-
PROCEEDINGS OF THE IRE
CONCLUSION
The elliptic function transformation (1). is used herefor the
purpose of locating zeros and poles of a low-passfilter network
function. Charts of the type shown inFigs. 7 to 12 may be prepared
for any range of applica-tion whenever desired. The compactness of
the expres-sions that give the tolerance and other
characteristicquantities makes the preparation of these charts
whichrepresent a whole group of network functions withmany
singularities a matter of evaluating only a few
terms together with a few rational operations. Thesecharts,
after they are prepared, will be very helpful fordesign purposes.
For instance, if a required attenuationbeyond twice the cut-off
frequency must be greater than13 db, Fig. 10 indicates that a
filter function with thecharge arrangement of Fig. 3(b) and values
of a and cof 0.810 and 0.673 respectively will satisfy the
require-ment. The locations of all poles and zeros of this
filterare determined in the z-plane. The locations of zeros
andpoles in the s-plane may be found by applying the in-verse
transformation.
Feedback Theory -Further Properties of SignalFlow Graphs*SAMUEL
J. MASONt
Summary-A way to enhanceWriting gain at a glance.Dr. Tustin
extendedProof appended.Examples illustrativePray not
frustrative.
BACKGROUNDT HERE ARE many different paths to the solution
of a set of linear equations. The formal methodinvolves
inversion of a matrix. We know, how-
ever, that there are many different ways of inverting amatrix:
determinantal expansion in minors, systematicreduction of a matrix
to diagonal form, partitioninginto submatrices, and so forth, each
of which has itsparticular interpretation as a sequence of
algebraicmanipulations within the original equations. A
deter-minantal expansion of special interest is
D = >, alia2ja3k ... an (1)where amp is the element in the
mth row and pthcolumn of a) determinant having n rows, and the
sum-mation is taken over all possible permutations of thecolumn
subscripts. (The sign of each term is positiveor negative in accord
with an even or odd number ofsuccessive adjacent column-subscript
interchanges re-quired to produce a given permutation.) Since the
solu-tion of a set of linear equations involves ratios of
deter-minantal quantities, (1) suggests the general idea that
* Original manuscript received by the IRE, August 16,
1955;revised manuscript received, February 27, 1956. This work was
sup-ported in part by the Army (Signal Corps), the Air Force
(Office ofScientific Research, Air Research and Development
Command),and the Navy (Office of Naval Research).
t Dept. of Elect. Engrg. and Res. Lab. of Electronics,
M.I.T.,Cambridge, Mass.
a linear system analysis problem should be interpretableas a
search for all possible combinations of somethingor other, and that
the solution should take the form ofa sum of products of the
somethings, whatever they are,divided by another such sum of
products. Hence, in-stead of undertaking a sequence of operations,
we canfind the solution by looking for certain combinationsof
things. The method will be especially useful if thesecombinations
have a simple interpretation in the con-text of the problem.
aAb3tc --2
Fig. 1-An electrical network graph.
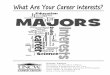
As a concrete illustration of the idea, consider theelectrical
network graph shown in Fig. 1. For simplicity,let the branch
admittances be denoted by letters a, b,c, d, and e. This particular
graph has three independentnode-pairs. First locate all possible
sets of three brancheswhich do not contain closed loops and write
the sum oftheir branch admittance products as the denominatorof
(2).
ab + ac + bc + bdabd + abe + acd + ace + ade + bcd + bce +
bde
Now locate all sets of two branches which do not form
920 July
Authorized licensed use limited to: Universidad Nacional
Autonoma de Mexico. Downloaded on October 22, 2008 at 17:44 from
IEEE Xplore. Restrictions apply.
-
Mason: Further Properties of Signal Flow Graphs
closed loops and which also do not contain any paths fromnode 1
to ground or from node 2 to ground. Write the sumof their branch
admittance products as the numerator ofexpression (2). The result
is the transfer impedancebetween nodes 1 and 2, that is, the
voltage at node 2when a unit current is injected at node 1. Any
imped-ance of a branch network can be found by this process.'So
much for electrical network graphs. Our main
concern in this paper is with signal flow graphs,2 whosebranches
are directed. Tustin3 has suggested that thefeedback factor for a
flow graph of the form shown inFig. 2 can be formulated by
combining the feedback loop
The purposes of this paper are: to extend the methodto a general
form applicable to any flow graph; topresent a proof of the general
result; and to illustratethe usefulness of such flow graph
techniques by applica-tion to practical linear analysis problems.
The proofwill be given last. It is tempting to add, at this
point,that a better understanding of linear analysis is a greataid
in problems of nonlinear analysis and linear or non-linear
design.
A BRIEF STATEMENT OF SOME ELEMENTARYPROPERTIES OF LINEAR
SIGNAL
FLOW GRAPHSa b c d e f g
* 9- t a, t 0 t PI t PI t t PI eK)jh
Fig. 2-The flow graph of an automatic control system.
gains in a certain way. The three loop gains areT,= bchT2= cdiT3
=
and the forward path gain isGo= abcdefg.
A signal flow graph is a network of directed brancheswhich
connect at nodes. Branch jk originates at node jand terminates upon
node k, the direction from j to kbeing indicated by an arrowhead on
the branch. Eachbranch jk has associated with it a quantity called
thebranch gain gjk and each node j has an associated quan-tity
called the node signal xi. The various node signals(3a) are related
by the associated equations
(3b)(3c)
A X jg1k = Xk,i
k = 1, 2, 3,
The graph shown in Fig. 3, for example, has equations
(4)The gain of the complete system is found to be
[1- (Ti + T2)](1 - T3) (5)and expansion of the denominator
yields
Go .~~~~(6)1-(Ti + T2+ T3)+ (T1T3+ T2T3)Tustin recognized the
denominator as unity plus thesum of all possible products of loop
gains taken one ata time (T1+T2+Ts), two at a time,
(T1T3+T2T3),three at a time, and so forth, excluding products
ofloops that touch or partially coincide. The productsT1T2 and
T1T2T3 are properly and accordingly missingin this particular
example. The algebraic sign alter-nates, as shown, with each
succeeding group of products.
Tustin did not take up the general case but gave ahint that a
graph having several different forward pathscould be handled by
considering each path separatelyand superposing the effects.
Detailed examination of thegeneral problem shows, in fact, that the
form of (6)must be modified to include possible feedback factors
inthe numerator. Otherwise (6) applies only to thosegraphs in which
each loop touches all forward paths.
1 Y. H. Ku, "Resume of Maxewll's and Kirchoff's rules for
net-work analysis," J. Frank. Inst., vol. 253, pp. 211-224;
March,1952.
2 S. J. Mason, "Feedback theory-some properties of signal
flowgraphs," PROC. IRE, vol. 41, pp. 1144-1156; September,
1953.
3 A. Tustin, "Direct Current Machines for Control Systems,"The
Macmillan Company, New York, pp. 45-46, 1952.
ax, + dx3 = X2bx2 + fx4 = X3eX2 + Cx3 = X4
gX3 + hx4 = X5.We shall need certain definitions. A source is a
node
having only outgoing branches (node 1 in Fig. 3). Asink is a
node having only incoming branches. A pathis any continuous
succession of branches traversed inthe indicated branch directions.
A forward path is apath from source to sink along which no node is
encoun-tered more than once (abch, aeh, aefg, abg, in Fig. 3).
d f
e 9
Fig. 3-A simple signal flow graph.
A feedback loop is a path that forms a closed cycle alongwhich
each node is encountered once per cycle (bd, cf,def, but not bcfd,
in Fig. 3). A path gain is the product ofthe branch gains along
that path. Theloop gain of afeedback loop is the product of the
gains of the branchesforming that loop. The gain of a flow graph is
the signalappearing at the sink per unit signal applied at
thesource. Only one source and one sink need be considered,since
sources are superposable and sinks are independ-ent of each
other.
Additional terminology will be introduced as needed.
(7)
(8a)(8b)(8c)(8d)
1956 921
Authorized licensed use limited to: Universidad Nacional
Autonoma de Mexico. Downloaded on October 22, 2008 at 17:44 from
IEEE Xplore. Restrictions apply.
-
PROCEEDINGS OF TIHE IRE
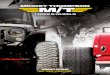
GENERAL FORMULATION OF FLOW GRAPH GAINTo begin with an example,
consider the graph shown
in Fig. 4. This graph exhibits three feedback loops,whose gains
are
T1-=h (9a)(9b)(9c)
T2= fgT3 de
and two forward paths, whose gains areG1 = abG2= ceb.
'h
(a) .~I f -Ga-abc+d(I - bf)I - ce -hf-cg-dgfe +aecg
e( b) -- - - --
-*----a T = ae
(c) 4-- -- --A---T2=bfb,b
(lOa) g(lOb) (d) -k--C- -
e f g(e) -
de 9
(f ) *---10- --, a
* T,= c g
_
T4=dgfe
- rT1 T3 = aecgc
a(g k o G,=abc,A =I
b c',
bFig. 4-A flow graph with three feedback loops.
To find the graph gain, first locate all possible sets
ofnontouching loops and write the algebraic sum of theirgain
products as the denominator of (11).
G1(1- T1 - T2) +G2( 1- T1)G= -
1 - T -T2-T3+ T,T3(11)
Each term of the denominator is the gain product ofa set of
nontouching loops. The algebraic sign of theterm is plus (or minus)
for an even (or odd) number ofloops in the set. The graph of Fig. 4
has no sets of threeor more nontouching loops. Taking the loops two
at atime we find only one permissible set, T1T3. When theloops are
taken one at a time the question of touchingdoes not arise, so that
each loop in the graph is itselfan admissible "set." For
completeness of form we mayalso consider the set of loops taken
"none at a time" and,by analogy with the zeroth power of a number,
interpretits gain product as the unity term in the denominatorof
(11). The numerator contains the sum of all forwardpath gains, each
multiplied by a factor. The factor fora given forward path is made
up of all possible sets ofloops which do not touch each other and
which also donot touch that forward path. The first forward path(G1
= ab) touches the third loop, and T3 is thereforeabsent from the
first numerator factor. Since the secondpath (G2=ceb) touches both
T2 and T3, only T1 entersthe second factor.The general expression
for graph gain may be writ-
ten as
-f( h ) 0 .1 . .- -oG =d ,A =I bf
I Ns b
d
Fig. 5-Identification of paths and loop sets.
GkAk
k (12a)
whereinGk = gain of the kth forward pathA = 1 - Pml + L Pm2 -
LPm3 +
m m m
PmrT = gain product of the mth possible combina-tion of r
nontouching loops
Ak= the value of A for that part of the graph
(12b)(12c)
(12d)
not touching the kth forward path. (12e)The form of (12a)
suggests that we call A the determi-nant of the graph, and call Ak
the cofactor of forwardpath k.A subsidiary result of some interest
has to do with
graphs whose feedback loops form nontouching sub-graphs. To find
the loop subgraph of any flow graph,simply remove all of those
branches not lying in feed-back loops, leaving all of the feedback
loops, and noth-ing but the feedback loops. In general, the loop
sub-graph may have a number of nontouching parts.The useful fact is
that the determinant of a completeflow graph is equal to the
product of the determinants ofeach of the nontouching parts in its
loop subgraph.
A =I-T1-T T2 -T 3 -T4 +rTI 3
922 Jlty
Authorized licensed use limited to: Universidad Nacional
Autonoma de Mexico. Downloaded on October 22, 2008 at 17:44 from
IEEE Xplore. Restrictions apply.
-
Mason: Further Properties of Signal Flow Graphse
(a) y D
d
(b) *d
f
(c)c
(d).
d(l-be) +abcI-b- be
a + beI-ad-be-cf- bcd-afe
c +abI-od- be -oabf -cd -cf
i(I-g-h-cd+gh)+ae(l-h)+ bf (i-g)+adf +bceI -g-h-cd+gh
flow graph are in cause-and-effect form, each variableexpressed
explicitly in terms of others, and since physi-cal problems are
often very conveniently formulated injust this form, the study of
flow graphs assumes practi-cal slgnificance.
Z5ilI
(a)
eI i 2 e2 i3 e3I 2 :4 I * e3
-zI -Y2 -Z 3 -Y4
( b)I a b
(e ) f
I e d
g ( -hi -jc-hbcd +hijc) +a ie (1-jc)+ a bcde1- fg -hi-jc -faie -
hbcd -fabcde+ fghi +fg jc+hijc +foiejc+fghbcd- f ghijc
Fig. 6-Sample flow graphs and their gain expressions.
ILLUSTRATIVE EXAMPLES OF GAIN EVALUATIONBY INSPECTION OF PATHS
AND LooP SETS
Eq. (12) is formidable at first sight but the idea issimple.
More examples will help illustrate its simplicity.Fig. 5 (on the
previous page) shows the first of these dis-played in minute
detail: (a) the graph to be solved; (b)-(f) the loop sets
contributing to A; (g) and (h) the for-
i e 2 e2 3 e3
Fig. 7-The transfer impedance of a ladder.
Consider the ladder network shown in Fig. 7(a). Theproblem is to
find the transfer impedance e3/il. One pos-sible formulation of the
problem is indicated by the flowgraph Fig. 7(b). The associated
equations state thatei =zl(il-i2), i2 =y2(el-e2), and so forth. By
inspectionof the graph,
e3 Zly2Z3y4Zsii 1 + Z1y2 + Y2Z3 + Z3Y4 + Y4Z5 + Zly2Z3y4 +
Zly2y4Z6 + y2Z3y4Z6 (13a)
or, with numerator and denominator multiplied byYlYsY5 = 1
/z1z3z6,
e3 Y2Y4ii Yly3y5 + Y2Y3YS + YlY2YS + yly4y5 + Y1Y3Y4 + y2y4y5 +
Y2Y3y4 + yly2y4 (13b)
ward paths and their cofactors. Fig. 6 gives several ad-ditional
examples on which you may wish to practiceevaluating gains by
inspection.
ILLUSTRATIVE APPLICATIONS OF FLOW GRAPHTECHNIQUES TO
PRACTICAL
ANALYSIS PROBLEMSThe study of flow graphs is a fascinating
topological
game and therefore, from one viewpoint, worthwhile inits own
right. Since the associated equations of a linear
This result can be checked by the branch-combinationmethod
mentioned at the beginning of this paper.A different formulation of
the problem is indicated by
the graph of Fig. 7(c), whose equations state thati3-= y5e3, e2=
e3+z4i3, i2=i3+y3e2, and so forth. In thephysical problem i1 is the
primary cause and e3 thefinal effect. We may, however, choose a
value of e3 andthen calculate the value of i1 required to produce
thate3. The resulting equations will, from the analysis view-point,
treat e3 as a primary cause (source) and il as
9231956
Authorized licensed use limited to: Universidad Nacional
Autonoma de Mexico. Downloaded on October 22, 2008 at 17:44 from
IEEE Xplore. Restrictions apply.
-
PROCEEDINGS OF THE IRE
the final effect (sink) produced by the chain of calcu-lations.
This does not in any way alter the physical roleof ii. The new
graph (c) may appear simpler to solvethan that of (b). Since graph
(c) contains no feedbackloops, the determinant and path cofactors
are all equalto unity. There are many forward paths, however,
andcareful inspection is required to identify the sum oftheir gains
as
- = ylz2y3z4y5 + y1z2y3 + y1z2y6 + y1z4y6e3
+ y3Z4y5 + yl + y3 + y5
(a) (b)
(13c)which proves to be, as it should, the reciprocal of
(13b).Incidentally, graph (c) is obtainable directly from graph(b),
as are all other possible cause-and-effect formula-tions involving
the same variables, by the process ofpath inversion discussed in a
previous paper.2 Thisexample points out the two very important
facts: 1)the primary physical source does not necessarily appearas
a source node in the graph, and 2) of two possibleflow graph
formulations of a problem, the one havingfewer feedback loops is
not necessarily simpler to solveby inspection, since it may also
have a much more com-plicated set of forward paths.
Fig. 8(a) offers another sample analysis problem,determination
of the voltage gain of a feedback ampli-fier. One possible chain of
cause-and-effect reasoning,which leads from the circuit model, Fig.
8(b), to theflow graph formulation, Fig. 8(c), is the following.
Firstnotice that eg, is the difference of e1 and ek. Next expressii
as an effect due to causes eg1 and ek, using superposi-tion to
write the gains of the two branches enteringnode i1. The dependency
of eg2 upon il follows directly.Now, e2 would be easy to evaluate
in terms of eithereg2 or if if the other were zero, so superpose
the twoeffects as indicated by the two branches entering nodee2. At
this point in the formulation ek and if are as yetnot explicitly
specified in terms of other variables. It isa simple matter,
however, to visualize ek as the super-position of the voltages in
Rk caused by i1 and if, and toidentify if as the superposition of
two currents in Rfcaused by ek and e2. This completes the graph.The
path from ek to eg0 to i1 may be lumped in
parallel with the branch entering i1 from ek. This
simpli-fication, convenient but not necessary, yields the
graphshown in Fig. 9. We could, of course, have expressed ilin
terms of e1 and ek at the outset and arrived at Fig. 9directly. All
simplifications of a graph are themselves
(C)Fig. 8-Voltage gain of a feedback amplifier. (a) A feedback
ampli-
fier; (b) The midband linear incremental circuit model; (c)
Apossible flow graph.
Rk
Fig. 9-Elimination of superfluous nodes e,j and e,2.
possible formulations. The better our perception ofthe workings
of a circuit, the fewer variables will weneed to introduce at the
outset and the simpler will bethe resulting flow graph
structure.
In discussing the feedback amplifier of Fig. 8(a) itis common
practice to neglect the loading effect of thefeedback resistor Rf
in parallel with Rk, the loadingeffect of Rf in parallel with R2,
and the leakage trans-mission from ek to e2 through Rf. Such an
approximationis equivalent to the removal of the branches from ekto
if and if to e2 in Fig. 9. It is sometimes dangerous tomake early
approximations, however, and in this case nioappreciable labor is
saved, since we can write the exactanswer by inspection of Fig.
9:
lAlA2RlR2 RAR-1ARkr2R2e2 (r1 + R1)(r2 + R2) L Rf I (r1 +
R1)(Rf)(r2 + R2)el 1 + (/l1 + 1)Rk RA, r2R2 +(l + 1)/2R,RkR2 (g1 +
1)Rkr2R2r+ + +R++ +++ 1 Rf Rf1(r2 R2) Rf1(ri + RI)(r2 + R2) Rf,(r,
+ Ri)(r2 R2)
(14)
924 July
Authorized licensed use limited to: Universidad Nacional
Autonoma de Mexico. Downloaded on October 22, 2008 at 17:44 from
IEEE Xplore. Restrictions apply.
-
Mason: Further Properties of Signal Flow Graphs
The two forward paths are elile2 and elilekife2, the firsthaving
a cofactor due to loop ekif. The principal feed-back loop is
ile2ifek and its gain is the fifth term of thedenominator. Physical
interpretations of the variouspaths and loops could be discussed
but our main pur-pose, to illustrate the formulation of a graph and
theevaluation of its gain by inspection, has been covered.As a
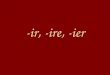
final example, consider the calculation of micro-
wave reflection from a triple-layered dielectric sand-wich. Fig.
10(a) shows the incident wave A, the re-flection B, and the four
interfaces between adjacentregions of different material. The first
and fourth inter-faces, of course, are those between air and solid.
Letri be the reflection coefficient of the first interface,relating
the incident and reflected components of tan-gential electric
field. It follows from the continuity oftangential E that the
interface transmission coefficientis 1 +r1, and from symmetry that
the reflection coeffi-cient from the opposite side of the interface
is the nega-tive of ri. A suitable flow graph is sketched in
Fig.10(b). Node signals along the upper row are right-going waves
just to the left or right of each interface,those on the lower row
are left-going waves, and quanti-ties d are exponential phase shift
factors accounting forthe delay in traversing each layer.Apart from
the first branch r1, the graph has the
same structure as that of Fig. 6(e). Hence the reflectiv-ity of
the triple layer will be
B--= ri + (1 + ri) (1 - rl)G (15)A
where G is in the same form as the gain of Fig. 6(e). Weshall
not expand it in detail. The point is that theanswer can be written
by inspection of the paths andloops in the graph.
PROOF OF THE GENERAL GAIN EXPRESSIONIn an earlier paper2 a
quantity A was definied as
A = (1 - Ti')(I - T2') ... (1 - Tn') (16)for a graph having n
nodes, where
Tk' =loop gain of the kth node as computed with
allhigher-numbered nodes split.
Splitting a node divides that node into a new source anda new
sink, all branches entering that node going withthe new sink and
all branches leaving that node goingwith the new source. The loop
gain of a node was de-fined as the gain from the new source to the
new sink,when that node is split. It was also shown that A, as
com-puted according to (16), is independent of the order inwhich
the nodes are numbered, and that consequently A isa linear function
of each branch gain in the graph. It fol-lows that A is equal to
unity plus the algebraic sum oJvarious branch-gain products.We
shall first show that each term of A, other than
the unity term, is a product of the gains of nontouching
A
B
In
)
r I( I) (2) (3) (4)
(a)
I-r, d12 +r2 d23 1+ r3 d34
AP (-r -2 P.r 3} X3 4
I-r1 d12 I-r2 d23 1-r3 d34(b)
Fig. 10-A wave reflection problem. (a) Reflection of wavesfrom a
triple-layer; (b) A possible flow graph.
k-ak
(a)
(c)
(b)
,* o~~~~~~~~~~~~~~~~I-
(d)
Fig. 1I-Two touching paths.
feedback loops. This can be done by contradiction. Con-sider two
branches which either enter the same nodeor leave the same node, as
shown in Fig. 11(a) and (c).Imagine these branches imbedded in a
larger graph, theremainder of which is not shown. Call the branch
gainska and kb. Now consider the equivalent replacements(b) and
(d). The new node may be numbered zero,whence To'=O, the other T'
quantities in (16) are un-changed, and A is therefore unaltered. If
both brancheska and kb appear in a term of the A of graph (a)
thenthe square of k must appear in a term of the A of graph(b).
This is impossible since A must be a linear functionof branch gain
k. Hence no term of A can contain thegains of two touching
paths.Now suppose that of the several nontouching paths
appearing in a given term of A, some are feedback loopsand some
are open paths. Destruction of all otherbranches eliminates some
terms from A but leaves thegiven term unchanged. It follows from
(16) and thedefinitions of Tk', however, that the A for the
subgraphcontaining only these nontouching paths is just
A = (1 - T1)(1 - T2) . . . (1 - Tm) (17)where Tk is the gain of
the kth feedback loop in the sub-graph. Hence the open path gains
cannot appear in thegiven term and it follows that each term of A
is theproduct of gains of nontouching feedback loops. More-over, it
is clear from the structure of A that a term inany subgraph A must
also appear as a term in the A ofthe complete graph, and
conversely, every term of A is a
1956 925
Authorized licensed use limited to: Universidad Nacional
Autonoma de Mexico. Downloaded on October 22, 2008 at 17:44 from
IEEE Xplore. Restrictions apply.
-
PROCEEDINGS OF THE IRE
term of some subgraph A. Hence, to identify all possibleterms in
A we must look for all possible subgraphs com-prising sets of
nontouching loops. Eq. (17) also showsthat the algebraic sign of a
term is plus or minus inaccord with an even or odd number of loops
in thatterm. This verifies the form of A as given in (12c)
and(12d).We shall next establish the general expression for
graph gain (12a). The following notation will prove con-venient.
Consider the graph shown schematically inFig. 12, with node n+1
given special attention. LetA'= the A for the complete graph of n+1
nodes.A = the value of A with node n+1 split or removed.T=the loop
gain of node n+1.
n+I FIRST n NODES
Fig. 12 A flow graph with one node placed strongly in
evidence.
There will in general be several different feedback
loopscontaining node n+ 1. LetTk= gain of the kth feedback loop
containing noden+1,
Ak = the value of A for that part of the graph nottouching loop
Tk.
With the above notation, we have from (16) that
(18)A
Remembering that any A is the algebraic sum of gainproducts of
nontouching loops, we find it possible to write
A' = A - E TkAk.k
(19)
Eq. (19) represents the count of all possible nontouch-ing loop
sets in A'. The addition of node n+1 createsnew loops Tk but the
only new loop sets of A' not al-ready in A are the nontouching sets
TkAIc. The negativesign in (19) suffices to preserve the sign rule,
since theproduct of Tk and a positive term of Ak will contain anodd
number of loops.
Substitution of (19) into (18) yields the generalresult:
E TkAkk
T = (20)
With node n+1 permanently split, T is just the source-to-sink
gain of the graph and Tk is the kth forward path.This verifies
(12a).
ACKNOWLEDGMENTThe writer is indebted to Prof. K. Wildes and
also
to J. Cruz, L. Boffi, G. Amster, and other students inhis 1955
summer-term class in subject 6.633, ElectronicCircuit Theory,
M.I.T.; for helpful suggestions.
CORRECTIONJames R. Wait, author of the Correspondence item
"The Radiation Pattern of an Antenna Mounted on aSurface of
Large Radius of Curvature," which appearedon page 694 of the MAy,
1956 issue of PROCEEDINGS, hasrequested that the following text,
modified in editing,be reinstated in its original form.The last
sentence in the first paragraph should read:
"It is the purpose of the present note to extendand apply the
Van der Pol-Bremmer theory to
calculate the radiation pattern of a dipole or a sloton a
conducting sphere of large radius."The last sentence of the article
should read:
"It is interesting to compare this value with the6 db field
strength reduction in the tangent planefrom a slot on a flat ground
plane which is abruptlytruncated."Mr. Wait has also informed the
editors that in
(2), the second bracketed term should be zhJ(')(z).
926 _J u- y
Authorized licensed use limited to: Universidad Nacional
Autonoma de Mexico. Downloaded on October 22, 2008 at 17:44 from
IEEE Xplore. Restrictions apply.