Embed Size (px)
Citation preview

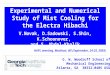
Mark Tillack, Lane Carlson,Jon Spalding
Laboratory Demonstration of In-chamber Target Engagement
HAPL Project MeetingRochester, NY
8-9 November 2005
Dan Goodin, Graham Flint, Ron Petzoldt, Neil Alexander

We are attempting to demonstrate the “pessimistic” version in-situ target
engagement system proposed by Flint 3/05 (Gen II)
Key Requirements:
•20 m accuracy in (x,y,z)
•1 ms response time
Goals:
Full integration of all key elements of target engagement
Benchtop demo first: identify and solve problems before investment in full-scale, high-performance demonstration

Glint system: beamlet fine adjustmentto compensate drift
The system consists of Poisson spot detection, Doppler fringe counting, a
simulated driver with steering, and a glint-based alignment
The driver beam is simulated with a HeNe laser
Doppler fringe counting provides z and timing (v)
Poisson spot system measures (x,y)

Initial Poisson spot results were reported at the previous HAPL
meeting*
We demonstrated Poisson spot detection with 5 µm accuracy in <1 ms using a translation stage and an ex-situ centroiding algorithm
* L. Carlson, M. Tillack, D. Goodin, G. Flint, “R&D Plan for Demonstrating Elements of a Target Engagement System”

To perform real-time target engagement on the benchtop, we needed a target transport
method
CMOS camera
illumination laser
PSD
4-mm SS sphere
We are using various translation stages and rail systems
We’re still working on a more prototypical surrogate transport method

Our in-line benchtop centroiding system now runs continuously at <20 ms per
measurement
– this allows us to begin real-time feedback to beam steering
– higher speed will require real-time OS and a faster camera
– 1 cm/s target speed over 1 m travel
– 100 fps Basler camera
– Labview running on Windows XP
Approximate Time (ms)
Image Processing Initialize/setup visualization subvi's 0.5 Acquire image from 100 fps CMOS camera via firewire 6 Search image and match Poisson spot pattern with memory 9 Set coordinate system to center of matched pattern 0.5 Find circular edge of the Poisson spot 0.5 Output centroid coordinates, convert pixels to distance 1
Total 17.5
Breakdown of times

Integration of Poisson spot detection with a “fast” steering mirror was
implemented
We passed a pseudo driver beam through a 10x beam expander to magnify the range of motion of FSM (±1.5 mm)
Determining the location of the driver on the target is difficult – the accuracy of engagement is confirmed with an offset PSD as a surrogate target

QuickTime™ and aMPEG-4 Video decompressor
are needed to see this picture.
Open loop Poisson spot tracking: The Movie
±3 mm CMOS±1.5 mm PSD
white dot:Poisson spot
yellow dot:PSD
1. At t=0, PSD initialized at (0,0)
2. Start train moving
3. Measure Poisson spot (x,y)
4. Move FSM to follow sphere
5. Measure accuracy using PSD

Engagement is performed in 23.5 ms, but dynamic errors are too
large
Sources of errors: • rocking of PSD & target• speed limitations in PC hardware/
software • overly simplistic gain curves • FSM quality
Approximate Time (ms)
Image Processing Same steps itemized above 17.5
Read DAQ Channels Read DAQ channels for PSD voltages, 2 convert to distance, graph, display
PID Control Apply PID algorithm to X and Y axies, 2 apply gain, graph, display
Write DAQ Channels Output voltages to FSM controller 2
Total 23.5
Breakdown of timesx-axis comparison of PS and PSD readings

higher performance will require a better FSM
Beam deflection is nonlinear with drive voltage and exhibits
severe resonant behavior
595 Hz 617 Hz
1 ms
We characterized the Thorlabs piezo cage mirror mount using a signal generator

Work has begun on Doppler fringe counting
• Restrictions on laser power limit the use of a metal sphere, so we’re using an n=2 sphere and flat mirror
• Single-wavelength (632.8 nm)
• Errors due to translation stage, vibration, air flow
Repeatability demo using micrometer: travel of 5 mm with 10 m increments
An N=2 ball lens is a retroreflector:

We performed a fast tracking demo at 1000 Hz using a high-speed pellet and post-shot centroid analysis
1000 fps, 10 ms per frame video sequence of surrogate target coming into, then out of the camera’s FOV, at 150 m/s (Photron camera)
Curvature in the target trajectory allows us to avoid a shutter mirror for a range of velocities
Speed of gun is too fast, speed of tracking too slow:
work on the benchtop

Next Steps: more integration and more
prototypical
Poisson system:Acquire a faster camera and real-time OS
Doppler system:
Demonstrate counting on metal spheres with longer pathsImplement dual-wavelength counting
Integration of Doppler and Poisson:On-axis demonstration (pseudo-integration)Off-axis demonstration (true integration)
Integration of Poisson and FSM:Improve control of the environment, acquire a high-end
FSM
Glint system Install glint laser and coincidence sensor, align 2 beamlets