] P Welch ldquoThe use of fast fourier transform for the estimationof power spectra a method based on time averaging overshortmodified periodogramsrdquo IEEETransactions onAudio andElectroacoustics vol 15 no 2 pp 70ndash73 1967
[40] M W Hirsch S Smale and R L Devaney DifferentialEquations Dynamical Systems and an Introduction to ChaosAcademic press 2012
[41] S Wiggins Introduction to Applied Nonlinear Dynamical Sys-tems and Chaos vol 2 Springer Science+Business Media 2003
[42] A Wolf J B Swift H L Swinney and J A Vastano ldquoDeter-mining Lyapunov exponents from a time seriesrdquo Physica DNonlinear Phenomena vol 16 no 3 pp 285ndash317 1985
[43] J B Dingwell and L C Marin ldquoKinematic variability andlocal dynamic stability of upper body motions when walkingat different speedsrdquo Journal of Biomechanics vol 39 no 3 pp444ndash452 2006
[44] M T Rosenstein J J Collins and C J De Luca ldquoA practicalmethod for calculating largest Lyapunov exponents from smalldata setsrdquo Physica D Nonlinear Phenomena vol 65 no 1-2 pp117ndash134 1993
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of