Embed Size (px)
Citation preview
Multivariable Control
Lecture 01
Introduction
John T. Wen
August 29, 2006
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Outline
• Course outline
• An industrial control example
• Review of SISO controller design
Ref: Text Ch. 1 and Ch. 2.
August 29, 2006Copyrighted by John T. Wen Page 1
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Course Objective
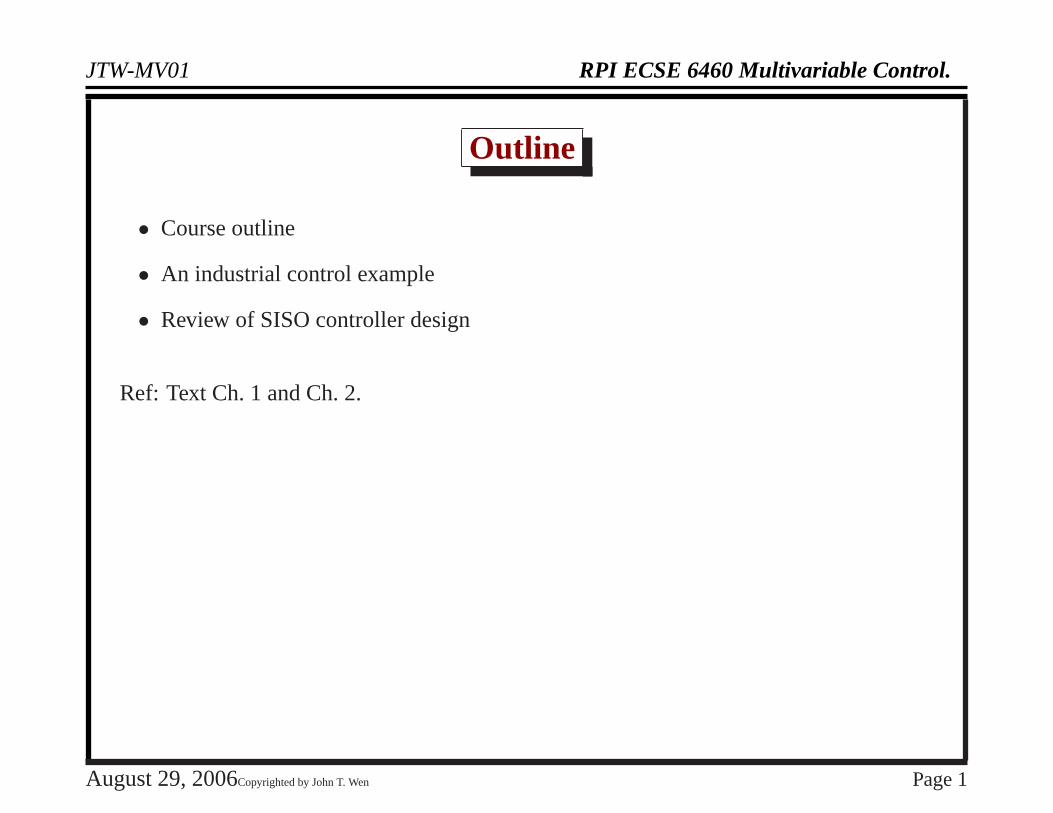
This course covers the tools and methods for theanalysis and synthesisof linear multivari-
ablecontrol systems. The emphasis is on contemporary control systemdesign, connection
betweenfrequency domain and state space methods, systematic consideration ofmodel
uncertainty and closed loop performance, andconvex analysis and designmethods.
August 29, 2006Copyrighted by John T. Wen Page 2
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Two Types of Problems
Analysis: Given a controller, determine if desired properties are satisfiedin the presence
of admissible noises, disturbances, and model uncertainties.
Synthesis: Design a controller so that the desired properties are satisfied.
Other considerations: mechanical design and sensor/actuator selection/placement to make
control problem easier: see inverted pendulum video.
August 29, 2006Copyrighted by John T. Wen Page 3
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Format
• Lectures (T/F 8:30-9:50, W used for make-up classes only)
• In-class activities and Homework (15%)
• Exam (30%, 35%)
• Project (20%)
Knowledge of MATLAB (>7.0) is expected! We will use the MATLABrobust control
toolbox extensively.
Send me an email to get on thecourse mailing list (you’ll need to use your RCS ID and
password to log in).
August 29, 2006Copyrighted by John T. Wen Page 4
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Text
Essentials of Robust Controlby Kemin Zhou (with John C. Doyle)
On the web: J.C. Doyle, B.A. Francis, A.R.Tannenbaum,Feedback Control Theory,
Macmillan, 1992. (Nice introduction ofH∞ design for SISO systems).
Additional references on reserve in library.
August 29, 2006Copyrighted by John T. Wen Page 5
JTW-MV01 RPI ECSE 6460 Multivariable Control.
What is Multivariable Control?
Multivariable control considers feedback control systems with multiple input and output
variables (multi-input/multi-output, or MIMO, systems).
More broadly, multivariable control means systematically addressing modeling, uncer-
tainty, performance in control system design.
– Classical Control(frequency domain techniques): Feedback amplifier (Black ’27),
Nyquist criterion (Nyquist ’32), Bode integral formula, gain/phasemargin (Bode
’38), Servomechanism (Hazen ’34, James, Nichols, Phillips ’47)
– Modern Control(state space methods): Stochastic control (Wiener ’49), Nonlinear
control (Popov ’61), Optimal control (Bellman ’57, Pontryagin ’58, Kalman ’60),
Stability theory (Kalman ’60), Geometric approach (Wonham ’79)
– Robust Control(combination of frequency domain and state space):H∞ Optimization
(Zames ’81), Robustness of MIMO systems, Robust performance,µSynthesis (Doyle
’82), Convex programming approach with linear matrix inequality (LMI) (Boyd ’91)
August 29, 2006Copyrighted by John T. Wen Page 6
JTW-MV01 RPI ECSE 6460 Multivariable Control.
What You Might Have Learned So Far
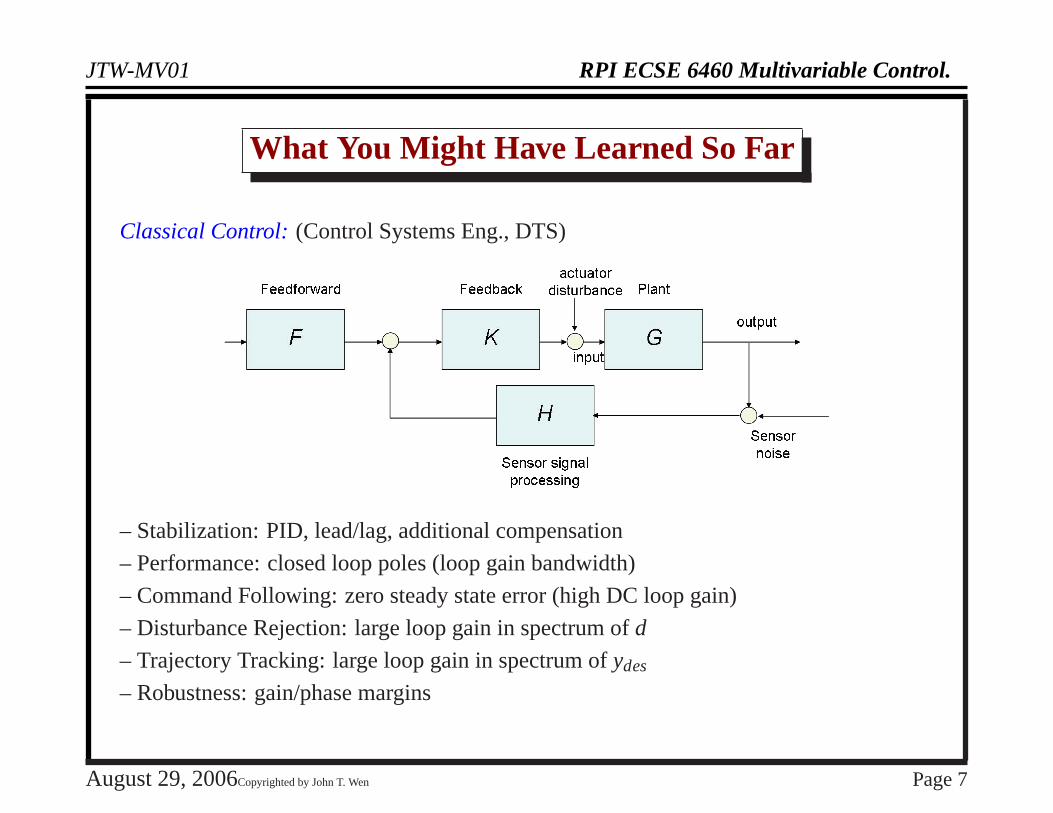
Classical Control:(Control Systems Eng., DTS)
– Stabilization: PID, lead/lag, additional compensation
– Performance: closed loop poles (loop gain bandwidth)
– Command Following: zero steady state error (high DC loop gain)
– Disturbance Rejection: large loop gain in spectrum ofd
– Trajectory Tracking: large loop gain in spectrum ofydes
– Robustness: gain/phase margins
August 29, 2006Copyrighted by John T. Wen Page 7
JTW-MV01 RPI ECSE 6460 Multivariable Control.
What You Might Have Learned So Far (Cont.)
Modern Control(SAT, Optimal Control)
x = Ax+Bu, y = Cx+Du
– Stabilization: Observer based control (observer + full state feedback with either pole
placement or LQR)
– Performance: quadratic optimization index
– Command Following: Integral control
– Disturbance Rejection: ??
– Robustness: ??
August 29, 2006Copyrighted by John T. Wen Page 8
JTW-MV01 RPI ECSE 6460 Multivariable Control.
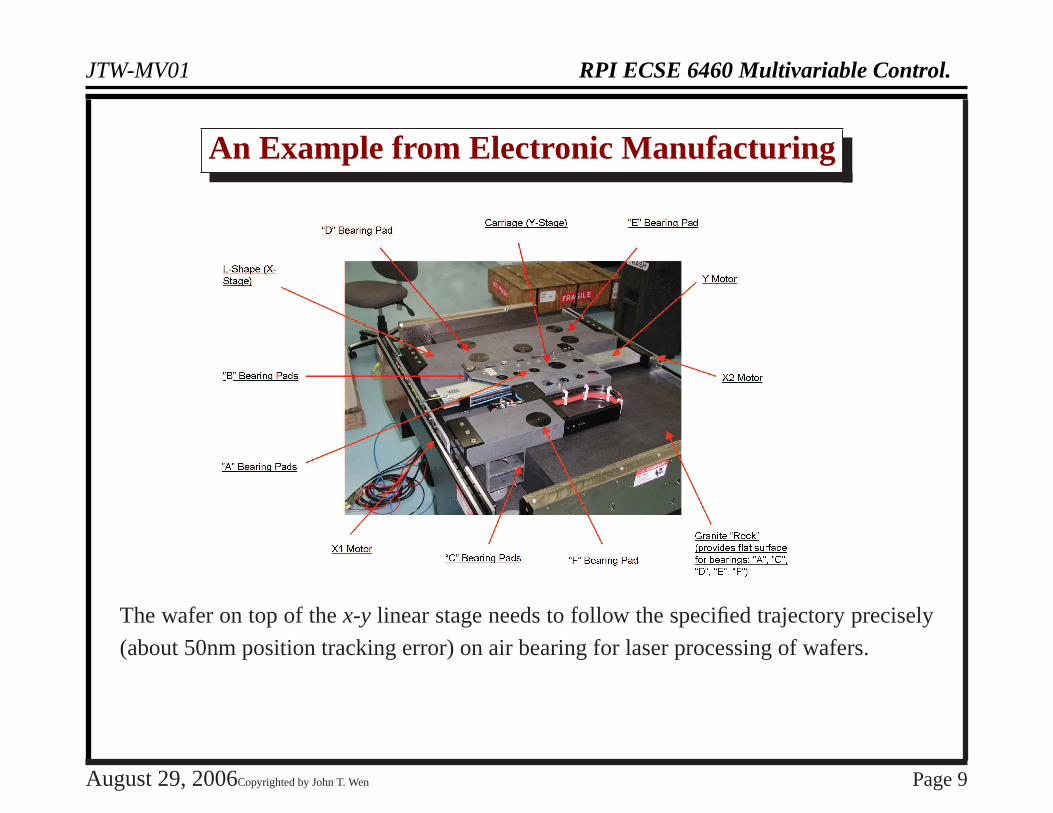
An Example from Electronic Manufacturing
The wafer on top of thex-y linear stage needs to follow the specified trajectory precisely
(about 50nm position tracking error) on air bearing for laser processing of wafers.
August 29, 2006Copyrighted by John T. Wen Page 9
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Example (Cont.)
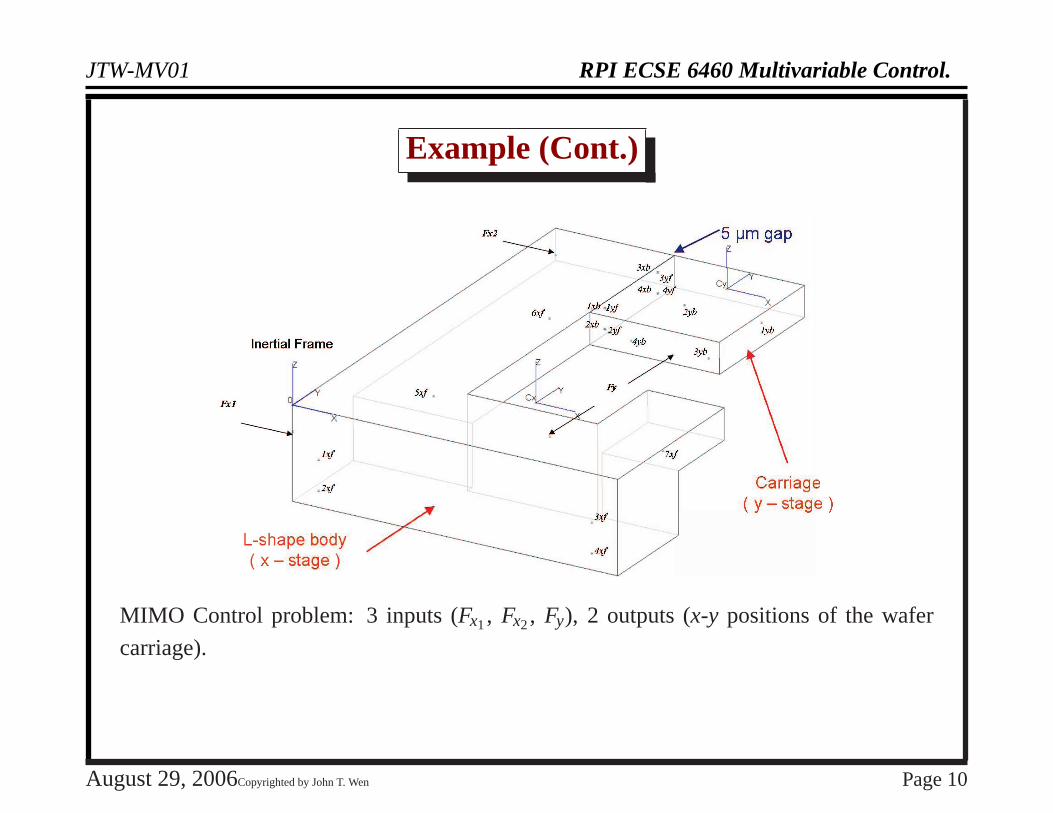
MIMO Control problem: 3 inputs (Fx1, Fx2, Fy), 2 outputs (x-y positions of the wafer
carriage).
August 29, 2006Copyrighted by John T. Wen Page 10
JTW-MV01 RPI ECSE 6460 Multivariable Control.
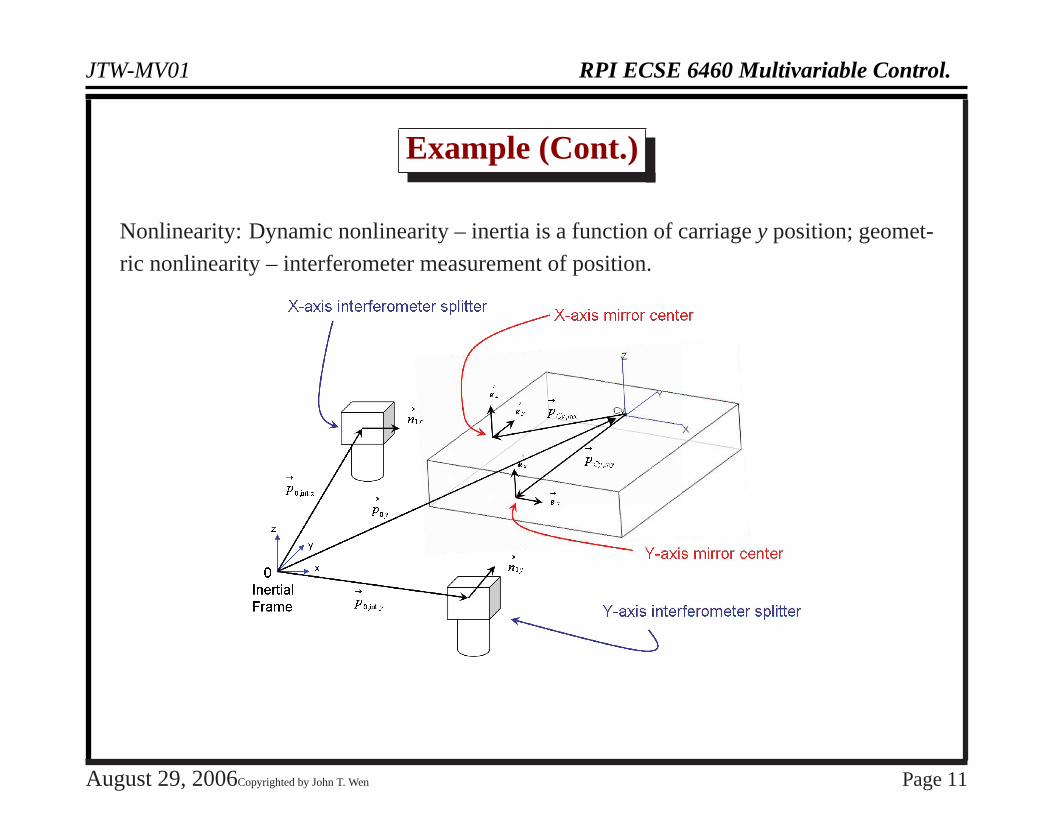
Example (Cont.)
Nonlinearity: Dynamic nonlinearity – inertia is a function of carriagey position; geomet-
ric nonlinearity – interferometer measurement of position.
August 29, 2006Copyrighted by John T. Wen Page 11
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Example (Cont.)
SISO approach:
• Combine the twoFxi inputs into a singleFx (with moment arms used as weightings).
• Treat the system as two decoupled SISO systems (Fx to x interferometer output,Fy to
y interferometer output) with nonlinearities as model uncertainties.
• Tune SISO controller to achieve certain robustness margins (gain/phase margins).
What about the model?
There is no analytic model, just small input amplitude frequency responses at selected
operating points.
August 29, 2006Copyrighted by John T. Wen Page 12
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Multivariable Approach
• Develop a MIMO LTI design model through either
– analytic modeling with measured or identified model parameters, and then lin-
earize about operating point;
– model identification from measured time or frequency domain data collected at
operating point.
• Characterize model uncertainty: parametric (model parameter uncertainty) vs. non-
parametric (frequency response uncertainty)
• Translate control objectives (trajectory following, disturbancerejection) to perfor-
mance metrics. Select (frequency dependent) weightings for the metrics.
• Design controller to achieve stability while minimizing weighting performance met-
rics in the presence of model uncertainty.
• Test controller on the nonlinear model (or evaluate robustnesson the experimental
frequency responses) and then the actual system.
• Iterate (adjust model, re-tune weightings).
August 29, 2006Copyrighted by John T. Wen Page 13
JTW-MV01 RPI ECSE 6460 Multivariable Control.
Before Next Class
• Send me an email to get on the course mailing list. Please tell me a bit of your
background (Master or Ph.D., Department, research area, preparation so far, etc.)
• Check out the course web site.
• Read Chapters 1 and 2.
• Start on Homework #1.
August 29, 2006Copyrighted by John T. Wen Page 14