Embed Size (px)
Citation preview

Research ArticleLow Altitude UAV Air-to-Ground Channel Measurement andModeling in Semiurban Environments
Zhihong Qiu1 Xi Chu1 Cesar Calvo-Ramirez2 Ceacutesar Briso2 and Xuefeng Yin1
1College of Electronics and Information Engineering Tongji University Shanghai 201804 China2School of Systems and Telecommunications Engineering Technical University of Madrid 28031 Madrid Spain
Correspondence should be addressed to Zhihong Qiu qiu zhihongtongjieducn
Received 26 June 2017 Revised 18 September 2017 Accepted 8 October 2017 Published 13 November 2017
Academic Editor Daniele Pinchera
Copyright copy 2017 Zhihong Qiu et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Small- and medium-sized unmanned aerial vehicles (UAVs) can fly for a short distance (lt2 km) from a control station in anonsegregated air space (altitudes lt 100m) It is of great interest to model the propagation channel under such condition wherethere is an important influence from the environmentThis paper presentsmultiplemeasurements carried out in low altitudeswith amedium-sized UAV flying over a semiurban environment Path loss exponent is given based on the measurements done at differentaltitudes and a height-dependent Rician 119870 factor model is proposed The results clearly reveal the existence of two propagationzones with very distinct channel characteristics The breakpoint indicates the height where the condition of the channel changesrapidly At low altitudes the obstacles generate a large amount of multipath and the propagation is greatly affected while at higheraltitudes the influence mitigates Our results are useful for the modeling of low altitude air-to-ground (AG) propagation channelsand the performance analysis of UAV-enabling AG communication systems such as the channel capacity and the throughput
1 Introduction
The usage of unmanned aircraft systems (UASs) has beenincreasing significantly in recent years and a strong growthof commercial applications is expected in the coming years[1]Themajority of UASs are expected to be small andmicro-UASs which are also called ldquodronesrdquo Most commercialdrones are usually multiple rotor copters with a structuredifferent from that of airplanes which allows them to easilytake off without a long runway Drones are slow but moreflexible and have high mobility dynamics with the ability tofly in all directions in 3D space In most countries theseUASs are facing more and more regulations For instancein the USA and Europe civil drones can only fly withoutexceeding the regulated altitude (100m) and distance (lt1 km)in nonsegregated air spaces and must be under direct visualline of sight of the operator [2 3]
For civil applications UAVs are promising in numerousareas such as agriculture industry scientific surveys emer-gency communications safety and rescue package trans-portation and video filming These applications raise high
requirements on high quality communication links for con-trol and high capacity links for the transmission of payloadinformation Also UASs must be operative in complexenvironments such as urban areas and industrial scenariosFor those communication scenarios part of the L-band(1ndash12 GHz) is currently being proposed for the control linkand the C-band (4ndash6GHz) for the payload [4] Thus it isnecessary to carefully model the air-to-ground (AG) channelat low altitudes in these frequency bands
The AG channel has been extensively modeled and char-acterized inmultiple experiments Generally the AG channelhas been treated as either a free-space channel or a two-raychannel [5] that adds a reflection from the earthrsquos surfaceto the direct or line-of-sight (LoS) component Conven-tional AG channel measurements and modeling were madewith large aircraft at high altitudes using fixed wing airplanes[6] balloons [7] or airships [8] However the heights andflight dynamics of those measurements are different andinadequate to describe the influence of the ground environ-ment on the propagation channel at low heights Only a fewmeasurements conducted at low altitudes can be found in
HindawiWireless Communications and Mobile ComputingVolume 2017 Article ID 1587412 11 pageshttpsdoiorg10115520171587412
2 Wireless Communications and Mobile Computing
the literature [9] yet the altitudes are still higher than 200m Therefore it is necessary to investigate and model thepropagation channel of small UAVs at heights from 0 to100m In this range of heights the propagation is seriouslyaffected by the environment and the heights of the adjoiningobstacles There is an increase of the average path lossesdue to deep fast fading Some reports concerned with thisphenomenon at low altitudes have been given [8 10] andsimulations made by ray tracing methods [11] can explainthe effects of the reflection diffraction and scattering of theenvironment on low altitude AG channels
In [12] the author conducted measurements at differentdistances and altitudes with a small UAV using 80211 net-works where an interesting phenomenon of the impact ofheight on the propagation channel was observed In [13] aheight-dependent model based on ray tracing methods hasbeen proposed However more literature focuses on the ele-vation angle of the link distance of UAVs In [14] the aircraftwas flying circularly around the base station to investigatethe impact of the angle In [11 15] ray tracing methodswere applied to investigate the propagation channel in urbanenvironments and in [16] wideband measurements wereconductedwith aUAVbeing fixed at a certain position whichdepicts the influence of the ground In [17] narrowband andwideband channel measurements were introduced using LTEsignals In general there is still limited literature onmodelingat ultralow altitude for small UAVs
In our case we have investigated the variations of thepropagation channel within the flying range of small- andmedium-sized UAVs Measurements of different flight routesin a semiurban complex environment have been done toobtain data of different positions The analysis of measure-ment results shows that small-scale fading has high depen-dency on the flying height instead of the elevation angle orthe distance The structure of this paper is organized asfollows Section 2 introduces the measurement equipmentconfiguration and details of themeasurement campaign Sec-tion 3 analyzes the data and proposes a path loss model anda height-dependent Rician 119870 factor model Then Section 4gives a simulation of the model proposed Conclusions aregiven in Section 5
2 Measurement
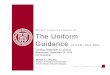
21 Measurement System The testbed is composed of a lightcontinuous wave transmitter installed at the lower part of amedium-sized UAV The test transmitter can work in L- andC-bandswith amaximum transmitting power of 30 dBmThefrequencies used for measurements are 1200MHz for L-bandand 4200MHz for C-band respectively The transmittingantennas used on the UAV are two cloverleaf antennasworking in L- and C-bands respectively These antennashave circular polarization with an omnidirectional radiationpattern on the horizontal plane and a 3 dB beamwidth of 60∘for L-band and 55∘ for C-band The antennas were installedon the bottom of theUAVpointing straight down as shown inFigure 1 tominimize interferences from theUAV structure Inour case the UAV used has a very good azimuthal stabilityso that we could have used even linear polarization in
Tx
Rx
UAV
Figure 1 UAV and the test environment
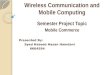
Building 2
Building 1
Building 3
Containers
RxV2
V3V4
V1
Figure 2 Measurement environment from Google Earth
the UAV with a minimum error Nevertheless cloverleafcircularly polarized antennas are widely used for small UAVsand we can minimize the polarization errors using circularpolarization in the UAV and linear polarization in the groundstation
The receiving system consists of two antennas of typeMGRM-WHF with 20 cm separation The antenna is ver-tically polarized with a gain of 3ndash5 dB and its half-powerbeamwidth in elevation is 50∘ The antennas were installedon a 15m mast The Rx was a standard portable spectrumanalyzer with customized software to record measurementsat a speed of 10 measurements per second The receiver hastwo channels and each was connected to one antenna Bothchannels received the same signal
The UAV is a hexacopter of 3 kg weight which is able tocarry a 2 kg payload and has 20 minutes of flying enduranceThe system was controlled with a 24GHz link and wasmonitored with a ground station where the telemetry dataof height speed and position were received The flights weremade with computer-assisted control software to guaranteethe accuracy of the trajectories
22 Measurement Campaigns The measurements were con-ducted in a suburban open environment as depicted inFigure 2 where there are many buildings metal containersand trees This environment is a multipath-rich environmentso that we can easily distinguish the influence of the flying
Wireless Communications and Mobile Computing 3
Table 1 Measurement trajectory details
Trajectory Direction Distance HeightV1 Vertical 20m 0ndash25mV2 Vertical 40m 0ndash50mV3 Vertical 60m 0ndash50mV4 Vertical 100m 0ndash100mH1 Horizontal 20ndash90m 10mH2 Horizontal 20ndash90m 30m
H1
H2
RxV1
V2V3
V4
Containers
Building 1 Building 2
Building 3
100 m
100 m
60m
50m
40 m20 m
25 m
0m
0m
Figure 3 Flight trajectories
height on the propagation Measurements were made withvertical and horizontal flights Vertical flight trajectories asshown with yellow lines in Figure 3 were conducted at analtitude from 0 to 100m with the UAV taking off and landingat several fixed distances from 20m to 100m away from theRx and the horizontal position was stabilized Vertical flightsguarantee that the influence of the environment remainsconstant and can accurately model the influence of the heightwith negligible influence from the antennas Several horizon-tal flights were also made with the UAV starting at a position20m away from Rx following a straight line forward withconstant altitude at 10m and 30m and landing at a position90m away from the Rx
The vertical ascending speed was monitored on theground station as 07m per second and the horizontalforward speed was around 12mper secondThe same flightswere made for L-band and C-band measurements All flightsensure that the LoS link between the Tx and the Rx is withinthe range of the antenna radiation patterns Details of themeasurement trajectories are shown in Table 1 To be clearwe use ldquoV1V2 rdquo to represent the specific measurementtrajectory in the rest of this paper
23 Calibration In this section the radiation patterns ofantennas were measured in an anechoic chamber of 6 times 3 times3m3 in order to calibrate the antennarsquos influence on thecomplete site
The UAV was installed on a rotating positioner withthe transmitting antennas placed on the bottom of it Bothazimuth and elevation planes were measured for the twocloverleaf antennas one for 12 GHz and one for 42GHzrespectively Depicted in Figure 4(a) are the measuredradiation patterns It can be observed that the elevationradiation patterns of these antennas have more than 60∘of 3 dB beamwidth with a uniform response and have not
Table 2 Path loss exponent 119899C-band L-band
Height 10m 30m 10m 30m119899 27631 26433 33464 29889
been influenced by the UAV In Figure 4(b) we presentthe measurements of the base station antennas which arecommercial antennas We present only measurements of theelevation planes with the base station antennas installed onthemast we used As we can see the radiation patterns can beusedwithminor error for directionswith elevations up to 60∘
Therefore we can postulate that the measurements areaccurate until 60∘ elevation angle for the UAV In fact themaximum elevation that we consider in the campaign is upto 45∘ which is much less than 60∘ The results also showthat the antenna radiation patterns exhibit smooth gains inthe azimuth-elevation ranges considered for acquiring thedata and thus the measured channel properties are mainlywith respect to the propagation characteristics with negligibleimpact from the antennas
3 Data Analysis and Results
31 Path Loss Modeling The horizontal measurements areused to determine the path loss exponent (PLE) 119899 of theconventional path loss model in this environment in whichPL(119863) results as follows
PL (119863) = PL (1198630) + 10119899 log10 ( 1198631198630) + 119883120590 (119870) (1)
where1198630 denotes the reference distance and119863 represents thelink distance between the Tx and the Rx 119863 equals radic1198892 + ℎ2where 119889 is the horizontal distance between Tx and Rx andℎ is the height of the UAV 119883120590(119870) is the small-scale fadingfollowing Rician distribution with different 119870 The values of119899 are given in Table 2
Hence the fittings of the path loss model based onhorizontal flights at 10m (measurement H1) and at 30m(measurement H2) for L-bandC-band are given in Figure 5The PLEs 119899 are from 264 to 335 which are typical values forsuburban areas
It is interesting that the value of 119899decreaseswhen theUAVheight increases which is also observed in measurements V3and V4 shown in Figure 6 It is noted that in [18] the PLE isalso found to decrease with the increase of the relative heightof the base station in railway viaduct scenarios and in [19]the PLE 119899 is measured and found to be less than 2 and isclose to free space when UAV is at an altitude higher than500m in a suburban environmentThus we consider that thepath loss has a tendency to declinewith the increasing ofUAVheights at low altitude while at a high altitude it approachesfree spaceThis phenomenon could be the consequence of thereduction of multipath during the ascending process of theUAV
32 Analysis of the Vertical Measurements We have observedthat the properties of the channel remain stable when the
4 Wireless Communications and Mobile Computing
0
30
4560
90120
135
150
180
Elevation plane pattern
Antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
Azimuth plane pattern
minus30 minus20 minus10 minus3 0
42 GHz12 GHz
(a) Transmitting antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
MGRM-WHF elevation plane
Frequency42 GHz12 GHz
(b) Receiving antenna (c) UAV with the transmitting antennas
Figure 4 Radiation patterns of the antennas
UAV flies within short ranges at a constant height Thus ver-tical measurements were made to investigate the propagationchannel with respect to height
Illustrated in Figure 6 are the results of measurementsV3 and V4 It is observed that the vertical measurementsconducted at different distances away from Rx show highsimilarity Strong fading is observed in both horizontal andvertical measurements at low altitudes which shows highdependency on UAVrsquos heights As observed in Figure 6 thereare two obvious propagation zonesThere are deep fading andextra losses in zone 1 while in zone 2 the power is moresimilar to free-space channel Therefore we have divided thechannel into two zones defined by a ldquobreakpointrdquo BP whichis around 45m in our test environment
It is noted that the observations about BP in narrowbandmeasurements in this paper are different from the prelim-inary work in [17] This is because the height of the basestation antennas applied in the preliminary work was around50 cm which was so low that there was an influence of thefirst Fresnel zone However in this work the antennas wereinstalled on a 15m high mast and thus the effect of the firstFresnel zone was minimized Of course there were otherminor things that is the signal-to-noise (SNR) ratio in thepreliminary work was not so high which also could result insuch differences
In this work the measurement equipment was wellcalibrated and the influence of antennas has been consideredAlso the measurements have been repeated several times in
Wireless Communications and Mobile Computing 5
Measurement H1 Measurement H2
Measurement H1 Measurement H2
Fit H1 L-band Fit H2 L-band
Fit H1 C-band Fit H2 C-band
minus70minus60minus50minus40minus30minus20
Rece
ived
pow
er (d
Bm)
40 9060 70 10030 50 80Distance link (m) L-band
60 9070 1004030 50 80Distance link (m) C-band
minus80
minus70
minus60
minus50
minus40
minus30
Rece
ived
pow
er (d
Bm)
Figure 5 Influence of the link distance on path loss for L-bandC-band
Zone 1
Zone 1
Zone 2
Zone 2
UAV height (m)
UAV height (m)Measurement V4 L-bandMeasurement V3 L-band
Measurement V4 C-bandMeasurement V3 C-bandFree-space model
Free-space model
10
10
20
20
30
30
40
40
50
50
60
60
70
70
80
80
90
90
100
100minus100
minus80
minus60
minus40
minus20
Rece
ived
pow
er (d
Bm)
minus100
minus80
minus60
minus40
Rece
ived
pow
er (d
Bm)
Figure 6 Comparison of the vertical measurements and the free-space model for L-bandC-band
order to rule out the impact of the randomnessThus a morethorough investigation can be conducted compared to theworks presented in [17]
Figure 7 illustrates the fast fading of measurements V3and V4 where large-scale fading has been removed bysubtracting a 20-wavelength moving average power from thereceived signal
As mentioned earlier the measurement site in our casehas many scattering obstacles (ie containers buildings andlots of trees) According to our measurement results we
Zone 1
Zone 1 Zone 2
Zone 2
L-band V4L-band V3
C-band V4C-band V3
0 10 20 30 40 50 60 70 80 90 100
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
10 20 7040 50 80 10030 90600Height (m)
Height (m)
Figure 7 Fading behavior with respect to height
notice that the propagation channel at ultralow altitude iseasily affected by those obstacles on the ground The signalreceived is considered as a composition of a large numberof waves originated from the LoS path multipath scatteringand even diffractionsThis will challenge the communicationfor commercial UASs to carry out multiple missions in com-plex environments with strict regulations on flying distanceand height
In L-bandC-band the fading depths and fading periodsare different which indicates that the decay of multipath isalso related to the carrier frequency The modeling of thesmall-scale fading is introduced in the following section usingRice statistics tomodel Rician119870 factor with respect to height
33 Small-Scale Fading The Rician 119870 factor is an importantparameter to describe the signal behavior which has asignificant influence on the channel capacity It is a measureof the severity of fading where there is a LoS path from theTx to the Rx Generally the Rician 119870 factor is modeled eitheras a temporal variation on the fixed wireless links [20] or asdistance-dependent [21]
331 Estimation of Rician 119870 Factors Rician distribution isnormally used to describe the small-scale fading when thereis a dominant component such as a LoS path In our case theUAV is in LoS during the whole measurements and thus theRician119870 factor is suitable to evaluate the fading behavior Fig-ure 8 gives the probability density functions ofmeasurementsV4 and H2 for L-bandC-band using data normalized by a20-wavelength root mean square [21] which are well fitted inRician distributions119870 factor is estimated using themoment-method approach [22]
119870 =1003816100381610038161003816120585100381610038161003816100381621205902
100381610038161003816100381612058510038161003816100381610038162 = [1198661198862 minus 119866V2]12
1205902 = 119866119886 minus 100381610038161003816100381612058510038161003816100381610038162 (2)
6 Wireless Communications and Mobile Computing
H2 L-bandRician fitting
V4 L-bandRician fitting
H2 C-bandRician fitting
V4 C-bandRician fitting
0
01
02
03
04
05
06
07
08
09
0
02
04
06
08
1
12
0
01
02
03
04
05
06
07
08
0
01
02
03
04
05
06
07
08
09
10 05 215Envelope level
10 05 25215Envelope level
150 21 2505Envelope level
150 21 2505Envelope level
Figure 8 Probability density functions of the measurements
where119866119886 is the firstmoment of the power gain (119866) (which canbe calculated by finite data) and119866V is the secondmoment of119866about 119866119886 indicating the root mean square (RMS) fluctuationThe RMS is set at a length of 20 wavelengths 119870 factor iscalculated every 5m which contains around 60 samples inaverage and is considered large enough to obtain correctresults in our test environment [23]
332 Rician 119870 Factors Modeling In [24] the author pro-posed a Rician 119870 factor model for a UAV channel based onmeasurement at altitudes from 500 to 2000m The modelconsiders the 119870 factor as a linear function of distance andthe author states that the 119870 factor is nearly constant in hismeasurement
119870 (119877) = 1198700 + 119899119870 (119877 minus 119877min) + 119884 (3)
where 1198700 is a constant value for distance 119877min and 119884 is thezero-mean Gaussian random variable with standard devia-tion 120590119884 We fit the parameters of this model based on themeasurements at heights of 10m (H1) and 30m (H2) respec-tively for L-bandC-band The results are given in Table 3
Table 3 Fitting parameters of model in (3) based on horizontalmeasurements (119877min = 30m)
Band Height 119899119870 1198700 120590119884 Average Estimation
L-band 10m 00055 429 340 446 36030m 00082 728 413 750 725
C-band 10m 00805 352 288 580 30330m 00136 962 315 998 1142
The triangle dots in Figure 9 denote the statistic 119870 factors ofmeasurements H1 and H2 and the straight lines are fittingsof the model shown in (3) As observed the 119870 factor isalmost constant during the horizontal flights However thehorizontal119870 factor varies at different heightswith a differenceof 3ndash8 dB
According to the analysis of 119870 factor for different flyingtrajectories it is convincing that the fading behavior is morerelated to the flying height instead of the distance at ultralowaltitude When the altitude of UAV is very low the scatterersnear the ground give strong multipath fading to the channel
Wireless Communications and Mobile Computing 7
H1H2
Horizontal distance (m) C-band3020 60 70 90
H1H2
40 50 80minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
30 7050 8020 906040Horizontal distance (m) L-band
Figure 9 Rician 119870 factor with respect to the horizontal distance forL-bandC-band
When the UAV gets higher the effects of scatterers mitigateOnce the UAV reaches above BP the channel gets rid ofthe reflection from scatterers on the ground and hence thequality of the channel improves greatly and approaches thefree-space model Considering that the fading characteristicsrely on height instead of the elevation angle or the distancea height-dependent Rician 119870 factor model is proposed asfollows
119870 (119877) =
1198621 + 1198991ℎ + 1198841 ℎ lt BP1198622 + 1198992ℎ + 1198842 ℎ gt BP (4)
The parameters fitted are given in Table 4119870 factor in the last column of Table 3 is estimated using
the proposed model in (4) Comparing it to the average 119870factor calculated by horizontal measurements at 10m and
Table 4 Parameters of the proposed 119870 model at L-bandC-band
Band Height lt BP Height gt BP1198621 1198991 1205901198841 1198622 1198992 1205901198842
L-band 177 01829 265 952 00294 214C-band minus117 04195 368 1438 00345 293
30m heights we can observe that the estimation is goodenough and the error is very small
The distributions of 119870 factor are depicted in Figure 10which clearly shows high dependency on height It also showstwo tendencies in two zones and the BP estimated is around50m for L-band and 40m for C-band based on the leastsquare method This is due to the lower propagation lossesat lower frequencies which allows higher order reflections toaffect propagation
The cumulative probability distributions of the 119870 factorsof all measurements are illustrated in Figure 11 which clearlyreveals the effect of height and the difference of the twofrequency bands Generally the 119870 factor in the C-band ishigher than that in the L-band and is increasing before BPwhile after BP it tends to be constant
4 Validation of Measurements by Simulation
In this section a simulation was performed to explain theunderlying propagation mechanism of the ldquobreakpointrdquoyet more measurements under different scenarios are stillnecessary for further verification
Assuming there exists a reflection from the sidewall of theobstacle as depicted in Figure 12 we get a ldquoreversedrdquo two-raymodel where 119867119887 is the height of the obstacle and ℎ119903 is theheight of the reflection point During the ascent process ofUAV the reflection point is synchronously moving up untilthe UAV reaches a certain height after which the reflectionpoint disappears Such behavior can result in a decreaseof multipath components which meets our observations inmeasurements Assuming the distance from the Tx and theRx to the reflecting plane of the obstacle is 119889119905 and 119889119903respectively by ignoring the height of Rx which is muchlower than the obstacle ℎ119903 can be calculated as
ℎ119903 = 119889119903 sdot ℎ119889119903 + 119889119905 (5)
Modified from the flat earth two-ray (FE2R) model given in[25] the multiray model for 119873 paths is calculated as
119875119903 = 119875119905 ( 1205824120587)
1003816100381610038161003816100381610038161003816100381610038161003816radic119866LoS
119897LoS +119873
sum119894=1
119877119894radic119866NLoS119894119890minus119895Δ120601119894119897NLoS119894
10038161003816100381610038161003816100381610038161003816100381610038162
(6)
where 119875119905 is the transmitting power 119866LoS and 119866NLoS are thetotal antenna gain for LoS ray and for NLoS ray respectively119897LoS is the traveling distance of the LoS path and 119897NLoS is thetraveling distance of NLoS paths
8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Wireless Communications and Mobile Computing
the literature [9] yet the altitudes are still higher than 200m Therefore it is necessary to investigate and model thepropagation channel of small UAVs at heights from 0 to100m In this range of heights the propagation is seriouslyaffected by the environment and the heights of the adjoiningobstacles There is an increase of the average path lossesdue to deep fast fading Some reports concerned with thisphenomenon at low altitudes have been given [8 10] andsimulations made by ray tracing methods [11] can explainthe effects of the reflection diffraction and scattering of theenvironment on low altitude AG channels
In [12] the author conducted measurements at differentdistances and altitudes with a small UAV using 80211 net-works where an interesting phenomenon of the impact ofheight on the propagation channel was observed In [13] aheight-dependent model based on ray tracing methods hasbeen proposed However more literature focuses on the ele-vation angle of the link distance of UAVs In [14] the aircraftwas flying circularly around the base station to investigatethe impact of the angle In [11 15] ray tracing methodswere applied to investigate the propagation channel in urbanenvironments and in [16] wideband measurements wereconductedwith aUAVbeing fixed at a certain position whichdepicts the influence of the ground In [17] narrowband andwideband channel measurements were introduced using LTEsignals In general there is still limited literature onmodelingat ultralow altitude for small UAVs
In our case we have investigated the variations of thepropagation channel within the flying range of small- andmedium-sized UAVs Measurements of different flight routesin a semiurban complex environment have been done toobtain data of different positions The analysis of measure-ment results shows that small-scale fading has high depen-dency on the flying height instead of the elevation angle orthe distance The structure of this paper is organized asfollows Section 2 introduces the measurement equipmentconfiguration and details of themeasurement campaign Sec-tion 3 analyzes the data and proposes a path loss model anda height-dependent Rician 119870 factor model Then Section 4gives a simulation of the model proposed Conclusions aregiven in Section 5
2 Measurement
21 Measurement System The testbed is composed of a lightcontinuous wave transmitter installed at the lower part of amedium-sized UAV The test transmitter can work in L- andC-bandswith amaximum transmitting power of 30 dBmThefrequencies used for measurements are 1200MHz for L-bandand 4200MHz for C-band respectively The transmittingantennas used on the UAV are two cloverleaf antennasworking in L- and C-bands respectively These antennashave circular polarization with an omnidirectional radiationpattern on the horizontal plane and a 3 dB beamwidth of 60∘for L-band and 55∘ for C-band The antennas were installedon the bottom of theUAVpointing straight down as shown inFigure 1 tominimize interferences from theUAV structure Inour case the UAV used has a very good azimuthal stabilityso that we could have used even linear polarization in
Tx
Rx
UAV
Figure 1 UAV and the test environment
Building 2
Building 1
Building 3
Containers
RxV2
V3V4
V1
Figure 2 Measurement environment from Google Earth
the UAV with a minimum error Nevertheless cloverleafcircularly polarized antennas are widely used for small UAVsand we can minimize the polarization errors using circularpolarization in the UAV and linear polarization in the groundstation
The receiving system consists of two antennas of typeMGRM-WHF with 20 cm separation The antenna is ver-tically polarized with a gain of 3ndash5 dB and its half-powerbeamwidth in elevation is 50∘ The antennas were installedon a 15m mast The Rx was a standard portable spectrumanalyzer with customized software to record measurementsat a speed of 10 measurements per second The receiver hastwo channels and each was connected to one antenna Bothchannels received the same signal
The UAV is a hexacopter of 3 kg weight which is able tocarry a 2 kg payload and has 20 minutes of flying enduranceThe system was controlled with a 24GHz link and wasmonitored with a ground station where the telemetry dataof height speed and position were received The flights weremade with computer-assisted control software to guaranteethe accuracy of the trajectories
22 Measurement Campaigns The measurements were con-ducted in a suburban open environment as depicted inFigure 2 where there are many buildings metal containersand trees This environment is a multipath-rich environmentso that we can easily distinguish the influence of the flying
Wireless Communications and Mobile Computing 3
Table 1 Measurement trajectory details
Trajectory Direction Distance HeightV1 Vertical 20m 0ndash25mV2 Vertical 40m 0ndash50mV3 Vertical 60m 0ndash50mV4 Vertical 100m 0ndash100mH1 Horizontal 20ndash90m 10mH2 Horizontal 20ndash90m 30m
H1
H2
RxV1
V2V3
V4
Containers
Building 1 Building 2
Building 3
100 m
100 m
60m
50m
40 m20 m
25 m
0m
0m
Figure 3 Flight trajectories
height on the propagation Measurements were made withvertical and horizontal flights Vertical flight trajectories asshown with yellow lines in Figure 3 were conducted at analtitude from 0 to 100m with the UAV taking off and landingat several fixed distances from 20m to 100m away from theRx and the horizontal position was stabilized Vertical flightsguarantee that the influence of the environment remainsconstant and can accurately model the influence of the heightwith negligible influence from the antennas Several horizon-tal flights were also made with the UAV starting at a position20m away from Rx following a straight line forward withconstant altitude at 10m and 30m and landing at a position90m away from the Rx
The vertical ascending speed was monitored on theground station as 07m per second and the horizontalforward speed was around 12mper secondThe same flightswere made for L-band and C-band measurements All flightsensure that the LoS link between the Tx and the Rx is withinthe range of the antenna radiation patterns Details of themeasurement trajectories are shown in Table 1 To be clearwe use ldquoV1V2 rdquo to represent the specific measurementtrajectory in the rest of this paper
23 Calibration In this section the radiation patterns ofantennas were measured in an anechoic chamber of 6 times 3 times3m3 in order to calibrate the antennarsquos influence on thecomplete site
The UAV was installed on a rotating positioner withthe transmitting antennas placed on the bottom of it Bothazimuth and elevation planes were measured for the twocloverleaf antennas one for 12 GHz and one for 42GHzrespectively Depicted in Figure 4(a) are the measuredradiation patterns It can be observed that the elevationradiation patterns of these antennas have more than 60∘of 3 dB beamwidth with a uniform response and have not
Table 2 Path loss exponent 119899C-band L-band
Height 10m 30m 10m 30m119899 27631 26433 33464 29889
been influenced by the UAV In Figure 4(b) we presentthe measurements of the base station antennas which arecommercial antennas We present only measurements of theelevation planes with the base station antennas installed onthemast we used As we can see the radiation patterns can beusedwithminor error for directionswith elevations up to 60∘
Therefore we can postulate that the measurements areaccurate until 60∘ elevation angle for the UAV In fact themaximum elevation that we consider in the campaign is upto 45∘ which is much less than 60∘ The results also showthat the antenna radiation patterns exhibit smooth gains inthe azimuth-elevation ranges considered for acquiring thedata and thus the measured channel properties are mainlywith respect to the propagation characteristics with negligibleimpact from the antennas
3 Data Analysis and Results
31 Path Loss Modeling The horizontal measurements areused to determine the path loss exponent (PLE) 119899 of theconventional path loss model in this environment in whichPL(119863) results as follows
PL (119863) = PL (1198630) + 10119899 log10 ( 1198631198630) + 119883120590 (119870) (1)
where1198630 denotes the reference distance and119863 represents thelink distance between the Tx and the Rx 119863 equals radic1198892 + ℎ2where 119889 is the horizontal distance between Tx and Rx andℎ is the height of the UAV 119883120590(119870) is the small-scale fadingfollowing Rician distribution with different 119870 The values of119899 are given in Table 2
Hence the fittings of the path loss model based onhorizontal flights at 10m (measurement H1) and at 30m(measurement H2) for L-bandC-band are given in Figure 5The PLEs 119899 are from 264 to 335 which are typical values forsuburban areas
It is interesting that the value of 119899decreaseswhen theUAVheight increases which is also observed in measurements V3and V4 shown in Figure 6 It is noted that in [18] the PLE isalso found to decrease with the increase of the relative heightof the base station in railway viaduct scenarios and in [19]the PLE 119899 is measured and found to be less than 2 and isclose to free space when UAV is at an altitude higher than500m in a suburban environmentThus we consider that thepath loss has a tendency to declinewith the increasing ofUAVheights at low altitude while at a high altitude it approachesfree spaceThis phenomenon could be the consequence of thereduction of multipath during the ascending process of theUAV
32 Analysis of the Vertical Measurements We have observedthat the properties of the channel remain stable when the
4 Wireless Communications and Mobile Computing
0
30
4560
90120
135
150
180
Elevation plane pattern
Antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
Azimuth plane pattern
minus30 minus20 minus10 minus3 0
42 GHz12 GHz
(a) Transmitting antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
MGRM-WHF elevation plane
Frequency42 GHz12 GHz
(b) Receiving antenna (c) UAV with the transmitting antennas
Figure 4 Radiation patterns of the antennas
UAV flies within short ranges at a constant height Thus ver-tical measurements were made to investigate the propagationchannel with respect to height
Illustrated in Figure 6 are the results of measurementsV3 and V4 It is observed that the vertical measurementsconducted at different distances away from Rx show highsimilarity Strong fading is observed in both horizontal andvertical measurements at low altitudes which shows highdependency on UAVrsquos heights As observed in Figure 6 thereare two obvious propagation zonesThere are deep fading andextra losses in zone 1 while in zone 2 the power is moresimilar to free-space channel Therefore we have divided thechannel into two zones defined by a ldquobreakpointrdquo BP whichis around 45m in our test environment
It is noted that the observations about BP in narrowbandmeasurements in this paper are different from the prelim-inary work in [17] This is because the height of the basestation antennas applied in the preliminary work was around50 cm which was so low that there was an influence of thefirst Fresnel zone However in this work the antennas wereinstalled on a 15m high mast and thus the effect of the firstFresnel zone was minimized Of course there were otherminor things that is the signal-to-noise (SNR) ratio in thepreliminary work was not so high which also could result insuch differences
In this work the measurement equipment was wellcalibrated and the influence of antennas has been consideredAlso the measurements have been repeated several times in
Wireless Communications and Mobile Computing 5
Measurement H1 Measurement H2
Measurement H1 Measurement H2
Fit H1 L-band Fit H2 L-band
Fit H1 C-band Fit H2 C-band
minus70minus60minus50minus40minus30minus20
Rece
ived
pow
er (d
Bm)
40 9060 70 10030 50 80Distance link (m) L-band
60 9070 1004030 50 80Distance link (m) C-band
minus80
minus70
minus60
minus50
minus40
minus30
Rece
ived
pow
er (d
Bm)
Figure 5 Influence of the link distance on path loss for L-bandC-band
Zone 1
Zone 1
Zone 2
Zone 2
UAV height (m)
UAV height (m)Measurement V4 L-bandMeasurement V3 L-band
Measurement V4 C-bandMeasurement V3 C-bandFree-space model
Free-space model
10
10
20
20
30
30
40
40
50
50
60
60
70
70
80
80
90
90
100
100minus100
minus80
minus60
minus40
minus20
Rece
ived
pow
er (d
Bm)
minus100
minus80
minus60
minus40
Rece
ived
pow
er (d
Bm)
Figure 6 Comparison of the vertical measurements and the free-space model for L-bandC-band
order to rule out the impact of the randomnessThus a morethorough investigation can be conducted compared to theworks presented in [17]
Figure 7 illustrates the fast fading of measurements V3and V4 where large-scale fading has been removed bysubtracting a 20-wavelength moving average power from thereceived signal
As mentioned earlier the measurement site in our casehas many scattering obstacles (ie containers buildings andlots of trees) According to our measurement results we
Zone 1
Zone 1 Zone 2
Zone 2
L-band V4L-band V3
C-band V4C-band V3
0 10 20 30 40 50 60 70 80 90 100
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
10 20 7040 50 80 10030 90600Height (m)
Height (m)
Figure 7 Fading behavior with respect to height
notice that the propagation channel at ultralow altitude iseasily affected by those obstacles on the ground The signalreceived is considered as a composition of a large numberof waves originated from the LoS path multipath scatteringand even diffractionsThis will challenge the communicationfor commercial UASs to carry out multiple missions in com-plex environments with strict regulations on flying distanceand height
In L-bandC-band the fading depths and fading periodsare different which indicates that the decay of multipath isalso related to the carrier frequency The modeling of thesmall-scale fading is introduced in the following section usingRice statistics tomodel Rician119870 factor with respect to height
33 Small-Scale Fading The Rician 119870 factor is an importantparameter to describe the signal behavior which has asignificant influence on the channel capacity It is a measureof the severity of fading where there is a LoS path from theTx to the Rx Generally the Rician 119870 factor is modeled eitheras a temporal variation on the fixed wireless links [20] or asdistance-dependent [21]
331 Estimation of Rician 119870 Factors Rician distribution isnormally used to describe the small-scale fading when thereis a dominant component such as a LoS path In our case theUAV is in LoS during the whole measurements and thus theRician119870 factor is suitable to evaluate the fading behavior Fig-ure 8 gives the probability density functions ofmeasurementsV4 and H2 for L-bandC-band using data normalized by a20-wavelength root mean square [21] which are well fitted inRician distributions119870 factor is estimated using themoment-method approach [22]
119870 =1003816100381610038161003816120585100381610038161003816100381621205902
100381610038161003816100381612058510038161003816100381610038162 = [1198661198862 minus 119866V2]12
1205902 = 119866119886 minus 100381610038161003816100381612058510038161003816100381610038162 (2)
6 Wireless Communications and Mobile Computing
H2 L-bandRician fitting
V4 L-bandRician fitting
H2 C-bandRician fitting
V4 C-bandRician fitting
0
01
02
03
04
05
06
07
08
09
0
02
04
06
08
1
12
0
01
02
03
04
05
06
07
08
0
01
02
03
04
05
06
07
08
09
10 05 215Envelope level
10 05 25215Envelope level
150 21 2505Envelope level
150 21 2505Envelope level
Figure 8 Probability density functions of the measurements
where119866119886 is the firstmoment of the power gain (119866) (which canbe calculated by finite data) and119866V is the secondmoment of119866about 119866119886 indicating the root mean square (RMS) fluctuationThe RMS is set at a length of 20 wavelengths 119870 factor iscalculated every 5m which contains around 60 samples inaverage and is considered large enough to obtain correctresults in our test environment [23]
332 Rician 119870 Factors Modeling In [24] the author pro-posed a Rician 119870 factor model for a UAV channel based onmeasurement at altitudes from 500 to 2000m The modelconsiders the 119870 factor as a linear function of distance andthe author states that the 119870 factor is nearly constant in hismeasurement
119870 (119877) = 1198700 + 119899119870 (119877 minus 119877min) + 119884 (3)
where 1198700 is a constant value for distance 119877min and 119884 is thezero-mean Gaussian random variable with standard devia-tion 120590119884 We fit the parameters of this model based on themeasurements at heights of 10m (H1) and 30m (H2) respec-tively for L-bandC-band The results are given in Table 3
Table 3 Fitting parameters of model in (3) based on horizontalmeasurements (119877min = 30m)
Band Height 119899119870 1198700 120590119884 Average Estimation
L-band 10m 00055 429 340 446 36030m 00082 728 413 750 725
C-band 10m 00805 352 288 580 30330m 00136 962 315 998 1142
The triangle dots in Figure 9 denote the statistic 119870 factors ofmeasurements H1 and H2 and the straight lines are fittingsof the model shown in (3) As observed the 119870 factor isalmost constant during the horizontal flights However thehorizontal119870 factor varies at different heightswith a differenceof 3ndash8 dB
According to the analysis of 119870 factor for different flyingtrajectories it is convincing that the fading behavior is morerelated to the flying height instead of the distance at ultralowaltitude When the altitude of UAV is very low the scatterersnear the ground give strong multipath fading to the channel
Wireless Communications and Mobile Computing 7
H1H2
Horizontal distance (m) C-band3020 60 70 90
H1H2
40 50 80minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
30 7050 8020 906040Horizontal distance (m) L-band
Figure 9 Rician 119870 factor with respect to the horizontal distance forL-bandC-band
When the UAV gets higher the effects of scatterers mitigateOnce the UAV reaches above BP the channel gets rid ofthe reflection from scatterers on the ground and hence thequality of the channel improves greatly and approaches thefree-space model Considering that the fading characteristicsrely on height instead of the elevation angle or the distancea height-dependent Rician 119870 factor model is proposed asfollows
119870 (119877) =
1198621 + 1198991ℎ + 1198841 ℎ lt BP1198622 + 1198992ℎ + 1198842 ℎ gt BP (4)
The parameters fitted are given in Table 4119870 factor in the last column of Table 3 is estimated using
the proposed model in (4) Comparing it to the average 119870factor calculated by horizontal measurements at 10m and
Table 4 Parameters of the proposed 119870 model at L-bandC-band
Band Height lt BP Height gt BP1198621 1198991 1205901198841 1198622 1198992 1205901198842
L-band 177 01829 265 952 00294 214C-band minus117 04195 368 1438 00345 293
30m heights we can observe that the estimation is goodenough and the error is very small
The distributions of 119870 factor are depicted in Figure 10which clearly shows high dependency on height It also showstwo tendencies in two zones and the BP estimated is around50m for L-band and 40m for C-band based on the leastsquare method This is due to the lower propagation lossesat lower frequencies which allows higher order reflections toaffect propagation
The cumulative probability distributions of the 119870 factorsof all measurements are illustrated in Figure 11 which clearlyreveals the effect of height and the difference of the twofrequency bands Generally the 119870 factor in the C-band ishigher than that in the L-band and is increasing before BPwhile after BP it tends to be constant
4 Validation of Measurements by Simulation
In this section a simulation was performed to explain theunderlying propagation mechanism of the ldquobreakpointrdquoyet more measurements under different scenarios are stillnecessary for further verification
Assuming there exists a reflection from the sidewall of theobstacle as depicted in Figure 12 we get a ldquoreversedrdquo two-raymodel where 119867119887 is the height of the obstacle and ℎ119903 is theheight of the reflection point During the ascent process ofUAV the reflection point is synchronously moving up untilthe UAV reaches a certain height after which the reflectionpoint disappears Such behavior can result in a decreaseof multipath components which meets our observations inmeasurements Assuming the distance from the Tx and theRx to the reflecting plane of the obstacle is 119889119905 and 119889119903respectively by ignoring the height of Rx which is muchlower than the obstacle ℎ119903 can be calculated as
ℎ119903 = 119889119903 sdot ℎ119889119903 + 119889119905 (5)
Modified from the flat earth two-ray (FE2R) model given in[25] the multiray model for 119873 paths is calculated as
119875119903 = 119875119905 ( 1205824120587)
1003816100381610038161003816100381610038161003816100381610038161003816radic119866LoS
119897LoS +119873
sum119894=1
119877119894radic119866NLoS119894119890minus119895Δ120601119894119897NLoS119894
10038161003816100381610038161003816100381610038161003816100381610038162
(6)
where 119875119905 is the transmitting power 119866LoS and 119866NLoS are thetotal antenna gain for LoS ray and for NLoS ray respectively119897LoS is the traveling distance of the LoS path and 119897NLoS is thetraveling distance of NLoS paths
8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Wireless Communications and Mobile Computing 3
Table 1 Measurement trajectory details
Trajectory Direction Distance HeightV1 Vertical 20m 0ndash25mV2 Vertical 40m 0ndash50mV3 Vertical 60m 0ndash50mV4 Vertical 100m 0ndash100mH1 Horizontal 20ndash90m 10mH2 Horizontal 20ndash90m 30m
H1
H2
RxV1
V2V3
V4
Containers
Building 1 Building 2
Building 3
100 m
100 m
60m
50m
40 m20 m
25 m
0m
0m
Figure 3 Flight trajectories
height on the propagation Measurements were made withvertical and horizontal flights Vertical flight trajectories asshown with yellow lines in Figure 3 were conducted at analtitude from 0 to 100m with the UAV taking off and landingat several fixed distances from 20m to 100m away from theRx and the horizontal position was stabilized Vertical flightsguarantee that the influence of the environment remainsconstant and can accurately model the influence of the heightwith negligible influence from the antennas Several horizon-tal flights were also made with the UAV starting at a position20m away from Rx following a straight line forward withconstant altitude at 10m and 30m and landing at a position90m away from the Rx
The vertical ascending speed was monitored on theground station as 07m per second and the horizontalforward speed was around 12mper secondThe same flightswere made for L-band and C-band measurements All flightsensure that the LoS link between the Tx and the Rx is withinthe range of the antenna radiation patterns Details of themeasurement trajectories are shown in Table 1 To be clearwe use ldquoV1V2 rdquo to represent the specific measurementtrajectory in the rest of this paper
23 Calibration In this section the radiation patterns ofantennas were measured in an anechoic chamber of 6 times 3 times3m3 in order to calibrate the antennarsquos influence on thecomplete site
The UAV was installed on a rotating positioner withthe transmitting antennas placed on the bottom of it Bothazimuth and elevation planes were measured for the twocloverleaf antennas one for 12 GHz and one for 42GHzrespectively Depicted in Figure 4(a) are the measuredradiation patterns It can be observed that the elevationradiation patterns of these antennas have more than 60∘of 3 dB beamwidth with a uniform response and have not
Table 2 Path loss exponent 119899C-band L-band
Height 10m 30m 10m 30m119899 27631 26433 33464 29889
been influenced by the UAV In Figure 4(b) we presentthe measurements of the base station antennas which arecommercial antennas We present only measurements of theelevation planes with the base station antennas installed onthemast we used As we can see the radiation patterns can beusedwithminor error for directionswith elevations up to 60∘
Therefore we can postulate that the measurements areaccurate until 60∘ elevation angle for the UAV In fact themaximum elevation that we consider in the campaign is upto 45∘ which is much less than 60∘ The results also showthat the antenna radiation patterns exhibit smooth gains inthe azimuth-elevation ranges considered for acquiring thedata and thus the measured channel properties are mainlywith respect to the propagation characteristics with negligibleimpact from the antennas
3 Data Analysis and Results
31 Path Loss Modeling The horizontal measurements areused to determine the path loss exponent (PLE) 119899 of theconventional path loss model in this environment in whichPL(119863) results as follows
PL (119863) = PL (1198630) + 10119899 log10 ( 1198631198630) + 119883120590 (119870) (1)
where1198630 denotes the reference distance and119863 represents thelink distance between the Tx and the Rx 119863 equals radic1198892 + ℎ2where 119889 is the horizontal distance between Tx and Rx andℎ is the height of the UAV 119883120590(119870) is the small-scale fadingfollowing Rician distribution with different 119870 The values of119899 are given in Table 2
Hence the fittings of the path loss model based onhorizontal flights at 10m (measurement H1) and at 30m(measurement H2) for L-bandC-band are given in Figure 5The PLEs 119899 are from 264 to 335 which are typical values forsuburban areas
It is interesting that the value of 119899decreaseswhen theUAVheight increases which is also observed in measurements V3and V4 shown in Figure 6 It is noted that in [18] the PLE isalso found to decrease with the increase of the relative heightof the base station in railway viaduct scenarios and in [19]the PLE 119899 is measured and found to be less than 2 and isclose to free space when UAV is at an altitude higher than500m in a suburban environmentThus we consider that thepath loss has a tendency to declinewith the increasing ofUAVheights at low altitude while at a high altitude it approachesfree spaceThis phenomenon could be the consequence of thereduction of multipath during the ascending process of theUAV
32 Analysis of the Vertical Measurements We have observedthat the properties of the channel remain stable when the
4 Wireless Communications and Mobile Computing
0
30
4560
90120
135
150
180
Elevation plane pattern
Antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
Azimuth plane pattern
minus30 minus20 minus10 minus3 0
42 GHz12 GHz
(a) Transmitting antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
MGRM-WHF elevation plane
Frequency42 GHz12 GHz
(b) Receiving antenna (c) UAV with the transmitting antennas
Figure 4 Radiation patterns of the antennas
UAV flies within short ranges at a constant height Thus ver-tical measurements were made to investigate the propagationchannel with respect to height
Illustrated in Figure 6 are the results of measurementsV3 and V4 It is observed that the vertical measurementsconducted at different distances away from Rx show highsimilarity Strong fading is observed in both horizontal andvertical measurements at low altitudes which shows highdependency on UAVrsquos heights As observed in Figure 6 thereare two obvious propagation zonesThere are deep fading andextra losses in zone 1 while in zone 2 the power is moresimilar to free-space channel Therefore we have divided thechannel into two zones defined by a ldquobreakpointrdquo BP whichis around 45m in our test environment
It is noted that the observations about BP in narrowbandmeasurements in this paper are different from the prelim-inary work in [17] This is because the height of the basestation antennas applied in the preliminary work was around50 cm which was so low that there was an influence of thefirst Fresnel zone However in this work the antennas wereinstalled on a 15m high mast and thus the effect of the firstFresnel zone was minimized Of course there were otherminor things that is the signal-to-noise (SNR) ratio in thepreliminary work was not so high which also could result insuch differences
In this work the measurement equipment was wellcalibrated and the influence of antennas has been consideredAlso the measurements have been repeated several times in
Wireless Communications and Mobile Computing 5
Measurement H1 Measurement H2
Measurement H1 Measurement H2
Fit H1 L-band Fit H2 L-band
Fit H1 C-band Fit H2 C-band
minus70minus60minus50minus40minus30minus20
Rece
ived
pow
er (d
Bm)
40 9060 70 10030 50 80Distance link (m) L-band
60 9070 1004030 50 80Distance link (m) C-band
minus80
minus70
minus60
minus50
minus40
minus30
Rece
ived
pow
er (d
Bm)
Figure 5 Influence of the link distance on path loss for L-bandC-band
Zone 1
Zone 1
Zone 2
Zone 2
UAV height (m)
UAV height (m)Measurement V4 L-bandMeasurement V3 L-band
Measurement V4 C-bandMeasurement V3 C-bandFree-space model
Free-space model
10
10
20
20
30
30
40
40
50
50
60
60
70
70
80
80
90
90
100
100minus100
minus80
minus60
minus40
minus20
Rece
ived
pow
er (d
Bm)
minus100
minus80
minus60
minus40
Rece
ived
pow
er (d
Bm)
Figure 6 Comparison of the vertical measurements and the free-space model for L-bandC-band
order to rule out the impact of the randomnessThus a morethorough investigation can be conducted compared to theworks presented in [17]
Figure 7 illustrates the fast fading of measurements V3and V4 where large-scale fading has been removed bysubtracting a 20-wavelength moving average power from thereceived signal
As mentioned earlier the measurement site in our casehas many scattering obstacles (ie containers buildings andlots of trees) According to our measurement results we
Zone 1
Zone 1 Zone 2
Zone 2
L-band V4L-band V3
C-band V4C-band V3
0 10 20 30 40 50 60 70 80 90 100
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
10 20 7040 50 80 10030 90600Height (m)
Height (m)
Figure 7 Fading behavior with respect to height
notice that the propagation channel at ultralow altitude iseasily affected by those obstacles on the ground The signalreceived is considered as a composition of a large numberof waves originated from the LoS path multipath scatteringand even diffractionsThis will challenge the communicationfor commercial UASs to carry out multiple missions in com-plex environments with strict regulations on flying distanceand height
In L-bandC-band the fading depths and fading periodsare different which indicates that the decay of multipath isalso related to the carrier frequency The modeling of thesmall-scale fading is introduced in the following section usingRice statistics tomodel Rician119870 factor with respect to height
33 Small-Scale Fading The Rician 119870 factor is an importantparameter to describe the signal behavior which has asignificant influence on the channel capacity It is a measureof the severity of fading where there is a LoS path from theTx to the Rx Generally the Rician 119870 factor is modeled eitheras a temporal variation on the fixed wireless links [20] or asdistance-dependent [21]
331 Estimation of Rician 119870 Factors Rician distribution isnormally used to describe the small-scale fading when thereis a dominant component such as a LoS path In our case theUAV is in LoS during the whole measurements and thus theRician119870 factor is suitable to evaluate the fading behavior Fig-ure 8 gives the probability density functions ofmeasurementsV4 and H2 for L-bandC-band using data normalized by a20-wavelength root mean square [21] which are well fitted inRician distributions119870 factor is estimated using themoment-method approach [22]
119870 =1003816100381610038161003816120585100381610038161003816100381621205902
100381610038161003816100381612058510038161003816100381610038162 = [1198661198862 minus 119866V2]12
1205902 = 119866119886 minus 100381610038161003816100381612058510038161003816100381610038162 (2)
6 Wireless Communications and Mobile Computing
H2 L-bandRician fitting
V4 L-bandRician fitting
H2 C-bandRician fitting
V4 C-bandRician fitting
0
01
02
03
04
05
06
07
08
09
0
02
04
06
08
1
12
0
01
02
03
04
05
06
07
08
0
01
02
03
04
05
06
07
08
09
10 05 215Envelope level
10 05 25215Envelope level
150 21 2505Envelope level
150 21 2505Envelope level
Figure 8 Probability density functions of the measurements
where119866119886 is the firstmoment of the power gain (119866) (which canbe calculated by finite data) and119866V is the secondmoment of119866about 119866119886 indicating the root mean square (RMS) fluctuationThe RMS is set at a length of 20 wavelengths 119870 factor iscalculated every 5m which contains around 60 samples inaverage and is considered large enough to obtain correctresults in our test environment [23]
332 Rician 119870 Factors Modeling In [24] the author pro-posed a Rician 119870 factor model for a UAV channel based onmeasurement at altitudes from 500 to 2000m The modelconsiders the 119870 factor as a linear function of distance andthe author states that the 119870 factor is nearly constant in hismeasurement
119870 (119877) = 1198700 + 119899119870 (119877 minus 119877min) + 119884 (3)
where 1198700 is a constant value for distance 119877min and 119884 is thezero-mean Gaussian random variable with standard devia-tion 120590119884 We fit the parameters of this model based on themeasurements at heights of 10m (H1) and 30m (H2) respec-tively for L-bandC-band The results are given in Table 3
Table 3 Fitting parameters of model in (3) based on horizontalmeasurements (119877min = 30m)
Band Height 119899119870 1198700 120590119884 Average Estimation
L-band 10m 00055 429 340 446 36030m 00082 728 413 750 725
C-band 10m 00805 352 288 580 30330m 00136 962 315 998 1142
The triangle dots in Figure 9 denote the statistic 119870 factors ofmeasurements H1 and H2 and the straight lines are fittingsof the model shown in (3) As observed the 119870 factor isalmost constant during the horizontal flights However thehorizontal119870 factor varies at different heightswith a differenceof 3ndash8 dB
According to the analysis of 119870 factor for different flyingtrajectories it is convincing that the fading behavior is morerelated to the flying height instead of the distance at ultralowaltitude When the altitude of UAV is very low the scatterersnear the ground give strong multipath fading to the channel
Wireless Communications and Mobile Computing 7
H1H2
Horizontal distance (m) C-band3020 60 70 90
H1H2
40 50 80minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
30 7050 8020 906040Horizontal distance (m) L-band
Figure 9 Rician 119870 factor with respect to the horizontal distance forL-bandC-band
When the UAV gets higher the effects of scatterers mitigateOnce the UAV reaches above BP the channel gets rid ofthe reflection from scatterers on the ground and hence thequality of the channel improves greatly and approaches thefree-space model Considering that the fading characteristicsrely on height instead of the elevation angle or the distancea height-dependent Rician 119870 factor model is proposed asfollows
119870 (119877) =
1198621 + 1198991ℎ + 1198841 ℎ lt BP1198622 + 1198992ℎ + 1198842 ℎ gt BP (4)
The parameters fitted are given in Table 4119870 factor in the last column of Table 3 is estimated using
the proposed model in (4) Comparing it to the average 119870factor calculated by horizontal measurements at 10m and
Table 4 Parameters of the proposed 119870 model at L-bandC-band
Band Height lt BP Height gt BP1198621 1198991 1205901198841 1198622 1198992 1205901198842
L-band 177 01829 265 952 00294 214C-band minus117 04195 368 1438 00345 293
30m heights we can observe that the estimation is goodenough and the error is very small
The distributions of 119870 factor are depicted in Figure 10which clearly shows high dependency on height It also showstwo tendencies in two zones and the BP estimated is around50m for L-band and 40m for C-band based on the leastsquare method This is due to the lower propagation lossesat lower frequencies which allows higher order reflections toaffect propagation
The cumulative probability distributions of the 119870 factorsof all measurements are illustrated in Figure 11 which clearlyreveals the effect of height and the difference of the twofrequency bands Generally the 119870 factor in the C-band ishigher than that in the L-band and is increasing before BPwhile after BP it tends to be constant
4 Validation of Measurements by Simulation
In this section a simulation was performed to explain theunderlying propagation mechanism of the ldquobreakpointrdquoyet more measurements under different scenarios are stillnecessary for further verification
Assuming there exists a reflection from the sidewall of theobstacle as depicted in Figure 12 we get a ldquoreversedrdquo two-raymodel where 119867119887 is the height of the obstacle and ℎ119903 is theheight of the reflection point During the ascent process ofUAV the reflection point is synchronously moving up untilthe UAV reaches a certain height after which the reflectionpoint disappears Such behavior can result in a decreaseof multipath components which meets our observations inmeasurements Assuming the distance from the Tx and theRx to the reflecting plane of the obstacle is 119889119905 and 119889119903respectively by ignoring the height of Rx which is muchlower than the obstacle ℎ119903 can be calculated as
ℎ119903 = 119889119903 sdot ℎ119889119903 + 119889119905 (5)
Modified from the flat earth two-ray (FE2R) model given in[25] the multiray model for 119873 paths is calculated as
119875119903 = 119875119905 ( 1205824120587)
1003816100381610038161003816100381610038161003816100381610038161003816radic119866LoS
119897LoS +119873
sum119894=1
119877119894radic119866NLoS119894119890minus119895Δ120601119894119897NLoS119894
10038161003816100381610038161003816100381610038161003816100381610038162
(6)
where 119875119905 is the transmitting power 119866LoS and 119866NLoS are thetotal antenna gain for LoS ray and for NLoS ray respectively119897LoS is the traveling distance of the LoS path and 119897NLoS is thetraveling distance of NLoS paths
8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Wireless Communications and Mobile Computing
0
30
4560
90120
135
150
180
Elevation plane pattern
Antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
Azimuth plane pattern
minus30 minus20 minus10 minus3 0
42 GHz12 GHz
(a) Transmitting antenna
0
30
6090
120
150
180
210
240270
300
330
minus30
minus20
minus10
minus30
MGRM-WHF elevation plane
Frequency42 GHz12 GHz
(b) Receiving antenna (c) UAV with the transmitting antennas
Figure 4 Radiation patterns of the antennas
UAV flies within short ranges at a constant height Thus ver-tical measurements were made to investigate the propagationchannel with respect to height
Illustrated in Figure 6 are the results of measurementsV3 and V4 It is observed that the vertical measurementsconducted at different distances away from Rx show highsimilarity Strong fading is observed in both horizontal andvertical measurements at low altitudes which shows highdependency on UAVrsquos heights As observed in Figure 6 thereare two obvious propagation zonesThere are deep fading andextra losses in zone 1 while in zone 2 the power is moresimilar to free-space channel Therefore we have divided thechannel into two zones defined by a ldquobreakpointrdquo BP whichis around 45m in our test environment
It is noted that the observations about BP in narrowbandmeasurements in this paper are different from the prelim-inary work in [17] This is because the height of the basestation antennas applied in the preliminary work was around50 cm which was so low that there was an influence of thefirst Fresnel zone However in this work the antennas wereinstalled on a 15m high mast and thus the effect of the firstFresnel zone was minimized Of course there were otherminor things that is the signal-to-noise (SNR) ratio in thepreliminary work was not so high which also could result insuch differences
In this work the measurement equipment was wellcalibrated and the influence of antennas has been consideredAlso the measurements have been repeated several times in
Wireless Communications and Mobile Computing 5
Measurement H1 Measurement H2
Measurement H1 Measurement H2
Fit H1 L-band Fit H2 L-band
Fit H1 C-band Fit H2 C-band
minus70minus60minus50minus40minus30minus20
Rece
ived
pow
er (d
Bm)
40 9060 70 10030 50 80Distance link (m) L-band
60 9070 1004030 50 80Distance link (m) C-band
minus80
minus70
minus60
minus50
minus40
minus30
Rece
ived
pow
er (d
Bm)
Figure 5 Influence of the link distance on path loss for L-bandC-band
Zone 1
Zone 1
Zone 2
Zone 2
UAV height (m)
UAV height (m)Measurement V4 L-bandMeasurement V3 L-band
Measurement V4 C-bandMeasurement V3 C-bandFree-space model
Free-space model
10
10
20
20
30
30
40
40
50
50
60
60
70
70
80
80
90
90
100
100minus100
minus80
minus60
minus40
minus20
Rece
ived
pow
er (d
Bm)
minus100
minus80
minus60
minus40
Rece
ived
pow
er (d
Bm)
Figure 6 Comparison of the vertical measurements and the free-space model for L-bandC-band
order to rule out the impact of the randomnessThus a morethorough investigation can be conducted compared to theworks presented in [17]
Figure 7 illustrates the fast fading of measurements V3and V4 where large-scale fading has been removed bysubtracting a 20-wavelength moving average power from thereceived signal
As mentioned earlier the measurement site in our casehas many scattering obstacles (ie containers buildings andlots of trees) According to our measurement results we
Zone 1
Zone 1 Zone 2
Zone 2
L-band V4L-band V3
C-band V4C-band V3
0 10 20 30 40 50 60 70 80 90 100
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
10 20 7040 50 80 10030 90600Height (m)
Height (m)
Figure 7 Fading behavior with respect to height
notice that the propagation channel at ultralow altitude iseasily affected by those obstacles on the ground The signalreceived is considered as a composition of a large numberof waves originated from the LoS path multipath scatteringand even diffractionsThis will challenge the communicationfor commercial UASs to carry out multiple missions in com-plex environments with strict regulations on flying distanceand height
In L-bandC-band the fading depths and fading periodsare different which indicates that the decay of multipath isalso related to the carrier frequency The modeling of thesmall-scale fading is introduced in the following section usingRice statistics tomodel Rician119870 factor with respect to height
33 Small-Scale Fading The Rician 119870 factor is an importantparameter to describe the signal behavior which has asignificant influence on the channel capacity It is a measureof the severity of fading where there is a LoS path from theTx to the Rx Generally the Rician 119870 factor is modeled eitheras a temporal variation on the fixed wireless links [20] or asdistance-dependent [21]
331 Estimation of Rician 119870 Factors Rician distribution isnormally used to describe the small-scale fading when thereis a dominant component such as a LoS path In our case theUAV is in LoS during the whole measurements and thus theRician119870 factor is suitable to evaluate the fading behavior Fig-ure 8 gives the probability density functions ofmeasurementsV4 and H2 for L-bandC-band using data normalized by a20-wavelength root mean square [21] which are well fitted inRician distributions119870 factor is estimated using themoment-method approach [22]
119870 =1003816100381610038161003816120585100381610038161003816100381621205902
100381610038161003816100381612058510038161003816100381610038162 = [1198661198862 minus 119866V2]12
1205902 = 119866119886 minus 100381610038161003816100381612058510038161003816100381610038162 (2)
6 Wireless Communications and Mobile Computing
H2 L-bandRician fitting
V4 L-bandRician fitting
H2 C-bandRician fitting
V4 C-bandRician fitting
0
01
02
03
04
05
06
07
08
09
0
02
04
06
08
1
12
0
01
02
03
04
05
06
07
08
0
01
02
03
04
05
06
07
08
09
10 05 215Envelope level
10 05 25215Envelope level
150 21 2505Envelope level
150 21 2505Envelope level
Figure 8 Probability density functions of the measurements
where119866119886 is the firstmoment of the power gain (119866) (which canbe calculated by finite data) and119866V is the secondmoment of119866about 119866119886 indicating the root mean square (RMS) fluctuationThe RMS is set at a length of 20 wavelengths 119870 factor iscalculated every 5m which contains around 60 samples inaverage and is considered large enough to obtain correctresults in our test environment [23]
332 Rician 119870 Factors Modeling In [24] the author pro-posed a Rician 119870 factor model for a UAV channel based onmeasurement at altitudes from 500 to 2000m The modelconsiders the 119870 factor as a linear function of distance andthe author states that the 119870 factor is nearly constant in hismeasurement
119870 (119877) = 1198700 + 119899119870 (119877 minus 119877min) + 119884 (3)
where 1198700 is a constant value for distance 119877min and 119884 is thezero-mean Gaussian random variable with standard devia-tion 120590119884 We fit the parameters of this model based on themeasurements at heights of 10m (H1) and 30m (H2) respec-tively for L-bandC-band The results are given in Table 3
Table 3 Fitting parameters of model in (3) based on horizontalmeasurements (119877min = 30m)
Band Height 119899119870 1198700 120590119884 Average Estimation
L-band 10m 00055 429 340 446 36030m 00082 728 413 750 725
C-band 10m 00805 352 288 580 30330m 00136 962 315 998 1142
The triangle dots in Figure 9 denote the statistic 119870 factors ofmeasurements H1 and H2 and the straight lines are fittingsof the model shown in (3) As observed the 119870 factor isalmost constant during the horizontal flights However thehorizontal119870 factor varies at different heightswith a differenceof 3ndash8 dB
According to the analysis of 119870 factor for different flyingtrajectories it is convincing that the fading behavior is morerelated to the flying height instead of the distance at ultralowaltitude When the altitude of UAV is very low the scatterersnear the ground give strong multipath fading to the channel
Wireless Communications and Mobile Computing 7
H1H2
Horizontal distance (m) C-band3020 60 70 90
H1H2
40 50 80minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
30 7050 8020 906040Horizontal distance (m) L-band
Figure 9 Rician 119870 factor with respect to the horizontal distance forL-bandC-band
When the UAV gets higher the effects of scatterers mitigateOnce the UAV reaches above BP the channel gets rid ofthe reflection from scatterers on the ground and hence thequality of the channel improves greatly and approaches thefree-space model Considering that the fading characteristicsrely on height instead of the elevation angle or the distancea height-dependent Rician 119870 factor model is proposed asfollows
119870 (119877) =
1198621 + 1198991ℎ + 1198841 ℎ lt BP1198622 + 1198992ℎ + 1198842 ℎ gt BP (4)
The parameters fitted are given in Table 4119870 factor in the last column of Table 3 is estimated using
the proposed model in (4) Comparing it to the average 119870factor calculated by horizontal measurements at 10m and
Table 4 Parameters of the proposed 119870 model at L-bandC-band
Band Height lt BP Height gt BP1198621 1198991 1205901198841 1198622 1198992 1205901198842
L-band 177 01829 265 952 00294 214C-band minus117 04195 368 1438 00345 293
30m heights we can observe that the estimation is goodenough and the error is very small
The distributions of 119870 factor are depicted in Figure 10which clearly shows high dependency on height It also showstwo tendencies in two zones and the BP estimated is around50m for L-band and 40m for C-band based on the leastsquare method This is due to the lower propagation lossesat lower frequencies which allows higher order reflections toaffect propagation
The cumulative probability distributions of the 119870 factorsof all measurements are illustrated in Figure 11 which clearlyreveals the effect of height and the difference of the twofrequency bands Generally the 119870 factor in the C-band ishigher than that in the L-band and is increasing before BPwhile after BP it tends to be constant
4 Validation of Measurements by Simulation
In this section a simulation was performed to explain theunderlying propagation mechanism of the ldquobreakpointrdquoyet more measurements under different scenarios are stillnecessary for further verification
Assuming there exists a reflection from the sidewall of theobstacle as depicted in Figure 12 we get a ldquoreversedrdquo two-raymodel where 119867119887 is the height of the obstacle and ℎ119903 is theheight of the reflection point During the ascent process ofUAV the reflection point is synchronously moving up untilthe UAV reaches a certain height after which the reflectionpoint disappears Such behavior can result in a decreaseof multipath components which meets our observations inmeasurements Assuming the distance from the Tx and theRx to the reflecting plane of the obstacle is 119889119905 and 119889119903respectively by ignoring the height of Rx which is muchlower than the obstacle ℎ119903 can be calculated as
ℎ119903 = 119889119903 sdot ℎ119889119903 + 119889119905 (5)
Modified from the flat earth two-ray (FE2R) model given in[25] the multiray model for 119873 paths is calculated as
119875119903 = 119875119905 ( 1205824120587)
1003816100381610038161003816100381610038161003816100381610038161003816radic119866LoS
119897LoS +119873
sum119894=1
119877119894radic119866NLoS119894119890minus119895Δ120601119894119897NLoS119894
10038161003816100381610038161003816100381610038161003816100381610038162
(6)
where 119875119905 is the transmitting power 119866LoS and 119866NLoS are thetotal antenna gain for LoS ray and for NLoS ray respectively119897LoS is the traveling distance of the LoS path and 119897NLoS is thetraveling distance of NLoS paths
8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Wireless Communications and Mobile Computing 5
Measurement H1 Measurement H2
Measurement H1 Measurement H2
Fit H1 L-band Fit H2 L-band
Fit H1 C-band Fit H2 C-band
minus70minus60minus50minus40minus30minus20
Rece
ived
pow
er (d
Bm)
40 9060 70 10030 50 80Distance link (m) L-band
60 9070 1004030 50 80Distance link (m) C-band
minus80
minus70
minus60
minus50
minus40
minus30
Rece
ived
pow
er (d
Bm)
Figure 5 Influence of the link distance on path loss for L-bandC-band
Zone 1
Zone 1
Zone 2
Zone 2
UAV height (m)
UAV height (m)Measurement V4 L-bandMeasurement V3 L-band
Measurement V4 C-bandMeasurement V3 C-bandFree-space model
Free-space model
10
10
20
20
30
30
40
40
50
50
60
60
70
70
80
80
90
90
100
100minus100
minus80
minus60
minus40
minus20
Rece
ived
pow
er (d
Bm)
minus100
minus80
minus60
minus40
Rece
ived
pow
er (d
Bm)
Figure 6 Comparison of the vertical measurements and the free-space model for L-bandC-band
order to rule out the impact of the randomnessThus a morethorough investigation can be conducted compared to theworks presented in [17]
Figure 7 illustrates the fast fading of measurements V3and V4 where large-scale fading has been removed bysubtracting a 20-wavelength moving average power from thereceived signal
As mentioned earlier the measurement site in our casehas many scattering obstacles (ie containers buildings andlots of trees) According to our measurement results we
Zone 1
Zone 1 Zone 2
Zone 2
L-band V4L-band V3
C-band V4C-band V3
0 10 20 30 40 50 60 70 80 90 100
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
minus30minus20minus10
01020
Fast
fadi
ng (d
B)
10 20 7040 50 80 10030 90600Height (m)
Height (m)
Figure 7 Fading behavior with respect to height
notice that the propagation channel at ultralow altitude iseasily affected by those obstacles on the ground The signalreceived is considered as a composition of a large numberof waves originated from the LoS path multipath scatteringand even diffractionsThis will challenge the communicationfor commercial UASs to carry out multiple missions in com-plex environments with strict regulations on flying distanceand height
In L-bandC-band the fading depths and fading periodsare different which indicates that the decay of multipath isalso related to the carrier frequency The modeling of thesmall-scale fading is introduced in the following section usingRice statistics tomodel Rician119870 factor with respect to height
33 Small-Scale Fading The Rician 119870 factor is an importantparameter to describe the signal behavior which has asignificant influence on the channel capacity It is a measureof the severity of fading where there is a LoS path from theTx to the Rx Generally the Rician 119870 factor is modeled eitheras a temporal variation on the fixed wireless links [20] or asdistance-dependent [21]
331 Estimation of Rician 119870 Factors Rician distribution isnormally used to describe the small-scale fading when thereis a dominant component such as a LoS path In our case theUAV is in LoS during the whole measurements and thus theRician119870 factor is suitable to evaluate the fading behavior Fig-ure 8 gives the probability density functions ofmeasurementsV4 and H2 for L-bandC-band using data normalized by a20-wavelength root mean square [21] which are well fitted inRician distributions119870 factor is estimated using themoment-method approach [22]
119870 =1003816100381610038161003816120585100381610038161003816100381621205902
100381610038161003816100381612058510038161003816100381610038162 = [1198661198862 minus 119866V2]12
1205902 = 119866119886 minus 100381610038161003816100381612058510038161003816100381610038162 (2)
6 Wireless Communications and Mobile Computing
H2 L-bandRician fitting
V4 L-bandRician fitting
H2 C-bandRician fitting
V4 C-bandRician fitting
0
01
02
03
04
05
06
07
08
09
0
02
04
06
08
1
12
0
01
02
03
04
05
06
07
08
0
01
02
03
04
05
06
07
08
09
10 05 215Envelope level
10 05 25215Envelope level
150 21 2505Envelope level
150 21 2505Envelope level
Figure 8 Probability density functions of the measurements
where119866119886 is the firstmoment of the power gain (119866) (which canbe calculated by finite data) and119866V is the secondmoment of119866about 119866119886 indicating the root mean square (RMS) fluctuationThe RMS is set at a length of 20 wavelengths 119870 factor iscalculated every 5m which contains around 60 samples inaverage and is considered large enough to obtain correctresults in our test environment [23]
332 Rician 119870 Factors Modeling In [24] the author pro-posed a Rician 119870 factor model for a UAV channel based onmeasurement at altitudes from 500 to 2000m The modelconsiders the 119870 factor as a linear function of distance andthe author states that the 119870 factor is nearly constant in hismeasurement
119870 (119877) = 1198700 + 119899119870 (119877 minus 119877min) + 119884 (3)
where 1198700 is a constant value for distance 119877min and 119884 is thezero-mean Gaussian random variable with standard devia-tion 120590119884 We fit the parameters of this model based on themeasurements at heights of 10m (H1) and 30m (H2) respec-tively for L-bandC-band The results are given in Table 3
Table 3 Fitting parameters of model in (3) based on horizontalmeasurements (119877min = 30m)
Band Height 119899119870 1198700 120590119884 Average Estimation
L-band 10m 00055 429 340 446 36030m 00082 728 413 750 725
C-band 10m 00805 352 288 580 30330m 00136 962 315 998 1142
The triangle dots in Figure 9 denote the statistic 119870 factors ofmeasurements H1 and H2 and the straight lines are fittingsof the model shown in (3) As observed the 119870 factor isalmost constant during the horizontal flights However thehorizontal119870 factor varies at different heightswith a differenceof 3ndash8 dB
According to the analysis of 119870 factor for different flyingtrajectories it is convincing that the fading behavior is morerelated to the flying height instead of the distance at ultralowaltitude When the altitude of UAV is very low the scatterersnear the ground give strong multipath fading to the channel
Wireless Communications and Mobile Computing 7
H1H2
Horizontal distance (m) C-band3020 60 70 90
H1H2
40 50 80minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
30 7050 8020 906040Horizontal distance (m) L-band
Figure 9 Rician 119870 factor with respect to the horizontal distance forL-bandC-band
When the UAV gets higher the effects of scatterers mitigateOnce the UAV reaches above BP the channel gets rid ofthe reflection from scatterers on the ground and hence thequality of the channel improves greatly and approaches thefree-space model Considering that the fading characteristicsrely on height instead of the elevation angle or the distancea height-dependent Rician 119870 factor model is proposed asfollows
119870 (119877) =
1198621 + 1198991ℎ + 1198841 ℎ lt BP1198622 + 1198992ℎ + 1198842 ℎ gt BP (4)
The parameters fitted are given in Table 4119870 factor in the last column of Table 3 is estimated using
the proposed model in (4) Comparing it to the average 119870factor calculated by horizontal measurements at 10m and
Table 4 Parameters of the proposed 119870 model at L-bandC-band
Band Height lt BP Height gt BP1198621 1198991 1205901198841 1198622 1198992 1205901198842
L-band 177 01829 265 952 00294 214C-band minus117 04195 368 1438 00345 293
30m heights we can observe that the estimation is goodenough and the error is very small
The distributions of 119870 factor are depicted in Figure 10which clearly shows high dependency on height It also showstwo tendencies in two zones and the BP estimated is around50m for L-band and 40m for C-band based on the leastsquare method This is due to the lower propagation lossesat lower frequencies which allows higher order reflections toaffect propagation
The cumulative probability distributions of the 119870 factorsof all measurements are illustrated in Figure 11 which clearlyreveals the effect of height and the difference of the twofrequency bands Generally the 119870 factor in the C-band ishigher than that in the L-band and is increasing before BPwhile after BP it tends to be constant
4 Validation of Measurements by Simulation
In this section a simulation was performed to explain theunderlying propagation mechanism of the ldquobreakpointrdquoyet more measurements under different scenarios are stillnecessary for further verification
Assuming there exists a reflection from the sidewall of theobstacle as depicted in Figure 12 we get a ldquoreversedrdquo two-raymodel where 119867119887 is the height of the obstacle and ℎ119903 is theheight of the reflection point During the ascent process ofUAV the reflection point is synchronously moving up untilthe UAV reaches a certain height after which the reflectionpoint disappears Such behavior can result in a decreaseof multipath components which meets our observations inmeasurements Assuming the distance from the Tx and theRx to the reflecting plane of the obstacle is 119889119905 and 119889119903respectively by ignoring the height of Rx which is muchlower than the obstacle ℎ119903 can be calculated as
ℎ119903 = 119889119903 sdot ℎ119889119903 + 119889119905 (5)
Modified from the flat earth two-ray (FE2R) model given in[25] the multiray model for 119873 paths is calculated as
119875119903 = 119875119905 ( 1205824120587)
1003816100381610038161003816100381610038161003816100381610038161003816radic119866LoS
119897LoS +119873
sum119894=1
119877119894radic119866NLoS119894119890minus119895Δ120601119894119897NLoS119894
10038161003816100381610038161003816100381610038161003816100381610038162
(6)
where 119875119905 is the transmitting power 119866LoS and 119866NLoS are thetotal antenna gain for LoS ray and for NLoS ray respectively119897LoS is the traveling distance of the LoS path and 119897NLoS is thetraveling distance of NLoS paths
8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Wireless Communications and Mobile Computing
H2 L-bandRician fitting
V4 L-bandRician fitting
H2 C-bandRician fitting
V4 C-bandRician fitting
0
01
02
03
04
05
06
07
08
09
0
02
04
06
08
1
12
0
01
02
03
04
05
06
07
08
0
01
02
03
04
05
06
07
08
09
10 05 215Envelope level
10 05 25215Envelope level
150 21 2505Envelope level
150 21 2505Envelope level
Figure 8 Probability density functions of the measurements
where119866119886 is the firstmoment of the power gain (119866) (which canbe calculated by finite data) and119866V is the secondmoment of119866about 119866119886 indicating the root mean square (RMS) fluctuationThe RMS is set at a length of 20 wavelengths 119870 factor iscalculated every 5m which contains around 60 samples inaverage and is considered large enough to obtain correctresults in our test environment [23]
332 Rician 119870 Factors Modeling In [24] the author pro-posed a Rician 119870 factor model for a UAV channel based onmeasurement at altitudes from 500 to 2000m The modelconsiders the 119870 factor as a linear function of distance andthe author states that the 119870 factor is nearly constant in hismeasurement
119870 (119877) = 1198700 + 119899119870 (119877 minus 119877min) + 119884 (3)
where 1198700 is a constant value for distance 119877min and 119884 is thezero-mean Gaussian random variable with standard devia-tion 120590119884 We fit the parameters of this model based on themeasurements at heights of 10m (H1) and 30m (H2) respec-tively for L-bandC-band The results are given in Table 3
Table 3 Fitting parameters of model in (3) based on horizontalmeasurements (119877min = 30m)
Band Height 119899119870 1198700 120590119884 Average Estimation
L-band 10m 00055 429 340 446 36030m 00082 728 413 750 725
C-band 10m 00805 352 288 580 30330m 00136 962 315 998 1142
The triangle dots in Figure 9 denote the statistic 119870 factors ofmeasurements H1 and H2 and the straight lines are fittingsof the model shown in (3) As observed the 119870 factor isalmost constant during the horizontal flights However thehorizontal119870 factor varies at different heightswith a differenceof 3ndash8 dB
According to the analysis of 119870 factor for different flyingtrajectories it is convincing that the fading behavior is morerelated to the flying height instead of the distance at ultralowaltitude When the altitude of UAV is very low the scatterersnear the ground give strong multipath fading to the channel
Wireless Communications and Mobile Computing 7
H1H2
Horizontal distance (m) C-band3020 60 70 90
H1H2
40 50 80minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
30 7050 8020 906040Horizontal distance (m) L-band
Figure 9 Rician 119870 factor with respect to the horizontal distance forL-bandC-band
When the UAV gets higher the effects of scatterers mitigateOnce the UAV reaches above BP the channel gets rid ofthe reflection from scatterers on the ground and hence thequality of the channel improves greatly and approaches thefree-space model Considering that the fading characteristicsrely on height instead of the elevation angle or the distancea height-dependent Rician 119870 factor model is proposed asfollows
119870 (119877) =
1198621 + 1198991ℎ + 1198841 ℎ lt BP1198622 + 1198992ℎ + 1198842 ℎ gt BP (4)
The parameters fitted are given in Table 4119870 factor in the last column of Table 3 is estimated using
the proposed model in (4) Comparing it to the average 119870factor calculated by horizontal measurements at 10m and
Table 4 Parameters of the proposed 119870 model at L-bandC-band
Band Height lt BP Height gt BP1198621 1198991 1205901198841 1198622 1198992 1205901198842
L-band 177 01829 265 952 00294 214C-band minus117 04195 368 1438 00345 293
30m heights we can observe that the estimation is goodenough and the error is very small
The distributions of 119870 factor are depicted in Figure 10which clearly shows high dependency on height It also showstwo tendencies in two zones and the BP estimated is around50m for L-band and 40m for C-band based on the leastsquare method This is due to the lower propagation lossesat lower frequencies which allows higher order reflections toaffect propagation
The cumulative probability distributions of the 119870 factorsof all measurements are illustrated in Figure 11 which clearlyreveals the effect of height and the difference of the twofrequency bands Generally the 119870 factor in the C-band ishigher than that in the L-band and is increasing before BPwhile after BP it tends to be constant
4 Validation of Measurements by Simulation
In this section a simulation was performed to explain theunderlying propagation mechanism of the ldquobreakpointrdquoyet more measurements under different scenarios are stillnecessary for further verification
Assuming there exists a reflection from the sidewall of theobstacle as depicted in Figure 12 we get a ldquoreversedrdquo two-raymodel where 119867119887 is the height of the obstacle and ℎ119903 is theheight of the reflection point During the ascent process ofUAV the reflection point is synchronously moving up untilthe UAV reaches a certain height after which the reflectionpoint disappears Such behavior can result in a decreaseof multipath components which meets our observations inmeasurements Assuming the distance from the Tx and theRx to the reflecting plane of the obstacle is 119889119905 and 119889119903respectively by ignoring the height of Rx which is muchlower than the obstacle ℎ119903 can be calculated as
ℎ119903 = 119889119903 sdot ℎ119889119903 + 119889119905 (5)
Modified from the flat earth two-ray (FE2R) model given in[25] the multiray model for 119873 paths is calculated as
119875119903 = 119875119905 ( 1205824120587)
1003816100381610038161003816100381610038161003816100381610038161003816radic119866LoS
119897LoS +119873
sum119894=1
119877119894radic119866NLoS119894119890minus119895Δ120601119894119897NLoS119894
10038161003816100381610038161003816100381610038161003816100381610038162
(6)
where 119875119905 is the transmitting power 119866LoS and 119866NLoS are thetotal antenna gain for LoS ray and for NLoS ray respectively119897LoS is the traveling distance of the LoS path and 119897NLoS is thetraveling distance of NLoS paths
8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Wireless Communications and Mobile Computing 7
H1H2
Horizontal distance (m) C-band3020 60 70 90
H1H2
40 50 80minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
30 7050 8020 906040Horizontal distance (m) L-band
Figure 9 Rician 119870 factor with respect to the horizontal distance forL-bandC-band
When the UAV gets higher the effects of scatterers mitigateOnce the UAV reaches above BP the channel gets rid ofthe reflection from scatterers on the ground and hence thequality of the channel improves greatly and approaches thefree-space model Considering that the fading characteristicsrely on height instead of the elevation angle or the distancea height-dependent Rician 119870 factor model is proposed asfollows
119870 (119877) =
1198621 + 1198991ℎ + 1198841 ℎ lt BP1198622 + 1198992ℎ + 1198842 ℎ gt BP (4)
The parameters fitted are given in Table 4119870 factor in the last column of Table 3 is estimated using
the proposed model in (4) Comparing it to the average 119870factor calculated by horizontal measurements at 10m and
Table 4 Parameters of the proposed 119870 model at L-bandC-band
Band Height lt BP Height gt BP1198621 1198991 1205901198841 1198622 1198992 1205901198842
L-band 177 01829 265 952 00294 214C-band minus117 04195 368 1438 00345 293
30m heights we can observe that the estimation is goodenough and the error is very small
The distributions of 119870 factor are depicted in Figure 10which clearly shows high dependency on height It also showstwo tendencies in two zones and the BP estimated is around50m for L-band and 40m for C-band based on the leastsquare method This is due to the lower propagation lossesat lower frequencies which allows higher order reflections toaffect propagation
The cumulative probability distributions of the 119870 factorsof all measurements are illustrated in Figure 11 which clearlyreveals the effect of height and the difference of the twofrequency bands Generally the 119870 factor in the C-band ishigher than that in the L-band and is increasing before BPwhile after BP it tends to be constant
4 Validation of Measurements by Simulation
In this section a simulation was performed to explain theunderlying propagation mechanism of the ldquobreakpointrdquoyet more measurements under different scenarios are stillnecessary for further verification
Assuming there exists a reflection from the sidewall of theobstacle as depicted in Figure 12 we get a ldquoreversedrdquo two-raymodel where 119867119887 is the height of the obstacle and ℎ119903 is theheight of the reflection point During the ascent process ofUAV the reflection point is synchronously moving up untilthe UAV reaches a certain height after which the reflectionpoint disappears Such behavior can result in a decreaseof multipath components which meets our observations inmeasurements Assuming the distance from the Tx and theRx to the reflecting plane of the obstacle is 119889119905 and 119889119903respectively by ignoring the height of Rx which is muchlower than the obstacle ℎ119903 can be calculated as
ℎ119903 = 119889119903 sdot ℎ119889119903 + 119889119905 (5)
Modified from the flat earth two-ray (FE2R) model given in[25] the multiray model for 119873 paths is calculated as
119875119903 = 119875119905 ( 1205824120587)
1003816100381610038161003816100381610038161003816100381610038161003816radic119866LoS
119897LoS +119873
sum119894=1
119877119894radic119866NLoS119894119890minus119895Δ120601119894119897NLoS119894
10038161003816100381610038161003816100381610038161003816100381610038162
(6)
where 119875119905 is the transmitting power 119866LoS and 119866NLoS are thetotal antenna gain for LoS ray and for NLoS ray respectively119897LoS is the traveling distance of the LoS path and 119897NLoS is thetraveling distance of NLoS paths
8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Wireless Communications and Mobile Computing
V1V2
V3V4
V1V2
V3V4
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
minus5
0
5
10
15
20
25
K fa
ctor
(dB)
10 20 7040 50 60 80 9030 1000Height (m) C-band
10 20 30 40 50 60 70 80 90 1000Height (m) L-band
Figure 10 Rician119870 factor with respect to the heights for L-bandC-band Lines refer to the piecewise linear fitting of K factor
In (6) 119877119894 is the reflecting coefficient for 119894 path whichdepends on the impinging angle and dielectric constant 120576119903
119877 = sin120601 minus 119885sin120601 + 119885 (7)
where 119885 is written as
119885 =
radic120576119903 minus cos2120579120576119903 for vertical polarization
radic120576119903 minus cos2120579 for horizontal polarization(8)
The simulation results were computed based on the FE2Rmodel and multiray model given in (6)
Considering the fact that there are many obstacles inour measurement environment the power we received can
h lt BPh gt BP
L-band
C-band
0
01
02
03
04
05
06
07
08
09
1
Cum
ulat
ive p
roba
bilit
y
205 150 10K factor (dB)
Figure 11 The distribution of Rician 119870 factor for L-bandC-band
be regarded as a composition of multiple propagation raysincluding the LoS component the components caused byground reflection and the reflections from obstacles as wellas the scattering and diffractions Thus four major obstaclesconsidered to contribute the most to the power received asillustrated in Figure 13 are included in the simulation
The major problem for the simulation is that it is difficultto find the exact reflecting point of different objects especiallyfor the containers since there were many containers and theywere moving during the days when the measurements wereconducted It is noticed that in the simulation the distancebetween the reflecting surface and the TxRx as well asthe incident angle has a significant impact on the decayingbehavior of received power as depicted in themultiraymodelwhile the reflection coefficient determines the fading depth ofthe interference
The dielectric constants of the buildings are set accordingto [26 27] The coefficient 120576119903 of the cement concrete whichis the main material of buildings can vary from 4 to 28Considering the aging process of buildings and the influenceof frequency on the dielectric constant 120576119903 of building 1 build-ing 2 and building 3 are all set to 7 Normally the dielectricconstant 120576119903 of the grassland depends on the actual watercontent and the thickness of the grass In our environmentthe ground is a dry grassland which cannot serve as an idealreflection surface therefore the value of 120576119903 for the groundreflection is set to 5 in our case
As observed from the graph in Figure 6 the maximumfading depth reaches 40 dB which is the result of a veryhigh reflection coefficient Our study shows that only if thedielectric constant 120576119903 is set to more than 10000 can the fadingdepth reach 40 dB However the ground and the buildingsin the environment cannot provide such a high reflectioncoefficient and thus it is postulated that such a phenomenonwas caused by the reflection from the metal containersnearby Since the dielectric constant of the ideal conductoris close to infinity the coefficient 120576119903 of the containers whichare made of steel can be very high
Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Wireless Communications and Mobile Computing 9
Tx radiation pattern
Rx radiation pattern
h
h height of UAV
d1
d2
l I3
Hb
Hb hCABN I <OCF>CHA
hr
hr height of reflection point
Figure 12 Sketch of the reflection from the sidewall
Rx
Tx
(1)
(2)(3)
(4)
(5)
(6)
Containers
Building 1
Building 2
Building 3
(1) LoS(2) Ground reflection(3) Reflection from containers(4) Reflection from Building 1(5) Reflection from Building 2(6) Reflection from Building 3
Figure 13 Sketch of the simulated environment
In the simulation we only take into account the LoS andthe single-bounce reflections The simulated environment isin accordance with the test environment shown in Figure 2The heights are given in Table 6 and the dielectric constantsare listed in Table 5 The antennas used in the simulationare omnidirectional and vertically polarized in the elevationplane
Assuming that the reflections from the obstacles grad-ually decrease when the UAV ascends then the disappear-ing heights for reflections from containers and building 1building 2 and building 3 are 30m 40m 50m and 60mrespectively
The simulation results for L-bandC-band are depicted inFigure 14 The red dash-dotted line represents the receivedpower generated from typical flat earth 2-ray (FE2R) modelwhile the blue solid line gives the result of superpositionof the LoS path the ground reflection and the single-bounce reflections from containers building 1 building 2
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
Case 1 with ground reflectionCase 2 without ground reflectionCase 3 FE2R model
minus75
minus70
minus65
minus60
minus55
minus50
minus45Re
ceiv
ed p
ower
(dBm
)
minus90
minus80
minus70
minus60
minus50
Rece
ived
pow
er (d
Bm)
0 12020 10040 60 80Height (m) C-band
0 12020 10040 60 80Height (m) L-band
Figure 14 Simulation results for L-bandC-band
and building 3 respectively Note that the black curve isgenerated under the condition basically the same as case 3only without the ground reflection
We can observe from Figure 14 a similar pattern of powervariation to the empirical results depicted in Figure 6 In the
10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Wireless Communications and Mobile Computing
Table 5 The configurations of the simulation
Coefficient 120576119903Antennas
Ground (dry grass) Containers (steel)Buildings 1 2 and
3(cement bricks)
5 10000 7 Omnidirectional vertically polarized inelevation
Table 6 The relative height of the objects neighborhood
Building 1 Building 2 Building 3 Containers14m 13m 30m 9m
simulation the received power at first consists of the LoS andthe reflections from containers building 1 building 2 andbuilding 3 When the UAV is above the disappearing altitudeof container reflection the received power contains onlythe LoS and the reflections from buildings With furtherincreasing of UAV height less and less reflection remainsuntil finally the LoS is the only path existing
This simulation only considers an ideal simplified sce-nario with objects with smooth surfaces Multiple-bouncereflections as well as diffractions are not taken into considera-tion and therefore there are some inconsistencies between thesimulation results and measurements However the overalltendencies of our simulation results show a high similarity tothe empirical measurement results it can be observed thattwo propagation zones with different fading characteristicsexist at both simulations and measurements Neverthelessmore measurements are necessary to investigate the detailsof the mechanism leading to the ldquobreakpointrdquo effect observedhere
5 Conclusions
In this paper a measurement campaign dedicated to charac-terizing AG channels has been introduced We have noticedthat the complex scatterers near the ground play an importantrole in the characterization of the propagation channel Mul-tiple measurements on different positions were conductedand the analysis of the measurements indicates that thechannel shows an obvious dependency on the height insteadof the elevation angle or the distance Path loss has beenmodeled and small-scale fading has been investigated Thepath loss exponents reveal the channelrsquos dependency onheight which is previously seldom investigated The fadingbehavior is distinguished obviously in different ranges ofheights and thus a height-dependent Rician 119870 factor modelis proposed which will be useful in the modeling of UAVchannels and the performance analysis of the UAS wirelesscommunication systems such as the channel capacity and thethroughput
An interesting change of the propagation channel afterthe so-called ldquobreakpointrdquo was observed and a geometry-based simulation was performed However more measure-ments under different scenarios are necessary to accurately
investigate the underlying mechanism of the ldquobreakpointrdquowhich is considered to be useful for guiding the UAVs to findthe best communication altitude to avoid deep fading whenflying over a given environment
Disclosure
This work was done when Z Qiu and X Chu were visitingUPM as part of the Double Master Degree Program betweenTongji University and the Technical University of Madridsupported by the China Scholarship Council (CSC)
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was developed under the framework of ENA-BLING 5G TEC2014-55735-C3-2-R funded by the SpanishMinistry of Economy and Competitiveness and was jointlysupported by the Key Project ldquo5G Ka frequency bands andhigher and lower frequency band cooperative trail systemresearch and developmentrdquo under Grant 2016ZX03001015 ofChinaMinistry of Industry and Information Technology andthe National Natural Science Foundation of China generalproject under Grant 61471268
References
[1] M Bedford and A Hanscom ldquoUnmanned aircraft system(UAS) service demand 2015-2035 literature review projectionsof future usagerdquo Tech Rep US Department of TransportationTechnical 2013
[2] Federal Aviation Administration (FAA) ldquoFAA Modernizationand Reform Act of 2012 (FMRA)rdquo pub L No 112-95 331 126Stat 1172 (2012) 334(c) (2) (C)
[3] European Aviation Safety Agency ldquoCivil drones (Unmannedaircrafts)rdquo httpswwweasaeuropaeueasa-and-youcivil-drones-rpas
[4] ldquoCharacteristics of unmanned aircraft systems and spectrumrequirements to support their safe operation in non-segregatedairspace ITU-Rrdquo ITU-R Report ITU-R M2171 2009 httpswwwituintenITU-RspacesnlDocumentsR-REP-M2171-2009-PDF-Epdf
[5] J D Parsons The Mobile Radio Propagation Channel JohnWiley amp Sons New York NY USA 2000
[6] D W Matolak and R Sun ldquoAir-ground channel measurementsamp modeling for UASrdquo in Proceedings of the 2013 13th Annual
Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Wireless Communications and Mobile Computing 11
Integrated Communications Navigation and Surveillance Con-ference ICNS 2013 USA April 2013
[7] FOnoK TakizawaH Tsuji andRMiura ldquoS-band radio prop-agation characteristics in urban environment for unmannedaircraft systemsrdquo in Proceedings of the International Symposiumon Antennas and Propagation ISAP 2015 November 2015
[8] M Simunek F P Fontan andP Pechac ldquoTheUAV low elevationpropagation channel in urban areas Statistical analysis andtime-series generatorrdquo IEEE Transactions on Antennas andPropagation vol 61 no 7 pp 3850ndash3858 2013
[9] T J Willink C C Squires G W Colman and M T Muc-cio ldquoMeasurement and characterization of low-altitude air-to-ground MIMO channelsrdquo IEEE Transactions on VehicularTechnology vol 65 no 4 pp 2637ndash2648 2016
[10] A Kezuka S Saito T Yoshihara and S Saitoh ldquoEffect ofbuilding on VHF propagation above airport surfacerdquo in Pro-ceedings of the 21st International Symposium on Antennas andPropagation ISAP 2016 pp 216-217 October 2016
[11] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Com-munications Conference GLOBECOM 2014 pp 2898ndash2904December 2014
[12] E Yanmaz R Kuschnig and C Bettstetter ldquoChannel measure-ments over 80211a-based UAV-to-ground linksrdquo in Proceed-ings of the 2011 IEEE GLOBECOM Workshops pp 1280ndash1284December 2011
[13] N Goddemeier K Daniel and C Wietfeld ldquoRole-based con-nectivity management with realistic air-to-ground channelsfor cooperative UAVsrdquo IEEE Journal on Selected Areas inCommunications vol 30 no 5 pp 951ndash963 2012
[14] W Newhall R Mostafa C Dietrich et al ldquoWideband air-to-ground radio channel measurements using an antenna array at2 GHz for low-alititude operationsrdquo in Proceedings of the IEEEMilitary Communications Conference 2003 MILCOM 2003pp 1422ndash1427 Boston MA USA
[15] Q Feng J McGeehan E K Tameh and A R Nix ldquoPathloss models for air-to-ground radio channels in urban environ-mentsrdquo in Proceedings of the 2006 IEEE 63rd Vehicular Technol-ogyConference VTC 2006-Spring pp 2901ndash2905 Australia July2006
[16] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 USA December 2016
[17] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[18] R He Z Zhong B Ai and J Ding ldquoAn empirical pathloss model and fading analysis for high-speed railway viaductscenariosrdquo IEEE Antennas andWireless Propagation Letters vol10 pp 808ndash812 2011
[19] D W Matolak and R Sun ldquoAirndashGround Channel Characteri-zation for Unmanned Aircraft SystemsmdashPart IIIThe Suburbanand Near-Urban Environmentsrdquo IEEE Transactions on Vehicu-lar Technology vol 66 no 8 pp 6607ndash6618 2017
[20] L J Greenstein S S Ghassemzadeh V Erceg and D GMichelson ldquoRicean k-factors in narrow-band fixed wirelesschannels theory experiments and statistical modelsrdquo IEEETransactions on Vehicular Technology vol 58 no 8 pp 4000ndash4012 2009
[21] R He Z Zhong B Ai and J Ding ldquoDistance-dependentmodel of ricean k-factors in high-speed rail viaduct channelrdquoinProceedings of the 76th IEEEVehicular Technology ConferenceVTC Fall 2012 Canada September 2012
[22] L J Greenstein D G Michelson and V Erceg ldquoMoment-method estimation of the Ricean K-factorrdquo IEEE Communica-tions Letters vol 3 no 6 pp 175-176 1999
[23] W C Y Lee ldquoEstimate of local average power of a mobile radiosignalrdquo IEEE Transactions on Vehicular Technology vol 34 no1 pp 22ndash27 1985
[24] D W Matolak and R Sun ldquoAir-Ground Channel Charac-terization for Unmanned Aircraft Systems-Part I MethodsMeasurements and Models for Over-Water Settingsrdquo IEEETransactions on Vehicular Technology vol 66 no 1 pp 26ndash442017
[25] A GoldsmithWireless Communications CambridgeUniversityPress New York NY USA 1st edition 2005
[26] A Martinez A P Byrnes et al Modeling dielectric-constantvalues of geologic materials an aid to ground-penetrating radardata collection and interpretation Kansas Geological SurveyLawrence Kansas Kan USA 2001
[27] L Shi Q Xu B Chen and C Gao ldquoMeasurement of thefrequency-dependent dielectric constant of concrete materialsby TDR and wavelet modeling methodrdquo in Proceedings of the3rd Asia-Pacific Conference on Environmental ElectromagneticsCEEM 2003 pp 626ndash629 November 2003
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal of
Volume 201
Submit your manuscripts athttpswwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of