Embed Size (px)
Citation preview

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS
Dr. Raghvendra. D. Kulkarni
Dr. S.G. Hiremath
Dr. Ibrahim Patel
Dr. Babu Suryawanshi

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
airo
© 2019, AIRO PUBLICATIONS
First Edition: 2019
ISBN: 978-93-88136-20-4
Price: 250/-
Published by: Airo Publications, Gwalior. Phone: 0751- 4218441,
e-mail: [email protected] Website www.airopublication.com
This book or part thereof cannot be translated or reproduced in any form without the written permission of the authors and the publisher

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
PREFACE & ACKNOWLEDGEMENT
Microprocessor & Controller is beyond the reach of average
or par below average student but fact of the matter is that every
student will enjoy the intelligent device working and application if
concepts are made clear to him.
This book is launched keeping in view the difficulty the student
faces in understanding the concepts and an attempt is made here to
present the concepts in a way the student understands it better.
The language is simple. The illustrations are added to make
the concepts even more clear and literature from Introduction to the
end of the book will be knowledgeable to the students.
Since this is the first edition suggestions for further
improvement in the text would be warmly welcomed.
We as authors acknowledge every work and all concerned in
this field.
Dr. Raghvendra. D. Kulkarni
Dr. S.G. Hiremath
Dr. Ibrahim Patel
Dr. Babu Suryawanshi

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
CONTENTS
CHAPTER 1: 8085 HARDWARE DESCRIPTION AND CONCEPTS 1
1.1 FEATURES OF 8085 2
1.2 SAMPLE INTRIGUING QUESTIONS 3
1.3 ARCHITECTURE OF 8085 5
1.4 SAMPLE INTRIGUING QUESTIONS 8
1.5 8085 PIN DIAGRAM 9
1.6 SAMPLE INTRIGUING QUESTIONS 13
1.7 MEMORY INTERFACING 15
1.8 SAMPLE INTRIGUING QUESTIONS 16
1.9 INTERRUPTS 18
1.10 SAMPLE INTRIGUING QUESTIONS 20
CHAPTER 2: PROGRAMMING 8085 MICROPROCESSOR 24
2.1 INSTRUCTION FORMAT 24
2.2 8085 ADDRESSING MODES 26
2.3 INSTRUCTION SET OF 8085 28
2.4 SAMPLE INTRIGUING QUESTIONS & PROGRAMS 34
CHAPTER 3: INTERFACING 46
3.1 8255 PPI 46
3.2 PIN DIAGRAM OF 8255 48
3.3 OPERATIONAL MODES OF 8255 50
3.4 CONTROL WORD FORMAT 51
3.5 SAMPLE INTERFACING EXAMPLES 52

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
CHAPTER 4: 8086 HARDWARE DESCRIPTION AND CONCEPTS 56
4.1 8086 FEATURES 56
4.2 8086 ARCHITECTURE 57
4.3 8086 HARDWARE PIN DIAGRAM 69
CHAPTER 5: 8086 SOFTWARE DESCRIPTION AND CONCEPTS 76
5.1 INSTRUCTION SET 76
5.2 8086 ADDRESSING MODES 94
CHAPTER 6: PROGRAMMING 8086 97
6.1 PROGRAMMING STEPS 97
6.2 ASSEMBLER DIRECTIVES 97
6.3 SUBROUTINES AND MICROS 100
6.4 BIOS AND DOS INTERRUPTS 102
CHAPTER 7: PROGRAMMING WITHIN 8086- EXAMPLES 105
7.1 CONCEPTS 105
7.2 WORKED EXAMPLES ON 8086 109
7.3 SAMPLE INTRIGUING QUESTIONS 170
CHAPTER 8: 8051 HARDWARE DESCRIPTION AND CONCEPTS 177
8.1 8051 FEATURES 177
8.2 8051 ARCHITECTURE 178
8.3 8051 REGISTER ARCHITECTURE 180
8.4 8051 HARDWARE PIN DIAGRAM 185

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
CHAPTER 9: 8051 SOFTWARE DESCRIPTION AND CONCEPTS 188
9.1 8051 INSTRUCTION SET 188
9.2 ADDRRESSING MODES 194
CHAPTER 10: PROGRAMMING 8051 198
10.1 PROGRAMMING STEPS 198
10.2 ASSEMBLER DIRECTIVES 198
10.3 INTERRUPTS 200
10.4 PROGRAMMING CONCEPTS 201
10.5 PROGRAMMING EXAMPLES 202
10.6 OBJECTIVE WORKED EXAMPLES 215
CHAPTER 11: BASIC SOFTWARES 217
11.1 8086 MASM 217
11.2 EMULATOR 219
11.3 8051-KEIL SOFTWARE 222
INDEX 231
*****

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
1
CHAPTER 1
8085 HARDWARE DESCRIPTION AND CONCEPTS
Microprocessor is seen as a man made human brain which
intelligently and logically follows human instructions. The decision
making capability of the microprocessor incorporates control unit,
arithmetic logic unit, memory, data storage and its manipulation,
transmission of information, time sharing, multiprocessing and parallel
processing. Microprocessors are designed as per the data sizes and speed
and this aspect is changing day by day with increase in volume of data and
change in processing speed accordingly.
Microprocessor is the central processing unit (CPU) of a micro-
computer, integrated on a very small chip performing arithmetic & logical
operations and interface with external devices. The microprocessors and
microcontrollers are said to be cost effective, of small size, versatile and
reliable.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
2
Microprocessor works on the basis of fetch (get the information),
decode and execute. The information can be seen stored either in registers,
memory and input/output devices hence there will read and write
operations pertaining to memory or input/output devices. Once the data is
fetched it will be decoded i.e. it will made in the language the system
understands and the information will be outputted or executed. Following
topic and subtopic covers 8085 microprocessor basics and concepts of
programming.
1.1 FEATURES OF 8085
1 8085 is supplied in a 40-pin DIP NMOS package having
Von Neumann design produced by Intel in 1976.
2. Works on +5V voltage supply at 3.2 MHz clock.
3 The data length is 8-bit and hence all registers are 8-bit wide.
4 The address length is 16-bit and memory addressing capacity is
64K.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
3
5 It has 8-bit registers viz. A, B, C, D, E, H & L among them B, C,
D, E, H & L are used as register pairs BC, DE & HL for 16-bit data
operations.
6 It has 16-bit program counter.
7 It has 16-bit stack pointer.
8 The status of the arithmetic, logical and branch instructions are
determined by 8-bit flag registers which are classified into sign,
zero, auxiliary carry, parity and carry.
9 It has 8224 on chip clock and 8228 control signal generators.
10 It supports three maskable vectored interrupts viz. RST 7.5, RST
6.5 and RST 5.5, one non-maskable interrupt (TRAP), and one
external service interrupt (INTR).
11 The programming model includes 74 instructions which can be
used for data transfer, arithmetic, logical and branch operations.
1.2 Sample Intriguing Questions
1) What is memory map and give the memory map of 8085?
Ans: 8085 has 16-bit address line and it can address 2^16= 65,536
memory locations. Each location holds a byte of information. The

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
4
starting address is 0000H and the ending address is FFFFH. The
range of memory address 0000H-FFFFH is referred to as memory
map.
2) Why Program counter is 16-bit?
Ans: The program counter points towards the address of next instruction
in the program and instructions are stored in program memory and
all memory related operations are 16-bit and hence program
counter is 16-bit wide.
3) What is the largest number handled by 8085?
Ans: The data lines are of 8-bit i.e. 2^8=256 (OOH-FFH) and hence the
largest data handled by 8085 is 11111111 (FFH or 255 in decimal).
4) What is significance of Von Neumann architecture?
Ans: The significance is that same memory can be used for both data and
program.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
5
5) Microprocessor is meant to carry basic arithmetic and logical
operation but, how come it carries out complex mathematical
operations?
Ans: The microprocessor is having co-processors such as 8087 which is
responsible to carry out complex mathematical operations.
1.3 ARCHITECTURE OF 8085
The architecture and its building blocks viz. Control Unit, Arithmetic and
Logic Unit and Registers are explained in the following paras:
Address/Data Lines:
8085 has 8-bit data line which are bidirectional and data handling capacity
is 2^8=256 (00H-FFH). The address lines are 16-bit and the total number
of address lines are accounted to 2^16=65,536 (64K) that means it has
64K addresses and the map is 0000H-FFFFH.
Control Unit
Produces timing signals for internal and external operations such as
memory input/output read/write.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
6
Figure 1.1: 8085 Architecture
Arithmetic and Logical Unit (ALU)
Performs all arithmetic and logical operations within the processor such
as addition, subtraction, multiplication, division, logical AND, OR, etc.
Registers
It has six 8-bit general purpose registers B, C, D, E, H, and L and these
can be paired into BC, DE and HL for 16-bit operations.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
7
Accumulator
Accumulator register A can also be considered as a general purpose
register and predominantly finds application in arithmetic, logical and
input/output operations.
Flag Register (Flip- Flops)
Flag register is an 8-bit register incorporated into ALU. Flags are set or
reset after an arithmetic or logical operation. The flags are Zero (Z), Carry
(CY), Sign (S), Parity (P), and Auxiliary Carry (AC). The Zero (Z) and
Carry (CY) flag are found application in normal arithmetic operations
whereas Auxiliary Carry (AC) flag is used with respect to BCD
operations. The Sign (S) and Parity (P) flags can be used for singed
arithmetic and logical operations.
Program Counter (PC)
It is a 16-bit register which always points towards the location of next
instruction. The starting address pointed by it will be 0000H and ending
address pointed by it will be FFFFH. All in all, it points to 2^16= 65,565
locations.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
8
Stack Pointer (SP)
Stack is an additional memory used for temporary storage and the pointer
for this memory is a 16-bit register called as stack pointer (SP) and its
principle of operation is last in first out (LIFO).
Instruction Register/Decoder
Stores the fetched instruction from memory and decoder decodes it and
control signals are issued accordingly.
Memory Address Register
Holds address of the next instruction from program counter (PC).
1.4 Sample Intriguing Questions
1) Define 1K byte memory?
Ans: 1K =1024. Thus, the 1K memory has 1024 registers with starting
& ending addresses of 0000H-03FFH. Each address or register
holds 8-bit of information.
2) Elaborate on processor and memory interfacing?
Ans: The speed of microprocessor and memory is considered as same
and hence no external devices are required for interfacing whereas
for outside devices an interfacing device such as 8255 is required

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
9
since compatibility and speed differ.
3) Why crystal oscillator is used in 8085 clock generation?
Ans: Crystal is assumed to be generating fixed frequency and it has
high stability.
1.5 8085 PIN DIAGRAM
Figure 1.2: Pin Diagram of 8085

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
10
A8 - A15
High Order Address Bus: These 8 lines are unidirectional high order
address buses.
AD0 - AD7
These are bidirectional multiplexed Address and Data Bus. During T1
memory cycle the lines are used as low-order address bus and then are
used as data lines. They can be separated by using a latch and ALE signal.
ALE
Address Latch Enable: When the signal goes high, low order address bus
is separated from de-multiplexed bus using a latch.
S0 & S1 Status Signals
The following combination of bits gives out appropriate control signals.
S0 S1 OPERATION
0 0 HLT
0 1 WRITE
1 0 READ
1 1 FETCH

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
11
RD
READ: When this signal goes low, the processor either reads from the
memory or input/output device.
WR
WRITE: When this signal goes low, the processor either writes into the
memory or input/output device.
Ready
When this signal goes high the processor assumes that the peripheral
device is ready for communication else the processor goes into the wait
state.
HOLD
HOLD: The high signal indicates that DMA controller is requesting for
the use of address and data buses.
HLDA
HOLD ACKNOWLEDGE: High signal indicates that the processor
accepts the hold signal issued by the peripheral.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
12
INTR
The high signal indicates that a device is interrupting and asking for a
service, the priority is determined by the processor after acknowledging
the request.
RESTART INTERRUPTS
These three inputs (RST 7.5, RST 6.5 and RST 5.5) have the same timing
as INTR with the exception that they cause an inner RESTART having
RST 7.5 Highest Priority and RST 5.5 Lowest Priority
TRAP
It is a non maskable with highest priority.
RESET IN
When the signal goes low the processor is reset and Program Counter
becomes zero.
RESET OUT
High signal indicates processor being reset and the signal can be used to
reset other connected devices.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
13
X1, X2
Crystal Oscillator input pins. To generate a fixed frequency of 3Mhz, the
crystal frequency must be of 6MHz and the internal divide by 2
mechanism makes the operating frequency of 3 MHz
CLK
Serves as system clock for peripherals.
IO/M
When the signal is high it indicates IO operation and when it is low it
indicates memory operation.
SID/SOD
(Serial Input/ Output Data): Pins are used for serial communication.
1.6 Sample Intriguing Questions
1) When does HOLD and HLDA signals are used?
Ans: These signals are meant for Direct Memory Access (DMA)
operations.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
14
2) Which interrupt is having lowest priority and which one is highest?
Ans: INTR is having lowest priority whereas TRAP has highest priority.
3) When does READY pin is used?
Ans: READY pin is used to check external device readiness.
4) What is the low order and high order registers in 8085?
Ans: Flag register is said to of low order whereas Accumulator register
is having high order since operations are carried out first and then status
through flag is checked.
5) What happens when RESET pin is activated?
Ans: It resets the microprocessor to its initial state wherein the program
counter (PC) is set at 0000H and instruction register (IR) is cleared.
6) Which pin is responsible for microprocessor wait state?
Ans: It is READY pin and if this pin goes low then microprocessor goes
into wait state till READY pin goes high indicating that external device is
ready.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
15
1.7 MEMORY INTERFACING
The memory is comprised of semiconductor material used to store the
information. The nature of memory is Processor memory, Primary
memory and Secondary memory. The memory will be having input,
output, address and enable pins. The control signals required for static
RAM are chip select, read and write control signals. The memory size is
always given in m x n where, m denotes number of address lines which
are in terms of 2^x (x is capacity of memory storing in bits) and n denotes
number of data lines. The data lines are fixed as per the data handling
capacity of the microprocessor under question. Decoders are used for chip
select logic. Predominant decoder which is used is 74LSI138. The read
write and read only memory (EPROM) is schematically shown below. As
can be seen the read/write memory is having both read (RD) pin and write
(WR) pin whereas EPROM has only read (rd) pin. Both the memory chips
are having chip select pin for their selection.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
16
Figure 1.3: Memory chip representation
1.8 Sample Intriguing Questions
1) What is refreshing indicates?
Ans: Refreshing indicate that the memory segment has DRAM which is
required to be refreshed periodically for loss of information.
2) Where does passwords are generally stored?
Ans: Passwords are generally stored in EEPROM memory.
3) Which memory is generally known as cache memory?
Ans: SRAM memory is generally known as cache memory.
4) What 1K X 8 indicates with respect to memory interfacing?
Ans: 1K X 8 = 1024 X 8 =2^10 X 8 which indicates that the memory chip has
10 address lines and 8 data lines and 1024 registers as locations and each
location or register stores 8 bit of data.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
17
5) Give out memory address range for 1K memory?
Ans: 1K = 2^10, which indicates that it is having 10 address lines A0-A9
and rest A0-A15 are used for chip select logic. The address range
can be mapped as:
A15 A14 A13 A12 A11 A10 A9 A8 A7 A6 A5 A4 A3 A2 A1 A0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 --0000H
0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 --03FFH
The memory address ranges from 0000H to 03FFH. The lines A0 - A9 are
given to address lines whereas A10 - A15 are given to chip select pin and
they never change i.e. if level is 0 the said pins will be maintained at 0 and
if they are at 1, they are maintained at 1.
6) What are the fields indicate in 74LSI38 decoder?
Ans: In 74LSI38, 74 is the IC series, LSI is large scale integration and
38 indicates 3 input lines and 8 output lines.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
18
1.9 INTERRUPTS
Interrupt is an event asking the processor to perform a specific operation
and utilized for processor and peripheral information exchange. Once the
interrupt signal is activated the processor executes interrupt service routine
(ISR) program and after that returns to main program. The interrupt can
be of hardware and software. 8085 has eight software interrupts; RST 0 to
RST 7, the address space for each interrupt is 8 spaces as shown:
Interrupt Vector Address
RST 0 0000H
RST 1 0008H
RST 2 0010H
RST 3 0018H
RST 4 0020H
RST 5 0028H
RST 6 0030H
RST 7 0038H
Hardware interrupts
The 8085 has five hardware interrupts viz.
(1) TRAP (2) RST 7.5 (3) RST 6.5 (4) RST 5.5 (5) INTR

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
19
(1) TRAP:
It is a non-maskable interrupt with highest priority. When it is by enabled
by getting acknowledged, it executes as ISR and sends the data to backup
memory. Its address is 0024H.
(2) RST 7.5:
It is maskable having location 003CH. It is having the second highest
priority among all interrupts. When this interrupt is executed, the
processor saves the content of the PC register on to the stack.
(3) RST 6.5
It is a maskable interrupt, having the third highest priority with address
0034H. When it is executed, the processor saves the content of the PC
register on to the stack.
(4) RST 5.5
It is a maskable interrupt with address 002CH When this interrupt is
executed, the processor saves the content of the PC register on to the stack.
(5) INTR:
INTR is a maskable interrupt with lowest priority. When it is enabled and
acknowledged, the microprocessor executes the instruction under process
and stores the address of next instruction on to the stack and serves the

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
20
interrupt service routine (ISR) and then returns to main program by
retrieving the address of stored instruction from stack.
1.10 Sample Intriguing Questions
1) Explain the sequence of events when main program is interrupted.
Ans: When microprocessor receives any interrupt signal from
peripheral(s) which are requesting its services, it stops its current
execution by executing the instruction under process and stores the
address of next instruction on the stack then sends an
acknowledgement (INTA) to the peripheral which is requesting for
its service.
The processor serves the interrupt service routine by transferring
the program control by generating CALL signal and after
executing sub-routine by generating RET signal again program
control is transferred to main program from where it had stopped.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
21
2) How are interrupts are enabled and disabled in 8085.
Ans: There are instructions in 8085 which are used to set and reset the
interrupts of 8085 and the instructions are:
Enable Interrupt (EI): - The interrupt enable flip-flop is set and
all interrupts are enabled following the execution of next
instruction followed by EI. No flags are affected. After a system
reset, the interrupt enable flip-flop is reset, thus disabling the
interrupts. This instruction is necessary to enable the interrupts
again (except TRAP).
Disable Interrupt (DI): - This instruction is used to reset the value
of enable flip-flop hence disabling all the interrupts. No flags are
affected by this instruction.
Set Interrupt Mask (SIM): - It is used to implement the hardware
interrupts (RST 7.5, RST 6.5, RST 5.5) by setting various bits to
form masks or generate output data via the Serial Output Data
(SOD) line. First the required value is loaded in accumulator then
SIM will take the bit pattern from it.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
22
Read Interrupt Mask (RIM): - This instruction is used to read the
status of the hardware interrupts (RST 7.5, RST 6.5, RST 5.5) by
loading into the A register a byte which defines the condition of the
mask bits for the interrupts. It also reads the condition of SID
(Serial Input Data) bit on the microprocessor.
3) What are SOD and SID lines do in 8085.
Ans: These pins or signals are used for serial communication.
SID (Serial input data line): It is an input line through which the
microprocessor accepts serial data.
SOD (Serial output data line): It is an output line through which
the microprocessor sends output serial data.
4) What is the significance of MSE bit in 8085 SIM format.
Ans: Mask Set Enable (MSE): - Accumulator is loaded with required
data which decides the action to be taken before SIM instruction is
executed.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
23
X is a don't care bit, the other bits of the accumulator decide the effect of
executing masking or unmasking of interrupts.
5) Show interrupt event by flow chart?
Ans: The flow chart is shown below and is self understandable.
Figure 1.4: Flow Diagram for Interrupt Event

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
24
CHAPTER 2
PROGRAMMING 8085 MICROPROCESSOR
2.1 INSTRUCTION FORMAT
Instruction is an assignment to the machine on a predetermined
information. Every Instruction has opcode (operational code) and operand
(data to be operated upon). The operand (data or information) may be
within the instruction, given directly in the instruction, may be in the
memory or in a register. The data can be of 8-bit or 16-bit.
8085 Instruction word size
The 8085 word sizes are:
1. One-word or 1-byte
2. Two-word or 2-byte
3. Three-word or 3-byte
The data sizes with respect to 8085 are, 4- bit “nibble”, 8- bit “byte” and
16- bit "word"

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
25
One-Byte Instructions
In 1-byte opcode and operand are incorporated into the same byte.
Ex: ADD A 87H Opcode is ADD & Operand is A
DAA 27H Opcode is DAA & Operand is A
Two-Byte Instructions
In a two-byte, the first byte is opcode and the second byte is an 8- bit data.
Ex: MVI A, 44H 3EH Opcode 3E & Operand is 8-bit data
ANI 44H E6H Opcode E6H & Operand is 8-bit data
Three-Byte Instructions
In a three-byte the first byte is the opcode, and the accompanying two
bytes indicate the 16-bit data/ address.
Ex: LXI H, 16-BIT 21H Opcode is 21 & Operand is 16-bit data
LXI B, 16-BIT 01H Opcode is 01 & Operand is16-bit data
JNC 16-BIT D2H Opcode is D2 & Operand is 16-bit data

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
26
2.2 8085 ADDRESSING MODES
Methods of accessing the data are the addressing modes and for 8085, the
modes are:
1 Implicit
2 Immediate
3 Register
4 Direct
5 Indirect.
Implicit Addressing mode
In this mode the data is within the instruction itself.
Ex: AAA
DAA
CMC
Immediate Addressing mode
In this mode the data is given directly in the instruction itself.
Ex: MVI A, 44H
IN 44H
XRI 00H
ORI 00H
ANI FFH

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
27
Register Addressing mode
In this mode the information is given through the registers.
Ex: MOV Rd, Rs
The data may be in the memory which can be accessed directly or
indirectly.
Direct Addressing mode
Memory address is given directly in the instruction where the data is stored
or can be sent.
Ex: IN 00H
OUT 01H
LXI H, 4500H
LDA 4500H
Indirect Addressing mode
The information is indirectly specified in the instruction by the register pair.
Ex: MOV R, M
The location of data is specified by the HL register pair.
LDAX D
The contents of the memory location are specified by DE register pair.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
28
2.3 INSTRUCTION SET OF 8085
An instruction is a parallel function planned inside a microchip to perform
a particular function. The whole group of guidelines, called as the
instruction set, figures out what works the microchip can perform. These
instructions can be characterized into the accompanying five processing
classes: information exchange (data transfer) operations, mathematical
operations, logical operations, program branching operations, and
machine-control operations.
Data Transfer Group
Transfer of data between register to memory, memory to register, register
to memory. No memory to memory data transfer. For transfer data sizes
must be same.
MOV Move
MVI Move Immediate
LDA Load Accumulator Directly from Memory
STA Store Accumulator Directly in Memory

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
29
LHLD Load H and L Registers Directly from Memory
SHLD Store H and L Registers Directly in Memory
LXI Load Register Pair with Immediate information
LDAX Load Accumulator from Address in Register Pair
STAX Store Accumulator in Address in Register Pair
XCHG Exchange H and L with D and E
XTHL Exchange Top of Stack with H and L
Here "X" 16-bits.
Arithmetic Group
The number of operations include, addition, subtraction, multiplication,
division, increment or decrement. Information assumed to be either in
registers or memory. In arithmetic operation result always stored in
accumulator.
ADD Add to Accumulator
ADI Add Immediate Data to Accumulator

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
30
ADC Add to Accumulator Using Carry Flag
ACI Add Immediate information to Accumulator Using carry
SUB Subtract from Accumulator
SUI Subtract Immediate Data from Accumulator
SBB Subtract from Accumulator Using Borrow (C) Flag
SBI Subtract Immediate from Accumulator Using Barrow(C) Flag
INR Increment Specified Byte by One
DCR Decrement Specified Byte by One
INX Increment Register Pair by One
DCX Decrement Register Pair by One
DAD Double Register Add; Add Content of Register
Logical Group
These instructions are with respect to accumulator only.
ANA Logical AND with Accumulator
ANI Logical AND with Accumulator Using Immediate Data

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
31
ORA Logical OR with Accumulator
OR Logical OR with Accumulator Using Immediate data
XRA Exclusive Logical OR with Accumulator
XRI Exclusive OR Using Immediate Data
CMP Compare
CPI Compare Using Immediate Data
RLC Rotate Accumulator Left
RRC Rotate Accumulator Right
RAL Rotate Left Through Carry
RAR Rotate Right Through Carry
CMA Complement Accumulator
CMC Complement Carry Flag
STC Set Carry Flag

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
32
Branch Group
Unconditional Jump
JMP Jump
Conditional Jump
JNZ Not Zero (Z =0)
JZ Zero (Z = 1)
JNC No Carry (C =0)
JC Carry (C = 1)
JPO Parity Odd (P = 0)
JPE Parity Even (P = 1)
JP Plus (S = 0)
JM Minus (S = 1)
JC JCC JRC (Carry)
INC CNC RNC (No Carry)
JZ CZ RZ (Zero)
JNZ CNZ RNZ (Not Zero)
JP CP RP (Plus)

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
33
JM CM RM (Minus)
JPE CPE RPE (Parity Even)
JP0 CPO RPO (Parity Odd)
Call & Return Instructions
CALL Call
RET Return
Stack Instructions
PUSH Push Two bytes of Data onto the Stack
POP Pop Two Bytes of Data off the Stack
XTHL Exchange Top of Stack with H and L
SPHL Move substance of H and L to Stack Pointer
PCHL Move H and L to Program Counter
RST Special Restart Instruction Used with Interrupts
Input/ Output
IN Initiate Input Operation
OUT Initiate Output Operation

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
34
Machine Control Instructions
EI Enable Interrupt System
DI Disable Interrupt System
HLT Halt
NOP No Operation
2.4 Sample Intriguing Questions and Programs
1) Explain the classification of 8085 instruction based on word size
Give examples.
Ans: 8085 instructions are classified with respect to word size into
1-byte, 2-byte and 3-byte instructions. In 1-byte opcode and
operand are incorporated into the same byte. In a two-byte, the first
byte is opcode and the second byte is an 8-bit data/address and in a
three-byte the first byte is the opcode, and the accompanying two
bytes indicate the 16-bit data/ address.
The examples are:
1-byte: AAA, DAA, CMC
2-byte: MVI A, 22H, MOV D, 12H, ANI A, 00H
3-byte: LXI H, 2222H, LHLD 2222H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
35
2) Elaborate the difference between XCHG and XTHL.
Ans: XCHG instruction exchanges data between HL and DE pair, data
in H is exchanged with D and data in L is exchanged with E register
respectively.
XTHL exchanges HL register contents with top of the stack.
Contents of L register are exchanged with stack content pointed by
stack pointer register (SP) and contents of H register are exchanged
with next stack location (SP+1).
3) What are the two instructions used for setting and resetting data
bits.
Ans: OR logic is used to set the bits whereas AND logic is used for
resetting the bits, these operations are strictly with respect to
accumulator A only.
4) Which instruction finds application in forming 2’complement.
Ans: NEG instruction is used to get 2’complement of a number and it is
with respect to accumulator A register only.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
36
5) Write a program to add two 8-bit data by using registers and then
memory.
Ans: By using registers
MVI A, 8-Bit
MVI B, 8-Bit
ADD A, B
HLT
By using Memory
LXI H, 8500H first data in memory 8500
MOV A, M move first data into A
INX H next 8-bit data in 8501
ADD M Add the two datas
INX H
MOV M, A store the result in 8502

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
37
6) Write a program to exchange content of two memory locations.
Ans: LXI H, XXXXH
LXI D, YYYYH
MOV B, M
LDAX D
MOV M, A
XCHG
MOV M, B
HLT
7) Write a program to find 2’ complement of a number.
Ans: LDA XXXXH
CMA
INR A
HLT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
38
8) Write a program to count number of 1’s.
Ans: LDA XXXXH
MVI C, 0
MVI B, 8
L1: RLC
JNC L2
INC C
L2: DCR B
JNZ L1
HLT
9) Write a program to check whether a number is even or odd.
Ans: LDA XXXXH
RRC

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
39
JC ODD
EVEN: MVI A, 0
JMP STORE
ODD: MVI A, FFH
STORE: STA YYYYH
HLT
10) Write a program to find whether a number is positive or negative.
Ans: LDA XXXXH
RLC
JC -VE
+VE: MVI A, 0
JMP STORE
-VE: MVI A, FFH
STORE: STA YYYYH
HLT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
40
11) Write a program to add 2 BCD numbers.
Ans: LXI H, XXXXH
MOV A, M
INX H
ADD M
DAA
HLT
12) Modify the above program for 10 decimal numbers ignoring
overflow.
Ans: LXI H, XXXXH /numbers in location
MOV A, M
MOV C, 10 /count for 10 numbers.
ADD: INX H
ADD M
DAA
DCR C
JNZ ADD
HLT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
41
13) Write a program to convert BCD number to binary.
Ans: LDA XXXXH
MOV B, A
ANI OFH
MOV C, A
MOV A, B
ANI 0F0H
RRC
RRC
RRC
RRC
MOV B, A
CALL BCD TO BIN
ADD C
HLT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
42
BCD TO BIN: XRA A
ADD: ADI 0AH
DCR B
JNZ ADD
RET
14) Write a program to convert Hexadecimal to ASCII.
Ans: LDA XX00H
MOV B, A
ANI 0FH
CALL HEX TO ASCII
STA XX01H
MOV A, B
ANI 0F0H
RLC
RLC

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
43
RLC
RLC
CALL HEX TO ASCII
STA XX02H
HLT
HEX TO ASCII: CPI 0AH
JC L1
ADI 07
L1: ADI 30
RET
15) Write a program to arrange the numbers in ascending order.
Ans: LXI H, XXXXH
MOV C, M
DCR C
START: MOV D, C
LXI H, YYYYH
UP: MOV A, M

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
44
INX H
CMP M
JC DOWN
NOV B, M
MOV M, A
DCR H
MOV M, B
INX H
DOWN: DCR D
JNZ UP
DCR C
JNZ START
HLT
16) Write a program to find smallest from an array.
Ans: LXI H, XXXXH
MOV B, M /count in B
INX H /first array element

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
45
MOV A, M
DCR B
LI: INX H /next element
CMP M
JC L2
MOV A, M
L2: DCR B
JNZ L1
STA YYYYH
HLT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
46
CHAPTER 3
INTERFACING
The devices are used for data sharing and in real world the
compatibility and speed problem exists between devices. To overcome
these real world problems intermediate interfacing devices such as 8255
are necessary for data sharing without loss.
3.1 8255 Programmable Peripheral Interface (PPI)
The parallel input-output port chip 8255 is also called as programmable
peripheral interface device. The Intel’s 8255 is designed for use with
Intel’s 8-bit, 16-bit and higher capability microprocessors. It has 24
input/output lines which may be individually programmed in two groups
of twelve lines each, or three groups of eight lines. The two groups of I/O
pins are named as Group A and Group B. Each of these two groups
contains a subgroup of eight I/O lines called as 8-bit port and another
subgroup of four lines or a 4-bit port. Thus, Group A contains an 8-bit port
A along with a 4-bit port. C upper. The port A lines are identified by

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
47
symbols PA0-PA7 while the port C lines are identified as PC4-PC7.
Similarly, Group B contains an 8-bit port B, containing lines PB0-PB7 and
a 4-bit port C with lower bits PC0- PC3. Port C lower can be used in
combination as an 8-bit port C. Both the port C are assigned the same
address. Thus, one may have either three 8-bit I/O ports or two 8-bit and
two 4-bit ports from 8255. All of these ports can function independently
either as input or as output ports.
Figure 3.1: 8255 Architecture

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
48
Operation of 8255 is by programming the bits of an internal register of
8255 called as control word register (CWR). This buffer receives or
transmits data upon the execution of input or output instructions by the
microprocessor. The control words or status information is also transferred
through the buffer.
3.2 PIN DIAGRAM OF 8255
Figure 3.2: Pin diagram 8255

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
49
The pin descriptors are:
• PA7-PA0: Port A 8-bit pins. The functions of this port are defined
by writing control word in control word register.
• PC0-PC7: Serve as 8-bit Control pins and as handshake lines in
mode 1 or mode 2. The functions of this port are defined by writing
control word in control word register.
• PB0-PB7: Port B 8-bit pins. The functions of this port are defined
by writing control word in control word register
• RD: low to show read operation.
• WR: low on this line shows write operation.
• CS: This is a chip select line and connected to decoded address lines
in order to select the appropriate chip.
• A1-A0: These lines along with CS line selects IO ports or control
word register.
• D0-D7: 8-bit data lines.
• RESET: A high line control word register and all ports are set as
input ports.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
50
3.3 OPERATIONAL MODES OF 8255
There are two fundamental operational modes of 8255:
1. Input/output mode
2. Bit set/reset mode (BSR)
Input/ Output Mode
There are three IO modes.
Mode 0
In this mode, the ports can be programmed either as Input or as Output
without handshaking (simple mode) defined by control word register.
Mode 1
Port A and Port B functions as either Input or Output port with handshake
signals from Port C. the functions are defined by control word.
Mode 2
Used for bidirectional data flow. Port A is programmed as bidirectional
port and Port B either in mode 0 or mode 1 with port C pins simple I/O
pins or handshake for port B.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
51
Bit Set/Reset (BSR) mode
BSR mode is applicable only for Port C, wherein Port C bits can be set or
reset as per control word. D7 bit is always set to 1 and bit D0 is either set
or reset.
3.4 CONTROL WORD FORMAT
Input/output mode format
The mode is selected by making bit D7 as 1. The format is shown below:
Figure 3.3: Control Word format for Input / Output Mode

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
52
Bit Set Reset Mode Format
The figure below is the control word format for BSR mode in which bit
D7 is set to 0 laways:
Figure 3.4: Control Word format in BSR mode
3.5 Sample Interfacing Examples
Example 1) Write an ALP for 8-bit Digital to Analog Converter.
Here a processor with appropriate port and control word register
addresses is assumed. An FRC connector is appropriately interfaced with
available D/A converter (DAC 0808) and processor.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
53
assume cs: code
code segment
mov al, control word
out control word register, al
loop1: mov al, 00h
out port c, al
loop2: out port a, al
inr al
nop
nop
nop
nop
nop
nop
nop
nop
cmp al, 0eeh
jz loop1
jmp loop2
hlt
code ends
end

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
54
Output: A ramp waveform can be observed on the CRO and the analog
value can be calculated by using the formula:
V0= Rf/R [D7/2 + D6/4 + D5/8 + D4/16 + D3/32 + D2/64 + D1/128 +
D0/256] Vref.
Rf, R and Vref are appropriately assumed.
Example 2) Write an ALP for stepper motor interface.
assume cs: code
code segment
mov al, control word
out control word register, al
mov al, 0ffh
out port a, al
start: mov al, 05h
out port a, al
call delay
mov al. 06h
out port a, al

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
55
call delay
mov al, 0ah
out port a, al
call delay
mov al, 09h
out port a, al
call delay
jmp start
delay: mov cl, delay count
again: dcr cl
jz exit
jmp again
exit: ret
code ends
end start

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
56
CHAPTER 4
8086 HARDWARE DESCRIPTION AND CONCEPTS
4.1 8086 FEATURES
1. Evolution year 1978.
2. It was the first 16-out bit microprocessor.
3. It is accessible as 40-pin Dual-Inline-Package (DIP).
4. It is accessible in three variants
a. 8086 (5 MHz)
b. 8086-2 (8 MHz)
c. 8086-1 (10 MHz)
5. It has 16 bit data and 20 bit address lines.
6. Total 1 Mb of Memory.
7. Four segments each of 64 K.
8. Pipelined architecture with fetch and execution operations.
9. Instruction queue with 6 instruction bytes storing at any given time
10. 16-bit ALU with 8-bit manipulation possibility.
11. Has 256 vectored interrupts.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
57
4.2 8086 ARCHITECTURE
Figure 4.1: Architecture of 8086
8086 has a register architecture and is divided into two parts viz., Bus
Interface Unit (BIU) and Execution Unit (EU). The BIU fetches the
direction or information from memory and write the information to
memory or input/ output port. It has General Purpose Registers, Pointer
and Index Registers, Flag Registers and Arithmetic and Logic Unit (ALU).

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
58
ALU is of 16-bit hence the size of the microprocessor is 16 bit but, it can
perform 8 bit operations as well. ALU performs arithmetic and logical
operations, like +, −, ×, /, OR, AND, NOT operations. BIU unit calculates
the 20-bit address required for data manipulations. The execution unit
interfaces outside world to the microprocessor and helps to increase
performance by having instruction queue which stores 6 instruction bytes
at a time. The unit holds segment registers along with instruction pointer
which points to the location of the next executable instruction.
The architectural flow can be drawn as follows:

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
59
DATA AND ADDRESS LINES
8086 is a communicative device and used for sharing of information or
data. For sharing of data within or outside the microprocessor it is required
that it should have address and data lines. 8086 has 16-bit data and 20-bit
address lines. 8086 can also be used for 8-bit data operations.
REGISTER ARCHITECTURE
The register architecture of 8086 contains General purpose registers,
Pointer registers, Index registers, Segment registers and Flag register. All
the registers of 8086 are 16-bit registers.
General purpose registers or data registers: AX, BX, CX, and DX can
be utilized for 8-bit or as 16-bit data manipulations. A, B, C, & D
represents accumulator, base, counter and data whereas X represents
16-bit.
AX Register: (A: Accumulator; X: 16 bit): Called as accumulator register
which stores operation result. Can be used as two 8-bit registers AL (Low)
& AH (High) each of 8-bit. Apart from this general purpose operations,
AX is used in multiplication and division operations for word size data.AL

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
60
is used in multiplication and division operations for byte size data whereas
AH is used in multiplication operation for byte size data.
BX Register: (B: Base; X- 16 bit): Used mostly as a base register and it
holds the starting address of the memory base location e.g. accessing of
Look up tables and used with data translate operations. Can be used as two
8-bit registers BL (Low) & BH (High) each of 8-bit.
CX Register: (C: Counter; X- 16 bit): Mostly used as a counter in loop and
counting operations. Can be used as two 8-bit registers CL (Low) & CH
(High) each of 8-bit. CX for string and loop operations whereas CL in shift
and rotate operations.
DX Register: (D: Data; X: 16- bit): Used as a data register for I/O
operations and holds I/O port address location. Used in Multiplication and
Division Operations for word size data and for indirect I/O operations. Can
be used as two 8-bit registers DL (Low) & DH (High) each of 8-bit.
Segment Registers: 8086 Memory is of 1Mb but, a programmer is
accessible to only four (CS, DS, ES & SS) 64-bit segments totaling to

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
61
256 Kb and other memory space is used for storing look tables, micros and
subroutines etc.
1. Code Segment (CS): This segment of 64K holds the code of the
program.
2. Data Segment (DS): This segment of 64K holds the data of the program.
3. Stack Segment (SS): This segment of 64K comes into picture when all
the programmer’s resources are exhausted and it hold data and address
information.
4. Extra Segment (ES): This segment of 64 K acts as another data segment
and used mostly in string manipulation instructions.
Figure 4.2: Memory Segments of 8086

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
62
Segment registers: Each memory segment is associated with 16 bit
register namely CS Register, DS Register, SS Register and ES Register.
All these registers hold the addresses of instructions and data in memory,
which are used by the processor to access memory locations.
Instruction queue: BIU gets up to 6 bytes of next instructions and stores
them in the instruction queue. When EU executes instructions and is ready
for its next instruction, then it simply reads the instruction from this
instruction queue resulting in increased execution speed.
Instruction Pointer register (IP): It holds the offset address within the
code segment of the next instruction to be executed.
Base (BP & SP) and Index (SI & DI) Registers: The pointers (BP & SP)
contain offset within the particular segments. The pointers BP and SP
usually contain offsets within the data and stack segments respectively. SP
always points towards the top of the stack and it is assumed that stack top
is always occupied by previous data. The index registers (SI & DI) are
used as general purpose registers as well as for offset storage in case of

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
63
indexed, based indexed and relative based indexed addressing modes. The
register SI is generally used to store the offset of source data in data
segment while the register DI is used to store the offset of destination in
data or extra segment. The index registers are particularly useful for string
manipulations
Flag Registers It is a 16-bit register and operates as a flip-flop, i.e. it
changes its status according to the result stored in the accumulator. It has
9 flags divided into 2 groups viz. 6 Conditional Flags and 3 Control Flags
• Conditional Flags: (CF, PF, AF, ZF, SF, OF):
• Control Flags: (TP, IF & DF)
Figure 4.3: Flag Register of 8086
Conditional Flags: They represent the result of the last arithmetic or
logical instruction executed.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
64
Carry Flag (CF): Points to whether carry is generated or not. This indicator
shows a mathematical condition for unsigned whole number. It is
additionally utilized as a part of different accuracy number decision
system.
Auxiliary Carry Flag (AF): Used in BCD arithmetic or number
conversions. This flag is set whenever a carry or borrow is generated from
lower to upper nibble.
Parity Flag (PF): This flag is used to indicate the parity of the result, i.e.
when the lower order 8-bits of the result contains even number of 1’s, then
the Parity Flag is set. For odd number of 1’s, the Parity Flag is reset.
Zero Flag (ZF): This flag is set to 1 when the result of arithmetic or logical
operation is zero else it is set to 0.
Sign Flag (SF): This flag holds the sign of the result, i.e. when the result
of the operation is negative, and then the sign flag is set to 1 else set to 0.
Overflow Flag (OF): It indicates the result has exceeded the system limit.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
65
Control Flags: Control flags controls the operations of the execution
unit.
Trap Flag (TP): Utilized for program debugging. If it sets it allows single
step debugging of the program.
Interrupt Flag (IF): It is an interrupt enable/disable flag. If it is set program
is interrupted and if it is disabled program is not interrupted.
Directional Flag (IF): It is used in string operation. When it is set then
string bytes are accessed from the higher memory to lower memory
address and vice-a-versa.
MEMORY ORGANIZATION
8086 is 16-bit processor which supports 1Mbyte (i.e. 20-bit address bus)
of external memory over the address range 000000 to FFFFFF. The 8086
organizes memory as individual bytes of data i.e. each memory location
stores a byte of data. The 8086 can access any two consecutive bytes as a
word of data. The lower-addressed byte is the least significant byte of the
word, and the higher- addressed byte is its most significant byte.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
66
1Mbytes of memory are partitioned into four parts named as segments i.e.
CS (code segment) which holds the program instruction codes;
SS (Stack segment) is used to store interrupt and subroutine return
addresses, DS (Data segment) stores data for the program and ES (Extra
segment) is an extra data segment. Size of each segment is 64Kbytes
(65,536) and these segments are active at a time.
Each of these segments are addressed by an address stored in
corresponding segment (CS, SS, DS, ES) registers. These registers contain
a 16-bit base address that points to the lowest addressed byte of the
segment. Because the segment registers cannot store 20 bits, they only
store the upper 16 bits. But, to fetch a data 20 bit memory address is
required and these calculations are done in hardware within the
microprocessor and BIU is the unit which takes care of this problem by
appending four 0's to the low-order bits of the segment register. In effect,
this multiplies the segment register contents by 16. The segment registers
are user accessible, which means that the programmer can change the
content of segment registers through software.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
67
Actual physical alignment of the 8086’s 1Mbyte memory address space is
divided in to two independent 512Kbyte banks: the low (even) bank and
the high (odd) bank. Data bytes associated with an even address reside in
the low bank, and those with odd addresses reside in the high bank.
Hardware pin A0 and BHE is used to Enable/disable the even/odd banks.
Logical and physical address calculation
Addresses within a segment can range from address 00000h to address
0FFFFh. This corresponds to the 64K-byte length of the segment. An
address within a segment is called an offset or logical address. A logical
address gives the displacement from the base address of the segment to
the desired location within the segment. Physical address is the direct
mapping into the 1M byte memory space. Logical address is in the form
of Base Address: Offset. To specify the logical address in the stack
segment SS: XXXX notation is used which is equal to [SS] * 16 + XXXX.
To calculate the physical address of the memory, BIU uses the following
formula.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
68
Physical Address = Base Address of Segment * 16 + Offset
Example:
The value of Data Segment Register (DS) is 2222H.
To convert this 16-bit address into 20-bit, the BIU appends 0H to the LSB
(by multiplying with 16) of the address. After appending, the starting
address of the Data Segment becomes 22220H.
Data at any location has a logical address specified as: 2222H: 0016H
Where 0016H is the offset, 2222 H is the value of DS
Therefore, the physical address: 22220H + 0016H = 22236 H
The segments and its offset are given in below table:
Segment Offset Registers Function
CS IP Address of the next instruction
DS BX, SI, DI Address of data
SS SP, BP Address in the stack
ES BX, SI, DI Address of destination data (string operations)

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
69
4.3 8086 HARDWARE PIN DIAGRAM
8086 was the first 16-bit microprocessor available in 40-pin DIP (Dual
Inline Package) chip. The detailed pin configuration of an 8086
Microprocessor is depicted below.
Power supply and frequency signals (VCC & GND). It uses 5V DC
supply at VCC pin 40, and uses ground at GND pin 1 and 20 for its
operation
Clock signal (CLK)
Pin19. It provides timing to the processor for operations. Its frequency is
different for different versions, i.e. 5MHz, 8MHz and 10MHz.
Address/data bus (AD0-AD15)
Pin 2-16 & 39. These are multiplexed 16 address/data lines. AD0-AD7
carries low order byte data and AD8-AD15 carries higher order byte data.
During the first clock cycle, it carries 16-bit address and after that it carries
16-bit data.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
70
Address/status bus (A16-A19/S3-S6)
Pin 35-38. These are the 4 address/status buses. During the first clock
cycle, it carries 4-bit address and later it carries status signals.
𝐁𝐇𝐄/𝐒7
Pin 34. BHE stands for Bus High Enable and used to indicate the transfer
of data using data bus D8-D15. This signal is low during the first clock
cycle, thereafter it is active.
Figure 4.4: 8086 Pin Diagram

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
71
𝐑𝐃
Pin 32 active low signal and is used to read signal for Read operation.
READY
Pin 32. It is an acknowledgement signal from I/O devices indicating data
is transferred. It is an active high signal. When it is high, it indicates that
the device is ready to transfer data. When it is low, it indicates wait state.
RESET
Pin 21 and is used to restart the execution. It causes the processor to
immediately terminate its present activity. This signal is active high for
the first 4 clock cycles and microprocessor goes into initial state and in
initial state:CS = FFFF; IP = 0000 and the first instruction will be at
FFFF0. Segments DS, ES, SS = 0000; and flag = 0000
INTR
Pin 18. It is an interrupt request signal, which is sampled during the last
clock cycle of each instruction to determine if the processor considered
this as an interrupt or not.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
72
NMI
Pin 17 and stands for non-maskable interrupt. It is an edge triggered input,
which causes an interrupt request to the microprocessor.
𝐓𝐄𝐒𝐓
Pin 23. When this signal is high, then the processor goes into a wait state
(co-processor), else the execution continues.
𝐈𝐍𝐓𝐀
Pin 24 and it is an interrupt acknowledgement signal. When the
microprocessor receives this signal, it acknowledges the interrupt.
𝐌𝐍/𝐌𝐗
Pin 33 and stands for Minimum/Maximum mode. It indicates mode of
operation of the processor. When it is high, it works in the minimum mode
and if it is low the processor works in maximum mode.
ALE
Pin 25 and it is address enable latch pin. This signal indicates the
availability of a valid address on the address/data lines and finds use in
multiplexing of address and data lines with the help of 74LS373 latch.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
73
𝐃𝐄𝐍
Pin 26 and it is Data Enable pin. It is used to enable Transreceiver 8286.
The transreceiver is a device used to separate data from the address/data
bus.
𝐃𝐓/𝐑
Pin 27 and it is a Data Transmit/Receive signal. It represents direction of
data flow through the trans receiver. When it is high, data is transmitted
out and if its low data is received in.
𝐌/𝐈𝐎
Pin 28 and it is used to distinguish between memory and I/O operations.
When it is high, it indicates I/O operation and when it is low indicates the
memory operation.
𝐖𝐑
Pin 29 and it is a write signal. It is used to write the data into the memory
or the output device depending on the status of M/IO signal.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
74
HLDA
Pin 30 and it is Hold Acknowledgement signal. This signal acknowledges
the HOLD signal.
HOLD
Pin 31 and it indicates to the processor that external devices are requesting
to access the address/data buses.
QS1 and QS0
Pin 24 and 25 and are the queue status signals. These signals provide the
status of instruction queue. As per the table below
QS0 QS1 Status
0 0 No operation
0 1 First byte of opcode from the queue
1 0 Empty the queue
1 1 Subsequent byte from the queue
LOCK
Pin 29 which is an active high signal and it locks the processor such that
other processors cannot be able to use the buses.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
75
S0, S1, S2
Pin 2-28. They provide the status of operation and used by the Bus
Controller 8288 to generate memory & I/O control signals. Operation is
described as per the table:
S2 S1 S0 Status
0 0 0 Interrupt Acknowledge
0 0 1 I/O Read
0 1 0 I/O Write
0 1 1 HLT
1 0 0 Opcode Fetch
1 0 1 Memory Read
1 1 0 Memory Write
1 1 1 Passive
RQ/GT1 and RQ/GT0
Pin 29-30 and are the Request/Grant signals used by the other processors
requesting the CPU to release the system bus. When the signal is received
by CPU, then it sends acknowledgment. RQ/GT0 has a higher priority than
RQ/GT.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
76
CHAPTER- 5
8086 SOFTWARE DESCRIPTION AND CONCEPTS
Programmer must be aware of the language of the machine in which it
communicates with outside world and that language is machines
instruction set. Instructions are the commands passed on to the machine to
perform certain function or functions.
5.1 INSTRUCTION SET
The 8086 microprocessor supports eight types of instructions are those
are:
• Data Transfer Instructions
• Arithmetic Instructions
• Logical Instructions
• String Instructions
• Program Execution Transfer Instructions (Branch & Loop
Instructions)
• Processor Control Instructions
• Bit Manipulation Instructions

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
77
DATA TRASFER INSTRUCTIONS & CONCEPTS
MOV, LEA, LDA, LES, XCHG, XLAT, LAHF, SAHF, PUSH, POP,
IN AND OUT are the instructions under this group which covers
register transfer, segment transfer, stack transfer, flag transfer, data
exchanges, data conversions, and peripheral data transfer modes.
The following concepts should be known before applying the
instructions.
➢ Transfer of data between processor or I/O devices or within
the processor.
➢ Data sizes must be same
➢ No memory to memory data transfer is possible.
➢ No immediate data can be loaded into the segment directly.
The immediate data is loaded first into the GPR (general
purpose register) and then transferred to the segment.
The following pair of instructions forms the first initialization instructions
in any a program
MOV AX, DATA
MOV DS, AX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
78
Word Transfer Instructions
MOV − Used to copy the byte or word from source to destination. Source
contents are not destroyed whereas destination contents are destroyed.
Variants are:
MOV Reg/Reg
MOV Reg/Mem
MOV Mem/Reg
Examples: MOV AX, BX
MOV AX, [SI]
MOV [DI], AX
The instruction MOV [SI], [DI] is invalid since no memory to memory
data transfer is possible. The data from the memory is brought into the
GPR first and then to memory
The instruction MOV AL, BX is invalid since data sizes are different (AL-
8 BIT; BX is 16 bit). The rule for data transfer is that data sizes must be
same. At the same time MOV BX, AL is true but it points to wastage of
resources as BX is 16 bit whereas AL is of 8 bit so instead of BX, BL or
BH can be used (both are of 8 bit)

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
79
PUSH – Stores 16 bit value on the stack. SP decrements by 2.
POP − Gets 16 bit value from stack and SP increments by 2
Stack pointer register (SP) always points towards the top of the stack and
is assumed to be occupied by previous data.
PUSH instruction always puts word data (two bytes) onto the stack.
Whenever data are pushed on to the stack the first (MSB) moves into
location addressed by SP-1 and second (LSB) to SP-2 and SP decrements
by 2. POP instruction retrieves 16 bit data (two bytes) from stack and SP
increments by 2.
XCHG − Used to exchange the data from two locations (Data sizes must
be same). The variants are
➢ XCHG Reg, Reg
➢ XCHG Reg, Mem
➢ XCHG Mem, Reg

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
80
XLAT − Used to translate a byte in AL using a look up table in the
memory.
Look up table is assumed to be stored in data segment. BX register
contains the offset address of the table in the data segment. Data for which
code is required is stored in AL register only and then XLAT is applied.
MOV AX, DATA
MOV DS, AX
MOV BX, OFFSET ADDRESS
MOV AL, DATA
XLAT
INT 3
Input and Output Manipulations Instructions
• IN −reads a byte or word from the given port to the accumulator
(AL OR AX)
• OUT −sends out a byte or word from the accumulator to the given
port.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
81
Address Transfer Instructions
• LEA − loads the effective address of operand into the given processor
registers.
• LDS − loads DS register and other given register from the memory
• LES − loads ES register and other given register from the memory.
Both LDS and LES are effectively used for string data.
Flag Register Transfer Instructions
• LAHF − loads AH with the low byte of the flag register.
• SAHF − stores AH register to low byte of the flag register.
• PUSHF − copes the flag register at the top of the stack.
• POPF − copies a word at the top of the stack to the flag register
ARITHMATIC INSTRUCTIONS
• ADD – adds byte to byte/word to word i.e. OPR1 + OPR2.
• ADC − adds with carry i.e. OPR1 +OPR2 +CF.
• SUB − subtracts byte from byte/word from word i.e. OPR 1-OPR2.
• SBB − subtraction with borrow i.e. OPR1 –OPR2 –CF.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
82
• MUL − multiply unsigned byte by byte/word by word i.e.
Byte MUL AX= AL * OPR
Word MUL [DX AX] = AX * OPR
• IMUL − multiply signed byte by byte/word by word i.e.
Byte IMUL AX= AL* OPR
Word IMUL [DX AX] = AX * OPR
8 bit result is in AL & AH whereas 16 bit result is in AX & DX
• DIV – divides unsigned word by byte or unsigned double word by
word.
Byte AL = AX/OPR
AH = REM
Word AX = [DX AX] / OPR
DX = REM
• IDIV – divides signed word by byte or signed double word by word.
Byte AL = AX/OPR
AH = REM
Word AX = [DX AX] / OPR
DX = REM
8 bit result is in AL & AH whereas 16 bit result is in AX & DX.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
83
NUMBER CONVERSION INSTRUCTIONS.
• DAA − Used to adjust the decimal after the addition/subtraction
operation.
• DAS − Used to adjust decimal after subtraction.
• DAM -Decimal adjustment after multiplication.
• DAD - Decimal adjustment after division.
These instructions are applied for Decimal Numbers.
If AL > 9 OR AF=1 If AL > 9F
Then
AL = AL+ 6 AL = AL+60
AF= 1 CF = 1
Example: 59 + 29 =88 but in binary
59 = 01011001
29 = 00101001
_____________________
(AF =1) 10000010
6 added 0110
_____________________
88 10001000

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
84
• AAA − ASCII adjust after addition.
• AAS − ASCII adjust after subtraction.
• AAM − ASCII after multiplication
• AAD − ASCII adjust after division
Used for ASCII Number system. From 0-9, 30 are added and from
A-F, 37 are added to get ASCII codes.
Example: A – 10 – 1010 (greater than 9; 6 is added)
0110
__________ 11000 = 10 (decimal) F – 15 – 1111 (greater than 9; 6 is added)
0110 __________ 10101 = 15 (decimal)

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
85
LOGICAL INSTRUCTIONS
CONCEPTS
➢ No memory to memory and immediate data is allowed in shift and
rotate instructions.
➢ For shift and rotate operations counter is to be established if
operations are more than one.
➢ Negative numbers are represented in 2’s complement form.
➢ Compare instruction is always followed by conditional jump
instruction.
Performs operation on data bits such as logical and shift, etc.
• NOT − inverts each bit of a byte or word. Gives 1’s complement.
• NEG − Gives 2’s complement
• AND − adds each bit in a byte/word with the corresponding bit in
another byte/word.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
86
• OR − multiplies each bit in a byte/word with the corresponding bit
in another byte/word.
• XOR − performs Exclusive-OR operation over each bit in a
byte/word with the corresponding bit in another byte/word.
• TEST − updates flags. Bit must be one. Bit by bit logical AND
operation.
• SHL – It is logical left shift operation and it shifts bits of a
byte/word towards left and put zero(S) in LSBs.
• SAL – It is arithmetic left shift operation and it shifts bits of a
byte/word towards left and put zero(S) in LSBs.
• SHR – It is a logical right shift operation and shifts bits of a
byte/word towards the right and put zero(S) in MSBs.
• SAR – It is an arithmetic right shift operation and shifts bits of a
byte/word towards the right and copy the old MSB into the new
MSB.
SHL/ SAL are equal to multiplication by 2 AND
SHR/SAR are equal to division by 2.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
87
• ROL − rotate bits of byte/word towards the left, i.e. MSB to LSB
and to Carry Flag [CF].
• ROR − rotate bits of byte/word towards the right, i.e. LSB to MSB
and to Carry Flag [CF].
• RCR − rotate bits of byte/word towards the right, i.e. LSB to CF
and CF to MSB.
• RCL − rotate bits of byte/word towards the left, i.e. MSB to CF
and CF to LSB.
ROL/ ROR rotate bits without carry and are used to check positive /
negative numbers.
RCR/RCL rotates bits with carry and are used to find smaller or
greater numbers.
• CMP – Compares source with destination. It is a subtraction
operation.
If ZF=1, source and destination are equal.
If CF=1, source > destination
If CF=0, source < destination.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
88
• INR – Increments Register / Memory by one i.e. OPR = OPR +1
• DCR – Decrements Register / Memory by one i.e. OPR = OPR -1
DATA SIZE CONVERSION INSTRUCTIONS.
(Useful in division operations)
• CBW – Converts byte data to word and fills the upper byte of the
word with the copies of sign bit of the lower byte.
• CWD – Converts word data into double word and fills the upper
word of the double word with the sign bit of the lower word.
• CDQ – Converts double word data into quad word and fills the
upper word of the quad word with the sign bit of the lower word
• CQT – Converts quad word data into ten word and fills the upper
word of the ten word with the sign bit of the lower word

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
89
STRING INSTRUCTIONS
CONCEPTS
➢ String is a group of bytes/words
➢ Allocation of memory for string is in sequential order
➢ Default segments used are DS and ES with SI and DI punters.
INSTRUCTION
• MOVSB/MOVSW − Moves byte/word from one string to another.
• LODSB/LODSW − Loads string byte into AL or string word into AX.
• STOSB/STOSW − Stores string byte into AL or string word into AX
• SCASB/SCASW −Scans a string and compare its byte with a byte in
AL or string word with a word in AX.
• COMPSB/COMPSW − Compares two string bytes/words.
• REP − Repeats the given instruction till CX = 0.
• REPE − Repeats the given instruction until CX = 0
• REPNE −Repeats the given instruction until CX = 0

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
90
PROGRAM EXECUTION TRANSFER INSTRUCTIONS
These instructions are used to transfer/branch the instructions during an
execution.
CONCEPTS
➢ There are two types of jumps i.e. unconditional and conditional.
➢ There are two types of jumps i.e. Intrasegment (within 64k) and
Intersegment (within 1MB)
➢ Intrasegemnt jump requires change only in IP whereas intersegment
requires change in CS and IP.
INSTRUCTIONS
JUMP INSTRUCTIONS
UNCONDITIONAL JUMP
• JMP –Jumps to the mentioned address to proceed to the next
instruction
CONDITIONAL JUMP (Mostly used)
• JC – Program Jumps to the location given in the program if carry
flag CF = 1

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
91
• JNC − Program Jumps to the location given in the program if carry
flag CF = 0
• JE/JZ − Program jumps if equal/zero flag ZF = 1
• JNE/JNZ – Program jumps if not equal/zero flag ZF = 0
• JP/JPE – Program jumps if parity/parity even PF = 1
• JNP/JPO – Program jumps if not parity/parity odd PF = 0
• JNO − Used to jump if no overflow flag OF = 0
• JO − Used to jump if overflow flag OF = 1
LOOP INSTRUCTIONS
UNCONDITIONAL LOOP
• LOOP − Loops a group of instructions till it satisfies CX = 0.
CONDITIONAL LOOP
• LOOPE/LOOPZ − Loops a group of instructions till it satisfies
ZF = 1 & CX = 0
• LOOPNE/LOOPNZ − Loops a group of instructions till it
satisfies ZF = 0 & CX = 0
LOOP instruction is used in structures programming.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
92
PROCESS CONTROL INSTRUCTIONS
CONCEPTS
➢ Procedures is a small group of instructions which repeats itself in
the main program)
➢ Procedures are called in the main program by using CALL and
returned by using RET instructions
➢ Procedure may be NEAR (within segment i.e. 64k) or FAR (outside
segment i.e. outside 64k)
➢ Procedures requires memory
➢ Procedures are called after code of the program.
INSTRUCTIONS
• CALL − Calls a procedure and saves the return address on to the
stack.
• RET − Returns from the procedure to the main program.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
93
BIT MANIPULATION INSTRUCTIONS
CONCEPTS
➢ Operates on bits of flags
➢ Controls the processor action by setting / resetting of flag bits
INSTRUCTIONS
• STC − Sets carry flag CF to 1
• CLC − Clears/resets a carry flag CF to 0
• CMC − Complements the carry flag CF.
• STD − Sets the direction flag DF to 1
• CLD − Clears/resets the direction flag DF to 0
• STI − Sets the interrupt enable flag to 1, i.e., enables INTR input.
• CLI − Clears the interrupt enable flag to 0, i.e., disables INTR input.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
94
5.2 8086 ADDRESSING MODES
CONCEPTS
➢ Data or information may be implicit, may be stored in registers,
may be stored in memory and accordingly data or information is
addressed in the programming. The method of accessing the data
is termed as addressing mode.
➢ For accessing the data or information 20 bit address is a must for
its location. The hardware does it internally.
➢ Segments always start at a memory location with 0H as the least
significant digit e.g. FFFF0H but not FFFF6H.
➢ Data’s can be accessed as either byte or word and can be stored at
an even or add address. Each location of memory stores one byte
of data.
IMPLICIT, DATA & REGISTER MODES
1) Implicit/ Inherent/ Zero operand Mode: - Data is within the instruction
itself
e.g. DAA, AAA, STC

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
95
2) Immediate Mode: - Data is given in the instruction itself.
e.g. MOV AX, 1234H
MOV CX, 0004H
3) Register Mode: - Data are transferred using GPR’S.
e.g. MOV AX, BX
MOV CS, DX
MEMORY MODES: DIRECT MODE
1) Direct Mode: - Memory location is given in instruction itself.
e.g. MOV AX, [7000H]
MOV [8000H], BX
MEMORY MODES: INDIRECT MODE
1) Indexed Mode: SI & DI points to the location indirectly.
e.g. MOV [SI], 0006H
MOV [BX], 0006H
2) Based Mode: Base registers are used to point memory address
e.g. MOV [BP], 0006H
MOV AX, [SP]

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
96
3) Based indexed Mode: Memory location is pointed by base and
indexed registers.
e.g. MOV [BP] [DI], 0006H
4) Based with displacement mode: Memory location is pointed by
combination of base registers and 8 or 16 bit displacement:
e.g. MOV 43H [BP], 0006H
5) Indexed with displacement mode: Memory location is pointed by
combination of indexed registers and 8 or 16 bit displacement:
e.g. MOV 43H [DI], 0006H
6) Based Indexed with displacement mode: Memory location is pointed
by base, indexed registers along with 8 bit or 16 bit displacements
e.g. MOV [DI+BP+65], 0006H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
97
CHAPTER- 6
PROGRAMMING 8086
6.1 PROGRAMMNG STEPS
➢ Initialize segment/ segments
➢ Write down the initialization instructions
➢ Write down the operational instructions
➢ Write down the conditional instructions
➢ Write down the result display instructions
➢ Write instruction to stop the process
6.2 ASSEMBLER DIRECTIVES
A programmer writes program (which is a group of instructions) in a high
level language. The assembler converts this high level language into
machine language and hence certain pseudo instruction are required to be
furnished by the programmer to the assembler such that the assembler
understands what is what in a program. These pseudo instructions are for
the data sizes, constants, segments, labels, macros, subroutines and
memories.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
98
CONCEPTS
➢ Data size directives: data Sizes Directive
Byte DB
Word DW
Double Word DD
Ten Bytes DQ
➢ A zero must be placed before a hex number that starts with a letter
(A-F) otherwise the assembler treats it as a label but not as a
numeric number.
➢ A constant in a program like counter is to be declared by using EQU
(equals) directive with label for the directive, e.g. count EQU 08h
➢ A programmer must declare what segment he is using in a program
by using a directive ASSUME, e.g. ASSUME cs: code, ds: data, es:
extra, ss: stack
➢ A programmer must declare the segment in use followed by filling
up of code/ data and then close the segment by using END
directive, e.g.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
99
DATA SEGEMNT
LABEL 1 DB DATA1, DATA2
COUNT EQU 2DB
DATA ENDS
➢ A programmer must begin the program by writing instructions in
the code segment by using START directive and after instruction
writing he must end the program by writing ENDS directive, e.g.
➢ CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
--
CODE ENDS
END START
➢ The procedures are called by the directives LABEL PROC NEAR
or LABEL PROC FAR followed by LABEL ENDP NEAR or
LABEL ENDP FAR.
➢ Procedures are called after end of the code.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
100
➢ The Micros are called in the program by using LABEL MACRO
followed by LABEL ENDM directives.
➢ Macros are called before code starts.
6.3 SUBROUTINES AND MICROS
➢ Subroutines or procedures are the group of instructions which
perform specific operations. They are called at the end of the
program.
➢ Procedures are called in the main program by using CALL
instructions and returned by using RET instructions and uses
directives LABEL PROC and LABEL ENDP.
➢ Procedures require memory.
➢ MICROS are set of instructions to carry out specific task. They are
called at the beginning of the program.
➢ Macros do not separate instructions but, they do require directives
such as LABLE MACRO & LABEL ENDM.
➢ Macros do not require separate memory as they are defined in the
main program itself.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
101

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
102
6.4 BIOS AND DOS INTERRUPTS
Interrupts are the software or hardware events which halts the processor
till interruption is resolved. The 8086 has two hardware interrupts NMI
(non maskable) and INTR (interrupt request) NMI is a non-maskable
interrupt and INTR is a maskable interrupt having lower priority. There
are 256 Interrupts of which:
• TYPE 0 divides by zero interrupt.
• TYPE 1 single step debugging interrupt.
• TYPE 2 non-maskable NMI interrupt.
• TYPE 3 break-points interrupt.
• TYPE 4 overflows interrupt.
Type 5 to Type 31 interrupts are reserved for other advanced
microprocessors, and interrupts from 32 to Type 255 are available for
hardware and software interrupts. Apart from these there are certain Basic
I/O system (BIOS) interrupts and Disk Operating System (DOS) Interrupts
are used for specific applications among them are:

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
103
DOS INTERRUPTS
➢ INT 21H (DOS) Interrupt used to display the character
USE 1: - Inputs a single character from keyboard and echoes it to
the monitor.
Registers used: AH = 1, AL = the character inputted from
keyboard.
Ex: MOV AH, 1
INT 21H
USE 2: - Outputs a single character to the monitor.
Registers used: AH = 2, DL = the character to be displayed.
Ex: MOV AH, 2
MOV DL, ‘M’
INT 21H
USE 3: - Outputs a string of data terminated by ‘$’ sign to the
monitor.
Registers used: AH =9, DX = the offset address of the data.
Ex: MOV AH, 9
MOV DX, offset msg1
INT 21H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
104
USE 4: - Termination of a process
Registers used: AH =4CH, AL = binary returned code.
Ex: MOV AH, 4CH
INT 21H
BIOS INTERRUPTS
➢ INT 14H Interrupt is used for serial communication. AH should
contain the function call
Function call 00: Initialize the comm. port
Function call 01: Send a character
Function call 02: Receive a character.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
105
CHAPTER-7
PROGRAMMING WITHIN 8086: EXAMPLES
Programming examples which are considered here are of within the
processor. The programmer must have thorough knowledge about the
hardware and the software i.e. resources and instruction set of 8086. The
programmer must be intelligent enough to handle the resources and
instructions effectively such that the length of the program can be reduces
and there by execution time can be saved.
7.1 CONCEPTS
Some important concepts are reproduced for the benefit of the
beginners.
➢ The programmer must have thorough knowledge about the
resources and instruction set of 8086.
➢ Architecturally 8086 have four GPR’s namely AX, BX, CX & DX.
AX is used as a GPR and in multiplication and division operations.
BX is used as a GPR & base pointer for code conversion operations.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
106
CX is a default counter as well as a GPR. DX is used as a GPR,
multiplication, division operation and I/O operations.
➢ The programmer can use same segment for data and code i.e. as
code segment and data segment for small programs but, he must
have knowledge about four segments viz. CS, DS, ES & SS. DS &
ES are the default segments for string manipulations whereas SS is
used in stack operations. The stack pointer always points towards
the top of the stack and builds towards 0H.
➢ In data transfer operations data sizes must be same and destination
information is destroyed whereas source data is not destroyed.
➢ Each location stores one byte of data.
➢ No memory to memory data transfer is possible.
➢ No immediate data can be loaded into the segment directly. The
immediate data is loaded first into the GPR (general purpose
register) and then transferred to the segment.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
107
The pair of instruction for this forms the first initialization
instruction in any a program
MOV AX, DATA
MOV DS, AX
➢ In decimal adjust operation 6 is added whenever the result is greater
than 9.
➢ In ASCII number system from 0-9, 30 is added and from A-F 37 is
added.
➢ In arithmetic operation the result is stored in accumulator.
➢ In 8 bit multiplication the sum is in AL with carry in AH whereas
in 16 bit multiplication AX contains the sum and DX contains the
carry.
➢ Negative numbers are represented in 2’s complement form.
➢ No memory to memory and immediate data is allowed in shift and
rotate instructions.
➢ For shift and rotate operations counter is to be established if
operations are more than one.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
108
➢ Compare instruction is always followed by conditional jump
instruction.
➢ Decrement instruction is always followed by a jump instruction.
➢ SHL/ SAL are equal to multiplication by 2
➢ SHR/SAR are equal to division by 2.
➢ ROL/ ROR rotate bits without carry and are used to check
positive / negative numbers.
➢ RCR/RCL rotates bits with carry and are used to find smaller or
greater numbers.
➢ Data size conversion instructions are useful in division operations.
➢ A zero must be placed before a hex number that starts with a letter
(A-F) otherwise the assembler treats it as a label but not as a
numeric number.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
109
7.2 WORKED EXAMPLES ON 8086
Example 1) Write a program to transfer 10 bytes of data from one location
to another within one segment.
Assume cs: code, ds: data
Data segment / note that D is upper case
Array1 db 00h, 01h, 02h, 03h, 04h, 05h, 06h, 07h, 08h, 09h
Count equ 0ah / C is uppercase
Array2 db? / A is upper case
Data ends / note that D is maintained as upper case
Code segment / C is upper case
start: mov ax, data
mov ds, ax
mov es, ax
mov cl, Count / C maintained as upper case
mov si, offset Array1 / A is maintained as upper case
mov di, offset Array2 / A is maintained as upper case

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
110
back: mov al, [si]
mov [di], al
inc si
inc di
dec cl
jnz back
int 3
Code ends / C maintained as upper case
end start
** Assembly programming is case sensitive hence care should be taken
else syntax errors will occur.
** If syntax error occurs, one has to revisit the program, correct the
error in the shown line number.
**After corrections, one has to save the program and then execute.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
111
Example 2) Write a program to transfer 10 bytes of data from one location
to another taking two segments.
Assume cs: code, ds: data, es: extra
data segment / d lower case
array1 db 00h, 01h, 02h, 03h, 04h, 05h, 06h, 07h, 08h, 09h
count equ 0ah / c lower case
data ends / d maintained as lower case
extra segment / e lower case
array2 db oah dup (0) / a lower case
extra ends / e maintained as lower case
code segment / c maintained as lower case
start: mov ax, data
mov ds, ax
mov ax, data
mov es, ax
mov cl, count / c (in count) maintained as lower case
mov si, offset array1 / a (array1) maintained as lower case

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
112
mov di, offset array2 / a (array2) maintained as lower case
back: mov al, [si]
mov [di], al
inc si
inc di
dec cl
jnz back
int 3
code ends / c (code) maintained as lower case
end start / label (start) maintained as lower case
*** If one types CS:CODE in the first line and types code ends in the 24th
line (highlighted), it shows syntax error, since one is having upper case
letters and the other has small letters.
***one has to change the first line or the 24th line so that both looks the
same (upper case or lower case)

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
113
Example 3) Write a program to transfer 5 words of data from one segment
to another without string instructions.
ASSUME CS: CODE, DS: DATA, ES: EXTRA
DATA SEGMENT
ARRAY1 DW 1111H, 2222H, 3333H, 4444H, 5555H
COUNT EQU 05H
DATA ENDS
EXTRA SEGMENT
ARRAY2 DW? / can be put as ARRAY2 DW 05H
DUP(?) or (0)
EXTRA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AX, EXTRA
MOV ES, AX
MOV SI, OFFSET ARRAY1

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
114
MOV DI, OFFSET ARRAY2
MOV CL, COUNT
BACK:MOV AX, [SI]
MOV [DI], AX
INC SI
INC SI / two time increment for word; it can be SI+2
INC DI
INC DI
DEC CL
JNZ BACK
INT 3
CODE ENDS
END START

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
115
Example 4) Write a program to transfer 5 words of data from one segment
to another with string instructions.
ASSUME CS: CODE, DS: DATA, ES: EXTRA
DATA SEGMENT
ARRAY1 DW 1111H, 2222H, 3333H, 4444H, 5555H
COUNT EQU 05H
DATA ENDS
EXTRA SEGMENT
ARRAY2 DW?
EXTRA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AX, EXTRA
MOV ES, AX
MOV SI, OFFSET ARRAY1
MOV DI, OFFSET ARRAY2

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
116
MOV CL, COUNT
CLD /directional flag must be cleared before string operation
REP MOVSW
INT 3
CODE ENDS
END START
Example 5) Write an Assembly Language Program (ALP) for exchange of
10 bytes of data.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
ARRAY1 DB 11H, 22H, 33H, 44H, 55H
ARRAY2 DB 66H, 77H, 88H, 99H, 0AH
COUNT EQU 0AH
DATA ENDS
CODE SEGMENT
START:MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET ARRAY1
MOV DI, OFFSET ARRAY2

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
117
MOV CL, COUNT
AGAIN:MOV AL, [SI]
MOV BL, [DI]
XCHG AL, BL
INC SI
INC DI
DEC CL
JNZ AGAIN
INT 3
CODE ENDS
END START
Example 6) Write an Assembly Language Program (ALP) to arrange 100
bytes in reverse order. The source is present from 2000:1000h and
destination start from 3000:0000h.
ASSUME CS: CODE, DS: DATA, ES: EXTRA
DATA SEGMENT
ORG 1000H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
118
DB 100 DUP (0) / 100 is in decimal and its hexadecimal is
/64H, without H, it is considered as a
/decimal no
DATA ENDS
EXTRA SEGMENT
ORG 0000H
DB 100 DUP (0)
EXTRA ENDS
CODE SEGMENT
START: MOV AX, 2000H
MOV DS, AX
MOV AX, 3000H
MOV ES, AX
MOV SI, 1000H
MOV DI, 0000H
MOV CX, 100 / Can be written as MOV CX, 64H
BACK: MOV AL, [SI]
MOV [DI], AL

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
119
INC SI
DEC DI / DEC for reverse order
DEC CX
JNZ BACK
INT 3
CODE ENDS
END START
Example 7) Write an Assembly Language Program (ALP) to exchange 100
words each in two blocks. Use same base address for all memory segments
7000H: 1000H: 0000H.
ASSUME CS: CODE, DS:DATA, ES: EXTRA
DATA SEGMENT
ORG 1000H
DUP 64H DUP (0) / decimal 100 is 64H
DATA END

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
120
EXTRA SEGMENT
ORG 0000H
DB 64H DUP (0)
EXTRA ENDS
CODE SEGMENT
START:MOV AX, 7000H
MOV DS, AX
MOV ES, AX
MOV SI, 1000H
MOV DI, 0000H
MOV CX, 64H
BACK:MOV AX, [SI]
XCHG AX, [DI]
MOV [SI], AX
INC SI+2 / Two times INC for word or ADD SI, 2
INC DI+2
DEC CX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
121
JNZ BACK
CODE ENDS
END START
Example 8) Write an Assembly Language Program (ALP) for multibyte
addition without carry and with carry.
Addition without carry
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DW 1234H /two byte number
NUM2 DW 1234H /Two byte number
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET NUM1
MOV DI, OFFSET NUM2
MOV CL, 02H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
122
BACK: MOV AL, [SI] /one byte at a time
MOV BL, [DI] / one byte at a time
ADD AL, BL /one byte addition
MOV DL, AL
INC SI
INC DI
DEC CL
JNZ BACK
INT 3
CODE ENDS
END START
Addition with Carry
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DW 1234H /two byte number
NUM2 DW 1234H /two byte number
DATA ENDS

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
123
CODE SEGMENT
START:MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET NUM1
MOV DI, OFFSET NUM2
MOV CL, 02H
BACK: MOV AL, [SI] /one byte at a time
MOV BL, [DI] /one byte at a time
ADC AL, BL /one byte addition with carry
MOV DL, AL
INC SI
INC DI
DEC CL
JNZ BACK
INT 3
CODE ENDS
END START

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
124
Example 9) Write an Assembly Language Program (ALP) for multibyte
subtraction without barrow and with borrow.
Subtraction without borrow
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DW 1234H /two byte number
NUM2 DW 1234H / two byte number
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET NUM1
MOV DI, OFFSET NUM2
MOV CL, 02H
BACK: MOV AL, [SI] /one byte at a time
MOV BL, [DI] /one byte at a time
SUB AL, BL / sub without barrow

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
125
MOV DL, AL
INC SI
INC DI
DEC CL
JNZ BACK
INT 3
CODE ENDS
END START
Subtraction with borrow
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DW 1234H / two byte number
NUM2 DW 1234H / two byte number
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
126
MOV SI, OFFSET NUM1
MOV DI, OFFSET NUM2
MOV CL, 02H
BACK: MOV AL, [SI] /one byte at a time
MOV BL, [DI] /one byte at a time
SBB AL, BL /one byte sub with borrow
MOV DL, AL
INC SI
INC DI
DEC CL
JNZ BACK
INT 3
CODE ENDS
END START

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
127
Example 10) Write an Assembly Language Program (ALP) for 8 bit
multiplication.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DW 8H /one byte number
NUM2 DW 4H /one byte number
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AL, NUM1 /first number in AL (8 BIT)
MOV BL, NUM2 /second number in BL
MUL BL / AL X BL: hidden operand is AL
/ AL=SUM, AH=CARRY
INT 3
CODE ENDS
END START

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
128
Example 11) Write an Assembly Language Program (ALP) for 8 bit
division.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DB 8H /one byte number
NUM2 DB 4H /one byte number
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AL, NUM1 /first number in AL (8 BIT)
MOV BL, NUM2 /second number in BL
DIV BL / AL / BL: hidden operand is AL
/ AL=Quotient, AH=Reminder
INT 3
CODE ENDS
END START

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
129
Example 12) Write an Assembly Language Program (ALP) for 16 bit
multiplication.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DW 2222H /first word
NUM2 DW 1111H /second word
SUM DW?
CARRY DW?
DATA ENDS
CODE SEGMENT
START:MOV AX, DATA
MOV DS, AX
MOV AX, NUM1 /first number in AX (16-bit)
MOV BX, NUM2 /seconnd number in BX
MUL BX / AX X BX: AX is hidden operand
/AX=SUM, DX=CARRY
MOV SUM, AX
MOV CARRY, DX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
130
INT 3 / can be replaced by
/ MOV AH,4CH
/ INT 21H
CODE ENDS
END START
Example 13) Write an Assembly Language Program (ALP) for 16 bit
Division.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DW 2222H /first word
NUM2 DW 1111H /second word
QUO DW?
REM DW?
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AX, NUM1 /first number in AX (16-bit)
MOV BX, NUM2 / second number in BX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
131
DIV BX / AX / BX: AX is hidden operand
/ AX=quotient, DX=remainder
MOV QUO, AX
MOV REM, DX
INT 3
MOVAH,4CH / can be replaced by INT 21H
CODE ENDS
END START
Example 14) Write an Assembly Language Program (ALP) to add two
decimal numbers.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM1 DB 39H
NUM2 DB 27H
SUM DB 01H DUP(?)
DATA ENDS
CODE SEGMENT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
132
START: MOV AX, DATA
MOV DS, AX
MOV AL, NUM1
MOV BL, NUM2
MOV DI, OFFSET SUM
ADD AL, BL
DAA
MOV [DI], AX
INT 3
CODE ENDS
END START
***DAA & DAS works with respect to Accumulator.
How DAA works:
39H→ 0011 1001
+27H →+0010 0111
----------------------------
66H 0110 0000 →60H
+ 0000 0110 →66H /Add 6 to adjust to decimal as carry is
/generated while adding LSB

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
133
Example 15) Write an Assembly Language Program (ALP) to add two
decimal numbers by using ASCII codes.
Single digit addition
ASSUME CS: CODE
CODE SEGMENT
MOV AL, 2
MOV BL, 3
AAA
ADD AL, 30H
INT 3
CODE ENDS
END
HOW AAA WORKS:
2 →00000010
+ 3→ 00000011
--------------
05→ 00000101
+30→ 00110000
----------------------
35→00110101 / ASCII OF 5 IS 35

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
134
Two-digit addition
ASSUME CS: CODE
CODE SEGMENT
MOV AL, 7
MOV BL, 5
AAA
ADD AL, 3030H /ASCII OF 12 IS 3132
INT 3
CODE ENDS
END
Example 16) Write an Assembly Language Program (ALP) to convert
packed BCD to unpacked BCD.
**4 bits per digit is packed BCD & 8 bits per digit is unpacked BCD
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUM1 DB 57H
DATA ENDS
CODE SEGMENT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
135
START: MOV AX, DATA
MOV DS, AX
MOV AL, NUM1 /AL=57
AND AL,0F0H /AL=50
MOV CL,04H
ROR AL, CL /AL=05
ADD AH,00H
MOV BL, AL / BL=05H
MOV AL, NUM1 /AL=57
AND AL,0FH /AL=07
ADD AH,00H
MOV BH, CL /BH=07
INT 3
CODE ENDS
END START
RESULT: BX=0507

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
136
Example 17) Write an Assembly Language Program (ALP) to convert
packed BCD to ASCII.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUM1 DB 24H
RESULT DB?
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AL, NUM1 /AL=24
AND AL, 0F0H /AL=20
MOV CL, 04H
ROR AL, CL /AL=02
ADD AL, 30H /AL=32
MOV RESULT, AL / RESULT=32H
MOV AL, NUM1 /AL=24

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
137
AND AL, 0FH /AL=04
ADD AL, 30H
MOV RESULT+1, AL /RESULT+1=34
INT 3
CODE ENDS
END START
RESULT: BX=0507
Example 18) Write an Assembly Language Program (ALP) to add two
numbers and display the result on console.
ASSUME CS:CODE, DS:DATA
DATA SEGMENT
NUM1 DW 2345H
NUM2 DW 2345H
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
138
MOV AX, NUM1
MOV BX, NUM2
ADD AX, BX
MOV CH,04H
MOV CL,04H
MOV BX, AX
BACK1:ROL BX, CL
MOV DL, BL
AND DL,0FH
CMP DL,09H
JBE BACK2
ADD DL,07H
BACK2:ADD DL,30H
MOV AH,2
INT 21H
DEC CH
JNZ BACK1

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
139
MOV AH,4CH
INT 21H
CODE ENDS
END START
** 468Ais displayed on the console.
Example 19) Write an Assembly Language Program (ALP) to find average
of numbers and display the result on console.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
ARRAY DB 09H,06H,05H,05H,05H,06H
AVG DB?
MSG DB “AVG=$”
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
LEA SI, ARRAY / can be written as
/ MOV SI, OFFSET ARRAY

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
140
LEA DI, MSG / can be written as MOV DI,
/ OFFSET MSG
MOV AH,9 / For display string
INT 21H / DOS INT for display
MOV AX,0
MOV BL,06 /For division
MOV CL,06H /For count
BACK: ADD AL, ARRAY [SI] /Total SUM in AL
INC SI
DEC CL
JNZ BACK
DIV BL / For Average→AL/BL
MOV DL, AL /To display AL is in DL
CMP DL,09H
JBE NEXT
ADD DL,07H
NEXT: ADD DL,30H
MOV AH,2H /For display Digit

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
141
INT 21H /DOS INT for display
MOV AH,4CH /terminate the program
INT 21H
CODE ENDS
END START
*** AVG=6 displayed on console
Example 20) Write an Assembly Language Program (ALP) to find larger
number and display the result on console.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
ARRAY DB 8H,4H,5H,0FH,9H
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV CL,05H
MOV BL,0H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
142
LEA SI, ARRAY
UP: MOV AL, [SI]
CMP AL, BL
JC NEXT
MOV BL, AL
NEXT: INC SI
DEC CL
JNZ UP
MOV DL, BL
CMP DL,09H
JBE DOWN
ADD DL,07H
DOWN: ADD DL,30H
MOV AH,2
INT 21H
INT 3
CODE ENDS
END START
** F is displayed on the console after execution of the program

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
143
Example 21) Write an Assembly Language Program (ALP) to sort the
numbers in ascending and descending order.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
ARRAY DB 08H,02H,06H,01H
COUNT EQU 04H
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV CH, COUNT
AGAIN: MOV SI, OFFSET ARRAY
MOV CL, COUNT
BACK: MOV AL, [SI]
CMP AL, [SI+1]
JC LARGER
XCHG AL, [S+1]
MOV [SI], AL

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
144
LARGER: INC SI
DEC CL
JNZ BACK
DEC CH
JNZ AGAIN
INT 3
CODE ENDS
END START
OUTPUT: DESCENDING ORDER ASCENDING ORDER
08H 01H
06H 02H
02H 06H
01H 08H
Example 22) Write an Assembly Language Program (ALP) to sort the
numbers in ascending and descending order. Consider word data.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
ARRAY DB 8888H,2222H,6666H,1111H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
145
COUNT EQU 04H
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV CH, COUNT
AGAIN: MOV SI, OFFSET ARRAY
MOV CL, COUNT
BACK: MOV AX, [SI]
CMP AX, [SI+2]
JC LARGER / JNC FOR ASCEND
XCHG AX, [S+2]
MOV [SI], AX
LARGER: INC SI
INC SI
DEC CL
JNZ BACK

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
146
DEC CH
JNZ AGAIN
INT 3
CODE ENDS
END START
OUTPUT: DESCENDING ORDER ASCENDING ORDER
DS: 0000 8888 1111
0002 6666 2222
0004 2222 6666
0006 1111 8888
Example 23) Write an Assembly Language Program (ALP) to find factorial
of a number.
ASSUME CS: CODE, DS: DATA
DATA SEGMENT
NUM DB 04H
RESULT DW 01H DUP (0)
DATA ENDS
CODE SEGMENT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
147
START: MOV AX, DATA
MOV DS, AX
MOV AX, IH
MOV DI, OFFSET RESULT
MOV CX, NUM
BACK: MUL CX
DEC CX
JNZ BACK
MOV [DI], AX
MOV [DI+2], DX
INT 3
CODE ENDS
END START
OUTPUT: DS: 0000 0418 (4H= 4x3x2x1= 18H in Hex
DS: 0000 0424 (4=4x3x2x1=24 in decimal.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
148
Example 24) Write an Assembly Language Program (ALP) to find factorial
of a number by Procedure.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUM DB 04H
RESULT DW 01H DUP (0)
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AX, 1H
MOV DI, OFFSET RESULT
MOV CX, NUM
CALL FACT
INT 3
FACT PROC
BACK: MUL CX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
149
DEC CX
JNZ BACK
MOV [DI], AX
MOV [DI+2], DX
RET
FACT ENDP
CODE ENDS
END START
OUTPUT: DS: 0000 0418 (4H= 4x3x2x1= 18H in
DS: 0000 0424 (4=4x3x2x1=24 in decimal.
Example 25) Write an Assembly Language Program (ALP) to find LCM.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUMR DW 8H,2H
LCM DW 02H DUP (0)
DATA ENDS
CODE SEGMENT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
150
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET NUMR
MOV DI, OFFSET LCM
MOV AX, [SI]
MOV BX, [SI+2]
MOV DX,0H
DIVIDE: PUSH AX
PUSH DX
DIV BX /Follow division rule
CMP DX,0 /Check remainder for 0
JE RESULT
POP DX
POP AX
ADD AX, [SI]
JNC NEXT
INC DX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
151
NEXT: JMP DIVIDE
RESULT: POP [DI+2]
POP [DI]
INT 3
CODE ENDS
END START
** OUTPUT IN SEGMENT DS: 0000 0800
0002 0400
0004 0800
Example 26) Write an Assembly Language Program (ALP) to find LCM
by Factorial.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUMR DW 8H,2H
LCM DW 02H DUP (0)
DATA ENDS
CODE SEGMENT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
152
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET NUMR
MOV DI, OFFSET LCM
MOV AX, [SI]
MOV BX, [SI+2]
MOV DX,0H
CALL FACT
INT 3
DIVIDE: PUSH AX
PUSH DX
DIV BX
CMP DX,0
JE RESULT
POP DX
POP AX
ADD AX, [SI]

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
153
JNC NEXT
INC DX
NEXT: JMP DIVIDE
RESULT: POP [DI+2]
POP [DI]
RET
LCM ENDP
CODE ENDS
END START
** OUTPUT IN SEGMENT DS: 0000 0800 /Input No
0002 0400 /Input No
0004 0800 /LCM
Example 27) Assembly Language Program (ALP) to find GCD.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUM1 DW 38H
NUM2 DW 06H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
154
RESULT DW 01 DUP (0)
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV AX, NUM1
MOV BX, NUM2
MOV DI, OFFSET RESULT
CMP AX, BX
JE GCD
JC EXCHANGE
DIVIDE:MOV DX,0 / for ramainder
DIV BX
CMP DX,0 /Check remainder for 0
JE GCD /If 0, GCD
MOV AX, DX /Else Exchange for next division
EXCHANGE: XCHG AX, BX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
155
JMP DIVIDE
GCD: MOV [DI], BX /Result in BX, brought to DI
INT 3
CODE ENDS
END START
*** Result
1) 6)38(6 DS: 0000 3800
36 0002 06
----- 0003 0002
2)6(3
6
------
0 [2 is the GCD]
Result in Registers:
AX=38 and BX=6
For the First division:
AX/BX= 38/6 = 2 as remainder.
This division gives: AX= 6, BX= 6 And DX= 2.
For the second division:
AX becomes 6 and BX has 2, then
AX/BX = 6/2 = 0, remainder is 0. Hence GCD is 2.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
156
Example 28) Assembly Language Program (ALP) for positive and negative
numbers.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
LIST 0049H, 0032H, 0012H, 1234H
COUNT EQU 4H
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET LIST
MOV CX, COUNT
MOV BX,0 / For positive numbers
MOV DX,0 / For negative numbers
AGAIN: MOV AX, [SI]
SHL AX,01H / Rotate & Shift with
/ respect to accumulator
JC NEGATIVE

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
157
INX BX / Get positive number
JMP NEXT
NEGATIVE: INC DX / Get negative number
INC SI
INC SI
DEC CX
JNZ AGAIN
INT 3
CODE ENDS
END START
*** After rotate & shift if, the last bit (cy flag) of the number shows 1,
then result is negative number else it is positive number.
Example 29) Write an Assembly Language Program (ALP) to find square
of a number using Macro.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUM DB 05H
RESULT DB?

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
158
DATA ENDS
CODE SEGEMNT
SQUARE MACRO
MUL BL
MUL BL
MOV [DI], AL
ENDM
START: MOV AX, DATA
MOV DS, AX
MOV DI, OFFSET RESULT
MOV AL,01
MOV BL, NUM
SQUARE
INT 3
CODE ENDS
END START
*** Result is in segment DS: 0000 0519 / 25=19 IN HEX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
159
Example 30) Write an Assembly Language Program (ALP) to display a
string.
** String always of byte size as are all in ASCII charecters.
DATA SEGEMNT
ASSUME CS: CODE, DS: DATA
TEXT DB ‘MICROPROCESSOR BOOK FOR BEGINERS$’
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV DX, OFFSET TEXT /String must be loaded into DX
MOV AH,9H
INT 21H
INT 3
CODE ENDS
END START

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
160
*** The text ‘MICROPROCESSOR BOOK FOR BEGINERS$ is displayed
on the console after program execution. The dollar sign ‘$’ indicates end of the
string. The following pair of Instruction are used to display the string.
MOV AH,9H
INT 21H
One can change the string like one’s name or for that matter any name
which can then be seen displayed on the console.
Example 31) Write an Assembly Language Program (ALP) to display a
string using MACRO.
ASSUME CS: CODE, DS: DATA
DATA SEGEMNT
MSG DB ‘SUGGESSTIONS ARE WELCOME$’
DATA ENDS
CODE SEGMENT
DISP MACRO
MOV AH,9H
INT 21H
ENDM

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
161
START: MOV AX, DATA
MOV DS, AX
MOV DX, OFFSET MSG
DISP
MOV AH,4CH
INT 21H
CODE ENDS
END START
*** The text is displayed on the console after program execution.
*** The text ‘SUGGESSTIONS ARE WELCOME ’is displayed on the
console after program execution. The dollar sign ‘$’ indicates end of the
string.
The following pair of Instruction are used to display the string and can be
incorporated as Macro.
MOV AH,9H
INT 21H
One can display any on the console.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
162
Example 32) Write an Assembly Language Program (ALP) to get Fibonacci
series.
ASSUME CS: CODE, DS:DATA
DATA SEGEMNT
NUM DB 0AH
RESULT DW?
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET RESULT
MOV AX,0
MOV BX,1
MOV CX, NUM
BACK; ADD AX, BX
DAA
MOV [SI], AX
MOV AX, BX

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
163
MOV BX, [SI]
INC SI
DEC CX
JNZ BACK
MOV AH,4CH
INT 21H
CODE ENDS
END START
***result in segment DS: 0000 0102
0002 0305
0004 0813
0006 2134
0008 55
0009 89
**ANOTHER WAY OF WRITING THE PROGRAM
. MODEL SMALL
.DATA
RESULT DB?

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
164
NUM DB OAH
. CODE
START: MOV AX, @DATA
MOV DS, AX
LEA SI, RESULT
MOV CL, NUM
MOV AX,0
MOV BX,1
BACK: ADD AX, BX
DAA
MOV [SI], AX
MOV AX, BX
MOV BX, [SI]
INC SI
DEC CL
JNZ BACK
INT 3

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
165
CODE ENDS
END START
Example 33) Write an Assembly Language Program (ALP) to get Fibonacci
series with procedure.
ASSUME CS: CODE, DS:DATA
DATA SEGEMNT
NUM DB 0AH
RESULT DW?
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET RESULT
MOV AX,0
MOV BX,1
MOV CL, NUM
CALL FIBO
INT 3

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
166
FIBO PROC NEAR
BACK: ADD AX, BX
DAA
MOV [SI], AX
MOV AX, BX
MOV BX, [SI]
INC SI
DEC CL
JNZ BACK
RET
FIBO ENDP
CODE ENDS
END START
***result in segment DS: 0000 0102
0002 0305
0004 0813
0006 2134
0008 55
0009 89

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
167
Example 34) Write an Assembly Language Program (ALP) to add two 4-
digit BCD numbers.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
NUMLIST DW XXXXH, YYYYH
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV SI, OFFSET NUMLIST
MOV CL,00H /For carry
MOV AX, [SI] /First BCD no in AX
MOV BX, [SI+2] /Second BCD no in BX
ADD AL, BL /First LSB then MSB
DAA /Decimal Adjust
MOV DL, AL /LSB result in DL
MOV AL, AH /MSB in AL
ADD AL, BH

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
168
DAA
MOV DH, AL /MSB result in DH
JNC DOWN
INC CL
DOWN: MOV [SI+4], DX
MOV [SI+6], CL
INT 3
CODE ENDS
END START
***RESULT IN DX REGISTER WHICH CAN BE SEEN REFLECTED
IN MEMORY.
Example 35) Write an Assembly Language Program (ALP) to add two
matrices.
ASSUME CS: CODE, DS:DATA
DATA SEGMENT
MAT1 DB XXH, XXH, XXH, XXH….. /elements
MAT2 DB YYH, YYH, YYH, YYH…./ elements

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
169
SMAT DB ZZH /element count
DATA ENDS
CODE SEGMENT
START: MOV AX, DATA
MOV DS, AX
MOV SI, MAT1
MOV DI, MAT1
LEA BP, SMAT
MOV CX, COUNT
LOOP1: XOR AX, AX
XOR BX, BX
MOV AL, [SI]
MOV BL, [DI]
ADD AL, BL
MOV [BP], AX
ADD BP, 02H
INC SI

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
170
INC DI
DEC CX
JNZ LOOP1
INT 3
CODE ENDS
END START
7.3 Sample Intriguing Questions
1) What is the result of
NOT AX
ADD AX,1
ANS: - Result is 2’complwement of number in AX.
2) What is wrong with a) MOV BL, CX b) MOV DS, SS
ANS: -a) SYNTAX ERROR as for transfer of DATA, DATA SIZES must
be same.
b) SYNTAX ERROR as no memory to memory data transfer is possible
directly.
3) What is the result of CX, 7H
ANS: - CX=0007→CL=07 & CH=00

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
171
4) What is the result of XRA BX, BX
ANS: - REGISTER BX IS CLEARED. BX=0000
5) What is the required to mask LSB of AL=04H
ANS: - To mask AND LOGIC is used with required data. Here data
required is 00.
6) What happens when MUL BX is executed
ANS: - When this instruction is executed AX contains the SUM & DX
contains the carry.
7) What is the result of
ADD AL, BL
DAA
If AL=63, BL=19
ANS: - The result will be adjusted for decimal as:
63→ 0110 0011
+19→+0001 1001
------------------------------------
82→ 0111 1100→7C /Hence 6 is ADDED by DAA
+0000 0110→82
8) Negative numbers are represented by 2’cpmplement (T/F)
ANS: - True.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
172
9) Explain pipelining in 8086
ANS: - Pipelining is a technique which executes instruction fetch and
execution mechanism in parallel. To speed up program execution, the BIU
fetches as many as six instruction bytes (size of instruction queue is 6) ahead
of time from memory. While executing one instruction other instruction can
be fetched avoiding waiting time for execution unit to receive other
instruction. BIU stores the fetched instructions in a six level deep FIFO.
The BIU fetches the instructions bytes while the EU decodes and executes
the instructions. This improves overall speed of the processor.
10) What is the difference between the physical and the logical
address?
ANS: -The physical address is 20 bits long and corresponds to the actual
binary code output by the BIU on the address bus lines. The logical address
is an offset from location 0 of a given segment.
11) List the Advantages of memory segmentation in 8086
ANS: -
• Instruction and data are not overlapped.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
173
• Dynamic relocatability of program
• Time sharing is possible.
• Sharing of data between processors.
• Extension of addressability of processor
• Programs and data are stored separately
12) Write flow for Creating Macro Procedures
ANS: -Macro procedure is created by using the MACRO name, ENDM
directives and the instruction in between the two:
Name of MACRO
Instructions
ENDM
Once a macro is defined it can be anywhere in the program by using its
name.
13) Logic calculations are done in which type of registers?
ANS: -Accumulator is the register in which Arithmetic and Logic
calculations are done.
14) What does microprocessor speed depend on?
ANS: -The processing speed depends on DATA BUS WIDTH.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
174
15) List the segments, Registers and their offsets
ANS: -
Segment Offset Registers Operation
CS IP Points towards Address of next instruction
DS BX, SI and DI Points towards address of data
SS SP, BP Points towards address on stack
ES BX, SI and DI Points towards address of data (used for string
operations)
16) List out MASM reserved words.
ANS: - The reserved words are:
ASSUME declare segments used in program
SEGMENT declare the segment
CODE begin code segment
DATA begin data segment
ENDS end of segment
END program end
SEG locate segment

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
175
DS define storage
DB define byte
DW define word
DD define double word
DQ define quad word
DUP duplicate
ELSE loop statement
PROC define procedure
ENDP end procedure
MACRO define macro
ENDM end macro
EQU equate (for constants)
IF loop statement
ENDIF end if statement
FAR reference for far address
MODEL type of program

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
176
NEAR reference for near address
OFFSET offset value
ORQ origin address for program
PARA paragraph
EXIT exit from the code
PUBLIC reference for public data
PTR pointer

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
177
CHAPTER-8
8051 HARDWARE DESCRIPTION AND CONCEPTS
8.1 8051 FEATURES
1. Evolution year 1970-71 by Texas Instruments but, 8051. microcontrollers
brought in by Intel in the year 1980.
2. It was the first 8-bit microcontroller.
3. It is accessible as 40-pin Dual-Inline-Package (DIP).
4. It is accessible in three variants depending on ROM
a. 8031 (No ROM)
b. 8051 (4K ROM)
c. 8052 (8K ROM)
5. It has 8 bit data and 16 bit address lines.
6. 4K bytes of internal ROM as Program Memory and 128 bytes of RAM
as Data Memory with 64K external Code and Data Memory Space.
7. Four Memory banks each of 8 bits (00-1F) 32 bytes as working
registers. Bank 1 works as stack.
8. Pipelined architecture.
9. One serial Interface.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
178
10. 8-bit ALU and 32 General Purpose Registers.
11. Has 6 interrupts, 3 Internal and 2 External along with one reset.
12. Two 16 bit Timer Interrupt and four 8 bit ports.
8.2 8051 ARCHITECTURE
Figure 8.1: 8051 architecture
• ALU 8 BITS
REGISTERS
• A 8 BIT

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
179
• B 8 BT
• R0-R7 8 BIT (4 BANKS: 4X8=32)
• SP 8 BITS. On reset it shows 07H (Bank 2) and loads from
08H. Builds from 00H-FFH. SP always shows BANK 2.
• PC 16 BIT (0000H-FFFFH) but, ROM is 4K (0000H-0FFFH)
rest is external.
• SFRS 8 BIT/16 BIT (Timer/ Counter, Interrupt, Port &
Communication Registers)
• PSW 8 BIT
• DPTR 16 BITS. It is used to access external ROM/RAM along
with MOVC/ MOVX instructions. Can be of 8 BIT (DPH & DPL).
• PROGRAM AND DATA MEMORY.
8051 is an 8-bit microcontroller and is built with 40 pins DIP (dual inline
package), 4kb of ROM and 128 bytes of RAM, 2 16-bit timers, four
parallel 8-bit programmable and addressable ports. It has an on-chip
crystal oscillator which gives operating crystal frequency of 12 MHz
Architecturally the system bus connects on chip devices to the CPU. The

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
180
system bus consists of an 8-bit data bus, 16-bit address bus and bus
control signals. The system bus interfaces all the on chip devices like
program memory, ports, data memory, serial interface, interrupt control,
timers, and the CPU.
8.3 8051 REGISTER ARCHITECTURE
It consists of 256 bytes of RAM memory, which is divided into two ways,
such as 128 bytes for general purpose and 128 bytes for special function
registers (SFR) memory. The memory which is used for general purpose
is called as RAM memory, and the memory used for SFR contains all the
peripheral related registers like Accumulator, ‘B’ register, Timers or
Counters, and interrupt related registers.
The general purpose memory is called as the RAM memory of the 8051
microcontroller, which is divided into 3 areas such as banks, bit-
addressable area, and scratch-pad area. The banks contain different
general purpose registers such as R0-R7, and all such registers are byte-
addressable registers.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
181
Banks and Registers
Figure 8.2: 8051 Register architecture
The B0, B1, B2, and B3 are register memory banks and each bank contains
eight general purpose registers from ‘R0’ to ‘R7’. All these registers are
byte-addressable registers. These banks are selected by the Program Status
Word (PSW) register.
PSW (Program Status Word) Register
The PSW register is a bit and byte-addressable register. This register
reflects the status of the operation that is carried out in the controller.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
182
Register memory banks are selected by the PSW register bits RS1 and
RS0.
C ----- AC RS1 RS0 OV ----- P
D7 D6 D5 D4 D3 D2 D1 D0
Figure 8.3: PSW format of 8051
Carry Flag (C): This carry flag is affected when the bit is generated from
the 7th position.
Auxiliary Flag (AC): This auxiliary carry is affected when a bit is
generated from the 3rd position to the 4th position.
Overflow Flag (OV): Overflow flag is set when a bit is generated from
the 6th position to the 7th position.
Parity Flag (P): This flag is set when parity while adding is 1
else reset.
RS1 and RS0
The RS1 and RS0, the bits in PSW register, are used to select different
memory location from Bank0 to Bank4 in the RAM memory.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
183
Special Function Registers (SFR)
Special function registers are from the upper RAM. The registers include all
peripheral related registers like P0, P1, P2, P3, timers or counters, serial port and
interrupts-related registers. The SFR memory address starts from 80h to FFh.
The SFR register is implemented by bit-address registers and byte-address
registers.
SFRs and addresses
Register Address Register Address
P0 80 P2 A0
SP 81 E1 A8
DPL 82 P3 B0
DPH 83 IP B8
PCON 87 TCON2 C8
TCON 88 TMOD2 C9
TMOD 89 RCAP2L CA
TL0 8A RCAP2H CB
TL1 8B TL2 CC
TH0 8C TH2 CD
TH1 8D PSW D0
P1 90 A E0
SCON 98 B F0
SBUF 99

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
184
Accumulator
The accumulator which is also known as ACC or A is a bit as well as a
byte-addressable register. The accumulator holds the results of most
Arithmetic and logical operations.
B-Register
The B-register is a bit and byte-addressable register. The B register is only
used for multiplication and division operations.
Port Registers
The 8051 microcontroller consists of 4-input and output ports (P0, P1, P2,
and P3) or 32-I/O pins.
Counters and registers
The timers are used to generate precious time delay and the source for the
timers is crystal oscillator. The counters are used to count the number of
external events. The 8051 microcontroller consists of two 16-bit timers
and counters such as timer 0 and timer 1. Both the timers consist of a 16-
bit register in which the lower byte is stored in the TL and the higher byte
is stored in the TH. The Timer can be used as a counter as well as for

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
185
timing operation that depends on the source of the clock pulses to the
counters. The Counters and Timers in 8051 microcontrollers contain two
special function registers TMOD and TCON which are used for activating
and configuring timers and counters.
8.4 8051 HARDWARE PIN DIAGRAM
Figure 8.4: 8051 PIN diagram

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
186
PORT1 (PIN 1- 8) Can be used either as Input or Output Port. Logic 1
makes it input port and logic 0 makes it output port.
RESET (PIN 9) Reset is treated as an Interrupt. On reset all ports are
programmed as input ports.
PORT3 (PIN 10-17) These pins dual-function Pins and are used in serial
communication, interrupts and read and write operations.
XTAL1, 2 (PIN 18-19) Oscillator pins connected to external oscillator to
generate required clock pulse of operation.
VSS (PIN 20) Power supply. As ground and supply.
PORT2 (PIN 21-28) Can be configured as Input Output Pins multiplexed with
high order address bus (A8 to A15).
PSEN (PIN 29) Program Store Enable Low, used to enable external ROM
ALE (PIN 30) Address Latch Enable, used to distinguish between
multiple memory chips.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
187
EA (PIN 31) External Access low), If high Internal (4K) ROM is selected
and if low external ROM (64K) is selected.
PORT0 (PIN 32-39) It is bidirectional port and used for multiplexing low order
address and data bus with the help of ALE signal. When ALE is 1 this port is
used as data bus and when the ALE pin is at 0 the port is used as a lower order
address bus (A0 to A7).
VCC (PIN 40) Power supply

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
188
CHAPTER-9
8051 SOFTWARE DESCRIPTION AND CONCEPTS
The programmer in order to communicate with the intelligent device must
first learn its language. The language so built has instructions of different
types which defines functions to be carried out by the device.
9.1 8051 NSTRUCTION SET
8051 supports the following types of instruction set:
• Data Transfer Instructions
• Arithmetic Instructions
• Logical Instructions
• Bit Manipulation Instructions
• Program Branching Instructions

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
189
DATA TRANSFER NSTRUCTIONS
MOV, PUSH, POP, XCH, XCHD, MOVC, MOVX are the
instructions under this category and can be remembered easily with
respect to data accessing:
• MOV DPTR, #DATA 16 BIT
** # for immediate data
• MOV A, Rn/ or #DATA/ or @Ri/ or DIRECT
** @ for indirect & Ri for internal RAM locations (0-255) pointed by R0
& R1.
• MOV Rn, A/ or #DATA/ or DIRECT
** / Rn for register banks where n =0-7
• MOV DIRECT, A/ or Rn/ or @Ri/ or DATA/ or
DIRECT
• MOV @Ri, A/ or DIRECT/ or #DATA
• MOVC A, @A+DPTR
• MOVC A, @A+PC / C stands for code.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
190
• MOVX A, @Ri /X stands for data (16 bit)
• MOVX A, @DPTR / DPTR for accessing external RAM
or ROM Memory.
• MOVX @Ri, A
• MOVX @ DPTR, A
• PUSH DIRECT
• POP DIRECT
• XCH A, Rn/ or DIRECT/ or Ri
** PUSH & POP are used only by direct addressing.
** Register sizes must be same.
** Rn to Rn (memory to memory data transfer not possible)
ARITHMATIC INSTRUCTIONS
ADD, ADDC, SUBB, INC, DEC, MUL, DIV, DA A are the
instructions which can be remembered easily with respect to data
accessing:

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
191
• ADD A, Rn/ or DIRECT/ or #DATA/ or @Ri
• ADDC A, Rn/ or DIRECT/ or #DATA/ or @Ri
• SUBB A, Rn/ or DIRECT/ or #DATA/ or @Ri
• INC A / or Rn/ or DIRECT/ or @Ri/ or DPTR
• DEC A / or Rn/ or DIRECT/ or @Ri/ or DPTR
• MUL AB
• DIV AB
• DA A
** Multiplication & Division with respect to A & B registers only.
** Arithmetic and Logical Manipulations are only with Accumulator A.
LOGICAL INSTRUCTIONS
ANL, ORL, XRL, CLR, CPL, RL, RLC, RR, RRC, SWAP are the
instructions which can be remembered easily with respect to data
accessing:
• ANL A, Rn/ or #DATA/ or DIRECT/ or @Ri
• ANL DIRECT, A/ or #DATA

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
192
• ORL A, Rn/ or #DATA/ or DIRECT/ or @Ri
• ORL DIRECT, A/ or #DATA
• XRL A, Rn/ or #DATA/ or DIRECT/ or @Ri
• XRL DIRECT, A/ or #DATA\
• CLR A
• CPL A
• RL A
• RLC A
• RR A
• RRC A
• ANL C BIT
• ANL C, BIT
• ORL C, BIT
• ORL C, BIT
• MOV C, BIT
• MOV BIT, C
• SWAP A

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
193
BIT MANIPULATION INSTRUCTIONS
CLRC, SETB, CPL, ANL, ORL are the instructions which are carried
out with respect to carry or with bit.
• CLR C
• CLR BIT
• SETB C
• SETB BIT
• CPL C
• CPL BIT
PROGRAM BRANCHING INSTRUCTIONS
JUMP INSTRUCTIONS
• SJMP (WITHIN 256 BYTES)
• AJMP (WTHIN 2K)
• LJMP (WITHIN 64K)
• JZ/ JNZ

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
194
• JC/JNC
• JB/JNB
• DJNZ/DJNE/CJNE/CJNZ/NOP
** All conditional JUMPS are SHORT Jumps.
CALL & RETURN INSTRUCTIONS
• ACALL (WITHIN 2K)
• LCALL (WITHIN 64K)
• RET
• RETI
9.2 8051 ADDRESSING MODES
Methods of accessing operands are addressing modes. The various
modes are:
• Register addressing
• Immediate addressing
• Direct addressing
• Indirect addressing
• Indexed addressing

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
195
Register Addressing Mode
The various registers used are R0- R7 from selected banks (B0-B3),
A, B, PC, and DPTR.
It is accessing of operands for register to register.
** Sizes of registers must match
** A to Rn and Rn to A accessing is possible
** Rn to Rn accessing is not possible.
1) MOV A, R0
2) ADD A, R7
3) MOV DPL, R7
Immediate Addressing Mode
The sign # is used for the addressing. Source is the immediate data
used to load any register.
1) MOV DPTR, #2550H
2) ADD A, #50H
3) MOV R1, #22H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
196
Direct Addressing Mode (Memory Addressing)
Address of operand is provided in the instruction. Direct addressing
is for 128 bytes of RAM (00-7FH) and SFR (80-FFH).
1) MOV A, 4 Which is equivalent to MOV A, R4
2) ADD A, 0 Which is equivalent to MOV A, R0
** Stack instructions use direct addressing mode.
3) PUSH 0E0H / Address of A is 0E0H
4) POP 0F0H / Address of B is 0F0H
Indirect Addressing Mode (Memory Addressing)
** R0 and R1 are used as memory pointers.
** @ sign is used for addressing.
1) MOV A, @R0
2) MOV @R0, A
** Addressing with respect to accumulator (A) only.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
197
Indexned Addressing Mode (Memory Addressing)
** DPTR instruction along with MOCX and MOVC instructions is used.
** Addressing with respect to A only.
** Code space can be shared between code and data but, data space cannot
be shared.
** MOVX is for data segment
** MOVC for code segment.
1) MOVC A, @A+DPTR
2) MOVX A, @A+DPTR
3) MOVX @Ri, A

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
198
CHAPTER- 10
PROGRAMMING 8051
10.1 PROGRAMMNG STEPS
➢ Write down initialization instructions.
➢ Write down the initialization instructions
➢ Write down the operational instructions
➢ Write down the conditional instructions
➢ Write down the result display instructions
➢ Write instruction to stop the process
10.2 ASSEMBLER DIRECTIVES
Certain pseudo instruction are required to be furnished by the programmer
to the assembler and these pseudo instructions are for the data sizes,
constants, labels, macros, subroutines etc. The directives which are used
extensively are: ORG, DB, EQU, END and START.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
199
CONCEPTS
➢ The only directive which is used for data size is DB, since it handles
only 8 bits.
➢ A zero must be placed before a hex number that starts with a letter
(A-F) otherwise the assembler treats it as a label but not as a
numeric number.
➢ A constant in a program like counter is to be declared by using EQU
(equals) directive with label for the directive.
➢ A programmer must begin the program by writing instructions in
the code segment by using START directive and after instruction
writing he must end the program by writing ENDS directive, e.g.
➢ The procedures are called by the directives LABEL PROC NEAR
or LABEL PROC FAR followed by LABEL ENDP NEAR or
LABEL ENDP FAR.
➢ Procedures are called after end of the code.
➢ The Micros are called in the program by using LABEL MACRO
followed by LABEL ENDM directives.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
200
➢ Macros are called before code starts.
10.3 INTERRUPTS
8051 supports 5 vectored interrupts; vectored means having addresses and
those are:
• External Interrupt 0
• External Interrupt 1
• Timer/Counter Interrupt 0
• Timer/Counter Interrupt 1
• Serial Port Interrupt
** RESET is also considered as an interrupt; when executed 8051 resets to all
0000H.
** The addresses and priorities are as follows:
External Interrupt 0 IE0 0003H
Timer/Counter 0 TF0 000BH
External Interrupt 1 IE1 0013H
Timer/ Counter 1 TF1 001BH
Serial Port RI & TI 0023H
** Each Interrupt requires 8 bytes of locations.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
201
10.4 PROGRAMMING CONCEPTS
• In all arithmetic and logical operations destination is A.
• Multiplication and division operations are with respect to
registers AB only.
• Rn to Rn operations are not possible.
• Register sizes must be same
• # sign is used for immediate data
• @ sign is used for indirect access of data.
• R2 register is always used as a counter.
• R0 & R1 registers are always used as pointers.
• On reset SP always points towards bank2.
• DPTR is used to access external ROM/RAM
• External memory accessing is through A only.
• Direct addressing is used for PUSH & POP instructions
• Swap, rotate, clear, complement and decimal adjustment
operations are with respect to register A only.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
202
10.5 PROGRAMMING EXAMPLES
Example 1) Write an 8051 program to move 5 data bytes from RAM
location starting at 40H to RAM location starting at 55H.
ORG 0H
MOV R0, # 40H / SOURCE
MOV R3, # 55H /DESTINATION
MOV R2, #05H / COUNT FOR 10 DATA
BACK: MOV A, @R0
MOV @R3, A
INC R0
INC R3
DJNZ R2, BACK
END
RESULT
INPUT OUTPUT
40H 00H 55H 00H
41H 01H 56H 01H
42H 02H 57H 02H
43H 03H 58H 03H
44H 04H 59H 04H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
203
Example 2) Ten data bytes are stored from RAM locations 45H to 54H.
Add 02H to each of them and place result in RAM locations 79H to 70H.
ORG 0H
MOV R0, # 45H
MOV R1, #79H
MOV R2, #0AH
MOV A, @R0
ADD A, #02H
BACK: MOV @R1, A
INC R0
DEC R1
DJNZ R2, BACK
END
RESULT: INPUT OUTPUT
45H 01H 79H 03H
46H 02H 78H 04H
47H 03H 77H 05H
48H 04H 76H 06H
49H 05H 75H 07H
50H 06H 74H 08H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
204
51H 07H 73H 09H
52H 08H 72H 0AH
53H 09H 71H 0BH
54H 0AH 70H 0CH
Example 3) Write 8051 program to place a number 55H in internal RAM
30H to 33H Use a register to hold the number.
ORG 0H
MOV A, #55H
MOV R0, #30H
MOV R2, #04H
BACK: MOV @R0, A
INC R0
DJNZ R2, BACK
END
RESULT: INPUT 55H
OUPUT
30H 55H
31H 55H
32H 55H
33H 55H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
205
Example 4) Write 8051 program to push R5, R6 and A onto the stack and
then pop them into R2, R3 and B.
PUSH 05
PUSH 06
PUSH 0E0
POP 0F0
POP 02
POP 03
Example 5) Write 8051 program to find sum of first 10 natural numbers.
MOV A, #00H
MOV R2, #0AH
MOV R0, #0H
BACK: ADD A, R0
INC R0
DJNZ R2, BACK
END

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
206
Example 6) Write 8051 program for basic arithmetic operations.
ORG 0H
MOV DPTR, #8000H
MOV A, #02H
MOV B, #02H
ADD A, B
MOV @DPTR, A
MOV A, #02H
MOV B, #02H
SUBB A, B
INC DPTR
MOV @DPTR, A
MOV A, #02H
MOV B, #02H
MUL AB
INC DPTR
MOV @DPTR, A
MOV A, #02H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
207
MOV B, #02H
DIV AB
INC DPTR
MOV @DPTR, A
END
RESULT:
INPUT 02H, 02H
OUTPUT
8000H 04H
8001H 00H
8002H 04H
80003H 01H
Example 7) Write 8051 program to check whether RAM location 37H
contains an even number. If so, send it to port 2 else make it even and then
send it to port 2.
ORG 0H
MOV A, #37H
JNB ACC.0, yes

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
208
CPL A
Yes: MOV P2, A
END
Example 8) Write 8051 program to convert packed BCD number to two
ASCII numbers and place them in R2 and R6. Register A has the BCD
number.
ORG 0H
MOV A, #BCD NO / No 29
MOV R7, A
ANL A, #0FH / 09
ADD A, #30H / 39
MOV R6, A / R6=39
MOV A, R7 / 29
ANL A, 0F0H / 20
RR A
RRA
RR A

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
209
RR A / 02
ADD A, #30H / 32
MOV R2, A / R2=30
END
Example 9) Write 8051 program to OR the contents of P1 & P2 put the
result in external RAM locations 0102H.
ORG 0H
MOV A, P1
MOV R1, A
MOV A, P2
ORL A, R1
MOV DPTR, #0102H
MOVX @A+DPTR, A
END
RESULT INPUT
P1 = 02H
P2 = 02H
OUTPUT
0102H = 04H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
210
Example 10) Write 8051 program to mask all the bits of a data FFH and
mask only lower nibble of data 0FFH.
ORG 0H
MOV A, #0FFH / A= FFH
ANL A, #00H / A= 00H
MOV B, A / B= 00H
MOV A, #FFH / A = FFH
ANL A, #0FH /A =0FH
END
Example 11) Write 8051 program to find smaller/ larger number from an
array.
Org 0h
mov r3, #06h / array of 6
mov dptr, #8000h
movx a, @dptr
mov r1, a
next: inc dptr
movx a, @dptr
clr c
mov r2, a

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
211
subb a, r1
jc skip / jnc for smaller
mov a, r2
mov r1, a
skip: djnz r3, next
mov dptr, #8062h
mov a, r1
movx @dptr, a
end
RESULT:
SMALLER 00H
LARGER 06H
Example 12) Write 8051 program to sort the numbers.
Org 0h
mov r0, #04h / array of 4
loop1: mov dptr, #8000h
mov r1, 04h
loop 2: movx a, @dptr
mov b, a

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
212
inc dptr
movx a, @dptr
clr c
mov r2, a
subb a, b
jc no exchange
mov a, b
movx @dptr, a
dec dpl
mov a, r2
movx @dptr, a
inc dptr
no exchange: djnz r1, loop2
djnz r0, loop1
end
RESULT: INPUT OUTPUT
8000H 03H 8000H 01H 8000H 0FH
8001H 08H 8001H 03H 8001H 08H
8002H 01H 8002H 08H 8002H 03H
8003H 0FH 8003H 0FH 8003H 01H

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
213
Example 13) Write 8051 program for BCD addition.
ORG 0H
MOV DPTR, #8000H
MOV R0, #37H
MOV R1, #34H
MOV R2, #38H
MOV R3, #43H
CLR C
MOV A, R0
ADD A, R2
DA A
MOVX @DPTR, A
MOV A, R1
ADDC A, R3
DA A
INC DPTR
MOVX @DPTR, A
END

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
214
Example 14) Write 8051 program to find number of 1s in a given number
FFH
ORG 0H
MOV R1, #00H / COUNT FOR 1
MOV R2,08H / COUNTER FOR ROTATE
MOV A, #FFH / NUMBER IN A
LOOP: RLC A
JNC NEXT
INC R1
NEXT: DJNZ R2, LOOP
END
RESULT
INPUT FFH OUTPUT 08H
Example 15) Register A contains data 54H. Write 8051 program swap the
number by using SWAP instructions and rotate instruction.
WITH SWAP INSTRUCTION
ORG 0H
MOV A, #54H
SWAP A

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
215
WITHOUT SWAP BUT WITH ROTATE INSTRUCTION
ORG 0H
MOV A, #54H
RL A
RL A
RL A
RL A
RESULT: A CONTAINS SWAPPED DATA 45H.
10.6 OBJECTIVE WORKED EXAMPLES
1) The instruction MOV A, #554H is valid or invalid.
Ans: Invalid since register A size is of 8 bits and data is above 8 bits.
2) No value can be moved directly into registers R0-R7 in banks. (True/ False)
Ans: True since no direct memory to memory transfer is possible.
3) The instruction ADD R, R2 is valid or invalid. If so, correct it.
Ans: Invalid since in all arithmetic and logical instructions A must be a
destination. The correct set of instructions are:
MOV A, R1
ADD A, R2
4) The result of ADD A, SOURCE is in A (True/ False)
Ans: True since in all arithmetic and logical operations register A is the
destination.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
216
5) What is wrong in the instructions MUL A, R1 & DIV A, R1.
Ans: The instructions are invalid since all multiplication and division
operations are only with registers A & B.
6) What is the difference between MOV A, #5 H & MOV A, 5 instructions.
Ans: The instructions MOV A, #5H load immediate data 5 in A whereas the
instruction MOV A, 5 loads the data present in register R5 in A. One is immediate
addressing mode and the other is memory indirect mode.
7) RLC R1 instruction is valid or invalid.
Ans: The instruction is invalid since all rotate instruction must be with respect
to accumulator A.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
217
CHAPTER-11
BASIC SOFTWARES
11.1 8086-MASM (MICROSOFTS MICRO
ASSEMBLER)
ASSEMBLER
A program written by using high level language (by Humans) in
editor is converted into machine language (for Human-Machine
Interaction) known as binary language thereby giving an object code by
an assembler.
The assembler performs the functions such as:
Reads the source program
Creates a symbol table
Replaces Mnemonics by their binary codes
Gives out syntax errors
By assembling, correcting syntax errors, Linking and Debugging the program
can be executed by using MASM software.
The steps to execute the program by using MASM software are:
Write the program in high level language using editor

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
218
Save it by using .ASM extension (filename.asm)
Create a library file by using ML filename.asm
Link the object file by using link filename.obj
Debug the program by using filename.exe
DEBUG is step by step execution of a program. For single step debugging
T command is used till the end of the program and for at a time execution
INT 3 instruction is used. DEBUG displays the contents of all processor
registers after each instruction is executed. DEBUG utility contains
commands to display and modify memory, assembling and disassembling
of code, single step debugging by trace command for single and command
to execute multiple instructions, load registers with data etc.
To run the program, the following steps have to be followed:
C:/masm filename.asm
C:/ml filename.asm
C:/link filename.obj (enter 4 times)
C:/debug filename.exe (after this – appears)
__ g complete execution of program in single step.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
219
__ t Stepwise execution.
__ u un assemble (total code display)
__d starting address or ending address; To see data in memory
locations
__ q quit the execution.
11.2 EMULATOR
An emulator is hardware or software that enables host computer to behave
like another computer system referred to as guest system. An emulator runs
software or use peripheral devices meant for the guest system. Emulation is
the ability of a computer program in an electronic device to emulate another
program or device.
The various steps to execute a program by using Emulator are:
1 Click on the emu8086 Icon on Desktop. Click on new and select
the appropriate template. Here select .COM template.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
220
2 After that a window appears and one has to type the new program
from the line; add your code here
3 A sample program is typed as shown in the screen below:

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
221
4 Save the program, a window appears. The saved program must be
of .asm file.
5 Click on emulate, a screen appears. Go for a single step debugging
and one can see step by step execution along with changes in registers.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
222
6 For the typed sample program, the result 0AH can be seen in X
register.
11.3 8051-KEIL SOFTWARE STEPS
1. Click on the Keil uVision Icon on Desktop and one can see
the following screen.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
223
2. Click on the Project menu from the title bar and then click
on New Project.
3. Save the Project by giving a project name with no extension
4. Then Click on save button.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
224
5. Select the component for project. (Atmel or.)
6. Click on the + Symbol beside of Atmel
7. Select AT89C52 (or the one used) as shown below
8. Then Click on “OK”

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
225
9. The Following screen will appear
10. Then say “NO”
11. Now the project is ready for use
12. Double click on the Target1, one would get another option
“Source group 1” as shown in next page.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
226
13. Click on the file option from menu bar and select “new”
14. The next screen will be as shown in next page, and just
maximize it by double clicking on its blue boarder.
15. Write the program in either in “C” or “ASM”
16. For a program written in Assembly, save it with extension.
asm and for “C”, .C

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
227
17. Click on Source group 1 and click on “Add files to Group
Source”
18. A window appears with default “C” files.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
228
19. Select file extension given while saving the file
20. Click only one time on option “ADD”
21. Press function key F7 to compile. Correction must be done
for errors, if they appear and again F7 must be pressed.
22. If the file contains no error, then press Control+F5
simultaneously.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
229
23. The new window will appear as follows
24. Then Click “OK”
25. Click on the Peripherals from menu bar, and check required
port
26. Drag the port aside and click in the program file.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
230
27. Keep Pressing function key “F11” and observe the results.

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
231
INDEX
A
Accumulator 7, 59, 184
Address Lines 5, 59,177
Addressing Modes 26, 94, 194
ALE 10, 72, 186
Architecture 5, 57, 178
Arithmetic Instructions 29, 81, 190
Assembler 217
Assembler Directives 97, 198
B
Branch Instructions 32, 90, 193
B register 184
Bit Manipulation 93, 193
BSR Mode 51
C
Call Instructions 33,92,194

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
232
Counters 184
D
Data Transfer Instructions 28, 77, 189
Debugging 65, 217
Direct Addressing 27, 96, 199
Directives 97, 196
E
EA Pins 185
Execution Unit 57
Emulator 217
F
Features 2, 56, 175
Flag Register 7, 63
I
Instruction Pointer 62
Instruction Queue 62
Instruction Set 29, 76, 186

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
233
Interrupts 18, 103, 198
Indirect Addressing 27, 95, 196
Immediate Addressing 26, 95, 195
Interfacing 46
J
Jump Instructions 32, 90, 193
K
Keil software 222
L
Lock 74
Logical Instructions 30, 85, 191
M
Memory Organization 65
Memory Map 4
Macro 100

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
234
N
Number Conversion 83
P
Pin diagram 9, 48, 69, 185
Physical Address 68
Port Registers 184
PSW 181
Push & Pop 33, 79, 190
R
Register Architecture 59, 180
Register Addressing 27, 95,195
Reset 12, 71, 186
S
Segment Registers 60
SFR 183
String Instructions 89
Subroutine 100

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019
235
T
Trap 18, 65
X
XLAT 80
XTAL 186

MICROPROCESSOR & CONTROLLER BASIC CONCEPTS AND ILLUSTRATIONS Airo Publication | 2019

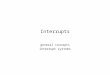




![Weeks 4-5 8088/8086 Microprocessor Programmingalkar/ELE414/dirz2005/w4-414-[2005].pdf · 8088/8086 Microprocessor Programming . 2 ... 80x86 Interrupts • An interrupt is an event](https://img.pdfslide.us/doc/110x75/5e70a945fb5d632d193db492/weeks-4-5-80888086-microprocessor-alkarele414dirz2005w4-414-2005pdf-80888086.jpg)