Embed Size (px)
Citation preview

222
Smart Granular Materials
Prototypes for Hygroscopically Actuated Shape-Changing Particles
1
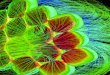
1 A hygroscopically actuated particle can reversibly alter its geometry from a convex stick at high wood moisture content (WMC) (left image, bottom particle) to a double non-convex hook at low WMC (left image, top particle), forming a highly entangled granular material (right image).
ABSTRACTHygroscopically Actuated Granular Materials are a new class of designed granular materials in archi-tecture. Granular materials are large numbers of particles that are only in loose contact with each other. If the individual particle in such a granular material is defined in its geometry and material make-up, one can speak of a designed granular material. In recent years these designed granular materials have been explored as architectural construction systems. Since the particles are not bound to each other, granular materials are rapidly reconfigurable and recyclable. Yet one of the biggest assets of designed granular materials is the fact that their overall behavior can be designed by altering the geometry or material make-up of the individual composing particles. Up until now mainly non-actuated granular materials have been investigated. These are designed granular mate-rials in which the geometry of the particle stays the same over time. The proposed Hygroscopically Actuated Granular Materials are systems consisting of time-variable particle geometries. Their potential lies in the fact that one and the same granular system can be designed to display different mechanical behaviors over the course of time.
The research presented here encompasses three case studies, which complement each other both with regard to the development of the particle system and the applied construction processes. All three cases are described both with regard to the methods used and the eventual outcome aiming at a potential design system for Hygroscopically Actuated Granular Materials. To conclude, these results are compared and directions of further research are indicated.
KarolaDierichs*DylanWood*David CorreaAchim MengesInstitute for Computational Design and Construction, University of Stuttgart

223ACADIA 2017 | DISCIPLINES + DISRUPTION
2 Non-actuated, six-armed particles (top) can form macro-scale architectural structures (bottom).
AIMHygroscopically Actuated Granular Materials are an entirely novel class of designed granular materials in architecture (Figure 1). The aim of the paper is to present three initial case studies in order to develop potential directions of further research in the field.
Granular materials are defined as extremely large numbers of particles that are not bound by a matrix. That means that only short-range, repulsive contact forces are acting between these particles (de Gennes 1999; Jaeger, Nagel, and Behringer 1996). In nature these granular materials occur in the form of sand or snow (de Gennes 1999; Jaeger, Nagel, and Behringer 1996). If the geometry and the material of the composing particles are defined by a designer, one can speak of a designed granular material (Jaeger 2015). In architecture these designed granular materials are an emerging area of research (Keller and Jaeger 2016; Dierichs and Menges 2016) (Figure 2). The field is closely interrelated to developments in granular physics (Jaeger 2015). Designed granular materials are embedded in the transdisci-plinary area of designer matter (Reis, Jaeger, and van Hecke 2015).
A Hygroscopically Actuated Granular Material is a designed granular material in which the particles can change from one geometry to another over time (Dierichs and Menges 2016; Dierichs and Menges 2015) (Figure 1). This geometric change in shape is enabled through the use of a bilayer wood element, which responds to variations in wood moisture content (WMC) with changes in curvature. Further design on the layups of the wood bilayer can be used to tailor the direction, angle, speed, and radius of curvature in relation to climatic conditions.
The three case studies conducted so far explore different aspects of Hygroscopically Actuated Granular Materials, and in doing so complement each other with regard to the research questions proposed. Case study 1 proposes a basic particle geometry that allows the particle to change from a convex to a double-non-convex, hook-shaped geometry. It also investigates controlled patterns of laying the particles out in order to affect the behavior of the granular material during actuation. Case study 2 aims to develop a system that is composed of low-cost recycled bulk material that is combined with high-cost, custom-made actuated particles. Here, the particles are distributed in an unordered manner. Case study 3 investigates the scaling up of the system developed in case study 1, the integration of macro-scale robotic construction processes, and the development of suitable simula-tion models for the shape change of the actuated particles.

224
RELEVANCEDespite rarely being investigated as an architectural construction system, Hygroscopically Actuated Granular Materials are a highly relevant field of research. One can distinguish two levels on which these material systems can be considered one of the most pertinent areas of research into designer matter at this point in time.
First LevelHygroscopically Actuated Granular Materials in particular are significant since they allow for variation in the characteristics of a designed granular material over the course of time. This can, for example, imply that a granular material is loose and pourable in one state and highly entangled in another, depending on the ambient humidity conditions. This property of a time-variable geometry for the individual particles allows for the to deploy-ment of the most suitable characteristics for each respective granular material for individual construction phases (Dierichs and Menges 2016).
Second Level The relevance of granular materials for architectural construction on a second and more generic level is twofold. On the one hand granular materials are fully recyclable and thus infinitely reus-able, due to the fact that the individual particles are not bound to each other (Keller and Jaeger 2016; Aejmelaeus-Lindström et al. 2016; Dierichs and Menges 2016; Dierichs and Menges 2012). On the other hand granular materials are reconfigurable. Whereas recycling denotes the reuse of an entire structure, reconfiguring is understood as the modification of parts of a structure, for example, in order to change densities to modulate light transmission (Keller and Jaeger 2016; Aejmelaeus-Lindström et al. 2016; Dierichs and Menges 2016; Dierichs and Menges 2012).
CURRENT STATEThe following sections will give a concise overview of the current state of the field of designed granular materials research in architecture and physics. Research into hygroscopically actuated wood bilayers will also be introduced. In conclusion, the novelty of the proposed research field of Hygroscopically Actuated Granular Materials will be highlighted.
Designed Granular MaterialsOne of the first projects using designed granular materials in architecture has been conducted by Kentaro Tsubaki at the Cranbrook Academy of Art (Tsubaki 2012). Other very early investigations have been undertaken by Eiichi Matsuda at the Architectural Association, as well as Cathlyn Newell and Anne Hawkins at Rice University (Hensel and Menges 2006b; Hensel
and Menges 2006a). These intial studies mainly investigate highly non-convex particles that do not change shape. Between 2010 and 2016 research into designed granular materials has been conducted at the Institute for Computational Design and Construction (ICD), University of Stuttgart, establishing a design system for both the particle systems themselves and related relevant construction systems (Dierichs and Menges 2016). Hygroscopically actuated particles have been proposed as part of this design system, but have only been investigated on a prin-ciple level as experiments with relatively small particle numbers.
Designed granular materials are also an emerging research area in soft matter physics (Jaeger 2015). Both highly non-convex and double-non-convex granular materials have been investigated (Murphy et al. 2016; Athanassiadis et al. 2014; Franklin 2014; Gravish et al. 2012; Ludewig and Vandewalle 2012; Meng et al. 2012; Malinouskaya et al. 2009).
Hygroscopically Actuated Wood BilayersClimate responsive shape-changing materials are of great interest in architecture and construction for their ability to achieve specific physical functions without the complications of electromechanical systems (Sung 2016; Correa et al. 2015; Reichert, Menges, and Correa 2014). At a macro-scale, wood bilayers have been used to produce hygroscopically actuated parts in the range of 1 to 10 cm (Rüggeberg and Burgert 2015) Further, cellulose-based additive manufacturing has been used to produce bilayers in the range 1 m (Duro-Royo, Mogas-Soldevila, and Oxman 2015; Mogas-Soldevila et al.2015). In this study the focus is on hygroscopically actuated wood bilayers. Recently wood bilayers have been studied for use as humidity-respon-sive actuators and building facades that curve in response to specific changes in relative humidity (Menges and Reichert 2015; Holstov, Bridgens, and Farmer 2015). The bilayer effects can be used to manufacture at scales from 1 cm to 1 m with designed curvatures by arranging the fiber orientations within the bilayer layout and layup (Wood et al. 2016).
Result of the Current StateIn conclusion, a range of different particle geometries and related behaviors of the overall granular material have been investigated. Yet these geometries are static and cannot change from one shape to the other over time. However, enabling the particles to shape-change over time allows for the design of granular materials that can be tailored for different building phases, e.g., moving from a pourable to a solidly entangled granular material.
Hygroscopically Actuated Granular Materials as architectural construction systems have been proposed as a category of designed granular materials in architecture (Dierichs and Menges
Smart Granular Materials Dierichs, Wood, Correa, Menges

225ACADIA 2017 | DISCIPLINES + DISRUPTION
2016). However, a case-study-based exploration of this research area has not been conducted so far. In this context the article presents three macro-scale architectural explorations of this novel branch of designed granular materials.
METHODSBoth experiments and simulations have been used in order to investigate Hygroscopically Actuated Granular Materials. The precise experimental and simulative setup will be described directly in the context of each individual case study. In this section only the basic experimental principles and mathematical models for simulation are outlined.
ExperimentsExperiments are based on the lamination of the actuated materials and the fabrication of the particles. The particles are observed either under controlled laboratory conditions or in an uncontrolled, yet documented field condition. Wood bilayer sheets are produced by equalizing, wetting, or drying wood boards and veneers to a specific WMC before laminating them to a layer with perpendicular fiber orientation. When the oppo-site WMC is obtained the bilayers are actuated and curve. The actuation process is reversible. The bilayer sheets were later cut into actuating elements that form the particle.
Simulations and Design ModelingThe design of the movement patterns in individual particles
3 Instances of a hygroscopically actuated particle during one cycle from low to high relative humidity and back.
and the underlying design of the actuated bilayer materials was modeled using three complimentary models to expand the particle design space. Single curvature in wood bilayers can be analytically estimated using an adapted version of the Timoshenko beam theory (Rüggeberg and Burgert 2015; Timoshenko 1925). For initial design and exploration, a voxel-based model was developed in a parametric modeling environment with custom shape-matching goals, utilizing the Kangaroo 2 library. A second more refined and material-specific bilayer model was developed using a commercial FEM library and interface. In both models the design of the layouts is set in the parametric modeling interface and the information is converted to each model format. Bilayers and individual particles were then manufactured and tested in controlled conditions to verify their movements.
CASE STUDIESInitially the three case studies are presented with respect to their overall aim and relevance, their specific methods, and the results achieved. Consequently these combined results are evaluated and discussed as an interrelated body of work.
Case Study 1Case study 1 was conducted as a master's thesis in Integrative Technologies and Architectural Design Research (ITECH) by Matthias Helmreich (2015) at the University of Stuttgart in 2015. The project aims to investigate the behavior of homogenous
3

226
4
granular materials consisting of hygroscopically actuating particles (Figure 3). The core focus, on the one hand, is the volume inflation of the granular materials as particle geometries transition from flat-packed sticks to loose-packed three-dimensional hooks. On the other hand, specific layout patterns are investigated in order to control the overall geometry of the granular structure after actuation.
The particles are made from a wood bilayer. The active layer was custom flat-sawn from solid beech wood to a 4.0 mm thickness. Industrially produced spruce veneer, longitudinally cut at a thick-ness of 0.9 mm was used as the restrictive layer in the eventual bilayer material.
Each particle is composed of four bilayer strips, which are fastened at their midpoint. The particles have two main states: curled and uncurled. In the uncurled state of the composing strips, the particles have a convex geometry with a high aspect ratio, i.e., a stick. In the curled state, the particles have double-non-convex, hook-shaped geometry. On the one hand this specific geometric change from a stick to a three-dimensional hook was developed with regard to the packing volume versus the deployed volume. On the other hand it affects the ability of the granular material to be poured or to entangle. Both these aspects will be discussed in the results.
Layout configurations of the particles were developed to inves-tigate the effect of unit-to-unit interaction in lattices of 50–100 particle units. Given the change in geometry from linear stick to hook-like curl, tests were conducted to analyze the level of interaction and global behavior resulting from different levels of parallel overlap (Figure 4).
Testing of the hygroscopically actuated system was done in a humidity controlled chamber and under external weather condi-tions. Actuation of the particles was observed and documented
in both. As a result, case study 1 is based on a particle geometry that allows the particle to change shape from a convex stick to a double-non-convex three-dimensional hook depending on the relative humidity of the environment. The material is a beech and spruce bilayer. The particles are not mixed. The construction was conducted in a controlled-humidity chamber, where the particles are laid out manually in ordered patterns.
On a practical level of design, one can observe three key aspects. First, the hygroscopically actuated granular material increases in volume multiple times during actuation. Second, the granular material can be loosely poured when the particles are convex, whereas it is highly entangled when the particles are double-non-convex. Third, the layout patterns of the particles allow for greater control over the behavior of the overall structure. Several spatial geometries, such as straight wall, curved wall, arch, and dome have been explored using these observations.
On a methodological level, the case study relied solely on phys-ical experiments; no simulations of the individual particle or the overall granular material were conducted. This method proved valuable, especially since the research area is in its very early stages and suitable parameters for simulation can be established through a rapidly conducted series of physical experiments.
On a conceptual level, case study 1 lays emphasis on controlling the behavior of the granular material through layout patterns of the individual particles. In the wider context of architectural design, however, the investigation of unordered pouring of the particles, as well as of subsequent cycles of actuation, can lead to the observation of unexpected behavior. This research track could open a wider discourse on the role of controlled processes in architectural design.
Smart Granular Materials Dierichs, Wood, Correa, Menges
5

227ACADIA 2017 | DISCIPLINES + DISRUPTION
4 Particles are laid out parallel to each other in a quarter-circular plan. During actuation they rise vertically into an entangled, solid wall.
5 Particle mixes can be made by combining particles consisting of wood bilayer material actuating under low WMC and non-actuated particles made from scrap wood.
6 A beam spans 1.07 m, where the hygroscopically actuated particles have been distributed in zones with tensile forces and the majority of non-actuated particles in zones with compressive forces (bottom). The structure can resolve within 30 minutes once the WMC of the particles rises (top).
Case Study 2Case study 2 was carried out as a master's thesis in ITECH by Alexander Wolkow (2016) at the University of Stuttgart.
Departing from the observation that manufacturing hygro-scopically actuating particles is costly, case study 2 proposes a designed granular material that combines two particle types: a small percentage of hygroscopically actuating particles with a large percentage of cheap ones, and recycled, non-actuating bulk materials. The hygroscopically actuating materials introduce zones with tensile strength in otherwise compression-only mate-rials (Figure 5).
A fast-reacting and high-curvature actuated bilayer material was produced using 1.5 mm thick peeled beech veneer, combined with a restrictive layer of 0.6 m thick quarter-cut maple veneer. The active layers were sprayed to achieve a high WMC before vacuum lamination using PUR adhesive. For the first particle type, sticks measuring 200 x 5 x 5 mm were cut from scrap wood using a table saw. For the second particle type, twisting actuating particles were created by cutting the standard bilayer sheets into 10 x 300 mm strips at a 30 degree angle to the edge of the sheet. The geometry of the non-actuated particles, i.e., the sticks, was based on fabrication processes as well as the ability of the granular material to interlock under compression. For the latter, the aspect ratio of the sticks was based on findings drawn from granular physics (Franklin 2012; Trepanier and Franklin 2010; Blouwolff and Fraden 2006; Philipse 1996). The geometry of the actuated particles was developed in empirical studies testing a range of curled particle variants.
As opposed to the layout patterns in case study 1, case study 2 uses randomly poured particles. The distribution is only controlled in terms of its volume percentage and mixing. The particles were distributed manually. Parallel investigations were made using a funnel to pour the particles in a directed manner.
The actuated particles were laminated under wet conditions, and the actuation took place under non-controlled humidity on site. The relative humidity during actuation was measured using a hygrometer.
In summary, case study 2 uses two types of particles: non-ac-tuated sticks and actuated ones, which can turn from sticks to spirals. The non-actuated particles are made from scrap wood, while the actuated ones consist of a beech maple bilayer wood. Construction was conducted in ambient humidity. Particles were distributed manually in an unordered manner.
On a practical level of design, case study 2 explores particle geometries of both actuated and non-actuated particles, as well as mix ratios. A beam measuring 1.07 m in length, 0.3 m in depth, and 0.5 m in height, as well as a square slab measuring 1.07 x 1.07 x 0.05 m have been successfully tested with this type of Hygroscopically Actuated Granular Material (Figure 6).
On a methodological level, case study 2 relies solely on working with ambient humidity. As a method this is relevant, as it brings the process closer to actual construction processes on site. Again, only experiments and no simulations are used for this investigation, which is suitable for this early-stage research. On a
6

228 Smart Granular Materials Dierichs, Wood, Correa, Menges
conceptual level case study 2 introduces unordered processes of distribution, relying on mix percentages rather than the precise placement of the particles. The process of design is moved from an exact placing of elements to percentage distribution, from control of the overall form to the observation of the material behavior. Again, as in case study 1, these structures are not observed in iterative cycles of alternating humidity.
CaseStudy3Case study 3 was conducted as a workshop project by the ICD, University of Stuttgart, at the Domaine de Boisbuchet in Lessac, France in 2016.
Case study 3 directly builds on case study 1 by exploring fabrica-tion processes for the wood bilayer material, which is suitable for mass production. In addition, it introduces macro-scale robotic fabrication into the assembly process.
A trilayer laminate was manufactured using two active layers of flat-sawn 2.5 mm thick beech wood veneer, cut in sheets with 90 degree and 45 degree fiber orientation in relation to the overall sheet. These were sprayed to reach a high WMC and laminated with a 0.6 mm thick flat-sawn maple veneer with 0 degree fiber orientation with respect to the element.
Particles were made from four strips, in the same fashion as in case study 1, with only the addition of a central stick, which is non-actuating (Figure 1). The particles measured about 450 mm
in length in the wet state. Prior to the final lamination, variations in bilayer layouts were explored (Figure 7). Differences in length occurred since beech was sourced from different regions within one tree. About 2000 particles were made in total. The addi-tional stick inside the particle was introduced in order to increase the final deployed volume, as well as to potentially increase the stiffness of the overall granular material.
Distribution of the particles was conducted by a cable robot with a custom-made gripper. Controlled three-dimensional layout patterns were used. As in case study 1, parallel, square, and trian-gular layout patterns were explored. The final structures were constructed with a layout pattern that uses overlapping squares (Figure 8).
The particles are fabricated to actuate from high to low WMC. They were laminated under controlled conditions, but deployed under non-controlled ambient humidity conditions on site. The relevant data, e.g., the relative humidity and temperature, were gathered using a hygrometer and a thermometer, which were tethered to registering software.
In conclusion, case study 3 uses actuated particles that are made of wood bilayer strips, which are fastened on a non-actuated core stick. They can change shape from convex sticks to double-non-convex three-dimensional hooks. A cable-driven parallel robot with a custom effector is used to lay out the particles in specific patterns. Actuation occurs under ambient humidity and is observed in cycles over two weeks.
On a practical level of design, case study 3 takes the fabrica-tion of the particles into mass production, using pre-cut veneer. Challenges here are the naturally occurring variations in grain orientation, which affect the individual particle geometry. In a same line of research, the use of a cable-driven parallel robot successfully explores a macro-scale in situ construction process for the distribution of the particles.
On a methodological level, case study 3 introduces simulation as a means of investigating shape-changing particle geometry. This is a pertinent further development from case studies 1 and 2 and it is aimed at opening up the realm of predictive modeling.
On a conceptual level of design, case study 3 introduces the observation of iterative cycles of actuation under ambient humidity. The design process is moved from achieving a final and static end state to a continuously forming and reforming system.
7
7 Digital design and simulation of particle movements based on variations in bilayer layouts (A1-3) and combination of multiple bilayer strips (B).

229ACADIA 2017 | DISCIPLINES + DISRUPTION
DISCUSSIONThe three case studies touch on a range of related aspects of constructing with Hygroscopically Actuated Granular Materials. Detailed conclusions and evaluations have been given in the respective project chapters. The following paragraphs conse-quently give a comparative evaluation of the three projects.
On a practical level of design, case study 1 and case study 3 use a very similar particle geometry, with the only difference being the introduction of a static middle stick in the latter. This specific geometry allows the granular material to move from loose to entangled and to increase in volume under actuation. The middle stick potentially enhances this volume change, though quan-titative studies need to be conducted. Case study 2 develops a different strategy of combining two particle types: static, non-actuated sticks and dynamic, actuated spirals. This enables a more low-cost production of the granular material. With regard to distribution of the granular material, cases 1 and 3 explore ordered layouts, and case study 2 investigates unordered mixes. Both avenues prove valid, yet unordered arrangements appear to be more in line with the rapid and macro-scale application of granular materials in general.
On a methodological level of design, the case studies progress from experiments conducted mainly in a controlled-humidity chamber, to experiments conducted under ambient humidity, to experiments under ambient humidity in combination with simulations. All of these methods have been conducted without using statistical repetition, predictive modeling, or optimiza-tion. Consequently, they can be considered to be building the tools and techniques for working with Hygroscopically Actuated Granular Materials, yet they are still operating on a basic
methodological level.
On a conceptual level of design, the case studies challenge conventional notions of control and permanence in an archi-tectural structure. While case study 1 still aims for control over the final geometry, and mainly observes the final state of the structure, case studies 2 and 3 start to loosen that ground. Case study 2 introduces random mixes of particles, looking at the granular material as a mass rather than an assembly of particles, and case study 3 observes the structure over a longer period of alternating humidity conditions. None of the three cases yet fully embrace the shift from control and permanence to observation and reconfiguration of a structure. They merely point the way.
OUTLOOKIn line with the three case studies, future research into Hygroscopically Actuated Granular Materials needs to address practical, methodological, and conceptual levels of design.
Practical developments will address the bilayer material and its suitability for mass production, potentially moving from wood to an industrially produced semi-finished product. The catalogue of particle geometries will be widened. With regard to the distri-bution of the particles, the tendency would be to investigate randomly mixed particles over precise layouts. The actuation will happen increasingly under actual ambient humidity conditions.
On a methodological level, the goal is ultimately the integration of the methods for experimentation and simulation in order to arrive at predictive modeling for Hygroscopically Actuated Granular Materials. These predictive models are especially rele-vant with regard to the exploration of a wide range of particle
8 A cable-driven parallel robot was installed in a hall measuring 9 by 12 m in span (left). 2000 particles were laid out in overlapping lattices using a custom-made effector (right).

230 Smart Granular Materials Dierichs, Wood, Correa, Menges
shapes potentially using inverse models of design (Jain, Bollinger, and Truskett 2014; Miskin and Jaeger 2013). Conceptually, the aim for a pre-defined and singular geometry will be replaced by statistical observations and, based on that, increasingly reliable predictions of potential configurations and their development over time.
Smart granular materials can find suitable application in the building sector as a form of reconfigurable and recylable construction materials. Being reconfigurable denotes that a part of the structure can be rearranged. Being recyclable implies that the entire granular material can be deployed multiple times for different applications.
While the paradigms of reconfigurability and recyclability pertain to all loose granular materials in architectural construction, smart granular materials have the added benefit that the particles display different geometries under determined conditions. Consequently, these systems offer different construction proper-ties over the course of time.
ACKNOWLEDGEMENTSThe authors would like to thank Ondrej Kyjanek and Martin Loucka for the development of the cable-driven parallel robot as well as Andreas Kulla and Matthias Helmreich for their knowl-edge and effort in wood manufacturing. They would also like to express their gratitude to the Holcim Awards for Sustainable Construction, the GettyLab, and the Domaine de Boisbuchet for supporting the research. Funding for David Correa was provided by Natural Sciences and Engineering Research Council of Canada.
REFERENCESAejmelaeus-Lindström, Petrus, Jan Willmann, Skylar Tibbits, Fabio Gramazio, and Matthias Kohler. 2016. "Jammed Architectural Structures:
Towards Large-Scale Reversible Construction." Granular Matter 18 (2): 28.
doi:10.1007/s10035-016-0628-y.
Athanassiadis, Athanasios G., Marc Z. Miskin, Paul Kaplan, Nichols
Rodenberg, Seung Hwan Lee, Jason Merritt, Eric Brown, John Amend,
Hod Lipson, and Heinrich. M. Jaeger. 2014. “Particle Shape Effects on
the Stress Response of Granular Packings.” Soft Matter 10 (1): 48–59.
doi:10.1039/C3SM52047A.
Blouwolff, J., and S. Fraden. 2006. “The Coordination Number of Granular
ylinders.” Europhysics Letters 76 (6): 1095–1101.
Correa, David, Athina Papadopoulou, Christophe Guberan, Nynika Jhaveri,
Steffen Reichert, Achim Menges, and Skylar Tibbits. 2015. “3D-Printed
Wood : Programming Hygroscopic Material Transformations.” 3D-Printing
and Additive Manufacturing 2 (3): 106–16. doi:10.1089/3dp.2015.0022.
de Gennes, Pierre-Gilles. 1999. “Granular Matter: A Tentative
View.” Reviews of Modern Physics 71 (2): S374-S382. doi:10.1103/
RevModPhys.71.S374.
Dierichs, Karola, and Achim Menges. 2012. “Aggregate structures:
Material and machine computation of designed granular substances.”
Architectural Design 82 (2): 74–81.
———. 2015. “Granular Morphologies: Programming Material Behaviour
with Designed Aggregates.” Architectural Design 85 (5): 86–91.
———. 2016. “Towards an Aggregate Architecture: Designed Granular
Systems as Programmable Matter in Architecture.” Granular Matter 18
(25): 1–14. doi:10.1007/s10035-016-0631-3.
Duro-Royo, Jorge, Laia Mogas-Soldevila, and Neri Oxman. 2015. “Flow-
Based Fabrication: An Integrated Computational Workflow for Design
and Digital Additive Manufacturing of Multifunctional Heterogeneously
Structured Objects.” Computer-Aided Design 69: 143–154. doi:10.1016/j.
cad.2015.05.005.
Franklin, Scott V. 2012. “Geometric Cohesion in Granular Materials.”
Physics Today 65 (9): 70–71. doi:10.1063/PT.3.1726.
———. 2014. “Extensional Rheology of Entangled Granular
Materials.” EPL (Europhysics Letters) 106 (5): 58004. http://stacks.iop.
org/0295-5075/106/i=5/a=58004.
Gravish, Nick, Scott V. Franklin, David L. Hu, and Daniel I. Goldman. 2012.
“Entangled Granular Media.” Physical Review Letters 108 (20): 208001-1 to
208001-4. doi:10.1103/PhysRevLett.108.208001.
Helmreich, Matthias. 2015. “Hygrogates: Climate Responsive
Construction Principles of Hygroscopic Aggregate Structures.” Master's
Thesis, University of Stuttgart.
Hensel, Michael, and Achim Menges. 2006a. “Anne Hawkins and Catie
Newell Aggregates 02 2004: [Project Description].” In Morpho-Ecologies,
edited by Michael Hensel and Achim Menges, 274–83. London: AA
Publications.
———. 2006b. “Eiichi Matsuda Aggregates 01 2003-2004: [Project
Description].” In Morpho-Ecologies, edited by Michael Hensel and Achim.
Menges, 262–71. London: AA Publications.
Holstov, Artem, Ben N. Bridgens, and Graham Farmer. 2015.
“Hygromorphic Materials for Sustainable Responsive Architecture.”
Construction and Building Materials 98: 570–82. doi:10.1016/j.
conbuildmat.2015.08.136.
Jaeger, Heinrich M. 2015. “Celebrating Soft Matter's 10th Anniversary:
Toward Jamming by Design.” Soft Matter 11 (1): 12–27. doi: 10.1039/
c4sm01923g.
Jaeger, Heinrich M., Sidney R. Nagel, and Robert P. Behringer. 1996.
“Granular Solids, Liquids, and Gases.” Reviews of Modern Physics 68 (4):

231ACADIA 2017 | DISCIPLINES + DISRUPTION
1259–73.
Jain, Avni, Jonathan A. Bollinger, and Thomas M. Truskett. 2014. “Inverse
Methods for Material Design.” American Institute of Chemical Engineers
Journal 60 (8): 2732–40.
Keller, Sean, and Heinrich M. Jaeger. 2016. “Aleatory Architectures.”
Granular Matter 18 (29): 1–11. doi:10.1007/s10035-016-0629-x.
Ludewig, F., and N. Vandewalle. 2012. “Strong Interlocking of Nonconvex
Particles in Random Packings.” Physical Review E 85 (5): 051307.
doi:10.1103/PhysRevE.85.051307.
Malinouskaya, I., V. V. Mourzenko, J.-F. Thovert, and P. M. Adler. 2009.
“Random Packings of Spiky Particles: Geometry and Transport Properties.”
Physical Review E 80 (1): 011304. doi:10.1103/PhysRevE.80.011304.
Meng, L., S. Li, P. Lu, T. Li, and W. Jin. 2012. “Bending and Elongation
Effects on the Random Packing of Curved Spherocylinders.” Physical
Review E 86 (6): 061309. doi:10.1103/PhysRevE.86.061309.
Menges, Achim, and Steffen Reichert. 2015. “Performative Wood:
Physically Programming the Responsive Architecture of the HygroScope
and HygroSkin Projects.” Architectural Design 85 (5): 66–73.
Miskin, Marc Z., and Heinrich M. Jaeger. 2013. “Adapting Granular
Materials Through Artificial Evolution.” Nature Materials 12: 326–331.
Mogas-Soldevila, Laia, Jorge Duro-Royo, Markus Kayser, Daniel Lizardo,
William Patrick, Sunanda Sharma, Steven Keating, John Klein, Chikara
Inamura, and Neri Oxman. 2015. “Designing the Ocean Pavilion:
Biomaterial Templating of Structural, Manufacturing, and Environmental
Performance.” In Proceedings of the International Association for Shell and
Spatial Structures Symposium. 1–9. Amsterdam: IASS.
Murphy, Kieran A., Nikolaj Reiser, Darius Choksy, Clare E. Singer, and
Heinrich M. Jaeger. 2016. “Freestanding Loadbearing Structures with
Z-Shaped Particles.” Granular Matter 18 (26): 1–9.
Philipse, Albert P. 1996. “The Random Contact Equation and its
Implications for (Colloidal) Rods in Packings, Suspensions, and Anisotropic
Powders.” Langmuir 12 (5): 1127–33. doi:10.1021/la950671o.
Reichert, Steffen, Achim Menges, and David Correa. 2014.
“Meteorosensitive Architecture: Biomimetic Building Skins Based on
Materially Embedded and Hygroscopically Enabled Responsiveness.”
Computer-Aided Design 60: 50–69. doi:10.1016/j.cad.2014.02.010.
Reis, Pedro M., Heinrich M. Jaeger, and Martin van Hecke. 2015.
“Designer Matter: A Perspective.” Extreme Mechanics Letters 5:25–29.
doi:10.1016/j.eml.2015.09.004.
Rüggeberg, Markus, and Ingo Burgert. 2015. “Bio-Inspired Wooden
Actuators for Large Scale Applications.” Plos One 10 (4): e0120718.
doi:10.1371/journal.pone.0120718.
Sung, Doris. 2016. “Smart Geometries for Smart Materials: Taming
Thermobimetals to Behave.” Journal of Architectural Education 70 (1):
96–106. http://dx.doi.org/10.1080/10464883.2016.1122479.
Timoshenko, S. 1925 "Analysis of Bi-metal Thermostats." Journal of the
Optical Society of America and Review of Scientific Instruments 11( 3):
233–255.
Trepanier, M., and Scott V. Franklin. 2010. “Column Collapse of
Granular Rods.” Physical Review E 82 (1): 011308. doi:10.1103/
PhysRevE.82.011308.
Tsubaki, Kentaro. 2012. “Tumbling Units: Tectonics of Indeterminate
Extension.” In Matter: Material processes in architectural production, edited
by Gail P. Borden and Michael Meredith, 187–203. London: Routledge.
Wolkow, A. 2016. “Selectively Self-Reinforcing Aggregates: A Two
Particle-Type Granular System for Performance in Tension.” Master's
Thesis, University of Stuttgart.
Wood, Dylan, David Correa, Oliver Krieg, and Achim Menges.
2016. “Material Computation--4D Timber Construction: Towards
Building-Scale Hygroscopic Actuated, Self-Constructing Timber
Surfaces.” International Journal of Architectural Computing 14 (1): 49–62.
doi:10.1177/1478077115625522.
IMAGE CREDITSInstitute for Computational Design and Construction (ICD), University of
Stuttgart
KarolaDierichs*is a PhD researcher at the Institute for Computational
Design and Construction (ICD), University of Stuttgart.
DylanWood* is a PhD researcher at the ICD, University of Stuttgart.
David Correa is a PhD researcher at the ICD, University of Stuttgart.
Achim Menges is the director of the ICD, University of Stuttgart.