Embed Size (px)
Citation preview

Presented by Lane Carlson1
M. Tillack1, J. Stromsoe1,N. Alexander2, G. Flint2, D. Goodin2, R. Petzoldt2
(1UCSD, 2General Atomics)
HAPL Project WorkshopMadison, WI
Oct. 22-23, 2008
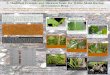
Improving the Accuracy of a Target Engagement
Demonstration
IFT\P2008-082

Hit-on-the-fly experiment has demonstrated improved engagement on moving targets
1) Implementation of a camera to capture the glint return signal gives a more repeatable & dependable signal.
2) Vacuum chamber nearing completion.
3) Step-by-step improvements have yielded better engagement: • Oct 2007 - 150 µm engagement
• April 2008 - 80 µm
• 42 µm (1) engagement for targets in ± 1.5 mm range.
Final Requirement:• 20 µm engagement accuracy in (x,y,z) at ~20 m (10-6)

Tabletop experiment demonstrates key elements of a power plant engagement system
Drop tower
Crossing sensors
Glint laser
Coincidence sensor
Poisson spot laser
Steering mirror
Driver beam

• Initially used a position sensitive detector (PSD) to detect glint return– PSD spec limits position accuracy to ~50 µm– Non-linear near edges of sensor
Camera has replaced PSD and has been fully implemented
Noah 4mm x 4mm PSD Basler GigE camera
• Using a camera allows for direct, linear geometric position reporting of the glint centroid.– Camera accuracy and resolution 1 µm with energy
centroiding techniques.

Camera tracks Poisson spot to determine target’s transverse position
Poisson spot system is active in:
1. Pre-steering prediction
Poisson spot tacking & pre-
steering
Target released
Chamber center
± 1.5 mm
Target trajectory
Glint location
Tim
e
2. Correction for large wedge angle
(won’t be necessary in a power plant due to 20 m standoff)
5 ms/div
Driver pulse
Glint pulse
Pre-steeringinstructions
Final steeringinstructions

Poisson spot system predicts and sets camera’s area of interest (AOI)
6 mm x 4 mm camera image of glint return
80 x 80 pixel AOI
3. Setting glint camera’s AOI
• Less pixels = faster download, processing time
Final Timing Sequence1. Glint triggers2. Move AOI using PS prediction3. Capture image4. Send to host computer5. Compute centroid and mirror
instructions6. Steer mirror TOTAL TIME = < 3.0 ms

C1
C2
Initial testing conducted in air from 1.5 m drop tower
Crossing sensors
Dropper
• Gravity yields a consistent “injector” for testing, 5.5 m/s after 1.5 m
Vacuum chuck releases target• Clear view along trajectory• Placement accuracy ± 1.5 mm

New vacuum chamber will permit engagement of lightweight targets
• In air, wake effects on target are minimal for SS BBs but substantial for lightweight targets.
2 m tall
Crossing sensors
Dropping chamber
Engagement chamber
• In vacuum:– Spurious eddies & wake
effects will be eliminated– Prototypic of power plant– Will permit engagement of
lightweight targets

Tri-dropper will improve placement accuracy of lightweight targets in vacuum• Recoil-free pin extraction ensures precise target release
• Pins retract for unobscured view of target trajectory
Tri-dropper ~25 cm wide
Linear ball bearings
Solenoids
• Placement accuracy < 1mm in air w/ SS BB
4-mm BB
Ruby-tipped pins
10 drops on carbon paper

QuickTime™ and aCinepak decompressor
are needed to see this picture.
High-frame rate camera confirms simultaneous pin extraction

Construction and leak-checking of vacuum chamber is underway
Dropping mechanism

Dropping mechanism allows uninterrupted and repeatable target dropping in vacuum
QuickTime™ and aPhoto - JPEG decompressor
are needed to see this picture.

Crossing sensors are implemented into sturdy vacuum-compatible design
Photo diodeLED
Previous design
CS1
CS2

Time (ms)
Function
0 Detect 1st crossing
50 Detect 2nd crossing, predict glint/driver trigger time
0-244 Poisson spot tracking, alignment beam centering by mirror
240 Camera’s AOI set
244 Glint laser triggered, glint return captured by camera
245 Glint return centroid found, steering calculated
246 Mirror steered
250 Driver pulsed, target engaged, accuracy verified
Real-time computers, fast cameras, and LabView software monitor and control all system functions
Crossing sensorsCrossing sensors
RT timing & triggering
system
RT timing & triggering
system
Glint laserGlint laser
Steering mirrorSteering mirror
Alignment/driver laserAlignment/driver laser
LabView host
computer
LabView host
computer
RT Poisson spot tracking
computer
RT Poisson spot tracking
computer
Poisson spot
tracking camera
Poisson spot
tracking camera
Dataacquisition
I/O card
signal
triggercontrol
LAN
light source
Networkswitch
Glint camera
Glint camera
Poisson spot laser
Poisson spot laser
Verification camera
Verification camera

• Identified error sources that contribute to engagement
• Compare individual errors to observed engagement errors
Systematic identification and reduction of errors yields insight on major contributors
(Numbers in brackets do not contribute)

Target Engagement ImprovementsDriver beam ovefilling target in flight
0
20
40
60
80
100
120
140
160
A B C D E F G H
Improvement
Total Engagement (µm)
Total eng. error
Total RMS eng. error
PSD limit
Goal
A. 4:1 mag,
defocusedB. Focused glint
returnC. Focused, small
apertureD. 1:1 magnificationE. 1:1 mag, improved
calibr.F. Glint camera
replaces PSDG. Stable beam
splitter, small delta steering
H. Vacuum chamber and others
Systematic error reduction yields step-by-step engagement improvements
New data points

Scatter plots of engagement results show tighter spread
• Dropping in air, stainless steel BB, 5.5 m/s• Shows driver beam center incident on 4 mm
targetAugust 2007
150 µm RMS error
August 2008
42 µm RMS error

We expect substantially reduced errors with full implementation of vacuum chamber
With full implementation of the vacuum chamber and mirror S/N improvement, we can reasonably expect to attain ~20 µm engagement based on these numbers.

Future effort focuses on completing demo and achieving 20 µm engagement goal
In summary:In summary:
• We have improved the demonstration of engagement accuracy to 42 µm (RMS).
Next steps:Next steps:• Fully implement vacuum chamber, tri-dropper,
and mirror.• Engage lightweight targets in vacuum.
Long-term effort:Long-term effort:
• Mate with a prototypic injector in vacuum.

End of slideshow