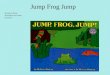
Jump Dynamics Simulation of take off Reinforced the need for hard stops on legs Inputs Joint moments Lengths Masses/CM locations Initial Angles Outputs IC’s for free flight -1 -0.5 0 0.5 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 D istance [m ] Height[m] Take O ffAnimation
Jump Dynamics. Simulation of take off Reinforced the need for hard stops on legs Inputs Joint moments Lengths Masses/CM locations Initial Angles Outputs IC’s for free flight. Jump Dynamics. Future – implement series of event detections Fix each link when it reaches 45° - PowerPoint PPT Presentation
Citation preview
Jump Dynamics
Jump DynamicsSimulation of take offReinforced the need for hard
stops on legsInputsJoint momentsLengthsMasses/CM locationsInitial
AnglesOutputs ICs for free flight
Jump DynamicsFuture implement series of event detectionsFix each
link when it reaches 45Remove the ground constraints at each foot
when the normal force is zero
Free Flight DynamicsSimulation models free flight of tigerICs
neededAngles and rate of changePosition of footUsesTest different
setupsFind spring force needed for return
Free Flight DynamicsInputsSpring coefficientDamping
coefficientsCenters of massMassesLengthsOutputsDistance
traveledAnimation/ positioningTime for joint return
Free Flight AnimationFuture workAdjust system parametersEvent
detectionReceive ICs from jump program
![Jump to content [s] • Jump to site navigation [0] • Jump ... · Page 1 of 22 Untitled 2 24 2006 2 12 21 55 4:55 AM • Jump to content [s] • Jump to site navigation [0] •](https://img.pdfslide.us/doc/110x75/60632e5d2e4a9920bc5588e3/jump-to-content-s-a-jump-to-site-navigation-0-a-jump-page-1-of-22-untitled.jpg)


![[moves] - Neo-Arcadianeo-arcadia.com/neoencyclopedia/garou_mark_of_the_wolves_moves.pdf · close Tai-otoshi jump close Tai-hineri Command Moves then quickly jump Super Jump jump on](https://img.pdfslide.us/doc/110x75/5c11acf309d3f2b60f8c601d/moves-neo-arcadianeo-close-tai-otoshi-jump-close-tai-hineri-command-moves.jpg)